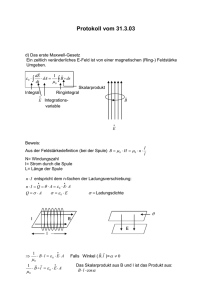
∫° ∫= ∫° ∫= ∫° dA 0= ∫° ∫=
Werbung

Magnetostatik 6 Seite 111 Magnetostatik 6.1 Vereinfachung der Grundgesetze für die Magnetostatik Was heißt „Magneto-statik“? „Magneto-“: Wir wollen uns nur mit magnetischen Feldern, den darin auftretenden Kräften und deren Wirkungen beschäftigen, nicht mit elektrischen Feldern und Kräften. „statik“: Wir wollen uns nicht mit zeitlich veränderlichen magnetischen Feldern befassen. Nur magnetische Felder heißt: E = 0 und ∂E ⁄ ∂t = 0 , dann wird aus (4) 1 (4) ----- ∫ Bds = µ 0°Γ ∂ ∫ S + ε0 ∂ t E d A die Gl. (4‘) A 1 (4‘) ----- ∫ Bds = µ 0°Γ ∫ S dA A Ähnlich wird aus (5) (5) F = q ( E + v × B ) die Gl. (5‘‘) (5‘‘) F = q ⋅ v × B Die Gl. (1) beschreibt nur E und entfällt. Nur statische Felder heißt ∂B ⁄ ∂t = 0 , so daß Gl. (2) entfällt. Es gelten also die Gesetze der Magnetostatik (3) °A∫ B d A = 0 1 (4‘) ----- ∫ Bds = µ 0°Γ ∫ S dA A (5‘‘) F = q ⋅ v × B Seite 112 GET-Skript Bitte keine Analogien zwischen E und B (manche Lehrbücher!!). Merke: B -Feld hat Zirkulation, aber keine Quellen (keine magnetische Ladung!), E -Feld (statisch) hat Quellen, aber keine Zirkulation. Also auch bei Magnetostatik enorme Vereinfachung. Es gibt eine Reihe von elektrotechnischen Aufgaben, die mit diesen vereinfachten Gleichungen gelöst werden können. Es lassen sich dann wieder vereinfachte Formeln herleiten, die dann aber nur für magnetostatische Probleme gelten. Bemerkung. Ein elektrostatisches E -Feld setzte voraus, daß die Quellen des E -Feldes (Ladungen) sich nicht bewegen. Ein magnetostatisches Feld, das nach Gl. (4‘) von der Stromdichte S erzeugt wird, setzt voraus, daß sich S nicht ändert. Das ist z. B. immer der Fall, wenn sich Ladungen als konstante Ströme in Leitern bewegen. 6.2 Die Lorentz-Kraft 6.2.1 Regeln für den Umgang mit äußeren Vektorprodukten (Kreuzprodukten) Die Schreibweise F = q ⋅ v × B besagt: Die Kraft ist F ist an jedem Ort - senkrecht zur Geschwindigkeit v senkrecht zur Feldstärke B proportional zum Betrag der Geschwindigkeit v proportional zum Betrag des Feldes B und proportional zum sin ϑ des Winkels ϑ zwischen v und B . Dieses Richtungsverhalten läßt sich durch das „äußere Produkt“, das „Kreuzprodukt“ zwischen v und B vollständig beschreiben. v × B = v ⋅ B ⋅ sin ϑ ⋅ e ⊥ = v ⋅ B ⋅ sin ϑ ⋅ e ⊥ e ⊥ steht ⊥B und ⊥v e ⊥ geht in Richtung einer Rechtsschraube, wenn man v auf kürzestem Weg in B „hineindreht“. Das Ergebnis ist ein Vektor. Magnetostatik Seite 113 Bildlich: B B v Rechtsgewinde v e⊥ e⊥ Achtung! v × B = – B × v Zum Vergleich: Inneres Produkt oder skalares Produkt, z. B. E ⋅ ds = E ⋅ ds ⋅ cos ϑ = ds ⋅ E Ergebnis ist Zahl, Skalar. Beispiel: Lorentzkraft auf Elektronenstrahl im Magnetfeld. F -e − B ϑ v e⊥ Auf ein Elektron der Ladung q = - e wirkt dann die Kraft F = ( – e ) ⋅ v × B = ( – e ) ⋅ v ⋅ B ⋅ sin ϑ ⋅ e ⊥ Das Magnetfeld B (magnetische Induktion) wurde anhand seiner Kraftwirkung auf bewegte Ladungen definiert mit F = q ⋅ υ × B . So ergibt sich die Einheit von B als VAs 1 N N Vs [ B ] = --------------------- = -------- = ---------- ⋅ -------- = ------2 m Am As ⋅ m ⁄ s Am m Wegen der Wichtigkeit in der Elektrotechnik hat die zusammengesetzte Einheit [ B ] auch den Namen 1 Tesla (früher 104 Gauß) erhalten. Vs 4 4 [ B ] = 1 ------2 = 1Tesla = 1T = 10 Gauss = 10 G m (Erdfeld ≈ 1 Gauß, el. Maschinen ≈ 1 T) Seite 114 GET-Skript 6.2.2 Kraft auf stromdurchflossende Leiter Darstellung der Lorentzkraft im stromdurchflossenen Leiter mit der Stromdichte S Beispiel: Elektronenleitung F B − v I A − − I B dl Auf jedes Elektron mit Ladung q = -e wirkt F e = – e ⋅ v × B Wir nehmen zunächst an, daß alle Elektronen gleiche Geschwindigkeit v in Größe und Richtung haben. Im Volumenelement dV = A ⋅ dl sind n Elektronen, also wirkt auf dV die Gesamtkraft dF mit n ⋅ ( –e ) dF = n ⋅ F e = n ⋅ ( – e ) ⋅ v × B = dV ⋅ ------------------ ⋅ v × B dV n ⋅ ( –e ) oder weil ------------------ = ρ die Ladungsdichte ist, gilt dV dF = dV ⋅ ρ ⋅ v × B und mit S = ρ ⋅ v dF = dV ⋅ S × B Lorentz-Kraft auf dV bei Stromdichte S Da S unabhängig von Polarität der Ladungsträger definiert ist, gilt dies auch für positive Ladung. Da S unabhängig von der Geschwindigkeitsverteilung der Ladungsträger ist, kann die obige Einschränkung entfallen. Darstellung Lorentz-Kraft auf einen Leiter durch Strom I. Wir beschreiben die Länge dl des Leiter-Stücks als Vektor dl in Richtung S , dann wird dV ⋅ S = dl ⋅ A ⋅ S = dl ⋅ I und dF = I ⋅ dl × B Lorentzkraft auf Leiterlänge dl bei Strom I Magnetostatik Seite 115 Oft interessiert man sich (z. B. bei Maschinen) für die Kraft/Leiterlänge, den „Kraftbelag“ dF ⁄ dl und erhält dl dF ⁄ dl = I ⋅ ----- × B Kraftbelag dl Zur Berechnung der Gesamtkraft F muß die Kraft dF pro Leiterlänge dl über den gesamten Leiter aufintegriert werdne. Beispiel: Gerades Leiterstück, Länge l , B homogen über l . F = l ∫0 dF = l ∫0 I ⋅ d l × B Weil B homogen ist, hat B an jeder Stelle von l gleiche Größe und gleiche Richtung. Weil der Draht gerade ist, hat dl auf der ganzen Länge die gleiche Richtung, also ist auch der Winkel ϑ zwischen dl und B überall gleich, d. h. sin ϑ = const. Dann gilt Spezialfall 1: F = l ∫0 I ⋅ B ⋅ sin ϑ ⋅ e⊥ ⋅ dl F = I ⋅ l ⋅ B ⋅ sin ϑ F = I⋅l×B = I ⋅ B ⋅ sin ϑ ⋅ e ⊥ ⋅ l oder Kraft auf geraden Leiter l 6.2.3 Drehmoment auf stromdurchflossenen Schleifen im homogenen Feld B Beispiel: Rechteckige Leiterschleife, B homogen l1 A B α I I l4 l2 l3 l2/2 α F1 l2 F3 A B l 2 und l 4 sind bis auf das Vorzeichen gleich, ebenso l 1 und l 3 , also l 1 = – I 3 und l 2 = – I 4 , also auch F 1 = I ⋅ l1 × B = –I ⋅ l3 × B = –F 3 Seite 116 GET-Skript F 2 = I ⋅ l2 × B = –I ⋅ l4 × B = –F 4 Es gibt also keine resultierende Gesamtkraft, die die Leiterschleife verschiebt. Aber: F 1 = – F 3 bilden ein Kräftepaar, also Drehmoment T l2 T 1 = ---- ⋅ F 1 ⋅ sin α = T 3 ; T = T 1 + T 3 . 2 Nun ist bei l 1 ⊥B F 1 = I ⋅ l 1 ⋅ B ⋅ sin 90° = I ⋅ l 1 ⋅ B und T = l 2 ⋅ l 1 ⋅ I ⋅ B ⋅ sin α = A ⋅ I ⋅ B ⋅ sin α bzw. T = I⋅A×B A ist der bekannte Flächenvektor. Wir vereinbaren dabei die Richtung von A in Bewegungsrichtung der Schraube, wenn I in Drehrichtung fließt. Rechtsschraube I A I A Auf eine Spule mit N Windungen wirkt das N-fache Moment, also m T = N⋅I⋅A×B = m×B m ist die von der Spule abhängige Proportionalitätskonstante zwischen Drehmoment T und B . Diese Konstante heißt das Magnetische Moment einer Spule (auch magnetisches Dipolmoment). Magnetostatik Seite 117 6.3 Berechnung von B -Feldern 6.3.1 Es gibt keine magnetischen Ladungen Wie in Elektrostatik gibt es auch in der Magnetostatik zwei „Feldgleichungen“ (3), (4‘) Gl. (3) °A∫ B d A = 0 besagt: Es gibt keine magnetischen Ladungen Bildlich: Die Feldlinien von B können nirgends beginnen und nirgends enden. Im allgemeinen schließen sich die Feldlinien von B in sich selbst. Bei Feldberechnungen muß mit ∫ A B d A = 0 die „Form“ von B ° überprüft werden, ob wirklich keine Quellen vorhanden sind. Das entspricht der Überprüfung elektrostatischer Felder mit ∫ Eds = 0 auf Zirkulationsfreiheit der „Feldform“. °Γ Achtung: ∫ B d A = 0 gilt immer, °A °Γ∫ Eds = 0 nur in Elektrostatik 6.3.2 Durchflutungsgesetz, Ampere‘sches Gesetz In der Magnetostatik ergibt sich die Größe des B-Feldes (Induktion) aus 1 ----- ∫ Bds = µ0° Γ ∫ S dA A In Worten: Fließt durch eine Fläche A mit dem Rand Γ ein Strom der Stromdichte S , so ist der gesamte Strom durch diese Fläche ∫A S d A gleich dem Linienintegral über B ⁄ µ0 längs dem Rand Γ der stromdurchflossenen Fläche. Die Richtung von B muß festgelegt werden. A B S Rechtsschraube Seite 118 GET-Skript Man legt fest: Fließt der Strom S in Bewegungsrichtung einer Rechtsschraube, so verläuft B in Drehrichtung. Da ∫ S d A in fast allen elektrotechnischen Problemen durch StröA me in Leitung entsteht, schreibt man auch oft 1 ----- ∫ Bds = I ges Ampere‘sches Gesetz µ0° Γ In dieser Schreibweise muß man daran denken, daß Iges bei mehreren Windungen das n-fache des in der Leitung fließenden Stromes sein kann, wenn der Draht in n Windungen durch die von Γ umrandete Fläche fließt! Die Bezeichnung Durchflutung Θ für den Gesamtstrom durch A vermeidet diese Schwierigkeiten: als Durchflutung Θ bezeichnet man Θ = ∫A S d A = I gesamt durch A Wenn nun ein Draht mit Strom I mehrfach in gleicher Richtung durch A läuft, z. B. n-mal, dann ist Θ = n ⋅ I und 1 ----- ∫ Bds = Θ µ0° Durchflutungssatz Γ 6.3.3 Berechnung symmetrischer Felder aus dem Durchflutungsgesetz Beispiel: B -Feld eines langen, geraden Leiters B ( r, ϕ, z ) I r ϕ I Hier: Berechnung in Zylinderkoordinaten vorteilhaft Magnetostatik Seite 119 Am betrachteten Punkt (r,ϕ, z) hat B eine radiale Komponente B r = B r (r,ϕ, z) sowie die beiden tangentialen Komponenten B z = B z (r,ϕ, z) und B ϕ = B ϕ (r,ϕ, z) , wobei B r ⊥B z ⊥B ϕ . B wird also beschrieben durch den Vektor B r (r,ϕ, z) B (r,ϕ, z) = B ϕ (r,ϕ, z) B z (r,ϕ, z) Wegen ∫ Bd A = 0 ist B r (r,ϕ, z) = 0 °A Die magnetischen Feldlinien können also nur um den Leiter herum geschlossen sein und müssen aus Symmetriegründen kreisförmig verlaufen. Es bleibt nur die tangentiale Komponente B ϕ (r,ϕ, z) und somit wird B (r,ϕ, z) = ( 0, B ϕ (r,ϕ, z), 0 ) . Aus den genannten Symmetriegründen hängt die tangentiale Komponente nur vom Abstand r, nicht aber von z oder ϕ ab, also B (r,ϕ, z) = ( 0, B ϕ ( r ), 0 ) = B ϕ ( r ) ⋅ e ϕ . wobei e ϕ ein Einheitsvektor in tangentialer Richtung ist. Für dieses B-Feld läßt sich aber die Gl (4‘) auswerten, weil ds die Richtung e ϕ hat, also e ϕ ⋅ ds = ds ist (Spezialfall) 1 ----µ0 °∫ Bds Kreis 1 = ----µ0 °∫ Bϕ ( r ) ⋅ eϕ ⋅ ds Kreis 1 = -----B ϕ ( r ) ⋅ µ0 1 = -----B ϕ ( r ) ⋅ 2πr = I µ0 °∫ ds Kreis also µ0 ⋅ I B ϕ ( r ) = ----------- Feld eines geraden Leiters 2πr Mit der Schreibweise des Kreuzproduktes kann man B in Größe und Richtung beschreiben. Mit r z e r = - ; e z = - ist dann r z µ0 ⋅ I ez × er µ0 ⋅ I ez × r B = ------------ ⋅ --------------- oder B = ------------ ⋅ -----------2 2π r 2π r Seite 120 GET-Skript I r B Beispiel: Kraft zwischen zwei parallellen geraden Leitern (Länge l, Abstand r. B2 B1 r 12 F1 I1 r 21 F2 I2 Es gilt F 1 = I 1 ⋅ l1 × B2 F 2 = I 2 ⋅ l2 × B1 Weil bei parallelen Drähten B 2 ⊥ l 1 bzw. B 1 ⊥ l 2 , wird aus Kreuzprodukt einfaches Produkt. Weiterhin sei r 12 = r 21 = r Es ist Richtung F 1 || r 12 , Richtung F 2 || r 21 und die Größe der Kräfte F 1 = I 1 ⋅ l ⋅ B2 I1 ⋅ I2 µ0 - ⋅ l ⋅ ------------- = F = ----2π r F 2 = I 2 ⋅ l ⋅ B1 Mit dieser Beziehung läßt sich die Stromstärke (1A) bzw. Ladung (1As) festlegen: 1 Ampere ist die Stärke eines Stromes, der durch zwei im Vakuum parallel im Abstand 1 m voneinander angeordnete, geradlinige, unendlich lange Leiter von vernachlässigbar kleinem Querschitt –7 fließend je Meter Länge die Kraft von 2 ⋅ 10 N hervorruft. Magnetostatik Seite 121 Die Permeabilitätskonstante (Permeabilität) µ 0 wurde damit festgesetzt zu –7 2 ⋅ 10 N 2π ⋅ 1m 2πr - = ----------------------- ⋅ -----------------µ 0 = ( F ⁄ l ) ⋅ -------2 2 1m 1A I µ 0 = 4π ⋅ 10 –7 N – 7 Tm ⋅ -----2- = 4π ⋅ 10 ⋅ -------A A Beispiel: Berechnung B -Feld einer langen, zylindrischen Spule (Solenoid). d c l a b Γ Für eine rechteckige Schleife Γ = a,b,c,d die auf der Länge l = a,b N Leiter umschließt, gilt das Durchflutungsgesetz: 1 Θ = ----- ∫ B ds µ 0°Γ mit Θ = I ⋅ N = Strom mal Windungen durch Rand Γ . 1 b 1 a 1 c 1 d Θ = ----- ∫ B ds + ----- ∫ B ds + ----- ∫ B ds + ----- ∫ B ds µ0 a µ0 b µ0 c µ0 d Es ist c ∫b B ds = a ∫d B ds = 0, weil B dort ⊥ds . Weiter ist d ∫c B ds = 0, weil außerhalb der Spule B = 0 ist (Beweis hier nicht möglich). Der einzige Beitrag kommt von B im Inneren der Spule, und dieses B ist parallel zur Spulenachse und konstant bei Verschiebung des Rechteckes Γ längs der Spule. Dann ist B b 1 b B⋅l Θ = ----- ∫ B ds = ----- ∫ ds = --------- ,also I ⋅ N = B ⋅ l ⁄ µ 0 oder µ0 a µ0 a µ0 B = µ 0 ⋅ I ⋅ N ⁄ l B-Feld eines Solenoids Mit n = N ⁄ l schreibt man oft auch B = µ0 ⋅ I ⋅ n Seite 122 GET-Skript 6.3.4 Berechnung beliebiger Magnetfelder mit bekannter Stromverteilung (Biot-Savart‘sches Gesetz) Das elektrostatische Feld E einer bekannten Ladungsverteilung konnte man sich als Superposition der E -Felder von allen Punktladungen vorstellen, aus denen die Ladungsverteilung aufgebaut ist. Ähnlich kann man das statische Magnetfeld sich als Superposition der B -Felder von allen Stromelementen vorstellen, aus den die Stromverteilung aufgebaut ist. Dies ist jedoch mit den z.Z. verfügbaren Werkzeugen nicht herleitbar. Deshalb soll nur das Ergebnis gezeigt werden: Ein Element eines beliebigen Leiters mit Länge ∆l i erzeugt bei Strom I am Ort (1) einen Beitrag ∆l i × r 1i I B i ( 1 ) = ------ ⋅ µ 0 ⋅ ------------------3 4π r 1i I ∆l i Bi ( 1 ) r 1i (1) der gesamte Leiter also ein Feld B(1) = µ 0 ⋅ I ∆l i × r 1i ⋅ ------------------∑ -----------3 4π r 1i i und im Grenzfall unendlich kurzer Elemente dl µ 0 ⋅ I dl 2 × r 12 B ( 1 ) = ------------ ∫ -------------------- Biot-Savart‘sches Gesetz 3 4π r 12 I (2) ∆l 2 dB ( 1 ) r 12 (1) Magnetostatik Seite 123 6.4 Materie im magnetischen Feld 6.4.1 Magnetische Werkstoffe und deren Eigenschaften Beobachtung: Bringt man in eine vom Strom I durchflossene Spule Materialien, so ändert sich B , obwohl die Spule (N/L, also Windungszahl /Länge) und der Strom (I) unverändert sind Entweder: Durchflutungssatz und die daraus berechnete Beziehung B = µ 0 ⋅ I ⋅ N ⁄ l ist falsch Oder: Es fließen zusätzlich zum Strom ISpule weitere Ströme im Material und damit durch den Integrationsweg Γ . Γ zusätzl. Ströme I I B B IM Die zusätzlichen Ströme IMaterial können in der gleichen Richtung wie I fließen und dabei B vergrößern und zwar - kaum merklich (Paramagnetismus) - extrem stark (Ferromagnetismus). Die zusätzlichen Ströme können auch zu ISpule entgegengesetzt fließen und B - kaum spürbar schwächen (Diamagnetismus). Damit ergibt sich ein B -Feld B = µ 0 ( I Spule + I Material ) ⋅ N ⁄ l Seite 124 GET-Skript 6.4.2 Der Magnetisierungsvektor M In 5.10.2 hatten wir gesehen, daß im Dielektrikum durch atomare Dipolmomente eine zusätzliche Oberflächenladung entstanden war. Ähnlich entstehen bei Materialien im Magnetfeld durch atomare magnetische Momente zusätzliche Oberflächenströme. Wir denken uns die atomaren magnetischen Momente m als rechteckige Stromschleifen mit Strom IMaterial und Fläche A M , die in Richtung des Moments m den Abstand d haben. AM m IM d Alle Ströme zwischen solchen Würfeln heben sich auf. Bei einer aus Würfeln zusammengesetzten Scheibe der Dicke d und Fläche A bleibt ein Strom I M nur längs des Randes von A . A IM d Ein Stück Material mit Länge l , also N Scheiben der Dicke d entspricht der Spule mit N Windungen pro Länge l mit dem Strom IMaterial. Magnetostatik Seite 125 l A IM d Das von den magnetischen Momenten erzeugte B -Feld ist (siehe Spule) B zusaetzlich = µ 0 I Material ⋅ N ⁄ l Bei N Scheiben hat man N ⋅ A ⁄ A M Momente, also im Volumen l ⋅ A eine Anzahl Momente/Volumen = N M : N⋅A N N M = ---------------------- = ------------AM ⋅ l ⋅ A Am ⋅ l Bezeichnen wir als Magnetisierung M das Magnetische Moment pro Volumen, also M = N M ⋅ m , so ist M auch I Material ⋅ N A M N ⋅ I Material ⋅ A M N⋅m - = ----------------------------- ⋅ -------M = -------------- = ----------------------------------------AM l AM ⋅ l AM ⋅ l M ist also ein Vektor mit der Größe M = I Material ⋅ N ⁄ l und der Richtung A M . Das oben berechnete B zusaetzlich = µ 0 I Material ⋅ N ⁄ l läuft ebenfalls in Richtung A und so ist B zusaetzl. = µ 0 ⋅ M Das gesamte B -Feld mit Materie ist dann B = B Spule + B zusaetzl. = B Spule + µ 0 ⋅ M In gewissen Grenzen wird M zum B -Feld der Spule proportional sein (wie im Dielektrikum P ∼ E war), also M ≈ χ ⋅ B Spule ⁄ µ 0 Seite 126 GET-Skript Unter dieser Voraussetzung ist B = B Spule + µ 0 ⋅ M = B Spule ( 1 + χ ) Setzt man 1 + χ = µ r , so ist B = B Spule ⋅ µ r Die magnetische Suszeptibilität χ bzw. die relative Permeabilität µ r drücken Materialeigenschaften aus und sind im allgemeinen nicht konstant. Entsprechend der Einteilung in 6.4.1 gilt: - Diamagnetische Stoffe: µ r = ( 1 + χ ) ≤ 1 - Paramagnetische Stoffe: µ r = ( 1 + χ ) ≥ 1 - Ferromagnetische Stoffe: µ r = ( 1 + χ ) » 1 6.4.3 Magnetische Induktion B und Magnetfeld H in Materie Entsprechend der „Erregung“ magnetischer Felder durch Ströme wird häufig das „Magnetische Feld“, die „Magnetische Erregung“ (ohne Proportionalitätskonstante µ 0 zwischen Strom und Magnetfeld) durch den Vektor H beschrieben. °∫Γ H ds = Θ Mit H werden folgende weitere Begriffe eingeführt: 2 ∫ H ds = V m = magnetischeSpannung 1 °∫Γ H ds ° = V m = magnetischeRandspannung ° Achtung: Bei der Fesatlegung von H , V m bzw. V m wurden bewußt die von magnetischen Momenten im Material erzeugten ° Feldanteile nicht einbezogen. H , V m , und V m sind deshalb per Definition nur mit der Durchflutung durch äußere Ströme (Ströme in Leitungen) verknüpft! Demnach ist ohne Materie (Vakuum, näherungsweise Luft) B = µ0 ⋅ H Magnetostatik Seite 127 und mit Materie wegen µ 0 ⋅ H = def B Spule B = µ0 ( H + M ) und mit M ≈ χ ⋅ B spule ⁄ µ 0 = χ ⋅ H B = µ0 ⋅ ( 1 + χ ) ⋅ H = µ0 ⋅ µr ⋅ H = µ ⋅ H Die Materialgröße µ = µ r ⋅ µ 0 heißt auch absolute Permeabilität des Stoffes. Die Schreibweise mit H ist in der Praxis vorteilhaft, weil man zunächst H aus den äußeren Strömen direkt berechnen kann und daraus mit hilfe von Materialkonstanten B . Damit entfällt auch die Indizierung B Spule bzw. B Material . Die Grundgesetzte schreiben sich mit H in der (im Bereich der Elektrotechnik) üblichen Form (4‘) °∫Γ H ds = ∫A S d A und (3) °∫ Bd A = 0 Beachte: S sind hier alle äußeren Ströme, nicht die durch Magnetisierung verursachten. Zur Lösung braucht man dann jedoch noch die Materialgleichung. B = µ ⋅ H = µr ⋅ µ0 ⋅ H = ( 1 + χ ) ⋅ µ0 ⋅ H und diese enthält die (bei anisotropen Materialien nicht zutreffende) Annahme, daß χ eine skalare Konstante ist. 6.4.4 Diamagnetismus, Paramagnetismus, Ferromagnetismus Die atomaren magnetischen Momente m kommen entweder von - „umlaufenden“ Elektronen m IM − + A Seite 128 GET-Skript - „um die eigene Achse rotierende“ Elektronen m Beide Bilder sind sehr anschaulich, aber quantitativ falsch (klassisch, nicht quantenmechanisch)! Diamagnetismus (Wismut, Kupfer, Silber). Ohne H -Feld heben sich die Momente der Elektronen paarweise auf. ohne äußerem H-Feld m1 1 − mit äußerem H-Feld m1 H + − 2 1 − m2 + − 2 m2 Zusätzliche Lorentz Kräfte - auf (1) in Richtung der Zentrifugalkraft, - auf (2) entgegen der Zentrifugalkraft Deshalb muß (1) den Bahnradius verkleinern, die Zentrifugalkraft verringern und damit wird die Fläche und m 1 kleiner. Durch Vergrößerung des Bahnradius wird dagegen m 2 größer. Weil m 2 > m 1 , ist m = m 1 + m 2 entgegengesetzt zu H und –4 sehr klein; χ d ≈ – 10 . Paramagnetismus (Aluminium, Platin) Auch ohne H -Feld sind atomare magnetische Momente vorhanden, aber deorientiert. Durch das äußere Magnetfeld erfolgt Ausrichtung der Momente m in Richtung H , also χ p > 0 . Bei hohen Temperaturen zerstört die thermische Energie immer wieder die Ausrichtung, χ p ist also temperaturabhängig. –2 Bei Zimmertemperatur ist χ p ≈ 10 Magnetostatik Seite 129 Ferromagnetismus Bei Eisen, Kobalt, Nickel, Gadolinium, Dysprosium und deren Legierungen sind sehr starke magnetische Momente auch ohne H Feld vorhanden. Elektronenspins richten sich spontan parallel zueinander aus (also keine Eigenschaft des einzelnen Atoms!). Die Ausrichtung beschränkt sich auf kleine Bezirke (Weiß‘sche Beziehung), die ohne H unterschiedlich orientiert sind. Bei Temperaturen über einem kritischen Wert (Curiepunkt) hört die spontane Magnetisierung plötzlich auf. Die Größe der Weiß‘schen Bezirke ist durch das Energieminimum bzgl. äußerer Feldenergie und Wandenergie der Bezirke gegeben. N N S S S N Viel Feldenergie S N S N S N SN Keine weitere Reduzierung Weniger Feld- Praktisch kein d. äuß. Feldes, energie, jedoch äußeres Feld, jedoch zusätzl. 1 Wand jedoch 4 Wände Wände Wände enthalten Energie, weil ja gerade entgegengesetzt spinnende Elektronen benachbart sind und parallele Ausrichtung niedrigere Energie hat. Die Magnetisierungskurve Die Magnetisierungskurve stellt B Gesamt in Abhängigkeit von H dar ( H ∼ I Spule , B abhängig von Material!) B Neukurve Br 1 µ0Hc 10-6 µ0H -1 B r = Remanenz (induktion); H c = Koerzitivfeldstärke - Steiler Teil der Kurve: Wandverschiebung in Bezirken mit „leichter Richtung“ (reversibel). Seite 130 GET-Skript - Flacherer Teil der Kurve: Wandverschiebung mit „Überwindung von Hindernissen“ (nicht reversibel). - Flacher Teil der Kurve: Drehung Weiß‘scher Bezirke in Richtung H (viel Energie nötig; Sättigung; irreversibel). Weil Ausrichtung z. T. irreversibel, gibt es Hystereseschleife bzw. Neukurve. - Beim Zurücknehmen von H auf 0 bleibt eine Induktion B r (Remanenzinduktion). - Erst bei einer entgegengesetzten Feldstärke H c (Koerzitivfelstärke) geht B auf Null zurück. Die Fläche der Hystereseschleife ist ein Maß für die Energieverluste infolge irreversibler Vorgänge. 6.5 Der magnetisc he Kreis 6.5.1 Die Konstanz des magnetischen Flusses φ m A2 A1 d A2 d A1 dA Man definiert den Magnetischen Fluß φ m = d A stets in Richtung B zeigt. A ∫A B d A , wobei Leiter Weil aber nur in A 1 bzw. A 2 Induktion B ≠ 0 , und weil in ∫A Bd A = 0 vereinbarungsgemäß d A nach außen zeigt, ° Magnetostatik Seite 131 im Bild d A 1 aber nach innen, gilt 0 = °∫A Bd A also φ m1 = = – ∫ B d A1 + ∫ B d A2 A1 A2 ∫A B d A1 ∫A B d A2 = 1 = φ m2 2 oder im homogenen Feld φ m1 = B 1 A 1 = B 2 A 2 = φ m2 B1 A1 A2 B2 Weil φ m in der Elektrotechnik sehr wichtig ist, erhält es eine eigene Einheit: 2 [ φ m ] = 1Weber = 1Wb = 1T m = 1Vs 6.5.2 Das „sog. Ohm‘sche Gesetz des magnetischen Kreises“ In sich geschlossene Anordnungen aus hochpermeablen Materiallien (magnetischen Leitern) heißen magnetische Kreise und dienen zur Führung des magnetischen Feldes. lm A B I N Windg. Legt man die mittlere Länge des magnetischen Leiters mit lm fest, so gilt näherungsweise Θ = N⋅I = °∫ H ds = H ⋅ lm Wenn µ r im gesamten Kreis konstant, ist Seite 132 GET-Skript lm lm B⋅l Θ = H ⋅ l m = ------------m- = B ⋅ A ⋅ ---------------- = φ m ⋅ ---------------µr µ0 A µr µ0 A µr µ0 Wegen der Ähnlichkeit zum Ohm‘schen Gesetz schreibt man auch Θ = φm ⋅ Rm lm wobei R m = --------------- als magnetischer Widerstand bezeichnet µr µ0 A wird. l Zum Vergleich: U = I ⋅ R mit R = ----------κ⋅A Magnetischer KreisStromkreis ° Quellspannung Θ = V m U φm Strom I Widerstand R m R 6.5.3 Berechnung magnetischer Kreise Kreis mit i Abschnitten unterschiedlicher Materialien R mi auf Abschnitten der Länge l mi V° m = ∫ H ds = ° ∑ H i lmi = ∑ V mi = i i = φ m ∑ R mi = Θ = N ⋅ I Beispiel: B 1 gegeben, Θ gesucht lm1 I lm2 B lm3 φm = B1 ⋅ A1 V m1 = φ m ⋅ R m1 und V m2 = φ m ⋅ R m2 N ⋅ I = Θ = ( V m1 + V m2 ) ⋅ 2 Magnetostatik Seite 133 Ersatzschaltbild dazu Φm Vm1 Vm2 Θ Vm3 Vm4 Dies entspricht der Kirchhoff‘schen Maschenregel. Beispiel 2: Gegeben Θ 1 und Θ 2 ; gesucht φ m1, φ m2, φ m3 Hüllfläche A I1 I2 Θ1 Θ2 Φ m3 Φ m1 Φ m2 Weil ∫ Bd A = 0 durch Hüllfläche A, ist ° φ m3 = φ m1 + φ m2 Das entspricht der Kirchhoff‘schen Knotenregel. Ersatzschaltbild: Φ m1 Φ m2 Rm1 Θ1 Φ m3 Rm2 Rm3 linke „Masche“ Θ 1 = R m1 φ m1 + R m3 φ m3 rechte „Masche“ Θ 2 = R m2 φ m2 + R m3 φ m3 Θ2 Seite 134 GET-Skript Für die drei Unbekannten φ m1, φ m2, φ m3 sind also 3 Gleichungen - 2 Maschengleichungen - 1 Knotengleichung gegeben. Beispiel 3: Magnetischer Kreis mit Luftspalt (Motoren, Elektromagnet) lm1 I d B Reihenschaltung von R me des Eisens und R md des Luftspalts d. Die Kirchhoff‘sche Regeln für den magnetischen Kreis gelten gut, solange Streufeld klein bleibt, also d klein gegen ∅ Polflächen. Dann ist natürlich der magnetische Widerstand des Luftspaltes d R md = ---------µ0 A Da die Magnetisierungskurve meist nur als Diagram verfügbar ist, werden in der Praxis graphische Lösungen bevorzugt. Φm magn. Material Luft ges. Kreis VE ° VL V = Θ G - Weil φ m ⁄ A = B und H = V Eisen ⁄ l , kann man anstelle der üblichen Magnetisierungskurve des Eisens B = f ( H ) auch φ m = f ( V Eisen ) auftragen, wenn A und l gegeben sind (durchgezogene Kurve). - Für den Luftspalt kann man entsprechend statt der Geraden B = µ 0 H die Gerade φ m = V Luft ⁄ R md auftragen (gestrichelt) - Addiert man waagerecht für jedes φ m die zugehörigen magnetischen Spannungen V E für das Eisen und V L für die Luft, so erhält man für jedes φ m die notwendige magnetische Rand° spannung V und damit Θ (strich punktierte Kurve).