Kein Folientitel
Werbung

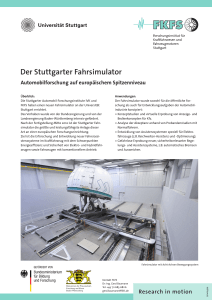
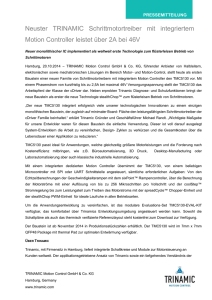
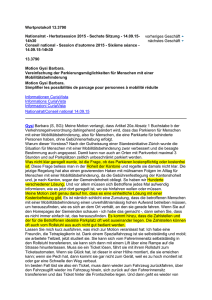
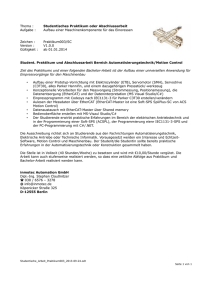
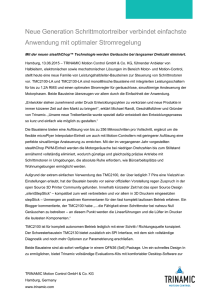
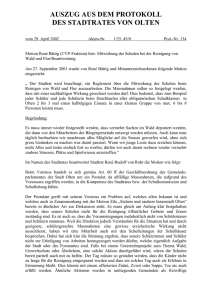
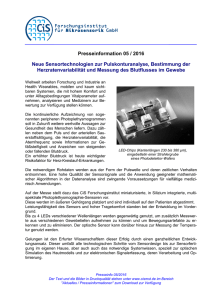
Der neue Fahrsimulator der Universität Stuttgart Präsentation zum ASIM Workshop Ulm, 4./5. März 2010 von Gerd Baumann (FKFS) Anne Piegsa (Universität Suttgart, IVK) Christoph Liedecke (Universität Suttgart, IVK) Forschungsinstitut für Kraftfahrwesen und Fahrzeugmotoren Stuttgart RESEARCH IN MOTION 1 Kurzfassung Die Universität Stuttgart baut in enger Kooperation mit dem FKFS zurzeit den größten Fahrsimulator an einer europäischen Forschungseinrichtung auf. Das Projekt wird vom Bundesministerium für Bildung und Forschung mit 3,8 Mio € gefördert. Die Anlage verfügt über eine Bewegungsplattform mit 6 + 2 Freiheitsgraden, die ebene Linearbewegungen von etwa 10m x 7m ermöglicht. Damit lassen sich Fahrzeugbewegungen realistischer nachbilden als mit den weit verbreiteten Hexapod-Simulatoren. Eine auf der Bewegungsplattform montierte Simulatorkuppel kann komplette PKW aufnehmen. Dadurch befindet sich der menschliche „Fahrer“ in einem realistischen Umfeld und bedient das Fahrzeug in gewohnter Weise. Ein Rundum-Grafiksystem dient zur räumlichen Visualisierung der Fahrzeugumgebung. Weiterhin ist ein hochwertiges Audio- und NVH-Simulationssystem vorgesehen. Der Simulator wird Ende 2010 für öffentliche und industrielle Forschungsaufgaben verfügbar sein. In dem Beitrag werden die Zielsetzungen und das technische Konzept des Stuttgarter Fahrsimulators beschrieben. Im Mittelpunkt steht die Erforschung des Fahrerverhaltens und die Entwicklung von Fahrerassistenzsystemen. Solche Systeme werden einerseits zur Unfallvermeidung bzw. zur Reduktion der Unfallschwere eingesetzt. Hochwertige Fahrsimulatoren ermöglichen deren Erprobung mit Normalfahrern ohne Gefahr für Leib und Leben der Probanden. Von zunehmender Bedeutung sind auch Assistenzsysteme, die den Fahrer in geeigneter Weise beeinflussen, um den Energieverbrauch z.B. durch nutzloses Beschleunigen und Abbremsen zu vermeiden. Der Umgang mit solchen Systemen und die Akzeptanz können im Fahrsimulator und reproduzierbaren Bedingungen (z.B. Verkehrsumfeld) mit Probanden bewertet werden. Anhand von Beispielen wird dargestellt, welche Typen von Fahrerassistenzsystemen untersucht werden können. Weiterhin wird die Integration von Realfahrzeugen in den Fahrsimulator sowie die Generierung von haptischen Rückmeldungen erläutert. Forschungsinstitut für Kraftfahrwesen und Fahrzeugmotoren Stuttgart RESEARCH IN MOTION 2 Das VALIDATE-Projekt • Zielsetzung: virtuelle Entwicklung von Assistenz- und Regelungssystemen im Kfz • Gefördert vom Bundesministerium für Bildung und Forschung (BMBF) Messfahrzeug: Streckenerfassung, Potenzialanalysen Fahrsimulator: Virtuelle Umgebung, realer Fahrer VALIDATE Simulation: neue Regelungs- oder Assistenzfunktionen Forschungsinstitut für Kraftfahrwesen und Fahrzeugmotoren Stuttgart Antriebsstrangprüfstand: Erprobung realer Komponenten RESEARCH IN MOTION 3 Zielsetzungen des Stuttgarter Fahrsimulators • • • • F&E- Werkzeug, für Industriepartner nutzbar Potenzialabschätzung von Fahrerassistenzsystemen und Nachweis der Wirksamkeit unter Berücksichtigung des Fahrerverhaltens Akzeptanzstudien und interaktive Erprobung virtueller und realer Komponenten (Software-Prototypen bis Serie); Fehlersuche Beispiele: ACC, Lenkfunktionen, Hybrid-Fahrstrategie, Collision Avoidance Technisches Konzept: • • • • • • Einbringen von Komplettfahrzeugen mit geringen Modifikationen Visualisierung der Umgebung und Geräuschsimulation Rekonstruktion der Beschleunigungen in allen Raumrichtungen soweit möglich Nachbildung eines „elektronischen Umfelds“ für die Fahrzeugelektronik (Emulation der CAN/LIN/Flexray-Netzwerke mittels HIL-Technologie) „Synthetische GPS-Satelliten“ zum Betrieb von Navigationsgeräten etc. Simulation von Umfeldsensorik (Radar, Videosysteme, Ultraschall) Forschungsinstitut für Kraftfahrwesen und Fahrzeugmotoren Stuttgart RESEARCH IN MOTION 4 Konstruktion des Fahrsimulators Technische Daten: • • • • Linearbewegung 10 x 7 m (2 DOF) Hexapod (6 DOF) Frequenzbereich bis 10 Hz Kombinierte Längs- und Querbeschleunigung bis ca. 0,6 g • Kuppeldurchmesser 5,6 m • 360 Grad Grafikprojektion Forschungsinstitut für Kraftfahrwesen und Fahrzeugmotoren Stuttgart RESEARCH IN MOTION 7 Anforderungen an Simulationsmodelle • Echtzeitfähigkeit: Einbindung des Menschen in die Simulation im „Closed-LoopBetrieb“ erfordert stets deterministisches Echtzeitverhalten • Kurze Zykluszeiten: Detaillierte Simulation von Reifen, Lenkung und Antrieb erfordert Zykluszeit ~ 1 ms wegen numerischer Stabilität sowie ruckfreier Haptik der Simulatorlenkung und des Bewegungssystems • Vollständigkeit: Das Simulationsmodell für einen Fahrsimulator muss alle Betriebszustände und Zustandsübergänge numerisch konsistent abdecken, z.B. Übergang stehendes Fahrzeug / Vorwärts / Rückwärtsfahrt, Fahrdynamik im Normalund Grenzbereich, ansonsten entstehen haptische Störung • Plausibilität: Das Verhalten eines Fahrsimulators muss für den „Fahrer stets nachvollziehbar sein, um Akzeptanz und aussagekräftige Ergebnisse zu erzielen. • Besondere Herausforderung: Rekonstruktion des Lenkrad-Rückstellmoments im Fahrsimulator. Forschungsinstitut für Kraftfahrwesen und Fahrzeugmotoren Stuttgart RESEARCH IN MOTION 8 Lenkkraft-Rekonstruktion im Fahrsimulator (2) Klassisches Verfahren: • Simulation des Lenkmoments über Reifenund Lenkungsmodell • Lenkradmoment-Rekonstruktion mittels rastmomentfreiem Servo-Direktantrieb Nachteil: • Fahrzeugspezifiches „Lenkgefühl“ (bestimmt durch Konstruktion der Servounterstützung, Reibung, Steifigkeit ...) schwierig nachzubilden Neuer Ansatz: • Elektrolenkung in allen zukünftigen Fahrzeugen • Lenkkraftrekonstruktion im Simulator durch Ansteuerung des internen Lenkmotors Vorteile: • realistisches „Lenkgefühl“ durch reale Lenkmechanik (Zahnstange, Lenksäule etc.) • geringer Umbauaufwand für Realfahrzeug LenkmomentSollwert Quelle: Heißing / Ersoy (Hrsg.): Fahrwerkhandbuch (Vieweg Verlag) Lenkwinkel-Istwert Forschungsinstitut für Kraftfahrwesen und Fahrzeugmotoren Stuttgart RESEARCH IN MOTION 10 Anwendungsbeispiel: Hybrid- Fahrstrategie • • • • Vorarbeiten: Entwurf, HIL-Betrieb und Grundabstimmung der Fahrstrategie für ein Erdgas-Hybridfahrzeug am statischen Fahrsimulator des FKFS Problem: präzise Verbrauchs- und Emissions- Modelle für den instationären Betrieb des Verbrennungsmotors und der Hybridkomponenten fehlen Ausweg: Integration des realen Hybridantriebs auf einem dynamischen Prüfstand in die Interaktive Simulation Damit Erhöhung der Entwicklungstiefe in der Simulation: Grundbedatung bezgl. Verbrauch und Komfort (Antriebsstrang-Schwingungen, Start/Stopp-Häufigkeit etc.) im Simulator möglich Forschungsinstitut für Kraftfahrwesen und Fahrzeugmotoren Stuttgart RESEARCH IN MOTION 11 Fahrereinfluss auf den Energieverbrauch: Beispiel: erhebliche Varianz der zurückgewonnenen Energiemenge bei einem Hybridfahrzeug im Schlepp- bzw. Bremsbetrieb Randbedingungen: 39 Fahrten mit unterschiedlichen Fahrern auf einer repräsentativen Fahrstrecke „StuttgartRundkurs“ Forschungsinstitut für Kraftfahrwesen und Fahrzeugmotoren Stuttgart RESEARCH IN MOTION 14 Ausblick: Reichweitenassistenz für Elektrofahrzeuge Reichweitenproblematik: • Begrenzte Reichweite durch hohe Gestehungskosten und geringe Energiedichte der Batterie; Ladezeiten von mehreren Stunden • Starke Abhängigkeit der im Realbetrieb erzielten Reichweite von der Umgebungstemperatur (temperaturabhängiger Energieinhalt der Batterie, Versorgung der Heizung und Klimaanlage aus der Batterie, Kühlleistungsbedarf für Batterie und E-Maschine) • Starke Abhängigkeit des Energiebedarfs von der Fahrweise (siehe Beispiel: gemessene Rekuperationsmenge für ein reales Hybridfahrzeug mit verschiedenen Fahrern auf einer repräsentativen Strecke) Ziele von Fahrsimulator-Untersuchungen: • Entwurf von Algorithmen für die Reichweitenprädiktion unter Berücksichtigung des individuellen Fahrstils • Entwicklung einer „Reichweitenassistenz“: Frühzeitige Optimierung des Energiemanagements im Fahrzeug, z.B. Begrenzung der Heiz- und Kühlleistung oder der Fahrleistungen, rechtzeitige Information des Fahrers, notfalls Routenführung zum „sicheren Hafen“ etc. Forschungsinstitut für Kraftfahrwesen und Fahrzeugmotoren Stuttgart RESEARCH IN MOTION 16 Zusammenfassung Der neue Stuttgarter Fahrsimulator ermöglicht Untersuchungen • • • zum Einfluss des Fahrers auf den Energiebedarf zur Wirksamkeit von Fahrerassistenzsystemen zum Entwurf von Fahrstrategien für Hybrid- und Elektrofahrzeuge Inbetriebnahme: • geplante Fertigstellung Ende 2010 Kontakt: • • • Dr. Gerd Baumann, FKFS, [email protected] Dr. Anne Piegsa, IVK, Universität Stuttgart, [email protected] Dipl.-Ing. Christoph Liedecke, IVK, Universität Stuttgart, [email protected] Forschungsinstitut für Kraftfahrwesen und Fahrzeugmotoren Stuttgart RESEARCH IN MOTION 18