DC-Servomotor mit Tachogenerator im Regelkreis
Werbung

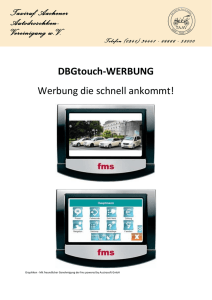
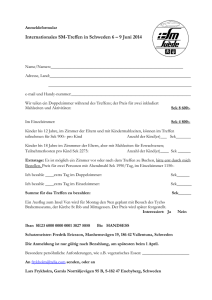
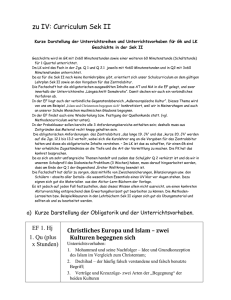
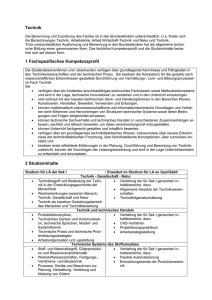
DC-Servomotor mit Tachogenerator DC-Servomotor mit Tachogenerator im Regelkreis Gegeben: DC-Servomotor mit Tachogenerator im Regelkreis Tacho filter circuit Leistungsverstärker vu = 2 + - UX(s) - + UU(s) C1b 100 kΩ 100 kΩ R2 100 kΩ C1a -Uref 100 kΩ - RW R1a R1b - + + -UW(s) -UE(s) = -UW(s) + UX(s) Auszug aus dem Datenblatt des Motors mit Tachogenerator: No load speed @ 24 V dc: 2300 rpm Mechanical time constant (T1): 20 ms Terminal Resistance (Ri): 7,8 Ω Rotor inductance (LA): 5,0 mH Tachogenerator voltage constant (ktg): 3,25 mV/rpm Tacho filter circuit (low pass filter): G(s) = 1/(1 + 2·10-3Sek.·s) Gesucht: 1) Geben Sie die Übertragungsfunktion Fs(s) in der Streckendarstellung an. Eingangsgröße: Eingangsspannung in den Leistungsverstärker Ausgangsgröße: Spannung nach Tachofilter Hinweis: Dieser Kleinmotor kann als stark gedämpftes PT2-Element mit der mechanischen Zeitkonstante als T1 und der Ankerzeitkonstante als T2 aufgefasst werden. Mit dem Tachofilter wird die Strecke zum PT3. 2) Berechnen Sie die Übertragungsfunktion FR(s) eines betragsoptimalen PIReglers. motortacho_rk_2.doc Seite 1/4 Vanek 2006.04.08 DC-Servomotor mit Tachogenerator 3) Dimensionieren Sie R1 und C1. Verwenden Sie Bauteile der Reihe E12 (10, 12, 15, 18, 22, 27, 33, 39, 47, 56, 68, 82, 100, ...). Stellen Sie R1 und C1 durch Serien- bzw. Parallelschaltungen dar. 4) Geben Sie die tatsächliche Übertragungsfunktion FR(s) des Reglers mit den von Ihnen gewählten Bauteilen in der Form FR ( s ) = k R 1 + 1 sTN an. 5) Bestimmen Sie den zeitlichen Verlauf der Spannung uX(t) bei einer sprunghaften Änderung von uW(t) (Sprungantwort). Verwenden Sie dazu ein Simulationsprogramm Ihrer Wahl. 6) Welchen Wert müssen Sie bei der Führungsgröße UW einstellen, um eine Drehzahl von 1000 U/min zu erhalten? motortacho_rk_2.doc Seite 2/4 Vanek 2006.04.08 DC-Servomotor mit Tachogenerator Lösung: 1) Übertragungsfunktion Fs(s): k = Ua / Ue = vu · (2300 min-1 · 3,25 mV/min-1) / 24 V = 2 · 7,48V / 24 V = 0,622 T1 = 0,02 Sek. (Mechanische Zeitkonstante) T2 = 2⋅10-3 Sek. (Tachofilter) T3 = LA / Ri = 5,0⋅10-3 H / 7,8 Ω = 6,41⋅10-4 Sek. (Ankerzeitkonstante) Fs ( s ) = k 0,622 = (1 + sT1 ) ⋅ (1 + sT2 ) ⋅ (1 + sT3 ) (1 + 0,02s ) ⋅ (1 + 2 ⋅ 10 −3 s ) ⋅ (1 + 6,41 ⋅ 10 −4 s ) 2) Übertragungsfunktion FR(s) Die angegebene Schaltung stellt einen PI – Regler dar. Aus dem Merkblatt erhalten wir: 1 + sT1 1 1 ⋅ = k R 1 + 2 k S TS s sTN TN 2 ⋅ 10 −2 mit TN = T1 = 0,02 Sek. , k R = = = 6,09 2k S TΣ 2 ⋅ 0,622 ⋅ 2,64 ⋅ 10 −3 TΣ = T2 + T3 = 2⋅10-3 Sek. + 6,41⋅10-4 Sek. = 2,64⋅10-3 Sek. FR ( s ) = 1 FR ( s ) = 6,09 ⋅ 1 + −2 2 ⋅ 10 s 3) Dimensionierung von R1 und C1 R2 + FR ( s ) = 1 sC1 R1 = R2 R 1 1 + = 2 ⋅ 1 + R1 sR1C1 R1 sR2 C1 Durch Koeffizientenvergleich erhalten wir: R2/R1 = kR = 6,09 ==> R1 = R2/6,09 = 100 kΩ/6,09 = 16,42 kΩ ≈ 15 kΩ + 1k5 = 16,5 kΩ R2C1 = TN = 2·10-2 Sek. ==> C1 = 2·10-2 Sek./ R2 = 2·10-2 Sek./105Ω = 2·10-7 F ≈ 180 nF + 18 nF = 198 nF R1a = 15k R1b = 1k5 R1 = 16,5 kΩ C1a = 180 nF C1b = 18 nF C1 = 198 nF 4) Tatsächliche Übertragungsfunktion FR(s) kR = R2/R1 = 100 kΩ / 16,5 kΩ = 6,06 motortacho_rk_2.doc Seite 3/4 Vanek 2006.04.08 DC-Servomotor mit Tachogenerator TN = (R2C1) = (100 kΩ·198 nF) = 1,98·10-2 Sek. 1 FR ( s ) = 6,06 ⋅ 1 + −2 1,98 ⋅ 10 s 5) Sprungantwort ANA, Zeit in Millisekunden: in ms 6) Führungsgröße für 1000 U/min Da ein Regler mit I-Anteil keine bleibende Regelabweichung besitzt, gilt für den stationären Zustand: uW(t → ∞) = uX(t → ∞) = ktg · 1000 U·min-1 = 0,00325 V/(U·min-1) · 1000 U·min-1 = 3,25V motortacho_rk_2.doc Seite 4/4 Vanek 2006.04.08