σ σ σ Formelsammlung – Dimensionieren II
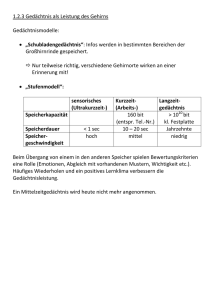
Werbung

Formelsammlung – Dimensionieren II
1
1.1
SCHWEISSEN
Allgemeiner Ablauf
1.Bauteile dimensionieren
2.äussere Bel. F, M auf Schnittkräfte der Schweissnaht reduzieren
3.Spannungskomponenten σxZug, σxBiegung, τxyQuer, τxyTorsion, bestimmen
4.Vergleichsspannung an verschiedenen Orten der Naht berechnen
5.Maximale Vergleichsspannung bestimmen
Festigkeitsnachweis:
mit v1, v2 Beiwerten:
V
zul
σF: in der Regel Festigkeitswert des Bauteils
v1: Festigkeitsminderung der Beanspruchungsart
v2: Festigkeitsminderung der Nahtqualität
σ ≤σ
1.2
1.5
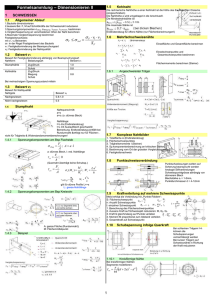
Kehlnaht
Die rechnerische Nahthöhe a einer Kehlnaht ist die Höhe des theoretischen Dreiecks
(eingeschrieben)
Die Nahthöhe a wird umgeklappt in die Anschlussfl.
Die Mindestnahtstärke ist
Die maximale Stärke ist
Endkraterabzug für offene Nähte (nur Flächenberechnungen!)
=
σ F ⋅ v1 ⋅ v2
1.6
Mehrfachschweissnähte
SF
Einzelfläche und Gesamtfläche berechnen
Einzelschwerpunkte und
Gesamtschwerpunkte bestimmen
Beiwert v1
Beiwert für Festigkeitsminderung abhängig von Beanspruchungsart
Nahtform
Belastungsart
Beiwert v1
Stumpfnähte
Kehlnähte
Zug/Druck
Schub
Zug/Druck
Biegung
Schub
1.0
0.8
Flächenmomente berechnen (Steiner)
1.6.1
Angeschweisster Träger
0.8
Bei mehrachsigem Spannungszustand mitteln
1.3
Beiwert v2
Beiwert für Nahtqualität
Nahtgüte
Beiwert v2
Nachgewiesen
0.8-1.0
Nicht nachgewiesen
0.5
1.4
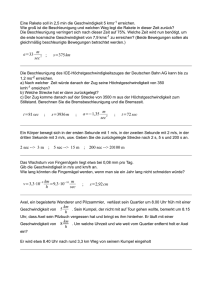
Stumpfnaht
Nahtquerschnitt:
a=s
a=s1 (s1 dünnes Blech)
Nahtlänge:
l=L-2a (Endkraterabzug)
l=L mit Auslaufblech geschweißt
Bemerkung: Endkraterabzug entfällt bei
Rundumnaht &erfolgt nur für Flächen-,
nicht für Trägheits-& Widerstandsmomentberechnungen!
1.4.1
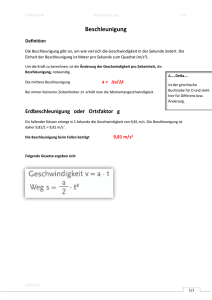
Spannungskomponenten am Bsp Flachstab
σ xZug =
Fx
; A = a ⋅l
A
a: dünnes Blech, l: red. Nahtlänge
τ zx =
Fz
A
τ yx =
A
Komplexe Nahtbilder
1. Totalfläche A (Endkraterabzug)
2. Flächenschwerpunktes
3. Trägheitsmomente I (Steiner)
4. Sp.komponentenberechnung an kritischen Stellen
5. Bestimmung vom Ort der grössten Vergleichsspannung
6. Festigkeitsnachweis
0
(Quernaht überträgt keine Schubsp.)
Fy
1.7
1.8
Punktschweissverbindung
Punktschweissungen sollten auf
Scherung beansprucht werden
Analogie Stiftverbindungen
Schweisspunktgrösse abhängig von
dünnerem Blech
Blechstärke s1 = 1-5mm,
Punktdurchmesser d = 4-12mm
L a2
σ x (M y ) =
; Wy =
Wy
6
My
gilt für dünne Profile L>>s
L: ganze Nahtlänge
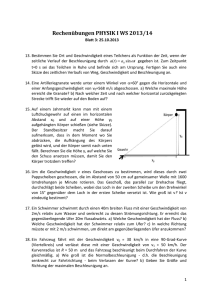
1.4.2
Spannungskomponenten am Bsp Kreisrohr
1.9
Kraftverteilung auf mehrere Schweisspunkte
Meist erfolgt die Verbindung mit „Punkte-Feldern“:
S: Flächenschwerpunkt
n: Anzahl Schweisspunkte
I: einzelner Schweisspunkt
1. Berechnung des Flächenschwerpunktes
2. Äussere Kraft auf Schweisspkt reduzieren: M, Qy, Qx
3. Kraft Q gleichmässig auf Punkte verteilen
4. Moment M proportional zum Abstand verteilen
5. Gesamtkraft auf Schweisspunkt
A: ganze Fläche (Rundumnaht);
M: Flächenmittelpunkt
1.4.3
1.10
Schubspannung infolge Querkraft
Bei schlanken Trägern l>h
können die
Schubspannungen
vernachlässigt werden
Bei kurzen Trägern auf
Schweissnähte in Richtung
der Kraft reduzieren
Beispiel
1.10.1
Kreisförmige Nähte
Bei kreisförmigen Nähten
Segmente modellieren:
I ax =
1
π
64
((d + 2a)
2
−d2
)
1.10.2
Verschweisste Profile
In verschweissten Profilen können, falls dσx/dx ≠ 0, auch Schubsp. auftreten:
3
KLEBEVERBINDUNG
3.1 Beanspruchung
- Genügend grosse Klebflächen
- Gleiche Tragfähigkeit von Bauteil und
Klebstelle wird angestrebt
- Klebeverbindung bevorzugt auf Scherung
beanspruchen
3.1.1
1.11
Berechnung der Spannungsamplituden σa, τa
Ermüdungsnachweis: σVa ≤ σVa zul, wobei:
Der zulässige Spannungsausschlag ist:
- σA ist die reine Ausschlagsfestigkeit (ungekerbte Probe) bei
gegebener Mittelspannung aus dem Smithdiagramm
- wobei v1 aus Tabellen entnommen werden kann (nicht v1 von ruhender Beanpruchung!)
und
3.1.2
- v2 identisch mit der ruhenden Beanspruchung ist
1.11.1
LÖTVERBINDUNGEN
Löten ist ein thermisches Verfahren zum stoffschlüssigen Fügen und Beschichten von
Werkstoffen
Einteilung dach der Liquidustemperatur des Lotes:
- Weichlöten: T < 450°C
- Hartlöten: T > 450°C
- Hochtemperaturlöten: T > 900°C (mit Vakuum oder Schutzgas)
Flussmittel: nichtmetallisch, um Oxide zu beseitigen und zu vermeiden
Bedingt lösbare Verbindung
2.1
Berechnung von Lötteilen
Grundsätlich soll
- im Bauteil und im Lot dieselbe Tragfähigkeit angestrebt werden
- das Lot auf Scherung belastet werden
Es werden 2 Beanspruchungsfälle unterschieden:
- Zug-/Druck-Beanspruchung Æ vermeiden
- Scherbeanspruchung Æ bevorzugen
Vorgehen:
1. Tragfähigkeit berechnen (Bauteil)
2. Lötstelle mit identischer Tragfähigkeit
3. Festigkeitsnachweis der Lötstelle
2.2
Die Klebefläche ist gleichmässig
beansprucht
Wegen tiefen Festigkeitswerten eher zu
vermeiden
Scherbeanspruchung bevorzugt!
Erhöhung von lü führt nicht zu
proportional höheren Belastungswerten!
Tabelle von v1
3.1.3
2
Zug-Druck-Beanspruchung
Rechnung bei wechselnder Beanspruchung
3.2
4
Schälbeanspruchung verhindern!
Dynamisch belastete Klebestellen
FEDERN (INA-Büechli S.210)
4.1
Auswahl
4.2
Federkennlinien
Zug-/Druck-Beanspruchung
1: progressiv
Durchschläge verhindern, Eigenfrequenz konstant halten
2: linear (R=F/s): Federwaage
3: degressiv: Kräfte limitieren (Puffer)
ω=
2.3
Scherbeanspruchung
2.4
Schubbeanspr. Bei Welle/Nabe-Verbundung
4.3
4.3.1
Gekoppelte Federn
Parallele Federn
für alle Federn Weg derselbe
Rn: Federkonstante, oft auch c
4.3.2
Serielle Federn
ν: wechselnd: ν=0.5, schwellend: ν=0.75
2.5
Zulässige Spannungen
Kraft in jeder Feder dieselbe
4.3.3
2
Kombination progressiv
R
m
4.3.4
Kombination degressiv
4.9.4
Spiralfeder
Drehmoment in
Windungsrichtung einleiten,
Enden einspannen,
Wickeldistanz genügend gross,
so dass keine Berührung
stattfindet
4.4
4.9.5
Torsionsbeanspruchte Feder
4.9.6
Zylindrische Schraubenfeder
Federarbeit
4.4.1
Arbeit einer Zugstabfeder (keine echte Feder!)
4.4.2
Arbeit eines Biegestabes (Blattfeder)
Vorteile:
-Lineare Kennlinie
-Praktisch keine Dämpfung
-Grosse Federwege bei begrenzter Bauhöhe möglich
-Günstiger Ausnutzungsfaktor (nA=0.5)
-Rechnerisch gut zu erfassen
Kräfte/Momente bei
zentrisch angreifender Kraft:
da α klein und Qurkräfte vernachlässigbar:
D
M T = F ⋅ → Torsionsfe der (imWS )
2
4.9.7
4.5
Schubspannungsverteilung
Ausnutzungsfaktor
Der Ausnutzungsfaktor charakterisiert das
Arbeitsvermögen in Bezug auf das eingesetzte
Werkstoffvolumen.
4.10
4.6
Wirkungsgrad/Dämpfungswert
4.7
Federvorspannung
Tellerfedern (gemischt beansprucht)
4.11 Gasfedern →
4.12 Dämpfer
4.8
Federschwingsystem
4.9
Dimensionierung
4.9.1
Dämpfer sind keine Federn!!!
4.13 Wekstoffe
Biegestabfeder
bessere Ausnutzung bei Dreiecksfedern
(geschichtete Blattfeder), aber Reibung!
Modellierung immer wie Biegestab
4.9.2
Schraubenbiegefeder
5
4.9.3
Welle-Nabe-Verbindung (INA-Büechli S. 201)
Funktion:
-Drehmoment übertragen
-Kraft axial/radial übertragen
Nabe:
Zahnrad, Riemenrad,
Hebel,…
Verbindung:
fest/beweglich,
lösbar/unlösbar
Entwurfsrichtlinien
bei eng gewundenen Federn ist
Sp. an der Innenseite grösser
als außen
nur Biegemoment einleiten
(Gestaltung)
Æ D/d ≈ 4-20
3
5.1.7
Kerbzahn-Verbindung; Zahnwellen-Verbindung
5.1.8
Polygonprofil
5.2
5.1
5.1.1
Formschlüssige Welle-Nabe-Verbindung
5.2.1
Reibschlüssige Verbindungen
Klemmvorrichtung
Passfeder-Verbindung
5.2.2
für kleine/mittlere Momente
einseitig, stossfreie Momente
Einfache (De)Montagefähigkeit, kleine Drehzahlen, Azimutal nicht einstellbar
Berechnung
5.1.1.1 Dimensionieren
(h-t1):
Traghöhe auf Nabenseite
ltr: tragende Länge:
ltr=l-2r für rundstirnige PF.,
ltr=l für rechteckige PF
i: Anzahl Passfedern
φ: Traganteil bei mehreren
Passfedern: φ=1 bei einer PF,
φ=0.75 bei 2
pzulN: zulässige Flächenpressung der Nabe pzulW: zulässige Flächenpressung der Welle
5.1.2
Betriebsfaktor cB
Mit Rutschsicherheit SR
Die maximale Pressung p ist durch die Festigkeit von Welle oder Nabe gegeben, vgl. auch
Druckbeanspruchung rot.symm. Körper
5.2.3
Klemmverbindung mit geteilter Nabe
zulässige Flächenpressung
mit SF: 1.3-2.5, SB: 3-4
5.1.3
Passfeder (getrennt behandeln)
Am infinitesimalen Element am Rand der Trennstelle
herrscht Flächenpressung 5.2.4
und Schubspannung
σ V = σ x2 + 3τ 2 = σ N2 + 3τ 2 < σ zul =
pzulP = Wert max Pressung PF
σF
SF
Länge der Passfeder < Länge der Nabe
Rückenspiel
Passung: Feder: h9, Nut: verschiebbar: D10 / fest: J9-P9
5.1.4
Klemmverbindung mit geschlitzter Nabe
5.2.5
Verteilter Kraftangriff
5.2.6
Axiale Klemmung
Toleranz-Rechnung
Feder: h9, Nut: D10
b = 10mm → 10h9 : 10 : Nennmass , h Lage desToleranzfe ldes,
9 : Höhe desTolranzfel des
Passfeder : DIN 6885
{−
Norm
5.1.5
Höhe
Länge
Scheibenfeder-Verbindung
pN =
5.1.6
A 10
{
{ × 8{ × 50
{
Form Breite
F
F
≤ p zul
pW =
≤ p zul
AN ⋅ i ⋅ ϕ
AW ⋅ i ⋅ ϕ
F
F
τ SF = =
A b ⋅ l ⋅ i ⋅ϕ
Keilwellen-Verbindung
übertragbares Moment über linke und rechte
Schulter mit Annahme µ überall identisch
5.2.7
wobei: L: Nabenlänge
i: Anzahl Keile (hier 4)
φ=0.75 für Innenzentrierung; φ=0.90 für Flankenzentrierung
4
Kegelsitzverbindung
Radiale Dehnungen/minimales übermaß (in Abhängigkeit von p berechnen):
radiale Verschiebung:
r
(siehe druckbeaufschlagte rot-symm. Körper)
χ= i
ra
für ESZ:
Randbedingungen:
Welle (Vollwelle: χW=1):
für rWa:
Nabe:
für rNi:
minimales Übermaß:
Spannungen:
Vergleichsspannung:
5.2.8
Welle:
maximale Vergleichsspannung bei rWi:
es muß gelten:
Spannelemente
bei Vollwelle:
Nabe:
maximale Vergleichsspannung bei rNi:
es muß gelten:
Bei sprödem Material muss Herleitung angepasst werden (Normalspannungshypothese)!
Maximales Übermaß:
-Je kleiner die Winkel,
desto weniger Kraft kann übertragen werden
-Mehr als 3 Elementpaare lohnen sich nicht
-Das übertragbare Moment berechnet sich aus der
Summe der Fni
5.2.9
Zylindrischer Pressverband
Fügetemperatur beim Schrumpfen:
5.3
Elemente zur axialen Lagesicherung
5.3.1
Formschlüssige Sicherung (kostengünstig, unsicher)
5.3.2
Reibschlüssige Sicherung
Längspressverband: Presssitz (mittels Presse gefügt)
Querpressverband: Schrumpfsitz (mit Temp.-Unterschied
gefügt)
Diese Kraft muss durch eine Reibkraft aufgebracht
werden; überhöht mit Rutschsicherheit SR
Æ minimaler Fugendruck
spielfrei,
große Kräfteübertragung
maximaler Fugendruck pmax:
In Welle und Nabe darf die zulässige Spannung nicht überschritten werden!
6
6.1
5.2.10
PNEUMATIK (INA-Büechli S. 236)
Zylinder
Zwei Rohre unter Innendruck
6.1.1
Zylindertypen
Einfach wirkendender Zylinder:
5.2.11
Das Übermaß U
das theoretische Übermass:
Glättung:
5
Doppeltwirkender Zylinder:
6.1.2
6.2
6.2.1
Symbole der Zylinder
6.3
Logik-Bauteile
6.3.1
Zweidruckventil UND-Funktion
6.3.2
Zweidruckventile ODER-Funktion
Ventile
3/2-Wegeventile
6.4
Planung
Weg-Schritt-Diagramm
Lageplan: Ablauf
Für einfachwirkende Zylinder:
6.2.2
4/2-Wege-Impulsventil
6.4.1
Signallinien
6.4.2
Eingabeelemente
6.4.3
Steuerdiagramm
6.4.4
Schaltplan
Zahlen gmäss Konvention
6.2.3
5/3-Wegeventil mit Rückstellfeder
6.2.4
Symbole für Ventile
6.2.5
Symbole für Betätigung
6.2.6
Anwendung einer
Schnellentlüftung →
6
6.4.5
1A
1V
1S
0Z
x1
Bauteilbezeichnung in Schaltplänen
2A
2V
2S
x2
Antriebselemente
Stellelemente (erste Zahl: Nr. des Antriebselementes)
Eingabeelemente
Energieversorgung
Zahl hinter Buchstaben: Nummerierung der Elemente falls mehrere pro
Antriebselement vorkommen
Elemente werden horizontal und in
Ruhestellung gezeichnet, Ventile, die
in Ausgangsstellung betätigt sind,
werden mit Nocken gezeichnet
7.5
Gestalten von Mechanismen
7.5.1
Beispiel: 4-gliedriges Schubgelenkgetriebe
Aufgabe:
Zyklisches, lineares und symmetrisches Bewegen von Pkt 1 nach 2 und zurück mit Distanz
smax mittels rotativ umlaufendem Antrieb
Lösung:
smax=(L3+L2) – (L3 – L2)=2L2 L2=smax/2
-L3 hat keinen Einfluss und kann noch frei
bestimmt werden (Gestaltungsraum!);
- ein kleineres L3 führt zu grösseren
Beschl. (=Kräfte); Regel: L3>3L2
Beschleunigungen:
Beispiel: →
Ablauf beim Zeichnen eines
Schaltplans:
-Antriebselemente zeichnen
(Zylinder…), oben
-Versorgungseinheit zeichnen, unten
-Stellelemente zeichnen (Ventile…),
unter Antriebselemente
-Verarbeitungselemente zeichnen
(Logikbauteile…), unter Stellelemente
-Eingabeelemente zeichnen (Ventile mit
Betätigung…), unter Verarbeitungselemente
Verbindungsleitungen zeichnen
Q: Quotient, Verhältnis zwischen
der Dauer des kürzeren und
derjenigen des längeren Weges
7.5.2
3-Lagen-Mechanismen
Beispiel: 3 sets von 2 Gelenkpunkten sind gegeben
und müssen angefahren werden:
1.
2.
3.
7.6
Grashof-Bedingung
S: Kürzester Hebel
L: Längster Hebel
P,Q: zwei andere Hebel
7
7.1
MECHANISMEN
erfüllt: einer der Drehhebel wird drehen (360°)
erfüllt und S ist Rahmenlänge L1: beide werden
drehen
nicht erfüllt: beide oszillieren nur mit Winkel
(<180°)
Terminologie
- Mechanismus-System (Getriebe, linkage): in einer Kette beweglich verbundene Glieder
für gewünschte Bewegung
- Mechanismus-Teil (Glied, link): einzelnes Bauteil (normalerweise solider Körper)
- Rahmen (Gestell, frame): Referenzbasis
- Gelenk (joint): Bewegliche Verbindungsstelle zwischen Gliedern
7.2
Kinematisches Modell
- Wirklichkeit, vielfach komplex und schwierig interpretierbar
7.7 Geschwindigkeiten
- Kinematische Modelle helfen die Wirklichkeit zu verstehen
Wie gross ist die Relativgeschwindigkeit des
Vorgehen:
Punktes B betrachtet von A?
- Nummerieren der links; Rahmen(Glieder) 1, andere 2, 3, ... (beginnen mit festen Körpern)
- Die Relativgeschwindigkeit eines
- Bezeichnen der Gelenke; A, B, C, ...
Punktes auf einem link steht senkrecht auf
- Bezeichnen der Interessenspunkte; X, Y, ...
der Verbindungslinie der beiden Punkte
Beispiel: Blechschere
- vB/A: Relativgeschwindigkeit
von Punkt B relativ zu A
bzw.: die beiden Punkte können relativ zueinander nur rotieren
7.7.1
Beispiel
Bekannt Rotationsgeschwindigkeit um A und
somit vB
7.3
Freiheitsgrad
Grübler‘s Beziehung (vereinfacht!):
- F (mobility; Freiheitsgrad, DOF)=3 (L – 1) – 2J
- Wobei: L Anzahl links (Anzahl Teile), J Anzahl Gelenke
DOF = 1: definierter Mechanismus, ein Aktuator genügt
DOF ≤ 0: blockierter Mechanismus
DOF >1: überdimensionierter Mechanismus;
(benötigt mehr als 1 Aktuator)
zusammenfallende
Gelenke werden
mehrfach gezählt:
7.4
7.4.1
Positionsanalyse
Beispiel graphisch
7.7.2
unnötige Gelenke:
Geschwindigkeit auf einem link
Bekannt sind zwei Geschwindigkeiten auf einem link.
Gesucht: Geschwindigkeit eines beliebigen Punktes auf diesem link
vC=vA+vC/A
vC=vB+vC/B
und somit vA+vC/A=vB + vC/B
Vorgehen:
- vF Æ projeziert auf FB Æ nach B verschieben
- vB senkrecht AC und Projektion auf BF gegeben
- vC prop. zu vB und BC
- Projektion auf CD Æ vE
7.7.3
Beispiel: Zylinder
Der Zylinder bewegt sich momentan mit 5mm/ sec vertikal zurück. Wie gross ist die
Momentangeschwindigkeit von E?
Lösungsweg:
Link 5 bewegt sich frei
Suchen der Geschw. von 2 Pkten
C und D auf link 5 um E zu bestimmen
vD=vC+vD/C
Mit den bekannten Geschwindigkeiten in C und D kann auf E geschlossen werden
vE = vD+vE/D vE = vC+vE/C und somit vD+vD/E = vC+vC/E
7
7.7.4
Stirnradgetriebe
schrägverzahnt
Zusammenfallende Gelenkpunkte
Zusammenfallende Gelenkpunkte müssen sorgfältig analysiert
werden
Beispiel Kipper:
- Das Bett dreht mit 5 rad/sec
- Bestimme Zylindergeschwindigkeit
Siehe: Gelenkpunkt B gehört gleichzeitig zu link 2, 4
- kennzeichne B2, B4
Wir formulieren:
vB2=vB4+vB2/B4 und vB2 ist bekannt vB2 = ω rB2
vB4 ist senkrecht zu link 4
Die Relativgeschwindigkeit vB2/B4 ist die gesuchte
Zylindergeschwindigkeit vB2/B4=vB2-vB4
7.8
parallele Wellen
für längeren Zahneingriff
höhere Geschwindigkeit
ruhiger
achsiale Kräfte
teure Lager
Kegelradgetriebe speziell
Beschleunigungen
Die Beschleunigung eines Punktes auf einem drehenden link ist die Ableitung des
Geschwindigkeitsvektors
Es kann
- der Betrag ändern: tangentiale Beschleunigung at
Oder
- die Richtung ändern: normale Beschl. an
oder
Die totale Beschleunigung ist die vektorielle Summe
analog zur Realtivgeschwindigkeit kann relativ formuliert werden
oder in Komponenten aufgeteilt
Normalkompenente in Richtung Zentrum
Azimutalkomponente senkrecht zu Verbindung
Um die Beschleunigung eines Punktes B auf einem link zu bestimmen, muss:
- Die Beschleunigung eines anderen Punktes A auf dem link
- Die Geschwindigkeit interessierten Punktes B
- Die Realtivgeschwindigkeit zwischen den beiden Punkten B/A bekannt sein
7.8.1
Stirnradgetriebe
doppelschrägverz.
Doppelschrägverzahnung
Ausgleich achsialer Kräfte
teuer in der Herstellung
Stirnradgetriebe
innenverzahnt
geradeverzahnt
paralelle Achsen
für kleine Achsdistanzen
Herstellung schwieriger
Lagerung schwieriger
gleiche Drehrichtung
Schneckengetriebe
90°
nicht parallele Achsen
identische Grösse
nicht schneidende Achsen
auch schrägverzahnt möglich grosse Übersetzungen
8.2
Bezeichnungen am Zahn
8.3
Verzahnungsgesetz
nur eine Antriebsrichtung
selbsthemmend
achsiale Kräfte
Beispiel: Paket-Pusher
Antrieb rotiert mit 120 rpm
Kinetik-Diagramm:
Bestimmung der Geschw Pkt B und C
ω2=120·2π/60=12.57rad/sec
vB=ω2·rAB=12.57 ·0.75=9.43 ft/sec
vC und vC/B aus dem
Geschwindigkeitsdiagramm
vC=12.9ft/sec vC/B=19.5ft/sec
Beschleunigungskomponenten:
Das Geschwindigkeitsverhältnis zwischen
den beiden Rädern muss konstant sein:
- konstante Geschwindigkeit des
angetriebenen Zahnrades
Die Geschwindigkeitskomponenten
senkrecht zu den Berührungstangenten
müssen identisch sein:
- permanenten Kontakt
7.8.2
Beispiel: Presse
Das kann durch das Verzahnungsgesetz
erreicht werden:
- jede Normale auf der Berührungstangente
eines Eingriffnktes zeigt durch den Wälzpkt C
Im Weiteren gilt:
-Im Wälzpunkt wälzen die Räder und
es findet kein Gleiten statt.
-In allen anderen Berührungspunkten, welche nicht auf dem
Wälzkreis liegen, liegt ein tangentiales Gleiten vor (ungleiche
Tangentialkomponenten): Reibarbeit = Verlust
-Die Eingriffslinie kann prinzipiell eine beliebige Form aufweisen;
wenn die Eingriffslinie festgelegt ist, dann ist auch die
Flankenform definiert.
-Eine spezielle Form der Eingriffslinie ist eine Gerade (Evolventenverzahnung)
-Auch eine spezielle Form stellen zwei zusammenhäng. Kreise dar (Zykloidenverzahnung)
Antrieb rotiert mit 72 rad / sec und beschleunigt mit 250 rad / sec2
Bestimmen Sie die Beschleunigung des Stempels!
Kinematik Diagramm
Geschwindigkeiten für A und B
vB=ω2 · rBC=72 ·1=9.43 in/sec
vA und vA/C aus Diagramm
vA=66.6 in/sec
vA/B=36.2 in/sec
Komponenten der Beschleunigung:
Beschleunigungsdiagramm:
8.4
8
8.1
Getriebetypen
Formschluss
Formschluss ohne Schlupf
höhere Momentübertragung
kleinere radiale Kräfte
(grösster Anteil geht in
azimutale Momenterzeugung)
8.1.1
Reibschluss
Reibschluss mit Schlupf (1–3%)
kleinere Mom.übertragung
kleinere radiale Kräfte
(nur rund 10% azimutale
Momentenerzeugung)
8.5
weitverbreitet
geradeverzahnt
parallele Wellen
Zahnstangengetriebe
Spezialfall r2 → ∞
für lineare Bewegung
Evolentenverzahnung
Die Eingriffslinie ist eine Gerade mit Winkel φ, die durch C geht und die Tangente an den
beiden Grundkreisen bildet.
-Die Flankenform ist durch die Evolvente definiert.
-Die Evolvente baut sich als Abwicklung eines Fadens auf
dem Grundkreis auf.
-Die Form ist nur zwischen Kopfkreis und Grundkreis definiert.
-Unterhalb Grundkreis möglichst grosse Rundung (Festigkeit, Kerbwirkung)!
Zahnradgetriebetypen
Stirnradgetriebe
Modul
Wichtige Kennzeichnung: Modul m=d /N[mm]
Viele der weiteren Masse werden auf das Modul bezogen
International standardisiert
Zwei Zahnräder im Eingriff müssen dasselbe Modul aufweisen
Achtung: in USA umgekehrt definiert, Diametral pitch Pd=N/d[1/ in] (grosse Zahl = kleiner
Zahn!). Standardisierung durch AGMA: American Gear Manufacturer’s Association
Getriebe
Kegelradgetriebe
nicht parallele Achsen
meist 90 °
auch schrägverzahnt möglich
auch bogenverzahnt möglich
8
8.5.1
Norm-Geometrien
8.6.2
Planetengetriebe
Freiheitsgrad DOF = 2 (2 Aktoren definieren Ausgang)
8.5.2
Eingriff zwischen Rädern
-Flankenspiel j: für Flankenspiel bzw. Schmierfilm wird Zahnbreite schmäler, Lücke breiter
gestaltet:
j= 0.05 + (0.025 ... 0.1)m
-Flankenspiel = Zahnspiel wird auch stark von Toleranz des Achsabstandes beeinflusst
-Für gleichgerichtet drehende Räder darf Spiel grösser sein
-Profilüberdeckung: mindestens 1 Zahn muss immer im Eingriff sein
- angestrebt wird: mp>1,2 bzw. >1,4–1,5 für robustere und weichere Übertragung; die
Anzahl der Eingriffszähne ist während der Drehung ungleich
8.5.3
-Um die unterschiedlichen Bewegungen zu bestimmen, wenden wir das Gesetz der
relativen Geschwindigkeiten an
-Der Arm (Planetrenträger) dient als Referenz
Minimale Zähnezahl
Trotz grosser Übersetzungen werden kleine Räder angestrebt.
Die minimale Überdeckung und die Gefahr
des Eindringens des Kopfes in die Flanke des
Gegenrades unterh Grundkreis (Unterschneidung)
ergibt maximale Grössenverhältnisse zwischen kleinerem und grösserem Rad
Lösungsmöglichkeiten bei Unterschneidung:
-Kürzung der Zahnhöhe (kleinere Eingriffslänge)
-Grössere Eingriffswinkel (grössere radiale Kräfte)
-Vergrösserung Achsabstand (Profilverschiebung)
Unterschneidung akzeptieren (Reduktion des Momentes)
8.5.4
Komplexe Getriebe
Festigkeit
-Gesamte Normalkraft setzt sich
aus azimutaler und radialer
Komponente zusammen
-Das Moment wird über die azimutale
Kraftkomponente übertragen
M=Ft · d / 2 und definiert wesentlich das Modul
-Kleinerer Eingriffswinkel
überträgt das Moment effektiver
-Bei Schrägverzahnung zusätzlich achsiale Kraft
8.5.5
8.6.3
Berechnungen
9
9.1.1
KURVENGETRIEBE
Bezeichnungen, Klassifikationen, Beispiele
-Zahn auf Biegung und Querkraft Funktionsprinzip: beliebige periodische Bewegungskurven mit präziser Synchronisation
und minimierten Kräften
beansprucht (Angriffspunkt
Beispiel: rot markierte Positionen müssen angefahren werden.
variiert, Eingriff variiert).
Dauerfestigkeit ist meist relevant Skizzieren Sie einen sinnvollen Bewegungsverlauf; wie verlaufen die Kräfte? Skizzieren
sie die Kurve!
(Kerbwirkung)
-Zahn auch auf Flächenpressung
-Kurvengetriebe
beansprucht (Grübchenbildung)
-Kurve, Kurvenscheibe
-Verschleiss durch Reibung
-Stössel, Hebel
-Bewegungsplan
Cam: Kurvenscheibe
Follower: Stössel
w = ω!
P = F ⋅v
Übersetzung:
Leistungsübertragung:
Moment: (2.M in kW und n in U/min)
Momentübersetzung:
Geometrie der Geradstirnräder mit Evolventenverzahnung:
Teilung:
Teilkreisdurchmesser:
Achsabstand:
Kopfhöhe:
Eingriffswinkel:
8.5.6
Beispiel
Eine Getriebestufe soll ausgewählt werden
- Motor P=1hp; 600 rpm
- Drehzahl Spindel 200 rpm
- Achsdistanz c=200mm
Achsabstand:
P=1HP=746W;
U=10U/s=62,8rad/s;
M=P/ω=12Nm
Tabelle Lieferant ergibt für Motorenritzel-Stirnrad
- d=100mm
Passendes Rad auf Spindelseite:
- m=1
- d=300mm
- M=14Nm
- m=1
8.6
Mehrstufengetriebe
Grosse Übersetzungsverhältnisse können nur mit mehrstufigen
Getrieben realisiert werden (ergäbe zu grosse Räder;
Empfehlung pro Stufe i<10)
Gesamtübersetzung
Vorsicht mit Vorzeichen der Drehrichtung!
8.6.1
Zwischenrad
Durch ein Zwischenrad kann die Drehrichtung gekehrt werden.
Kurven:
- Scheiben- oder Diskkurven
- Zylinderkurven
- Linearkurven
9.1.2
Verbindung:
- Formschluss (hohe
Herstellpräzision)
- Kraftschluss (notwendige
Rückstellmechanismen)
- Beispiel:
Kurvengetriebe Rietermaschine
Beispiel: Anheben eines Bauteils zwischen zwei Transportbändern
Verlangte Bewegung:
1. anheben 2 in. In 1.2 sec
2. verweilen 0.3 sec
3. absenken 1 in. In 0.9 sec
4. verweilen 0.6 sec
5. absenken 1 in. In 0.9 sec
Gesamtzykluszeit
T=1.2+0.3+0.9+0.6+0.9=3.9 sec
Drehgeschwindigkeit der Kurvenscheibe
ω=2π/3.9=1.61 rad/sec=0.256 rev/sec =15.38U/min (rev: Umdrehung)
9
Winkelbestimmung der Übergänge:
9.2.4
Zykloide Bewegung
- Basiert auf trigonometrischen Funktionen
- Weiche Beschleunigungsübergänge
- Geeignet für hohe Geschwindigkeiten
←Bewegungsdiagramm:
9.2
Bewegungsschemata
Die Kurvenform entscheidet über die Beschleunigung und damit über die Kräfte
- Für langsame Bewegungsabläufe ist dies unwesentlich und die Kurvengeometrie wird
durch möglichst einfach Produktion bestimmt
- Für schnelle Bewegungsabläufe ist die Kurvengeometrie massgeblich
- Die folgenden Bewegungsschemas werden hauptsächlich unterschieden
konstante Geschwindigkeit
konstante Beschleunigung
Harmonische Bewegung
Zykloid Bewegung
- Weitere Schemata existieren (Literatur)
- Beschleunigung: Kräfte
- Ableitung Beschleunigung: Stoss: Vibration, Lärm
Zur Definition der Bewegung definieren wir die folgenden Parameter im betrachteten!
Intervall
- H: gesamter Weg des Followers
- T: gesamte Zeit der Bewegung.
- t: Zeit
- (β): gesamter Winkel der Bewegung
- (φ): Winkel
- (ω): Drehgeschwindigkeit
- s: Weg des Followers in Funktion von t oder φ
- v: follower Geschwindigkeit
- a: follower Beschleunigung (relevant für Kräfte)
- j: Beschleunigungsänderung (relevant für Vibrationen)
9.2.1
9.3
Profilgestaltung
Definitionen:
- Grundkreis Rb (kleinster Kreis des Profils)
- Referenzpunkt auf Follower
- Offset, e
- Initial-Position (Scheibe und Follower in Grundposition)
- Primärkreis (Kreis mit Radius der Initialposition)
- Kurve der Scheibe
- Radius des Followers Rf
Kontaktwinkel:
- Die Kraft zwischen Kurve und Follower ist rechtwinklig
- Kontaktwinkel δ
- Winkel<30°, sonst:
- Vergrössern des Grundradius
- Reduktion des Offset
Lagerkräfte nur bei Offset vorhanden!
Limiten:
- Kurvenscheiben kennen geometrische Limiten für Follower-Bewegungen
- Erweiterung der Limiten durch Vergrösserung des Grundkreises
Analytische Kurvenauslegung:
Konstante Geschwindigkeit
- Einfachstes Bewegungsschema mit linearer Funktion
- Geschwindigkeitssprünge
- Unendliche Beschleunigungen (Kräfte) an den Stellen der
Geschwindigkeitsänderung
- Nur für langsame Bewegungen geeignet
9.4
Geneva-Mechanismus
Analytik:
s: Weg des Stössels in seiner Richtung
9.2.2
Konstante Beschleunigung
- quadratische Funktion
- Tiefst mögliche Beschleunigungswerte
- Abrupte Beschleunigungsänderungen führen zu Vibrationen
10
Kupplungen/Bremsen
10.1 Starr
zu übertragende Kräfe:
10.2 Nachgiebig
9.2.3
Harmonische Bewegung
- Basiert auf trigonometrischen Funktionen
- Weicher Beschleunigungsübergang zwischen
Beschleunigen und Abbremsen
- Abrupter Beschleunigungswechsel am Anfang und Ende
10.3 Kuppeln
Phase 0:
Motor im Leerlauf, Abtrieb ruht
Phase I, Rutschphase:
Abtrieb beschleunigt, Motor wird abgebremst
Phase II, Beschleunigung:
Gemeinsame Beschleunigung von Motor und Abtrieb
Phase III, Beharrung:
Motor und Abtrieb rotieren mit konstanter Drehzahl
10
10.4 Momente
10.12 Bandkupplungen und -bremsen
Beharrungsmoment: Last und Widerstände des Abtriebs,
abhängig von der Drehzahl des Abtriebs:
- Je nach Bauart mit oder ohne Servowirkung
- Servowirkung (falls gegeben) gehorcht dem Gesetz der
Seilreibung
Vorteile
- Sehr einfache Konstruktion
- Praktisch unbegrenzte Servowirkung möglich
Nachteile
- Grosse Querkräfte, welche die Welle belasten
Kupplungsmoment: Abhängig von der Anpresskraft, dem
Reibungskoeffizienten und vor allem von der Drehzahldifferenz:
Motormoment: abhängig von der Motordrehzahl (Drehmomentkennlinie):
10.13 Anforderungen an Reibpaarungen
10.5 Reibungsmoment
Anforderungen an die Reibpaarung
- Hohes µ, über weite Drehzahl- und Temperaturbereiche möglichst konstant
- Hohe mechanische Festigkeit
- Hohe Wärmebeständigkeit
- Hohe Verschleissfestigkeit, möglichst geringe Fressneigung
- Gute Wärmeleitfähigkeit
uniforme Verteilung der Anpresskraft:
σA =
FA
π ( RA2 − RI2 )
M Ki =
R A 2π
∫ ∫ Rµσ
RI 0
A
, mk ( R ) = Rµσ A infinitesimales Stück
(
2
dϕdR = πµσ A RA3 − RI3
3
)
Verhältnis zwischen Kupplungsmoment und einer einzelnen Reibpaarung
( zählen und multiplizieren ) :
M Ki =
2 R −R
FA
µ
3 R −R
3
A
2
A
3
I
2
I
10.6 Rutschphase
Momentengleichgewicht motorseitig
(.): in Abhängigkeit von!
System aus zwei gekoppelten
Differenzialgleichungen:
Momentengleichgew. Abtriebsseitig
10.14 Ölschmierung
Vorteile von ölgeschmierten Kupplungen
- Geringerer Verschleiss
- Auch an Stellen einsetzbar, wo aus anderen Gründen Öl nicht ausgeschlossen werden
kann (Getriebekupplungen)
- Bessere Wärmeabführung
Vorteile von trockenen Kupplungen
- Höheres m (Drehmoment), kleinere Anpresskräfte
- µ ist konstanter
- µHAFT nur unwesentlich grösser als µGLEIT (manchmal sogar gleich oder gar geringer)
Lösung : hom ogene und partikulärevomTyp
ω A = ωV
MR
M HV
M
− HW t ⎞
⎛
⎜1 − e ωV ⋅I A ⎟
⎜
⎟
⎝
⎠
10.7 Beschleunigung
Motor und Abtrieb beschleunigen gemeinsam
Momentengleichgewicht aller rotierenden Teile
Einzelne Differenzialgleichung
Beschleunigungsphase:
( I A + I M ) ω& = M M − M H
wobei ωM = ω A = ω
10.8 Bremsen
Bremsen sind schaltbare Kupplungen, bei denen eine Seite blockiert ist.
Bremsen lassen sich wie schaltbare Kupplungen einteilen
Beim Bremsvorgang existiert nur die Rutschphase,
die Beschleunigungsphase entfällt natürlich.
Momentengleichgewicht der rotierenden Teile
Einzelne Diff.glg!
10.9 Trommelkupplungen und -bremsen
- Ungeschmiert
- Mit oder ohne Servowirkung
(beim Bremsen selbst verstärkt)
Vorteile
- Gute Wärmeabführung
- Kompaktbauweise
Nachteile
- Bei häufiger Betätigung Nachlassen der Bremswirkung
durch Aufheizen möglich („Fading“)
10.10 Kegelkupplungen und -bremsen
- Mit oder ohne Ölschmierung möglich
- Keine Servowirkung
- Häufig Doppelkegelkupplungen zur Aufhebung der Axialkraft
Vorteile
- Kleine Baugrösse bei grosser Belagsfläche
- Gute Wärmeabführung
- Grosse Anpresskraft bei kleiner Schaltkraft
Nachteile
- Grosses Verschleissvolumen
- Grosse Schaltwege
10.11 Scheibenkupplungen und -bremsen
- Keine Servowirkung
- Mit oder ohne Ölschmierung
- Scheibenkupplung hat max. zwei Reibscheiben,
sonst Lamellenkupplung
Vorteile
- Lamellenbauart mit Ölschmierung baut sehr klein
- Sehr gute Selbstkühlung von Scheibenbremsen
Nachteile
- Leerlaufmoment grösser 0 bei Lamellenkupplungen
11