8 Mechanische Schwingungen
Werbung

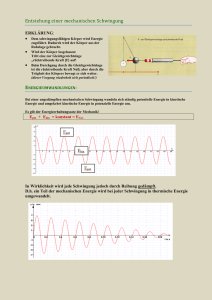
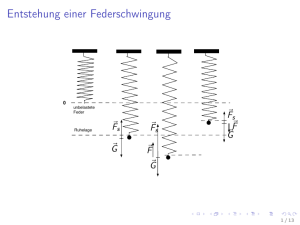
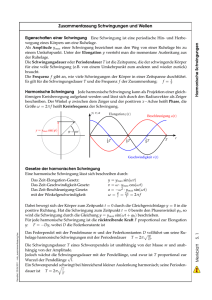
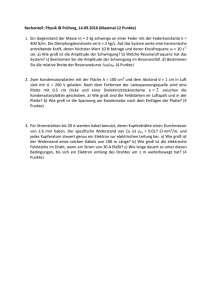
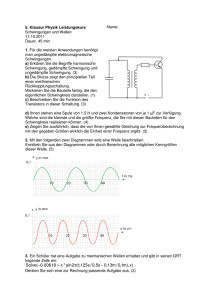
8 Mechanische Schwingungen Beispiele vorstellen: Federpendel, Fadenpendel, Wassersäule im U-Rohr, Kugel in Rinne, Maxwell-Rad, Stimmgabel u.s.w 8.1 Grundbegriffe für Schwingungen: Ruhelage: ist der Punkt der Bahn, in dem der Körper nach hinreichend langer Zeit bei schwacher Dämpfung ruhen würde Umkehrpunkt: ist ein Punkt der Bahn, in dem die Geschwindigkeit ihre Richtung umkehrt Periodendauer T: gibt die Zeit für eine volle Hin- und Herbewegung (Periode) einer Schwingung an. (bzw.: T = nt mit: t-gesamte Zeit für n Perioden) [T]=1s Frequenz f: gibt die Anzahl der Schwingungen pro Sekunde an (bzw.: f = nt ) [f ] = 1s = 1Hz es gilt: f= 1 T Elongation (momentane Auslenkung) y: gibt den Weg an, um den sich der schwingende Massenpunkt aus der Ruhelage entfernt hat. Sie ist eine zeitabhängige Größe: y = y(t) [ y] = 1m Amplitude ymax oder ŷ : gibt die größte Elongation an, also die Entfernung zwischen Ruhelage und Umkehrpunkt. (wichtig: Sie wird immer positiv angegeben.) Kreisfrequenz ω: ω = 2π ⋅ f (ω bezieht sich auf die zugehörige Kreisbewegung) Dämpfung: Eine Schwingung mit konstanter Amplitude heißt ungedämpft. Nimmt die Amplitude mit der Zeit ab, so heißt die Schwingung gedämpft. (schwache Dämpfung beim Fadenpendel, starke Dämpfung beim U-Rohr) 1 8.2 Die harmonische Schwingung Zur Vereinfachung wird zunächst von Reibung abgesehen. Der schwingende Körper wird als Massenpunkt betrachtet. Experiment: Vergleich der Schattenprojektion einer Kreisbewegung mit dem Schatten eines Federpendels Mit dem regulierbaren Motor kann die Winkelgeschwindigkeit der Scheibe und damit auch des kleinen Zylinders so eingestellt werden, dass sich die Schatten des Zylinders und des schwingenden Körpers synchron bewegen. ⇒ Für beide Schatten gilt die gleiche Zeit-OrtFunktion. mathematische Beschreibung: y* y t3 t3 t4 t2 ymax t2 t4 ϕ t5 y t1 x* t1t5 t1 t2 t3 t4 t5 t6 t7 t8 t9 t10 t t6 t6 t7 t7 Kreisbewegung Wir erkennen: -ymax Schatten Zeit-Ort-Funktion y( t ) = y max ⋅ sin(ϕ( t )) ϕ (t) ist der Phasenwinkel (oder auch die Phase) einer Schwingung zu einem bestimmten Zeitpunkt t. Er gibt den Winkel im Bogenmaß an, den der Radiusvektor in der zugehörigen Kreisbewegung mit der positiven x*-Achse einschließt. Für ϕ (t) gilt allgemein: ⇒ allgemein gilt: ϕ( t ) = ω ⋅ t + ϕ0 , ϕ0 ist dabei der Phasenwinkel zur Zeit t = 0s y( t ) = y max ⋅ sin(ω ⋅ t + ϕ0 ) Zeit-Ort-Funktion Die Zeit-Geschwindigkeits-Funktion und die Zeit-Beschleunigungs-Funktion lassen sich nun mit Hilfe der Differenzialrechnung schnell bestimmen. 2 r Kurzer Rückblick zur geradlinigen Bewegung mit konstanter Beschleunigung a in x-Richtung: ∆x d = x ( t ) = x& ( t ) ∆t → 0 ∆t dt Momentangeschwindigkeit v(t): v( t ) = lim mit x ( t ) = 12 at 2 + v 0 t + x 0 Momentanbeschleunigung a(t): ⇒ ∆v d = v( t ) = v& ( t ) ∆t → 0 ∆t dt a ( t ) = lim mit v( t ) = at + v0 ⇒ v( t ) = at + v0 (= &x&( t )) a ( t ) = a = kons tan t oder mit Hilfe der Integration von a = kons tan t zu v(t) und von v(t) zu x(t) Zeit-Geschwindigkeits-Funktion: v( t ) = y& ( t ) = ⇒ d bedeutet, dass die dt nachfolgende Funktion nach der Zeit t abgeleitet werden muss) d d y( t ) = ( y max ⋅ sin(ωt + ϕ0 )) dt dt (Hinweis: v( t ) = y max ⋅ ω ⋅ cos(ωt + ϕ0 ) mit v max = y max ⋅ ω , denn cos(ωt + ϕ0 ) wird max imal 1 Zeit-Beschleunigungs-Funktion: a ( t ) = v& ( t ) = ⇒ d d v( t ) = ( y max ⋅ ω ⋅ cos(ωt + ϕ0 )) dt dt a ( t ) = − y max ⋅ ω2 ⋅ sin(ωt + ϕ0 ) mit a max = y max ⋅ ω2 Zusammenfassung der Bewegungsgleichungen: y( t ) = y max ⋅ sin(ωt + ϕ0 ) v( t ) = y max ⋅ ω ⋅ cos(ωt + ϕ0 ) a ( t ) = − y max ⋅ ω2 ⋅ sin(ωt + ϕ0 ) Definition: Eine lineare Schwingung, für die gilt: y( t ) = y max ⋅ sin(ωt + ϕ0 ) , bezeichnet man als harmonische Schwingung. Eine solche Schwingung stimmt mit der Projektion einer Kreisbewegung überein. Aufgabe: Drücken Sie a(t) mit Hilfe von y(t) aus. Weitere Aufgaben zu den Bewegungsgleichungen 3 8.2.1 Das lineare Kraftgesetz Wir suchen eine Bedingung, mit deren Hilfe sich die harmonische Schwingung theoretisch r nachweisen lässt. Dazu betrachten wir die Ursache der Bewegung – die resultierende Kraft F . r r Nach dem Grundgesetz der Mechanik gilt: F( t ) = m ⋅ a ( t ) Betrachten wir eine lineare Schwingung, reicht es, die zugehörige Koordinate zu betrachten. ⇒ F( t ) = m ⋅ a ( t ) mit a ( t ) = − y max ⋅ ω2 ⋅ sin(ωt + ϕ0 ) ⇒ F( t ) = − m ⋅ y max ⋅ ω2 ⋅ sin(ωt + ϕ0 ) mit y max ⋅ sin(ωt + ϕ0 ) = y( t ) ⇒ F( t ) = − m ⋅ ω2 ⋅ y( t ) ⇒ Da m und ω während der harmonischen Schwingung konstant sind, fasst man diese zusammen: m ⋅ ω2 = D = kons tan t . D nennt man Richtgröße der harmonischen Schwingung. F( t ) = −D ⋅ y( t ) mit D = konstant Diesen Zusammenhang bezeichnet man als lineares Kraftgesetz. Es besagt, dass bei einer harmonischen Schwingung die resultierende Kraft direkt proportional zur Elongation aber immer entgegengerichtet ist. Man kann auch sagen, dass die resultierende Kraft bei einer harmonischen Schwingung den Körper immer zur Ruhelage hin beschleunigt. Aus diesem Grund nennt man hier die resultierende Kraft auch Rückstellkraft oder rücktreibende Kraft. F( t ) = − D ⋅ y( t ) mit F( t ) = m ⋅ a ( t ) ⇒ m ⋅ a ( t ) = − D ⋅ y( t ) mit a ( t ) = &y&( t ) ⇒ m ⋅ &y&( t ) = −D ⋅ y( t ) Hinweis auf Differenzialgleichung möglich: ⇒ &y&( t ) + D m ⋅ y( t ) = 0 Die letzte Gleichung ist die so genannte Differenzialgleichung der linearen harmonischen Schwingung. Ihre Lösung erfordert spezielle Verfahren der Analysis und liefert die Bewegungsgleichungen. Aus den Überlegungen des linearen Kraftgesetzes zur Richtgröße kann man eine Formel für die Periodendauer der harmonischen Schwingung schlussfolgern: m ⋅ ω2 = D ⇒ ω = ⇒ T = 2π ⋅ D m mit ω = 2π T ⇒ 2π = T D m m D 4 Zusammenfassung: Eine harmonische Schwingung lässt sich auf zwei Arten festlegen: 1. eine lineare Schwingung, die mit der Projektion einer Kreisbewegung übereinstimmt. Für eine solche Schwingung gilt die Bewegungsgleichung y( t ) = y max ⋅ sin(ωt + ϕ0 ) . (nur praktisch möglich) 2. eine lineare periodische Bewegung, die durch die resultierende Kraftkoordinate F hervorgerufen wird, für die ein lineares Kraftgesetz der Form F = −D ⋅ y gilt, wobei D konstant sein muss. 8.2.2 Beispiele harmonischer Schwingungen a) Schraubenfeder, Gummiseil Gegeben: - die Masse der Feder bzw. des Gummis ist vernachlässigbar klein - Feder/Gummi wird nur im Elastizitätsbereich betrieben (also in dem Bereich, in dem das Hooksche Gesetz gilt) und nur auf Zug belastet - D* sei die Federhärte ) Experiment zeigen ) Video schwingender Körper ) Video schwingender Körper mit resultierender Kraft Serienbild aus Video schwingender Körper mit resultierender Kraft: Die Schüler erhalten folgende Kopie : y y0 unbelastete Feder FR FR 0 Ruhelage FR FR 5 Bei verschiedenen Federstellungen der Schwingung ist die resultierende Kraft eingetragen. Auftrag: Zeichnen Sie in Partnerarbeit an den Körper jeder Federstellung die Teilkräfte ein, die r die Rückstellkraft FR hervorrufen. r r r Lösung: Rückstellkraft FR , Gewichtskraft FG , Federkraft FF y y0 unbelastete Feder FF FF FF 0 FF FR Ruhelage FR FG FR FG FG FF FR FG FG Nachweis der harmonischen Schwingung unter Benutzung der Koordinaten: r r r Hinweis: Es handelt sich um eine lineare Bewegung in y-Richtung. Für die Koordinaten der Kräfte FR , FG und FF in y-Richtung müsste man nun schreiben FR y , FG y und FFy . Da diese Kräfte aber nur eine y-Komponente besitzen, wird auf den Index „y“ verzichtet. r r r Schwingt die Oberkante des Pendelkörpers durch die Ruhelage, dann gilt: FF + FG = 0 Folglich gilt für die Koordinaten: FF + FG = 0 ⇒ D * ⋅y0 + m ⋅ g = 0 . (beachte: g = −9,81 m ) s² Allgemein gilt für die Rückstellkraft: Folglich gilt für die Koordinaten: r r r FR = FF + FG FR = FF + FG FR = D * ⋅( y0 − y) + m ⋅ g FR = D * ⋅y 0 − D * ⋅y + m ⋅ g mit Gleichgewichtsbedingung D * ⋅y 0 + m ⋅ g = 0 FR = −D * ⋅y Da D* konstant ist, gilt D = D * ⇒ FR = − D ⋅ y ⇒ Es gilt ein lineares Kraftgesetz, also liegt eine harmonische Schwingung vor. 6 Nachweis der harmonischen Schwingung unter Benutzung der Beträge: r r r Schwingt die Oberkante des Pendelkörpers durch die Ruhelage, dann gilt: FF + FG = 0 r r r r Folglich gilt für die Beträge: | FF |=| FG | ⇒ D * ⋅ | y0 |= m⋅ | g | . (Gleichgewichtsbedingung) r r r FR = FF + FG Allgemein gilt für die Rückstellkraft: Folglich sind für die Beträge zwei Fälle zu unterscheiden: r r 1. Die Oberkante des Pendelkörpers befindet sich in oder über der Ruhelage ( | FF |≤| FG | ): r r r | FR |=| FG | − | FF | r r r r | FR |= m⋅ | g | −D * ⋅(| y 0 | − | y |) r r r r r r | FR |= m⋅ | g | −D * ⋅ | y 0 | + D * ⋅ | y | mit Gleichgewichtsbedingung D * ⋅ | y 0 |= m⋅ | g | r r | FR |= D * ⋅ | y | r r 2. Die Oberkante des Pendelkörpers befindet sich unter der Ruhelage ( | FF |>| FG | ): r r r | FR |=| FF | − | FG | r r r r | FR |= D * ⋅(| y 0 | + | y |) − m⋅ | g | r r r r r r | FR |= D * ⋅ | y 0 | + D * ⋅ | y | − m⋅ | g | mit Gleichgewichtsbedingung D * ⋅ | y 0 |= m⋅ | g | r r | FR |= D * ⋅ | y | r r In beiden Fällen sind FR und y immer entgegengesetzt orientiert. Demnach gilt für die Koordinaten: FR = − D * ⋅y . Da D* konstant ist, gilt D = D * ⇒ FR = − D ⋅ y ⇒ Es gilt ein lineares Kraftgesetz, also liegt eine harmonische Schwingung vor. Für die Periodendauer gilt damit: D = D * ⇒ T = 2π ⋅ m D* r | ∆F | Experimentelle Überprüfung: statische Bestimmung von D* D* = r = ... | ∆s | Trechnerisch = 2π ⋅ m = ... D* Texp erimentell = ... 7 Kombination von Schraubenfedern: a) Zwei Federn mit den Federhärten D1 und D2 werden vertikal hintereinander gehängt. Welche Federhärte Dges besitzt dieses System? D1 D2 D1 Dges y2 y1 D2 50g 50g FG FG yges= y1+ y2 50g F G r r r Die gleiche Kraft FG dehnt die Feder 1 um y1 , die Feder 2 um y 2 und das Federsystem um r r r r r yges . Dabei gilt: FG1 = FG 2 = Fges = FG = konstant r r r r | y ges | = y1 + y 2 | : | FG | r r r r | yges | y1 y2 r r = r + r mit | F |= D⋅ | y | | FG | | FG | | FG | ⇒ 1 1 1 = + D ges D1 D 2 D1 = D 2 ⇒ D ges = Spezialfall: b) Zwei Federn mit den Federhärten D1 und D2 werden parallel (ineinander) aufgehängt. Welche Federhärte Dges besitzt dieses System? D1 D2 D1 y0 y0 F1 D2 Dges y0 F2 Fges = F2+ F1 r r Um die Feder 1 um y0 zu dehnen ist die Kraft F1 notwendig. Bei der Feder 2 benötigt man r dazu die Kraft F2 . Beim parallel geschalteten Federsystem erhält man die gleiche Dehnung r r r mit der Kraft Fges = F1 + F2 . r r r also: y1 = y 2 = y 0 = konstant r r r r | Fges | = | F1 | + | F2 | | : y 0 r r r r | Fges | | F1 | | F2 | |F| = r + r mit D = r r y0 y0 y0 y ⇒ D ges = D1 + D 2 Spezialfall: D1 = D 2 ⇒ D ges = 8 b) Wagen zwischen zwei gespannten Federn Gegeben: - die Massen der Federn sind vernachlässigbar klein - die Feder wird nur im Elastizitätsbereich betrieben (also in dem Bereich, in dem das Hooksche Gesetz gilt) und nur auf Zug belastet - die Federhärte beider Federn sei D* ) Experiment zeigen ) Video ) Video mit resultierender Kraft Die Schüler erhalten folgende Kopie : D1=D* s0 s0 D2=D* s 0 s 0 FR s 0 FR 0 s Bei verschiedenen Elongationen der Schwingung ist die resultierende Kraft eingetragen. Auftrag: Zeichnen Sie in Partnerarbeit in die unteren drei Bilder jeweils alle auf den Wagen r wirkenden Teilkräfte ein, so dass sich die Rückstellkraft FR ergibt. 9 r r r Lösung: Rückstellkraft FR , Gewichtskraft FG , Kraft durch die Unterlage FU , Federkraft nach r r links Fli und Federkraft nach rechts Fre D1=D* s0 s0 D2=D* s 0 FU Fre Fli FG s 0 FU Fli FR Fre FG s 0 FR Fli FU Fre FG 0 Nachweis der harmonischen Schwingung unter Benutzung der Koordinaten: s r r Hinweis: Es handelt sich um eine lineare Bewegung in s-Richtung. Für die Koordinaten der Kräfte FR , Fli und r Fre in s-Richtung wird folgende Schreibweise gewählt: FR , Fli und Fre . Die Gewichtskraft und die r Gegenkraft der Unterlage heben sich immer auf. Sie haben keinen Einfluss auf FR . Es gilt s ≤ s0 . r r r FR = Fli + Fre Allgemein gilt für die Rückstellkraft: Folglich gilt für die Koordinaten: FR = Fli + Fre FR = −D * ⋅(s 0 + s) + D * ⋅(s 0 − s) FR = −D * ⋅s 0 − D * ⋅s + D * ⋅s 0 − D * ⋅s FR = −2 ⋅ D * ⋅s Da D* konstant ist, gilt D = 2D * ⇒ FR = − D ⋅ s ⇒ Es gilt ein lineares Kraftgesetz, also liegt eine harmonische Schwingung vor. 10 Nachweis der harmonischen Schwingung unter Benutzung der Beträge: r r r Allgemein gilt für die Rückstellkraft: FR = Fli + Fre Folglich sind für die Beträge zwei Fälle zu unterscheiden: r r 1. Für die Zeigerstellung gilt s ≥0 ( | Fli |≥| Fre | ): r r r | FR |=| Fli | − | Fre | r r r r r | FR |= D * ⋅(| s0 | + | s |) − D * ⋅(| s0 | − | s |) r r r r r | FR |= D * ⋅(| s0 | + | s | − | s0 | + | s |) r r r | FR |= D * ⋅(| s | + | s |) r r | FR |= 2D * ⋅ | s | r r 2. Für die Zeigerstellung gilt s < 0 ( | Fre |>| Fli | ): r r r | FR |=| Fre | − | Fli | r r r r r | FR |= D * ⋅(| s0 | + | s |) − D * ⋅(| s0 | − | s |) r r r r r | FR |= D * ⋅(| s0 | + | s | − | s0 | + | s |) r r | FR |= 2D * ⋅ | s | r r In beiden Fällen sind FR und s immer entgegengesetzt orientiert. Demnach gilt für die Koordinaten: FR = −2D * ⋅s . Da D* konstant ist, gilt D = 2D * ⇒ FR = − D ⋅ s ⇒ Es gilt ein lineares Kraftgesetz, also liegt eine harmonische Schwingung vor. Für die Periodendauer gilt damit: D = 2D * ⇒ T = 2π ⋅ m 2D * r | ∆F | Experimentelle Überprüfung: statische Bestimmung von D* D* = r = ... | ∆s | Trechnerisch = 2π ⋅ m = ... 2D * Texp erimentell = ... 11 c) Fadenpendel Gegeben: - die Masse des Fadens ist gegenüber der Masse des angehängten Körpers vernachlässigbar - der Körper wird als Massenpunkt betrachtet (mathematisches Pendel) - die Länge vom Aufhängepunkt bis zum Massenpunkt ist l ) Experiment zeigen ) Video Fadenpendel mit kleinem Auslenkwinkel und resultierender Kraft Die Schüler erhalten folgende Kopie : 1. Körper befindet sich im Umkehrpunkt l 2. Körper schwingt durch die Ruhelage α S -smax S -smax smax 0 smax v FG 3. Körper wird für s < smax vereinfachend als ruhend angenommen (statischer Fall) 0 4. Der Bewegungszustand des Körpers wird für s < smax berücksichtigt (dynamischer Fall) α α S -smax smax S -smax 0 smax 0 v r Der Körper wird bei verschiedenen Elongationen betrachtet. FG sei die Gewichtskraft des r Pendelkörpers, v die Momentangeschwindigkeit. Auftrag: Zeichnen Sie in Partnerarbeit in die ersten drei Bilder jeweils alle auf den Pendelkörper r wirkenden Teilkräfte ein, so dass sich die Rückstellkraft FR ergibt. Zum vierten Bild: ) Video mit großem Auslenkwinkel und resultierender Kraft Gemeinsam wird der Kräfteplan für das vierte Bild erstellt. 12 r r r r Lösung: Gewichtskraft FG , Fadenkraft FF , Rückstellkraft FR , Zentripetalkraft FZ , resultierende r Kraft Fres 1. Körper befindet sich im Umkehrpunkt l α FF FF S -smax FG 2. Körper schwingt durch die Ruhelage FR FZ -smax smax 0 S smax 0 v FG 3. Körper wird für s < smax vereinfachend als ruhend angenommen (statischer Fall) 4. Der Bewegungszustand des Körpers wird für s < smax berücksichtigt (dynamischer Fall) α α FF smax -smax 0 FR FF S Fres FZ -smax 0 FG S smax v FG Feststellung: Die resultierende Kraft ist unter Beachtung der Zentripetalkraft nicht tangential zur sAchse. Dieser Effekt ist um so größer, je größer der zu smax gehörende Winkel αmax gewählt wird. (Vergleich der Videos mit resultierender Kraft für α max = 10° und α max = 60° ). ⇒ Für kleine Auslenkwinkel kann die s-Komponente der resultierenden Kraft, also die Rückstellkraft, in guter Näherung aus dem Kräfteplan des statischen Falls ermittelt werden. Hinweis: Betrachtet man den Fall: αmax = 8,00° = 0,140rad und l = 1,00m ⇒ in der Ruhelage gilt: Der Betrag der Zentripetalkraft ist kleiner als 2% des Betrages der Gewichtskraft. ⇒ für α = 4,00° = 0,070rad gilt: Der Betrag der Zentripetalkraft ist kleiner als 1,5% des Betrages der Gewichtskraft. Die Auswirkungen auf die s-Komponente der resultierenden Kraft sind im Verhältnis zur tangential wirkenden Rückstellkraft noch geringer. 13 Nachweis der harmonischen Schwingung unter Benutzung der Koordinaten: Aus dem Kräfteplan (1. oder 3.) ergibt sich: r r r | FR |=| FG | ⋅ sin α = m⋅ | g | ⋅ | sin α | r r Die Rückstellkraft FR und die Elongation s sind entgegengesetzt. Gesteht man dem Winkel α die r selbe Orientierung wie s zu, so gilt: r FR = − m⋅ | g | ⋅ sin α mit α = s (α im Bogenmaß) l r s FR = − m⋅ | g | ⋅ sin( ) l Man erkennt, dass hierbei zunächst noch kein lineares Kraftgesetz gilt. Genau genommen handelt es sich beim Fadenpendel also nicht um eine harmonische Schwingung. Für kleine Auslenkwinkel α kann man jedoch auf die Kleinwinkelnäherung zurückgreifen: s s π = 10° ist der Fehler hierbei kleiner als sin α ≈ α ⇒ sin( ) ≈ Für α = 18 ˆ l l 0,51%. r r s m⋅ | g | ⇒ FR = −m⋅ | g | ⋅ = − ⋅s l l r r m⋅ | g | ⇒ FR = −D ⋅ s Da m, | g | und l konstant sind, gilt D = l ⇒ Es gilt ein lineares Kraftgesetz, also liegt für kleine Winkel eine (näherungsweise) harmonische Schwingung vor. Nachweis der harmonischen Schwingung unter Benutzung der Beträge: Aus dem Kräfteplanr(1. oder r 3.) ergibt sich:r | FR |=| FG | ⋅ | sin α |= m⋅ | g | ⋅ | sin α | r r s | FR |= m⋅ | g | ⋅ | sin α | mit α = (α im Bogenmaß) l r r s | FR |= m⋅ | g | ⋅ | sin( ) | l Man erkennt, dass hierbei zunächst noch kein lineares Kraftgesetz gilt. Genau genommen handelt es sich beim Fadenpendel also nicht um eine harmonische Schwingung. Für kleine Auslenkwinkel α kann man jedoch auf die Kleinwinkelnäherung zurückgreifen: s s π = 10° ist der Fehler hierbei kleiner sin α ≈ α ⇒ sin( ) ≈ Für α = 18 ˆ l l als 0,51%. r r r r | s | m⋅ | g | r ⇒ | FR |= m⋅ | g | ⋅ |= ⋅| s | l l r r r m⋅ | g | FR und s sind immer entgegengesetzt orientiert, also gilt für die Koordinaten: FR = − ⋅s . l r r m⋅ | g | Da m, | g | und l konstant sind, gilt D = ⇒ FR = −D ⋅ s l ⇒ Es gilt ein lineares Kraftgesetz, folglich liegt für kleine Winkel eine (näherungsweise) harmonische Schwingung vor. 14 r m⋅ | g | Für die Periodendauer gilt damit: D = l ⇒ T = 2π ⋅ m l = 2π ⋅ r D |g| l = ... Experimentelle Überprüfung: Trechnerisch = 2π ⋅ l r = ... |g| Texp erimentell = ... d) schwingende Flüssigkeitssäule im U-Rohr Gegeben: - U-Rohr mit konstanter Querschnittsfläche A = π ⋅ r 2 - homogene Flüssigkeit der Dichte ρ - Flüssigkeitssäule der Länge l - „-ymax“ muss über dem gekrümmten Bereich des U-Rohres liegen ) Experiment zeigen Nachweis der harmonischen Schwingung unter Benutzung der Koordinaten: Die rechte Oberkante der schwingenden Flüssigkeitssäule zeigt die jeweilige Elongation y an. Skizze: y r ymax mü 0 -ymax m r FR ( t ) = − | g | ⋅m ü ( t ) r ⇒ FR = − | g | ⋅ρ ⋅ π ⋅ r 2 ⋅ 2 y m – gesamte Masse der Flüssigkeit mü – Masse der überstehenden Flüssigkeit Die für die Schwingung verantwortliche Rückstellkraft ist hierbei die Gewichtskraft der r überstehenden Flüssigkeit FGü . Befindet sich diese im rechten Schenkel, so wirkt r FGü entgegen der y-Achse, befindet sich diese im r linken Schenkel, so wirkt FGü in Richtung der yAchse. Die Masse mü wird dadurch zu einer vorzeichenbehafteten Größe, die sich zeitlich ändert. Die überstehende Flüssigkeit hat das Volumen Vü und die Höhe 2y. Beide Größen sind ebenfalls vorzeichenbehaftet und zeitlich abhängig. mit m ü ( t ) = ρ ⋅ Vü ( t ) = ρ ⋅ π ⋅ r 2 ⋅ 2 y( t ) r r Da | g | , ρ und r konstant sind, gilt D = 2π⋅ | g | ⋅ρ ⋅ r 2 ⇒ FR = −D ⋅ y ⇒ Es gilt ein lineares Kraftgesetz, also liegt eine harmonische Schwingung vor. 15 Nachweis der harmonischen Schwingung unter Benutzung der Beträge: Die rechte Oberkante der schwingenden Flüssigkeitssäule zeigt die jeweilige Elongation y an. Skizze: r m – gesamte Masse der Flüssigkeit mü – Masse der überstehenden Flüssigkeit y ymax mü 0 -ymax m Die für die Schwingung verantwortliche r Rückstellkraft ist hierbei die Gewichtskraft FGü der überstehenden Flüssigkeit. Befindet sich diese im rechten Schenkel, so wirkt r FGü entgegen der y-Achse, befindet sich diese im r linken Schenkel, so wirkt FGü in Richtung der yAchse. Die Masse mü wird dadurch zu einer vorzeichenbehafteten Größe, die sich zeitlich ändert. Die überstehende Flüssigkeit hat das Volumen Vü und die Höhe 2y. Beide Größen sind ebenfalls vorzeichenbehaftet und zeitlich abhängig. r r r | FR ( t ) |=| g | ⋅ | m ü ( t ) | mit | m ü ( t ) |= ρ⋅ | Vü ( t ) |= ρ ⋅ π ⋅ r 2 ⋅ 2 | y( t ) | r r r ⇒ | FR |=| g | ⋅ρ ⋅ π ⋅ r 2 ⋅ 2 | y | r r r FR und y sind immer entgegengesetzt orientiert. Es gilt für die Koordinaten: FR = − | g | ⋅ρ ⋅ π ⋅ r 2 ⋅ 2 y . r r Da | g | , ρ und r konstant sind, gilt D = 2π⋅ | g | ⋅ρ ⋅ r 2 ⇒ FR = −D ⋅ y ⇒ Es gilt ein lineares Kraftgesetz, also liegt eine harmonische Schwingung vor. r Bestimmung der Periodendauer: D = 2π⋅ | g | ⋅ρ ⋅ r 2 und T = 2π ⋅ m D m ist hierbei die gesamte schwingende Masse: m = ρ ⋅ V = ρ ⋅ π ⋅ r 2 ⋅ l m ρ ⋅ π ⋅ r2 ⋅ l l ⇒ T = 2π ⋅ = 2π ⋅ = 2π ⋅ r r 2 D 2|g| 2π⋅ | g | ⋅ρ ⋅ r Experimentelle Überprüfung: l = ... Trechnerisch = 2π ⋅ l r = ... 2|g| Texp erimentell = ... 16