Skript herunterladen
Werbung

Elektrodynamik
Elektrodynamik Zusammenfassung
Marius Priebe und Christian Köhler
Inhaltsverzeichnis
1 Mathematischer Rahmen
1.1 Ableitungen . . . . . . . . . . . . . . . . . . . . . . . . . .
1.1.1 Gradient (Steigung) . . . . . . . . . . . . . . . . .
1.1.2 Rotation (Wirbelstärke) . . . . . . . . . . . . . . .
1.1.3 Divergenz (Quellstärke) . . . . . . . . . . . . . . .
1.1.4 Richtungsableitung (Steigung in einer Richtung)
1.1.5 Laplace-Operator (Potentialfeldquellstärke) . .
1.2 Produktregeln . . . . . . . . . . . . . . . . . . . . . . . . .
1.2.1 Aufstellen einer Produktregel . . . . . . . . . . . .
1.2.2 Formelsammlung . . . . . . . . . . . . . . . . . . .
1.3 Integralsätze . . . . . . . . . . . . . . . . . . . . . . . . . .
1.3.1 Formelsammlung . . . . . . . . . . . . . . . . . . .
1.3.2 Beziehungen zwischen den Operatoren . . . . .
1.3.3 Partielle Integration . . . . . . . . . . . . . . . . .
1.4 Delta-Distribution . . . . . . . . . . . . . . . . . . . . . . .
1.4.1 Definition . . . . . . . . . . . . . . . . . . . . . . . .
1.4.2 Ein wichtiges Beispiel . . . . . . . . . . . . . . . . .
1.4.3 Green’sche Funktion . . . . . . . . . . . . . . . . .
1.5 Sonstiges . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.5.1 Flächenberechnung . . . . . . . . . . . . . . . . .
1.5.2 Parametrisierung . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
3
. 3
. 3
. 4
. 5
. 5
. 5
. 6
. 6
. 6
. 7
. 7
. 7
. 8
. 8
. 8
. 8
. 9
. 9
. 9
. 10
2 Transporttheorie
11
2.1 Stromdichte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.2 Kontinuitätsgleichung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
3 Statik
3.1 Einfache Quellen . . . . . . . . . . . . . . . . . . . . . . . . .
3.2 Quellenverteilungen . . . . . . . . . . . . . . . . . . . . . . .
3.2.1 Potentiale . . . . . . . . . . . . . . . . . . . . . . . . .
3.2.2 Felder kontinuierlicher Quellverteilungen . . . . . . .
3.3 Sätze über den Rand . . . . . . . . . . . . . . . . . . . . . .
3.4 Kräfte auf Ladungen im Feld . . . . . . . . . . . . . . . . . .
3.4.1 Ladung im elektrischen Feld . . . . . . . . . . . . . .
3.4.2 Bewegte Ladung in der magnetischen Flussdichte .
3.5 Dipole . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.5.1 Elektrische Dipole . . . . . . . . . . . . . . . . . . . . .
3.5.2 Magnetische Dipole . . . . . . . . . . . . . . . . . . .
3.6 Felder in Materie . . . . . . . . . . . . . . . . . . . . . . . . .
3.6.1 Ausrichtung von Dipolen . . . . . . . . . . . . . . . .
3.6.2 Umdefinition für externe Quellen . . . . . . . . . . .
2
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
12
12
13
13
13
13
14
14
14
14
14
15
16
16
17
4 Dynamik
4.1 Induktion . . . . . . . . . . . . . . . . . . . . . .
4.2 Potential in zeitabhängigen Situationen . . .
4.3 Maxwell’sche Korrektur . . . . . . . . . . . . .
4.4 Maxwell Gleichungen . . . . . . . . . . . . . .
4.5 Einfache Bauteile . . . . . . . . . . . . . . . . .
4.5.1 Kondensator . . . . . . . . . . . . . . . .
4.5.2 Spule . . . . . . . . . . . . . . . . . . . .
4.6 Energieerhaltung . . . . . . . . . . . . . . . . .
4.7 elektromagnetische Wellen . . . . . . . . . . .
4.7.1 Betrachtung der Felder ohne Quellen
4.7.2 Kugelwellen . . . . . . . . . . . . . . . .
4.7.3 inhomogene Wellengleichung . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
18
18
18
18
19
19
19
20
20
21
21
22
22
5 Anwendungen
5.1 Elektrischer Widerstand . . . . . . . . .
5.2 Wechselstromkreise . . . . . . . . . . . .
5.3 Induktion zwischen zwei Leiterschleifen
5.4 Wechselspannung am Transformator .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
23
23
23
24
24
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
1 Mathematischer Rahmen
1.1 Ableitungen
Für die Definiton mehrdimensionaler Ableitungen verwendet man den Nabla-Operator
∂
~ :=
∇
∂x
∂
∂y
∂
∂z
Damit kann man unter Verwendung von Skalar- und Kreuzprodukt die in der Elektrodynamik
benötigten Rechnungen bequem aufschreiben.1
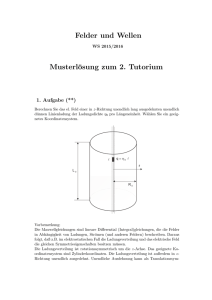
1.1.1 Gradient (Steigung)
Ist f (~r) eine skalare Funktion, so ist
~ f := ∇f
~ =
grad
∂f
∂x
∂f
∂y
∂f
∂z
der Gradient von f . Er hat u.A. diese beiden Eigenschaften:
~ ist orthogonal zu den Höhenlinien von f , das sind Kur• ∇f
ven ~r(t) mit f (~r(t)) = const. für jeden Wert von t, denn
d
~ ) · ~r˙ (t).2
f (~r(t)) = (∇f
0 = dt
~ zeigt in Richtung des größten Anstiegs von Abbildung 1: Darstellung einer Bei• Der Vektor ∇f
f . Um dies einzusehen, schauen wir uns an, wie sich f am spielfunktion mit Pfeilen als Gradiend
~
ten
Ort
~s in Richtung ~e ändert: dt f (~s + t · ~e)|t=0 = (∇f ) · ~e =
~ ~
∇f · cos(∠(∇f ; ~e)) Dieser Wert ist, wenn ~e in Richtung des
1 Achtung: Man kann mit dem ∇
~ rechnen wie mit herkömmlichen Vektoren, muss jedoch beachten, auf welchen Vektor
er sich bezieht und nach welchen Variablen er die Ableitung bezeichnet.
2 Damit ist ∇f
~ auch orthogonal zu den Äquipotentialflächen von f . Diese sind durch die gleiche Eigenschaft wie die
Höhenlinien ~
r (t) defniniert, nur halt als Flächen. Der Grund ist, dass jede Kurve innerhalb einer solchen Fläche eine
Höhenlinie ist.
3
Gradienten zeigt, (a) am größten (b) der Betrag des Gradienten.
Einige Bemerkungen:
~ einen Index mit
• Um anzudeuten, nach welcher Variablen abgeleitet wird, kann man dem ∇
~ ~r f |~r=~s , um die
dem entsprechenden Vektor geben, z.B. hätten wir gerade schreiben können ∇
Stelle, an der die Ableitung genommen wird, mit zu notieren.
• Bei beiden Rechnungen wurde die Kettenregel ausgenutzt. Diese ist im mehrdimensionalen i.A.
jedoch nicht kommutativ, d.h. von links gesehen kommt erst die äußere und dann die innere
Ableitung.
• Der Gradient ist ein Spezialfall der Jacobi-Matrix der ersten Ableitungen und muss, wenn man in
komplizierteren Fällen das Matrizenkalkül verwenden will, als Zeilenvektor geschrieben werden.3
∂f
~
· dx + ∂f
r , auf, so erhalten
∂y · dy + ∂z · dz = (∇f ) · d~
~
wir zum einen die lineare mehrdimensionale Taylor-Näherung f (~r) ≈ f (~r0 )+(∇f |~r=~r0 )·(~r −~r0 ), zum
anderen zeigt die Form des totalen Differentials (lauter Summanden aus jeweils zwei Faktoren,
das sieht sehr nach Matrizenmultiplikation aus) die oben bereits erwähnte mehrdimensionale
Kettenregel.4
• Schreibt man das totale Differential von f , df =
1.1.2
∂f
∂x
Rotation (Wirbelstärke)
~ × ~a =
~ ~a := ∇
rot
bezeichnet die Rotation von ~a.
∂az
∂y
∂ax
∂z
∂ay
∂x
−
−
−
∂ay
∂z
∂az
∂x
∂ax
∂y
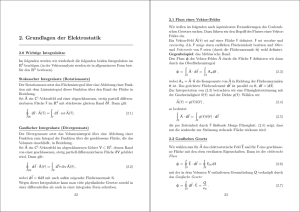
• Ihre anschauliche Bedeutung ist die Wirbelstärke von ~a, denn
jede Komponente misst grob gesagt die Differenz zwischen den
Differenzen der in den zur jeweiligen Richtung senkrecht liegenden Randstrecken verlaufenden Anteile des Vektorfelds.
(Dies werden wir mit dem Begriff von einer Zirkulation konkretisieren.)
Abbildung 2: Darstellung eines Vektorfelds mit um den Nullpunkt kon• Nimmt der zu einer Richtung orthogonale Anteil genauso stark
zentrierter Rotation (Man sieht hier
zu wie der zur orthogonalen Richtung orthogonale Anteil, so
die rechte Hand-Regel: Der Dauverschwindet die zugehörige Komponente.
men zeigt in Richtung der Rotation,
• Stimmt dies für alle Richtungen, dann verschwindet die Rotati- die anderen Finger in Richtung des
Vektorfelds.)
on insgesamt und man nennt ~a wirbelfrei.
~ × (∇f
~ ) ≡ ~0, d.h. Gradientenfelder sind wirbelfrei.5
• Es gilt stets ∇
Der Satz von Stokes hilft der Anschauung indirekt weiter.
3 Denn
f ist eine Funktion R3 → R
Einzelheiten führen hier jedoch zu weit.
5 Diese und die gleich folgende analoge Aussage für Wirbelfelder kann man einfach nachrechnen. Wir werden später noch
eine anschauliche Erklärung besprechen.
4 Die
4
1.1.3 Divergenz (Quellstärke)
Für das Vektorfeld ~a bezeichnen wir mit
~ · ~a = ∂ax + ∂ay + ∂az
div ~a := ∇
∂x
∂y
∂z
die Divergenz von ~a.
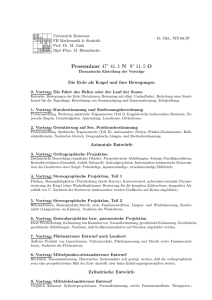
• Sie hat anschaulich die Bedeutung der Quellstärke von ~a,
denn jeder Term misst grob gesagt die Differenz zwischen
den durch die zur jeweiligen Richtung senkrecht liegenden Randflächen tretenden Anteilen des Vektorfelds.
(Dies werden wir mit dem Begriff vom einem Fluß konkretisieren.)
• Geht auf der einen Seite genau so viel herein wie auf Abbildung 3: Darstellung eines Vekder anderen Seite heraus, so verschwindet der zugehörige torfels mit Divergenz (Diese ist dort
positiv, wo die Pfeile auseinanderTerm.
laufen, und negativ, wo sie zusam• Stimmt die Bilanz in der Summe über alle Richtungen, menlaufen. In den beiden anderen
dann verschwindet die Divergenz insgesamt und man Quadranten verschwindet sie.)
nennt f quellenfrei.6
~ · (∇
~ ×~a) ≡ 0, d.h. Wirbelfelder sind quellenfrei.
• Es gilt stets ∇
Der Satz von Gauß hilft der Anschauung indirekt weiter.
Man beachte, dass wir freundlicherweise von einem der beiden zuletzt eingeführten Begriffe zum
anderen kommen, indem wir · gegen × und die geometrischen Begriffe, sowie Fluß gegen Zirkulation7
austauschen. Ähnliche Schönheiten durchziehen auch den physikalischen Teil.
1.1.4 Richtungsableitung (Steigung in einer Richtung)
Wir nennen
~
~ ) = ex · ∂f + ey · ∂f + ez · ∂f
(~e · ∇)f
= ~e · (∇f
∂x
∂y
∂z
Die Richtungsableitung von f in Richtung von ~e. Ihre Bedeutung haben wir bereits bei der Einführung
des Gradienten erörtert.
• Bei der Anwendung auf Vektorfelder ist die Richtungsableitung komponentenweise auszuführen.
• Damit entspricht sie der Multiplikation der Jacobi-Matrix mit dem Vektor, in dessen Richtung
abgeleitet wird.
1.1.5 Laplace-Operator (Potentialfeldquellstärke)
In dem Ausdruck
~ f =∇
~ · ∇f
~ =
∆f := div grad
∂2f
∂2f
∂2f
+ 2 + 2
2
∂x
∂y
∂z
~ ·∇
~ den Laplace-Operator, einen sog. elliptischen Differentialoperator.
bezeichnen wir mit ∆ = ∇
• Seine Bedeutung ist8 analog zur zweiten Ableitung im eindimensionalen Fall aufzufassen. Dies
sieht man ein, indem man die Begriffe Gradient und Divergenz nacheinander anwendet:
Zunächst gibt der Gradient die Steigung an und die Divergenz des Gradienten also wie stark
die Steigung nach außen zunimmt. Um den Bezug zum eindimensionalen Fall herzustellen: Haben wir z.B. ein lokales Maximum von f , so zeigt der Gradient lokal auf dieses zu (also nach
innen), d.h. die Quellstärke des Gradienten, also der Wert des Laplaceoperators, angewendet
auf f , ist negativ.
6 Man
beachte die völlig analoge Anschauung zur Rotation.
Gauß gegen Stokes)
8 mal abgesehen davon, dass er die Divergenz des Gradienten angibt
7 (und
5
• Auf ein Vektorfeld wird der Laplace-Operator komponentenweise angewendet, so dass Konsistenz mit der Rechenregel für das doppelte Kreuzprodukt herrscht:
~ ∇
~ · ~a) − ∇
~ × (∇
~ × ~a)
∆~a = ∇(
1.2 Produktregeln
1.2.1
Aufstellen einer Produktregel
Analog zum eindimensionalen Fall gilt stets
×
~ b) = ∇(
~ ×
~
a b) + ∇(a
∇(a
b)
~ und der Klammer, sowie zwischen a und b irgend eine der behandelten
• Dabei kann zwischen ∇
Arten von Multiplikation stehen (d.h. Skalarmultiplikation, Skalarprodukt oder Vektorprodukt). a
und b können entsprechend Skalar- oder Vektorfelder sein. Das Kreuzchen bezeichnet dabei
~ bezieht.
denjenigen Faktor, auf den sich ∇
• Die Aufgabe besteht nun darin, die entstehenden Ausdrücke so umzuformen, dass hinter dem
~ nur noch das mit dem Kreuzchen markierte Feld steht. Auf diese Weise hat man das Ergebnis
∇
auf eine Form gebracht, in der nur noch die bekannten Arten der Ableitung auftauchen.
1.2.2
Formelsammlung
Mit der oben genannten Vorgehensweise und z.T. der Regel für das doppelte Kreuzprodukt9 ergeben
sich für die Skalarfelder f und g und die Vektorfelder a und b die Produktregeln:
~ g) =
∇(f
~ · (f~a) =
∇
~ × (f~a) =
∇
~ · (~a × ~b) =
∇
~ )g + f (∇g)
~
(∇f
~ ) · ~a + f (∇
~ · ~a)
(∇f
~ ) × ~a + f (∇
~ × ~a)
(∇f
~ × ~a) · ~b − ~a · (∇
~ × ~b)
(∇
~ × (~a × ~b) = (~b · ∇)~
~ a − (∇
~ · ~a)~b − (~a · ∇)
~ ~b + (∇
~ · ~b)~a
∇
~ a · ~b) = ~b × (∇
~ × ~a) + (~b · ∇)~
~ a + ~a × (∇
~ × ~b) + (~a · ∇)
~ ~b
∇(~
(1)
(2)
(3)
(4)
(5)
(6)
Dabei wurde bei den ersten drei Formeln lediglich die Bilinearität des Produktes, bei der vierten Formel die Zyklizität des Spatproduktes und bei den letzten beiden die Regel für das doppelte Kreuzprodukt verwendet.
9 (zu
erkennen daran, dass vier Terme auftauchen)
6
1.3 Integralsätze
Genau wie im eindimensionalen Fall der Hauptsatz ermöglichen es im mehrdimensionalen verschiedene Integralsätze statt der Integration einer Ableitung über ein Gebiet nur das Vektorfeld
selbst auf dem Rand zu betrachten. Dabei sei im Folgenden stets V ein Volumen, das von der
Oberfläche A berandet wird10 bzw. A eine Fläche, die von der Randkurve C berandet wird.11
1.3.1 Formelsammlung
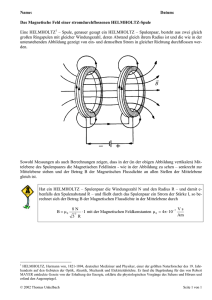
• Satz von Stokes
Z
A
~ · (∇
~ × ~a) =
dA
I
C
d~x · ~a
Den Ausdruck auf der rechten Seite nennt man die Zirkulation des Vektorfeldes ~a entlang der Kurve C. Der Satz
beschreibt also wie diese durch die Wirbelstärke von ~a im
Inneren von C zustande kommt.12
• Satz von Gauß
Z
V
~ · ~a =
dV ∇
I
A
~ · ~a
dA
Den Ausdruck auf der rechten Seite nennt man den Fluß
~ durch die Fläche A. Der Satz beschreibt
des Vektorfeldes A
also wie dieser durch die Quellstärke von ~a im Inneren von
A zustande kommt.13
• Noch ein Satz14
Z
V
~ × ~a =
dV ∇
I
A
Abbildung 4: Sätz von Stokes und
Gauß: Die Rotation zeigt in Richtung des Flächenvektors, das Vektorfeld selbst in Richtung der Randkurve bzw. die Divergenz ist positiv,
das Vektorfeld zeigt in Richtung des
Flächenvektors der Oberfläche.
~ × ~a
dA
1.3.2 Beziehungen zwischen den Operatoren
Mit den Integralsätzen kann man ohne weiter auf Koordinaten
zurückgreifen zu müssen ganz anschaulich erklären, warum die
oben getroffenen Aussagen, dass Gradientenfelder wirbelfrei
und Wirbelfelder quellenfrei sind, richtig sind. Dazu berechnen
wir:
I
Z
von C
~ ) = f |Ende
~
~
~
d~x · (∇f
dA · (∇ × (∇f )) =
Anfang von C ≡ 0
C
A
Dabei wurde zuerst der Satz von Stokes angewendet und dann der Hauptsatz. Zuletzt wurde ausgenutzt, dass bei einer geschlossenen Kurve Anfang und Ende zusammenfallen. Da A beliebig ist, muss
auch der Integrand ganz links verschwinden.
Z
I
I
~
~
~
~
dV ∇ · (∇ × ~a) =
dA · (∇ × ~a) =
d~x · ~a ≡ 0
V
A
C
Dabei wurde zuerst der Satz von Gauß angewendet und dann der Satz von Stokes. Zuletzt wurde
ausgenutzt, dass bei einer geschlossenen Fläche die Randkurve verschwindet. Da V beliebig ist, muss
auch der Integrand ganz links verschwinden.
~ stets von V aus gesehen nach außen gerichtet.
ist vereinbarungsgemäß der Vektor für das Flächenelement dA
~ auf den
wird vereibarungsgemäß die Kurve C stets gegen den Uhrzeigersinn durchlaufen, wenn der Vektor dA
Betrachter gerichtet ist.
12 In der Mechanik kommt daher die Aussage, dass man genau dann entlang eines beliebigen geschlossenen Weges keine
Arbeit verrichtet, wenn das Kraftfeld überall wirbelfrei ist.
13 In der Transporttheorie kommt daher die Aussage, dass die Bilanz hinein- und herausströmender Ladung über ein
beliebiges Volumen genau dann ausgeglichen ist, wenn das Strömungsfeld überall quellenfrei ist.
14 Leider ist mir dazu kein Name bekannt.
10 Dabei
11 Dabei
7
1.3.3
Partielle Integration
So, wie man im eindimensionalen Fall die Produktregel mit dem Hauptsatz verbinden kann, um die
Formel für die partielle Integration zu erhalten, kann man eine mehrdimensionale Produktregel mit
einem Integralsatz verbinden, um Formeln für die partielle Integration zu erhalten. Die folgenden zwei
Beispiele werden später benötigt:
• Die zweite Produktregel ergibt in Verbindung mit dem Satz von Gauß
Z
I
Z
~
~
~ · ~a)
dV (∇f ) · ~a =
dA · f~a −
dV f (∇
V
A
V
• Die dritte Produktregel ergibt in Verbindung mit dem dritten Integralsatz
Z
I
Z
~ ) × ~a =
~ × f~a −
~ × ~a)
dV (∇f
dA
dV f (∇
V
A
V
1.4 Delta-Distribution
1.4.1
Definition
Die δ-Distribution ist durch die Gleichung
Z
dxδ(x) =
G
(
falls 0 ∈ G
sonst
1
0
definiert. δ(x) verschwindet also für x 6= 0 stets. 15 Mit δ(~x) := δ(x)δ(y)δ(z) erhält man
(
Z
1 falls ~0 ∈ G
dV δ(~x) =
0 sonst
G
Aus der Definition von δ(~x) folgt, dass δ(~x) ebenfalls für ~x 6= ~0 verschwindet. Daraus ergibt sich in
Verbindung mit der Definitionsgleichung16:
Z
dV f (~x)δ(~x) = f (~0)
R3
1.4.2
Ein wichtiges Beispiel
Wir schauen uns zunächst den in der Elektrodynamik ständig auftretenden Ausdruck
Für den Gradienten erhält man:
~ 1 = − ~x
∇
3
|~x|
|~x|
1
|~
x|
für ~x 6= ~0 an.
Die Divergenz des Ergebnisses ist17 :
1
~ 1
~ · ~x = − ∇
∆
= −∇
|~x|
|~x|3
|~x|3
!
· ~x −
1
|~x|3
~ · ~x) = 3
(∇
~x
|~x|5
· ~x −
1
|~x|3
!
=0
Aber wie sieht das Ergebnis bei ~x = ~0 aus? Dazu integrieren wir über eine Kugel mit dem Volumen V
um ~x = ~0 und verwenden den Satz von Gauß:
I
Z
1
~·∇
~ 1 = −4π
dA
dV ∆
=
|~
x
|
|~x|
A
V
15 Wenn man will, kann man sich daher den Ausdruck δ(x) z.B. als eine um 0 zentrierte unendlich scharfe Gauß-Kurve
vorstellen.
16 Denn da der Integrand für ~
x 6= ~0 verschwindet, geht f nur mit dem Wert an der Stelle ~0 ein.
17 unter Verwendung der zweiten Produktregel und ~
x·~
x = |~
x|2
8
An diese Kugel18 kann man beliebige Volumina ansetzen, ohne den Wert des Integrals über das
Gesamtvolumen zu ändern, denn einerseits entspricht das Integrieren über Kugel- und angesetzte
Oberfläche dem Integrieren über die gemeinsame Oberfläche, da sich die Flächenelemente an
der Kontaktfläche wegheben, andererseits liefert das zusätzliche Volumen keinen Beitrag, da der
Integrand dort, wie oben nachgerechnet wurde, verschwindet.
Das Integral liefert also den Wert −4π genau dann, wenn das Integrationsvolumen den Ursprung
enthält und sonst liefert es den Wert 0. Das bedeutet
1
∆
= −4πδ(~x)
|~x|
1.4.3 Green’sche Funktion
Wenn eine inhomogene Differentialgleichung
Df = g
mit dem linearen Differentialoperator D, der gesuchten Funktion f und der vorgegebenen Funktion g, der Inhomogenität,
gegeben ist und eine Funktion G, die Green’sche Funktion, mit
der Eigenschaft
DG = δ
bekannt ist19 , so lässt sich mit
Z
dV 0 g(~x0 )G(~x − ~x0 )
f (~x) =
R3
eine Lösung der Differentialgleichung Df = g angeben, denn
es ist
Z
Df (~x) =
dV 0 g(~x0 )δ(~x − ~x0 ) = g(~x)
R3
1
Wie oben berechnet wurde, ist also z.B. G(~x) := − 4π|~
x| eine
Green’sche Funktion für den Differentialoperator ∆.
Man kann sich das Prinzip der Green’schen Funktion so vorstellen: D hängt von dem betrachteten System ab und beschreibt, wie der Zustand des Systems f mit dem äußeren Einfluss g zusammenhängt. Die Green’sche Funktion G ist nun gerade als dasjenige Verhalten des Systems definiert, die es auf eine auf den Nullpunkt konzentrierte Anregung zeigt. Genau so,
wie sich die Anregung selbst aus konzentrierten Anregungen
zusammensetzt (im Sinne einer Faltung mit der δ-Distribution),
setzt sich die Antwort des Systems aus den Antworten auf diese
konzentrierten Anregungen zusammen.
Abbildung 5: Green’sche Funktion des harmonischen gedämpften
Oszillators: So reagiert er auf einen
δ-Kraftstoß bei t = 0. Überlagerung
vieler δ-Stöße, hier z.B. eine sinförmige Anregung ab t = 0: Der
Oszillator schwingt sich ein und bewegt sich dann mit der Anregungsfrequenz.
1.5 Sonstiges
1.5.1 Flächenberechnung
~ × ~a = ~ez , z.B.
Wir betrachten ein Vektorfeld ~a mit ∇
−y
1
x
~a :=
2
0
und betrachten eine ebene Fläche A, die wir in die x,y-Ebene legen. Dann ist der Flächeninhalt20
18 Die Größe der Kugel ist, wie die Rechnung gezeigt hat (dA
~ geht quadratisch, ∇
~ 1 reziprok-quadratisch mit dem Radius
|~
x|
der Kugel) egal.
19 Das bedeutet, dass die Green’sche Funktion G nur von dem Differentialoperator D und nicht von einer konkreten
Inhomogenität g abhängt.
20 Dabei wird in der Mitte der Satz von Stokes verwendet.
9
Z
A
~ · ~ez =
dA
Z
A
~ · (∇
~ × ~a) =
dA
I
C
d~x · ~a =
1
2
I
C
(~x × d~x) · ~ez
Wenn wir dies für die anderen beiden Ebenen auch machen
und die entstehenden Gleichungen zusammenfassen, dann erhalten wir
Z
I
~= 1
dA
~x × d~x
2 C
A
Anschaulich zeigt diese Gleichung wie die Fläche sich aus
schmalen Dreiecken zusammensetzt, die man erhält, wenn
Abbildung 6: Zur Flächenberechman den Rand der Fläche entlangläuft.
nung
1.5.2
Parametrisierung
~ oder dV berechnen zu können, führt man
Um ein konkretes Integral mit einem Differential wie d~x, dA
eine Funktion ~x(t), ~x(s, t) bzw. ~x(r, s, t) ein und gibt für das/die Argument(e) Grenzen an, so dass ~x
die Kurve, die Fläche bzw. das Volumen durchläuft, wenn die Argumente den so definierten Bereich
durchlaufen.
Diese Argumente heißen die Parameter und die eingeführte Funktion nennt man die Parametrisierung des Gebildes. Nun kann man die Vektordifferentiale durch die Differentiale der Parameter ausdrücken, indem man sie aus den Vektordifferentialen für die einzelnen Parameter zusammensetzt:
• Berechnung eines Kurvenintegrals
Es seien t1 und t2 die Grenzen für den Parameter t21 , so
dass C = {~x(t) | t ∈ [t1 ; t2 ]}22 ist. Dann ist
d~x =
∂~x
dt
∂t
und das Kurvenintegral kann folgendermaßen berechnet
werden:23
Z t2
Z
∂~x
· ~a(~x(t))
dt
d~x · ~a(~x) =
∂t
t1
C
• Berechnung eines Flächenintegrals
Es seien zusätzlich s1 und s2 die Grenzen für den Parameter
s, so dass A = {~x(s, t) | (s, t) ∈ [s1 ; s2 ] × [t1 ; t2 ]}. Dann ist
~ = ∂~x × ∂~x dsdt
dA
∂s
∂t
~ zu achten ist, z.B.
wobei auf die Richtung von dA
zeigt er bei geschlossenen Flächen nach außen.24 Das
Flächenintegral kann dann folgendermaßen berechnet
werden:25
Z s2 Z t2 Z
∂~x ∂~x
~
· ~a(~x(s, t))
×
dt
ds
dA · ~a(~x) =
∂s
∂t
t1
s1
A
Abbildung 7: Tangentialvektor an
eine Kurve (Wegelement) und Paar
von Tangentialvektoren an eine
Fläche (Flächenelement)
21 Dieser muss, anders als die Schreibweise es andeutet, nicht zwangsweise die Zeit sein, in der die Kurve durchlaufen
wird, handelt es sich bei der Kurve aber um eine Trajektorie, kann das durchaus sinnvoll sein.
22 Dabei muss man allerdings beachten, dass die Kurve als solche neben der Menge ihrer Punkte auch noch die Information
darüber enthält, in welcher Richtung sie durchlaufen wird.
23 Dabei kann statt · auch × zwischen dem Differential und dem Integranden stehen. Ist der Integrand eine skalare Funktion, dann kann man zwar genauso rechnen, alternativ kann man das Integral jedoch auch komponentenweise ausführen.
24 Die einleitende Konstruktionsvorschrift könnte man hier so lesen: Wir berechnen den Flächenvektor des Parallelograms,
dessen Kantenvektoren tangential an die Kurven beim Durchlaufen der einzelnen Parameter liegen, dieses Parallelogram
liegt dann tangential an der Fläche.
25 Wiederum mit dem Hinweis, ggf. · durch × zu ersetzen.
10
• Berechnung eines Volumenintegrals
Es seien zusätzlich r1 und r2 die Grenzen für den Parameter
r, so dass V = {~x(r, s, t) | (r, s, t) ∈ [r1 ; r2 ] × [s1 ; s2 ] × [t1 ; t2 ]}.
Dann ist
∂~x
∂~x ∂~x
·
×
dV =
drdsdt
∂r
∂s
∂t
|
{z
}
=detD~
x(r,s,t)
wobei auf das Vorzeichen von dV zu achten ist, es ist positiv.26 Das Volumenintegral kann dann folgendermaßen
Abbildung 8: Noch ein Vektor senkberechnet werden:
recht zum Flächenelement ergibt
Z
Z r2 Z s2 Z t2 ∂~x
∂~x ∂~x
insgesamt ein Volumenelement.
·
f (r, s, t)
×
dt
ds
dr
dV f (~x) =
∂r
∂s
∂t
t1
s1
r1
V
2 Transporttheorie
2.1 Stromdichte
Der Übergang von punktförmigen Objekten, die mit einer Art
von Ladung, wie z.B. Anzahl, Masse oder allgemein einer gewissen Größe g behaftet sind, zu einer kontinuierlichen Verteidg
lung, die durch die entsprechende g-Dichte dV
gegeben ist,
dg
wird für den entsprechenden g-Strom dt durch die Definition
der g-Stromdichte ~j mit der g-Dichte ρ und der Geschwindigkeit
~v
~j := ρ~v
~ ·
geleistet. Wir schauen uns ein Volumenelement dV = dA
d~
s
27
d~s an, das sich mit der Geschwindigkeit ~v = dt durch das
~ bewegt.
Flächenstück dA
Abbildung 9: Zur Interpretation der
Stromdichte als Strom pro Fläche:
Nur die zur Fläche senkrechte Komponente
der Stromdichte trägt zum
Während die g-Dichte also die Bedeutung der g-Ladung pro
Volumen hat, gibt die g-Stromdichte den g-Strom pro Fläche Strom bei.
oder anders gesagt die g-Ladung pro Zeit und Fläche an. Die
~ auf der linken Seite mit einem SkalarproSchreibweise mit dA
dukt zeigt dabei, dass nur der Teil der Stromdichte, der in Richtung des Flächenvektors zeigt, also senkrecht durch die Fläche
geht, zum Strom beiträgt.
~ = ρ~v · A
~ = dg d~s · dA
~ = dg
~j · dA
dV dt
dt
2.2 Kontinuitätsgleichung
Die Aussage, dass die Änderung der in einem Volumen enthaltenen g-Ladung durch die g-Strombilanz
durch die Oberfläche zustande kommt, lautet, mit dieser Interpretation der Stromdichte formuliert
Z
I
d
dg
dg
~
~
=−
=−
dA · j =
dV ρ
dt nach draußen
dt im Inneren
dt V
A
und kann mit dem Satz von Gauß, angewendet auf die linke Seite, sowie der Beliebigkeit des Volumens V , in das lokale Gesetz
~ · ~j + ρ̇ = 0
∇
26 Diesmal führt die einleitende Konstruktionsvorschrift auf das Spatprodukt und das ist positiv, wenn die vorkommenden
Vektoren in dieser Reihenfolge ein Rechtssystem bilden.
27 Diese Schreibweise haben wir bereits im Abschnitt über das Parametrisieren für ein Volumenelement verwendet.
11
die Kontinuitätsgleichung, umformuliert werden. Umgangssprachlich kann man mit der Interpretation der Divergenz als Quellstärke auch sagen, dass eine g-Ladungsquelle an ihrem Ort g-Ladung
verbraucht.
3
Statik
• Im Folgenden bezeichnen die mit einem Strich versehenen Vektoren stets den Ort einer Quelle
und die Vektoren ohne Strich den Ort, an dem das Feld betrachtet wird, das diese Quellen
erzeugen. Die Ableitungen beziehen sich auf letztere.
• Auf der linken Seite werden elektrische Phänomene und auf der rechten Seite die magnetischen Entsprechungen dargestellt.
3.1 Einfache Quellen
Eine elektrische Punktladung Q erzeugt das elek~ :
trische Feld E
~ =
E
Eine bewegte Punktladung erzeugt die magneti~ :
sche Flussdichte B
~x − ~x0
1
Q
4π0 |~x − ~x0 |3
0
~ = µ0 Q~v × ~x − ~x
B
4π
|~x − ~x0 |3
~ ist wirbelfrei:
Das elektrische Feld E
~ ×E
~ = ~0
∇
Wir haben es ja bereits als Gradienten von
kennengelernt.
~ ist quellenfrei:
Die magnetische Flussdichte B
~ ·B
~ =0
∇
Denn mit der vierten Produktregel taucht wieder
~ 1 0 auf.
die Rotation von ∇
|~
x−~
x|
1
|~
x−~
x0 |
28
Daher kann man es durch das elektrische Potential φ ausdrücken:
~ = −∇φ
~
E
Für eine Punktladung Q ist das elektrische Potential φ
1
1
Q
φ=
4π0 |~x − ~x0 |
Wegen
~
−∇const.
= ~0
ist es nur bis auf eine Konstante festgelegt
~
Daher kann man sie durch das Vektorpotential A
ausdrücken:
~ =∇
~ ×A
~
B
Für eine bewegte Punktladung ist das Vektorpo~
tential A
1
~ = µ0 Q~v
A
4π
|~x − ~x0 |
Wegen
~ × (∇f
~ ) = ~0
∇
ist es nur bis auf den Gradienten einer skalaren
Funktion f festgelegt.
~ nur von der Differenz der Potentiale an den
hängt deshalb auch ein Kurvenintegral des elektrischen Feldes E
Endpunkten der Kurve ab, welche als elektrische Spannung U zwischen diesen Punkten bezeichnet wird.
28 Außerdem
12
3.2 Quellenverteilungen
3.2.1 Potentiale
Für eine kontinuierliche Ladungsverteilung wer- Für eine kontinuierliche Stromverteilung werden
Q
und Wegelementen d~s (insgesamt
den aus Punktladungen Q Ladungselemente aus Strömen dt
0
~ und Wegelemente d~s
ρdV , deren Superposition
Q~v ) Stromelemente ~j · dA
0
~
(insgesamt jdV ), deren Superposition
Z
Z
µ0
1
1
1
0
~
A=
dV 0~j
dV ρ
φ=
4π0
|~x − ~x0 |
4π
|~x − ~x0 |
für das elektrische Potential ergibt.
für das Vektorpotential ergibt.
29
3.2.2 Felder kontinuierlicher Quellverteilungen
~ einer Ladungsdichte ρ ist Die magnetische Flussdichte B
~ einer Stromdichte
Das elektrische Feld E
~j ist mit der dritten Produktregel
mit der ersten Produktregel
Z
Z
~x − ~x0
~x − ~x0
~ = −∇φ
~ = 1
~ =∇
~ ×A
~ = µ0
E
B
dV 0~j ×
dV 0 ρ
3
4π0
4π
|~x − ~x0 |
|~x − ~x0 |3
Coulomb’sches Gesetz
Biot-Savart’sches Gesetz
Die zweite Produktregel liefert
Die fünfte Produktregel liefert
!
!
0
~
x
−
~
x
0
~ × ~j ×
∇
~ · ρ ~x − ~x
∇
|~x − ~x0 |3
3
0
|~x − ~x |
0
0
0
~ ~x − ~x
~ · ~x − ~x
~j · ∇)
~j ∇
~
x
−
~
x
−
(
=
3
~ ·
= ρ∇
|~x − ~x0 |
|~x − ~x0 |
3
|~x − ~x0 |
~x − ~x0 ~ ~
(a)
= 4π~jδ(~x − ~x0 ) +
= 4πρδ(~x − ~x0 )
(∇ · j)
|~x − ~x0 |3 | {z }
(b)
=−ρ̇ =~0
30
Damit kann die Divergenz des elektrischen Feldes
~ berechnet werden:
E
Z
ρ
~ ·E
~ = 1
∇
dV 0 ρδ(~x − ~x0 ) =
0
0
Dies ist das Gauß’sche Gesetz in differentieller
Form.
Damit kann die Rotation der magnetischen Fluss~ berechnet werden:
dichte B
Z
~ ×B
~ = µ0 dV 0~jδ(~x − ~x0 ) = µ0~j
∇
Dies ist das Ampère’sche Gesetz in differentieller
Form.
3.3 Sätze über den Rand
Mit dem Satz von Gauß ergibt sich
Z
I
~·E
~ = 1
dV 0 ρ
dA
0 V
A
das Gauß’sche Gesetz in integraler Form.
Mit dem Satz von Stokes ergibt sich
I
Z
~ = µ0
~ 0 · ~j
d~x · B
dA
C
A
Das Ampère’sche Gesetz in integraler Form.
29 Hier wurde dA
~ · d~s = dV 0 zusammengefasst. Fließen die Ladungen aber mit einem konstanten Strom I in einem Draht,
~ = I zusammenzufassen. Statt ~jdV 0 hat man dann also Id~s und muss ein Kurvenintegral
so ist es sinnvoller, den Teil ~j · dA
(nämlich entlang des Drahtes) ausführen.
30 Hier wurde (a) für jede Komponente des zweiten Terms partielle Integration im Sinne der zweiten Produktregel und
des Satzes von Gauß verwendet, wobei der Randterm genau wie die Stromdichte im Unendlichen verschwindet und (b) die
Kontinuitätsgleichung ausgenutzt, sowie der Umstand, dass die Ladungsdichte ρ bei statischen Situationen erhalten ist.
13
3.4 Kräfte auf Ladungen im Feld
3.4.1
Ladung im elektrischen Feld
Das elektrische Feld dient als Abstraktion der Kraftwirkung zwischen elektrischen Ladungen, für eine
~ für die Coulombkraft F~ auf die Ladung F~ = QE.
~
Probepunktladung Q gilt mit dem elektrischen Feld E
Dem elektrischen Potential φ entspricht für eine Probepunktladung Q also auch das Energiepotential
V = Qφ. Elektrische Potentialdifferenzen zwischen zwei Punkten bezeichnet man auch als elektrische
Spannung zwischen diesen Punkten.
3.4.2
Bewegte Ladung in der magnetischen Flussdichte
~ so wirkt
Bewegt sich die Probeladung Q mit der Geschwindigkeit ~v in der magnetischen Flussdichte B,
~
~
auf die Ladung die Lorentzkraft F = Q~v × B. Diese Kraft kann keine Arbeit an der Ladung verrichten,
denn für die Leistung gilt P = F~ · ~v = 0, die Ladung wird stets senkrecht zu ihrer Geschwindigkeit
beschleunigt.
3.5 Dipole
3.5.1
Elektrische Dipole
Eine Anordnung aus zwei entgegengesetzen Punktladungen ±Q im Abstand d~ nennt man einen elek~
trischen Dipol mit dem Dipolmoment p~ := Qd.
Potential
Für das elektrische Potential erhalten wir, wobei ~x0 den Ort des Dipols, also die Mitte zwischen
den beiden Ladungen bezeichnet
1
1
1
1
1
1
1
~
~
−
≈ −
Q Q(d~ · ∇)
(~
p · ∇)
=−
φ=
0
~
~
4π0
4π0
|~x − ~x |
4π0
|~x − ~x0 |
~x − (~x0 + d ) ~x − (~x0 − d )
2
Feld
2
Die Näherung der Richtungsableitung des Potentials einer Punktladung als Differenz der Potentiale zweier
benachbarter Punktladungen wird exakt für d~ → ~0 (Idealer Dipol) oder für
|~x − ~x0 | d~ (Fernfeld).
~ des idealen Dipols p~ ist dann:
Das elektrische Feld E
~ = −∇φ
~ =
E
1 ~
1
~
∇(~
p · ∇)
4π0
|~x − ~x0 |
Drehmoment
Das Drehmoment T~ auf einen elektrischen Dipol p~ setzt sich zusammen aus den Drehmomenten
auf die Punktladungen an den Enden.
1~
~ + − 1 d~ × (−QE)
~ = d~ × (QE)
~ = p~ × E
~
T~ =
d × (QE)
2
2
~ dreht.
Es ist also so gerichtet, dass es den Dipol p~ in Richtung des elektrischen Feldes E
potentielle Energie
Wir denken uns einen Stab der Länge r an den Dipol angebracht, an dessen Ende man he~
beln kann, um den Dipol gegen das Feld zu verdrehen. Die Kraft
F ,die
man an seinem Ende
~ ~
aufbringen muss, ist senkrecht zum Stab gerichtet und es gilt r F = T . Um den Dipol um den
Winkel ϕ zu verdrehen, legt man mit dem Stabende den Weg s = rϕ zurück. Mit einem rechten
~ als Referenzposition, wobei die Kraft auf das Stabende in
Winkel zwischen Dipol p~ und Feld E
14
Richtung ϕ = 0 wirkt, weshalb d~s und F~ in entgegengesetzte Richtungen zeigen, gilt dann für
die potentielle Energie:
Z rϕ
Z rϕ
Z ϕ
Z ϕ
~
~
~
~
~
d~s · F =
|d~s| F =
dϕ T~ =
dϕ |~
p| E
p| E
p·E
V =−
sin ϕ = − |~
cos ϕ = −~
rπ
2
rπ
2
π
2
π
2
Kraft
~ ×E
~ = ~0 gilt mit der sechsten Produktregel für die Kraft F~ auf den Dipol
Wegen ∇
~ = ∇(~
~ p · E)
~ = p~ × (∇
~ × E)
~ +(~
~ E
~ = (~
~ E
~
F~ = −∇V
p · ∇)
p · ∇)
| {z }
~0
Wir können sie auch direkt über die Kräfte auf die beiden Ladungen berechnen:
!
!!
~
~
d
d
~ ~x −
~ E
~ = (~
~ E
~
~ ~x +
−E
≈ Q(d~ · ∇)
p · ∇)
F~ = Q E
2
2
3.5.2 Magnetische Dipole
~ 31 nennt man einen magnetischen Dipol
Einen vom Strom I durchflossenen Draht mit der Kreisfläche A
~
mit dem Dipolmoment m
~ := I A.
Potential
Parametrisiert man die Stromschleife mit ~x032 und den Ort ~x33 so, dass
cos ϕ
x
− sin ϕ
p
~x0 = r sin ϕ , ~x = 0 , woraus d~x0 = r cos ϕ , |~x − ~x0 | = r2 + x2 + z 2 − 2rx cos ϕ
0
z
0
~ mit der Näherung r → 0 (idealer Dipol) oder
folgt, gilt, so können wir das Vektorpotential A
|~x| r (Fernfeld) berechnen:
I
Z 2π
Z
− sin ϕ
0
~
d~x
1
µ0
µ0
j
~ = µ0
cos ϕ
dϕ p
=
I
=
Ir
dV 0
A
4π
|~x − ~x0 |
4π
|~x − ~x0 |
4π
r2 + x2 + z 2 − 2rx cos ϕ
0
0
!
2
Z 2π
Z 2π
rx cos2 ϕ − r2 cos ϕ
(b) µ0
Ir~ey
cos ϕ
µ0 Ir~ey
(a)
√
√
+ ...
dϕ q
dϕ cos ϕ +
≈
=
2
4π x2 + z 2 0
4π x2 + z 2 0
x2 + z 2
cos ϕ
1 + r −2rx
x2 +z 2
=
µ0
µ0
µ0 Iπr2 x~ey
~x
~x
=
Iπr2~ez × 3 =
m
~ × 3
√
4π x2 + z 2 3
4π
4π
|~x|
|~x|
Verallgemeinert auf eine beliebige Ausrichtung des magnetischen Dipols m
~ und Position ~x0
~ in der Fernfeldnäherung am Ort ~x
desselben ist das Vektorpotential A
~x − ~x0
µ0
1
~ = µ0 m
~
A
~ ×
=
−
m
~
×
∇
4π
|~x − ~x0 |
4π
|~x − ~x0 |
34
Feld
~ des idealen magnetischen Dipols m
Die magnetische Flussdichte B
~ ist dann mit der
31 Der Flächenvektor A
~ zeigt dem Betrachter entgegen, wenn der Strom von ihm aus gesehen gegen den Uhrzeigersinn
fließt.
32 Dabei dürfen wir diese ohne Einschränkung der Allgemeinheit mit Normalenvektor ~
ez um ~0 legen.
33 Wegen der Zylindersymmetrie des Problems darf für diesen y = 0 angenommen werden.
34 Dabei wurde ausgenutzt: (a) Die erste Komponente des Integrals verschwindet mit Integration durch Substitution, denn
1
≈ 1 − 12 x + 38 x2 , wobei der einzige in r noch quadratische Term im dritten
die Stammfunktion ist periodisch. (b) Es gilt √1+x
Term dieser Entwicklung beim Integrieren verschwindet.
15
fünften Produktregel:
1
1
1
µ0 ~
~ ∇
~
~ =∇
~ ×A
~ = µ0
~
~ · ∇)
B
∇(m
~ · ∇)
−
m
~
∆
=
(m
0
0
4π
|~x − ~x |
|~x − ~x | 4π
|~x − ~x0 |
| {z }
=0 für ~
x6=~
x0
Drehmoment
Das Drehmoment T~ auf einen magnetischen Dipol m
~ setzt sich zusammen aus den Drehmomenten auf die einzelnen Abschnitte der Stromschleife.
I
I
Z
I
1
~ − d~x × (~x × B)
~
~ = I ~x × (d~x × B)
~ (a)
~x × (d~x × B)
T~ =
~x × (dV ρ~v × B)
= I
2
I
I
1
(b)
~ = I 1 d~x × ~x ×B
~ =m
~
I (~x × d~x) × B
~ ×B
=
2
2
|
{z
}
~
=A
35
~ dreht.
Es ist also so gerichtet, dass es den Dipol m
~ in Richtung der magnetischen Flussdichte B
pontentielle Energie
Analog wie im elektrischen Fall ergibt sich für die potentielle Energie V
~
V = −m
~ ·B
Kraft
~ ×B
~ = µ0~j = ~0 gilt, d.h. am Ort der Stromschleife
Entsprechend ist die Kraft F~ auf den Dipol, falls ∇
keine Quellen der magnetischen Flussdichte sind36
~ B
~
F~ = (m
~ · ∇)
~ so verhält
Zusammenfassend stellen wir fest, dass sich ein elektrischer Dipol ~p im elektrischen Feld E
~
wie ein magnetischer Dipol m
~ in der magnetischen Flussdichte B.
3.6 Felder in Materie
3.6.1
Ausrichtung von Dipolen
In einem Dielektrikum befinden sich (ggf. durch
Influenz) elektrische Dipole ~
p, deren Dichte P~ die
Polarisation genannt wird.
In einem magnetisierbaren Material befinden
sich magnetische Dipole m,
~ deren Dichte J~ die
Magnetisierung genannt wird.
d~
p
dm
~
P~ :=
J~ :=
dV
dV
~ der Magnetisierung M
~ ist
Das Vektorpotential A
Das elektrische Potential φ der Polarisation P~ ist
Z
Z
1
1
1
0~
~
~
~ = − µ0
dV
J
×
φ=−
∇
dV 0 (P~ · ∇)
A
4π0 V
|~x − ~x0 |
4π V
|~x − ~x0 |
Mit der ersten Formel für die partielle Integration Mit der zweiten Formel für die partielle Integration
wird daraus
wird daraus
Z
I
~
~
P~
1
µ0
0 ∇×J
0
~
~
dV
dA ·
φ =
A
=
4π0 A
|~x − ~x0 |
4π V
|~x − ~x0 |
I
Z
~ · P~
1
µ0
J~
∇
~×
−
−
dA
dV 0
0
4π0 V
|~x − ~x |
4π A
|~x − ~x0 |
35 Dabei wurde ausgenutzt: (a) Partielle Integration und (b) die Jacobi-Identität: ~
a × (~b × ~c) + ~c × (~a × ~b) + ~b × (~c × ~a) = ~0, die
man mit der Formel für das doppelte Kreuzprodukt beweisen kann.
36 Die direkte Rechnung ist etwas länger und kann unter http://itp1.uni-stuttgart.de/arbeitsgruppen/wunner/edyn.ps.gz
im Abschnitt 9.4 auf Seite 102 gefunden werden.
16
37
Der erste Term beschreibt eine Oberflächenla- Der zweite Term beschreibt eine Oberflächendungsdichte, die der zur Oberfläche senkrechten stromdichte (also Stromdichte mal Länge, das
Komponente der Polarisation P~ entspricht.
entspricht einem Strom pro Breite), die der durch
die Richtung der Magnetisierung J~ gegebenen
an die Oberfläche tangentialen Komponente
derselben entspricht.
Der zweite Term beschreibt eine Ladungsdichte
Der erste Term beschreibt eine Stromdichte
~ · P~
ρpol := −∇
Diese Polarisationsladungsdichte ist also neben
der externen Ladungsdichte ρext eine weitere
Quelle des elektrischen Potentials. Die Bilanz der
Ladungsdichten lautet damit
ρ = ρext + ρpol
~ × J~
~jmag := ∇
Diese Magnetisierungsstromdichte ist also neben
der externen Stromdichte ~jext eine weitere Quelle
des Vektorpotentials. Die Bilanz der Stromdichten
lautet damit
~j = ~jext + ~jmag
3.6.2 Umdefinition für externe Quellen
Für die externe Ladungsdichte ρext gilt also
Für die externe Stromdichte ~jext gilt also
ρext
~ · E
~ + 1 P~
~
~ × (B
~ − µ0 J)
=∇
µ0~jext = ∇
0
0
Mit der Definition der dielektrischen Verschie- Mit der Definition der magnetischen Feldstärke
bung
~ + P~
~ := 0 E
~ := 1 B
~ − J~
D
H
µ0
ergibt sich
ergibt sich
~ ·D
~ = ρext
~ ×H
~ = ~jext
∇
∇
Dieses Feld kann also anhand der externen La- Dieses Feld kann also anhand der externen Ströme
dungen bestimmt werden.
bestimmt werden.
Abbildung 10: Beispiel: Die dielektrische Verschiebung (rot) wird nur durch die äußeren Ladungen
bestimmt, aber die Dipole (blau) im Material schwächen das elektrische Feld (grau).
Die physikalische Annahme
~
P~ = 0 χE
Die physikalische Annahme
mit der Suszeptibilität χ ergibt mit der Definition
~
J~ = χmag H
mit der magnetischen Suszeptibilität χmag ergibt
mit der Definition
r := 1 + χ
der Dielektrizitätskonstante
der Permeabilität
µr := 1 + χmag
~
~ = µ0 µr H
B
~
~ = 0 r E
D
37 Vorzeichenumkehrungen
ergeben sich hier daraus, dass mal nach den Variablen ohne und mal nach denen mit Strich
abgeleitet wird.
17
4
Dynamik
4.1 Induktion
Wir beschreiben einen Draht durch die Kurve C. Dieser werde mit der Geschwindigkeit ~v =
~ bewegt. Aufgrund der Lorentzkraft führt dies zu:
zunächst statischen Magnetfeld B
Z
I
I
d
~
~
~
(d~s × d~x) ·B
Uind =
d~x · (~v × B) = − (~v × d~x) · B = −
dt A | {z }
C
C
d~
s
dt
in einem
~
=dA
|
{z
=:Φ
}
Diese Induktionsspannung Uind , tritt auch dann auf, wenn sich nicht die Kurve bewegt und damit
der magnetische Fluss Φ, ändert, sondern auch dann, wenn der Fluß nur durch Änderung der magnetischen Flussdichte - deren Name nun geklärt ist - beeinflusst wird, wobei die Spannung nun in
Ermangelung einer Bewegung der Ladungsträger durch die elektrische Feldkraft statt der Lorentzkraft zustande kommt:
I
~ = −Φ̇
d~x · E
Uind =
C
Die Flussdichte wird übrigens größer, wenn in dem Draht ein Strom in der durch die Kurve C gegebenen Richtung zu fließen beginnt. Das negative Vorzeichen bewirkt daher, dass die Induktionsspannung in die umgedrehte Richtung zeigt. Dieser Umstand wird als Lenz’sche Regel bezeichnet und
kann umgangssprachlich auch so formuliert werden: Die magnetische Induktion wirkt ihrer Ursache
entgegen.
Wir wenden den Satz von Stokes an und finden, dass in dynamischen Situationen das elektrische Feld
nicht mehr wirbelfrei ist, genauer gesagt gilt wegen der Beliebigkeit des Drahtes
~ ×E
~ = −B
~˙
∇
4.2 Potential in zeitabhängigen Situationen
~ ist nun, da es nicht mehr wirbelfrei ist, nicht mehr Gradient eines skalaren
Das elektrische Feld E
Potentials, aber wegen
~ × (E
~ + A)
~˙ = ∇
~ ×E
~ +B
~˙ = ~0
∇
kann das Potential φ nun so gewählt werden, dass
~ = −∇φ
~ −A
~˙
E
Damit die Freiheiten, die man bei der Wahl der Potentiale hat, hiermit konsistent sind, muss man, wenn
~ einen Gradienten ∇f
~ addiert, zu φ auch −f˙ addieren, damit E
~ unverändert bleibt.
man zu A
4.3 Maxwell’sche Korrektur
~ ×H
~ = ~jext ist mit ∇
~ · (∇
~ × ~a) = 0 für beliebige Vektorfelder ~a und der
Für die statische Gleichung ∇
~ · ~jext = −ρ̇ext wegen
Kontinuitätsgleichung für die externen Ladungen ∇
~ · (∇
~ × H)
~ =∇
~ · ~jext = −ρ̇ext
0=∇
die Konstanz der externen Ladungsdichte ρ̇ext = 0 eine notwendige Bedingung. Im Allgemeinen, d.h.
~ ×H
~ noch ein Term hinzu, dessen Divergenz ρ̇ext ist.
auch in zeitabhängigen Situationen, kommt zu ∇
~
~
Es ist ∇ · D = ρext und damit
~ ×H
~ = ~jext + D
~˙
∇
18
~˙ Eine Sastets konsistent. Der zusätzliche Term ist die dielektrische Verschiebungsstromdichte D.
che gehört noch buchstäblich ans Licht gebracht: Zusammen mit der Gleichung für die Induktion
~ ×E
~ = −B
~˙ können sich elektrische und magnetische Felder also gegenseitig erzeugen.
∇
4.4 Maxwell Gleichungen
Wir fassen die Gleichungen, die die Felder unter Berücksichtigung von Ladungen und Strömen, polarisierbarem und magnetisierbarem Material sowie zeitlichen Änderungen beschreiben, zusammen:
~ ·D
~
∇
~ ×E
~
∇
=
=
~ ·B
~
∇
~ ×H
~
∇
ρext
~˙
−B
=
0
~˙
= ~jext + D
Links stehen wie üblich elektrische, rechts magnetische Felder. Umgekehrt dazu tauschen ihre Ableitungen auf, und zwar in der unteren Zeile, der mit den Wirbelstärken. Bei den Quellstärken gibt es
keine solche Welchselwirkung. Auf der Hauptdiagonalen tauchen die externen Quellen der Felder
auf, daher sind die Felder dort die dielektrische Verschiebung und das magnetische Feld statt des
elektrischen Feldes bzw. der magnetischen Flussdichte.
Die Kraftwirkung des elektrischen Feldes und der magnetischen Flussdichte auf eine Ladung Q ist
gemäß
~ + ~v × B)
~
F~ = Q(E
durch die Coulumb- und die Lorentzkraft gegeben.
4.5 Einfache Bauteile
4.5.1 Kondensator
In einem Kondensator mit der Fläche A, der mit der elektrischen
Ladung Q geladen wurde, ist das elektrische Feld im Inneren
dem Betrage nach E und außen sehr klein, daher ergibt sich
mit dem Gauß’schen Gesetz für eine Fläche, die um die positiv
geladene Platte gelegt wird
DA = Q oder EA =
Q
0 r
Ist die an den Kondensator angelegte Spannung U und der
Plattenabstand d, so gilt
E=
U
d
Abbildung 11: Schematische Darstellung des Kondensators
und es gilt
A
Q
= 0 r
U
d
für die Kapazität C des Kondensators. Sie kann also durch Einsetzen eines Dielektrikums in den Kondensator erhöht werden. Für andere Kondensatorgeometrien ermittelt man die Kapazität C , indem
man aus der Ladung Q auf dem Kondensator durch ein Wegintegral über das elektrische Feld dieser
Ladung - gegeben durch das Coulomb’sche Gesetz - vom einen Pol zum anderen die zugehörige
Spannung U bestimmt. Die in dem elektrischen Feld im Kondensator gespeicherte Energie ist
Z Q
Z
1
1 Q
Q2
= CU 2
W =
dq U =
dq q =
C
2C
2
0
0
C :=
Mit dem Volumen V = Ad des Kondensators folgt für die Energiedichte wel =
Feldes E
W
CU 2
0 r AE 2 d2
1
1
1 1
wel :=
D2
=
=
= 0 r E 2 = ED =
V
2V
2V d
2
2
2 0 r
19
W
V
des elektrischen
4.5.2
Spule
In einer Spule mit der Länge l, die vom Strom I durchflossen
wird, ist die magnetische Flussdichte im Inneren dem Betrage nach B und außen sehr klein, daher ergibt sich mit dem
Ampère’schen Gesetz für eine Kurve, die um die Windungen
so gelegt wird, dass der Strom auf den Betrachter zufließt,
wenn die Kurve von ihm aus gesehen gegen den Uhrzeigersinn
verläuft
Hl = nI oder Bl = µ0 µr nI
Dabei ist n die Zahl der Windungen der Spule. Ist die Querschnittsfläche der Spule A, so gilt
Uind = −nAḂ
Abbildung 12: Schematische Darstellung der Spule
und es gilt
Uind
A
= µ0 µr n2
˙
l
I
für die Induktivität L der Spule. Sie kann also durch Einsetzen eines Materials mit hoher Permeabilität
in die Spule erhöht werden. Für andere Spulengeometrien ermittelt man die Induktivität L, indem
man aus der Stromänderung I˙ durch die Spule durch ein Flächenintegral über die Änderung der
magnetischen Flussdichte - gegeben durch das Biot-Savart’sche Gesetz - über die Querschnittsfläche
die zugehörige Induktionsspannung Uind bestimmt. Die in der magnetischen Flussdichte in der Spule
gespeicherte Energie ist
L := −
W =−
Z
t
dt Uind I =
0
Z
t
dt LI I˙ =
0
Z
I
0
dI LI =
1 2
LI
2
Mit dem Volumen V = Al der Spule folgt für die Energiedichte wmag = W
V der magnetischen Flussdichte
B
W
1
LI 2
µ0 µr n2 AH 2 l2
1
1 1
wmag :=
= µ0 µr H 2 = BH =
B2
=
=
V
2V
2V ln2
2
2
2 µ0 µr
4.6 Energieerhaltung
Wir betrachten die gesamte im elektromagnetischen Feld gespeicherte Energiedichte
w=
1~ ~ 1~ ~
D·E+ H ·B
2
2
~ und E
~ bzw. B
~ und H
~ einander proportional sind, erhalten wir
Unter der Annahme, dass die Felder D
mit den Maxwell’schen Gleichungen sowie der vierten Produktregel
~˙ · E
~ +H
~ ·B
~˙ = (∇
~ × H)
~ ·E
~ −H
~ · (∇
~ × E)
~ − ~jext · E
~ = −∇
~ · (E
~ × H)
~ − ~jext · E
~
ẇ = D
~ := E
~ ×H
~ erhalten wir die Gleichung für die Energieerhaltung
Mit der Definition des Poynting-Vektors S
~ ·S
~ + ~jext · E
~ =0
ẇ + ∇
~ (wie mit der Anzahldichte n und der Ladung Q der Ladungsträger die Rechnung
Dabei ist ~jext · E
~
~ = n~v · F~ zeigt) die Dichte der Leistung der Ladungsträger und durch Vergleich mit
~jext · E = Qn~v · E
~ die Bedeutung der Energie-Stromdichte hat.
der Kontinuitätsgleichung finden wir, dass S
20
4.7 elektromagnetische Wellen
4.7.1 Betrachtung der Felder ohne Quellen
Wir betrachten die Maxwell Gleichungen mit Material, welches den Annahmen für lineare Polarisa~ voraus. Außerdem
~ sowie B
~ = µ0 µr H
~ = 0 r E
tion bzw. Magnetisierung gehorcht, d.h. wir setzen D
nehmen wir an, dass keine Ladungen oder Stromdichten vorliegen, d.h. ρext = 0 und ~jext = ~0. Dann
folgt
~
∆E
=
~ ∇
~ ·E
~ )−∇
~ ×H
~˙ = 0 r µ0 µr E
~¨
~ × (∇
~ × E)
~ = µ0 µr ∇
∇(
| {z
}
ρ
0
= ext
r =0
~
∆H
=
~ ∇
~ ·H
~)−∇
~ ×E
~˙ = 0 r µ0 µr H
~¨
~ × (∇
~ × H)
~ = −0 r ∇
∇(
| {z
}
=0
Mit der Definition des Wellenoperators ( Quabla“)
”
:=
1 ∂2
−∆
c2 ∂t2
wobei c = √0 r1µ0 µr die Ausbreitungsgeschwindigkeit der elektromagnetischen Welle ist,38 lässt sich
jede der beiden Gleichungen umschreiben in eine Wellengleichung:
~ = ~0
E
~ = ~0
H
Die Wellengleichung nennt man - genau wie in der linearen Algebra ein Gleichungssystem - homogen, wenn die rechte Seite verschwindet. Sie wird gelöst durch die Wellenfunktion
~ =E
~ 0 ei(ωt−~k·~x)
E
~ =H
~ 0 ei(ωt−~k·~x)
H
wobei die Dispersionsrelation ω = c ~k erfüllt sein muss.
ϕ = ωt − ~k · ~x ist die Phase. Als ϕ(t) aufgefasst beschreibt sie eine Schwingung mit der Kreisfrequenz
ω. Gilt ϕ = const., so haben wir in ~x eine Ebenengleichung vorliegen. Diese Ebenen konstanter Phase
heißen auch Wellenfronten und sind nützlich für geometrische Betrachtungen. Sie bewegen sich mit
der Geschwindigkeit c in Richtung von ~k. Dieser Typ Welle wird daher auch ebene Welle genannt.
Wir fassen symbolisch die Wirkung der in den Maxwellgleichungen vorkommenden Ableitungen auf
die Wellenfunktion zusammen, die hier alle als Multiplikationen wirken:
~
∇·
~
∇×
∂
∂t
= −i~k ·
= −i~k ×
= iω
Die Maxwell Gleichungen ergeben
~k · E
~
~k × E
~
~k · H
~
~k × H
~
= 0
~
= µ0 µr ω H
=
=
0
~
−0 r ω E
~ und H
~ ein orthogonales Rechtssystem bilden. ~k zeigt also in die gleiche
Das bedeutet, dass ~k, E
~
Richtung wie die uns schon bekannte Energiestromdichte S.
38 Ohne
polarisier- und magnetisierbares Material wird daraus c =
21
√ 1
,
0 µ0
die Vakuum-Lichtgeschwindigkeit.
~ (rot), dem magnetischen Feld H
~
Abbildung 13: Beziehungen zwischen dem elektrischen Feld E
~
(blau) sowie dem Wellenzahlvektor k (grau)
4.7.2
Kugelwellen
~ = ~0 ist durch
Eine weitere Lösung der Wellengleichung E
~ =E
~ 0 1 ei(ωt−kr)
E
r
gegeben. Da der Energiestrom durch jede Kugeloberfläche um den Ursprung gleich ist und eine sol~=E
~ ×H
~ entsprechend wie r−2 ab. Dies ist
che Fläche wie r2 ansteigt, fällt die Energiestromdichte S
−1
~
~
erfüllt, wenn die Felder E und H jeweils wie r abfallen. Mit dem Laplace-Operator in Kugelkoordinaten
1
∂f
1
∂
∂2f
1 ∂
2 ∂f
r
+ 2
sin ϑ
+ 2 2
∆f = 2
r ∂r
∂r
r sin ϑ ∂ϑ
∂ϑ
r sin ϑ ∂ϕ2
und der Anwendung auf die Kugelwelle
1 ∂
2 ∂ 1 i(ωt−kr)
~ 0 1 ∂ (1 + ikr)ei(ωt−kr) = −k 2 E
~
~
~
∆E = E0 2
r
= −E
e
r ∂r
∂r r
r2 ∂r
erhalten wir mit
4.7.3
1 ∂ ~
c2 ∂t2 E
2
~ dass die Wellengleichung erfüllt ist.
= − ωc2 E,
inhomogene Wellengleichung
~ an, so ergibt sich unter Verwendung
Wenden wir den Wellenoperator auf die Potentiale φ und A
der Definitionen der Potentiale und der Maxwell Gleichungen:
1
∂
ρext
1
1 ∂2
˙ ~ ~
~
~
~
~
− ∆ φ = 2 φ̈ + ∇ · A + ∇ · E =
φ̇ + ∇ · A +
φ =
c2 ∂t2
c
∂t c2
0 r
1 ∂2
~= 1A
~
~¨ − ∇(
~ ∇
~ · A)
~ +∇
~ × (∇
~ × A)
~
A =
−∆ A
c2 ∂t2
c2
1 ~˙ ~ ~ ~
1
1 ~
˙
~
~
~
~
~
= − 2 ∇φ̇ − 2 E − ∇(∇ · A) + µ0 µr j + 0 r µ0 µr E = −∇ 2 φ̇ + ∇ · A + µ0 µr~jext
c
c
c
Wählen wir die Lorentz-Eichung
1
~ ·A
~=0
φ̇ + ∇
c2
so nehmen die inhomogenen Wellengleichungen die folgende Form an:
φ =
ρext
0 r
~ =
A
µ0 µr~jext
22
5 Anwendungen
5.1 Elektrischer Widerstand
Wirkt eine Kraft F~ auf die Ladungsträger in einem Material, so stellt sich ein Gleichgewicht zur Reibungskraft ein und für die Geschwindigkeit ~v der Ladungsträger gilt
~v = β F~
wobei β die Beweglichkeit ist. Wenn Q die Ladung eines Ladungsträgers ist und n die Anzahldichte
~
der Ladungsträger, so gilt für die Ladungsdichte ρ = Qn und für die Stromdichte folgt mit F~ = QE,
~
wobei E das an das Material angelegte elektrische Feld ist
~ = σE
~
~j = ρ~v = Qnβ F~ = Q2 nβ E
Dabei ist σ = Q2 nβ die spezifische Leitfähigkeit. Dies ist das Ohm’sche Gesetz in mikroskopischer Form.
~
In einem Leiter mit der Querschnittsfläche A und der Länge l fließt also, wenn die Spannung U = E
l
~ angelegt wird, der Strom I = j A und es folgt
~ j l
~
l=
I = RI
U = E l =
σ
σA
l
Dabei ist R = σA
der elektrische Widerstand. Dies ist das Ohm’sche Gesetz in makroskopischer Form.
Die Leistung, die am Widerstand abfällt, ist
P = Ẇ =
U2
dW
Q̇ = U I =
= RI 2
dQ
R
5.2 Wechselstromkreise
Fließt durch eine Reihenschaltung aus einem Wiederstand R, einem Kondensator mit der Kapazität
C und eine Spule mit der Induktivität L der Wechselstrom
I = I0 eiωt
so setzt sich die Gesamtspanung U folgendermaßen zusammen:
1
Q
I = ZI
= R + i ωL −
U = RI + LI˙ +
C
ωC
1
1
Dabei ist Z = R + i ωL − ωC
die Impedanz. <(Z) = R heißt Wirkwiderstand und =(Z) = ωL − ωC
q
1 2
als Scheinwiderstand bezeichnet wird. Die SpanBlindwiderstand, während |Z| = R2 + ωL − ωC
nungsbilanz
Q
=U
LQ̈ + RQ̇ +
C
zeigt, dass dieser Schwingkreis sich beim Anlegen einer äußeren Spannung so verhält wie ein
getriebener, gedämpfter, mechanischer Oszillator mit mẍ + ρẋ + Dx = F . Dabei treten folgende
Analogien auf:
Schwingkreis
Ladung auf dem Kondensator
Strom durch den Widerstand
Ableitung des Stroms für die Spule
Induktivität der Spule
Widerstand
Kapazität des Kondensators
angelegte Spannung
Q
I = Q̇
I˙ = Q̈
L
R
C
U
mechanischer Oszillator
Dehnung der Feder
Geschwindigkeit für die Luftreibung
Beschleunigung der trägen Masse
Träge Masse
Reibungskoeffizient
Federkonstante
äußere Kraft
23
s
v = ṡ
a = v̇ = s̈
m
ρ
D
F
5.3 Induktion zwischen zwei Leiterschleifen
Wir betrachten zwei Stromschleifen, die durch die Kurven C1 und C2 dargestellt werden. Wir berech~ der ersten Stromschleife am Ort ~x2 . Die Orte ~x1 liegen auf der ersten Stromnen das Magnetfeld B
schleife.
I
d~x1
µ0
~
~
I
B =∇×
4π C1 |~x2 − ~x1 |
Der Fluss Φ durch die zweite Stromschleife ist
Φ=
Z
A2
~ ·B
~
dA
Daraus ergibt sich mit dem Satz von Stokes der Induktionskoeffizient zwischen den beiden Stromschleifen
I I
−Uind
Φ̇
µ0
d~x2 · d~x1
L12 =
=
=
˙
˙
4π C2 C1 |~x2 − ~x1 |
I
I
Hierbei kann man übrigens die Stromschleifen vertauschen, ohne das Ergebnis zu beeinflussen.
5.4 Wechselspannung am Transformator
Im Primärkreis des Transformators ist die Spannungsquelle Uext an die n1 Primärwindungen des Transformators angeschlossen. Der gesamte Ohm’sche Widerstand des Primarkreises ist im Widerstand R1
zusammengefasst. An die n2 Sekundärwindungen des Transformators ist der Verbraucherwiderstand
R2 angeschlossen. Die Spulen des Primär- und des Sekundärkreises sind über einen Weicheisenkern
verbunden. Seien L11 und L22 die Selbstinduktivitäten der Primär- bzw. der Sekundärspule und L12
Abbildung 14: Zur Schaltung des Transformators
bzw. L21 die Induktivitäten der Sekundär- auf die Primärspule und umgekehrt.
Dann ergeben sich für den Primär- und den Sekundärstromkreis die beiden Differentialgleichungen:
Uext
0
= L11 · I˙1 + L12 · I˙2 + R1 · I1
= L21 · I˙1 + L22 · I˙2 + R2 · I2
Gehen wir bei Uext von einer Wechselspannung mit der Amplitude U0 und der Frequenz ω - also Uext =
U0 · ei·ωt aus, so bieten sich für die Ströme I1 und I2 im Primär- bzw. Sekundärkreis die Lösungsansätze
I1 = I1 0 · ei·ω·t bzw. I2 = I2 0 · ei·ω·t an. Diese liefern beim Einsetzen (analog zum Aufstellen des Ausdrucks
für die Impedanz einer Schaltung):
U0
0
= (R1 + i · ω · L11 ) · I1 0 + i · ω · L12 · I2 0
= i · ω · L21 · I10 + (R2 + i · ω · L22 ) · I20
Diese beiden Gleichungen können verwendet werden, um Beziehungen zwischen der angelegten
Spannung und der Spannung im Sekundärkreis bzw. zwischen den entsprechenden Strömen zu erhalten.
24
• Eliminieren von I1 0 liefert:
U0 · i · ω · L21
=
⇒ I2 0
=
−ω 2 · L12 · L21 − (R1 + i · ω · L11 ) · (R2 + i · ω · L22 ) · I2 0
L21
· U0
−
(R1 · L22 + R2 · L11 ) − i · R1ω·R2
(Hierbei wurde ausgenutzt, dass Lij ∝ ni · nj .)
n2
21
Für R1 klein genug finden wir also (mit L
L11 = n1 ):
R2 · I2 0 = −
n2
· U0
n1
Die Spannung am Verbraucher ist also π-phasenverschoben gegenüber der Versorgungsspannung am Transformator und das Verhältnis der Spannungen entspricht dem Verhältnis der Windungszahlen.
• Betrachten wir dagegen nur die erste der beiden gefundenen Gleichungen, so erhalten wir:
I1 0 =
U0 − i · ω · L12 · I20
R1 + i · ω · L11
Ohne eingeschalteten Verbraucher R2 (⇒ I20 = 0) besteht I10 nur aus dem ersten Term, den wir
daher als den Leerlaufstrom I1 0L bezeichnen können. Dann erhalten wir für I1 0 :
I10
=
=
i · ω · L12 · I20 · (R1 − i · ω · L11 )
R12 + ω 2 · L211
2
ω · L12 · L11
i · ω · L12 · R1
I10 L −
· I20
+ 2
R12 + ω 2 · L211
R1 + ω 2 · L211
I10 L −
Für R1 klein genug ergibt sich nun (wieder mit der direkten Abhängigkeit der Induktivitäten von
den Windungszahlen):
n2
I1 0 = I1 0L −
· I2 0
n1
Bei Belastung des Transformators fließt also ein zusätzlicher Strom im Primärkreis, der in Phase
mit der angelegten Spannung U0 ist. Das Verhältnis zwischen diesem und dem Strom im Sekundärkreis ist umgedreht zu dem der entsprechenden Windungszahlen.
25