8. Bewegte Bezugssysteme
Werbung

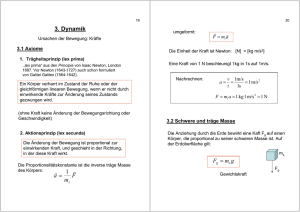
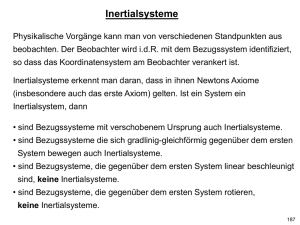
Mechanik – Bewegte Bezugssysteme 8. Bewegte Bezugssysteme 8.1. Vorbemerkungen − Die grundlegenden Gesetze der Mechanik haben wir bisher ohne Bezug auf ein spezielles Bezugssystem definiert. Grundgesetze sollen ja auch unabhängig vom Bezugssystem gelten! − Wir betrachten im Folgenden: · Bezugssysteme mit konstanter Relativgeschwindigkeit u << c · Linear beschleunigte Bezugssysteme · Rotierende Bezugssysteme − Die Relativitätstheorie ist nicht Gegenstand dieses Kapitels. 8.2. − − Bezugssysteme mit konstanter Relativgeschwindigkeit u << c − } < 10-4 ž c betrachtet werden nun die Systeme S und S‘: Ortsvektor in S‘: Ortsvektor in S: − n Beispiel: Mach-3-Düsenjäger 3600 km ž h-1 = 1 km ž s-1 Erdsatellit = 8 km ž s-1 u << c bedeutet also in der Regel keine ernste Einschränkung! r r′ r r r r r = r0 + u ⋅ t + r ′ r Transformation mit konstantem u ≡ Galilei-Transformation Geschwindigkeit in S‘: Geschwindigkeit in S: r v r v′ (1) ! r r d r0 d (u ⋅ t ) r& = + + r′ dt dt r r r =0 +u + r& ′ 47 Mechanik – Bewegte Bezugssysteme bzw. r v r r = v′ + u r p r r = p′ + u ⋅ m (2) Also einfacher additiver Zusatzterm, der Impulserhaltung nicht beeinträchtigt. − Beschleunigung in S‘: r a′ Beschleunigung in S: r a also r r d 2 r ′ dv ′ = dt dt 2 r 2r d r dv = 2 = dt dt r r dv′ du = + dt dt r dv ′ = +0 dt = r a r dv ′ r = = a′ dt (3) r F′ r r r = m ⋅ a = m ⋅ a ′ = F′ (4) ⇒ Alle Galilei-transformierten Systeme sind in der Beschreibung der physikalischen Gesetze äquivalent. Die Gesetze der klassischen Mechanik sind Galileiinvariant. Die Gesamtheit der Galilei-transformierten Systeme heißt Inertialsysteme. 8.3. − ! Linear beschleunigte Bezugssysteme r System S‘ bewege sich nun beschleunigt mit a s relativ zum S: Ortsvektor in S‘: Ortsvektor in S: r r′ r r r r as 2 r r = r0 + t + u ⋅ t + r ′ 2 − wir fragen nach den Beschleunigungen in beiden Systemen: − Beschleunigung in S‘: Beschleunigung in S: bzw. r a′ r a r = &r&′ r = &r& r r r d 2 r0 d 2 (u ⋅ t ) d 2 a s 2 &r& = 2 + + 2 t + r′ dt dt 2 dt 2 r r =0 +0 + as + a′ r a r r = a s + a′ r a′ r r = a − as (5) (6) 48 Mechanik – Bewegte Bezugssysteme − multipliziert mit m: r r r m ⋅ a′ = m ⋅ a − m ⋅ a s â â r r r F′ = F + Ftr r r Ftr = − ma s ... Trägheitskraft − Kraft in S‘: mit: (7) Die Trägheitskraft spürt man nur im beschleunigt bewegten System. Für sie ist dort keine materielle Ursache (wie z. B. Feder, Gravitation, Triebwerk) zu err kennen, sie rührt nur von a s her. Man muss sie aber berücksichtigen, damit im beschleunigten Bezugssystem (wo dieses Beschleunigung nicht existiert) "die Mechanik wieder stimmt". Ohne diese „Scheinkräfte“ wäre dies nicht der Fall. ⇒ Beschleunigte Bezugssysteme sind keine Inertialsysteme. Beispiel: startendes Flugzeug: 8.4. ruhender Beobachter Beobachter in Kabine → → ! n Triebwerk "schiebt" keine Ursache für die Kraft! Rotierende Bezugssysteme − Beobachter B (ruhend): − Beobachter A (mitbewegt): Für ihn ruht die Masse! Sie wird durch eine für ihn unerklärliche Kraft nach „außen“ gezogen, welche durch die Federkraft kompensiert werden muss, weil sonst die Masse an die Außenwand geschleudert würde. − Diese „unerklärliche Kraft“, die nur im rotierenden Bezugssystem wirkt, ist die Zentrifugalkraft. Sie ist betragsmäßig gleich der Zentripetalkraft (lt. Gl. (3 - 15)), r aber nach außen gerichtet (~ r ). r r FZF = mω 2 r Auf m wirkt ständig die Federkraft FF, die die Masse auf die Kreisbahn zwingt, indem sie eine ständige r Änderung der Richtung von v hervorruft (Zentripetalkraft, -beschleunigung (vgl. <3.6.>)). ! (8) 49 Mechanik – Bewegte Bezugssysteme Im allgemeinen Fall, d. h. „r nicht ⊥ ω“, erhält man: r r r r FZF = m ⋅ ω × ( r × ω) (8‘) Zentripetalkraft bewirkt eine Beschleunigung im Laborsystem, Zentrifugalkraft kompensiert im rotierenden System (wo es keine Bewegung gibt) die Federkraft. n Beispiel: Gezeitenkräfte − Erdrotation um sich selbst ist hier unerheblich, da sie die „Normalgestalt“ der Erde (Abplattung, usw.) bestimmt. − Erde und Mond rotieren um den gemeinsamen Schwerpunkt S, der noch innerhalb der Erde liegt: · · · · Für M kompensieren sich Anziehung durch den Mond und Zentrifugalkraft genau. Bei A ist Anziehungskraft kleiner und Zentripetalkraft größer ⇒ „Wasserberg“ Bei B ist Anziehungskraft größer und Zentripetalkraft kleiner ⇒ „Wasserberg“ Wenn „Anziehung des Mondes“ alleinige Ursache wäre, dürfte bei A kein Flutberg auftreten! − Wir kehren zur rotierenden Masse zurück und knipsen jetzt die Feder durch: − ruhender Beobachter : Masse fliegt geradlinig gleichförmig weiter (A‘, B‘, C‘, ...) 50 Mechanik – Bewegte Bezugssysteme − − bewegter Beobachter: Masse fliegt radial nach außen (A → A‘, B → B‘), da ja nun die Gegenkraft der Feder fehlt - zunächst! genauere Betrachtung: Masse fliegt nicht geradlinig, sondern die Bahnkurve ist im rotierenden Bezugssystem gekrümmt (C → C‘, D → D‘, ...) Im rotierenden Bezugssystem muss man die Krümmung der Bahnkruve auf eine Kraft zurückführen, damit die Mechanik wieder stimmt ⇒ Corioliskraft r r r Fc = 2m ⋅ (v′ × ω) r v ′ ... Geschwindigkeit im bewegten System! − ! (9) Bei einem „Schuss || zur Drehachse“ ist die Corioliskraft also Null. 51