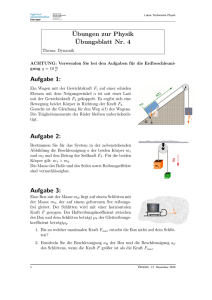
3. Dynamik 1 a F m = gm F
Werbung

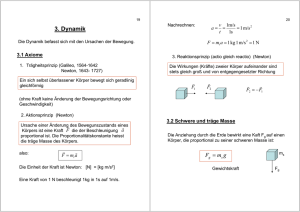
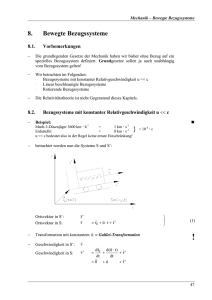
19 3. Dynamik 20 umgeformt: Ursachen der Bewegung: Kräfte 3.1 Axiome F = mt a Die Einheit der Kraft ist Newton: [N] = [kg m/s2] 1. Trägheitsprinzip (lex prima) „lex prima“ aus den Principia von Isaac Newton, London 1687. Vor Newton (1643-1727) auch schon formuliert von Galilei Galileo (1564-1642). Eine Kraft von 1 N beschleunigt 1kg in 1s auf 1m/s. Nachrechnen: Ein Körper verharrt im Zustand der Ruhe oder der gleichförmigen linearen Bewegung, wenn er nicht durch einwirkende Kräfte zur Änderung seines Zustands gezwungen wird. (ohne Kraft keine Änderung der Bewegungsrichtung oder Geschwindigkeit) 2. Aktionsprinzip (lex secunda) Die Änderung der Bewegung ist proportional zur einwirkenden Kraft, und geschieht in der Richtung, in der diese Kraft wirkt. Die Proportionalitätskonstante ist die inverse träge Masse des Körpers: 1 a= mt F a= v 1m/s = = 1 m/s 2 t 1s F = mt a = 1 kg 1 m/s 2 = 1 N 3.2 Schwere und träge Masse Die Anziehung durch die Erde bewirkt eine Kaft Fg auf einen Körper, die proportional zu seiner schweren Masse ist. Auf der Erdoberfläche gilt: ms Fg = ms g Fg Gewichtskraft 21 22 3.3 Vektorielle Addition von Kräften Dies bewirkt eine Beschleunigung a= Fg = mt ms g mt Kräft haben Richtung und Betrag. Mehrere an einem Punkt angreifende Kräfte werden vektoriell addiert: F Experimente zeigen, dass die schwere Masse tatsächlich gleich der trägen Masse ist a=g ⇒ F = F1 + F2 Hierbei gilt: F1 F2 F ≤ F1 + F2 Alle fallenden Körper beschleunigen mit g ! Experiment: Entkopplung von beschleunigter und Kraft erzeugender Masse Die Gesamtkraft ist immer kleiner oder gleich der addierten Einzelkräfte F Beispiele: spitzer Winkel: m2 Kraft F1 = m1g beschleunigt Masse m = m1 + m2 F flacher Winkel: F2 F ≈ F1 + F2 F1 F2 F << F1 + F2 Beschleunigung: Experiment: F m1 g a= = m m1 + m2 m1 Tabelle: m1 m2 a m0 m0 1/2 g 10 m0 m0 10/11 g m0 10 m0 1/11 g F1 Rechter Winkel wegen Pythagoras: F2 5 = 4 2 + 32 F3 hier: F = 4m0 g 5m0 g 3m0 g 2 2 F1 + F2 F1 23 3.4 Aufteilung von Kräften zurückgelegter Weg: Ein Kraftvektor kann immer als Summe von Kraftvektoren dargestellt werden, die an demselben Punkt angreifen: F1 F = F2 F = F1 + F2 Beispiel: schiefe Ebene m F h ⊥ F α l Fg = mg F m = Für kleine Winkel α gilt: Damit: a= sin α ≈ tan α = h l h g l Bei kleinen Steigungen ist die Beschleunigung gleich Erdbeschleunigung mal Steigung! Gewichtskraft wird aufgeteilt ⊥ und in anpressende Kraft F beschleunigende Kraft F („Hangabtriebskraft“) Es ist |F | = F = Fg sin α Beschleunigung: a= 24 1 s = sin α gt 2 2 mg sin α m = g sin α Entspricht freiem Fall mit verminderter Schwerkraft! 25 26 3.6 Kreisbewegung: Kräfte 3.5 Axiome (Fortetzung) z Kreisbewegung eines Körpers um den Ursprung. 3. Reaktionsprinzip (lex tertia) r Die Wirkung ist stets der Gegenwirkung gleich, oder die Wirkungen zweier Körper aufeinander sind stets gleich entgegengesetzter Richtung x F2 y a (t ) = vɺ (t ) = −ω 2 r (t ) Es wirkt also eine Kraft Fzp = ma = −mω 2 r Kraft gleich Gegenkraft: bei Wechselwirkungen zwischen zwei Körpern wirken Kräfte auf die Körper, welche gleich groß und entgegengesetzt sind F1 Die Beschleunigung ist Zentripetalkraft v F2 = − F1 Fzp Die Zentripetalkraft ist die Kraft, die notwendig ist, um die Bewegungsrichtung des Körpers ständig zu ändern. Allgemein: in einem (Inertial-) System ohne äußeren Kräfte gilt für die wirkenden Kräfte: N ∑ Fi = 0 „Mikroskopische“ Betrachtung dv i =1 v' F v ϕ Für sehr kleine Zeitintervalle dt ist die Richtung der Kraft konstant. Es wirkt die Beschleunigung 1 a= F m 27 28 3.7 Zentrifugalkraft Dies bewirkt eine Geschwindigkeitsänderung: 1 dv = adt = Fdt m Drehachse Fzf Führt zu neuer Geschwindigkeit: v ' = v + dv mit einem Winkel ϕ gegenüber Es gilt: dv 1 tan dϕ ≈ dϕ = = v m dϕ = also ⇒ F F dt dt = v mv Wagen auf Drehtisch, im System des Tischs betrachtet FZf = mω 2 r⊥ F dt mv Führt im rotierenden System zu „künstlicher Schwerkraft“ dϕ F ω= = dt mv ⇒ Mit v Im rotierenden System wirkt auf eine Masse eine Kraft, die radial nach außen gerichtet ist: F = mvω v = rω m Zentripetalkraft Fg 2 Kraft Beschleunigung v F = mrω = m r 2 F v2 2 a = = rω = m r Fges g Fges = Fg + Fzf = mg + mω 2 r⊥ = m( g + ω 2 r⊥ ) = mg ' Fzf g' Wie bei normaler Schwerkraft wirkt auf alle Körper eine Kraft proportional ihrer Masse (aber nicht in Richtung von g ) Die Richtung der „künstlichen Schwerkraft“ hängt von dem Abstand zu Drehachse ab! 29 30 Beispiel: Waschmaschine, Schleudergang Experiment: rotierende Flüssigkeit ω 1600 1 = 26.7 60s s 1 ω = 2π f = 168 s f = Flüssigkeitsoberflächen sind immer senkrecht ausgerichtet zu den wirkenden Kräften h ⇒ Oberfläche zeigt die Richtung der lokalen „Schwerkraft“ an Zentrifugalbeschleunigung damit: a = rω 2 = 7018 Flüssigkeit in rotierendem Gefäß Flüssigkeit α h aZf aZf rω 2 dh = tan α = = dr g g dh ω 2 = r dr g g r m = 715 g s2 (Menschen überleben kurzzeitig 20 g!) Berechnung der Steigung der Oberfläche α 1600 Umdrehungen/min: Radius: 0.25 m ⇒ h(r ) = h0 + ω2 2g Differentialgleichung! Die Zentrifugalkraft ist eine „Scheinkraft“, da sie nicht auf der Wechselwirkung zwischen Objekten beruht; sie hat aber die gleiche Wirkung wie eine „reale“ Kraft. Merkregel: bei Beschreibung der Kraft in einem rotierenden System • Beobachter ruht: Zentripetalkraft • Beobachte rotiert mit: Zentrifugalkraft r 2 Eine Flüssigkeit in einem rotierenden Gefäß bildet eine perfekt parabelförmige Oberfläche aus! 31 3.8 Bezugssysteme, Trägheitskräfte Das Koordinatensystem („Bezugssystem“) zur Beschreibung eines physikalischen Vorgangs ist frei wählbar. Der Wechsel zwischen verschiedenen Bezugssystemen geschieht durch Koordinaten-Transformation. 32 Die wirkenden Kräfte in gleichförmig zueinander bewegten Bezugsystemen sind identisch. Definition: Ein Inerialsystem ist ein Bezugssystem, in die Newton‘schen Axiome gelten (insbesondere Kraft=Gegenkraft, d.h. es gibt keine Scheinkräfte) 3.8.1 Galilei-Transformation Wechsel zwischen Bezugssystemen, die sich gleichförmig zueinander bewegen. z‘ z v r' r0 r = r0 + vt + r ' (r ' = r − r0 + vt ) vw Damit gilt für die Kräfte auf einen Körper mit Bahnkurve : F = ma = mrɺɺ = mrɺɺ ' = F ' Bahnkurve im System des Wagens: 1 r '(t ) = v0t + gt 2 2 0 = 0 v0t − 12 gt2 ɺɺ r = ɺɺ r' (diese ist gleich in beiden Bezugssystemen!) bzw. Kugel v0 ' rɺ = v + rɺ ' Für die Beschleunigung: r '(t ) Experiment: Für die Geschwindigkeit gilt: y‘ y r (t ) ⇒ alle gleichförmig relativ zu einem Inertialsystem bewegten Bezugssysteme sind auch Inertialsysteme Transformiert in das System des Hörsaals: r (t ) = 0 + vwt + r '(t ) = vwt 0 vwt 0 = 0 0 + v0t − 12 gt2 v0t − 12 gt2 33 Bahnkurve Wagen: vw t rw (t) = 0 + vw t = 0 0 Die x-Koordinaten von Kugel und Wagen sind zu jeder Zeit identisch ⇒ die Kugel trifft auf den Wagen auch im Bezugssytem des Hörsaals. (d.h. der physikalische Vorgang – Kugel entfernt sich vom Wagen und kehrt zu ihm zurück – wird in beiden Bezugssystemen korrekt beschrieben) 34 Auf einen Körper mit Masse m wirken also die Kräfte F = mrɺɺ(t ) = ma + ɺɺ r '(t ) = ma + F ' beziehungsweise F ' = F − ma Im beschleunigten Bezussystem wirkt eine zusätzliche Kraft in Gegenrichtung der Beschleunigung! (Schein- bzw. Trägheitskraft) 3.8.2 Linear beschleunigte Bezugssysteme Beispiel: Fahrstuhl z z‘ Die Bezugssysteme verändern ihre Relativgeschwindigkeit v0 + at Damit ist y‘ 1 r (t ) = r0 + v0t + at 2 + r '(t ) 2 y Für die Geschwindigkeit gilt: und die Beschleunigung: rɺ (t ) = v0 + at + rɺ '(t ) ɺɺ r (t ) = a + ɺɺ r '(t ) a g F' Bewegung des Fahrstuhls: 1 r (t ) = at 2 2 Kraft auf Person im Bezussystem des Fahrstuhls: 0 0 F = F ma = 0 + 0 −mg −ma Die Gewichtskraft ist scheinbar erhöht! 35 36 = R −1rɺ '+ ω × ( x ' ex ' + y ' ey ' + z ' ez ' ) 3.8.3 Rotierende Bezugssysteme z z‘ Richtung der Achsen des rotierenden Systems: y‘ ex ' , ey ' , ez ' x‘ y x = R −1rɺ '+ ω × R −1r ' Für die Beschleunigung gilt: ɺɺ r = ɺɺ x ' ex ' + ɺɺ y ' ey ' + ɺɺ z ' ez ' + 2( xɺ ' eɺx ' + yɺ ' eɺy ' + zɺ ' eɺz ' ) + x ' eɺɺx ' + y ' eɺɺy ' + z ' eɺɺz ' = R −1ɺɺ r '+ 2(ω × R −1rɺ ) + x '(ω × eɺx ' ) + y '(ω × eɺy ' ) + z '(ω × eɺz ' ) Transformation ins ruhende System: r = x ' ex ' + y ' ey ' + z ' ez ' = (ex ' , ey ' , ez ' ) ⋅ r ' = R −1r ' Also r = R −1r ' r ' = Rr Rotationsmatrix = R −1ɺɺ r '+ 2(ω × R −1rɺ ) + x '(ω × (ω × eɺx ' )) + y '(ω × (ω × eɺy ' )) + z '(ω × (ω × eɺz ' )) = R −1ɺɺ r '+ 2(ω × R −1rɺ ) + ω × (ω × eɺx ' ) R Falls das gestrichene System mit Kreisfrequenz ω rotiert, ist: eɺx ' = ω × ex ' (Bahngeschwindigkeit der Vektorspitze) Für die Geschwindigkeit im ruhenden System gilt damit: ⇒ Rrɺɺ = ɺɺ r '+ 2(ω × rɺ ') + ω × (ω × r ') rɺ = xɺ ' ex ' + yɺ ' ey ' + zɺ ' ez ' + x ' eɺx ' + y ' eɺy ' + z ' eɺz ' ⇒ ɺɺ r ' = Rrɺɺ − 2(ω × rɺ ') − ω × (ω × r ') = R −1rɺ '+ x '(ω × ex ' ) + y '(ω × ey ' ) + z '(ω × ez ' ) Beschl. im ruhenden System CoriolisBeschleunigung ZentrifugalBeschleunigung 37 38 Kräfte: F ' = RF − 2m(ω × rɺ ') − mω × (ω × r ') Im rotierenden System wirken zwei Trägheitskräfte: Zentrifugal- und Corioliskraft. ∆ϕ ω ∆v r1 r2 vr 3.8.4 Corioliskraft ∆v = vr sin ∆ϕ ≈ vr sin ∆ϕ = vrω∆t Anschauliche Herleitung: es gibt zwei Beiträge also einer Beschleunigung von ω r1 v1 r2 2. In der Zeit ∆t, in der man das Objekt von r2 nach r1 gebracht hat, hat sich das System um den Winkel ω∆t weitergedreht ⇒ die anfängliche Radialgeschwindigkeit vr ist nicht mehr parallel zum Radius, sondern weicht um den Winkel ∆ϕ=ω∆t davon ab. Dies führt zu einer zusätzlichen Bahngeschwindigkeit von v2 1. Orte im rotierenden System haben im ruhenden System eine Bahngeschwindigkeit rω. Bringt man ein Objekt von Radius r2 nach Radius r1, hat es eine höhere Bahngeschwindigkeit als die lokale Bahngeschwindigkeit bei r1 ⇒ es erfährt also eine scheinbare Beschleunigung a= Beide Beiträge zusammen ergeben: ac = 2vrω Geschwindigkeitsunterschied: ∆v = (r2 − r1 )ω = ∆r ⋅ ω Experiment: Pendel auf Drehtisch Falls der Vorgang in der Zeit ∆t geschieht, ergibt sich eine Beschleunigung: a= Triviale Behandlung: Pendel merkt nichts von der Drehung des Tisches ⇒ Pendelebene dreht im rotierenden System mit ωT ∆v ∆r ⋅ ω = = vrω ∆t ∆t Radialgeschwindigkeit ∆v = vrω ∆t ωT 39 Tatsächlich muß die Rückstellkraft des Pendels in y-Richtung berücksichtigt werden (reduziert ∆y): Betrachtung im rotierenden System: ∆y Pendelbewegung ohne Corioliskraft x(t ) = r0 cos ω p t Fc ωT 40 ∆y = r0π vx (t ) = −ω p r0 sin ω p t v In der Zeit τp verändert die Pendelebene ihren Winkel um ⇒ Corioliskraft Fc = −2m ω ×v T Pendel y vx 0 = −2m 0 × 0 0 ωT 0 2m ωT ωp r0 sin ωp t = 0 x ωT ωp ∆ϕ = Die Winkelgeschwindigkeit der Pendelebene ist also ωE = ω 2∆y = 2π T r0 ωp ∆ϕ τ = ωp ω 2π T = ωT 2π ωp Korrekte Winkelgeschwindigkeit auch bei Behandlung im rotierenden System! Vereinfacht gerechnet ergibt dies die Ablenkung: t v y (t ) = ∫ Fy m 0 τ p /2 ∆y = ∫ 0 dt = 2ωT r0 (1 − cos ω p t ) ω v y (t )dt = ωT r0τ p =r0 2π T ωp Experiment: Foucault-Pendel Erde ω Pendel α ωeff Breitengrad g Bei dem Versuch wirkt die auf g projizierte Winkelgeschwindigkeit ωeff = ω sin α 41 In Freiburg (α = 48°) dreht sich die Ebene des FoucaultPendel mit ωeff = 2π sin α = 54 ⋅10−6 s −1 24 ⋅ 3600 s ⇒ eine volle Umdrehung in 1.35 Tagen bzw. 0.18° pro Minute 11.1° pro Stunde 3.8.5 Einfluß der Corioliskraft auf die atmosphärische Luftbewegung Auf der Erdoberfläche bewegen sich die Luftmassen in Richtung von Bereichen niedriegen Drucks; durch die Corioliskraft werde sie auf der Nordhalbkugel „nach rechts“ abgelenkt, auf der Südhalbkugel „nach links“. ⇒ auf der Nordhalbkugel bewegen sich die Luftmasse um Tiefdruckgebiete entgegen des Uhrzeigersinns (von oben gesehen), T Erde