2.2 Grundgesetze der klassischen Mechanik
Werbung

2.2 Grundgesetze der klassischen Mechanik
2.2 Grundgesetze der klassischen Mechanik
Kinematik betrachtet nur die Bewegung von Körpern, nicht aber deren Ursache. Die Ursache
der Bewegung ist immer die Wechselwirkung zweier Systeme. Die Kraft ist die physikalische
Größe, die den Bewegungszustand des Körpers ändert.
2.2.1 Newtonsche Axiome
1. Trägheitsgesetz
Jeder Körper bewegt sich mit konstanter Geschwindigkeit ~v (kann auch ~v = 0
sein), wenn keine äußeren Kräfte auf ihn wirken.
2. Aktionsgesetz
Eine Kraft F~ , die auf einen Körper der Masse m wirkt beschleunigt diesen mit
der Beschleunigung ~a.
d
d~p
F~ = m~a = (|{z}
m~v ) = , p: Impuls
dt
dt
(2.58)
p
~
F~ = 0 ⇒ Trägheitsgesetz
(2.59)
3. Reaktionsgesetz (Wechselwirkungsprinzip)
actio = reactio
Wirkt ein Körper „1“ mit der Kraft F~12 auf einen anderen Körper „2“, dann wirkt
dieser umgekehrt mit der entgegengesetzen Kraft F~21 = −F~12
Beispiele:
Trägheitsgesetz:
Trägheit ist der Widerstand eines Körpers gegen Bewegungsänderung
⇒ träge Masse
Die Masse hat zusätzlich die Eigenschaft der „Schwere“. Gewichtskräfte sind
proportional zur Masse ⇒ schwere Masse
Experimentell sind träge und schwere Masse gleich!
Aktionsgesetz:
Kraft ist die zeitliche Änderung des Impulses p~ = m~v .
d~p
d
d~v
F~ =
= (m~v ) = m
+~v
dt
dt
dt
|{z}
~a
dm
~
dt
|{z}
(2.60)
=0 für konstante Masse
23
2 Mechanik
mA=0.3 kg
"
d
Er
e
24
mE=6·10 kg
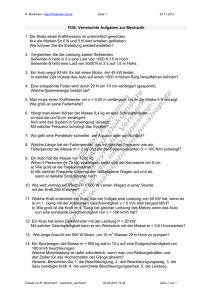
Abbildung 2.10: Wechselwirkungsprinzip am Beispiel Apfel und Erde.
Wechselwirkungsprinzip:
Anziehung zweier Massen, Erde (E), mE = 6 × 1024 kg und Apfel (A),
mA = 0.3 kg
F~EA = −FAE
⇔ mE~aE = −mA~aA
(2.61)
(2.62)
Betrag
z}|{
⇒ mE aE = −mA aA
mA
m
⇔ aE =
aA , aA = g = 9, 81 2
mE
s
m
⇒ aE = 4, 905 × 10−25 2
s
(2.63)
(2.64)
(2.65)
Falldauer:
1
sA = gt2A
2
r
2sA
⇔ tA =
g
(2.66)
(2.67)
Bewegung der Erde:
1 2sA
1
sE = aE t2A = aE
2
2
g
1 mA 2sA
⇔ sE =
g
2 mE g
mA
sA
⇔ sE =
mE
⇒ sE = 5 × 10−26 sA
(2.68)
(2.69)
(2.70)
(2.71)
d. h., die Erdbewegung ist vernachlässigbar. Aber: Bei Planetenbewegungen z.
B. vergleichbare Massen ⇒ Störung der Planetenbahnen.
24
2.2 Grundgesetze der klassischen Mechanik
Kraft:
Die Kraft ist eine vektorielle Größe deren Richtung parallel zur Beschleunigung ~a ist.
Einheit: 1
kg m
s2
, 1 N (Newton)
Impuls:
Die Bewegungsgröße eines Körpers ist der Impuls p.
p~ = m~v ; [
kg m
= Ns]
s
(2.72)
Kraftstoß:
Die Wirkung einer Kraft F~ ändert den Impuls:
Z
t2
F~ (t)dt =
Z
p2
p1
t1
dp = p~2 − p~1 = ∆~p
(2.73)
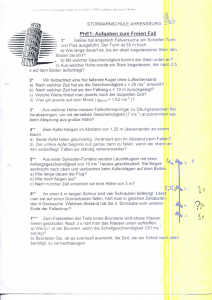
2.2.2 Addition von Kräften:
Kräfteparallelogramm:
y
~
F2
b
F
a
F1
x
Abbildung 2.11: Kräfteparallelogramm
25
2 Mechanik
F~ = F~1 + F~2
q
~
|F | = F~12 + F~22 + 2|F~1 ||F~2 | cos (∠F~1 , F~2 )
∠(F~1 , F~2 ) = β − α
in Komponenten:
Fx = F1 cos α + F2 cos β
Fy = F1 sin α + F2 sin β
q
|F~ | = Fx2 + Fy2
mehr als zwei Kräfte:
P
N
X
P Fjx
F~ =
F~i = F~1 + F~2 + . . . = P Fjy
i=1
Fjz
(2.74)
(2.75)
(2.76)
(2.77)
(2.78)
(2.79)
(2.80)
(2.81)
(2.82)
Kräftegleichgewicht, wenn die Gesamtkraft F~ = 0 ist.
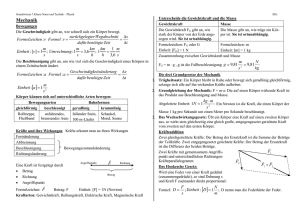
2.2.3 Raketengleichung als Folge des Aktionsgesetzes
Die Beschleunigung einer Rakete ist der besondere Bewegungsfall, bei dem die Masse des
Körpers nicht konstant ist.
Zeitpunkt:
m
v
t
t+dt
dm
T
Ù
m+dm
v+dv
Ù
v
T
dm =-dmT
Abbildung 2.12: Raketenflug per Impulsantrieb: Die Verbrennungsgase werden ausgestoßen.
26
2.3 Dynamik in bewegten Bezugssystemen
d~p = (m + dm)(~v + d~v ) + dmT ~vt − m~v
= md~v − dm (~vT − (~v + d~v ))
= md~v − ~vrel dm
mit
~vrel = ~vt − (~v + d~v )
dm
d~p
d~v
= F~a + F~schub
⇒ F~ =
= m − ~vrel
dt | {zdt} | {zdt}
~a
F
(2.83)
(2.84)
(2.85)
(2.86)
(2.87)
(2.88)
~schub
F
Impulserhaltungssatz:
Der Gesamtimpuls eines abgeschlossenen Systems von N Massepunkten ist konstant (es wirken nur innere Kräfte).
p~1 + p~2 + . . . + p~N =
N
X
p~i = konst.
(2.89)
i=1
2.3 Dynamik in bewegten Bezugssystemen
Inertialsystem:
Die Geschwindigkeit eines Körpers ist ohne Krafteinwirkung konstant (1. Newtonsches
Axiom)
Bewegen sich zwei Bezugssysteme mit einer konstanten Geschwindigkeit zueinander so
haben sämtliche Gleichungen in der Mechanik die gleiche Struktur → Galilei-invariant.
Beispiele für Nicht-Inertialsysteme:
Beschleunigtes Auto: Fahrer wird in den Sitz gedrückt (Scheinkraft)
Erde: Drehbewegung durch Erdrotation (Richtung von ~v nicht konstant und somit beschleunigt).
Gleichförmig rotierende Bezugssysteme:
Zusätzlich zu den physikalischen Kräften wirken Scheinkräfte, z. B. die Zentrifugalkraft bzw.
die Coriolis-Kraft.
Berechnung der Geschwindigkeit ~v ′ und der Beschleunigung ~a′ im rotierenden Bezugssystem
als Funktion von ~v und ~a im ruhenden Bezugssystem.
27