Autos der Zukunft - Universität Hamburg
Werbung

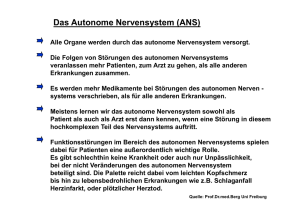
Autos der Zukunft Dr. Dominik Herrmann Universität Hamburg Folien zum Download: http://dhgo.to/autosderzukunft Themen des Vortrags Einblick in die Technik Safety (unbeabsichtigte Ereignisse) Security (beabsichtigte Angriffe) Herausforderung Haftung Gefahr für die Privatsphäre 2 Einteilung der deutschen Bundesanstalt für Straßenwesen (BASt) vollautomatisiert hochautomatisiert Fahrer muss nach Aufforderung Kontrolle übernehmen teilautomatisiert Längs- und Querführung Fahrer muss sofort eingreifen assistiertes Fahren Längsführung 3 Von Fahrassistenz-Systemen zu autonomen Fahrzeugen Komfortgewinn Sicherheitsgewinn Effizienzgewinn Flexibilitätsgewinn http://spectrum.ieee.org/static/the-self-driving-car; „Freie Fahrt in der digitalen Mobilität“, Grundsatzpapier des vzbv (9.2.2015) 4 Prototyp eines autonomen Fahrzeugs von Google http://econ.st/ZZBLzi 5 Autonome Fahrzeuge nehmen ihre Umgebung mittels verschiedener Sensoren wahr. Lidar GPS Radar Stereo-Kamera Ultraschall Zentralrechner Radar http://econ.st/ZZBLzi 6 Einige Hersteller setzen auf laser-basierte Technik (Lidar) zur Erfassung der Umgebung, andere auf Radar und Videokameras. https://www.youtube.com/watch?v=nXlqv_k4P8Q 7 Die Erkennung von Gefahren ist eine Frage von Wahrscheinlichkeiten. 100%-ige Sicherheit (Safety) ist erreichbar – aber auf Kosten des Komforts. Anteil der Situationen ERKENNUNG „normal“ „Gefahr“ REALITÄT „Gefahr“ „normal“ richtig positiv falsch negativ falsch positiv richtig negativ defensiver Schwellwert des Autos Wert des „Gefahr“-Sensors offensiver Schwellwert Technologische Innovation 8 Die Verkehrszeichenerkennung gelingt – unter guten Sichtverhältnissen – mittels maschineller Lernverfahren, etwa künstlichen neuronalen Netzen. „50“ nichts „50“ richtig positiv falsch negativ nichts REALITÄT ERKENNUNG falsch positiv richtig negativ J. Stallkamp, M. Schlipsing, J. Salmen, C. Igel, Man vs. computer: Benchmarking machine learning algorithms for traffic sign recognition, Neural Networks, Volume 32, August 2012, Pages 323-332, ISSN 0893-6080 9 Die eingesetzten Lernverfahren lassen sich allerdings in die Irre führen. Erkannte Ziffer Eingabedaten, die fälschlicherweise als Ziffer erkannt werden Nguyen A, Yosinski J, Clune J. Deep Neural Networks are Easily Fooled: High Confidence Predictions for Unrecognizable Images. In CVPR ’15, IEEE, 2015. 10 Dadurch könnten Störer gezielt das Verhalten eines autonomen Fahrzeugs manipulieren – nur eines der vielen Security-Probleme. Nguyen A, Yosinski J, Clune J. Deep Neural Networks are Easily Fooled: High Confidence Predictions for Unrecognizable Images. In CVPR ’15, IEEE, 2015. 11 Das Fahren „auf Sicht“ weist zahlreiche Einschränkungen auf. Detailliertes und präzises Kartenmaterial (im Zentimeterbereich) soll Abhilfe schaffen. http://www.wired.com/2012/01/ff_autonomouscars/ 12 Zusätzliche Vernetzung der Fahrzeuge erlaubt rechtzeitige Übermittlung von Gefahren; in Kombination mit Sensordaten höhere Zuverlässigkeit. https://www.car-2-car.org/index.php?id=196 13 Die Vernetzung verspricht Effizienzgewinne durch Stauvermeidung, höhere Fahrzeugdichte und geringeren Kraftstoffverbrauch. https://vimeo.com/37751380 14 Allerdings entstehen auch neue Angriffsmöglichkeiten, etwa wenn es gelingt, Nachrichten zu fälschen, um den Verkehr zu beeinflussen (Security). https://www.car-2-car.org/index.php?id=175 15 Abgesehen davon besteht die Gefahr von Sicherheitslücken und Schwachstellen, die unbemerkt aus der Ferne ausgenutzt werden können. http://www.bild.de/auto/auto-news/bmw-modelle/bmw-sicherheits-leck-luecke-software-connecteddrive-39563418.bild.html 16 Eine Frage der Moral: Umgang mit Extremsituationen http://people.virginia.edu/~njg2q/ethics.pdf 17 Sollen Hersteller programmatisch festlegen, welcher Radfahrer angefahren wird? Oder soll das Auto (wie der Mensch) zufällig reagieren? ohne Helm mit Helm höhere Chance beim Aufprall zu sterben höhere Chance zu überleben http://www.theguardian.com/environment/green-living-blog/2010/apr/07/david-cameron-cycles-without-helmet 18 Wie können Hersteller die Sicherheit ihrer Fahrzeuge im Straßenverkehr nachweisen? Wie können Nutzer bei einem Unfall ihre Unschuld beweisen? Fahrer haftet, wenn er gelenkt hat Hersteller haftet (immer?) < 50 Fahrstunden > 1.000.000 Kilometer ohne Unfall Reicht das? Gefahren-Situationen treten sehr selten auf und müssen daher gezielt trainiert werden. Wenn eine Situation nicht trainiert wurde, ist das Verhalten nicht präzise vorhersagbar. Wegen Vielzahl an Parametern lässt sich die strittige Situation u.U. nicht reproduzieren. http://fotos.autozeitung.de/938x704/images/hauptbild/2010/02/Top-10-Fahrschulautos.jpg 19 Automatisierte Fahrzeuge werden daher kontinuierlich Informationen zur Fahrt sammeln und (ggf. anonymisiert) an ihren Hersteller übermitteln. Zur Klärung der Haftung bei Unfällen: Rekonstruktion des Fahrverhaltens anhand aufgezeichneter Daten Vorteile für den Hersteller, der festlegt, welche Daten gespeichert werden Gefahr für die Privatsphäre: Identifizierung des Fahrers auch anhand anonymisierter Bewegungsdaten möglich; u.U. reichen bereits 4 Ortsangaben aus Verräterische Daten; wecken Begehrlichkeiten http://www.nature.com/srep/2013/130325/srep01376/full/srep01376.html, http://www.npa.go.jp/nrips/en/traffic/section3.html 20 Autos der Zukunft Vernetztes Fahren vs. automatisiertes Fahren Strittige Haftungsfragen bei Fahrfehlern (Safety) Zudem schwer aufklärbare Angriffe möglich (Security) Abhilfe durch intensive Datenerfassung und -überwachung: Verlust an Privatsphäre ist der Preis der Autonomie. Dr. Dominik Herrmann Kontakt: http://dhgo.to/svsdh