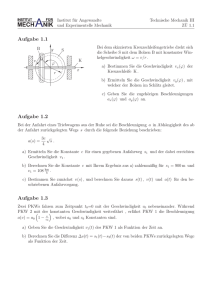
Blatt 5 - Institut für Nichtlineare Mechanik
Werbung

Institut für Angewandte
und Experimentelle Mechanik
Technische Mechanik III
(aer, ee) ZÜ 5.1
Aufgabe 5.1
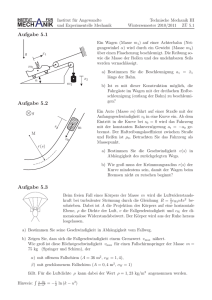
Ein Wagen (Masse m1 ) auf einer Achterbahn (Neigungswinkel α) wird durch ein Gewicht (Masse m2 )
über einen Flaschenzug beschleunigt. Die Reibung sowie die Masse der Rollen und des undehnbaren Seils
werden vernachlässigt.
x1
g
m1
x2
α
m2
b) Ist es mit dieser Konstruktion möglich, die
Fahrgäste im Wagen mit der dreifachen Erdbeschleunigung (entlang der Bahn) zu beschleunigen?
Aufgabe 5.2
g
s
m
M
v0
r(s)
a) Bestimmen Sie die Beschleunigung a1 = ẍ1
längs der Bahn.
Ein Auto (Masse m) fährt auf einer Straße mit der
Anfangsgeschwindigkeit v0 in eine Kurve ein. Ab dem
Eintritt in die Kurve bei s0 = 0 wird das Fahrzeug
mit der konstanten Bahnverzögerung at = −a0 gebremst. Der Haftreibungskoeffizient zwischen Straße
und Reifen ist µ0 . Betrachten Sie das Fahrzeug als
Massepunkt.
a) Bestimmen Sie die Geschwindigkeit v(s) in
Abhängigkeit des zurückgelegten Wegs.
b) Wie groß muss der Krümmungsradius r(s) der
Kurve mindestens sein, damit der Wagen beim
Bremsen nicht zu rutschen beginnt?
Aufgabe 5.3
Beim freien Fall eines Körpers der Masse m wird die Luftwiderstandskraft bei turbulenter Strömung durch die Gleichung R = 12 cW ρAv 2 beschrieben. Dabei ist A die Projektion des Körpers auf eine horizontale
Ebene, ρ die Dichte der Luft, v die Fallgeschwindigkeit und cW der dimensionslose Widerstandsbeiwert. Der Körper wird aus der Ruhe heraus
losgelassen.
a) Bestimmen Sie seine Geschwindigkeit in Abhängigkeit vom Fallweg.
b) Zeigen Sie, dass sich die Fallgeschwindigkeit einem Grenzwert vmax nähert.
Wie groß ist diese Höchstgeschwindigkeit vmax für einen Fallschirmspringer der Masse m =
75 kg (Springer und Schirm), der
α) mit offenem Fallschirm (A = 36 m2 , cW = 1, 4),
β) mit geschlossenem Fallschirm (A = 0, 4 m2 , cW = 1)
fällt. Für die Luftdichte ρ kann dabei der Wert ρ = 1, 23 kg/m3 angenommen werden.
R u du
1
2
Hinweis: k−u
2 = − 2 ln (k − u )
Institut für Angewandte
und Experimentelle Mechanik
Technische Mechanik III
(aer, ee) ZÜ 5.2
Lösung zur Aufgabe 5.1
x1
a) Zunächst werden die beiden Massen sowie
die Rolle, an der der Wagen hängt, freigeschnitten. Aus dem Schwerpunktsatz in x1 Richtung erhält man für den Wagen
S1
m1 g
m1 a1 = S1 − m1 g sin α ,
N2
(1)
N1
S2
und für die Rolle, an der der Wagen hängt
0 = −S1 + 2S2 .
S2
(2)
S1
Für die Masse erhält man aus dem Schwerpunktsatz in x2 -Richtung
m2 a2 = −S2 + m2 g .
x2
(3)
Es wird nun noch eine Beziehung zwischen
ẍ1 und ẍ2 benötigt. Dazu wird die mit dem
Wagen verbundene Umlenkrolle betrachtet,
um die Geschwindigkeiten v1 = ẋ1 und v2 =
ẋ2 in Beziehung zu setzen. In nebenstehender
Skizze bezeichnet MP den Momentanpol der
Rolle, für diesen gilt vMP = 0. Man erhält
also
v2 = 2v1 ,
S2
m2 g
MP
v1
v2
(4)
und durch Ableiten ergibt sich
a2 = 2a1 .
(5)
Durch Einsetzen und Umformen erhält man die Beschleunigung:
1
(2m2 − m1 sin α)g .
a1 =
m1 + 4m2
(6)
b) Es gilt: a1 = 3g. Durch Einsetzen in das Ergebnis aus Aufgabenteil a) erhält man:
1
(2m2 − m1 sin α) = 3.
(7)
m1 + 4m2
Dies wird nach m2 aufgelöst und durch m1 geteilt. Schließlich erhält man das Verhältnis
m2
3 + sin α
.
(8)
=−
m1
10
Da −1 ≤ sin α ≤ 1 und m1 , m2 > 0, existiert keine Lösung dieser Gleichung. Mit dieser
Konstruktion ist eine Beschleunigung von 3g nicht möglich.
Institut für Angewandte
und Experimentelle Mechanik
Technische Mechanik III
(aer, ee) ZÜ 5.3
Lösung zur Aufgabe 5.2
und dem Separationsprinzip folgt
a) Mit a(s) = v dv
ds
a(s) ds = v dv .
(1)
Da die Bahnverzögerung konstant at = −a0 ist, ergibt sich durch bestimmte Integration
Z v
Z s
ṽ dṽ
(2)
−a0 ds̃ =
v0
s0
1
−a0 (s − s0 ) = (v 2 − v02 )
2
(3)
und mit s0 = 0 schließlich der gesuchte Zusammenhang
q
v = ± v02 − 2a0 s .
(4)
Da die Anfangsgeschwindigkeit v0 positiv ist, lautet die gesuchte Lösung
q
v = + v02 − 2a0 s.
(5)
Alternativer Lösungsweg
Da die Bahnverzögerung und die Anfangsgeschwindigkeit gegeben sind, kann durch Integration v(t) bestimmt werden:
Z t
Z t
−a0 dτ = v0 − a0 t
(6)
at (τ ) dτ = v0 +
v(t) = v0 +
0
0
Erneute Integration liefert den Weg s(t):
Z t
Z t
1
(v0 − a0 τ ) dτ = s0 + v0 t − a0 t2
v(τ ) dτ = s0 +
s(t) = s0 +
2
0
0
(7)
Aus (6) erhält man die Zeit t in Abhängigkeit der Geschwindigkeit:
t=
v0 − v
.
a0
(8)
Einsetzen in (7) und Auflösen nach v ergibt schließlich mit s0 = 0 den gesuchten Zusammenhang
q
+
v = (−) v02 − 2a0 s .
(9)
mg
b) Die Betrachtung erfolgt in natürlichen Koordinaten, d.h. die horizontal auf das Fahrzeug (bzw. seine Reifen) wirkende Haftreibungskraft wird in Tangential- (Rt ) und Normalkomponente (Rn ) zerlegt. Die Abbildung
zeigt das freigeschnittene Fahrzeug mit den
angreifenden äußeren Kräften.
Rt
en
Rn
et
N
Institut für Angewandte
und Experimentelle Mechanik
Technische Mechanik III
(aer, ee) ZÜ 5.4
Der Schwerpunktsatz liefert für die horizontalen Kräfte
mat = Rt
man = Rn .
(10)
Die Tangentialbeschleunigung at ist konstant und gegeben, die Normalbeschleunigung an
ergibt sich in Abhängigkeit von Geschwindigkeit und Radius:
v2
.
r
Das Kräftegleichgewicht in vertikaler Richtung liefert für die Normalkraft
at = −a0
(11)
an =
N = mg .
(12)
Damit die Haftbedingung erfüllt ist, darf der Betrag der resultierenden horizontal angreifenden Kraft den Wert µ0 N nicht überschreiten, das heißt
|R| ≤ µ0 N .
(13)
Die resultierende Reibkraft R setzt sich aus den Normal- und Tangentialanteilen Rn und Rt
zusammen, die Haftbedingung ergibt also
q
(14)
Rt2 + Rn2 ≤ µ0 N , oder Rt2 + Rn2 ≤ µ20 N 2 .
Aus (10)-(14) erhält man
v4
≤ µ20 g 2 .
r2
Einsetzen von v(s) aus dem Aufgabenteil a) und Lösen für r liefert schließlich
a20 +
(15)
v 2 − 2a0 s
r(s) ≥ p0 2
.
µ0 g 2 − a20
(16)
Ist der Kurvenradius kleiner als der berechnete Wert, so rutscht das Auto aus der Kurve.
Lösung zur Aufgabe 5.3
a) An dem nach unten (positive Richtung) fallenden Körper greift außer der Gewichtskraft mg die nach oben
gerichtete Luftwiderstandskraft R an, so dass nach dem
Schwerpunktsatz gilt:
ma = mg − R ,
mit R =
1
cw ρAv 2
2
.
R
(1)
Nach der Beschleunigung a aufgelöst, ergibt sich:
a(v) = g −
cw ρA 2
v
2m
| {z }
(2)
γ
Gesucht ist jedoch v(x). Mit Hilfe der Kettenregel kann
in diesem Fall die Differentiation nach der Zeit in eine
Differentiation nach der Ortsvariable x überführt werden.
x
mg
Institut für Angewandte
und Experimentelle Mechanik
Mit a =
dv
dt
=
dv dx
dx dt
g − γv 2 = v
dv
= v dx
Technische Mechanik III
(aer, ee) ZÜ 5.5
und der Abkürzung γ =
cw ρA
2m
folgt
dv
dx
(3)
durch anschließende Trennung der Variablen erhält man:
v
dv
dx =
g − γv 2
1
ln
x=−
2γ
=⇒
Zx
dx̃ =
0
Zv
0
ṽ dṽ
1
=
2
g − γṽ
γ
Zv
0
ṽ dṽ
− ṽ 2
g
γ
v
γ 2
g
1
g
g
1
2 2
− ṽ = −
− v − ln
ln
= − ln 1 − v
γ
2γ
γ
γ
2γ
g
0
(4)
(5)
Auflösen nach v ergibt
γ 2
− 2γ x = ln 1 − v
g
γ
e−2γ x = 1 − v 2
g
r
r
g
2mg +
+
− cwmρA x
−2γ
x
v = (−)
(1 − e
) = (−)
1−e
γ
cw ρA
b) Für x → ∞ gilt e−2γ x → 0 und v strebt gegen den Grenzwert
r
2mg
vmax =
.
cW ρA
An dieser Stelle empfiehlt es sich, die Dimension des Ergebnisses zu überprüfen:
r
s
r
kg · sm2
mg
m2
m √
=
=
=
kg
2
cw ρA
s
s
1 · m 3 · m2
Mit den gegebenen Zahlenwerten ergibt sich
α) offener Fallschirm vmax = 4, 87 m/s = 17, 54 km/h,
β) geschlossener Fallschirm vmax = 54, 69 m/s = 196, 9 km/h.
(6)
(7)
(8)