7 Impuls und Mehrkörperprobleme
Werbung

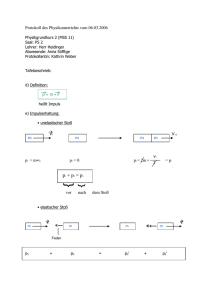
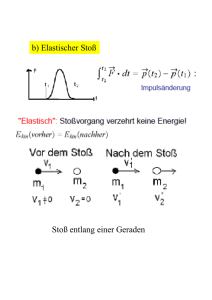
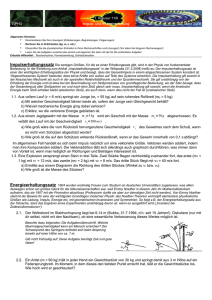
7 Impuls und Mehrkörperprobleme In den bisherigen Kapiteln wurden nur Bewegungsabläufe untersucht, an denen ein einziger Körper beteiligt war. Nun sollen Mehrkörperproblemen betrachtet werden. Dabei wird sich eine neue Größe, der Impuls, als besonders geeignet erweisen. 7.1 Impuls Der Impuls eines Körpers der Masse m ist definiert durch: p = mv (7.1) Der Impuls wächst also mit der Masse und der Geschwindigkeit des betrachteten Körpers und entspricht anschaulich seinem „Schwung“. Der Impuls p ist wie die Geschwindigkeit v eine vektorielle Größe. Die vorige Gleichung steht somit stellvertretend für die drei Gleichungen: px = mvx py = mvy pz = mvz (7.2) Differenziert man die Gl. (7.1) nach der Zeit, so erhält man unter Verwendung des zweiten Newton’schen Gesetzes: dv dp =m· = m · a = F (7.3) dt dt Die Änderung des Impulses eines Körpers pro Zeiteinheit ist also identisch mit der auf den Körper wirkenden resultierenden Kraft. d px d py d pz F = dp in Koordinaten: Fx = dt ; Fy = dt ; Fz = dt (7.4) dt Dies ist das zweite Newton’sche Gesetz in Impulsschreibweise. Ohne Krafteinwirkung bleibt der Impuls eines Körpers unverändert: F = 0 =⇒ dp = 0 =⇒ p = const. dt Wie ändert sich nun der Impuls eines Körpers, wenn eine Kraft auf ihn einwirkt? Um dies zu ermitteln, teilen wir die Einwirkungsdauer Δtges der Kraft in sehr viele, sehr kurze Fi . Die von Fi Zeitintervalle Δti auf und nennen die während Δti wirkende resultierende Kraft während Δti erzeugte Impulsänderung Δpi ergibt sich im Grenzfall Δti → 0 aus Gl. (7.4) zu Δp (7.5) Fi · Δti da F = lim Δpi = Δt→0 Δt Die gesamte Impulsänderung Δp erhält man, indem man alle diese Impulsänderungen Δpi addiert. Δp = ∑ Δpi = ∑ Fi · Δti i (7.6) i Im Grenzfall sehr vieler, sehr kurzer Zeitabschnitte Δti geht die Summe in ein Integral über. Für die Impulsänderung Δp ergibt sich: Δp = t2 t1 F dt d. h.: Δ px = t2 Fx dt; t1 Δ py = t2 Fy dt; t1 Δ pz = t2 Fz dt t1 (7.7) 80 7 Impuls und Mehrkörperprobleme s für das Integral lautet der allgemeine Zusammenhang: Mit der Bezeichnung Kraftstoß K Die Impulsänderung eines Körpers ist immer gleich dem Kraftstoß, den die resultierende Kraft auf ihn ausübt. Der Ausdruck für den Kraftstoß ähnelt dem für die Arbeit in Gl. (6.8). Man beachte jedoch, dass die Kraft bei der Berechnung des Kraftstoßes mit der Zeitdauer multipliziert wird, bei der Berechnung der Arbeit jedoch mit einem Wegstück. Dieser Unterschied macht sich auch in den Einheiten bemerkbar: [Arbeit] = N · m [Kraftstoß] = N · s (7.8) Jede Koordinate des Kraftstoßes kann grafisch veranschaulicht werden. Trägt man z. B. die x-Koordinate der Kraft wie in der folgenden Abbildung über der Zeit auf, so stellt die Fläche unter der Fx (t)-Kurve die x-Koordinate des Kraftstoßes dar. Fx Fx Δt 0 t 0 t1 t2 t Abb. 7.1 Veranschaulichung des Kraftstoßes Für eine zeitlich konstante Kraftkoordinate erkennt man die einfache Beziehung: Ksx = Fx · Δt 7.2 (7.9) Impulserhaltung bei Zweikörpersystemen mA Abb. 7.2 FA FB mB Kräfte beim Zweikörperproblem Wir betrachten nun ein System aus zwei Körpern A und B. Auf diese Körper sollen keine äußeren Kräfte Fext wirken. Nur die gegenseitigen WechselFA und FB seien vorhanden. Diese wirkungskräfte sind aber nach dem 3. Newton’schen Axiom bis auf das Vorzeichen gleich: FA + FB = 0 Beide Kräfte führen zu Impulsänderungen der jeweiligen Körper: FA = dpA , FB = dpB dt dt Folglich gilt auch nach Einsetzen in (7.10): d pges dpA dpB + = =0 mit Gesamtimpuls pges = pA + pB dt dt dt Da die zeitliche Ableitung des Gesamtimpulses null ist, gilt: pges = pA + pB = const. solange Fext = 0 (7.10) (7.11) (7.12) (7.13) Dies ist der Impulserhaltungssatz für ein Zweikörpersystem. Die Erhaltung des Gesamtimpulses gilt immer (in Abwesenheit äußerer Kräfte), unabhängig von der Natur der Kräfte, die zwischen den Körpern wirken. Sie hat zur Folge, dass für zwei verschiedene Zeitpunkte der gleiche Gesamtimpuls auftritt: pA (t1 ) + pB (t1 ) = pA (t2 ) + pB (t2 ) solange Fext = 0 (7.14) Die beiden Vektorgleichungen sind jeweils gleichbedeutend mit drei Gleichungen für die x-, y- und z-Koordinaten. 7.2 Impulserhaltung bei Zweikörpersystemen 81 Ohne Beweis sei erwähnt, dass die Impulserhaltung auch für Systeme gilt, die aus mehr als zwei Körper bestehen, immer unter der Voraussetzung des Fehlens äußerer Kräfte. Im Folgenden wird gezeigt, dass der Gesamtimpuls eines Systems von Teilchen nicht nur die Summe der Einzelimpulse ist, sondern als „Impuls der Schwerpunktsbewegung“ eine anschauliche Bedeutung besitzt. Der Schwerpunkt S zweier Körper ist gemäß Abb. 7.3 ein Punkt auf ihrer Verbindungslinie, der umso näher am Körper B liegt, je größer dessen Anteil an der Gesamtmasse ist. Sein OrtsvektorrS ist demgemäß definiert durch rS = rA + mB ·rAB mA + mB (7.15) Setzt man für den VerbindungsvektorrAB =rB −rA , so erhält man eine zweite Gleichung, die sich auch auf mehr als zwei Teilchen verallgemeinern lässt: rS = mArA + mBrB mA + mB allgemein: rS = mA mB r r mges A, B r rS r rA mB S r rB 0 Abb. 7.3 Zur Definition des Schwerpunktes ∑i (miri ) mges (7.16) Stellt man sich vor, dass die Gesamtmasse eines Systems in seinem Schwerpunkt vereinigt ist und sich mit diesem mitbewegt, so erhält man für den Impuls dieser Schwerpunktsbewegung pS = mgesvS = mgesr˙ S = mges mAr˙ A + mBr˙ B = pA + pB mges (7.17) Der Gesamtimpuls eines Systems ist der Impuls seiner Schwerpunktsbewegung. Damit lässt sich der Impulserhaltungssatz der Gl. (7.13) auch so formulieren: In Abwesenheit äußerer Kräfte ist die Schwerpunktsgeschwindigkeit vS eines Systems konstant; der Schwerpunkt bewegt sich also auf einer Geraden mit konstanter Geschwindigkeit. Beim Vorhandensein äußerer Kräfte Fext erhält das zweite Newton’sche Gesetz in Gl. (7.11) die Form Fext,A + FA = dpA , dt Fext,B + FB = dpB dt (7.18) Addiert man beide Gleichungen, so fallen die inneren Kräfte nach Gl. (7.10) weg; die äußeren Kräfte aber nicht, da sie keine im System angreifenden Reaktionskräfte besitzen. Man erhält: ∑ Fext = dpges dvS = mges = mgesaS dt dt (7.19) Diese Gleichung erhält man auch dann, wenn das System aus mehr als zwei Teilchen besteht. Das zweite Newton’sche Gesetz verknüpft bei einem Mehrkörpersystem die zeitliche Änderung des Gesamtimpulses (bzw. die Beschleunigung des Schwerpunktes) mit der Summe aller von außen einwirkenden Kräfte. Demzufolge bewegt sich der Schwerpunkt S unter dem Einfluss der äußeren Kräfte wie ein Körper der Gesamtmasse mges . 82 7 Impuls und Mehrkörperprobleme Beispiel 7.1 Zwei Gleiter auf der Luftkissenfahrbahn Auf einer waagrechten Luftkissenfahrbahn befindet sich eine gespannte Feder zwischen zwei Gleitern. B A Abb. 7.4 Experiment zur Impulserhaltung auf der Luftkissenfahrbahn Die beiden Gleiter sind anfänglich in Ruhe und werden durch einen Faden zusammen gehalten. Brennt man den Faden durch, setzen sich beide Gleiter aufgrund der Federkräfte in Bewegung, ohne dass äußere Kräfte den Versuchsablauf beeinflussen. Welche Aussagen über den Versuchablauf sind mit dem Impulssatz möglich? Als erstes sei betont, dass das Gesetz der Impulshaltung für jede Koordinatenachse getrennt angewendet werden kann. Da in der Richtung der Luftkissenfahrbahn keine bzw. nur sehr kleine äußere Kräfte wirken, folgt für diese Impulskoordinate: pA (t) + pB (t) = mA vA (t) + mB vB (t) = pges (Anfang) = 0 (1) Das Verhältnis der Massen der Gleiter bestimmt das Verhältnis der Geschwindigkeit: vB mA =− (2) mB vA Gleich träge Gleiter bewegen sich mit gleich großen, jedoch entgegengesetzten Geschwindigkeiten auseinander. Je ungleicher die beteiligten Massen sind, desto langsamer wird sich der Gleiter mit der größeren Masse entfernen, umso schneller der mit der kleineren Masse. Bei diesem Problem ist es sehr einfach, auch die Abstände der Gleiter von ihrem Startpunkt auszurechnen, weil nach der kurzen Beschleunigungsphase konstante Geschwindigkeiten auftreten: (mA vA + mB vB )Δt = mA (vA Δt) + mB (vB Δt) = 0 ΔxS = mA ΔxA + mB ΔxB = 0 (3) Der Schwerpunkt der beiden Gleiter bleibt wegen des Fehlens äußerer Kräfte ortsfest am Startpunkt der Gleiter. Beispiel 7.1 Beispiel 7.2 Der steinschleudernde Astronaut Ein Raumfahrer bewegt sich mit seinem Raumschiff (m0 = 1030 kg) nach dem Verbrauch des Treibstoffs mit der Geschwindigkeit v0 = 700 m/s fern von allen Himmelskörpern in Richtung Heimatplanet. Um diesem schneller näherzukommen, schießt er mit einer Schleuder eine Masse Δm von 30 kg mit der Relativgeschwindigkeit vR = 30 m/s nach hinten ab. Welche Geschwindigkeit v1 hat das Raumschiff nach dem Abschuss? Lösung: Der Gesamtimpuls p ist konstant, weil fern von allen Himmelskörpern keine (oder nur sehr kleine) äußere Kräfte auf das Raumschiff einwirken: p = const. = m0v0 (1) Nach dem Abwurf fliegt das Raumschiff mit der Masse m0 − Δm und der Geschwindigkeit v1 weiter. Der abgeworfene Körper mit der Masse Δm besitzt die Geschwindigkeit v0 + vR . m0v0 = (m0 − Δm)v1 + Δm(v0 + vR ) Die gesuchte Geschwindigkeit ergibt sich daraus: Δm v1 = v0 − · vR m0 − Δm (2) (3) 7.3 Stöße Mit den angegebenen Werten ergibt sich für die Geschwindigkeit |v1 |, da (−vR ) und v0 dieselbe Richtung haben: m 30 m · 30 |v1 | = 700 + s 1000 s m m m = 700 + 0,9 = 700,9 (4) s s s Der Astronaut kommt nur geringfügig schneller voran. Er sollte seine Energien für nützliche Dinge aufsparen. Beispiel 7.2 7.3 Stöße Ein wichtiges Anwendungsgebiet der Impulserhaltung bei Vielkörperproblemen bilden die Stöße. Wir werden uns im folgenden der Einfachheit halber auf Stöße beschränken, an denen zwei Körper beteiligt sind. Wir bezeichnen Vorgänge als Stöße, bei denen zwischen den betrachteten Körpern kurzzeitig sehr große Kraftspitzen auftreten. Im Vergleich dazu können etwaige äußere Kräfte während der Zeitdauer des Stoßes kaum eine Wirkung auf die Stoßpartnern ausüben. Diese Annahme ist gleichbedeutend mit dem Verschwinden von äußeren Kräften. Über die Herkunft der Kräfte, die während des Stoßes auftreten, müssen wir keinerlei Aussagen machen. Es können somit Autounfälle, der Aufschlag eines Tennisballes, die Kollision von Himmelskörpern oder auch auf mikroskopischer Ebene die Stöße zwischen Atomen und Elementarteilchen untersucht werden. Bei all diesen Problemen ist das Gesetz von der Erhaltung des Gesamtimpulses anwendbar. Unterscheiden können wir die Stöße danach, ob die mechanische Energie Wkin +Wpot erhalten bleibt. Elastische Stöße Bei elastischen Stößen bleiben die mechanische Gesamtenergie und der Gesamtimpuls erhalten. Der Stoß zwischen Billardkugeln ist ein Beispiel, das sich diesem Idealbild weit nähert. Es muss jedoch festgehalten werden, dass es auf makroskopischer Ebene keinen vollständig elastischen Stoß gibt. Jeder reale Stoß ist mit Energieverlusten verbunden. Auf mikroskopischer Ebene gibt es jedoch bei Stößen zwischen Atomen und anderen Teilchen durchaus elastische Stöße. Inelastische Stöße Alle Stöße, bei denen die mechanische Gesamtenergie Wkin + Wpot nicht erhalten bleibt, heißen inelastisch. Bei ihnen ist nur der Gesamtimpuls eine Erhaltungsgröße. Der Stoß eines Gummiballes gegen eine Wand, bei dem der Ball mit kleinerer Geschwindigkeit von der Wand reflektiert wird, ist ein Beispiel für einen inelastischen Stoß. Wenn zwei Körper zusammenstoßen, nach dem Stoß zusammenkleben und sich mit gleicher Geschwindigkeit weiterbewegen, reden wir vom total inelastischen Stoß. Der Zusammenstoß eines Meteoriten mit der Erde fällt in diese Kategorie. Elastische Stoßprozesse In diesem Abschnitt wollen wir elastische Stöße von mA mB zwei Körpern behandeln, bei denen die Bewegung in einer Koordinatenrichtung abläuft. Zwei Körper der MasvA vB sen mA und mB stoßen auf einer geraden Bahn aufeinander. Eine Realisierung dieses Stoßvorganges ist auf Abb. 7.5 Stoß von zwei Gleitern auf einer waagrechten Luftkissenfahrbahn einer waagrechten Luftkissenfahrbahn mit zwei Gleitern möglich. Gesamtenergie und Gesamtimpuls in Bahnrichtung sind dabei Erhaltungsgrößen. Die Geschwindigkeiten vor bzw. nach dem Stoß werden mit v bzw. u bezeichnet. Sie sind bei einer Bewegung nach links negativ. 1 1 1 1 mA vA2 + mB vB2 = mA u2A + mB u2B Energieerhaltung (EE) 2 2 2 2 mA vA + mB vB = mA uA + mB uB Impulserhaltung (IE) 83 84 7 Impuls und Mehrkörperprobleme Zur Berechnung der Geschwindigkeiten nach dem Stoß wird folgendermaßen vorgegangen: In beiden Gleichungen werden die Größen nach ihrer Zugehörigkeit zu den Körpern A und B sortiert. mA (vA2 − u2A ) = mB (u2B − vB2 ) mA (vA + uA )(vA − uA ) = mB (uB + vB )(uB − vB ) (EE) mA (vA − uA ) = mB (uB − vB ) (7.20) (IE) (7.21) Durch Division der letzten beiden Gleichungen ergibt sich: vA + uA = uB + vB (7.22) Diese Gleichung kann nach uB aufgelöst und in den Impulssatz eingesetzt werden: uB = vA + uA − vB (7.23) Damit gibt es nur noch eine Unbekannte in der Impulsgleichung, nämlich die Geschwindigkeit uA : uA = mA − mB 2mB vA + vB mA + mB mA + mB (7.24) Auf ähnliche Weise finden wir für die Geschwindigkeit des Körpers B nach dem Stoß: uB = 2mA mB − mA vA + vB mA + mB mA + mB (7.25) Betrachten wir als einfachste Anwendung den Spezialfall: mA = mB . Dieser Fall entspricht dem Stoß eines Gleiters auf der Luftkissenfahrbahn gegen einen zweiten Gleiter gleicher Masse. Die Geschwindigkeiten nach dem Stoß sind: uA = vB uB = vA (7.26) Die beteiligten Stoßpartner haben ihre Geschwindigkeiten getauscht. Ist z. B. der Körper B anfänglich in Ruhe, so ruht nach dem Stoß der Körper A. Betrachten wir den Fall, dass ein sehr schwerer Körper A mit einem leichten Körper B zusammen trifft (mA mB ), so können wir folgende näherungsweise gültigen Beziehungen aufstellen: uA ≈ vA uB ≈ 2vA − vB (7.27) Der massive Körper A behält unbeeinflusst vom Stoß seine Geschwindigkeit bei. Der leichte Körper B verändert seine Geschwindigkeit in Abhängigkeit von den Geschwindigkeiten vor dem Stoß. Ruht der leichte Stoßpartner vor dem Stoß (vB = 0 ), so bewegt er sich nachher mit der doppelten Geschwindigkeit uB = 2vA der großen Masse. Trifft dagegen der leichte Körper auf einen sehr schweren, ruhenden Körper (z. B. eine Wand, vA = 0), so wird er von dieser reflektiert. Das Vorzeichen der Geschwindigkeit von Körper B kehrt sich um. Auf die Wand wird der Impuls mA uA = 2mB vB übertragen, wegen ihrer großen Masse ist die übertragene Geschwindigkeit aber sehr klein! Beispiel 7.3 Fall mit anschließendem Stoß von zwei Kugeln Ein Ball A fällt aus der Höhe h zu Boden. Auf ihm liegt ein kleinerer Ball B mit sehr viel kleinerer Masse: mB mA . Beide Bälle beginnen den freien Fall zeitgleich und erfahren Stöße mit dem Boden beziehungsweise untereinander. Um welche Höhe h∗ steigt der kleine Ball nach seinem Stoß mit Ball A? Alle Stöße verlaufen elastisch. 7.3 Stöße 85 Lösung: B Der Bewegungsablauf ist gekennzeichnet durch das Auftreten von zwei Stößen in zeitlicher Folge. Zuerst stößt der schwere Ball A auf den Boden (seine Geschwindigkeit nach diesem Stoß sei vA ), um anschließend einen Stoß mit dem leichten Ball B zu erfahren. Beim ersten Stoß wird die Geschwindigkeit des Balles A umgekehrt: vA = −vA A h h vB (1) v′A An dieser Geschwindigkeit ändert sich wegen des großen Massenunterschiedes auch nach dem zweiten Stoß nichts. Abb. 7.6 Fall mit Stoß von zwei Bällen Der kleine Ball B besitzt vor seinem ersten Stoß wegen der gleichen Fallhöhe die gleiche Geschwindigkeit wie der große Ball: (2) vB = vA Im Moment dieses Stoßes ist der große Ball bereits im Steigen begriffen. Die Geschwindigkeit des kleinen Balles uB nach dem Stoß kann mit Gleichung (7.27) bestimmt werden: uB ≈ 2vA − vB uB ≈ −2vA − vB = −3vB (3) Der kleine Ball erhält im Vergleich mit dem üblichen freien Fall und anschließender Reflexion den dreifachen Betrag der Geschwindigkeit. Aus dem Energiesatz folgt, dass der Ball B um das neunfache der Fallhöhe h ansteigt. 1 1 1 mg · h∗ = m · u2B = m · (3vB )2 = 9 · ( m · vB2 ) = 9 · (mg · h) (4) 2 2 2 Beispiel 7.3 Zweidimensionaler Stoß Mit unseren Kenntnissen ist es jetzt möglich, auch ideal elastische Stöße zu untersuchen, die in einer Fläche ablaufen. Wir untersuchen den schrägen Stoß eines Körpers gegen eine Wand. Wenn die Kraft, die die Wand dabei auf den Körper ausübt, senkrecht zu ihrer Oberfläche wirkt, die Kraftkoordinate parallel zur Wand also verschwindet, so muss nach Gl. (7.7) die Impuls- und damit auch die Geschwindigkeitskoordinate parallel zur Wand erhalten bleiben. Aus der Erhaltung der kinetischen Energie folgt dann, dass die Geschwindigkeitskoordinate senkrecht zur Wand nur ihr Vorzeichen ändern kann. Die Auswirkungen des Stoßes auf die Koordinaten der Geschwindigkeit senkrecht und parallel zur Wand sind deshalb: u⊥ = −v⊥ u = v v α α u Abb. 7.7 Elastischer Stoß gegen eine Wand (7.28) Ein Körper, der unter dem Winkel α zum Lot auf eine Wand trifft, besitzt nach dem Stoß den gleichen Winkel α zum Lot. Dieser Sachverhalt wird als Reflexionsgesetz bezeichnet. Für mechanische Vorgänge, z. B. Stöße von Billardkugeln an der Bande, ist dieser Satz jedoch häufig nicht erfüllt, da Kräfte parallel zur Bande wirken und die Billardkugel in Drehung versetzen. Die Kunst des Billardspielens besteht ja gerade darin, der Kugel so einen Effet zu geben, dass die einfachen Gesetze der Mechanik nicht gelten. Ferner sind reale Stoßvorgänge, wie bereits 86 7 Impuls und Mehrkörperprobleme erwähnt wurde, nicht vollständig elastisch. Auch aus diesem Grunde sind daher Abweichungen vom Reflexionsgesetz zu erwarten. Inelastische Stoßvorgänge Beim total inelastischen Stoß zweier Körper bewegen sich diese nach dem Stoß mit der gleichen Geschwindigkeit u weiter. Das Gesetz der Impulserhaltung lautet dann: mA · vA + mB · vB = (mA + mB ) · u und somit gilt: u = mA · vA + mB · vB mA + mB (7.29) Die kinetischen Energien vor bzw. nach dem Stoß lauten bei diesem Stoßvorgang: 1 1 Wkin (t1 ) = mA · vA2 + mB · vB2 2 2 2 1 1 mA · vA + mB · vB 2 Wkin (t2 ) = (mA + mB )u = 2 2 mA + mB Der Energieverlust |ΔW | = Wkin (t1 ) − Wkin (t2 ) beim total inelastischen Stoß ist daher: mA · mB (vA − vB )2 |ΔW | = 2(mA + mB ) (7.30) Dieser mechanische Energieverlust wird bei makroskopischen Stoßvorgängen in Verformungs- und Erwärmungsenergie der Stoßpartner umgewandelt. Stößt ein Körper total inelastisch gegen einen ruhenden Körper (vB = 0), so ist das Verhältnis der kinetischen Energien vor und nach dem Stoß nur noch massenabhängig: mA Wkin (t2 ) = 1 (7.31) Wkin (t1 ) mA + mB Das Verhältnis des Energieverlusts |ΔW | zur anfänglich vorhandenen kinetischen Energie Wkin (t1 ) wird in diesem Fall: mB |ΔW | = 1 (7.32) Wkin (t1 ) mA + mB Bei gleichen Massen mA und mB geht die Hälfte der kinetischen Energie Wkin (t1 ) verloren. Beispiel 7.4 Ballistisches Pendel l Δh α mK m Ein ballistisches Pendel wird zur Geschwindigkeitsmessung von Pistolenkugeln verwendet. An einer dünnen Stange der Länge l befindet sich ein Auffänger der Masse m. Eine Pistolenkugel der Masse mK wird waagrecht in den Auffänger geschossen und bleibt dort stecken. Das Pendel wird ausgelenkt. Welcher Zusammenhang besteht zwischen dem größten Auslenkwinkel und der Geschwindigkeit? Abb. 7.8 Ballistisches Pendel Lösung: Das ballistische Pendel kann für die Zeitdauer des Abbremsens der Pistolenkugel als frei von äußeren Kräften in waagrechter Richtung angesehen werden. Aus diesem Grund bleibt der Impuls in waagrechter Richtung erhalten. 7.4 Zusammenfassung 87 Für die Geschwindigkeit des Auffängers und der Kugel gilt daher nach dem Stoß: mK u= vK (1) m + mK Mit dem Energiesatz kann ein Zusammenhang zwischen der Geschwindigkeit u und der größten Anhebung Δh hergestellt werden: 1 (2) (m + mK ) · u2 = (m + mK ) · g · Δh. 2 Geometrisch ist die Höhe Δh mit dem Winkel durch folgende Beziehung verknüpft: Δh = l − l cos α = l · (1 − cos α ) (3) Damit ergibt sich für die gesuchte Geschwindigkeit vK : m + mK vK = 2 · g · l(1 − cos α ) mK (4) Beispiel 7.4 Prallen zwei Körper mit entgegengesetzten, jedoch betragsmäßig gleichen Geschwindigkeiten vA = −vB total inelastisch zusammen, so nehmen der Energieverlust und die verbleibende kinetische Energie im Vergleich zur Anfangsenergie folgende Werte an: mA mB |ΔW | =4 1 Wkin (t1 ) (mA + mB )2 2 mA − mB Wkin (t2 ) = 1 Wkin (t1 ) mA + mB Bemerkenswert ist an diesen Beziehungen, dass für gleiche Massen mA = mB die gesamte kinetische Energie Wkin (t1 ) in Verlustenergie |ΔW | übergeführt wird. Autofahrer sehen deutlich die für sie in einem Frontalzusammenstoß schlimmen Folgen. Die Elementarteilchenphysiker hingegen nutzen diesen Effekt aus und lassen subatomare Teilchen frontal aufeinanderprallen, damit möglichst viel Energie |ΔW | zur Anregung der Stoßpartner und damit zur Produktion neuer Teilchen(-masse) zur Verfügung steht. Bei anderen als total inelastischen Stößen liegt der Energieverlust |ΔW | zwischen dem durch Gl. (7.30) gegebenen größten Wert und null: mA mB 0 |ΔW | (vA − vB )2 (7.33) 2(mA + mB ) 7.4 Zusammenfassung Der Impuls p eines Körpers der Masse m und der Geschwindigkeit v ist definiert als: p = m · v (7.34) Das zweite Newton’sche Gesetz lautet in Impulsschreibweise : F = dp (7.35) dt Die von der resultierenden Kraft F erzeugte Impulsänderung Δp ist gleich ihrem Kraftstoß: Δp = t2 F dt (7.36) t1 Der Gesamtimpuls von mehreren Körpern pges ist eine Erhaltungsgröße (d. h. er ist konstant), falls keine äußeren Kräfte einwirken. Für ein Zweikörpersystem lautet der Impulserhaltungssatz für 88 7 Impuls und Mehrkörperprobleme beliebige Zeiten t1 und t2 : pA (t1 ) + pB (t1 ) = pA (t2 ) + pB (t2 ) = pges = const. falls Fext = 0 (7.37) Gleichwertig mit dem Impulserhaltungssatz ist die Aussage, dass die Schwerpunktgeschwindigkeit vS in Richtung und Betrag unverändert bleibt. Der Schwerpunktsvektor eines Systems aus zwei Körpern lautet: rS = mArA + mBrB mA + mB (7.38) Der Schwerpunkt S eines Vielkörpersystems bewegt sich unter dem Einfluss äußerer Kraft wie ein Körper der Gesamtmasse M, die im Schwerpunkt konzentriert ist. dvS dpS (7.39) ∑ Fext = dt = M dt = MaS Bei elastischen Stößen gilt das Gesetz der mechanischen Energieerhaltung. Für zwei Körper A und B, die einen Stoß in einer Koordinatenrichtung ausführen, sind die Geschwindigkeiten nach dem Stoß in folgender Weise von den Anfangsgeschwindigkeiten abhängig: mA − mB 2mB uA = vA + vB mA + mB mA + mB 2mA mB − mA uB = vA + vB mA + mB mA + mB Geschwindigkeiten sind dabei negativ, wenn die Bewegung entgegen der gewählten positiven Koordinatenrichtung verläuft. Inelastische Stöße sind durch das Fehlen der mechanischen Energieerhaltung charakterisiert. Bei total inelastischen Stößen haben beide Körper nach dem Stoß die gleiche Geschwindigkeit u: m v + mBvB u = A A (7.40) mA + mB 7.5 7.1 Aufgaben Ein Wagen der Masse m1 = 24 kg rollt reibungslos eine schiefe Ebene der Höhe h = 1,8 m hinunter und stößt am Fußpunkt total inelastisch mit einem Körper der Masse m2 = 16 kg zusammen. Wie weit wird der Körper 2 infolge des Stoßes verschoben, wenn seine Reibungszahl μ 2 = 0,15 beträgt? 7.2 Ein Klotz der Masse m1 = 2,4 kg wird durch eine Feder (D = 6000 N/m), die anfänglich um x = 25 cm zusammengedrückt war, auf einer ebenen Fläche weggeschleudert. Nach einem Gleitweg s = 5 m stößt der Körper 1 elastisch mit einem Klotz der Masse m2 = 3,8 kg zusammen. In welchem Abstand voneinander bleiben die beiden Klötze liegen? Der Reibungskoeffizient ist für beide Körper μ = 0,6. 7.3 Ein Pendel der Länge l = 2 m und der Masse m1 = 2 kg wird um 70◦ nach links aus der Ruhelage ausgelenkt und losgelassen. Es stößt elastisch mit einem zweiten Pendel beim Durchgang der Ruhelage zusammen und erreicht nach dem Stoß links eine maximale Auslenkung von 45◦ . Gesucht sind die Masse m2 des Pendels 2 und seine maximale Auslenkung nach dem Stoß. 7.4 In einen Waggon der Masse m = 10 t, der mit v = 1 m/s fährt, fallen von oben 15 t Koks aus einer Höhe von 4 m. Mit welcher Geschwindigkeit fährt der Waggon weiter? 7.5 Aufgaben 7.5 Ein Güterwagen der Masse m = 20 t prallt auf einen stehenden Zug, der aus 10 gleichen Waggons besteht, mit 18 km/h auf. Was geschieht, wenn 1. die 10 Wagen nicht gekuppelt sind, 2. die 10 Wagen gekuppelt sind und die Stöße bei 1. und 2. elastisch erfolgen, 3. die 11 Wagen eine automatische Kupplung haben, die beim Stoß automatisch einrastet? Wo ist die restliche kinetische Energie geblieben? 7.6 Drei Kugeln, deren Massen sich wie 1 : 1/2 : 1/4 verhalten, sind nebeneinander aufgehängt. Nach Auslenken der ersten Kugel fällt diese mit der Geschwindigkeit v1 = 2 m/s gegen die nächste Kugel. Mit welcher Geschwindigkeit u3 fliegt die letzte Kugel zur Seite? Die Stöße erfolgen elastisch. 7.7 Von einem anfänglich ruhenden Raumfahrzeug mit der Anfangsmasse m0 = 1000 kg werden nacheinander Gegenstände mit der Relativgeschwindigkeit u = 10 m/s (zum Fahrzeug) in die gleiche Richtung weggeworfen. Nach dem ersten Wurf besitzt der Raumkörper die Masse m1 = 3/4 · m0 , nach dem zweiten Wurf die Restmasse m2 = 9/16 · m0 . Wie groß ist die Geschwindigkeit des Raumkörpers nach dem zweiten Wurf? 7.8 Ein Fahrzeug A fährt mit der Geschwindigkeit vA = 72 km/h auf einen stehenden Wagen B auf. Nach dem Zusammenstoß rutschen die beiden Fahrzeuge ineinander verkeilt noch die Strecke x = 50 m bei einem für beide Fahrzeuge gleichen Reibungskoeffizienten μ = 0,01 weiter. Wie groß ist das Verhältnis mB /mA der Massen beider Fahrzeuge? 7.9 Ein Fahrzeug mit der Masse m1 = 900 kg fährt mit der unbekannten Geschwindigkeit vx auf ein Hindernis der Masse m2 = 600 kg auf. Nach dem Zusammenstoß rutschen beide Gegenstände ineinander verkeilt noch die Strecke x = 5 m weiter (Reibungskoeffizient μ 1 = 0 für den nicht bremsenden PKW, μ 2 = 0,1 für das Hindernis). Wie groß war die Geschwindigkeit vx ? 89