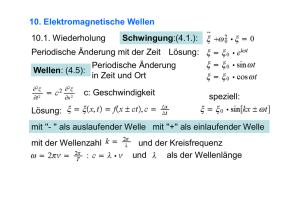
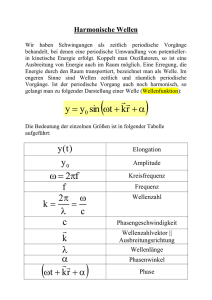
Merkmale von Wellen
Werbung

Elektrische Schwingungen und Wellen 1. Wechselströme 2. Elektrischer Schwingkreis i. Freie Schwingung ii. Erzwungene Schwingung iii. Tesla Transformator 3. Elektromagnetische Wellen i. Wellen ii. Elektromagnetische Wellen iii. Hertzscher Dipol iv. Wellenausbreitung im Vakuum v. Wellen auf Leitungen Merkmale von Wellen Eine Welle liegt vor, wenn alle folgende vier Merkmale zutreffen: • • • • Es erfolgt eine zeitabhängige Veränderung einer Größe, unter Umständen periodisch wiederholt, also eine Schwingung Diese Veränderung breitet sich in ein, zwei, oder drei Dimensionen des Raumes mit einer endlichen Geschwindigkeit aus Ursache für die Kopplung der einzelnen Teile des Raums untereinander sind elastische oder quasielastische Kräfte Es wird dabei Energie transportiert 1 Wellen… Eine Welle ist eine sich im Raum ausbreitende Störung Longitudinale Wellen Störung in Ausbreitungsrichtung 2 Transversale Wellen Störung quer zur Ausbreitungsrichtung z. Bsp. schwingende Saite elektromagnetische Wellen Licht Mathematische Beschreibung x Kette von Teilchen Position fixiert Teilchen wechselwirken (gebunden) d 2x Auslenkung eines freien Teilchens F = M 2 dt Rückstellkraft (Hooksches Gesetz) F = −c x Kombination x+ M d 2x =0 C dt 2 Differentialgleichung 2. Ordnung (Schwingungsgleichung) Lösung: x = x 0 cos(2πνt + ϕ ) mit ν Frequenz ν= 1 C 2π M 3 Alle Teilchen beweglich x n+1 z n-1 n Teilchen wechselwirken mit nächsten Nachbarn, elastisch verbunden 2 (x n − xn−1 ) + (x n − x n+1 ) + M d x2n C dt (x n − x n−1 ) + (x n − x n+1 ) = −∆( ∆x ) ∆( ∆ x ) = ∆ ( ∆x ) (∆z ) 2 b2 ∆( ∆x ) → ∂2x 1 ∂2x − =0 ∂z 2 v 2 ∂t 2 Kraft auf Teilchen n, Rückstellkraft von Nachbarn =0 ∆z = b Abstand in z Richtung d2 x 2 b dz 2 v2 = b 2C M Wellengleichung Lösung der Wellengleichung Allgemeine Lösung der Wellengleichung ⎛ z⎞ ⎛ z⎞ x( z, t ) = f ⎜ t − ⎟ + g⎜ t + ⎟ ⎝ v⎠ ⎝ v⎠ Jede beliebige Störung kann sich als Welle in einem geeigneten Medium fortpflanzen Beweis: Einsetzen in Wgl Interpretation von f und g: vor-und rücklaufende Welle z ⎞ ⎛ z − v ∆t ⎞ ⎛ z ′ ⎞ ⎛ f ⎜ t + ∆t − ⎟ = f ⎜ t − ⎟ = f⎜ t − ⎟ v⎠ ⎝ v ⎠ ⎝ v⎠ ⎝ x ⎛ z⎞ x = f⎜ t − ⎟ ⎝ v⎠ ∆z = v ∆t z z⎞ ⎛ x = f ⎜ t + ∆t − ⎟ v ⎝ ⎠ Störung bewegt sich mit v nach rechts 4 Geschwindigkeit einer Welle ∂ x 1 ∂2x − =0 ∂z 2 v 2 ∂t 2 2 ψ (t , z0 ) v = Geschwindi gkeit ψ ′(t + ∆t , z0 + ∆z ) Phasengesc hwingkeit v ≡ z0 z1 ∆z ∆t z Phasengeschwindigkeit = Quotient aus Weg, den eine bestimmte Phase des Profils (Maximum, Minimum, …) zurücklegt, durch benötigte Zeit Phasengeschwindigkeit elastischer bzw. quasielastischer Medien ist bei genügend kleinen Amplituden nur von den Eigenschaften der betreffenden Medien abhängig aber nicht von der Amplitude Energiedichte Erzeugung von Welle: Energiezufuhr Welle: Energie wird in Ausbreitungsrichtung transportiert Medium: Wellenbewegung erfasst, Energie pro Volumen = Energiedichte w Mechanische Welle: Harmonisch schwingendes Teilstück mit Masse m 1 1 1 2 2 = m ωres Schwingung senergie W = DA2 = m v max A2 2 2 2 A Amplitude, D Federkonstante, vmax maximale Geschwindigkeit, ωres Resonanzfrequenz 1 1 2 2 m ωres A 2 = ρdV ωres A2 2 2 dW 1 2 = ρ ωres w= A 2 Energiedichte nur von Dichte des Materials dV 2 abhängig dW = 5 Energiestrom bzw. Leistung Energie wird mit Geschwindigkeit c transportiert (in Sonderfällen ungefähr gleich der Phasengeschwindigkeit) Wie viel Energie der Welle strömt durch Querschnitt F in der Zeit t? F F Welle ct Energie W die im Volumen V = c t F war 1 2 W = c t F ρ ωres A2 2 Pro Zeiteinheit transportierte Energie (Energiestrom) bzw. Leistung P W 1 2 = c F ρ ωres P= A2 t 2 Energiestromdichte (Intensität) und Strahlungsdruck Energiestromdichte bzw. Leistungsdichte S: Leistung/Fläche S= P 11 1 2 2 = c F ρ ωres A 2 = c ρ ωres A 2 = cw F F2 2 S Intensität = Geschwindigkeit x Energiedichte Reflexion bzw. Transmission einer Welle an Grenzfläche: Druck auf Grenzfläche in Ausbreitungsrichtung Impuls und Energieerhaltung muss gelten Strahlungsdruck bei vollständiger Reflexion pref = 2 S/c Vollständiger Absorption pabs = S/c 6 Dreidimensionale WGL Erweiterung der Wellengleichung für Störungen in alle Richtungen ∂ 2p ∂ 2p ∂ 2p 1 ∂ 2p + + − =0 ∂x 2 ∂y 2 ∂z 2 v 2 ∂t 2 ∇ 2p − 1 ∂ 2p =0 v 2 ∂t 2 Nabla ∇ vektorieller Differentialoperator ∇= ∂ r ∂ r ∂ r e x , ey ez ∂x ∂y ∂z ∇∇ = ∇ 2 = ∆ = ∂2 ∂2 ∂2 + 2+ 2 2 ∂x ∂y ∂z Planwellen Annahme: Abhängigkeit von z und t Störung in gesamten xy Ebene konstant rr r p( r , t ) = A cos ωt + k r + ϕ ( ) x k r z y ωt+kr =const Ort gleicher Phase ist Ebene Ausbreitung wird das ganze Medium erfasst, Wellenfront vergrößert sich nicht: Energiedichte bleibt konstant ⇒ Amplitude bleibt konstant 7 Kugelwellen Schwingungsenergie in punktförmigen Wellenzentrum zugeführt Welle breitet sich symmetrisch aus sphärische Symmetrie Phasenfronten: Kugeln Zugeführte Energie = konstant wird aber mit zunehmenden Abstand r auf immer größeres Volumen verteilt Gleiches gilt für Leistung P(r ) = W 1 2 = c 4π r 2 ρ ωres A 2 = konst t 2 Nur erfüllbar wenn Amplitude mit Abstand r abnimmt rr r A p(r , t ) = cos ωt + k r + ϕ r ( ) Amplitude einer Kugelwelle ⇒ Intensität nimmt mit 1/r2 ab Überlagerung von Wellen ψ 1 (r , t ), ψ 2 (r , t ),K, , ψ n (r , t ) Sind Lösungen der Wellengleichung: ∂ 2ψ ∂ 2ψ ∂ 2ψ 1 ∂ 2ψ + + = ∂x 2 ∂y 2 ∂z 2 υ 2 ∂t 2 Die Linearkombinationen von ψ 1 (r , t ), ψ 2 (r , t ), K, , ψ n (r , t ) ψ (r , t ) = n ∑ C ψ (r , t ) i i i =1 sind auch Lösungen Wellengleichungen 8 Ausbreitung von Wellen v1 v2 v1 > v2 0 < t < 1 v1 = v2 t=1 v1 < v2 0 < t < 1 -1 < r < 0 r=0 0<r<1 An der Grenze zwischen zwei Medien mit verschiedenen Phasengeschwindigkeiten wird eine Welle teilweise reflektiert, und zwar mit einem π Phasensprung, wenn die Geschwindigkeit im zweiten Medium niedriger als im ersten ist Diese Aussage gilt für alle Wellen Stehenden Welle Vorwärtswelle wird in sich selbst rückreflektiert E1 = E0 sin(kz − ωt ) E 2 = E0 sin(kz + ωt ) ER = E1 + E 2 = E0 [sin(kz − ωt ) + sin(kz + ωt )] sin α + sin β = 2 sin 12 (α + β ) cos 12 (α − β ) ER = (2E0 sin kz ) cos ωt Stehende Welle Ortsabhängige Amplitude A(z) 9 Wellen in elastischem Medium Räumlicher Druckunterschied führt zu Beschleunigung des Volumens Beschleunigtes Volumen bewirkt einen lokalen Geschwindigkeitsunterschied Lokaler Geschwindigkeitsunterschied führt zu zeitlicher Deformation des Volumens Zeitliche Deformation des Volumens führt zu räumlichen Druckunterschied …. Ausbildung einer Welle, die anfängliche Störung im Medium weiterleitet Maxwellgleichungen Wenn Materie vorhanden, elegantere Formulierung der Maxwellgleichungen unter Verwendung von E,D,B und H r r r ∂D Ampere - Maxwellsches rotH = j + Gesetz ∂t r Faradaysches – Induktionsv ∂B rotE = − gesetz ∂t r Gauß‘scher Satz für divD = ρ E-Felder r Gauß‘scher Satz für divB = 0 B-Felder r r D = ε r ε 0E r r B = µ r µ0H r r ∂ r r H d s = I + Dda ∫ ∂t ∫A C v r ∂ r r E d s = − Bda ∫ ∂t ∫A C r r ∫A Dda = Q r r B ∫ da = 0 A 4 Maxwellgleichungen + Verknüpfungen der Feldgrößen ausreichend um Phänomene in Elektrizität und Magnetismus zu beschreiben 10 E- und M Feld beeinflussen sich gegenseitig Veränderung von Elektrischem Feld E bzw. D erzeugt Magnetfeld B (bzw. H) Veränderung von Magnetfeld B erzeugt E Feld, erzeugt B- Feld…… E und B gekoppelt: Maxwell Analogie zur Schallausbreitung: Kompression in Gas erzeugt Druck, der versucht Umgebung zu deformieren Elektromagnetische Wellen y E Geladene Schicht B J B E B E B=E=0 x z vt x=0 x = x0 t < 0: Geladene Schicht in y-z Ebene Ruhe: B=0 E=0 (durch zusätzliche Schicht) t = 0: Geladene Schicht wird in y-Richtung beschleunigt t > 0: Schicht bewegt sich mit konstanter Geschwindigkeit in y- Richtung Bewegte Ladung = Flächenstrom J ⇒ Magnetfeld B = konst. = ∝ J für x>0 in +z bzw. x<0 in -z Richtung Magnetfeld ändert sich sehr schnell, d.h. es wird ein E-Feld erzeugt (∝∂B/∂t) E-Feld ändert sich sehr schnell, d.h. es wird ein B-Feld erzeugt (∝∂E/∂t) …. …. E und B sind miteinander verkoppelt: Wie kann das erklärt werden? 11 B bzw. E als Funktion von Ort und Zeit v B x E vt x0 x Am Anfang nur für x ≈ 0 B ≠ 0 für x>> 0 B =0 Bereich für x in dem B ≠ 0 = konst. breitet sich aus E-Feld zeigt dasselbe Verhalten Die Information kann sich nicht unendlich schnell ausbreiten, sondern nur mit Geschwindigkeit v daher kommt das Feld am Ort x0 erst nach der Zeit t = x0/v an Felder in Seitenansicht Schleife Γ2 so gelegt, dass nur zum Teil von Feld durchsetzt Induktionsgesetz: B = konst., aber Fläche ändert sich - E L = - dΦ/dt = -B dA/dt =- B L v ⇒E=Bv E und B müssen so verknüpft sein, damit sie Faradaysches Induktionsgesetz erfüllen 12 Felder in Draufsicht Für Schleife Γ1 gilt: r r 1 ∂ r r 2 ∫ Eda 0 ∂t A ∫ Bds = µ I + c 0 Γ1 Strom = 0, von E-Feld durchsetzte Fläche ändert sich mit v ⇒c02 B L = E v L ⇒ E= c02 /v B Vergleich Draufsicht-Seitenansicht Seite gesehen E = v B Oben gesehen E = c02/v B Unterschiedliche Verknüpfungen zwischen E und B Widerspruch lösbar, wenn v = c0 d.h. Wellenfront breiter sich mit Lichtgeschwindigkeit aus 13 Strom ein und aus a) Strom für t = 0 eingeschalten b) Strom für t = T in umgekehrter Richtung gleicher Betrag Eingeschalten: Felder breiten sich aus mit umgekehrten Vorzeichen aus Superposition von a und b: Stromimpuls erzeugt Bündel von E und B mit Länge cT, das sich ausbreitet Kombinierter Effekt von B und E erhält Felder aufrecht, Wellenausbreitung ohne Medium möglich Herleitung der WGL für Elektromagnetische Wellen Annahme Vakuum: keine Strom j und keine Ladungen ρ D = ε0 E H= µ0 B ∂B ∂E rotE = − rotB = ε 0 µ0 ∂t ∂t Anwendung von rot auf MW Gleichung und einsetzen ∂ ∂⎛ ∂E ⎞ ∂ 2E ⎛ ∂B ⎞ rot (rotE ) = rot ⎜ − ⎟ = − rotB = − ⎜ ε 0 µ0 ⎟ = −ε 0 µ 0 2 ∂t ∂t ⎝ ∂t ⎠ ∂t ⎝ ∂t ⎠ rot (rotE ) = grad (divE ) − div (gradE ) divE = 0 keine Ladungen im Vakuum div (gradE ) = ∆E ∆E − ε 0 µ 0 ∆E − ∂ 2E =0 ∂t 2 1 ∂ 2E =0 2 2 c0 ∂t ε 0 µ0 = 1 2 c0 c0 …Geschwindigkeit 3 dimensionale Wellengleichung 14 EM Wellen Geschwindigkeit c0 = 1 Geschwindigkeit EM Wellen ε 0 µ0 Einsetzen liefert: c0 = 2.999…. 108 m/s Phasengeschwindigkeit EM Wellen = Lichtgeschwindigkeit im Vakuum Historisch: Definition Ladung und Magnetfeldstärke Messung von ε0 und µ0 Berechnung von c0‘ Vergleich mit direkt gemessener Lichtgeschwindigkeit c0 = c0‘ ⇒ EM Wellen und Licht haben „Verwandtschaft“ Heute: Definition von c0 (exakter Wert) Definition von µ0 (Festlegung Einheit Strom bzw. Ladung) ε0 damit auch fest bestimmt Phasengeschwindigkeit in Materie In Materie (homogen, isotrop) gilt c= 1 ε r ε 0 µr µ0 = c0 ε r µr µ = µr µ0 ε = ε rε0 Phasengeschwindigkeit in Materie Optik c = c0/n n Brechungsindex n2 = εrµr Zusammenhang rein optischer Größe mit rein elektrischen Größen 15 EM Wellen r r r r r 1 ∂ 2E r ∆E − 2 2 = 0 Allgem. Lösung : E (r , t ) = E (ωt − kr ) c0 ∂t Sonderfall: E hängt nur von einer Koordinate ab ∂E ∂E =0 =0 ∂x ∂y ∂ 2E 1 ∂ 2E − =0 ∂z 2 c 2 ∂t 2 Lösung ebene harmonisch e Welle : E (z, t ) = E0 sin(ωt − kz ) Welche Richtung hat E? Wie schaut das zugehörige Magnetfeld aus? Es muss ein B-Feld geben, damit sich EM Welle ausbreiten kann Eigenschaften EM Wellen 1. Analoge Herleitung einer Wellengleichung für B-Feld Lösung gleich wie für E Feld: B = B0 sin(ωt –kz) E Änderung erzeugt B-Feld, B-Änderung erzeugt E- Feld…. 2. EM Wellen in Vakuum sind transversal: Damit Komponente in Ausbreitungsrichtung, abwechselnd Feldquellen – und senken: im ladungsfreien Raum nicht vorhanden div E = 0, für B gilt immer div B = 0 E und B stehen normal auf Ausbreitungsrichtung 3. B und E stehen senkrecht aufeinander Annahme E in x-Richtung pol, Einsetzen in Maxwellgleichung rot Ex = - dB/dt ⇒ B = By 4. B und E sind in Phase und B0= 1/c E0 (Einsetzen in MW Gl) r 1 r r B = k ×E ( ω ) Aussagen 1-4 zusammengefasst 16 Elektromagnetische Wellen Mögliche Lösung der Wellengleichung Linear polarisierte ebene harmonische Wellen E und B normal zueinander und normal auf Ausbreitungsrichtung E und B sind in Phase Energie und Impulstransport EM Maß für den Transport: Energiestromdichte S = Energie pro Zeit und Fläche = Geschwindigkeit mal Energiedichte S = c (w e + w m ) Zeitlich gemittelte Energiedichte von 1 1 2 w e = ε 0E 2 w m = B E und B im EM Feld 2 2µ 0 1 1 E2 = we für EM Welle gilt : B = E ⇒ w m = c 2µ0 c 2 ε0 2 1 S = c 2 w e = cw em = E = EB µ0 µ0 Richtung des Energietransports S = Poynting-Vektor r 1 r r S= E ×B µ0 Poynting Vektor (J. H. Poynting 1852 -1914) Isotrope Medien: Energie in Ausbreitungsrichtung transportiert 17 Energietransport Strom mit Widerstand R von Strom I durchflossen. Leistung I2R verbraucht (Joulsche Wärme) Im stationären Betrieb nachgeliefert E B S Poynting Vektor radial zu Draht: Energie strömt nicht durch Draht sondern radial von außen in den Draht I Elektronen bewegen sich mit vdrift (langsam) E und B mit Lichtgeschwindigkeit Energie durch EM Feld transportiert und nicht durch materiellen Ladungstransport Impulstransport EM Welle EM Wellen tragen nicht nur Energie sondern auch Impuls Bei Reflexion bzw. Absorption Impulsübertrag auf Körper: Impulsübertrag pro Fläche und Zeit = Strahlungsdruck p Strahlungsdruck bei vollständiger Reflexion pref = ε0E2 = wem = (P/A) 1/c = 2 I / c Intensität I: Leistung pro Fläche Vollständiger Absorption pabs = ½ ε0E2 = ½ wem = I/c Bsp. 10 W auf 1mm2 pabs =3.3 10-2 Pa ⇒ F = 3.3 10-8N 18