Mechanik 4.nb - Hochschule Trier
Werbung

Mechanik 4.nb
*UXQGODJHQGHU3K\VLN
Vorlesung im Fachbereich VI der Universität Trier
Fach: Geowissenschaften
Wintersemester 2000/2001
'R]HQW
'U.DUO0ROWHU
'LSORP3K\VLNHU
)DFKKRFKVFKXOH7ULHU
7HO
)D[
(0DLOPROWHU#IKWULHUGH
,QIRV]XU9RUOHVXQJXQWHUKWWSZZZIKWULHUGHaPROWHUJGS
Version: 1.0
23.01.01
/LWHUDWXU
•
•
•
•
•
•
•
•
•
6WURSSH: 3K\VLN,
Hanser Fachbuchverlag, 1999, ISBN 3-446-21066-0
+HULQJ0DUWLQ6WRKUHU: 3K\VLNIU,QJHQLHXUH,
Springer, Berlin; VDI, 1999, ISBN 3-540-66135-2
3DXO$7LSOHU: 3K\VLN,
Spektrum Akademischer Verlag, 2000, ISBN 3-86025-122-8
*HUWKVHQ: 3K\VLN,
Springer Verlag, 1999, ISBN 3-540-65479-8
%URQVWHLQ6HPHQGMDMHZ: 7DVFKHQEXFKGHU0DWKHPDWLN,
Verlag Harri Deutsch, 2000, ISBN 3-8171-2005-2
-UJHQ(LFKOHU: 3K\VLN,
Vieweg Verlag, 1993, ISBN 3-528-04933-2
+DQV-3DXV: 3K\VLN,
Hanser Verlag, 1995, ISBN 3-446-17371-4
.ODXV:HOWQHU: 0DWKHPDWLNIU3K\VLNHU,
Vieweg Verlag (nur noch als CD-ROM, ISBN 3-528-06775-6, erhältlich!)
6WHSKHQ:ROIUDP: 7KH0DWKHPDWLFD%RRN,
Cambridge University Press, 1999, ISBN 0-521-64314-7
Mechanik 4.nb
Mechanik fester Körper (4)
,PSXOV
Das zweite Newtonsche Axiom (manchmal auch Grundgesetz der Mechanik genannt) lässt sich noch
kürzer formulieren:
¾»
»
G ¾S» ¾»
G »Y =
G HP »
) = m D = m
Y
L
=
=
S
dt
dt
GW
[1]
(Wir gehen dabei davon aus, dass die Masse zeitlich konstant ist!)
Die Größe
¾»
¾»
S=mY
NJ P
E.
bezeichnen wir als ,PSXOV. Sie hat die Einheit A
V
Der Impuls ist eine vektorielle Größe und verläuft parallel zur Geschwindigkeit.
Wir werden sehen, dass der Impuls den Bewegungszustand eines Körpers wesentlich besser
characterisiert als die Geschwindikeit.
Durch Integration können wir die Gleichung [1] auch nach dem Impuls auflösen:
Es gilt:
¾»
¾»
) dt = dS
und daraus folgt:
¾»
W2 ¾ »
S2 ¾»
¾¾¾» ¾¾¾»
¾»
ÁW1 ) Ê W = Á¾S»1 Ê S = S 2 - S 1 = D S
[Ns]
[2]
Man bezeichnet die Größe
¾»
¾»
6) = Á ) Ê W
auch als .UDIWVWR.
Sie beschreibt die Wirkung einer Kraft über einen bestimmten Zeitraum.
Eine andere Bezeichnung für diesen Vorgang ist auch der Begriff ",PSXOVEHUWUDJ".
[3]
Mechanik 4.nb
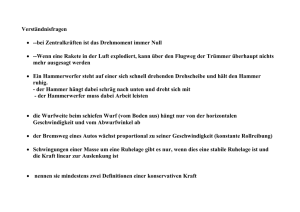
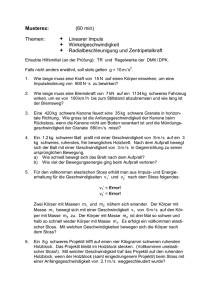
Nach Gleichung [2] erreichen wir den gleichen Impulsübertrag, indem wir eine kleine Kraft über einen
langen Zeitraum wirken lassen oder eine große Kraft über einen kurzen Zeitraum.
Die folgende Graphik demonstriert dies für den Fall zeitlich konstanter Kräfte:
6KRZ@.)D
F
6
5
4
3
2
1
t
1
2
3
4
5
6
7
8
È 'HU,PSXOVVDW]GHU0HFKDQLN
Uns interessiert im folgenden weniger der zeitliche Vorgang des Kraftstosses (er ist oft nur schwer zu
beobachten) sondern die grundsätzliche physikalische Bedeutung der Größe Kraftstoß bzw. Impuls.
Wir formulieren aus dem bisher definierten Größen den Impulssatz der Mechanik:
,PSXOVVDW]GHU0HFKDQLN
1.:
Durch einen Kraftstoss ändert sich der Impuls eines Körpers:
¾»
¾¾¾¾»
¾» ¾¾¾¾»
6) = DS = S - S .
2.:
Der Kraftstoss ist gleich der vektoriellen Impulsänderung.
3.:
Eine von aussen angreifende Kraft hat eine zeitliche
Impulsänderung des Systems zur Folge:
¾»
¾»
)D = S
Der Index "a" bei F soll verdeutlichen, dass eine äussere Kraft am System angreifen muss, um den
Impuls zu ändern.
Mechanik 4.nb
Innere Kräfte sind dazu nicht fähig (Münchhausen kann sich nicht an den eigenen Haaren aus dem
Sumpf ziehen!).
Der vektorielle Charakter des Kraftstosses lässt sich eindrucksvoll an einem einfachen Experiment mit
einem Rollwagen verdeutlichen.
È 'HU,PSXOVHUKDOWXQJVVDW]
Wir haben eben gelernt, dass durch die Einwirkung äusserer Kräfte sich der Impuls eines Systems
gemäß Gleichung [1] ändert.
Wir können daraus auch den Umkehrschluss ziehen:
Schliesst man ein System gegen die Einwirkung äusserer Kräfte ab, also
¾»
) D = 0 oder
¾¾¾¾»
 ) D =0,
dann kann sich der Gesamtimpuls des Systems nicht ändern.
Dies führt uns zum
,PSXOVHUKDOWXQJVVDW] GHU 0HFKDQLN:
¾»
¾¾¾¾»
¾»
¾»
Bei ) D = 0 (bzw. Â ) D = 0) folgt S = 0 und damit S = const.
Der Gesamtimpuls eines abgeschlossenen Systems ist nach Betrag und Richtung konstant.
Man beachte:
"Abgeschlossen" im Sinne der Impulserhaltung heisst: Es wirken keine resultierende äussere Kräfte.
"Abgeschlossen" im Sinne der Energieerhaltung bedeutete: Eine Zu- oder Abfuhr von Arbeit ist nicht
möglich.
Die Impulserhaltung im abgeschlossenen System lässt sich eindrucksvoll anhand von Experimenten mit
Sprengschlitten auf der Luftkissenbahn demonstrieren.
Man versteht darunter zwei Schlitten, die mittels eines dünnen Seils fest miteinander verbunden sind und
zwischen denen eine zusammengedrückte Feder (oder eine kleine Sprengladung) angebracht ist. Indem
man das Seil zertrennt oder die Sprengladung zündet, setzen sich die Schlitten in Bewegung.
Da nur innere Kräfte wirken, muss der Gesamtimpuls erhalten bleiben.
Im Falle gleich schwerer Schlitten bewegen diese sich mit gleicher Geschwindigkeit in entgegengesetzte
Richtungen, so dass gilt:
¾»
¾¾¾¾»
¾¾¾¾»
DS = P1 Y + P2 Y = m v + m (-v) = 0 .
Mechanik 4.nb
Sind die Schlitten dagegen unterschiedlich schwer, bewegen sie sich mit unterschiedlicher
Geschwindigkeit in entgegengesetzte Richtung so dass gilt:
¾¾¾¾»
¾¾¾¾»
P1 Y = - P2 Y oder, wenn wir nur die Beträge der Geschwindigkeiten berücksichtigen:
P 1 Y1 = P 2 Y2
Ist die Masse eines der Schlitten bekannt, können wir mittels dieses Experiments durch Messung von
Geschwindigkeiten die unbekannte Masse bestimmen:
Y1
P2 =
Y2 P1
È 6FKZHUSXQNWVDW]
In einem System, das aus vielen einzelnen Teilchen besteht, lässt sich der Impulssatz relativ einfach
formulieren, wenn man den Schwerpunkt (oder Massenmittelpunkt) des Vielteilchensystems definiert.
ì 6FKZHUSXQNWRGHU0DVVHQPLWWHOSXQNW
Der Schwerpunkt oder Massenmittelpunkt eines Systems verschiedener Massenpunkte PL bewegt sich
so, als sei die gesamte Masse darin vereinigt, und als griffen die äusseren Kräfte im Schwerpunkt an.
Der Schwerpunkt wird über die Ortsvektoren und Massen der einzelnen Teilchen wie folgt definiert:
¾» Â P ¾U»
¾»
1
5 =
=
0 Â PL U L
ÂP
L
L
L
[4]
Wir werden bei der Drehbewegung näher auf die Definition und Bedeutung des Schwerpunkts
eingehen.
»
Bewegen sich die Teilchen, dann hängen deren einzelne Ortsvektoren U L von der Zeit ab, und damit auch
¾»
die Schwerpunktskoordinate 5 .
¾¾»
Durch Ableitung nach der Zeit erhalten wir die Schwerpunktsgeschwindigkeit 9 :
¾¾» G 5¾» 1
¾ »
¾»
1
9 =
dt =
P
U L =
Ê
L
0
0 Â PL Y L
Durch Umstellen der Gleichung [5] erhalten wir einen Zusammenhang zwischen dem
Schwerpunktsimpuls
¾»
¾¾»
3=M9
und den Teilchenimpulsen
¾»
¾»
SL = m Y L :
[5]
Mechanik 4.nb
¾»
¾¾»
¾¾»
¾»
3 = M 9 = Â PL Y L = Â S L
[6]
Wir formulieren gemäß Gleichung [6] den
6FKZHUSXQNWVDW]
Der Gesamtimpuls eines Systems verhält sich so, als sei die gesamte Masse im Schwerpunkt
vereinigt und bewege sich mit der Geschwindigkeit des Schwerpunkts.
Differenzieren wir die Gleichung [6] nach der Zeit erhalten wir:
¾»
¾¾¾»
¾¾»
3 = Â SL = Â ) L
[7]
Die Interpretation der Gleichung [7] lautet:
Der Massenmittelpunkt eines Systems bewegt sich so, als sei in ihm die gesamte Masse vereinigt
und als würde in ihm die Summe der äusseren Kräfte angreifen.
Für den Sonderfall eines abgeschlossenen Systems können wir daraus folgern:
¾»
¾»
¾»
¾¾»
Bei ) D = 0 gilt 3 = 0, also 3 = const bzw. 9 = const.
In einem abgeschlossenen System bleibt die Schwerpunktsgeschwindigkeit unverändert
(2.te Form des Impulserhaltungssatzes).
Auch der Schwerpunktsatz lässt sich mittels eines einfachen Experiments mit zwei Rollwagen
demonstrieren.
Ein anderes Beispiel für den Schwerpunktsatz ist eine im Schwerefeld der Erde fliegende
Feuerwerksrakete.
Bei der Explosion beschreiben die einzelnen Bruchstücke mehr oder weniger komplizierte Bahnen.
Der Schwerpunkt der Einzelteile jedoch folgt der durch die Anfangsbedingungen festgelegte Wurfparabel.
È =XVDPPHQIDVVXQJ
Definition des Impulses:
¾»
¾»
S=mY
Definition des Kraftstosses
¾»
¾¾¾¾»
6) = Á ) D Ê W
Mechanik 4.nb
¾»
¾»
¾»
G ¾S» ¾»
) D = S = dt ; 6) = DS
Impulssatz:
¾»
¾»
¾¾¾¾»
¾ »
G3
) ges = Â ) D =
dt = 3
Schwerpunktsatz:
¾»
)D = 0
Impulserhaltungssatz:
¾»
¾»
¾»
S = 0, DS = 0, S = const.
6WRVVJHVHW]H
Durch Anwendung des Impuls- und Energieerhaltungssatzes können viele mechanische Probleme gelöst
werden.
Ein wichtiges und elementares Beispiel ist der Stoss zwischen zwei Massen P1 und P2 .
Man unterscheidet dabei einige grundsätzlich verschiedene Fälle:
Treten keine Reibungskräfte auf und treten nur reversible Deformationsenergien auf so spricht man vom
elastischen Stoss, ansonsten vom LQHODVWLVFKHQ 6WRVV.
Beim inelastischen Stoss betrachtet man einen Sonderfall, und zwar den vollkommen inelastischen
Stoss:
Bei ihm bewegen sich die Stosspartner nach dem Stoss gemeinsam mit gleicher Geschwindigkeit in die
gleiche Richtung.
Treffen sich die Massen auf der Verbindungslinie der jeweiligen Schwerpunkte spricht man vom
JHUDGHQ oder ]HQWUDOHQ 6WRVV, ansonsten vom VFKLHIHQ oder dezentralen Stoss.
Im folgenden gehen wir in aller Kürze auf die einzelnen Varianten des zwei-Teilchen-Problems in einem
(bezüglich Energie und Impuls) abgeschlossenen System ein.
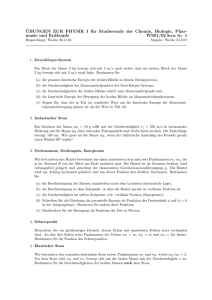
È *HUDGHU]HQWUDOHUHODVWLVFKHU6WRVV
Die folgende Skizze zeigt die Situation vor dem Stoss:
6KRZ@=(6WRVVD
m1
v1
v2
m2
Es gilt aus den Geschwindigkeiten Y1 und Y2 vor dem Stoss die Geschwindigkeiten Y
Stoss zu berechnen.
1
und Y
2
nach dem
Da es sich um ein eindimensionales Problem (Bewegung entlang einer Geraden) handelt, können wir auf
eine vektorielle Betrachtung verzichten. Wir müssen lediglich auf die korrekten Vorzeichen der
Mechanik 4.nb
Geschwindigkeiten achten.
Sowohl der Impuls- als der Energieerhaltungssatz müssen gelten:
Impulssatz:
P1 Y1 + P2 Y2 = P1 Y1 + P2 Y2
[8]
Energiesatz:
12 P1 Y1 2 + 12 P2 Y2 2 = 12 P1 Y1
2
+ 12 P2 Y2
2
[9]
Durch Umordnung kommt man jeweils zu:
P1 HY1 - Y1 L = P2 HY2 - Y2 L
[10]
und
P1 HY1 2 - Y1 2 L = P2 HY2 2 - Y2 2 L
[11]
Dividiert man die Gleichung [11] durch die Gleichung [10] und wendet die dritte binomische Formel an
erhält man:
Y1 + Y1 = Y2 + Y2
[12]
oder
Y1 - Y2 = Y2 - Y1
[13]
Bezeichnen wir die Differenzgeschwindigkeit mit Yrel so können wir für die letzte Gleichung schreiben:
Yrel = -Yrel
[14]
Beim elastischen Stoss bleibt als nach dem Stoss die Relativgeschwindigkeit der beiden Stosspartner
erhalten, sie kehrt nur ihr Vorzeichen um.
Aus den Gleichungen [10] und [12] lassen sich nun leicht die Geschwindigkleiten Y1 und Y2 nach dem
Stoss berechnen:
Aus [12] folgt unmittelbar:
Y2 = Y1 + Y1 - Y2
[15]
Dies setzen wir in [10] ein und lösen nach Y1 auf:
P1 HY1 - Y1 L = P2 HY1 + Y1 - 2 Y2 L
[16]
Mechanik 4.nb
Auflösung der Gleichung [16] nach Y1 liefert schliesslich:
P1 P2
2 P2
Y1 =
P1
P2 Y1 +
P1
P2 Y2
-
+
[17]
+
Auf dieselbe Art erhält man für Y2 :
2 P1
P2 P1
Y2 =
P1
P2 Y1 +
P1
P2 Y2
-
+
[18]
+
Zum besseren Verständnis untersuchen wir einge Spezialfälle des zentralen elastischen Stosses.
ì *OHLFKH0DVVHQHLQ.|USHULQ5XKH
Es sei P1 = P2 = P und Y2 = 0
Die Gleichungen [17] und [18] liefern uns sofort:
Y1 = 0 und Y2 = Y1 .
Der stossende Körper kommt nach dem Stoss zur Ruhe, der gestossene Körper übernimmt die
Geschwindigkeit (und damit Impuls und Energie) des stossenden Körpers.
P = P = Y = Y = [ = [ = =HQWUDO6WRVV@8P P< 8Y Y< 8[ [<D
2
4
ì 0DVVHQYHUKlOWQLVHLQ.|USHULP5XKH
Es sei P1 = 2 P2 und Y2 = 0:
Der stossende Körper besitzt die doppelte Masse des gestossenen.
Die Gleichungen [17] und [18] liefern uns:
Y1 = 13 Y1
und Y2 = 43 Y1 .
6
8
Mechanik 4.nb
Der stossende Körper läuft dem gestossenen langsam hinterher.
P = P = Y = Y = [ = [ = =HQWUDO6WRVV@8P P< 8Y Y< 8[ [<D
2
4
6
8
10
Es sei 2P1 = P2 und Y2 = 0
Der stossende Körper besitzt die halbe Masse des gestossenen.
Die Gleichungen [17] und [18] liefern uns:
Y1 = - 13 Y1
und Y2 = 23 Y1 .
Der stossende Körper kehrt seine Bewegungsrichtung um, der gestossene dagegen bewegt sich in
Stossrichtung.
P = P = Y = Y = [ = [ = =HQWUDO6WRVV@8P P< 8Y Y< 8[ [<D
1
2
3
4
5
6
7
Mechanik 4.nb
ì 0DVVHQYHUKlOWQLVVHKUJURVVHLQ.|USHULQ5XKH
Es sei P1 ` P2 und Y2 = 0: (Experiment)
Dies entspricht dem Stoss gegen eine massive Wand.
bilden wir P2 in den Gleichungen [17] und [18] so erhalten wir:
Y1 = -Y1
und Y2 = 0 .
Die Bewegungsrichtung des stossenden Körpers kehrt sich um, er wird an der Wand "reflektiert". Die
Wand bleibt in Ruhe.
P = P = Y = Y = [ = [ = =HQWUDO6WRVV@8P P< 8Y Y< 8[ [<D
1
2
3
4
5
ì (QHUJLHEHUWUDJ
Aus den Beispielen oben konnten wir entnehmen, dass die Übertragbarkeit der kinetischen Energie vom
stossenden zum gestossenen Teilchen stark vom Massenverhältnis der Partner abhängt.
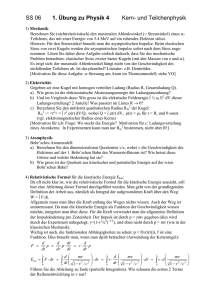
Mit Hilfe der Gleichungen [17] und [18] lässt sich die übertragene (kinetische) Energie für den Fall Y2 = 0
einfach berechnen veruschen Sie die Rechnung nach zu vollziehen).
Für die kinetischen Energien des stossenden Teilchens vor und nach dem Stoss gilt:
P1 P2
(1 = I
P1
P2 M (1
-
2
+
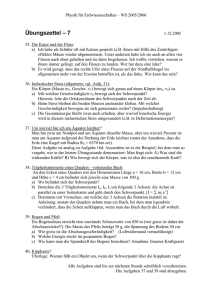
Der folgende Graph gibt das Verhältnis der kinetischen Energie nach dem Stoss / vor dem Stoss als
Funktion des Massenverhältnisses wieder:
[19]
Mechanik 4.nb
[ - y
j
/RJ/LQHDU3ORWAi
j z
z k [+ {
P
(
8[ < $[HV/DEHO 9[= \= =E
P
(
E1
y=
E1
1
0.8
0.6
0.4
0.2
0
0.050.1
0.5 1
5
m1
x=
m
2
10
Ist das Massenverhältnis kleiner 1, gibt der stossende Partner einen Teil seiner kinetischen Energie ab,
es sei denn der es handelt sich um einen Stoss gegen eine massive Wand (Reflektion).
Ist das Massenverhältnis genau 1, kommt der stossende Partner zur Ruhe, seine kinetische Energie ist
nach dem Stoss Null.
Mit zunehmendem Massenverhältnis gibt der Stosspartner immer weniger Energie ab.
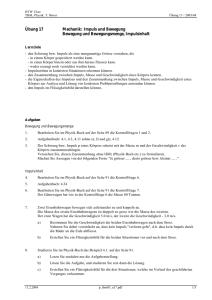
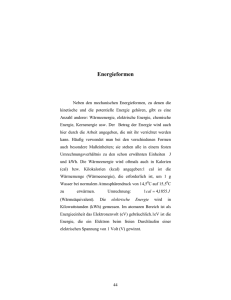
Die vom Stosspartner 1 auf den ruhenden Partner 2 übertragene Energie ergibt sich zu:
4 P1 P2
(2 =
2 (1
HP 1 P 2 L
+
Der folgende Graph verdeutlicht diesen Zusammenhang:
[20]
Mechanik 4.nb
[
/RJ/LQHDU3ORWA H[ + L
(
P
8[ < $[HV/DEHO 9[= \= =E
P
(
E2
y=
E1
1
0.8
0.6
0.4
0.2
0
0.01
0.050.1
0.5 1
5 10
m1
x=
m2
Der maximale Energieübertrag findet bei gleich grossen Massen statt, ansonsten wird immer nur ein Teil
der Energie übetragen.
È *HUDGHU]HQWUDOHULQHODVWLVFKHU6WRVV
Bei dieser Variante stösst ein Körper der Masse P1 , der Geschwindigkeit Y1 , dem Impuls S1 und der
kinetischen Energie
S1 2
(1 = 12 P1 Y1 2 =
2 P1
auf einen zweiten Körper der Masse P2 , der Geschwindigkeit Y2 , dem Impuls S2 und der kinetischen
Energie (2 .
Nach dem Stoss bewegen sich beide gemeinsam mit der gleichen Geschwindigkeit Y in die gleiche
Richtung.
Die Verhältnisse werden vollständig durch den Impulssatz beschrieben:
P1 Y1 + P2 Y2 = HP1 + P2 L Y .
[21]
Die Geschwindigkeit Y der beiden Körper ergibt sich daraus sofort zu:
P1
P2
Y =
P1
P2 Y1 +
P1
P2 Y2 .
+
+
ì (QHUJLHEHUWUDJ
Die kinetische Energie nach dem Stoss ergibt sich zu:
[22]
Mechanik 4.nb
2
HP1 Y1 P2 Y2 L
( = 12 HP1 + P2 L Y 2 = 12
P1
P2
+
+
[23]
Betrachten wir auch hier den Fall näher, bei dem der zweite Stosspartner am Anfang ruht HY2 = 0L:
Für Gleichung [23] lässt sich dann vereinfachend schreiben:
P1 1
P1
( =
P1 Y1 2 =
P1
P2
2
P1
P2 (1
+
+
[24]
Der Energieübertrag hängt dann nur noch vom Massenverhältnis der beiden Körper ab:
P1
(
(1 =
P1
P2
[25]
+
Der Bruchteil
(1 (
P2
(
(E1 =
(1 = 1 -
(1 =
P1
P2
-
D
+
[26]
ging beim Stoss in Form von Wärme verloren!
Er ist umso größer, je größer die Masse des gestossenen Körpers ist.
Im Extremfall eines inelastischen Stosses gegen eine feste Wand wird die gesamte kinetische Energie in
Wärme umgewandelt.
ì *OHLFKH0DVVHQHLQ.|USHULQ5XKH
Es sei P1 = P2 = P und Y2 = 0
Die Gleichung [22] liefert uns sofort:
Y = 12 Y1 .
Die Körper bewegen sich zusammen mit der halben Anfangsgeschwindigkeit weiter.
Die Energie vor dem Stoss betrug:
(1 = 12 P Y1 2
Die Energie nach dem Stoss beträgt
( = 12 H2 PL Y
2
= 14 P Y1 2 = 12 (1 ,
der Energieverlust beträgt also die Hälfte der ursprünglichen Energie, wie nach Gleichung [26] zu
erwarten ist.
Der Impuls vor dem Stoss betrug:
S1 = P Y1 ,
Mechanik 4.nb
nach dem Stoss
S = H2 PL Y = 2 P 12 Y1 = P Y1 = S1 .
Der Impuls bleibt also vollständig erhalten!
P = P = Y = Y = [ = [ = =HQWUDO6WRVV7RW,Q@8P P< 8Y Y< 8[ [<D
Weg s
1
2
3
4
5
6
7
ì *OHLFKH0DVVHQJOHLFKHDEHUHQWJHJHQJHVHW]WH*HVFKZLQGLJNHLW
Es sei P1 = P2 = P und Y2 = - Y1 = Y
Die Gleichung [22] liefert uns sofort:
Y1 = 0 .
Die stossenden Körper kommen nach dem Stoss zur Ruhe.
Demnach wird die gesamte Energie in Wärme umgesetzt (Gleichung [26] gilt hier nicht mehr, da Y2 ¡ 0!
Der Impuls dagegen ist vollständig erhalten, da
S1 = P Y - P Y = 0 = S
P = P = Y = Y = -
[ = [ = =HQWUDO6WRVV7RW,Q@8P P< 8Y Y< 8[ [<D
Mechanik 4.nb
Weg
1
2
3
4
5
È 6FKLHIHUGH]HQWUDOHUHODVWLVFKHU6WRVV
Beim schiefen elastischen Stoss treffen sich die Stosspartner nicht zentral (also nicht auf der
Verbindungslinie der Schwerpunkte), die Bewegung läuft nicht mehr auf einer Geraden, sondern in einer
Ebene ab.
Die folgende Skizze veranschaulicht den experimentellen Zusammenhang für den Fall, dass die Masse
P2 vor dem Stoss in Ruhe ist:
6KRZ@'=(6WRVVD
p 2
p 1
m2
a
r2
d
p1
p1
r1
m1
Die Grösse d ist ein Mass für die Dezentralität des Stosses und wird als 6WRVVSDUDPHWHU bezeichnet.
Die Berechnung verläuft ganz analog zum Fall des geraden Stosses indem man den Impulssatz und
Energiesatz ansetzt.
Aus der Abbildung oben kann man zunächst ablesen, dass gilt:
G
sin(a) =
U1 U2 .
+
[27]
Mechanik 4.nb
Der Winkel a, unter dem die Masse P2 in Bezug zur Einfallsrichtung der Masse P1 in Bewegung versetzt
wird hängt nur vom Radius der beiden Massen und vom Stossparameter ab und ergibt sich zu:
Wählt man das Koordinatensystem so, dass die Masse P2 genau im Ursprung ruht HY2 = 0 !L, so lassen
sich die Bedingungen für Impuls und Energiesatz wie folgt formulieren:
1.: Der Impuls entlang der X-Achse bleibt erhalten:
S1 [ = S 1 [ + S 2 [
[28]
2.: Der Impuls entlang der Y-Achse bleibt erhalten:
0 = S 1\ + S 2\
[29]
S2
3.: Bedenken wir das p = m v und damit E = 12 P Y 2 =
, lässt sich der Energiesatz wir folgt schreiben:
2P
S2
S2
S
S2
2
S
2
1
2
1
2
1
+
2 P1 =
2 P
2 P
1
2
[
[
+
\
[
+
[30]
\
Aufgrund der Stossgeometrie kann ein Impuls an P2 nur entlang der Verbindungslinie U1 - U2 übertragen
werden. Der Winkel a kann somit unmittelbar aus der Stossgeometrie nach Gleichung [27] ermittelt
¾¾¾»
werden. Wir können diese Bedingung auch für den Impuls S 2 umformulieren:
S
2
S = tanHaL.
\
[31]
2[
Aus den Gleichungen [28] bis [31] lassen sich die vier gesuchten Grössen:
S 1 [, S 1 \ , S 2 [ , S 2 \
eindeutig bestimmen.
Man erhält:
P2
2
S 1 [ = S0 I 1 - 2
P1 P2 cosHaL M
+
P2
2
S 2 [ = 2 S0
P1 P2 cosHaL
+
P2
S 1 \ = -2 S0
P1 P2 sinHaL cosHaL
+
S 2\ = - S 1\
Sehen wir uns das Ergebnis für zwei identische Massen an:
[32]
[33]
[34]
[35]
Mechanik 4.nb
P = P = Y = [ = -
\ = H* HQWVSULFKW GHP 6WRVVSDUDPHWHU G! *L
6FKLHIHU6WRVV@P P Y [ \D
2
1
0
-1
-2
-3
-6
-4
-2
0
2