Klausur Mikrosystemtechnik für Mechatroniker 98/99
Werbung

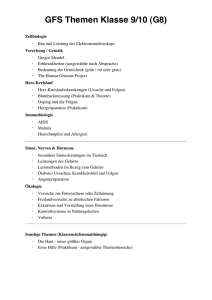
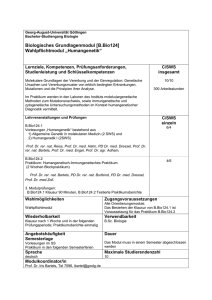
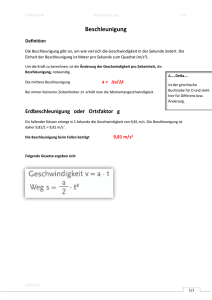
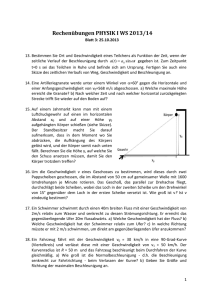
Lehrstuhl für Messtechnik Prof. Dr. rer. nat. A. Schütze Untersuchung der Empfindlichkeit eines Beschleunigungssensors mithilfe eines Lautsprechers Vorbereitende Aufgaben: Diese Aufgaben dienen der Vorbereitung auf den Praktikumsversuch und sollen Sie mit den grundlegenden Messgeräten und einigen Messprinzipien der Messtechnik vertraut machen. Die Aufgaben sollen vorbereitet werden, um das verständnisvolle Arbeiten während des Praktikums zu ermöglichen. Bereiten Sie bitte den Praktikumsbericht (vergleiche Muster im Anhang!) in der Gruppe als Textfile (MS Word) so weit wie möglich vor und bringen ihn in digitaler Form zum Praktikum mit (USB-Stick). Der Bericht wird während dem Praktikum fertiggestellt, so dass im Idealfall am Praktikumstag der Versuch abgeschlossen werden kann. Zu Beginn des Praktikums werden die vorbereitenden Aufgaben mündlich abgefragt. Bitte bereiten Sie sich entsprechend vor. 1. In diesem Praktikumsversuch werden Multimeter, Oszilloskop, NF(Niederfrequenz)-Verstärker, Funktionsgenerator und Netzgeräte benutzt. Um diese Geräte in Gebrauch nehmen zu können, sollten Sie sich mit ihrer prinzipiellen Funktionsweise vertraut machen, hierzu können Sie z.B. unten genannte Quellen verwenden. 2. Im Praktikumsversuch wird mit den oben genannten Geräten die beschleunigte Bewegung einer Lautsprechermembran gemessen, dabei wird aus der Frequenz und dem Weg die Beschleunigung berechnet. Da wir es hauptsächlich mit sinusförmigen Signalen zu tun haben, sollten Sie ihr Wissen zu dem physikalischen Thema „mechanischen Schwingungen“ auffrischen. Stellen Sie zur Übung eine allgemeine Schwingungsgleichung (zeitabhängige Ortsauslenkung der Schwingung) auf und berechnen Sie die zeitabhängige Beschleunigung der Schwingung. Sie sollten zudem die, in den Formeln verwendeten Größen kennen und beschreiben können. 3. Im Praktikumsversuch werden die Empfindlichkeit und der Frequenzgang eines Beschleunigungssensors bestimmt. Machen Sie sich dazu mit den Begriffen Empfindlichkeit und Frequenzgang vertraut! 4. Machen Sie sich außerdem bitte mit dem Funktionsprinzip des verwendeten Beschleunigungssensors (kapazitiver Beschleunigungssensor) vertraut. Das Funktionsprinzip des Beschleunigungssensors wird im Anhang beschrieben. Hinweis: Beschleunigungssensoren finden unter anderem Anwendung in der Konsumgüterindustrie, wie z.B. in Handys, um dort die Drehung des Bildschirms durch Detektion der Erdanziehung zu erkennen. Eingesetzt werden sie auch im Auto als Airbagsensoren, d.h. zum Erkennen eines Unfalls. 5. Machen Sie sich mit der Methode der Triangulation, die beim Wegsensor verwendet wird, vertraut. Eine Beschreibung hierzu finden Sie ebenfalls im Anhang. 6. Überlegen Sie, wie mit den gegebenen Geräten der Frequenzgang der Empfindlichkeit des Beschleunigungssensors bestimmt werden kann und skizzieren Sie den Versuchsaufbau (wenn gewünscht auf Papier). Wintersemester 2014/15 1 mechatronisches Praktikum Lehrstuhl für Messtechnik Prof. Dr. rer. nat. A. Schütze Hinweis: Bei dem im Wegsensor integrierten Laser handelt es sich um einen Laser der Klasse 2. Deswegen bitte keinesfalls direkt in den Laser sehen! Mögliche Literatur (Links nur aus dem Uni-Netz aufrufbar): - Orlowski, Praktische Elektronik: http://dx.doi.org/10.1007/978-3-642-39005-0 - Bernstein, Messelektronik und Sensoren: http://dx.doi.org/10.1007/978-3-658-00549-8 - Schrüfer, Elektrische Messtechnik Wintersemester 2014/15 2 mechatronisches Praktikum Lehrstuhl für Messtechnik Prof. Dr. rer. nat. A. Schütze Praktikumsdurchführung/Messungen: 1. Wir haben hier einen kapazitiven Beschleunigungssensor auf einer Lautsprechermembran montiert. Der Lautsprecher wird von einem Funktionsgenerator (über einen Stromverstärker) angeregt. Realisieren Sie den Versuchsaufbau wie von Ihnen konzipiert bzw. zu Versuchsbeginn durchgesprochen. Bevor Sie die Geräte in Betrieb nehmen, halten Sie kurz Rücksprache mit dem/der Betreuer/in. Nehmen Sie die Signale des Beschleunigungssensors (x- und y-Richtung) und das Signal des Wegsensorsauf. Regen Sie den Lautsprecher mit einem sinusförmigen Signal mit Amplitude 50mV und einer Frequenz von 20Hz an (Phase 0°). 2. Nehmen Sie das Signal des Beschleunigungssensors senkrecht zur Membran und das Signal des Wegsensors auf. Regen Sie den Lautsprecher ebenfalls mit einem sinusförmigen Signal mit Amplitude 50mV (Phase 0°) an. Ändern Sie nun die Frequenz in 10ner Schritten bis 100Hz und anschließend in 50er Schritten bis 300Hz. Tragen Sie die Anregungsfrequenz und die gemessenen Werte in eine Excel-Tabelle ein und erstellen Sie einen Graphen der gemessenen Daten. 3. Welche Änderungen sind zu beobachten, wenn bei konstanter Frequenz die Amplitude des Anregungssignals geändert wird? (Ein paar Werte messen!) 𝑚 4. Messen Sie das Signal des Beschleunigungssensors einmal bei einer Beschleunigung von 0 𝑠2 𝑚 und einmal bei einer Beschleunigung von 9.81 𝑠2 (Ortsfaktor). Verwenden Sie hierfür den Beschleunigungssensor auf einer separater Platine. Auswertung: 1. Es wird angenommen, dass die x-Achse des Beschleunigungssensors nicht ganz parallel zur Lautsprechermembran verläuft. Berechnen Sie aus den Werten des Beschleunigungssensors in x- und y-Richtung den Winkel α um den der Beschleunigungssensor gegen die Lautsprechermembran verschoben ist. 2. Es soll nun das Empfindlichkeitsverhalten des Beschleunigungssensors untersucht werden. 2.1 Als erstes soll die Frequenzabhängigkeit der Empfindlichkeit berechnet werden. 2.1.1. Wie ist die Empfindlichkeit definiert (Formel)? Wie definieren sich die in der Formel auftretenden Größen bei unserem Versuchsaufbau? Wintersemester 2014/15 3 mechatronisches Praktikum Lehrstuhl für Messtechnik Prof. Dr. rer. nat. A. Schütze 3. 4. 2.1.2. Beachten Sie bitte, dass die x-Achse des Beschleunigungssensors nicht ganz parallel zur Lautsprechermembran verläuft. Korrigieren Sie durch Berechnung den vom Beschleunigungssensor ausgegebenen Wert! 2.1.3. Rechnen Sie die vom Wegsensor ausgegebene Spannung in einen Weg um. Formel siehe Datenblatt!! 2.1.4. Stellen Sie eine Schwingungsgleichung auf, die die Bewegung der Lautsprechermembran beschreibt. Berechnen Sie daraus die Beschleunigung der Lautsprechermembran. Überlegen Sie sich, was die einzelnen Unbekannten in ihrer Formel anschaulich bedeuten und „vorher wir Sie sie kennen“. 2.1.5. Stellen Sie eine Formel für die frequenzabhängige Empfindlichkeit auf. Berechnen Sie die Empfindlichkeit für jede gemessene Frequenz und erstellen Sie einen Graphen. Welche Beobachtungen machten Sie, als Sie die Amplitude des Anregungssignals änderten? Beschreiben Sie ihre Beobachtung (kurz). Welche Angabe zur Empfindlichkeit des Beschleunigungssensors macht das Datenblatt? Lassen Sie sich die angegebene Empfindlichkeit von ihrem/ihrer Betreuer/in erklären. Überprüfen Sie die Angabe mithilfe ihrer gemessenen Werte. Wintersemester 2014/15 4 mechatronisches Praktikum Lehrstuhl für Messtechnik Prof. Dr. rer. nat. A. Schütze Anhang Funktionsweise des Beschleunigungssensors: Bekannt ist aus der Physik: Beschleuni gung Geschwindigkeitsänderung . Zeitabschn itt Die mittlere Beschleunigung im Zeitintervall ∆t ist also gegeben durch: a Für ∆t 0 ist die momentane Beschleunigung gegeben durch: a(t ) v . t dv . dt Im Beschleunigungssensor wird das Newtonsche Gesetz F m a zur Messung der Beschleunigung genutzt, d.h. die Beschleunigung wird in eine Kraft umgesetzt und diese gemessen, hier mit einer Feder. Der Kern des Sensors besteht aus einer beweglichen Masse, der sogenannten trägen oder seismischen Masse. Sie ist über dünne Federelemente mit dem restlichen Sensor verbunden. Wird der Sensor nun beschleunigt, so verändert sich aufgrund der Massenträgheit die Position der Masse auf dem Sensor. Für kleine Auslenkungen ∆d aus der Ruheposition ist die Rückstellkraft linear zur Auslenkung. Es gilt somit gemäß dem Hookeschen Gesetz: Fk k d . k ist dabei die materialabhängige Federkonstante. Konkret werden in diesem Versuch kapazitive Beschleunigungssensoren eingesetzt. In der unten stehenden Abbildung 1 ist zu erkennen, wie die Federkraft Fk der Trägheitskraft Fa entgegenwirkt. Beschleunigung Feder Masse bewegliche C C Elektrode Verankerungspunkte feststehende Außenelektroden Masse C C Abb. 1: Schematischer Aufbau des Sensors Wintersemester 2014/15 5 mechatronisches Praktikum Lehrstuhl für Messtechnik Prof. Dr. rer. nat. A. Schütze Es gilt dann: Fa Fk m a k d d ma k (1) Im Aufbau des Sensors in Abb. 1 sind kammartig ineinander geschobene Elektroden zu erkennen. In der Abb. 2 ist ein sog. Differential-Plattenkondensator dargestellt. Die Größe der Einzelkapazitäten C1 und C2 hängt vom Abstand der Platten, von der Fläche der Platten und vom Material, dass sich zwischen beiden Platten befindet, ab. C1 d1 d2 C2 Abb. 2: Differenzialkondensatorprinzip Diese Anordnung ist im Sensor wieder zu erkennen, jedoch etwas verschachtelt. Es gilt: C1 0 A d1 C2 0 A d2 Der Mittelabgriff bildet die bewegliche Elektrode, die direkt mit der seismischen Masse verbunden ist. Am Rand befinden sich Elektroden, die ortsfest auf dem Substrat befestigt sind. Es gilt also: d1 d 0 d und d 2 d 0 d . Für die Differenz beider Kapazitäten ergibt sich: C C 2 C1 2A Wintersemester 2014/15 6 d d 0 d 2 2 . mechatronisches Praktikum Lehrstuhl für Messtechnik Prof. Dr. rer. nat. A. Schütze Prinzipiell ist die Bestimmung von ∆d nun durch obige Gleichung mit der Bestimmung von C1 und C2 verbunden. Es empfiehlt sich jedoch, den Quotienten C 2 C1 zu betrachten. Nach elementaren C1 C 2 Vereinfachungen ergibt sich nämlich: C2 C1 d C1 C2 d0 (2) Im Sensor ist eine entsprechende Schaltung integriert, die genau diesen Wert bestimmt und als Spannung ausgibt. Da d proportional zu a ist, kann somit also die Beschleunigung gemessen werden. Allerdings beeinflussen viele Größen (Wert der seismischen Masse m, Federkonstante k) den Proportionalitätsfaktor, der damit auch in der Praxis experimentell bestimmt wird nach Herstellung der Sensoren. Man spricht hier von einer Kalibrierung der Sensoren, die für praktisch jede Messung und jeden Sensor erforderlich ist, um korrekte Messergebnisse zu erhalten. Der Versuchsaufbau dient also letztlich zur Kalibrierung des Beschleunigungssensors. Wintersemester 2014/15 7 mechatronisches Praktikum Lehrstuhl für Messtechnik Prof. Dr. rer. nat. A. Schütze Originalaufnahmen eines mikromechanischen Beschleunigungssensors Abb. 3 Abb. 4 Abb. 5 Abb. 6 Bitte beachten: bei dem Sensor handelt es sich um einen zweidimensionalen Beschleunigungssensor, d.h. es kann sowohl die Beschleunigung in x- als auch y-Richtung (jeweils in der Ebene des Sensorchips) gemessen werden. Auf dem Sensor ist neben der mikromechanischen Struktur (achteckige Struktur im Zentrum von Abb. 3 und 4), die sich in x- und y-Richtung bewegen kann, auch die Auswerteelektronik integriert, die um die mechanische Struktur herum angeordnet ist. Der gesamte Chip hat eine Größe von ca. 2 * 2 mm², das hermetisch dichte Gehäuse ist etwa 5 * 6 mm² groß. In den Abb. 5 und 6 sieht man Details der mechanischen Struktur: in Abb. 5 sind in den Ecken die vier Aufhängepunkte der seismischen Masse zu erkennen, von denen im Winkel von 45° die Federn wegführen. Abb. 6 zeigt die Differentialkondensatoren, bei denen jeweils eine bewegliche Kammelektrode flankiert wird von zwei ortsfest auf dem Chip verankerten Elektroden – die dunklen Ovale sind die Verankerungspunkte dieser Elektroden. Die Elektrodenfinger sind ca. 5 µm breit, ihr Abstand beträgt etwa 2 µm. Aus diesem Grund sind die Abbildungen auch nicht ganz scharf, da die Strukturen nur wenig größer sind als die Lichtwellenlänge – man kann diese optisch gar nicht ganz scharf abbilden. Wintersemester 2014/15 8 mechatronisches Praktikum Lehrstuhl für Messtechnik Prof. Dr. rer. nat. A. Schütze Weg- bzw. Abstandsmessung mittels Lasertriangulation Triangulieren bedeutet Abstandsmessung durch Winkelberechnung. In dem dargestellten Abstandssensor projiziert eine Laserdiode einen Laserpunkt auf das Messobjekt. Das von dort reflektierte Licht trifft abhängig von der Entfernung unter einem bestimmten Winkel auf das Empfangselement (PSD oder CCD-Zeile). Durch die Position des Lichtpunktes auf dem Empfangselement und aus der Distanz von Sender zum Empfangselement wird der Abstand zum Messobjekt im Sensor berechnet. Um eine hohe Auflösung zu erzielen, wird bei einer CCD-Zeile nicht nur das Pixel mit der höchsten Intensität bestimmt, sondern durch Gauß-Fit des Laserstrahlprofils die Lage des Maximums durch Interpolation bestimmt. (Quelle: A. Schütze: Vorlesungsunterlagen zur Vorlesung Sensorik, Quelle: Glossar Micro-Epsilon, Stichwort Lasertriangulation, http://glossar.micro-epsilon.de/ UdS, 2013) Wintersemester 2014/15 9 mechatronisches Praktikum Lehrstuhl für Messtechnik Prof. Dr. rer. nat. A. Schütze Muster für Praktikumsbericht : Praktikumsbericht zum Versuch „Kalibrierung eines Beschleunigungssensors“ Namen: Gruppe: Datum: Vorbereitende Aufgaben (kurz): Bemerkung: Kopien von Wikipedia etc. werden nicht angenommen! 1. Funktionsweise der Geräte (laut Aufgabenstellung) erläutern. 2. Schwingungsgleichung und zeitabhängige Beschleunigung, verwendete Größen erklären! 3. Begriffe Frequenzgang und Empfindlichkeit erklären. 4. Funktionsprinzip des Beschleunigungssensors zusammenfassen. 5. Funktionsprinzip des Beschleunigungssensors zusammenfassen. Praktikumsdurchführung: Die gemessenen Daten sollen mit Excel ausgewertet und dargestellt werden. Die Ergebnisse werden mit einer kurzen Beschreibung des Messablaufs in den vorbereiteten Bericht eingefügt. Auswertung: Die in der Auswertung hergeleiteten und verwendeten Formeln sollen mit einer kurzen Erläuterung in den Bericht eingefügt werden. Wintersemester 2014/15 10 mechatronisches Praktikum