Numerische Mathematik für Maschinenbauer und Mechaniker
Werbung

Numerische Mathematik
für Maschinenbauer und Mechaniker
Sommersemester 2004
Jens Lang
FB Mathematik
Technische Universität Darmstadt
Grundlagen der Numerik
Literatur
Deuflhard/Hohmann:
Einführung in die Numerische Mathematik
Deuflhard/Bornemann:
Numerik gewöhnlicher Differentialgleichungen
Vorlesungsskript (pdf-file) und ausführliches Skript (eps-file):
www.mathematik.tu-darmstadt.de/ags/ag8/Lehrveranstaltungen
Übungen, Lösungen der Übungsaufgaben, Beispielprogramme:
www.mathematik.tu-darmstadt.de/ags/ag8/Lehrveranstaltungen
Numawww:
http://numawww.mathematik.tu-darmstadt.de:8081/
Grundlagen der Numerik
1
Inhaltsverzeichnis
1. Interpolation
– Polynominterpolation
– Splineinterpolation
2. Numerische Differentiation und Integration
– Numerische Differentiation
– Numerische Integration
3. Lösung linearer Gleichungssysteme
– Gauß–Algorithmus, Cholesky–Verfahren
– Gauß–Seidel– und Jacobi–Verfahren
Grundlagen der Numerik
2
4. Lösung nichtlinearer Gleichungssysteme
– Fixpunktiteration
– Newton–Verfahren
5. Numerische Berechnung von Eigenwerten
6. Finite–Differenzen–Verfahren
– Gewöhnliche Differentialgleichungen
– Partielle Differentialgleichungen
Grundlagen der Numerik
3
Interpolation und Approximation
Rutishauser: Interpolation ist die Kunst, zwischen den Zeilen einer
Funktionstabelle zu lesen.
Interpolationsaufgabe
Geg.: Stützstellen
x0, x1, . . . , xn
zugehörige Stützwerte f0, f1, . . . , fn
Ges.:
Interpolationsfunktion
Φ(x; a0, a1, . . . , ak )
x ∈ I ⊂ R, ai reell
Φ(xi; a0, a1, . . . , ak ) = fi ,
Grundlagen der Numerik
i = 0, . . . , n
4
Interpolation und Approximation
Beispiele:
1. Polynominterpolation
Φ(x; a0, . . . , an) = a0 + a1x + . . . + anxn =
n
P
aixi .
i=0
2. Trigonometrische Interpolation
n
P
Φ(x; a0, . . . , a2n) = a0 +
(a2i−1 sin(ix) + a2i cos(ix))
i=1
Anwendungen:
Funktionsdarstellung, numerische Integration, Extrapolation, numerische Behandlung von Differentialgleichungen
Grundlagen der Numerik
5
Polynominterpolation
Algorithmen zur Auswertung eines Polynoms und seiner Ableitungen
DEF.: Πn – Menge der Polynome vom Grad ≤ n
Geg.: Πn 3 pn(x) =
n
P
aixi
i=0
Ges.: pn(x0)
Hornerschema: Ausklammern des Terms x, z.B.
a3x3 + a2x2 + a1x + a0 = ((a3x + a2)x + a1)x + a0
Grundlagen der Numerik
6
Polynominterpolation: Hornerschema
Allgemein:
Hornerschema
(1)
an := an
(1)
ai
(1)
:= ai+1x0 + ai ,
pn(x0) =
i = n − 1, . . . , 0
(1)
a0
Aufwand: n (M=Multiplikationen) + n (A=Additionen)
Grundlagen der Numerik
7
Polynominterpolation: Hornerschema
Beispiel: p4(x) = x4 − 3x3 + 2x2 + 1 ,
x0 = 2
i
4 3 2 1 0
ai
1 -3 2 0 1
x0 = 2
2 -2 0 0
(1)
ai
Grundlagen der Numerik
1 -1
0 0 1=p4(2)
8
Polynominterpolation: Hornerschema
(j)
pn (x0) , j
Ges.: Ableitungen
= 1, . . . , m ≤ n
Vollständiges Hornerschema
(0)
ai
:= ai ,
(j+1)
an
(j+1)
ai
(j)
an
(j+1)
ai+1 x0
:=
:=
(j)
(j+1)
pn (x0) = aj
Aufwand:
i = 0, . . . , n
m
P
i=0
Grundlagen der Numerik
· j! ,
)
+
(j)
ai ,
i = n − 1, . . . , j
j = 0, . . . , m
j = 0, . . . , m
(n − i) = n(m + 1) − m(m+1)
(M,A)
2
9
Polynominterpolation: Hornerschema
Beispiel: p4(x) = x4 − 3x3 + 2x2 + 1 ,
i
4
3
2
1
0
ai
x0 = 2
(0)
1
-3
2
2
-2
0
0
1
0
ai
x0 = 2
(1)
1
-1
2
0
2
0
4
1
ai
x0 = 2
(2)
1
1
2
2
6
4
ai
x0 = 2
(3)
1
3
2
8
ai
x0 = 2
(4)
1
5
(5)
1
ai
Grundlagen der Numerik
x0 = 2
=p4(2) ,→ p4(2) = 1
(1)
(1)
(2)
(2)
(3)
(3)
(4)
(4)
=p4 (2)/1! ,→ p4 (2) = 4
=p4 (2)/2! ,→ p4 (2) = 16
=p4 (2)/3! ,→ p4 (2) = 30
=p4 (2)/4! ,→ p4 (2) = 24
10
Lagrangesche Interpolation
Lagrangesche Interpolationsaufgabe
Geg.: (xi, fi) ∈ R × R, i = 0, . . . , n, paarweise verschiedene xi
Ges.: Πn 3 pn(x) = a0 + a1x + . . . + anxn : pn(xi) = fi ∀i
Geometrische Interpretation
f1
6
fn−1
fn
f0
x0
x1
Grundlagen der Numerik
xn−1
xn
-
11
Lagrangesche Interpolation
SATZ: Die Lagrangesche Interpolationsaufgabe ist eindeutig lösbar.
Es gilt
pn(x) =
n
X
fiLi(x)
mit
i=0
Li(x) =
n
Y
j=0,j6=i
x − xj
.
xi − xj
Bezeichnung:
lineare (n=1)
quadratische (n=2)
kubische (n=3) Interpolation usw.
Grundlagen der Numerik
12
Lagrangesche Interpolation
Beispiel: Quadratische Interpolation, geg. (x0, f0), (x1, f1), (x2, f2)
p2(x) = L0(x)f0 + L1(x)f1 + L2(x)f2 =
(x − x1)(x − x2)
(x − x0)(x − x2)
(x − x0)(x − x1)
f0 +
f1 +
f2
(x0 − x1)(x0 − x2)
(x1 − x0)(x1 − x2)
(x2 − x0)(x2 − x1)
Vorteile der Lagrange–Darstellung:
Lj (x) sind explizit berechenbar
Nachteile:
hoher Aufwand, Berechnung von n + 1 Polynomen
gewisse Anfälligkeit gegenüber Rundungsfehler
bei Hinzunahme weiterer (xi, fi) ändert sich alles
Grundlagen der Numerik
13
Ein konkretes Beispiel:
(x0, x1, x2, x3) = (−1, 0, 2, 3)
(f0, f1, f2, f3) = (−1, 3, 11, 27)
Ansatz:
p = (−1)L0 + 3L1 + 11L2 + 27L3
Lagrange-Polynome
L0(x) =
x−0
−1−0
·
x−2
−1−2
·
x−3
−1−3
=
L1(x)
=
x−(−1)
0−(−1)
x−3
· x−2
·
0−2 0−3
=
L2(x)
=
x−(−1)
2−(−1)
x−3
· x−0
·
2−0 2−3
=
L3(x)
=
x−(−1)
3−(−1)
x−2
· x−0
·
3−0 3−2
=
Grundlagen der Numerik
1
(−x3 + 5x2 − 6x)
12
1
(+2x3 − 8x2 + 2x + 12)
12
1
(−2x3 + 4x2 − 6x)
12
1
(+x3 − x2 − 2x)
12
14
Newtonsche Interpolation
Frage: Wie können Nachteile vermieden werden?
Antwort: Newtonsche Interpolation
Rekursiver Ansatz:
pn(x) = c0 + c1(x − x0) + . . . + cn(x − x0) · . . . · (x − xn−1)
Ziel: vorteilhafte Berechnung der ci
Grundlagen der Numerik
15
Newtonsche Interpolation
DEF.: Seien (xi, fi) mit paarweise verschiedenen xi gegeben. Die
k–te dividierte Differenz (oder Steigung) f [xi, . . . , xi+k ] ist rekursiv
definiert durch
f [xi] = fi ,
i = 0, . . . , n
f [xi+1, . . . , xi+k ] − f [xi, . . . , xi+k−1]
f [xi, . . . , xi+k ] =
xi+k − xi
k = 1, 2, . . .
Praktische Berechnung mittels Differenzenschema
Grundlagen der Numerik
16
k
0
x0 f [x0] = f0
1
2
3
f [x0, x1]
x1 f [x1] = f1
f [x0, x1, x2]
f [x1, x2]
x2 f [x2] = f2
f [x0, x1, x2, x3]
f [x1, x2, x3]
f [x2, x3]
x3 f [x3] = f3
mit f [x0, x1] =
f [x1]−f [x0]
x1−x0 ,
Es gilt: ci = f [x0, . . . , xi] ,
Grundlagen der Numerik
f [x0, x1, x2] =
f [x1,x2]−f [x0,x1]
,
x2−x0
usw.
i = 0, . . . , n
17
Unser Beispiel:
(x0, x1, x2, x3) = (−1, 0, 2, 3)
(f0, f1, f2, f3) = (−1, 3, 11, 27)
Ansatz:
p(x) = c0 + c1(x + 1) + c2(x + 1)x + c3(x + 1)x(x − 2)
xi 0 1 2 3
-1 -1
0 3 4
2 11 4 0
3 27 16 4 1
⇒ p(x) = −1 + 4(x + 1) + (x + 1)x(x − 2)
Grundlagen der Numerik
18
Vorteil: Hinzunahme von (xn+1, fn+1) erfordert (nur) Berechnung
einer neuen Schrägzeile im Differenzenschema und
pn+1(x) = pn(x) + cn+1(x − x0) · . . . · (x − xn) .
Algorithmus
Newtonscher Interpolationsalgorithmus
i = 0, . . . , n : ci := fi
k = 1, . . . , n :
i = n, . . . , k :
Aufwand:
n(n+1)
2
Grundlagen der Numerik
ci − ci−1
ci :=
xi − xi−k
(D=Divisionen), n(n + 1) (A)
19
Der Interpolationsfehler
Geg.: f (x), pn(x) mit pn(xi) = f (xi) = fi, i = 0, . . . , n
Frage: Approximationsfehler? ⇒ Restglied
Rn+1(x) = f (x) − pn(x)
Abschätzung:
n
f (n+1)(ξ) Y
|f (x) − pn(x)| ≤
max
|x − xj | .
ξ∈[min xi, max xi] (n + 1)! j=0
Grundlagen der Numerik
20
Der Interpolationsfehler
Beispiele:
1. lineare Interpolation, n = 1, x0, x1 = x0 + h, x ∈ [x0, x1]
|(x − x0)(x − x1)| ≤ |(x0 + h/2 − x0)(x0 + h/2 − x1)| =
h2
4
(Maximum wird im Mittelpunkt angenommen!)
⇒ |f (x) − p1(x)| ≤
h2
8
maxx∈[x0,x1] |f (2)(x)|
2. f (x) = sin(2πx), [a, b] = [0, 1], n = 6, äquidistant
maxx∈[0,1] |f (7)(x)/7!| = 76.706,
6
Q
x ∈ [0, 1] ⇒ (x − xi) ≤ 3.43 · 10−4
i=0
|R7(x)| ≤ 2.63 · 10−2, Err ≈ 1.89 · 10−2
Grundlagen der Numerik
21
Der Interpolationsfehler
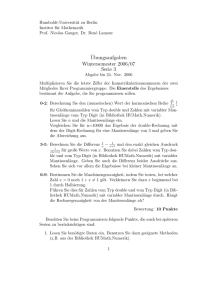
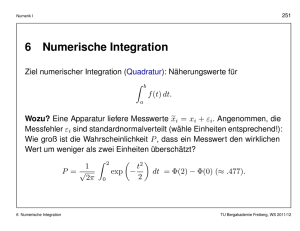
Ein weiteres Beispiel: Die Runge–Funktion
Ziel: Konstruktion eines Interpolationspolynoms 10. Grades
3.
f (x) = (1 + x2)−1, [a, b] = [−5, 5], n = 10
3.a
äquidistante Stellen
xi = −5 + i, i = 0, . . . , 10
3.b Tschebyscheff–Knoten
2(10 − i) + 1
xi = 5 cos
π , i = 0, . . . , 10
22
Grundlagen der Numerik
22
Grundlagen der Numerik
23
Splineinterpolation
Idee: Einteilung eines großen Intervalls [a, b] in kleine Teilintervalle,
fester Interpolationsgrad m + Verhaftungsbedingungen (Glattheit!)
DEF.: Sei Zn : a = x0 < x1 < . . . < xn = b eine Zerlegung des
Intervalls [a,b].Dann heißt
Sm(Zn) := {s ∈ C m−1[a, b] : s|[xi,xi+1] ∈ Πm}
der (lineare) Raum aller Splinefunktionen vom Grad m zur Zerlegung Zn.sf ∈ Sm(Zn) heißt interpolierender Spline zu Daten
(xi, fi), i = 0, . . . , n, falls sf (xi) = fi.
Grundlagen der Numerik
24
Splineinterpolation
Beispiel: praktisch wichtige Splines
1. m = 1: lineare Splines → Lösen von PDEs mittels FE
2. m = 3: kubische Splines.
Menschliches Auge nimmt Krümmung wahr → C 2–stetige Splines
werden als ‘glatt’ wahrgenommen.
Bemerkung: Spline = (Holz–)Feder, biegsamer Stab, mit dem Handwerker Kurven wechselnder Krümmung zeichnen.
Grundlagen der Numerik
25
Lineare Splineinterpolation
lineare Splineinterpolation = stückweise lineare Interpolation
Geometrische Interpretation:
fj+1
HH
HH
H
H
PP
PP
P
P
fj
xj
xj+1
-
Beobachtung: sf (x) ∈ C[a, b] ist eindeutig bestimmt durch Interpolationseigenschaft
Grundlagen der Numerik
26
Lineare Splineinterpolation
Basisdarstellung: lineare B–Splines = Hütchen–Funktionen
x − xi−1
x − xi−1
i
xi+1 − x
φi(x) :=
xi+1 − xi
0
für x ∈ [xi−1, xi]
für x ∈ [xi, xi+1]
sonst
, i = 0, . . . , n,
wobei x−1 < a und xn+1 > b beliebig gewählte Hilfspunkte sind.
Grundlagen der Numerik
27
Lineare Splineinterpolation
Dann gilt
sf (x) =
n
P
fiφi(x)
i=0
Anwendungsbeispiel: zusammengesetzte Trapezregel
Rb
a
f (x)dx ≈
Grundlagen der Numerik
Rb
a
sf (x)dx =
Pn−1 xi+1−xi
i=0
2
(f (xi) + f (xi+1)),
28
Kubische Splineinterpolation
Ziel: Glatte Approximation, d.h. sf ∈ C 2[a, b]
Ansatz: si(x) = ai +bi(x−xi)+ c2i (x−xi)2 + d6i (x−xi)3, x ∈ [xi, xi+1] .
Verhaftungsbedingungen:
si(xi+1) = si+1(xi+1) ,
s0i(xi+1) = s0i+1(xi+1) , i = 0, . . . , n − 2
00
00
si (xi+1) = si+1(xi+1) ,
(V )
Jetzt: Bestimmung des interpolierenden kubischen Splines sf zu den
Stützpunkten (xi, fi), i = 0, . . . , n.
Grundlagen der Numerik
29
Bedingungen:
1. Interpolationsbedingungen
2. Verhaftungsbedingungen (V)
n+1
3(n-1)
4n-2
Anzahl der Parameter (ai, bi, ci, di)
4n
Verbleibende 2 Freiheitsgrade ⇒ zusätzliche Randbedingungen:
(N) Natürliche Randbedingungen: s00f (a) = s00f (b) = 0
⇒ natürliche Splines mit minimaler Krümmung
(H) Hermite–Randbedingungen: s0f (a) = f 0(a), s0f (b) = f 0(b)
mit gegebenen f 0(a), f 0(b) ∈ R ⇒ verbesserte Approximation
(P) Periodische Randbedingungen: s0f (a) = s0f (b), s00f (a) = s00f (b)
sinnvoll, wenn f periodische Funktion
Grundlagen der Numerik
30
Konvergenzverhalten von Splines
Bei Spline–Interpolation stellt sich die Konvergenzfrage anders als bei
klassischer Polynominterpolation. Es wird nicht eine Folge von Splines
mit wachsendem Grad, sondern die Folge von Splines mit festem Grad
bei wachsender Knotenanzahl betrachtet. Das führt zu wesentlich besseren Konvergenzaussagen.
Grundlagen der Numerik
31
Konvergenzverhalten von Splines
Linearer Spline, äquidistante Stützstellen:
SATZ: Sei h := (b − a)/n, xi := a + ih und fi := f (xi) mit f ∈
C 2[a, b]. Dann gilt für den interpolierenden linearen Spline sf ∈ C[a, b]
h2
max |f (x) − sf (x)| ≤
M2 ,
8
x∈[a,b]
0
max |f (x) −
x∈[a,b]
s0f (x)|
h
≤ M2 ,
2
mit
M2 := maxx∈[a,b] |f 00(x)| und s0f (xi) := 21 s0f (xi − h2 ) + s0f (xi + h2 )
Beachte: s0f ist Treppenfunktion.
Grundlagen der Numerik
32
Konvergenzverhalten von Splines
SATZ: Sei f ∈ C 4[a, b] und sf der interpolierende kubische Spline zu
(xi, fi), i = 0, . . . , n, mit a = x0 < x1 < . . . < xn = b und
s0f (a) = f 0(a) ,
s0f (b) = f 0(b).
Dann gilt für j = 0, 1, 2
(j)
max |f (j)(x) − sf (x)| ≤ 2 h4−j M4
x∈[a,b]
mit M4 := maxx∈[a,b] |f (4)(x)| und h := maxi |xi+1 − xi|.
Bemerkung: Approximationseigenschaften im Fall (N) und (P) weniger
gut, höhere Fehlerkonstante
Grundlagen der Numerik
33
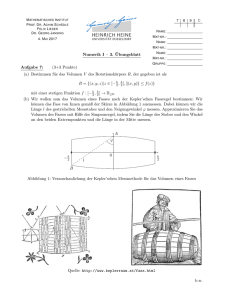
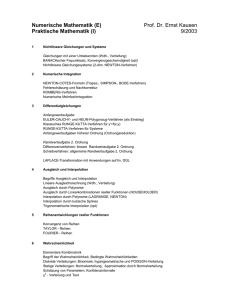
Splines versus Polynom
Beispiel: kubischer Hermit-Spline für Runge–Beispiel mit n = 10.
Grundlagen der Numerik
34
Numerische Differentiation und Integration
Geg.:
Diskrete Daten (xi, fi) einer Funktion f (x) mit paarweise verschiedenen Knoten xi ∈ [a, b], oder auch analytische Darstellung von f (x).
Ges.:
1. Näherungen für f 0(xi) (oder auch f 0(x), x ∈ [a, b])
Z b
2. Näherung für I(f ) =
f (x)dx
a
Grundprinzip:
(xi, fi) ⇒ Konstruktion einer Interpolationsfunktion Φ ⇒
f 0(x) ≈ Φ0(x), I(f ) ≈ I(Φ).
Grundlagen der Numerik
35
Numerische Differentiation
Idee: (xi, fi), i = 0, . . . , n ⇒ pn(x) ≈ f (x).
Verwende Lagrangesches Interpolationspolynom
pn(x) =
n
X
fj Lj (x) mit Lj (x) =
j=0
n
Y
k=0,k6=j
x − xk
,
xj − xk
j = 0, . . . , n.
und damit
0
f (x) ≈
p0n(x)
=
n
P
j=0
Grundlagen der Numerik
fj L0j (x) .
36
Numerische Differentiation
Jetzt: lokale Anwendung der Lagrangeschen Interpolation
Lineare Interpolation: (xi, fi), (xi+1, fi+1), n = 1
x − xi+1
x − xi
p1(x) = fiLi + fi+1Li+1 =
fi +
fi+1
xi − xi+1
xi+1 − xi
⇒
p01(x)
Grundlagen der Numerik
1
1
fi+1 − fi
=
fi +
fi+1 =
xi − xi+1
xi+1 − xi
xi+1 − xi
37
Numerische Differentiation
Vorwärts–Differenzenquotient
0
f (xi) ≈
p01(xi)
fi+1 − fi
=
xi+1 − xi
Rückwärts–Differenzenquotient
0
f (xi+1) ≈
Grundlagen der Numerik
p01(xi+1)
fi+1 − fi
=
xi+1 − xi
38
Numerische Differentiation
Quadratische Interpolation:
(xi−1, fi−1), (xi, fi), (xi+1, fi+1), n = 2
(a) Approximation der ersten Ableitung
p2(x) = fi−1Li−1 + fiLi + fi+1Li+1
(x − xi)(x − xi+1)
(x − xi−1)(x − xi+1)
=
fi−1 +
fi
(xi−1 − xi)(xi−1 − xi+1)
(xi − xi−1)(xi − xi+1)
(x − xi−1)(x − xi)
+
fi+1
(xi+1 − xi−1)(xi+1 − xi)
Grundlagen der Numerik
39
Numerische Differentiation
p02(x)
2x − xi − xi+1
2x − xi−1 − xi+1
=
fi−1 +
fi
(xi−1 − xi)(xi−1 − xi+1)
(xi − xi−1)(xi − xi+1)
2x − xi−1 − xi
fi+1
+
(xi+1 − xi−1)(xi+1 − xi)
0
f (xi) ≈
p02(xi)
xi+1 − xi
= −
fi−1
(xi+1 − xi−1)(xi − xi−1)
1
1
−
fi
+
xi − xi−1 xi+1 − xi
xi − xi−1
+
fi+1
(xi+1 − xi−1)(xi+1 − xi)
Grundlagen der Numerik
40
Numerische Differentiation
Spezialfall:
Äquidistante Stützstellen, Schrittweite h
Zentraler Differenzenquotient
0
f (xi) ≈
p02,h(xi)
fi+1 − fi−1
=
2h
Beachte:
Bei nicht äquidistanten Stützstellen ist p02(xi) eine echte Linearkombination von fi−1, fi, fi+1.
Grundlagen der Numerik
41
Numerische Differentiation
(b) Approximation der zweiten Ableitung
Newtonsches Interpolationspolynom
p2(x) = f [xi−1] + f [xi−1, xi](x − xi−1)
+ f [xi−1, xi, xi+1](x − xi−1)(x − xi)
p002 (x) = const. = 2f [xi−1, xi, xi+1]
f 00(xi) ≈ p002 (xi) = 2f [xi−1, xi, xi+1]
Grundlagen der Numerik
42
Numerische Differentiation
Spezialfall:
Äquidistante Stützstellen, Schrittweite h
Zentraler Differenzenquotient 2.Ordnung
fi+1 − 2fi + fi−1
⇒ f (xi) ≈ 2f [xi−1, xi, xi+1] =
h2
00
Frage:
Wie genau sind die Approximationen für die Ableitungen?
Grundlagen der Numerik
43
Numerische Differentiation
SATZ: Sei f ∈ C 2[a, b]. Für konstante Schrittweite gilt dann
fi+1 − fi
f (xi) −
= C h,
h
0
und
fi − fi−1
f (xi) −
= C h.
h
0
Wenn f ∈ C 4[a, b], dann
fi+1 − fi−1
f (xi) −
= C h2 .
2h
0
Bemerkung:
Verallgemeinerung auf partielle Ableitungen ist möglich.
Grundlagen der Numerik
44
Numerische Integration
Bezeichnung:
numerische Integration = Quadratur
Aufgabe:
Berechne
I(f ) = Iab(f ) =
Zb
f (x)dx
a
mit f (x) (stückweise) stetig in [a, b].
Grundlagen der Numerik
45
Numerische Integration
Prinzip der numerischen Quadratur:
1. Unterteilung des Intervalls [a, b] in N Teilintervalle
[xm, xm+1], hm = xm+1 − xm, m = 0, . . . , N − 1.
2. Berechnung der Näherung Iˆm(f ) ≈ Im(f ) =
R xm+1
xm
f (x)dx.
PN −1 ˆ
ˆ
3. Summation über alle Intervalle I(f ) ≈ I(f ) = m=0 Im(f ).
Frage: Wie Iˆm(f ) und hm wählen, so dass hohe Genauigkeit bei
möglichst geringer Anzahl von Funktionsauswertungen.
Grundlagen der Numerik
46
Interpolationsquadratur: Die Newton–Cotes–Formeln
Ansatz: Iˆm(f ) = Im(pn(x)),
wobei pn(x) Interpolationspolynom vom Grad n.
Realisierung: Setze h := hm. Wähle n + 1 paarweise verschiedene
Stützstellen (Knoten) xm + cih ∈ [xm, xm + h], 0 ≤ ci ≤ 1, i =
0, . . . , n. Berechne f (xm + cih) und setze
pn(x) =
n
X
Li,n(x)f (xm + cih)
i=0
mit
Li,n(x) =
n
Y
k=0,k6=i
Grundlagen der Numerik
x − xm − ck h
=
xm + cih − xm − ck h
n
Y
k=0,k6=i
x − xm − ck h
.
h(ci − ck )
47
Damit
Im(f ) ≈ Im(pn(x)) =
xZ
m +h n
X
xm
=
n
X
i=0
Li,n(x)f (xm + cih)dx
i=0
xZ
m +h
Li,n(x)dx f (xm + cih)
xm
und insbesondere
xZ
m +h
Li,n(x)dx
xm
m
t:= x−x
h
Z1
=
0
Z1
n
Y
t − ck
Li,n(xm+th)h dt = h
dt
ci − ck
k=0,k6=i
|0
{z
}
wi
⇒ Interpolationsquadratur–Formel auf [xm, xm + h]
Grundlagen der Numerik
48
Interpolationsquadratur: Die Newton–Cotes–Formeln
Im(f ) ≈ Iˆm(f ) = h
n
P
wif (xm + cih) .
i=0
Beachte: Gewichte wi = wi(c0, . . . , cn) unabhängig von f ⇒ einmalige Berechnung der wi.
Eigenschaften:
1. Iˆm(f ) ist linear in f .
2. ∀pk (x) ∈ Πk mit k ≤ n: Iˆm(pk ) = Im(pk )
⇒ exakte Integration für Polynome vom Grad k ≤ n.
Pn
Pn
ˆ
Insbesondere: f (x) = 1 ⇒ h = Im(1) = h i=0 wi ⇒ i=0 wi = 1.
Grundlagen der Numerik
49
Interpolationsquadratur: Die Newton–Cotes–Formeln
Newton–Cotes–Formeln:
äquidistante Stützstellen ci = i/n, i = 0, . . . , n.
Beispiel:
n = 1 ⇒ c0 = 0, c1 = 1
⇒ w0 =
R 1 t−1
0 −1
dt = − 12 (t − 1)2|10 =
⇒ w1 = 1 − w0 =
⇒
1
2
1
2
Iˆm(f ) = h2 (f (xm) + f (xm + h)),
Grundlagen der Numerik
Trapezregel.
50
Interpolationsquadratur: Die Newton–Cotes–Formeln
Newton–Cotes–Formeln
n
wi, i = 0, . . . , n
Trapezregel
1
Simpson–Regel
2
Newton–3/8–Regel 3
Milne–Regel
4
1
2
1
6
1
8
7
90
1
2
4
6
3
8
32
90
1
6
3
8
12
90
1
8
32
90
7
90
Bemerkung: n = 8, n ≥ 10 ⇒ negative wi ⇒ Vermeidung von
negativen Näherungswerten für positive f (x) verlangt n < 8.
Grundlagen der Numerik
51
Interpolationsquadratur: Summierte Trapezregel
Spezialfall: äquidistante Punkte xm ∈ [a, b]
Summierte Trapezregel
b−a
xm = a + m ∗ h, m = 0, . . . , N, h =
N
Iˆm(f ) = h (f (xm) + f (xm+1))
ˆ )=
I(f
Grundlagen der Numerik
N
−1
X
h
ˆ
Im(f ) = f (a) + h
2
m=0
N
−1
X
h
f (xm) + f (b)
2
m=1
52
Interpolationsquadratur: Summierte Simpsonregel
Spezialfall: äquidistante Punkte xi ∈ [a, b]
Summierte Simpsonregel
h
b−a
xi = a + i ∗ , i = 0, . . . , 2 ∗ N, h =
2
N
h
ˆ
Im := [x2m, x2m+2], Im(f ) = (f (x2m) + 4 f (x2m+1) + f (x2m+2))
6
N
−1
X
h
ˆ )=
I(f
Iˆm(f ) =
(f (x2m) + 4 f (x2m+1) + f (x2m+2))
6 m=0
m=0
N
−1
X
Grundlagen der Numerik
53
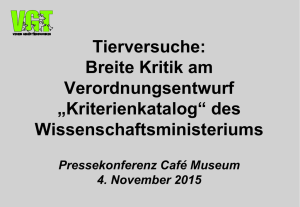
Beispiel:
Rπ
sin(x) dx
0
Grundlagen der Numerik
54
Beispiel:
R1
−1
Grundlagen der Numerik
1
0.01+x2
dx
55
Interpolationsquadratur: Der Quadraturfehler
Ges.: Abschätzung für den Quadraturfehler En,m(f ) := Im(f )− Iˆm(f )
Quadraturfehler = Integral des Interpolationsfehlers, da
xZ
m +h
xZ
m +h
(f (x) − pn(x)) dx =
En,m(f ) =
Rn+1(x) dx
xm
xm
Damit
Mn+1
|En,m(f )| ≤
(n + 1)!
xZ
m +h n
Y
xm
Mn+1 n+1
(x
h.
m − cih)
| − x{z
} dx ≤ (n + 1)! h
i=0
≤h
mit
Mn+1 :=
Grundlagen der Numerik
max
|f (n+1)(x)|
x∈[xm,xm+h]
56
Interpolationsquadratur: Genauigkeitsgrad
Jetzt: Charakterisierung der Güte der Quadraturformel mittels Genauigkeitsgrad.
DEF.: Eine Quadraturformel besitzt den Genauigkeitsgrad q ∈ N, falls
Iˆm(pk ) = Im(pk ) , ∀pk ∈ Πk , 0 ≤ k ≤ q, aber Iˆm(pq+1) 6= Im(pq+1)
für mindestens ein pq+1 ∈ Πq+1.
SATZ: Zu beliebig vorgegebenen n + 1 paarweise verschiedenen
Stützstellen xm + cih, 0 ≤ c0 ≤ c1 ≤ . . . , cn ≤ 1, existiert eine eindeutige Interpolationsquadratur–Formel, deren Genauigkeitsgrad
mindestens n ist.
Grundlagen der Numerik
57
Interpolationsquadratur: Genauigkeitsgrad
SATZ: Sei f ∈ C n+1[a, b].Dann gilt für jede Quadraturformel mit
dem Genauigkeitsgrad q
En,m(f ) = Im(f ) − Iˆm(f ) = C hq+2
m
und
ˆ )=
I(f ) − I(f
Zb
f (x) dx −
a
N
−1
X
m=0
hm
n
X
wif (xm + cihm) = C h̃q+1
i=0
mit hm := xm+1 − xm und h̃ := maxm hm.
Bemerkung: Durch Summation geht eine h–Potenz verloren im Vergleich zum Intervall [xm, xm + hm].
Grundlagen der Numerik
58
Interpolationsquadratur: Genauigkeitsgrad
LEMMA: Für den Genauigkeitsgrad q der Newton–Cotes–Formeln gilt
q=
n
für n ungerade,
n + 1 für n gerade.
Beispiele: äquidistante Punkte
1. Trapezregel:
ˆ ) = C h2
n = 1 ⇒ I(f ) − I(f
2. Simpsonregel:
ˆ ) = C h4
n = 2 ⇒ I(f ) − I(f
Bemerkung: Simpsonregel ist zwei Ordnungen besser als Trapezregel,
was ihre hohe Popularität begründet.
Grundlagen der Numerik
59
Interpolationsquadratur: Gaußsche Quadraturformeln
Bisher: Knoten vorgegeben, dazu Gewichte bestimmt.
Jetzt: Sowohl Knoten ci als auch Gewichte wi so wählen, daß die
Quadraturformel einen möglichst hohen Genauigkeitsgrad besitzt.
Frage: maximales q mit
Im(pq ) = Iˆm(pq ) = h
n
X
wipq (xm + cih) .
i=0
Vermutung: 2n + 2 Parameter ⇒ q = 2n + 1
Grundlagen der Numerik
60
Interpolationsquadratur: Gaußsche Quadraturformeln
SATZ: Der Genauigkeitsgrad einer Quadraturformel
Iˆm(f ) = h
n
X
wif (xm + cih)
i=0
mit n + 1 Knoten ist höchstens 2n + 1.
SATZ: Es existiert genau eine Quadraturformel
Iˆm(f ) = h
n
X
wif (xm + cih) ,
ci ∈ [0, 1] ,
i=0
die den maximalen Genauigkeitsgrad 2n + 1 besitzt.
Grundlagen der Numerik
61
Interpolationsquadratur: Gaußsche Quadraturformeln
Die Knoten sind die paarweise verschiedenen Nullstellen des (n + 1)–
ten verschobenen Legendre–Polynoms
dn+1 n+1
1
n+1
pn+1(x) =
[x
(x
−
1)
],
n+1
(n + 1)! dx
und die Gewichte sind gegeben durch
Z1
wi =
0
Grundlagen der Numerik
n
Y
k=0,k6=i
x − ck
ci − ck
2
dx ,
i = 0, . . . , n.
62
Interpolationsquadratur: Gaußsche Quadraturformeln
n q
0
1
1
3
2
5
Grundlagen der Numerik
Gauß–Legendre–Quadraturformeln
ci, i = 0, . . . , n
wi, i = 0, . . . , n
1
1
2√
√
3− 3 3+ 3
1
1
6√
6
2
2
√
5 − 15
1
5 + 15 5
8
5
10
2
10
18 18
18
63
Interpolationsquadratur: Gaußsche Quadraturformeln
Bemerkung: Knoten ci liegen alle im Intervallinnern. Bei manchen
Aufgabenstellungen (z.B. numerische Behandlung von Differentialgleichungen) ist es vorteilhaft, einen oder beide Intervallendpunkte mit in
die Knotenmenge zu nehmen.
Gauß–Radau–Formeln: + ein Intervallendpunkt ⇒ q = 2n
Gauß–Lobatto–Formeln: + beide Intervallendpunkte ⇒ q = 2n − 1
Grundlagen der Numerik
64