Kapitel 3 Kontinuumsphysik ausgewählter elektrodynamischer
Werbung

Kapitel 3
Kontinuumsphysik ausgewählter
elektrodynamischer Probleme
3.1
Ziele
Eine große Klasse von Materialien ist nicht nur Träger von Masse, sondern
auch von elektrischer Ladung. Die hierdurch erzeugten Phänomene sind
Gegenstand der Elektrodynamik.
Ältere Anwendungen der Elektrodynamik sind
• Konstruktion von Elektromotoren und die Erzeugung hochfrequenter
Wellen für die Nachrichtenübertragung
• Konstruktion von Halbleiterschaltkreisen
Besonders wichtig in neuerer Zeit sind Anwendungen in den Bereichen
• Herstellung von Solarsilizium. Hier werden sehr heiße Siliziumschmelzen durch wandernde Magnetfelder homogenisiert.
• Herstellung von Brennstoffzellen und von Lithium-Ionen- Batterien.
Dieses Kapitel ist eine Einführung in die elektrodynamische Theorie. Deren
Basis sind die MAXWELLschen Gleichungen, die analog zu den Bilanzgleichungen für Masse, Impuls und Energie von universell gültiger Natur sind.
Aber auch die MAXWELLschen Gleichungen müssen durch Materialgleichungen ergänzt werden, was wir hier im Kontext der genannten modernen
Anwendungen tun.
63
3.2
Die MAXWELLschen Gleichungen
Grundsätzliches und Historisches. Entdeckt wurden elektrodynamische Kräfte durch Experimente mit kleinen elektrisch geladenen Teilchen.
Deren Ladung induziert zwei unterschiedliche Felder, die sich durch Kraftwirkungen zwischen geladenen Teilchen bemerkbar machen. Die beiden Felder werden durch Funktionen von Zeit und Raum modelliert und heißen
elektrische Feldstärke und magnetische Induktion.
Allerdings wurde zunächst nicht gesehen, dass elektrisch geladene Teilchen
auch ein magnetisches Feld erzeugen. In dieser Periode der elektrodynamischen Theorie gab es zwei getrennte Bereiche: Elektrisch geladenen Teilchen
und magnetisch geladener Materie. Die jeweiligen Kräfte zwischen elektrischen Teilchen bzw. zwischen Magneten wurden getrennt untersucht.
Nach Etablierung des Atoms mit innerer Struktur als Grundbaustein der
makroskopischen Materie, und insbesondere nach Aufstellung der speziellen Relativitätstheorie ist klar, dass magnetisches und elektrisches Feld
eine Einheit im elektromagnetischen Feld bilden. Es gibt keine magnetische
Materie. Es gibt ausschließlich elektrische Ladungen. Die Relativgeschwindigkeit zwischen Beobachter und Ladung entscheidet, ob ein elektromagnetisches Feld als elektrisch oder als magnetisch interpretiert wird oder ob
beide Anteile vorhanden sind.
Die Vermessung der Kräfte durch die resultierenden Bewegungungen von
geladenen Teilchen in elektromagnetischen Feldern führte schließlich zur
Aufstellung der elektrodynamischen Theorie.
MAXWELL
schuf die vier
Gleichungen, die
seinen
Namen
tragen,
mittels
aberwitzigster
Motivationen. Insbesondere führte
er einen mechanistischen Äther
mit Wirbeln und
Rädern ein, der
seit 110 Jahren
wieder abgeschaft
ist. Überraschender Weise aber
konstituieren die
MAXWELLschen
Gleichungen die
am besten bestätigte Theorie der
Physik .
Die Grundgleichungen der Elektrodynamik sind die MAXWELLschen Gleichungen. Es wurde schnell erkannt, dass diese Gleichungen, die durch das
Studium von diskreten geladenen Teichen gewonnen wurden, auch die elektromagnetischen Vorgängen in kontinuierlichen Materialien beschreiben.
Dieser Bereich wird im Folgenden im Vordergrund stehen.
Die elektrische Ladung. Das Studium von Experimenten mit gewissen
Materialien hat die Existenz von elektrischer Ladung aufgezeigt. Obwohl
elektrische Ladungen besonders einfache Eigenschaften haben, ergab sich
zur Zeit ihrer Entdeckung noch ein verwirrendes Bild. Hauptsächlich, weil
der Aufbau der Materie aus Atomen noch nicht bekannt war. Heutzutage
ist das Schema der Natur in diesem Kontext aber sehr einfach.
Atome als Teilchen betrachtet sind elektrisch neutral, sie bestehen aber aus
positiv geladenen Kernen und einer gleich großen aber negativ geladenen
Ladungsmenge. Die Träger der negativen Ladungen sind die Elektronen,
64
welche die Hülle des Atomkerns bilden. Das einzelne Elektron ist Träger der
Elementarladung −e0 . Elektronen können weder erzeugt noch vernichtet
werden.
Atome können sich zu Molekülen oder direkt zu makroskopischen Materialien verbinden. Global gesehen sind die makroskopischen Körper ungeladen.
Jedoch können die in den Körpern enthaltenen positiven und negativen Ladungsbestandteile getrennt werden, so dass lokal eine der beiden Ladungssorten überwiegt. Auf der makroskopischen Skala gibt es im wesentlichen
drei Methoden der Ladungstrennung:
1. Durch Anwesenheit eines elektromagnetischen Feldes.
2. Durch Zerfall eines Körpers in elektrisch geladene Teilkörper, was
beispielsweise in einer wässrigen Lösung passieren kann.
3. Durch mechanische Reibung. Hierdurch lassen sich nämlich aus manchen Materialien die Elektronen der äußeren Atomhülle sehr einfach
entfernen und werden dabei auf den reibenden Körper übertragen.
Übung 3.1 Konsultiere ein Buch zur experimentellen Bestimmung der elektrischen Ladung.
a.) Erläutere die historischen Meßverfahren zur
Quantifizierung der Ladung eines Körpers. Beachte hierbei, dass die Ladung zunächst über eine
Kraftmessung und später über eine Strommessung
bestimmt wurde.
b.) Erläutere das historische Umfeld der Dimension der elektrischen Ladung. Beschreibe insbesondere den Unterschied zwischen der elektrostatischen und der elektrodynamischen Ladungseinheit, und stelle einen Zusammenhang zu der heutigen Ladungseinheit COULOMB her.
Dies alles fassen wir noch einmal zusammen.
65
Die Eigenschaften der elektrischen Ladung:
1. Ein Körper kann neben seiner Masse eine elektrische Ladung besitzen.
2. Es gibt zwei unterschiedliche Sorten von elektrischer Ladung.
3. Die elektrische Ladung ist charakterisiert durch einen Betrag und
ein Vorzeichen. Wir sprechen deshalb von positiver und negativer
elektrischer Ladung.
4. Der Betrag einer elektrische Ladung ist immer ein ganzzahliges Vielfaches einer Grundladung, die wir Elementarladung nennen. In modernen Einheiten hat die Elementarladung den Wert
e0 = 1.602 10−19 COULOMB (C),
(3.1)
wobei ein COULOMB gleich einer AMPERE×Sekunde ist, also 1
C=1 As.
5. Ein ungeladener Körper hat gleiche Mengen an positiven und negativen Ladungen.
6. Die elektrische Ladung eines Körpers ist eine additive Größe.
7. Die Ladung eines abgeschlossenen Körpers ist eine Erhaltungsgröße.
Sie kann weder erzeugt noch vernichtet werden, sondern kann nur
von einem Ort zu einem anderen Ort fließen.
Die elektromagnetische Kraft. Ein elektrisch geladenes Teilchen erfährt
eine elektromagnetische Kraft K, welche durch andere Teilchen erzeugt
wird. Das Teilchen selbst ist aber auch Erzeuger einer solchen Kraft.
Zur Vermessung der Kraft ist es nützlich die beiden Phänomene zu trennen.
Zu diesem Zweck wird ein sogenanntes Probeteilchen eingeführt. Hierunter
verstehen wir ein kleines Teilchen, d.h. ein Massepunkt, mit Masse m und
Ladung ze0 , dessen erzeugtes Kraftfeld vernachlässigt werden kann.
Die Vermessung der Kraft geschieht über die Vermessung der Bewegung
x(t) des Probeteilchens in einem elektromagnetischen Feld. Für kleine Geschwindigkeiten des Probeteilchens relativ zum felderzeugenden Körper gilt
die NEWTONsche Bewegungsgleichung
m
d2 x
= K.
dt2
66
(3.2)
Durch experimentelle Auswertung der linken Seite dieser Gleichung läßt
sich dann eine Darstellung der elektromagnetischen Kraft gewinnen. Es
hat sich herausgestellt, dass das Kraftfeld aus zwei Anteilen von unterschiedlicher Struktur besteht:
K = ze0 (E(t, x) +
dx
× B(t, x)).
dt
(3.3)
Diese Kraft heißt LORENTZ Kraft und die hier auftretenden neuen Größen
haben die Namen
• E - elektrische Feldstärke
• B - magnetische Flussdichte oder magnetische Induktion
Aufgrund der bereits vorhandenen Einheiten von Kraft und Ladung, NEWTON (N) bzw. COULOMB (C), liegen die Einheiten der elektromagnetischen Felder fest:
[E] =
V
N
=
C
m
und [B] =
N
Vs
= 2,
Cm/s
m
Hendrik Antoon
Lorentz besaß bereits vor Einstein
die formale Struktur der speziellen
Relativitätstheorie. Fast alle seine
Resultate
aber
interpretierte er
falsch .
(3.4)
wobei meistens die Einheit VOLT (V) anstelle von Nm/C genommen wird.
Der Betrag der Geschwindigkeit des Probeteilchens wird ausschließlich von
der elektrischen Feldstärke geändert. Über das Magnetfeld kann nur die
Richtung der Geschwindigkeit geändert werden kann. Durch skalare Multiplikation der Bewegungsgleichung mit der Geschwindigkeit folgt nämlich
m d dx 2
dx
( ) = ze0
· E.
2 dt dt
dt
(3.5)
Als nächstes betrachten wir den Spezialfall wo das felderzeugende Teilchen
mit der Ladung z1 e0 die gleiche Größenordnung wie das Probeteilchen hat.
Falls außerdem kein Magnetfeld vorliegt, dann zeigen Messungen bei kleinen Relativgeschwindigkeiten der beiden Teilchen das einfache Gesetz
K=f
ze0 z1 e0
r,
r3
also E = f
z1 e0
r.
r3
(3.6)
Hier ist r der Abstandsvektor der beiden Teilchen. Die Größe f stellt sich
als eine Naturkonstante heraus. Im hier verwendeten Einheitensystem gilt
f = 9 109 Vm/C. Die Kraft (3.6)1 heißt COULOMB Kraft.
67
Charles Augustin
de Coulomb war
ein
unglaublich
vielseitiger
Forscher,
wie
er
heute nicht mehr
angetroffen wird .
Zur Illustration der möglichen Bahnkurven eines geladenen Probeteilchens
in vorgegebenen elektromagnetischen Feldern, betrachten wir zwei Beispiele.
Übung 3.2 Ein Probeteilchen mit Masse m und elektrischer
Ladung e bewegt sich in einem konstanten homogenen Magnetfeld B = (0, 0, B). Zerlege die Geschwindigkeit des Teilchens in Komponenten parallel und senkrecht zu B, d.h. υ = υ || + υ ⊥ .
a.) Zeige, dass gilt
υ || = konstant und |υ ⊥ | = konstant.
(3.7)
b.) Leite eine Beziehung her zwischen dem Krümmungsradius der Bahnkurve und |υ ⊥ |. Diskutiere
die Bewegung.
Übung 3.3 Ein Probeteilchen mit Masse m und elektrischer
Ladung e bewegt sich in einem konstanten homogenen elektromagnetischen Feld (E, B).
a.) Betrachte zunächst nur eine Komponente E ||
parallel zu B und gib die Bahnkurve an.
b.) Nimm an E · B = 0. Zeige, dass sich das Problem über den Ansatz
υ = υE + υ1
mit υ E =
E×B
B2
(3.8)
reduzieren läßt auf das Problem
mυ̇ 1 = eυ 1 × B.
(3.9)
c.) Berechne die Bahnkurve und erläutere das Resultat.
Phänomenologische Beschreibung der elektrischen Ladung von
kontinuierlichen Körpern. In dieser Vorlesung über Kontinuumsphysik haben wir bisher nur 1-Stoff-Systeme behandelt. Kontinuierliche Körper mit elektrischen Ladungen sind aber grundsätzlich Mehr-Stoff-Systeme.
Zur Illustration betrachten wir drei Beispiele.
68
Ein Kuperdraht besteht aus einem festen Kristallgitter, welches von positiv
geladenen Kupferionen (Cu+ ) gebildet wird. In dieser Umgebung gibt es
die leicht beweglichen (Leitungs-) Elektronen (e− ). Kupfer ist also ein 2Stoff-System.
Eine metallische Siliziumschmelze (Si) besteht aus positiv geladenen Siliziumatomen Si+ und Elektronen e− . Auch hier haben wir es mit einem
2-Stoff-System zu tun.
Wenn wir Kochsalz (NaCl) in Wasser (H2 O) geben, zerfällt das Salz in
seine geladenen Bestandteile Na+ und Cl− . Grob gesehen besteht der Gesamtkörper also aus drei Komponenten: Ungeladenes Wasser, positiv geladene Natriumionen und negativ geladene Clorionen. Dieser Körper heißt
Elektrolyt und ist ein 3-Stoff-System. Allerdings zeigt eine genauere Untersuchung, dass auch ein kleiner Teil der Wassermoleküle in Ionen zerfallen,
nämlich in positive H+ Ionen und negative OH− Ionen. Es liegt also eigentlich ein 5-Stoff-System vor.
Die Ladungen der drei Beispiele werden wir in Zukunft freie Ladungen (F)
nennen. Es gibt aber noch einen weiteren Ladungstyp. Dieser ist fest an die
neutralen Atome bzw. neutralen Moleküle gebunden und heißt Polarisationsladung (P). Beispielsweise kann es passieren, dass sich der Atomkern
aufgrund eines äußeren elektrischen Feldes gegen seine Hülle verschiebt.
Dadurch gibt es im Atom zwei getrennte Ladungszentren mit unterschiedlichem Vorzeichen. Es ist ein Dipol entstanden. Auf der Längenskala der
Atome gibt es also neue Ladungen, die makroskopisch als sogenannte Polarisationsladung in Erscheinung treten. Im gleichen Kontext gibt es ein
weiteres Phänomen, welches wir Magnetisierung nennen.
Zustandsbeschreibung einer Mischung unter dem Einfluss eines
elektromagnetischen Feldes. Als nächstes widmen wir uns der mathematischen Beschreibung von Ladungen in einem kontinuierlichen Körper.
Hierzu betrachten wir ein Gebiet Ω ⊂ 3 mit einer Mischung von N
eventuell geladenen Komponenten A1 ,A2 ,...,AN . Die Komponenten indizieren wir durch griechische Buchstaben α, β, ... ∈ {1, 2, ..., N }. Die kleinsten Teilchen der Komponenten haben Massen mα und Ladungen zα e0 mit
zα ∈ {... − 2, −1, 0, 1, 2, 3...}.
Es kann NR chemische Reaktionen geben, die wir durch i ∈ {1, 2, ..., NR }
kennzeichnen. Die Chemie charakterisiert chemische Reaktionen durch die
Schemata
ai1 A1 + ai2 A2 + ... + aiN AN ⇄ bi1 A1 + bi2 A2 + ... + biN AN .
(3.10)
Im allgemeinen laufen gleichzeitig eine Vorwärtsreaktion und eine Rück69
wärtsreaktion ab, was durch die beiden Pfeile gekennzeichnet wird. Die
Konstanten (aiα )α=1,2,...,N and (biα )α=1,2,...,N sind positive ganze Zahlen und
die Größen γαi = biα − aiα bezeichnen die stöchiometrischen Koeffizienten
der Reaktion i. Jede chemische Reaktion erhält die gesamte Masse und die
gesammte Ladung der beteiligten Komponenten. Also haben wir
N
X
mα γαi
= 0 und
α=1
N
X
zα e0 γαi = 0.
(3.11)
α=1
Auf der Skala der Kontinuumsphysik wird der Zustand der Komponenten Aα charakterisiert durch Teilchenzahldichten nα , Geschwindigkeiten
υ α und eine gemeinsame Temperatur T . Diese Grundgrößen sollen Felder sein, d.h. sie sind gegeben durch Funktionen von Zeit und Raum:
und
nα : t ∈ [0, ∞) × x ∈ Ω → + , υ α : t ∈ [0, ∞) × x ∈ Ω →
T : t ∈ [0, ∞) × x ∈ Ω → + .
Aus den Grundgrößen bilden wir die Massen- und freie Ladungsdichten der
Komponenten,
(3.12)
ρα = mα nα und nFα = e0 zα nα .
Die entsprechenden Massenstromdichten und freie elektrischen Stromdichten sind
j α = mα nα υ α und j F α = e0 zα nα υ α .
(3.13)
Massendichte und freie Ladungsdichte der Mischung werden definiert durch
ρ=
N
X
ρα
F
und n =
α=1
N
X
nFα .
(3.14)
α=1
Die zugehörige Massenstromdichte und die freie Ladungsdichte der Mischung sind
N
N
X
X
F
j=
j α und j =
j Fα
(3.15)
α=1
α=1
Ferner definieren wir die baryzentrische Geschwindigkeit der Mischung, sowie die Diffusionsflüsse der Komponenten durch
ρυ =
N
X
α=1
ρα υ α
und J α = ρα (υ α − υ)
70
⇒
N
X
α=1
J α = 0.
(3.16)
Die Stromdichten (3.18) können wir also auch schreiben als
j = ρυ
F
F
und j = n υ +
N
X
zα e0
α=1
mα
J α.
(3.17)
Somit ist der nichtkonvektive Anteil der freien elektrischen Stromdichte
bereits durch die Diffusionsflüsse bestimmt.
Die oben beschriebene Polarisationsladung wird ebenfalls durch eine Ladungsdichte und eine Stromdichte beschrieben. Für diese Dichten führen
wir zunächst nur neue Symbole ein, nämlich nP für die Dichte der Polarisationsladung und j P für die Polarisationsstromdichte. Später werden wir
die hinter diesen Symbolen liegende Struktur genauer untersuchen.
Die gesamte Ladungsdichte ne und die gesamte Stromdichte sind dann
gegeben durch
(3.18)
ne = nF + nP und j e = j F + j P .
Basisvariable einer Mischung unter dem Einfluss eines elektromagnetischen Feldes. Wir betrachten als Basisvariable die N Teilchendichten (nα )α=1,2,...,N der Komponenten, die Geschwindigkeit v und die
temperature T der Mischung sowie das elektromagnetische Feld (E, B).
Alle anderen Größen aus dem letzten Abschnitt, die sich nicht auf die Basisvariablen zurückführen lassen werden in einem späteren Abschnit durch
Materialgleichungen gegeben.
Gibt es singuläre Flächen, entweder am Rand der Mischung oder im Inneren, kommen eventuell weitere Variable hinzu. Diese beschreiben die Fläche
und weitere Größen die hierauf leben. Auf diesen Aspekt kommen wir noch
einmal zurück.
Bilanzgleichungen für reguläre Punkte in EULER Koordinaten.
Die Gleichungen zur Bestimmung der Basisvariablen basieren auf den lokalen Bilanzgleichungen für Masse, Impuls und innere Energie.
Die Massenbilanzen für die Komponenten lauten in regulären Punkten
∂mα nα
+ div(mα nα υ α ) = rα .
∂t
(3.19)
Die Masse der Komponente Aα muss natürlich nicht erhalten sein, denn
sie kann sich aufgrund einer chemischen Reaktion verändern. Dies wird beschrieben durch die Massenproduktionsdichte rα , welche die Einheit kg/m3 /s
hat. Die Geschwindigkeit mit der dies passiert wird durch die Reaktionsraten angegeben. Für eine Reaktion i vom Typ (3.10) gibt es zwei Reakti71
onsraten, nämlich Rfi für die Vorwärtsreaktion und Rbi für die Rückwärtsreaktion. Offensichtlich gilt
R
rα =
N
X
i=1
woraus mit (3.11)1 folgt
mα γαi (Rfi − Rbi ),
N
X
(3.20)
(3.21)
rα = 0.
α=1
D. h. die Gesamtmasse der Mischung kann weder produziert noch vernichtet
werden. Sie ist eine Erhaltungsgröße. Wenn wir also in (3.19) mα nα υ α =
mα nα υ + J α einsetzen und über alle Komponenten summieren folgt mit
(3.14)1 und (3.16)2 die Massenbilanz der Mischung in der bekannten Form
∂ρ
+ div(ρυ) = 0.
(3.22)
∂t
Zur Herleitung der Impuls- und Energiebilanz verweisen wir auf Abschnitt
I.3.4. Allerdings ergänzen wir diese Bilanzen um die elektromagnetische
Kraftdichte, k, und die Energiezufuhr durch elektromagnetische Wärme,
π. Beide Größen werden wir im übernächsten Paragraphen identifizieren.
Reguläre Bilanzgleichungen für Materie in EULER Koordinaten.
Massenbilanz:
∂mα nα
+ div(mα nα υ + J α ) = rα .
∂t
(3.23)
∂ρυ
+ div(ρυ ⊗ υ − σ) = ρg + k .
∂t
(3.24)
Impulsbilanz:
Bilanz der inneren Energie:
ρ
∂
ρ
(ρu + υ 2 ) + div((ρu + υ 2 )υ − υ · σ) = ρg · υ + π .
∂t
2
2
(3.25)
Bilanzgleichungen für die Partialmassen der Mischung. Wir betrachen ein Volumen Ω, dessen Oberfläche ∂Ω sich mit der Geschwindigkeit w
bewegt. Für eine in Ω glatte Massendichte mα nα lautet die Bilanzgleichung
I
Z
Z
d
mα nα dx = − mα nα (v α − w) · nda + rα dx.
(3.26)
dt
Ω
Ω
∂Ω
72
Die anschauliche Bedeutung der hier durchgeführten Bilanzierung ist offensichtlich: (i) Durch eine Fläche mit Flächennormale n und Geschwindigkeit w, treten Teilchen der Komponente α mit der Relativgeschwindigkeit
(v α − w) · n. (ii) Das Volumenintgral auf der rechten Seite von (3.26) beschreibt die Produktion von Masse der Komponente α durch chemische
Reaktionen in Ω. Die Größe rα heißt Massenproduktionsdichte mit der
Einheit kg/s m3 .
Das Gebiet Ω wird jetzt durch eine singuläre Fläche I mit Eigenleben in
zwei Teile Ω+ und Ω− zerlegt. Hierbei wird auf ∂Ω eine Linie ∂I generiert.
Die entsprechende Bilanzgleichung für die Masse der Komponente α lautet
dann
Z
Z
Z
Z
d
(
mα nα dx + mα nI,α da) = rα dx + rI,α da +
dt
Ω
I
Ω
I
I
I
mα nα (v α − w) · nda − mα nI,α (v I,α − w) · eda. (3.27)
−
∂Ω
∂I
Hier bezeichnen: nI,α - Flächenmassendichte, rI,α - Flächenproduktionsdichte, v I,α - tangentiale Geschwindigkeit. Das Linienintegral repräsentiert
den Massenfluß tangential zur Fläche I und normal zum Rand ∂I. Entsprechend ist e ein Tangentialvektor welcher Normal auf ∂I steht. Für die
Details der geometrischen Verhältnisse konsultiere die Abbildungen I-3.5,
I-3.6 und I-2.6.
Herkunft der elektromagnetischen Gleichungen. In den nächsten
Paragraphen werden wir das System der Gleichungen für das elektromagnetische Feld (E, B) aufstellen. Dieses System basiert auf zwei Erhaltungssätzen:
• Erhaltung der elektrischen Ladung
• Erhaltung des magnetischen Flusses
Die Bilanzgleichung der elektrischen Ladung. Die Gesamtladung unserer Mischung ist eine Erhaltungsgröße. Sie kann im Gebiet Ω kann weder
erzeugt noch vernichtet werden. Für eine im ganzen Gebiet Ω glatte Ladungsdichte ne läßt sich der Erhaltungssatz der elektrischen Ladung deshalb schreiben:
I
Z
d
e
n (t, x)dx = − (j e − ne w) · nda.
(3.28)
dt
Ω
∂Ω
73
Falls das Gebiet Ω durch eine singuläre Fläche I in zwei Teile Ω+ und
Ω− zerlegt wird, und falls es auf I eine elektrische Flächenladungsdichte
neI : t ∈ [0, ∞) × x ∈ I → + nebst zugehöriger Flächenstromdichte jIe
gibt, dann lautet der Erhaltungssatz der elektrischen Ladung
Z
Z
d
e
( n (t, x)dx + neI (t, x)da) =
dt
Ω
I
I Ω
− (j e − ne w) · nda − (jIe − neI w) · eda.
(3.29)
∂Ω
∂I
Wir sind nun natürlich auch an den lokalen Versionen der Bilanzgleichung
für die elektrische Ladung interessiert. Zunächst betrachten wir aber nur
eine singuläre Fläche ohne Eigenleben. Dann folgt mittels der Transporttheoreme für Volumina und Flächen aus Teil I dieser Vorlesung, sowie der
dort ausführlich behandelten Argumente die
Lokale Darstellung der Ladungserhaltung:
∂ne
+ div(j e) = 0 in Ω,
∂t
(3.30)
Auf einer Fläche I ohne Eigenleben mit Normalgeschwindikkeit wν haben
wir
(3.31)
−wν [[ne ]] + [[j e]] · ν = 0.
Separate Bilanzgleichungen für freie Ladungen und die Polarisationsladung. Die freie elektrische Ladung und die Polarisationsladung erfüllen zwei individuelle Bilanzgleichungen. Die Bilanzgleichungen für die Massen der N Komponenten der Mischung implizieren nämlich bereits einen
Erhaltungssatz für die freie elektrische Ladung. Hierzu multiplizieren wir
die Massenbilanzen (3.25) mit zα e0 /mα und summieren über alle Komponenten. Es folgt
NR X
N
N
X
X
zα e 0
∂nF
F
J α) =
zα e0 γαi .
+ div(n υ +
∂t
mα
α=1
i=1 α=1
(3.32)
Hier verschwindet die rechte Seite, denn nach (3.11)2 ist die elektrische
Ladung in jeder Reaktion erhalten. Außerdem ist der Term unter der Divergenz nach (3.17) die freie elektrische Stromdichte j F . Ziehen wir diese
Gleichung von der Bilanzgleichung (3.30) ab, so entsteht ein Erhaltungssatz
für die Polarisationsladung. Zusammenfassend haben wir also in regulären
Punkten
74
Separate Erhaltungsgleichungen:
∂nF
+ div(j F ) = 0,
∂t
∂nP
+ div(j P ) = 0 in Ω.
∂t
(3.33)
Den Fall, dass es eine singuläre Fläche gibt, behandeln wir zur Zeit noch
nicht.
Die Erhaltung des magnetischen Flusses. Dieses Phänomen folgt aus
einem bemerkenswert einfachen Experiment.
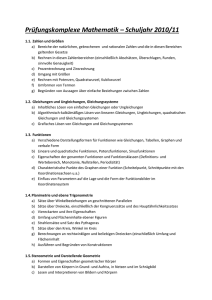
Abbildung 3.1: FARADAYs Experiment: Eine Drahtschleife bewegt sich in
einem magnetischen Feld.
Wird eine geschlossene Drahtschleife in einem gegebenen Magnetfeld B
mit der Geschwindigkeit W bewegt, so entsteht während der Bewegung
im Draht ein elektrisches Feld E, welches einen Strom elektrisch geladener
Ladungsträger (Elektronen) erzeugt. Das in diesem Experiment gefundene
Gesetz heißt
FARADAYsches Induktionsgesetz (Experimentelle Version):
Z
I
d
B · nda = −
(E + W × B) · τ ds.
(3.34)
dt
A(t)
∂A(t)
Bemerkung zur Historie: Nach 9 Jahren vergeblicher Suche fand FARADAY dieses Gesetz im Jahr 1831. Die experimentelle Realisierung des FARADAYschen Induktionsgesetzes ist allerdings kombiniert mit dem sogenannten OHMsche Materialgesetz: Damit in einem elektrischen Leiter ein
Strom I fließt, muss eine Spannung U anliegen. Nach OHM gilt U = RI, wo
R eine Materialkonstante für den verwendeten Leiter ist. In seiner Urform
wurde deshalb das FARADAYsche Induktionsgesetz als materialabhängiges
75
Gesetz geschrieben:
d
RI = −
dt
Z
B · nda.
(3.35)
A(t)
Erst nach einiger Zeit wurde klar, dass der elektrische Leiter aus Abbildung 3.1 zur Gültigkeit von (3.34) nicht notwendig ist. Aber wegen seiner
Bedeutung im Zusammenhang mit bewegten elektrischen Leitern hat das
Linienintegral in (3.34) einen eigenen Namen bekommen und heißt
Elektromotorische Kraft:
I
(E + W × B) · τ ds.
E=
(3.36)
∂A(t)
Übrigens: Die Geschwindigkeit W ist die Geschwindigkeit des Leiters bezogen auf den felderzeugenden Magnet. Auf die hiermit zusammenhängende
Problematik kommen wir noch ausführlich zurück.
Übung 3.5 Ein quadratischer Rahmen aus Kupfer mit der
Kantenlänge l = 1m und dem Kupferquerschnitt
A = 10−5 m2 wird mit der Geschwindigkeit W =
10m/s unter einem rechten Winkel in ein konstantes Magnetfeld B = 1Vs/m2 hineingeschoben. Für
Kupfer gilt das OHMsche Materialgesetz zwischen
Spannung und Strom U = RI und die Leistung ist
L = U I. R = A/(4lσ) heißt Widerstand, und σ ist
die spezifische Leitfähigkeit von Kupfer.
Berechne die entstehende Spannung sowie die notwendige Kraft, die benötigt wird, den Rahmen in
das Magnetfeld zu schieben.
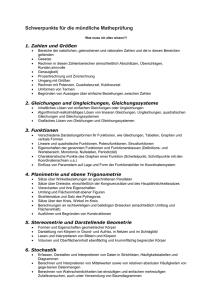
Als nächstes betrachten wir strömende Materie mit dem Geschwindigkeitsfeld υ(t, x). Wir übertragen das FARADAYsche Induktionsgesetz per Postulat auf eine materielle Fläche in dieser Strömung. Die Fläche A(t) mit
Normalenvektor n soll offen sein und hat den Rand ∂A(t). Diesem ist ein
Tangentenvektor τ zugeordnet.
76
Abbildung 3.2: Materielle Fläche zur Formulierung des Induktionsgesetzes
FARADAYsches Induktionsgesetz (Postulat):
I
Z
d
B · nda = −
(E + υ × B) · τ ds,
dt
A(t)
(3.37)
∂A(t)
woraus für eine geschlossene Fläche folgt
I
d
B · nda = 0.
dt
(3.38)
A(t)
Ein Magnetfeld läßt sich abschalten, und darum folgt aus (3.38)
I
B · nda = 0.
(3.39)
A(t)
Wir können das FARADAYsche Induktionsgesetz als Bilanzgleichung interpretieren. In diesem Zusammenhang sei daran erinnert, dass die bereits behandelten Bilanzgleichungen die Größen Masse, Impuls, Energie und elektrische Ladung an einem gegebenen Volumen bilanzieren. Dagegen wird im
FARADAYsche Induktionsgesetz eine Größe auf einer gegebenen Fläche
bilanziert. Wir sagen: Der Fluß
Z
B · nda
(3.40)
Φ=
A(t)
des magnetischen Feldes durch eine beliebige offene Fläche A(t) kann nicht
durch Quellen auf A(t) verändert werden, sondern nur durch einen Randfluß auf ∂A(t).
77
Transporttheoreme für Flächenintegrale. Zur Aufstellung der lokalen
Versionen der magnetischen Flußerhaltung benötigen wir ein Transporttheorem für Flächen. Im Teil 1 dieser Vorlesung haben wir bereits Transportheoreme für Volumina kennengelernt. Auch ein Transportheorem für
Flächen kennen wir aus Teil 1. Aber nur für Funktionen, die ausschließlich
auf der Fläche leben. Die hier vorliegende Situation ist anders, denn das
Magnetfeld ist im ganzen Raum 3 definiert, und nicht nur auf der Fläche
A(t) ⊂ 3 .
Wir betrachten ein Feld B : t ∈ [0, ∞) × x ∈ 3 → 3 und das Integral
(3.40) über eine Fläche A(t), die sich mit der Geschwindigkeit W durch
den 3 bewegt. Siehe hierzu die Abbildung 3.2. Es gilt dann das
Transporttheorem für Flächenintegrale:
Z
Z
I
∂B
d
B ·nda =
(
(B ×W )·τ ds. (3.41)
+W div(B))·nda+
dt
∂t
A(t)
A(t)
∂A(t)
Für materielle Flächenhaben wir W = υ. Hier können wir den Beweis mittels der Umrechnung von EULER- auf LAGRANGE- Koordinaten durchführen. Mit Hilfe des Deformationsgradienten F und der bekannten Formel
−1
dai = J Fji dAj wird zunächst das zeitabhängige aktuelle Flächenelement
auf ein Flächenelement in der Referenzkonfiguration zurückgeführt. Außerdem wird der Integrand mit Bezug auf diese Referenzkonfiguration angegeben. Nach dieser Aktion ziehen wir die Zeitableitung unter das Integral
und rechnen das Resultat (3.41) nach bekannten Regeln formal aus.
Für nichtmaterielle Flächen ist der Beweis schwieriger. Manche Größen,
wie beispielsweise die Flächengeschwingigkeit W , sind dann nämlich nur
auf der Fläche definiert und müssen geeignet in den einbettenden Raum
fortgesetzt werden. Die hiermit zusammenhängende Problematik ignorieren
wir in dieser Vorlesung.
Übung 3.6 Beweise das Transportheorem (3.37) für materielle
Flächen und orientiere dich an den entsprechenden
Aufgaben aus Teil I dieser Vorlesung.
Etwas komplizierter wird es, falls A(t) durch eine singuläre Fläche I(t)
in zwei Teile gemäß A = A+ ∪ A− aufgeteilt wird. Die singuläre Fläche
I(t) hat die Flächennormale ν und bewegt sich mit der Geschwindigkeit
w durch den Raum. Hierbei wird auf A(t) eine singuläre Linie L(t) mit
78
Tangente t und Geschwindigkeit w generiert. Wie üblich vereinbaren wir,
dass A+ auf der Seite liegt, wo ν hinzeigt.
Abbildung 3.3: Eine singuläre Fläche I teilt eine materielle Fläche A durch
Generierung einer singulären Linie L in zwei Teile.
Für diese Situation gibt es ein
Transportheorem für Flächen bei Vorhandensein einer singulären Linie:
d
dt
Z
A+ (t)∪A− (t)
B · nda =
∂B
+ W div(B)) · nda +
(3.42)
∂t
A+ ∪A−
I
I
(B × W ) · τ ds − ([[B]] × w) · tds
Z
(
∂A+ \L∪∂A− \L
L
Lokale Version der magnetischen Flußerhaltung. Mit Hilfe der beiden Transporttheoreme (3.41) und (3.42) ist es eine leichte Aufgabe, die
Aussagen (3.37) und (3.39) des globalen FARADAYschen Induktionsgesetzes, in die entsprechenden lokalen Formen zu bringen. Wir betrachten
zunächst den Fall ohne singuläre Linie, und eliminieren die Zeitableitung
in (3.37) über das Transportheorem (3.41). Auf das Linienintegral wenden
wir den Satz von STOKES an, siehe (I-2.11), so dass wir mit einem Flächenintegral über eine beliebige Fläche enden, welches Null ist. Es folgt,
dass dann auch der Integrand null sein muss. Die Ausage (3.39) formen wir
mit dem Satz von GAUSS um, siehe (I-2.6), und schließen analog. Es folgt
das
79
Lokale FARADAYsche Induktionsgesetz in regulären Punkten:
∂B
+ rot(E) = 0 und div(B) = 0.
∂t
(3.43)
Als nächstes geben wir die entsprechenden Gesetze in singulären Punkten
an. Die singuläre Version von (3.43)1 beschreibt den Übergang an einer
singulären Linie, die eine Fläche in zwei Teile teilt, wie in Abbildung 3.3
illustriert. Dagegen ist die globale Form des Gesetzes (3.43)2 über den Satz
von GAUSS durch Volumenintegral darstellbar. Folglich beschreibt dessen
singuläre Version den Übergang an einer Fläche, welche ein Volumen in
zwei Teile teilt.
Es gilt das
Lokale FARADAYsche Induktionsgesetz in singulären Punkten:
sowie
−wν [[B]] + ν × [[E]] = 0 für x ∈ L(t).
(3.44)
[[B]] · ν = 0 für x ∈ I(t).
(3.45)
Der Beweis bringt keine neuen Einsichten, und deshalb wird er hier unterdrückt. Der Leser sollte trotzdem versuchen, die entsprechenden Schritte
in Analogie zu den bereits mehrfach in dieser Vorlesungen aufgeführten
Argumenten aufzuschreiben.
Zwischenzusammenfassung. Wir haben bisher zwei Erhaltungssätze kennengelernt: Den Satz von der Erhaltung der elektrischen Ladung und den
aus zwei Teilen bestehenden Satz von der Erhaltung des magnetischen Flusses. Beispielsweise haben wir also in regulären Punkten
∂ne
+ div(j e) = 0 und
∂t
∂B
+ rot(E) = 0,
∂t
div(B) = 0.
(3.46)
Weitere Erhaltungsgleichungen, die unabhängig sind von (3.46)-(??) und
deren singulären Versionen, kennt die Elektrodynamik nicht.
Wir haben somit unser Ziel, die Berechnung des elektromagnetischen Feldes
(E, B) aus vorgegebenen Ladungs- und Stromverteilungen, noch nicht erreicht. Denn offensichtlich benötigen wir hierzu noch Materialgleichungen,
welche die in (3.46) auftretenden Felder verknüpfen. Deren Formulierung
basiert auf einem bedeutsamen Zwischenschritt, der jetzt folgt.
Ladungspotential und Strompotential. Aus der Erhaltungsgleichung
(3.46) für die elektrische Ladung können wir eine weitere Flächenbilanz
80
herleiten. Die Gleichung (3.46) kann nämlich durch Einführung von zwei
neuen Größen identisch erfüllt werden.
Darstellung von Ladung und Strom durch Potentiale in regulären Punkten:
ne = div(D) und j e = −
∂D
+ rot(H).
∂t
(3.47)
Die Funktion D : t ∈ [0, ∞) × x ∈ 3 → 3 heißt Ladungspotential, und
H : t ∈ [0, ∞) × x ∈ 3 → 3 ist das Strompotential.
Die Behauptung folgt unmittelbar durch Einsetzen von (3.51) in die lokale
Ladungserhaltung (3.46).
Wir erkennen durch Vergleich mit der Argumentation zum FARADAYschen Induktionsgesetz, dass die Darstellungen (3.51) die lokalen Versionen
von globalen Bilanzgleichungen in regulären Punkten sind.
Aus diesen globalen Bilanzgleichungen, die wir hier aber nicht weiter besprechen, folgt die
Darstellung von Ladung und Strom durch Potentiale in singulären Punkten:
sowie
+wν [[D]] + ν × [[D]] = j eI
[[D]] · ν = neI
für x ∈ L(t).
für x ∈ I(t).
(3.48)
(3.49)
Wir haben diese Zusammenhänge hier nur der Vollständigkeit wegen angegeben. Benutzen werden wir sie in dieser Vorlesung nicht, und darum
verzichten auf den Beweis.
Einige Bemerkungen zum Schluß dieses Abschnittes. Die Gleichungen für
die Felder D und H wurden historisch mittels vollkommen anderer Argumentationsketten gefunden als soeben beschrieben. Deshalb heißen D und
H historisch auch nicht Ladungs- und Strompotential, sondern stattdessen
• D - elektrische Induktionsdichte
• H - magnetische Feldstärke
Aus den Gleichungen (3.48) und (3.49) lesen wir als Einheiten für D und
H ab:
A
C
[D] = 2 und [H] = .
(3.50)
m
m
81
Durch Vergleich mit den entsprechenden Einheiten der magnetischen Induktionsdichte, [B]=Vs/m2 und für die elektrische Feldstärke, [E]=V/m,
wird natürlich die historische Namensgebung klar.
Ladungspotential und Strompotential für Polarisationsladungen.
Wir erinnern daran, dass nach (3.33) die Bilanzgleichung für die elektrische
Ladung in zwei Teilbilanzen für die freie Ladung und die Polarisationsladung zerfällt. Entsprechend gibt es also auch für den Erhaltungssatz der
Polarisationsladung eine formale Lösung. Die Gleichung (3.33)2 wird nämlich analog zu (3.46) erfüllt mittels zwei neuer Vektoren: P - Polarisation
und m - Magnetisierung. Dies sind die physikalisch motivierten Bezeichnungen. Im hiesigen Kontext aber können wir diese Größen auch Ladungsund Strompotential der Polarisationsladung nennen.
Darstellung von Ladung und Strom der Polarisationsladung
durch Potentiale in regulären Punkten:
nP = −div(P ) und j P =
∂P
+ rot(m).
∂t
(3.51)
Die Funktion P : t ∈ [0, ∞) × x ∈ 3 → 3 heißt Ladungspotential
der Polarisationsladung, und m : t ∈ [0, ∞) × x ∈ 3 → 3 ist das
Strompotential der Polarisationsladung.
Den Fall der singulären Fläche behandeln wir zur Zeit noch nicht.
MAXWELLsche Gleichungen und MAXWELL-LORENTZ Ätherrelationen. Wir beschränken die nun zu führende Diskussion auf die lokalen Gleichungen in regulären Punkten.
Das folgende System von vier Gleichungen heißt
MAXWELLsche Gleichungen:
∂B
+ rot(E) = 0
∂t
∂D
+ rot(H) = j e
−
∂t
div(B) = 0
div(D) = ne
(3.52)
(3.53)
Es ist offensichtlich: Dieses System reicht nicht aus zur Berechnung der elektromagnetischen Felder aus vorgegenen Ladungs- und Stromverteilungen.
Zu diesem Zweck müssen die MAXWELLschen Gleichungen durch weitere
Gleichungen ergänzt werden, die eine Verbindung herstellen zwischen den
Paaren (E, B) und (D, H).
Interessanter Weise sind die folgenden durch Messungen gefundenen Glei82
chungen sehr einfach und universeller Natur, d.h. sie sind materialunabhängig.
MAXWELL-LORENTZ Ätherrelationen:
D = ε0 E
H=
1
B
µ0
mit ε0 =
1
c2 µ
(3.54)
0
Es treten drei Konstanten auf. Die Lichtgeschwindigkeit c = 299.792.458
m/s, die magnetische Permeabiltät µ0 = 4π10−7 Vs/Am und die dielektrische Konstante ε0 , welche aus den beiden anderen Konstanten berechnet
werden kann.
Der Zahlenwert der Lichtgeschwindigkeit wurde früher unabhängig von der
MAXWELLschen Theorie gemessen. Er ist seit einiger Zeit per Gesetz auf
den angegebenen Wert festgesetzt, wodurch die Längeneinheit Meter als
Grundeinheit abgeschafft ist und durch eine genauere Zeitmessung ersetzt
wird. Der Zahlenwert der Permeabilität entspringt der Definition der Einheit AMPERE (A) für die Stromstärke.
Bevor wir uns mit den Bedingungen für die Gültigkeit der MAXWELLLORENTZ Ätherrelationen beschäftigen, werden wir die Kopplung der
MAXWELL Gleichungen mit den Materiegleichungen studieren.
Energie und Impuls des elektromagnetischen Feldes. Aus den Gleichungen der Elektrodynamik lassen sich zwei weitere Bilanzgleichungen
herleiten, welche die Kopplung an die Thermodynamik herstellen.
Elektromagnetische
Spannungstensor
mei = (D × B)i
Impulsdichte
und
elektromagnetischer
1
σije = − (D · E + H · B)δij + Di Ej + Hi Bj (3.55)
2
Bilanzgleichung des elektromagnetischen Impulses
∂me
+ div(−σ e) = −(ne E + j e × B)
∂t
(3.56)
Diese Bilanzgleichung ist eine Folge der MAXWELLschen Gleichungen.
Für den Beweis gehen wir in ein Beobachtersystem, wo die MAXWELLLORENTZ Ätherrelationen die einfache Form (3.79) haben. Nach Einsetzen dieser Relationen in die Gleichungen (3.53) für das Ladungs-Strom
Potential multiplizieren wir (3.53)1 mit E. Außerdem bilden wir das Kreuzprodukt von (3.53)2 mit B. Die Addition beider Gleichungen und anchlie83
ßende Umformungen, in welche der Erhaltungssatz des magnetischen Flußes (3.52) einfließt, liefern dann (3.56).
Elektromagnetische
Energiefluß
Energiedichte
und
elektromagnetischer
1
ee = (D · E + H · B) qie = (E × H)i
2
(3.57)
Bilanzgleichung der elektromagnetischen Energie
∂ee
+ div(q e) = −j e · E
∂t
(3.58)
Die Bilanzgleichung für die elektromagnetische Energie ist ebenfalls eine
Folge der MAXWELLschen Gleichungen. Zum Beweis bilden wir das Skalarprodukt von (3.52)1 mit B sowie von (3.53)1 mit E. Die Behauptung
(3.58) folgt nach Addition der resultierenden Gleichungen und einigen einfachen Umformungen.
Die Literatur kennt für den elektromagnetische Spannungstensor und den
Energieflußvektor weitere Bezeichnungen. Diese Größen werden auch
MAXWELL-Spannung und POINTING-Vektor genannt.
Die ohne weitere Annahmen aus den beiden elektromagnetischen Erhaltungssätzen resultierenden Bilanzgleichungen für den elektromagnetischen
Impuls und die elektromagnetische Energie haben auf ihren rechten Seiten zwei Quellterme. In der Impulsbilanz steht hier die bereits eingeführte
LORENTZ Kraftdichte ne (E + υ × B) mit negativem Vorzeichen, und
der Quellterm der elektromagnetischen Energie ist bis aufs Vorzeichen die
sogenannnte JOULEsche Wärme j e · E.
Durch diese beiden Quellterme koppeln die elektromagnetischen Bilanzgleichungen für Impuls und ENERGIE an die entsprechenden Bilanzgleichungen für Materie (3.6) und (3.137). Die Addition dieser Bilanzgleichungen
mit den entsprechenden elektromagnetischen Bilanzgleichungen liefert die
Bilanzgleichungen für die Dichten des Gesamtimpulses
ρυ + D × B
(3.59)
ρ
1
ρe + υ 2 + (D · E + H · B).
2
2
(3.60)
und der Gesamtenergie
Explizit folgt ohne Scwerkraft:
84
Impuls- und Energiebilanz für Materie und elektromagnetisches
Feld in EULER Koordinaten.
Impulsbilanz:
∂ρυ + me
+ div(ρυ ⊗ υ − σ − σ e ) = k − (ne E + j e × B) .
∂t
(3.61)
Bilanz der inneren Energie:
ρ
ρ
∂
(ρu+ υ 2 +ee )+div((ρu+ υ 2 )υ +q +q e −υ ·σ) = π −j e ·E . (3.62)
∂t
2
2
Wir postulieren nun, dass der Gesamtimpuls und die Gesamtenergie erhalten sind. Dann müssen natürlich die rechten Seiten von (3.61) und (3.62)
verschwinden und wir können die LORENTZ Kraftdichte und die JOULE
Wärme identifizieren:
k = ne E + j e × B,
(3.63)
π = j e · E.
Die Abhängigkeit der MAXWELL-LORENTZ Ätherrelationen
vom Beobachter. Diese Untersuchung führt uns auf ein äußerst subtiles Gebiet. Außerdem hängt diese Frage eng mit einer anderen Frage zusammen: Für welchen Beobachter gelten eigentlich die MAXWELLschen
Gleichungen?
In diesem Zusammenhang läßt sich eine merkwürkwürdige Beobachtung
machen. Wenn wir die MAXWELL-LORENTZ Ätherrelationen in die MAXWELLschen Gleichungen einsetzen, entstehen hyperbolische Gleichungen
2. Ordnung, welche die Ausbreitung von elektromagnetischen Wellen mit
der soeben eingeführten Geschwindigkeit c beschreiben. Für den ladungsund stromfreien Raum, d.h. ne = 0, j e = 0 ist dies einfach zu sehen. Wir
differenzieren (3.52)1 nach der Zeit. Dann ersetzen wir unter der Rotation
die Zeitableitung des elektrischen Feldes mittels (3.53)1 wo wir aber vorher
die MAXWELL-LORENTZ Ätherrelationen eingesetzt haben. Es ensteht
eine Wellengleichung für B. Durch entsprechende Behandlung von (3.53)1
entsteht eine Wellengleichung für E. Wir erhalten also
∂ 2B
= c2 ∆B
∂t2
und
∂ 2E
= c2 ∆E
∂t2
mit c2 =
1
.
ǫ0 µ 0
(3.64)
Ein Studium dieser Gleichungen und insbesondere die Vermessung von elektromagnetischen Wellen liefern das zunächst paradox anmutetende Resultat: Elektromagnetische Wellen breiten sich unabhängig vom Bewegungszustand der Quelle und unabhängig vom Bewegungszustand des messenden
85
Beobachters mit der Geschwindigkeit c aus. Dies ist in der Tat merkwürdig, denn die Gleichungen (3.64) sind zunächst in vollkommener Analogie
zu der Wellengleichung für die Ausbreitung von Schallwellen in Luft. Diese
Wellengleichung folgt aus einer Kombination von Massen- und Impulsbilanz und lautet für Dichtestörungen ρ
∂2ρ
5 kT
= c2 ∆ρ mit c2 =
,
2
∂t
3m
(3.65)
wo T die Temperatur der ungestörten Luft ist.
Im Folgenden werden wir mittels einer einfachen Methode die Unterschiede
zwischen Schallwellen und elektromagnetischen Wellen aufzeigen.
Elastische versus elektromagnetische Wellen. In einer Schallwelle
werden die Moleküle der Luft in Schwingungen
versetzt, und diese Störung
p
breitet sich mit der Geschwindigkeit c = 5/3kT /m aus. Diese Geschwindigkeit gilt für einen Beobachter, welcher relativ zum Medium Luft ruht.
Ein entsprechendes Medium für eine elektromagnetische Welle wurde Äther
genannt. Aber trotz intensiver Suche wurde der Äther nicht gefunden.
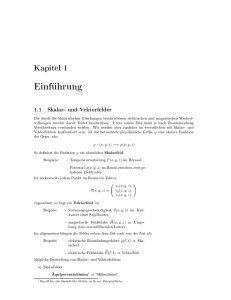
Wir wollen zunächst die Schallwelle genauer untersuchen. Hierzu betrachten wir einen endlichen Wellenzug, der sich nach rechts bewegt. Der Wellenszug besteht aus N Perioden mit Frequenz ν, Wellenlänge λ und Phasengeschwindigkeit c. Diese Größen werden in in einem System S mit Koordinaten (t, x) gemessen, in welchem das ungestörte Medium M ruht. Es
gilt λν = c. Die folgende Skizze zeigt einen Wellenzug mit N = 5 Perioden,
dessen Front zur Zeit t0 den Ort x0 erreicht und dessen Ende zur Zeit t1
den Ort x1 passiert. Aus der Skizze lesen wir ab c(t1 − t0 ) = x1 − x0 + N λ.
Abbildung 3.4: Ein endlicher Wellenzug bewegt sich nach rechts.
Nun betrachten wir den gleichen Vorgang in einem System S∗ , welches
sich mit der konstanten Geschwindigkeit W gegen S bewegt und durch die
Koordinaten
x∗ = x − W t
(3.66)
t∗ = t,
86
beschrieben wird. Der Übergang von S nach S ∗ heißt GALILEI Transformation. Es ist klar, dass der Wellenzug in beiden Systemen N = 5 Perioden
Abbildung 3.5: GALILEI Transformation.
hat. Wir nennen die Größe N deshalb eine Invariante. Es gilt somit
N=
1
1
(c(t1 − t0 ) − (x1 − x0 )) = ∗ (c∗ (t∗1 − t∗0 ) − (x∗1 − x∗0 )),
λ
λ
(3.67)
bzw.nach Einsetzen von (3.66) folgt
(
1
1
c∗
c W
)(x
−
−
x
)
=
(
− + ∗ )(t1 − t0 ).
1
0
∗
∗
λ
λ
λ
λ λ
(3.68)
Da (t0 , x0 ) als auch (t1 , x1 ) beliebig sind, folgen die Zusammenhänge
λ∗ = λ,
c∗ = c − W,
ν∗ =
c∗
W
= ν(1 − ).
∗
λ
c
(3.69)
Dies sind die Formeln des klassischen DOPPLER Effektes: Ein gegen das
Medium der Welle bewegter Beobachter beobachtet die gleiche Wellenlänge
wie ein im Medium ruhender Beobachter. Außerdem konstatiert der mit der
Welle gleichsinnig bewegte Beobacher eine kleinere Phasengeschwindigkeit
und eine kleinere Frequenz. Bewegt sich der Beobachter gegen die Ausbreitungsrichtung der Welle, d.h. W < 0, dann folgen für ihn eine höhere
Phasengeschwindigkeit und eine höhere Frequenz.
Als nächstes verändern wir das Szenarium. Wir betrachet jetzt eine Schallquelle Q, welche in ihrem Ruhesystem die Frequenz νQ generiert und sich
mit der Geschwindigkeit vQ gegen das Medium bewegt. Auch dieser Fall
ist natürlich durch die DOPPLER Formeln (3.69) abgedeckt. Mit ν ∗ = νQ
und W = vQ folgt νQ = ν(1 − vQ /c). Ein gegen das Medium ruhender Beobachter sieht also eine größere Frequenz, als von der Quelle abgestrahlt:
ν=
νQ
v .
1 − cQ
(3.70)
Es ist also nicht egal, ob sich die Quelle oder der Beobachter gegen das
Medium bewegen.
87
Hendrik Antoon
Lorentz besaß bereits vor Einstein
die formale Struktur der speziellen
Relativitätstheorie. Fast alle seine
Resultate
aber
interpretierte er
falsch .
Schließlich betrachten wir die Situation, dass, wie vorher, die Quelle die
Frequenz νQ generiert und sich mit vQ gegen das Medium bewegt. Darüberhinaus soll sich nun der Beobachter ebenfalls gegen das Medium bewegen, nämlich mit der Geschwindikeit W . Hierzu ersetzen wir in der letzten
Formel νQ durch νQ (1 − W/c) und erhalten
ν = νQ
1 − Wc
v .
1 − cQ
(3.71)
Hier sehen wir noch einmal deutlich, dass nicht die Relativgeschwindigkeit
zwischen Quelle und Beobachter die bestimmende Größe ist, sondern die
Relativgeschwindigkeiten von Quelle und Beobachter gegen das Medium.
Messungen mit elektromagnetischen Wellen zeigen etwas ganz Anderes:
• Unabhängig vom Bewegungszustand der Quelle und des Beobachters
gilt c∗ = c,
• die Frequenz und(!) die Wellenlänge sind ausschließlich durch die Relativgeschwindigkeit zwischen Quelle und Beobachter bestimmt. Eine
Bewegung gegen das Medium, hier Äther genannt, ist nicht detektierbar.
Würden wir annehmen, dass die MAXWELL-LORENTZ Ätherrelationen
auch im bewegten System in der Form (3.79) gelten, dann könnten wir
natürlich die erste Aussage sofort erklären. Die durchgeführte GALILEI
Transformation müsste deshalb liefern
D ∗ = ε0 E ∗
H∗ =
1 ∗
B
µ0
mit ε0 =
1
c2 µ
.
(3.72)
0
Um die Gültigkeit von (3.72) beurteilen zu können, müssen wir also zunächst lernen, wie sich das elektromagnetische Feld bei einem Wechsel des
Beobachters verhält.
Die vierdimensionale Formulierung der MAXWELLschen Gleichungen. Hierzu ist eine Vorbereitung notwendig, die zunächst sehr formal
aussieht, aber zu Aussagen von großer Tragweite führt.
Wir fassen die Zeitkoordinate t und den Ortsvektor x = (x1 , x2 , x3 ) zu
einem vierdimensionalen Gebilde zusammen, welches wir die Koordinaten
eines Raumzeitpunktes nennen. Die Menge aller Raumzeitpunkte ist die
Raumzeit:
(3.73)
(xA )A=0,1,2,3 = (t, x1 , x2 , x3 ).
88
Ein weiteres vierdimensionales Gebilde erzeugen wir durch Zusammenfassung von elektrischer Ladungsdichte ne und Stromdichte j e = (j1e , j2e , j3e )
gemäß
(3.74)
(j A )A=0,1,2,3 = (ne , j1e , j2e , j3e ).
Wir nennen die Kombination j A die Komponenten des Ladungs-Strom Vektors. Durch die Einführung dieses Vektors im 4 können wir den Erhaltungssatz der elektrischen Ladung (3.46) sehr kompakt als Aussage über
eine vierdimensionale Divergenz schreiben:
∂j A
= 0.
∂xA
(3.75)
Eine ähnliches Programm läßt sich auch für die MAXWELLschen Gleichungen (3.52) und (3.53) durchführen. Zu diesem Zweck kombinieren wir
die Paare (E, B) und (D, H) zu vierdimensionalen Matrizen
¶
¶
µ
µ
0 −Ei
0
Di
AB
(η )A,B=0,1,2,3 =
.
(ϕAB )A,B=0,1,2,3 =
Ei ǫijk Bk
−Di ǫijk Hk
(3.76)
Vollständig ausgeschrieben haben wir
0 −E1 −E2 −E3
0
D1
D2
D3
E1
0
B3 −B2
0
H3 −H2
η AB = −D1
.
ϕAB =
E2 −B3
−D2 −H3
0
B1
0
H1
E3 B2 −B1
0
−D3 H2 −H1
0
(3.77)
Die hier neu eingeführten antisymmetrischen Matrizen heißen
• ϕ - FARADAY Tensor
• η - Ladungs-Strom Potential
Wie wir demnächst sehen werden, steckt hinter der unterschiedlichen Stellung der Indizes in den Definitonsgleichungen für ϕ und η ein tieferer Sinn.
Zunächst aber führen wir in Analogie zu (I-1.63) das vollständig antisymmetrische Symbol im 4 ein:
falls ABCD eine gerade Permutation von 0123,
1
ABCD
−1
falls ABCD eine ungerade Permutation von 0123,
ε
=
0
falls zwei Indizes gleich sind.
(3.78)
89
Mit diesen Hilfsmitteln können wir (3.52) und (3.53) umschreiben in die
Vierdimensionale Form der MAXWELLschen Gleichungen:
εABCD
∂ϕCD
= 0 und
∂xB
∂η AB
= j A.
∂xB
(3.79)
In Worten: Im hiesigen Kontext macht das FARADAYsche Induktiongesetz eine Aussage über eine vierdimensionale Rotation, wogegen sich die
Gleichungen (3.53) für das Ladungs-Strom Potential durch eine vierdimensionale Divergenz darstellen läßt.
Wegen der Antsymmetrie von η, d.h. η AB = −η BA folgt aus (3.79)2 durch
Divergenzbildung natürlich die Erhaltung der elektrischen Ladung (3.84).
Aber auch die formale Lösung (3.51) des Erhaltungssatzes der Polarisationsladung läßt sich in die vierdimensionale Form bringen. Hierzu definieren
wir den Ladungs-Stromvektor der Polarisationsladung und das zugehörige
Ladungs-Strompotential
µ
¶
0
−Pi
P,A
P
P
P
P
AB
.
(j )A=0,1,2,3 = (n , j1 , j2 , j3 ), (M )A,B=0,1,2,3 =
Pi ǫijk mk
(3.80)
Hiermit folgt aus der Darstellung (3.51) die
Vierdimensionale Form der Erhaltungsgleichung der Polarisationsladung und ihre formale Lösung:
∂j P,A
= 0,
∂xA
∂MAB
= j P,A .
B
∂x
(3.81)
Transformationsverhalten der elektromagnetischen Felder. Wir stellen einen Punkt der Raumzeit durch zwei verschiedene Komponentensätze
dar, die durch eine eineindeutige sonst aber beliebige Transformation verküpft sein sollen:
A
xA = x̂ (t, x1 , x2 , x3 ) ⇔ xA = x̂A (t, x1 , x2 , x3 ).
(3.82)
Wie sich die dreidimensionalen Versionen von Divergenz und Rotation
transformieren, haben wir ausführlich in Teil I dieser Vorlesung im Abschnitt I-1.4 analysiert. Es ist offensichtlich, dass eine Erhöhung der Dimensionszahl an den dort gefundenen Eigenschaften nichts ändert.
Jetzt setzen wir das Transformationsverhalten der elektrodynamischen Felder unter der Transformatiom (3.82) so fest, dass die MAXWELLschen
90
Gleichungen (3.79) für jedes System von Koordinaten gleich aussehen.
Mit anderen Worten, wir verlangen, dass für jedes Koordinatensystem der
Raumzeit gilt
∂ η̄ AB
∂ ϕ̄CD
=
0
und
= j̄ A .
(3.83)
ε̄ABCD
∂ x̄B
∂ x̄B
Diese Forderung erreichen wir durch das folgende
Transformationsverhalten der elektromagnetischen Felder
j̄ A = |
∂x ∂ x̄A B
|
j
∂ x̄ ∂xB
ϕ̄AB =
∂xA ∂xB
ϕCD
∂ x̄C ∂ x̄D
η̄ AB = |
∂x ∂ x̄A ∂ x̄B CD
|
η
∂ x̄ ∂xC ∂xD
(3.84)
Der Beweis dieser Behauptung ist einfach aber lang. Die behaupteten Transformationsformeln werden in die MAXWELLschen Gleichungen eingesetzt,
die Ableitungen werden mit der Kettenregel umgerechnet und nach Einführung des Transformationsgesetzes für das ε -Symbol, welches analog zu
(I-1.67) gebildet wird, folgt die behauptete Invarianz der MAXWELLschen
Gleichungen unter der Transformation (3.82).
Entsprechend lautet das
Transformationsverhalten der Polarisationsladung und ihrer Potentiale:
j̄
P,A
∂x ∂ x̄A P,B
= | | Bj
∂ x̄ ∂x
AB
M̄
∂x ∂ x̄A ∂ x̄B CD
= | | C DM .
∂ x̄ ∂x ∂x
(3.85)
Aufgrund ihrer essentiellen Bedeutung fassen wir die wesentlichen Annahmen noch einmal zusammen.
• Die MAXWELLschen Gleichungen sind invariant bezüglich beliebiger
Raumzeit Transformationen, wenn sie in den Feldern (E, B) und
(D, H) angegeben werden.
• Die Komponenten des Ladung-Strom-Vektors sind als kontravariante
Vektordichte definiert.
• Die Matrix (3.77)1 soll ein kovarianter absoluter antisymmetrischer
Tensor zweiter Stufe sein.
• Die Matrizen (3.77)2 und (3.80)2 sind als kontravariante antisymmetrische Tensordichten zweiter Stufe definiert.
91
Beachte: Die Einführung von Vektor- bzw. antisymmetrischen Tensordichten impliziert, dass partielle Ableitungen nicht zu kovarianten Ableitungen werden, sondern partielle Ableitungen bleiben. Dies garantiert, dass
Erhaltungsätze für jeden Beobachter Erhaltungssätze bleiben. Beim FARADAYschen Induktionsgesetz (3.79)1 wird dies auch mit einem absoluten
antisymmetrischen Tensor erreicht. Der Beweis dieser wichtigen Aussagen
sind Gegenstand der Übungen 3.7 und 3. 8. Es empfielt sich aber, diese
Übungen erst nach Einführung der Raumzeit-Metrik zu erledigen.
Übung 3.7 Beweise die soeben gemachten Behauptungen.
Übung 3.8 a.) Erläutere an einem Beispiel welche mathematische Struktur ein Erhaltungssatz haben muss.
b.) Zeige ebenfalls an einem Beispiel, dass eine
kovariante Ableitung, die durch eine Zeit-RaumTransfomation generiert wird, nicht in einem Erhaltungssatz auftreten darf.
c.) Warum treten bei der Bildung einer Rotation
nur partielle Ableitungen auf?
Übung 3.9 Wende die Transformationsformeln der elektromagnetischen Felder auf die spezielle GALILEI Transformation an, die wir zur Diskussion des DOPPLER Effektes verwendet haben:
t̄ = t x̄i = xi − Wi t,
(3.86)
allerdings hier mit der konstanten Geschwindigkeit
W = (W1 , W2 , W3 ) in 3 Raumrichtungen.
a.) Berechne das Transformationsverhalten von E,
B, D und H. Zeige, dass gilt
B̄i = Bi (3.87)
Ēi = Ei + (W × B)i ,
H̄i = Hi − (W × D)i (3.88)
D̄i = Di ,
b.) Erläutere das Ergebnis ausführlich im Kontext
unserer Diskussion des DOPPLER Effektes.
92
Vierdimensionale Form der MAXWELL-LORENTZ Ätherrelationen. Als nächstes versuchen wir die Relationen D = 1/(µ0 c2 )E und
H = 1/µ0 B in eine vierdimensionale Form zu bringen.
Nach einigem Probieren stellen wir fest, dass dies keine Beziehung zwischen
η AB und ϕAB sein kann. Unsere Erfahrungen aus Teil I dieser Vorlesung
legen aber die Vermutung nah, dass wir für eine vierdimensionale Formulierung der MAXWELL-LORENTZ Ätherrelationen die kontravarianten
Komponenten von ϕAB benötigen. Hätten wir eine vierdimensionale Metrik gAB zur Verfügung, so könnten wir dies sofort überprüfen, denn aus
der Inversen g AB folgt natürlich
ϕAB = g AC g BD ϕCD .
(3.89)
Wie aber sieht die Metrik gAB aus? Auch dieses Problem können wir durch
Probieren lösen, und zwar so: Wir versuchen eine Metrik derart zu bestimmen, dass die MAXWELL-LORENTZ Ätherrelationen (3.79) herauskommen. Hierzu setzen wir
η AB = a g AC g BD ϕCD ,
(3.90)
wo a und die Metrik geeignet zu wählen sind. Zunächst stellen wir fest,
dass die Metrik diagonal sein muß, mit Diagonaltermen g 00 = 1/c2 , g 11 =
g 22 = g 33 = −1, und dann müssen wir a = 1/µ0 wählen, damit die Formeln
(3.79) reproduziert werden.
Allerdings gibt es noch einen Schönheitsfehler. Die Formel (3.90) verknüpft
nämlich immer noch Tensoren verschiedener Art. Schließlich ist η eine
Tensordichte, während ϕ ein absoluter Tensor ist. Wir definieren g =
− det(gAB ) und beheben das Problem, indem wir einfach an Stelle von
√
a = 1/µ0 die Wahl a = g/(µ0 c) treffen, was in dem Beobachersystem wo
(3.79) gilt denselben Zahlenwert liefert.
Vierdimensionale Form der MAXWELL-LORENTZ Ätherrelationen.
In einem Beobachtersystem mit den Raumzeitkoordinaten xA , wo gilt
2
c
0
0
0
√
0 −1 0
g AB
0
AB
(3.91)
folgt η =
ϕ .
gAB =
0 0 −1 0
µ0 c
0 0
0 −1
Wir haben somit folgendes erreicht. Zunächst ist die Gleichung (3.91)2 zumindest in einem Beobachtersystem richtig, nämlich dort wo D = 1/(µ0 c2 )E
93
und H = 1/µ0 B gelten. Da aber die Gleichung (3.91)2 eine Tensorgleichung ist, muss sie in jedem Beobachtersystem gelten.
Diese Strategie zur Konstruktion von physikalischen Gleichungen ist sehr
mächtig und heißt Prinzip der allgemeinen Kovarianz.
Abhängigkeit der gemessenen MAXWELL-LORENTZ Ätherrelationen vom Beoabachter. Auf den Grundlagen der letzten Paragraphen wollen wir jetzt die anfänglich gestellte Frage beantworten: Welcher
Beobachter stellt die Richtigkeit der Gleichungen
D = ε0 E
H=
1
B
µ0
mit ε0 =
1
c2 µ
,
(3.92)
0
d.h. der MAXWELL-LORENTZ Ätherelationen, fest?
Die historische Antwort klingt zunächst einfach. Die MAXWELL-LORENTZ
Ätherrelationen wurden auf der Erde vermessen. Was zunächst banal klingt,
ist doch im Hinblick auf die Erfahrungen aus Übung 3.9 überaschend. Beipielsweise bewegt sich die Erde mit etwa 40 km/s um die Sonne und ist
deshalb sicher kein ausgezeichnetes Bezugssystem.
Als nächstes fragen wir deshalb, was mit den MAXWELL-LORENTZ Ätherrelationen bei einer GALILEI Transformation passiert. Mit anderen Worten: Wenn ein Beobachter die Richtigkeit der MAXWELL-LORENTZ Ätherrelationen bestätigt hat, zu welchem Ergebnis kommt dann ein anderer Beobachter, welcher sich mit seinem Labor gegen den ersten Beobachter mit
der konstanten Geschwingkeit W bewegt?
Mit den Ergebnissen der Übung 3.9 können wir für diesen Beobachter die
MAXWELL-LORENTZ Ätherrelationen leicht berechnen. Es folgt
D̄i = ǫ0 Ēi − ǫ0 (W × B̄)i ,
1
1
H̄i =
(B̄ + 2 W × (W × B̄))i − ǫ0 (W × Ē)i .
µ0
c
(3.93)
(3.94)
Aus zwei Gründen ist dies ein absurdes Result: (i) Es soll also höchstens
einen(!) GALILEI Beobachter mit den einfachen MAXWELL-LORENTZ
Ätherrelationen (3.92) geben? (ii) Die Gleichungen (3.93) und (3.94) widersprechen dem experimentellen Befund, wonach auch ein mit konstanter Geschwindigkeit W bewegter Beobachter die MAXWELL-LORENTZ
Ätherrelationen (3.92) konstatieren muss.
Aus diesem Dilemma kommen wir nur heraus, wenn wir annehmen, dass
zwei Beobachter mit konstanter Relativgeschwindigkeit W nicht über die
GALILEI Transformation t̄ = t, x̄i = xi − Wi t miteinander verknüpft sind.
94
Wir fragen deshalb: Durch welche Raumzeit Transformation muss die GALILEI Transformation ersetzen werden, damit im neuen Bezugssystem,
welches sich mit der Geschwindigkeit W bewegt, wieder die MAXWELLLORENTZ Ätherrelationen ind der alten Form (3.92) herauskommen?
Die LORENTZ Transformation. Aufgrund unseres Resultates (3.91)
wird diese Frage gelöst durch die Aufgabe: Bestimme eine Transformation
x̄A = x̄ˆA (x0 , x1 , x2 , x3 )
so dass gilt
−2
0
0
0
c
0 −1 0
0
0
0 −1 0
0
0
0 −1
xA = x̂A (x̄0 , x̄1 , x̄2 , x̄3 ),
⇔
AB
(3.95)
CD
0
0
c−2 0
ˆA ˆB
0
= ∂ x̄ ∂ x̄ 0 −1 0
.
0 −1 0
∂xC ∂xD 0
0
0
0 −1
(3.96)
Die gesuchte Transformation ist die berühmte LORENTZ Transformation.
Der Einfachheit wegen betrachten wir einen Beobacher S̄, der sich gegen
den Beobachter S mit der Geschwindigkeit W = (W, 0, 0) bewegt. In diesem Fall lautet die
LORENTZ Transformation
t− W
x1
c2
t̄ = q
,
2
1 − Wc2
x1 − W t
x̄1 = q
,
2
1 − Wc2
x1
t̄ + W
c2
q
,
t=
2
1 − Wc2
x̄1 + W t
q
x =
,
2
1 − Wc2
x̄2 = x2 ,
x̄3 = x3 .
(3.97)
Die inversen Transformation folgt durch Umstellen oder, was das dasselbe
ist, durch Vertauschen von x̄A mit xA bei gleichzeitiger Ersetzung W →
−W :
1
x2 = x̄2 ,
x3 = x̄3 .
(3.98)
Vor dem Beweis der Behauptung vergleichen wir die LORENTZ Transformation mit der entsprechenden
GALILEI Transformation
t̄ = t,
x̄1 = x1 − W t,
x̄2 = x2 ,
x̄3 = x3 .
(3.99)
Erninnere zunächst, dass die GALILEI Transformation auf höchst intuitiver Argumentation basiert. Trotzdem ist sie offensichtlich nicht der Lage,
95
das Verhalten elektromagnetischer Wellen für bewegte Beobachter richtig
vorherzusagen. Dagegen beruht die LORENTZ Transformation nicht auf
intuitiven Vorstellungen, sondern einzig auf der experimentell festgestellten Unabhängigkeit der Geschwindigkeitkeit elektromagnetischer Wellen
von der Quelle und vom Beobachter. Trotzdem sind die Konsequenzen, die
aus der Gültigkeit der LORENTZ Transformation gezogen werden können,
überraschend und sehr gewöhnungsbedürftig. Beispielsweise sagt die LORENTZ Transformation voraus, dass zwei identische Uhren nicht mehr synkron laufen, falls eine der Uhren sich mit der Geschwindigkeit W gegen die
andere Uhr bewegt. Dies folgt offensichtlich aus der Gleichung(3.97)1 . Später kommen wir hierauf und auf weitere Konsequenzen der neuen Raumzeit
Transformation zurück.
Jetzt aber beweisen wir die Behauptungen (3.97), (3.98) und zeigen zunächst, dass die Bedingung (3.96) eine lineare Transformation erzwingt.
Hierzu differenzieren wir (3.96) nach der Koordinate xE und erhalten
0=(
∂ x̄ˆA ∂ 2 x̄ˆB
∂ 2 x̄ˆA ∂ x̄ˆB
+
)g CD .
∂xE ∂xC ∂xD ∂xC ∂xE ∂xD
(3.100)
Hieraus gewinnen wir eine weitere Gleichung durch Vertauschung von E
und C. Diese addieren wir zu (3.100). Ausserdem bilden wir aus (3.100)
eine neue Gleichung durch Vertauschung von E und D und Addition zu
(3.100). Schließlich subtrahieren wir die beiden neuen Gleichungen. Wir
erhalten
∂ 2 x̄ˆA ∂ x̄ˆB CD
(3.101)
0 = 2 E C Dg .
∂x ∂x ∂x
Der Faktor der zweiten Ableitungen bildet wegen (3.95) und der Definition
der Metrik eine nichtsinguläre Matrix. Deshalb folgt
∂ 2 x̄ˆA
= 0.
∂xE ∂xC
(3.102)
Eine Transformation, die (3.96) erfüllt, ist somit linear. Wir machen also
den Ansatz
x̄A = LAB xB + aA .
(3.103)
Wir wählen die Transformation so, dass aus xA = 0 auch x̄A = 0 folgt und
können deshalb aA = 0 setzen. Wir erhalten somit
x̄A = LA0 x0 + LA1 x1 + LA2 x2 + LA3 x3 .
(3.104)
Die 16 konstanten Koeffizienten LAB bestimmen wir jetzt aus Symmetrieüberlegungen und den 10 Gleichungen (3.96).
96
Da wir nur eine Bewegung längs der parallelen Achsen x̄1 und x1 betrachten, muss natürlich gelten
x̄ˆ0 (x0 , x1 , x2 , x3 )
x̄ˆ0 (x0 , x1 , x2 , x3 )
x̄ˆ1 (x0 , x1 , x2 , x3 )
x̄ˆ1 (x0 , x1 , x2 , x3 )
x̄ˆ2 (x0 , x1 , x2 , x3 )
x̄ˆ3 (x0 , x1 , x2 , x3 )
x̄ˆ0 (x0 , x1 , −x2 , x3 ),
x̄ˆ0 (x0 , x1 , x2 , −x3 ),
x̄ˆ1 (x0 , x1 , −x2 , x3 ),
x̄ˆ1 (x0 , x1 , x2 , −x3 ),
x̄ˆ2 (x0 , x1 , x2 , −x3 ),
x̄ˆ2 (x0 , x1 , −x2 , x3 ).
=
=
=
=
=
=
(3.105)
Hieraus folgt mit (3.103)
L02 = 0, L03 = 0, L12 = 0, L13 = 0, L23 = 0, L32 = 0.
(3.106)
Ferner muss eine Vertauschung von x2 und x3 eine Vertauschung von x̄2
und x̄3 zur Folge haben. Mit anderen Worten,
x̄2 = L20 t + L21 x1 + L22 x2 ,
x̄3 = L30 t + L31 x1 + L33 x3
(3.107)
x̄2 = L30 t + L31 x1 + L33 x2 .
(3.108)
impliziert
x̄3 = L20 t + L21 x1 + L22 x3 ,
Dies liefert
L22 = L33 =: L2 ,
L21 = L31 =: L1 ,
L20 = L30 =: L0 .
(3.109)
Diese Symmetrieüberlegungen haben die Bestimmung von 16 Koeffizienten
auf 7 Koeffizienten reduziert. Ausgeschrieben lautet dieses Zwischenresultat
t̄ = L00 t + L01 x1 ,
x̄1 = L10 t + L11 x1 ,
(3.110)
x̄3 = L0 t + L1 x1 + L2 x3 .
(3.111)
sowie
x̄2 = L0 t + L1 x1 + L2 x2 ,
Diese Resultate setzten wir nun in die Gleichungen (3.96) ein und erhalten
zwei Blöcke unabhängiger Gleichungen. Die Komponenten 00, 11 und 01
von (3.96) liefern
1
1
= 2 L00 L00 − L01 L01 ,
2
c
c
1
−1 = 2 L10 L10 − L11 L11 ,
c
1
0 = 2 L00 L10 − L01 L11 .
c
97
(3.112)
(3.113)
(3.114)
Der andere Block der Gleichungen (3.96) betrifft die Komponenten 22, 02,
12 und 23,
1
(L0 )2 − (L1 )2 − (L2 )2 ,
2
c
1
0 = 2 L00 L0 − L01 L1 ,
c
1
0 = 2 L10 L0 − L11 L1 ,
c
1
0 = 2 (L0 )2 − (L1 )2 .
c
(3.115)
−1 =
(3.116)
(3.117)
(3.118)
Das System (3.112)-(3.114) liefert für vier Unbekannte drei Gleichungen
und definiert somit eine 1-parametrige Schar von Lösungen. Als Parameter
wählen wir die Beobachtergeschwindigkeit W und setzen
L10 = −W L11 .
(3.119)
Dies setzen wir ein in (3.113) und berechnen L11 . Anschließend gehen
wir hiermit in (3.117) und erhalten eine Beziehung zwischen L01 und L00 .
Schließlich folgt dann aus (3.115) L00 :
(L11 )2 = (1 −
W 2 −1
) ,
c2
L01 = −
W 0
L ,
c2 0
(L00 )2 = (1 −
W 2 −1
) . (3.120)
c2
Als nächstes betrachten wir die Gleichungen (3.115) – (3.118). Die Gleichungen (3.116) und (3.117) sind homogene Gleichungen für L0 , L1 mit
nicht verschwindender Determinante. Folglich gilt
L0 = 0,
L1 = 0 und mit (3.115): L22 = 1.
(3.121)
Zum Schluss des Beweises müssen wir noch eine Aussage über die beiden
möglichen Lösungen von (3.120) treffen. Wir entscheiden uns für die positiven Lösungen damit im Grenzfall W/c → 0 die GALILEI Transformation
(3.99) herauskommt. Damit ist die spezielle LORENTZ Transformation
(3.100) bewiesen.
Der Doppler Effekt bei LORENTZ Transformation. Wir betrachten
noch einmal die in den Abbildungen 3.4 und 3.5 dargestellten Situationen:
Ein endlicher Wellenzug bewegt sich nach rechts, wobei die Charakteristika
des Wellenzuges, N - Periodenzahl, λ - Wellenlänge, ν - Frequenz und c Phasengeschwindigkeit, von zwei Beobachtern S und S̄ detektiert werden.
Die Relativgeschwindigkeit zwischen S und S̄ längs des Wellenzuges ist
98
W . Wie vorher nehmen wir an, dass beide Beobachter die gleiche Zahl von
Perioden feststellen, d.h. es gilt wieder (3.67), nämlich
N=
1
1
(c(t1 − t0 ) − (x1 − x0 )) = (c̄(t̄1 − t̄0 ) − (x̄1 − x̄0 )).
λ
λ̄
(3.122)
Diese Invariante haben wir oben für die GALILEI Transformation ausgewertet und tun dies jetzt für die LORENTZ Transformation. Wir wissen
bereits dass c̄ = c gilt, und dann folgt
1 + W/c
1
(c(t1 − t0 ) − (x1 − x0 )). (3.123)
(c(t1 − t0 ) − (x1 − x0 )) = p
λ
λ̄ 1 − W 2 /c2
Hieraus erhalten wir eine Aussage über das Verhalten der Wellenlänge und
der Frequenz, wofür wir noch die Beziehungen λ ν = c = λ̄ ν̄ verwenden:
s
s
1 + W/c
1 − W/c
λ̄ = λ
, ν̄ = ν
.
(3.124)
1 − W/c
1 + W/c
Im Gegensatz zu Dopplerformeln (3.69) - (3.71) bei GALILEI Transformation fehlt jetzt jeglicher Bezug auf die Geschwindigkeiten von Quelle bzw.
Beobachter gegen ein Medium, in welchem sich elektromagnetische Wellen
ausbreiten.
Ladungs- und Stromdichte bei LORENTZ Transformation. Die
Transformationsformeln (3.84)1 für den Ladungs-Stromvektor
j A = (ne , j1e , j2e , j3e ) liefern bei LORENTZ Transformation
ne − W/c2 j1e
n̄e = p
,
1 − W 2 /c2
j e − W ne
j̄1e = p 1
,
1 − W 2 /c2
j̄2e = j2e ,
j̄3e = j3e .
(3.125)
Bei GALILEI Transformation lauten die entsprechenden Gleichungen
n̄e = ne ,
j̄1e = j1e − W ne ,
j̄2e = j2e ,
j̄3e = j3e .
(3.126)
Während also die elektrische Ladungsdichte bei GALILEI Transformation
ein objektiver Skalar ist, folgt bei LORENTZ Transformation ein erheblich komplizierteres Verhalten. Ein gegen eine ruhende Ladungsverteilung
bewegter Beobachter sieht einen elektrischen Strom, was intuitive klar ist.
Dieser Strom aber erhöht die Ladungsdichte!
Elektromagnetische Felder bei LORENTZ Transformation. Als
nächstes bestimmen wir das Verhalten der Felder E und B unter LORENTZ Transformation. Das entsprechende Verhalten der Felder D und H
99
folgt dann aus den MAXWELL-LORENTZ Ätherrelationen. Wir setzen die
LORENTZ Transformation (3.100) in die Transformationsformeln (3.84)2
ein und erhalten
E2 − W B3
,
Ē2 = q
W2
1 − c2
Ē1 = E1 ,
B̄1 = B1 ,
B̄2 =
E3 + W B2
Ē3 = q
,
W2
1 − c2
B2 + W/c2 E3
q
,
2
1 − Wc2
B̄3 =
(3.127)
E3 − W/c2 E2
q
. (3.128)
2
1 − Wc2
Übung 3.10 Erläutere und interpretiere die Unterschiede zu
den entsprechenden Gleichungen, die wir für die
GALILEI Transformation erhalten haben.
Schließlich geben noch die Transformationsformeln für Polarisation und
Magnetisierung an. Wir starten mit den allgemeinen Transformationen
(3.85)2 und setzten dort die LORENTZ Transformation ein. Es folgt
P̄1 = P1 ,
m̄1 = m1 ,
P̄2 =
P2 + W/c2 m3
q
,
W2
1 − c2
m2 − W P3
m̄2 = q
,
2
1 − Wc2
100
P̄3 =
P3 − W/c2 m2
q
, (3.129)
W2
1 − c2
m3 − W P2
m̄3 = q
.
2
1 − Wc2
(3.130)