DE102015225759A120170622
Werbung

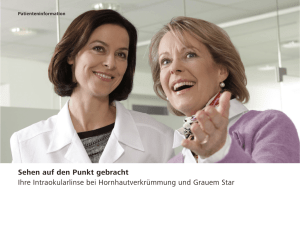
(19) *DE102015225759A120170622* (10) DE 10 2015 225 759 A1 2017.06.22 Offenlegungsschrift (12) A61B 3/107 (2006.01) (21) Aktenzeichen: 10 2015 225 759.2 (22) Anmeldetag: 17.12.2015 (43) Offenlegungstag: 22.06.2017 (51) Int Cl.: (71) Anmelder: Carl Zeiss Meditec AG, 07745 Jena, DE (56) Ermittelter Stand der Technik: (72) Erfinder: Findl, Oliver, Prof. Dr., Wien, AT; Trost, Michael, 07646 Stadtroda, DE; Hirnschall, Nino, Dr., Wien, AT; Volkwardt, Martin, 17440 Kröslin, DE; Bajramovic, Ferid, Dr., 07745 Jena, DE; Teuber, Tanja, Dr., 73431 Aalen, DE A61F 9/00 (2006.01) A61F 2/16 (2006.01) DE 10 2011 106 714 DE 11 2013 002 998 A1 T5 Rechercheantrag gemäß § 43 Abs. 1 Satz 1 PatG ist gestellt. Die folgenden Angaben sind den vom Anmelder eingereichten Unterlagen entnommen (54) Bezeichnung: Verfahren zur Vorhersage der anatomischen, postoperativen Position und Lage einer Intraokularlinse (57) Zusammenfassung: Die Kenntnis der anatomischen, postoperativen Position und Lage beeinflusst nicht nur die Auswahl der zu implantierenden IOL sondern auch das Ergebnis des refraktiven Eingriffs am Auge. Bei dem Verfahren zur Vorhersage der anatomischen, postoperativen Position (ALP) und Lage einer in ein Auge zu transplantierenden Intraokularlinse (IOL) auf der Basis präoperativer Messwerte, wie beispielsweise Vorderkammertiefe (VKT), Linsendicke (LD) und Augenlänge (AL) werden erfindungsgemäß zusätzlich oder ausschließlich die Krümmung(en) der Augenlinse oder daraus abgeleiteter Messwerte verwendet. Das vorgeschlagene Verfahren dient der Vorhersage der anatomischen, postoperativen Position (ALP) und Lage einer in ein Auge zu transplantierenden Intraokularlinse (IOL). Im Gegensatz zu Verfahren, die nur eine virtuelle Position der IOL ermitteln, wird mit dem erfindungsgemäßen Verfahren die tatsächliche postoperative Position und Lage einer IOL beschrieben, die beispielsweise für weitere Verfahren, wie das Raytracing zwingend erforderlich sind. DE 10 2015 225 759 A1 2017.06.22 [0008] Obwohl für die Ermittlung beider Werte präoperativ verfügbare Messwerte erforderlich sind, sind die Ergebnisse der Ermittlung grundverschieden. Während sich der Prädiktor für die ELP postoperativ auf die subjektive Refraktion stützt, basiert er für die ALP auf der tatsächlich gemessenen IOLPosition, die für weitere Verfahren, wie beispielsweise das Raytracing erforderlich ist. Beschreibung [0001] Die vorliegende Erfindung betrifft ein Verfahren zur Vorhersage der anatomischen, postoperativen Position und Lage einer in ein Auge implantierten Intraokularlinse (IOL). Einer derartigen Vorhersage kommt dabei eine wesentliche Rolle zu, da deren Kenntnis die Auswahl der zu implantierenden IOL und damit auch das Ergebnis des refraktiven Eingriffs am Auge wesentlich beeinflusst. [0009] Unter Raytracing ist, wie schon der Begriff andeutet („ray" = Strahl, "to trace" = zurückverfolgen) ein Verfahren zur Strahlverfolgung zu verstehen. Gegenstände in unserer Umwelt nehmen wir bekanntlich nur wahr, weil sie von einer Lichtquelle bestrahlt werden und sie diese Lichtstrahlen reflektieren, von denen ein Teil schließlich unsere Augen erreichen. Das Raytracing-Verfahren simuliert dieses elementare Naturphänomen. Ist das optische System, d. h. das individuelle menschliche Auge mit all seinen optischen Elementen bekannt, so kann mittels des Raytracing ein „real" auf der Retina entstehendes Abbild berechnet werden. Das Verfahren beruht somit auf einem detaillierten Augenmodel unter Verwendung der Hornhauttopographie des Auges. [0002] Nach dem bekannten Stand der Technik lassen sich die Lösungen zur Vorhersage der Position, an der sich eine Intraokularlinse nach einem refraktiven Eingriff im Auge stabilisiert wird in zwei Gruppen unterteilen. [0003] Bei den heute üblichen und die erste Gruppe bildenden, Formel-basierten Verfahren findet eine Vorhersage der anatomischen, postoperativen Position einer IOL im eigentlichen Sinne nicht statt. [0004] Vielmehr gehen die Formel-basierten Verfahren zur Vorhersage einer postoperativen Linsenposition von unterschiedlichen Annahmen aus, die auf den verschiedensten biometrischen Parametern des Auges basieren. Es wird lediglich ein virtueller Rechenparameter vorhergesagt, der zwar konzeptionell von einer IOL-Lage abgeleitet, aber durch Konstantenoptimierung erzeugt wurde. Die dadurch bestimmte, formelspezifische Linsenposition wird auch als postoperativen, effektiven Linsenposition (ELP) bezeichnet und ist nicht mit einer tatsächlichen, postoperativen Linsenposition zu verwechseln. [0010] In der US 5,968,095 A wird ein Verfahren zur präoperativen Auswahl einer in ein Auge zu implantierenden IOL beschrieben. Ein Verfahrensschritt beinhaltet die Bestimmung der Position der haptischen Linsenebene des Auges, in der die IOL fixiert werden soll. Die Bestimmung der Position der haptischen Linsenebene kann dabei sowohl mittels UltraschallBiomikroskopie als auch mittels optischer Kohärenztomographie oder -mikroskopie bzw. mittels Scheimpflug-Fotografie bestimmt werden. Nach der Bestimmung weiterer Parameter, wie Hornhautbrechkraft und axialer Länge werden infrage kommende, zu implantierende IOL, in Abhängigkeit von der gewünschten postoperativen Brechkraft berechnet und das zu verwendende IOL-Design ausgewählt. Mit dieser Methode lässt sich somit unabhängig vom individuellen IOL-Design die ALP der implantierten IOL vorhersagen. [0005] Bei den bekannten Methoden zur Vorhersage bzw. Bestimmung der postoperativen ELP wirkt sich nachteilig aus, dass keine der bekannten Methoden ohne empirische Korrekturfaktoren auskommt. Ein Grund dafür sind individuelle, postoperative Heilungsprozesse, die sich meist über einen Zeitraum von mehreren Wochen hinziehen, bei den bisherigen Methoden keine Berücksichtigung finden. Ein weiterer Grund ist darin zu sehen, dass trotz verschiedenster Methoden nur eine ungenügende Anzahl für die Bestimmung der ELP relevanter Parameter bei der Vorhersage berücksichtigt wird. [0011] Auch in der WO 2012/120080 A1 wird ein Verfahren zum Vorhersagen der postoperativen Position einer implantierten IOL beschrieben, bei dem die Position und Dicke der vorhandenen kristallinen Linse präoperativ bestimmt und aus dieser Informationen eine einzelne numerische Konstante C berechnet wird, um die postoperative Position der implantierten IOL vorherzusagen. In die Berechnung der Konstanten C fließen neben dem IOL-Typ und dem Patiententyp auch Informationen bezüglich einer oder mehrerer, am Auge operierten Individuen mit ein. Die Erfindung geht von der Annahme aus, dass sich eine IOL bei einer definierten, von der Position und Dicke der kristallinen Linse im präoperativen Auge abhängigen Position lokalisieren wird. Die ALP der [0006] Ein weiteres Problem liegt im Optimierungsverfahren zur Verbesserung der postoperativen Refraktionsergebnisse, bei dem die Berücksichtigung einzelner Fehlerquellen ausgeschlossen ist. [0007] Im Gegensatz dazu wird bei der zweiten Gruppe versucht, die anatomische, postoperative Position (ALP) der IOL vorher zu sagen, die auch der tatsächlichen postoperativen Position auf der optischen Achse des Auges entspricht. 2/9 DE 10 2015 225 759 A1 2017.06.22 implantierten IOL wird basierend auf dieser Annahme vorhergesagt. [0017] Die Erfindung wird nachfolgend anhand von Ausführungsbeispielen näher beschrieben. Dazu zeigen: [0012] Das in der DE 10 2011 106 714 A1 beschriebene Verfahren dient ebenfalls der präoperativen Auswahl einer, in ein Auge zu implantierenden Intraokularlinse, wobei die Ergebnisse der refraktiven Eingriffe am Auge durch eine Vorhersage der postoperativen, anatomischen Position der implantierten IOL optimiert werden soll. Bei dem hier beschriebenen Verfahren wird die postoperative Linsenposition anhand bekannter Messwerte, wie der Hornhautdicke, der Vorderkammertiefe, der Augenlänge sowie der Abstände des Kapselsackäquators bzw. der Linsenhaptik zur Linsenvorderfläche vorhergesagt. Dabei gehen neben der anatomischen, postoperativen Position der zu implantierenden Intraokularlinse auch deren Position in die Berechnung ein, wozu zusätzliche, bisher noch nicht berücksichtigte Parameter des pseudophaken Auges verwendet werden. Das vorgeschlagene Verfahren ist für eine exaktere Voraussage der Stärke und Art einer im Rahmen eines chirurgischen Katarakt- oder refraktiven Eingriffes in ein pseudophakes Auge zu implantierenden Intraokularlinse geeignet. Dabei basiert das Verfahren auf der Verwendung geeigneter Berechnungsmethoden, wie z. B. geometrisch-optischer Formeln oder des Raytracings. [0018] Fig. 1: an die Krümmung der Vorderfläche der Augenlinse angefittete Funktion zur Ermittlung der Position des Kapselsackäquators, [0019] Fig. 2: an die Krümmungen von Vorder- und Rückfläche der Augenlinse angefittete Funktionen zur Ermittlung der Position des Kapselsackäquators, [0020] Fig. 3: die Korrelation des anhand der Krümmung von Vorder- und Rückfläche bestimmten Kapselsackäquators mit der anatomischen, postoperativen Position der transplantierten Intraokularlinse und [0021] Fig. 4: die anatomisch, postoperative Lage einer implantierten IOL im Kapselsackäquator. [0022] Bei dem Verfahren zur Vorhersage der anatomischen, postoperativen Position (ALP) und Lage einer in ein Auge zu transplantierenden Intraokularlinse (IOL) auf der Basis präoperativer Messwerte, wie beispielsweise Vorderkammertiefe (VKT), Linsendicke (LD) und Augenlänge (AL) werden erfindungsgemäß zusätzlich oder ausschließlich die Krümmung (en) der Augenlinse oder daraus abgeleiteter Messwerte verwendet. Da die Vorhersage der anatomischen, postoperativen Position (ALP) darauf basiert, dass die transplantierte Intraokularlinse (IOL) mit ihrer Haptik im Kapselsackäquator zur Lage kommt, wird erfindungsgemäß die Position des Kapselsackäquators und/oder mit dieser korrelierende Messwerte bestimmt. [0013] Der vorliegenden Erfindung liegt die Aufgabe zugrunde die Nachteile der nach dem Stand der Technik bekannten Lösungen zu beseitigen und die Vorhersage der anatomischen, postoperativen Linsenposition (ALP) einer in ein Auge zu implantierenden IOL zur optimierten. [0014] Diese Aufgabe wird mit dem erfindungsgemäßen Verfahren zur Vorhersage der anatomischen, postoperativen Position (ALP) und Lage einer in ein Auge zu transplantierenden Intraokularlinse (IOL) auf der Basis präoperativer Messwerte, wie beispielsweise Vorderkammertiefe (VKT), Linsendicke (LD) und Augenlänge (AL), dadurch gelöst, dass zusätzlich oder ausschließlich die Krümmung(en) der Augenlinse oder daraus abgeleiteter Messwerte verwendet werden. [0023] Gemäß einer ersten vorteilhaften Ausgestaltung wird als weiterer präoperativer Messwert die Krümmung der Vorderfläche der Augenlinse entlang verschiedener Meridiane detektiert und die Position des Kapselsackäquators auf der optischen Achse des Auges oder mit dieser korrelierende Messwerte bestimmt. Erfindungsgemäß erfolgt die Detektion der Krümmung der Fläche der Augenlinse entlang mindestens 3, vorzugsweise 6, besonders bevorzugt mehr als 18 verschiedener Meridiane. Die Bestimmung der Position des Kapselsackäquators auf der optischen Achse des Auges oder eines mit dieser korrelierenden Messwertes erfolgt für jeden Meridian unter Zuhilfenahme mindestens eines präoperativen Messwertes, vorzugsweise der Linsendicke (LD). Aus den für die einzelnen Meridiane ermittelten Messwerten kann ein Mittelwert gebildet werden, wobei sogenannte Ausreißer bei der Bildung des Mittelwertes vorzugsweise unberücksichtigt bleiben. Durch diese Verfahrensweise kann die Genauigkeit der Position des Kapselsackäquators auf der optischen Achse des Auges oder eines mit dieser korrelierenden Messwertes wesentlich verbessert werden. [0015] Bevorzugte Weiterbildungen und Ausgestaltungen sind Gegenstand der abhängigen Ansprüche. [0016] Das vorgeschlagene Verfahren dient der Vorhersage der anatomischen, postoperativen Position (ALP) und Lage einer in ein Auge zu transplantierenden Intraokularlinse (IOL). Im Gegensatz zu Verfahren, die nur eine virtuelle Position der IOL ermitteln, wird mit dem erfindungsgemäßen Verfahren die tatsächliche postoperative Position und Lage einer IOL beschrieben, die beispielsweise für weitere Verfahren, wie das Raytracing zwingend erforderlich sind. 3/9 DE 10 2015 225 759 A1 2017.06.22 [0024] Hierzu zeigt die Fig. 1 den Scan eines realen Auges, in dem die Augenlinse L und die Hornhaut HH zu sehen sind. An die Krümmung der Vorderfläche der Augenlinse L ist zur Ermittlung der Position des Kapselsackäquators KSÄ eine Funktion F1 angefittet. Die Position des Kapselsackäquators KSÄ wird durch den Schnittpunkt mit der optischen Achse AOPT charakterisiert. Messwertes ist kein weiterer präoperativer Messwert erforderlich. [0030] Aus den für die einzelnen Meridiane ermittelten Messwerten kann auch bei dieser Ausgestaltung des Verfahrens ein Mittelwert gebildet werden, wobei sogenannte Ausreißer bei der Bildung des Mittelwertes vorzugsweise unberücksichtigt bleiben. Durch diese Verfahrensweise kann die Genauigkeit der Position des Kapselsackäquators auf der optischen Achse des Auges oder eines mit dieser korrelierenden Messwertes wesentlich verbessert werden. [0025] Einer zweiten vorteilhaften Ausgestaltung entsprechend werden zusätzlich die Lage, d. h. deren Verkippung und/oder Dezentrierung der Vorderfläche der Augenlinse gegenüber der optischen Achse des Auges detektiert, indem die Vorderfläche durch interpolieren vervollständigt, durch anfitten von Funktionen extrapoliert und die Lage der vom Kapselsackäquator aufgespannten Ebene bezüglich der optischen Achse des Auges oder mit dieser korrelierende Messwerte bestimmt. Die Bestimmung der Lage der vom Kapselsackäquator aufgespannten Ebene erfolgt auch hier unter Zuhilfenahme mindestens eines präoperativen Messwertes, vorzugsweise der Linsendicke (LD). [0031] Hierzu zeigt die Fig. 2 ebenfalls den Scan eines realen Auges, in dem die Augenlinse L und die Hornhaut HH zu sehen sind. An die Krümmungen der Vorder- und Rückfläche der Augenlinse L sind zur Ermittlung der Position des Kapselsackäquators KSÄ Funktionen F1 und F2 angefittet. Der Kapselsackäquator KSÄ ist durch die Gerade durch die Schnittpunkte der beiden Funktionen F1 und F2 und dessen Position durch den Schnittpunkt dieser Geraden mit der optischen Achse AOPT charakterisiert [0026] Während sich die Verkippung der vom Kapselsackäquator aufgespannten Ebene gegenüber der optischen Achse des Auges auf einfache Weise ergibt, sind für die Ermittlung deren Dezentrierung zusätzliche mathematische Berechnungen erforderlich. [0032] Einer vierten vorteilhaften Ausgestaltung entsprechend werden zusätzlich die Lage, d. h. deren Verkippung und/oder Dezentrierung der Vorder- und/ oder Rückfläche der Augenlinse gegenüber der optischen Achse des Auges detektiert, die Krümmungen durch interpolieren zu Krümmungsflächen vervollständigt, durch anfitten von Funktionen extrapoliert und zum Schneiden gebracht. Die sich daraus ergebende Schnittebene entspricht der Lage der vom Kapselsackäquator aufgespannten Ebene oder mit dieser korrelierenden Messwerten bezüglich der optischen Achse. [0027] Für die Bestimmung der Dezentrierung kann beispielsweise der Schwerpunkt der vom Kapselsackäquator aufgespannten Ebene genutzt werden. Es ist aber auch möglich das gesamte kugelsegmentähnliche Gebilde zu betrachten, ein Lot im höchsten Punkt der Krümmung zu fällen und den Schnittpunkt mit der vom Kapselsackäquator aufgespannten Ebene für die Bestimmung der Dezentrierung zu nutzen. Prinzipiell ist es außerdem möglich für die Bestimmung der Dezentrierung präoperative Messwerte zu nutzen. [0033] Auch für die Bestimmung der Lage der vom Kapselsackäquator aufgespannten Ebene bezüglich der optischen Achse des Auges ist kein weiterer präoperativer Messwert erforderlich. [0028] Gemäß einer dritten vorteilhaften Ausgestaltung werden die Krümmung sowohl der Vorder- als auch der Rückfläche der Augenlinse detektiert, beide Krümmungen durch anfitten von Funktionen extrapoliert, zum Schneiden gebracht. Der Schnittpunkt der Geraden durch die Schnittpunkte beider Krümmungen mit der optischen Achse entspricht dann der Position des Kapselsackäquators oder eines mit dieser korrelierenden Messwertes. Erfindungsgemäß erfolgt die Detektion der Krümmungen der Vorderund Rückfläche auch hier entlang mindestens 3, vorzugsweise 6, besonders bevorzugt mehr als 18 verschiedener Meridiane. [0034] In Bezug auf die Bestimmung der Verkippung bzw. Dezentrierung der vom Kapselsackäquator aufgespannten Ebene wird auf die zweite vorteilhafte Ausgestaltung verwiesen. [0035] Erfindungsgemäß erfolgt für alle Ausgestaltungen des Verfahrens die Bestimmung der Position des Kapselsackäquators oder der Lage der vom Kapselsackäquator aufgespannten Ebene oder mit diesen korrelierenden Messwerten derart, dass die detektierte(n) Krümmung(en) der Fläche(n) der Augenlinse ausschließlich oder mit weiteren postoperativ erfassten Messwerten bezüglich Lage und/oder Position implantierter IOL in Beziehung gebracht und dann als Funktion verallgemeinert werden. [0029] Hierbei ist für die Bestimmung der Position des Kapselsackäquators auf der optischen Achse des Auges oder eines mit dieser korrelierenden [0036] Erfindungsgemäß entspricht die Beziehung zwischen der(den) detektierte(n) Krümmung(en) der 4/9 DE 10 2015 225 759 A1 2017.06.22 Fläche(n) der Augenlinse und der bestimmten Lage und/oder Position des Kapselsackäquators oder mit diesen korrelierenden Messwerten einer linearen Funktion der Form f(x) = mx + n. [0037] Hierzu zeigt die Fig. 3 die Korrelation des anhand der Krümmung von Vorder- und Rückfläche bestimmten Kapselsackäquators mit der anatomischen, postoperativen Position der transplantierten Intraokularlinse. [0038] Auf der Abszisse des Koordinatensystems sind die anatomisch, postoperativen Positionen transplantierter Intraokularlinsen und auf der Ordinate ermittelte Position des Kapselsackäquators abgetragen. Den eingetragenen Messwerten ist zu entnehmen, dass dieser Zusammenhang einer linearen Funktion der Form f(x) = mx + n folgt. [0039] Mit der Erfindung wird ein Verfahren zur Verfügung gestellt, mit der auf der Basis präoperativer Messwerte die anatomische, postoperative Position (ALP) und Lage einer in ein Auge zu transplantierenden IOL mit hoher Genauigkeit vorhergesagt werden kann. Eine exakte Vorhersage wird insbesondere dadurch möglich, dass die transplantierte Intraokularlinse (IOL) mit ihrer Haptik im Kapselsackäquator zur Lage kommt. [0040] Die Fig. 4 zeigt ebenfalls den Scan eines realen Auges, in dem allerdings die Hornhaut HH und die Intraokularlinse IOL zu sehen sind. In der Abbildung ist neben der optischen Achse AOPT auch der Kapselsackäquator KSÄ dargestellt. Dadurch ist der Abbildung zu entnehmen, dass die Intraokularlinse IOL mit ihrer Haptik im Kapselsackäquator KSÄ zur Lage kommt. [0041] Der besondere Vorteil des erfindungsgemäßen Verfahrens ist darin zu sehen, dass eine Erweiterung der Pupille nicht erforderlich ist, wodurch die Belastung des Patienten verringert werden kann. [0042] Für die Definition eines Prädiktors für die Vorhersage der anatomisch, postoperativen Position ALP und Lage sind also solche präoperativen Messwerte heranzuziehen, die mit der postoperativen Lage der IOL korrelieren, wie z. Bsp. Hornhautdicke (ACD) Linsendicke (LD), Augenlänge (AL), oder auch die Krümmung der natürlichen augenlinse oder daraus abgeleitete Messwerte. 5/9 DE 10 2015 225 759 A1 2017.06.22 ZITATE ENTHALTEN IN DER BESCHREIBUNG Diese Liste der vom Anmelder aufgeführten Dokumente wurde automatisiert erzeugt und ist ausschließlich zur besseren Information des Lesers aufgenommen. Die Liste ist nicht Bestandteil der deutschen Patent- bzw. Gebrauchsmusteranmeldung. Das DPMA übernimmt keinerlei Haftung für etwaige Fehler oder Auslassungen. Zitierte Patentliteratur - US 5968095 A [0010] WO 2012/120080 A1 [0011] DE 102011106714 A1 [0012] 6/9 DE 10 2015 225 759 A1 2017.06.22 8. Verfahren nach Anspruch 6, dadurch gekennzeichnet, dass zusätzlich die Verkippung und/oder Dezentrierung der Vorder- und/oder Rückfläche der Augenlinse gegenüber der optischen Achse des Auges detektiert, die Krümmungen durch interpolieren zu Krümmungsflächen vervollständigt, durch anfitten von Funktionen extrapoliert und zum Schneiden gebracht werden und die sich daraus ergebende Schnittebene der Lage des vom Kapselsackäquator aufgespannten Ebene oder mit dieser korrelierenden Messwerten bezüglich der optischen Achse entspricht. Patentansprüche 1. Verfahren zur Vorhersage der anatomischen, postoperativen Position (ALP) und Lage einer in ein Auge zu transplantierenden Intraokularlinse (IOL) auf der Basis präoperativer Messwerte, wie beispielsweise Vorderkammertiefe (VKT), Linsendicke (LD) und Augenlänge (AL), dadurch gekennzeichnet, dass zusätzlich oder ausschließlich die Krümmung(en) der Augenlinse oder daraus abgeleiteter Messwerte verwendet werden. 2. Verfahren nach Anspruch 1, dadurch gekennzeichnet, dass die Vorhersage der anatomischen, postoperativen Position (ALP) darauf basiert, dass die transplantierte Intraokularlinse (IOL) mit ihrer Haptik im Kapselsackäquator zur Lage kommt und dem entsprechend die Position des Kapselsackäquators und/oder mit dieser korrelierende Messwerte bestimmt werden. 9. Verfahren nach den Ansprüchen 4 und 7, dadurch gekennzeichnet, dass die Detektion der Krümmung(en) der Fläche(n) der Augenlinse entlang mindestens 3, vorzugsweise 6, besonders bevorzugt mehr als 18 verschiedener Meridiane erfolgt. 10. Verfahren nach den Ansprüchen 3 bis 8, dadurch gekennzeichnet, dass die Bestimmung von Position und/oder Lage des Kapselsackäquators oder mit diesen korrelierender Messwerte derart erfolgt, dass die detektierte(n) Krümmung(en) der Fläche(n) der Augenlinse zu postoperativ erfassten Messwerten bezüglich Lage und/oder Position implantierter IOL in Beziehung gebracht und dann als Funktion verallgemeinert werden. 3. Verfahren nach den Ansprüchen 1 und 2, dadurch gekennzeichnet, dass als weiterer präoperativer Messwert die Krümmung der Vorderfläche der Augenlinse detektiert und die Position des Kapselsackäquators auf der optischen Achse des Auges oder mit dieser korrelierende Messwerte bestimmt werden. 11. Verfahren nach Anspruch 9, dadurch gekennzeichnet, dass die Beziehung zwischen der(den) detektierte(n) Krümmung(en) der Fläche(n) der Augenlinse und der bestimmten Lage und/oder Position des Kapselsackäquators oder mit diesen korrelierenden Messwerten einer linearen Funktion der Form f(x) = mx + n entsprechen. 4. Verfahren nach Anspruch 3, dadurch gekennzeichnet, dass die Detektion der Krümmung der Vorderfläche der Augenlinse entlang verschiedener Meridiane erfolgt. 5. Verfahren nach Anspruch 3, dadurch gekennzeichnet, dass zusätzlich die Verkippung und/oder Dezentrierung der Vorderfläche der Augenlinse gegenüber der optischen Achse des Auges detektiert, indem die Krümmungen durch interpolieren zu Krümmungsfläche vervollständigt, durch anfitten von Funktionen extrapoliert und die Lage der vom Kapselsackäquator aufgespannten Ebene bezüglich der optischen Achse des Auges oder mit dieser korrelierende Messwerte bestimmt werden. Es folgen 2 Seiten Zeichnungen 6. Verfahren nach Anspruch 1, dadurch gekennzeichnet, dass die Krümmungen sowohl der Vorderals auch der Rückfläche der Augenlinse detektiert, beide Krümmungen durch anfitten von Funktionen extrapoliert und zum Schneiden gebracht werden und der Schnittpunkt der Geraden durch die Schnittpunkte beider Krümmungen mit der optischen Achse der Position des Kapselsackäquators oder einem mit dieser korrelierenden Messwert entspricht. 7. Verfahren nach Anspruch 5, dadurch gekennzeichnet, dass die Detektion der Krümmungen sowohl der Vorder- als auch der Rückfläche der Augenlinse entlang verschiedenen Meridiane erfolgt. 7/9 DE 10 2015 225 759 A1 2017.06.22 Anhängende Zeichnungen 8/9 DE 10 2015 225 759 A1 2017.06.22 9/9