Arbeitsraumüberwachung, Themenflyer des Fraunhofer IFF
Werbung

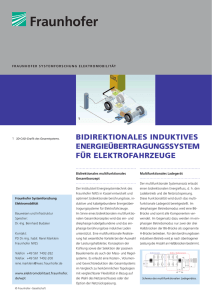
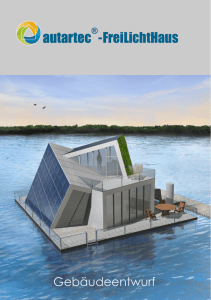
Fraunhofer-Institut für fabrikbetrieb 2 Sicherheit für die Zusammenarbeit von Mensch und Roboter 5 u n d - a u t o m a t i s i e r u n g I F F, M a g d e b u r g Fraunhofer-Institut für Fabrikbetrieb ARBEITSRAUMÜBERWACHUNG u n d - a u t o m at i s i e r u n g I F F Institutsleiter Prof. Dr.-Ing. habil. Prof. E. h. Dr. h. c. mult. Michael Schenk Die Vision einer kooperativen Zusammenarbeit von Mensch und Maschine in gemeinsamen Arbeitsräumen wird schon in naher Sandtorstraße 22 Zukunft Realität werden. 39106 Magdeburg Wo heute noch Schutzeinrichtungen Menschen und z. B. Ro­ Telefon 0391 4090-0 boter voneinander trennen, werden neuartige Sensorsysteme Telefax 0391 4090-596 im Zusammenspiel mit geeigneten Planungswerkzeugen ihre [email protected] gemeinsamen Arbeitsräume überwachen. Beim Eintritt des www.iff.fraunhofer.de Menschen in diese Risikobereiche können die Systeme zu seiner Sicherheit beispielsweise die Reduzierung der Arbeits­geschwin­ Ansprechpartner digkeit des Roboters veranlassen oder diesen voll­ständig stop­ Geschäftsfeld Robotersysteme pen. Dr. techn. Norbert Elkmann Telefon 0391 4090-222 Außer im industriellen Sektor sind sichere optische Arbeitsraum­ Telefax 0391 4090-250 überwachungssysteme zukünftig auch in vielfältigen anderen [email protected] Einsatzgebieten notwendig und die Basis für neue Roboterappli­ kationen. Dipl.-Ing. Christoph Walter Neben der Übernahme von aktiven Sicherheitsfunktionen wer­ Telefon 0391 4090-246 den dann auch andere Aspekte wie die ergonomische Interakti­ Telefax 0391 4090-250 on mit dem Menschen (Soft-Safety) von Bedeutung sein, indem [email protected] sie etwa kritische Sicherheitsbereiche auch durch bloße Signal­ gebung anzeigen. www.iff.fraunhofer.de/rs © Fraunhofer IFF, Magdeburg 05/2012 Fotos: Fraunhofer IFF; 5 Viktoria Kühne 3 4 PROJEKTIONS- UND KAMERA­ BASIERTE OPTISCHE ARBEITSRAUMÜBERWACHUNG PLANUNG UND ANALYSE VON MENSCH-ROBOTERARBEITSPLÄTZEN Um die Effizienz in der Produktion weiter zu erhöhen, wird inten­ Der Schutz von Personen an Mensch-Roboter-Arbeitsplätzen siv daran gearbeitet, die Kooperationsfähigkeit von Mensch und durch den Einsatz neuer (Sensor-)Technologien erfordert passen­ Maschine bzw. Roboter zu verbessern. Ein wichtiger Baustein auf de Simulations- und Analysewerkzeuge in der Planungsphase. dem Weg dahin sind flexible und dynamische Produktions- und Die Entwicklung solcher Werkzeuge speziell zur Auslegung und Arbeitsumgebungen, in denen beide Seiten unmittelbar mitein­ Verifikation von Arbeitsräumen ist ein weiterer Forschungs­ ander arbeiten können. Das Fraunhofer IFF hat zu dem Zweck schwerpunkt des Fraunhofer IFF. So ist es beispielsweise mit eine neuartige und innovative sensorische Lösung für die Arbeits­ Hilfe von virtueller und erweiterter Realität möglich, Arbeits­ raumüberwachung entwickelt, die auf modernster Projektor- und platzsituationen durch Kombination realer und computergene­ Kameratechnik beruht. Das System zeichnet sich durch hohe Si­ rierter Objekte auf einfache Art und Weise nachzustellen. Auf cherheit und Flexibilität, geringe Kosten sowie Unabhängigkeit diesem Weg lassen sich gefährdungsfrei konkrete Bewegungs- von Fremdlicht aus. Im Gegensatz zu bisherigen optischen Syste­ und Schutzräume sichtbar machen und analysieren. men ist es als Warn- oder Schutzfeld für den Menschen sichtbar, wodurch die Transparenz für den Nutzer deutlich erhöht wird. Das Verfahren wurde vom Fraunhofer IFF zum Patent angemel­ det. OPTIMIERTE, DYNAMISCHE GEPLANTE SCHUTZRÄUME Technologie Das neuartige System zur Arbeitsraumüberwachung arbeitet mit Neben der Erforschung neuer Verfahren und Technologien sichtbarem Licht. Die zu überwachenden Risikobereiche werden zur Erfassung von Objekten, wie beispielsweise Personen im direkt in die Umgebung, wie z. B. auf den Fußboden, projiziert Arbeitsraum des Roboters, sind Strategien notwendig, die die und erzeugen so ein optisches Warn- und/oder Schutzfeld. Wer­ optimale Planung von sicherheitskritischen Bereichen in Abhän­ den diese Sicherheitsbereiche durch eine Unterbrechung der Pro­ gigkeit von der aktuellen bzw. bevorstehenden Roboterbewe­ jektionsstrahlen verletzt, erkennen das die umgebenden Kameras gung erlauben. Im Gegensatz zu fest vorgegebenen Sicherheits­ zuverlässig. Für den Nutzer sind damit sowohl die aktiven Sicher­ bereichen ermöglichen erst solche dynamischen Schutzräume heitsbereiche als auch deren Verletzungen jederzeit erkennbar. eine effiziente Nutzung vorhandener Arbeitsräume sowie eine Gleichzeitig können dem Nutzer über die optische Einblendung optimierte Prozessgestaltung. weitere Informationen, wie zum Zustand des Roboters oder Hin­ Die entwickelten automatischen Planungsverfahren für Schutz- weise zu Prozessschritten etc., übermittelt werden. und Warnfelder sind dabei nicht nur abhängig von der Position Schnelle und deterministische Auswertealgorithmen für die De­ und dem konkret folgenden Arbeitsschritt des Roboters, son­ tektion von Verletzungen der Sicherheitsbereiche erlauben Reak­ dern auch von den Fähigkeiten und Einschränkungen der zur tionszeiten, die die Technologie für den Einsatz in zeitkritischen Absicherung eingesetzten Sensorsysteme sowie von eventuellen Anwendungen im Zusammenspiel mit Robotern oder anderen Verdeckungen. Maschinen geradezu prädestiniert. 1