Anleitung - TU Ilmenau
Werbung

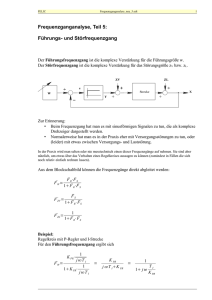
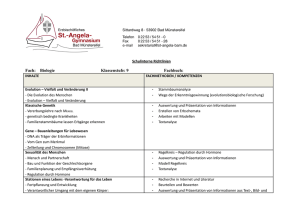
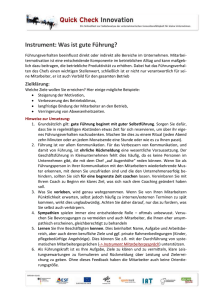
FACHGEBIET SYSTEMANALYSE Praktikum Regelungstechnik / Automatische Steuerung Versuch AS-G 6 „Linearer einschleifiger Regelkreis“ Verantwortlicher Hochschullehrer: Versuchsverantwortlicher: Ausgabe November 2002 Prof. Dr.-Ing. habil. J. Wernstedt Dipl.-Ing. (FH) T. Glotzbach Inhalt Inhalt Inhalt 1 Inhalt 2 1. Versuchsziel 3 2. Aufgaben zur Versuchsvorbereitung 4 2.1. Reglerauslegung ................................................................................................. 4 2.2. Berechnung der bleibenden Regelabweichung................................................... 6 2.3. Korrekturnetzwerke ............................................................................................ 6 3. 2 Versuchsdurchführung 7 3.1. Führungsverhalten des geschlossenen Kreises ................................................... 7 3.1.1. Wirkung der Regler im geschlossenen Kreis.................................................. 7 3.1.2. Wirkung von Korrekturnetzwerken im Regelkreis......................................... 8 3.2. Störverhalten des Regelkreises mit I-Streckenanteil.......................................... 8 1. Versuchsziel Betrachtet wird der lineare einschleifige Regelkreis unter Einwirkung deterministischer aperiodischer Führungs- und Störfunktionen, wobei das Regelkreisverhalten durch den Einsatz unterschiedlicher Reglertypen variiert wird. Experimentell ist der Einfluß der Reglerkennwerte auf die dynamischen und statischen Kenngrößen des Regelgrößenverlaufs bei Einwirkung sprung- und rampenförmiger Führungsgrößen zu ermitteln. Weiterhin werden Störübergangsfunktionen untersucht, wobei der Eintritt der Störung am Ein- oder Ausgang bzw. innerhalb der Strecke erfolgt. Am Beispiel wird der Einfluß von Zeitkonstantenänderungen auf den dynamischen Verlauf der Führungsübergangsfunktion betrachtet. Eine Diskussion der Ergebnisse anhand von Frequenzlinien (Bodediagramm) soll den Zusammenhang zwischen Zeit- und Frequenzbereich verdeutlichen. Es wird eine qualitative Reglerbemessung nach Einstellregeln für vorgegebene Überschwingweiten durchgeführt 3 2. Aufgaben zur Versuchsvorbereitung 2.1. Reglerauslegung Gegeben ist der Regelkreis in Abb. 2.1 mit T1=1 ms; T2=0,5 ms; T3=0,2 ms. W(p) - + 1 K R 1 + pTN 1 (1 + pT1 )(1 + pT2 )(1 + pT3 ) Y(p) Abb. 2.1: Regelkreis a) Berechnen Sie die Reglerparameter so, dass die Führungsübergangsfunktion ein Überschwingen von ∆h=30% aufweist. Wie groß ist dann die Einschwingzeit Tm? Hinweise: Die Nachstellzeit TN des Reglers ist Streckenzeitkonstante kompensiert wird. so einzustellen, dass die größte Für die Überschwingweite bei IT1-Gliedern gilt: ∆h = e −π a 4−a mit a = ω1 ; ωS (1) ω1=Knickpunkt, an dem die Steigung im logarithmischen Amplitudenfrequenzgang (LAF) von –20 dB/Dekade auf –40 dB/Dekade fällt; ωS=Schnittpunkt von LAF und Frequenzachse Bei IT2-Gliedern muss bei Überschwingweiten über 10% ein korrigierter Einstellfaktor ak verwendet werden: [ ( a k = a(∆h ) + E (∆h ) 0,36 1 − e −5b )] (2) mit E (∆h ) = 1 − e [−2,5(1,6−a (∆h ))] Tl +1 , Tl = größte nicht kompensierte Streckenzeitkonstante Tl Für die Gesamtregelverstärkung gilt dann: b= 4 (3) (4) 2.2. Berechnung der bleibenden Regelabweichung K IR = 1 , K S a ( ∆h ) T∑ T∑ =Summenzeitkonstante der Strecke (5) Beim PI-Regler ist zu beachten: K IR = KR TN (6) Für die Einschwingzeit gilt: Tm = π T∑ 4ak 4 − ak (7) b) Zeichnen Sie für a) den logarithmischen Amplitudenfrequenzgang (LAF) der offenen Kette. 5 2. Aufgaben zur Versuchsvorbereitung 2.2. Berechnung der bleibenden Regelabweichung Welche Struktur wird für die Übertragungsfunktion G0 der offenen Kette benötigt, wenn für a) sprungförmige oder b) rampenförmige Führungsgrößen die bleibende Regelabweichung α) eB endlich bzw. β) eB=0 gefordert ist. Zeigen Sie die mathematischen Zusammenhänge. Diskutieren sie die Frage der Stabilität des offenen Kreises. 2.3. Korrekturnetzwerke Für die in Abb. 2.2 dargestellten Korrekturnetzwerke ist für C1=5nF, C2=50nF, R1=R2=100kΩ jeweils die Übertragungsfunktion bestehend aus Grundübertragungsgliedern (Zeitkonstantenform) zu berechnen. Stellen Sie die Übertragungsfunktionen im LAF dar. C1 R1 R1 R2 Ue(t) Ua(t) R2 Ue(t) C2 KNW1 KNW2 C1 R1 R2 Ua(t) Ue(t) C2 KNW3 Abb. 2.2: Korrekturnetzwerke 6 Ua(t) 3.1. Führungsverhalten des geschlossenen Kreises 3. Versuchsdurchführung 3.1. Führungsverhalten des geschlossenen Kreises 3.1.1. Wirkung der Regler im geschlossenen Kreis Die Regelstrecke mit der Übertragungsfunktion GS ( p ) = Y ( p) 1 = U ( p) (1 + p *1ms )(1 + p * 0,5ms )(1 + p * 0,2ms ) (8) gemäß Abb. 2.1 ist nacheinander mit einem • • • P-Regler I-Regler PI-Regler mit TN=1ms zu einem geschlossenen Kreis zusammenzuschalten. Folgende Untersuchungen sind anzustellen: a) Für die Führungsübergangsfunktionen der Regelkreise soll die Forderung von ∆h=30% durch empirisches Einstellen der Reglerkennwerte KR bzw. TN beim I-Regler erfüllt werden. b) Geben Sie die ermittelten Reglerkennwerte und die Gütewerte der Führungsübergangsfunktionen (∆h, Tm, eB) an. Welchen Einfluß haben die Reglerkennwerte auf die Gütewerte? c) Skizzieren Sie die Führungsübergangsfunktionen und diskutieren Sie daran die Vorund Nachteile der eingesetzten Reglertypen. Vergleichen Sie das statische Verhalten der Regelkreise. d) Verändern Sie beim PI-Regler bei konstanter Reglerverstärkung die Nachstellzeit (TN=0,5...1,5ms) und wählen Sie die günstigste Dimensionierung aus. e) Vergleichen Sie die im Experiment ermittelten Reglereinstellungen des PI-Reglers mit den von Ihnen in der Vorbereitung berechneten. 7 3. Versuchsdurchführung 3.1.2. Wirkung von Korrekturnetzwerken im Regelkreis a) Für eine T2-Strecke (T1=5ms, T2=0,5ms) ist das dynamische und statische Verhalten des entsprechenden unkorrigierten Kreises bei sprungförmiger Führungsgröße zu untersuchen. Die auf dem Oszi abgebildete Führungsübergangsfunktion ist zu skizzieren, die folgenden Werte sind zu bestimmen: Überschwingweite ∆h, Einschwingzeit Tm, bleibende Regelabweichung eB. Diese Messungen sind bei Verwendung eines P-Reglers mit KR=5; 10; 20 durchzuführen. Die Ergebnisse sind im LAF zu diskutieren. b) Mit der gleichen Strecke, den passiven Korrekturnetzwerken und KR=20 ist der Kreis aufzubauen. Skizzieren Sie die Übergangsfunktion des Kreises für alle Korrekturnetzwerke. Bestimmen sie ∆h, Tm, eB. Vergleichen Sie diese Werte mit den entsprechenden Werten des unkorrigierten Kreises mit K0=10 und K0=20. Begründen Sie die Veränderungen mit Hilfe des LAF. 3.2. Störverhalten des Regelkreises mit I-Streckenanteil Gegeben ist der in Abb. 3.1 dargestellte Regelkreis. Z3(p) Z2(p) - 1 p *1ms Z1(p) 1 1 + p * 2ms Y(p) KR Abb. 3.1: Kreis mit integrierender Strecke Ermitteln Sie die Werte des statischen Regelfehlers yB, des maximalen Störfehlers ym, des Überschwingens ∆y und der Einschwingzeit Tm, wenn bei einer festen Reglereinstellung (Führungsverhalten mit 30% Überschwingen) die Störung zi(t)=σ(t) (Einheitssprung) an den angegebenen Stellen in den Regelkreis eintritt. Begründen Sie die Ergebnisse. 8