u—nteninform—tion und †ers™hränkung in rel—tivistis™hen ƒzen
Werbung

Quanteninformation und
Verschränkung
in relativistischen Szenarien
Christoph Gohle
München 2001
Quanteninformation und
Verschränkung
in relativistischen Szenarien
Christoph Gohle
Diplomarbeit
Erstgutachter
Prof. Dr. Axel Schenzle
Zweitgutachter
Prof. Dr. Harald Weinfurter
Sektion Physik
LudwigMaximiliansUniversität München
23. April 2001
Inhaltsverzeichnis
1 Einleitung
1
1.1
Relativistische 1-Teilchen Theorie . . . . . . . . . . . . . . . . . .
4
1.2
Elemente der Quanteninformationstheorie
. . . . . . . . . . . . .
5
. . . . . . . . . . . . . . .
9
2 Weltlinien
9
2.1
Die Weltlinie in gekrümmter Raumzeit
2.2
Koordinatensysteme auf Weltlinien
2.1.1
Fermi-Walker-Transport und Drehimpulse
. . . . . . . . .
12
. . . . . . . . . . . . . . . . .
13
3 Quantenmechanik auf Weltlinien
19
3.1
Der Spinzusammenhang
3.2
Pauli-Gleichung auf der Weltlinie
. . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . .
22
19
3.3
Der 'Hilbertraum auf der Weltlinie' . . . . . . . . . . . . . . . . .
27
3.3.1
Formale Beschreibung
. . . . . . . . . . . . . . . . . . . .
28
3.3.2
Mehrere Systeme
. . . . . . . . . . . . . . . . . . . . . . .
32
3.3.3
Unabhängige Systeme
3.3.4
Zustandsreduktion
3.3.5
Systeme mit Wechselwirkung
. . . . . . . . . . . . . . . . . . . .
33
. . . . . . . . . . . . . . . . . . . . . .
34
. . . . . . . . . . . . . . . .
4 Anwendungen und Beispiele
38
45
4.1
EPR-Korrelationen für Spins, Bell-Test . . . . . . . . . . . . . . .
45
4.2
Das Ekert-Protokoll und Parallelisierung
. . . . . . . . . . . . . .
47
4.3
Uhrensynchronisation . . . . . . . . . . . . . . . . . . . . . . . . .
51
4.4
Eekte der Raumzeit . . . . . . . . . . . . . . . . . . . . . . . . .
55
4.4.1
Elektron im Orbit . . . . . . . . . . . . . . . . . . . . . . .
55
4.4.2
Gravitometer
59
. . . . . . . . . . . . . . . . . . . . . . . . .
Literatur
63
Danksagung
65
v
vi
INHALTSVERZEICHNIS
Kapitel 1
Einleitung
In den letzten Jahren ist Quanteninformationstheorie (QIT), die sich mit der
Speicherung, Verarbeitung und Übermittlung von Informationen durch Quantensysteme beschäftigt, zu einem aktiven Forschungsfeld der Physik geworden.
Man hat entdeckt, dass durch die Ausnutztung von Eigenschaften der Quantenmechanik neue Ansätze zur Lösung von bekannten Problemen der Informationsverarbeitung und Übermittlung gefunden werden können. Dazu gehört ein
Algorithmus zur Faktorisierung von Zahlen (Shor 1994), der ezienter ist als alle
bisher bekannten Algorithmen, die superdichte Kodierung (Bennett und Wiesner
1992) oder die verschränkungsbasierte Quantenkryptographie (Ekert 1991), die
es erlaubt, auf einem unsicheren Kommunikationskanal einen geheimen Schlüssel
zur Kodierung und Dekodierung von Nachrichten zu erzeugen. Bei vielen Protokollen der QIT spielt Verschränkung, ein in der klassischen Informationstheorie
unbekanntes Konzept, eine zentrale Rolle.
Abgesehen von den praktischen Vorteilen und neuartigen Anwendungen solcher Protokolle wirft die Quanteninformationstheorie auch ein neues Licht auf die
Grundbegrie der Quantenmechanik. So stützt sich beispielsweise die Quantenkryptographie massiv auf das Postulat der Vollständigkeit der Quantenmechanik,
welches besagt, dass alles was über ein physikalisches System gesagt werden kann
durch die quantenmechanische Beschreibung und deren Regeln ausgedrückt werden kann.
Die Quantenkryptographie steht und fällt mit der Gültigkeit dieses
Postulats.
Ein anderer wichtiger Aspekt ist die Frage nach fehlertoleranten Quantenrechnern, welche die unvermeidlichen Eekte der Dekohärenz ausgleichen können.
In der klassischen Informationstheorie bedient man sich hierzu der Technik der
redundanten Speicherung, welche eektiv auf das Kopieren von Information beruht. Aus der Linearität der Quantenmechanik folgt aber, dass es unmöglich ist
eine exakte Kopie eines unbekannten Zustandes eines Systems zu erzeugen ("nocloning-theorem" von Wooters und Zurek 1982). Da auÿerdem der Zustandsraum
der Quantenmechanik ein linearer Raum ist, sind die möglichen Zustände eines
Quantenrechners kontinuierlich, wodurch er einem Analogrechner ähnelt, der kein
1
2
KAPITEL 1.
erfolgreiches, weil nicht skalierbares Konzept ist.
EINLEITUNG
Andererseits sind die mögli-
chen Ausgänge bei quantenmechanischen Messungen diskret, was dem bewiesenermaÿen fehlertoleranten Digitalrechner nahe steht. Messungen zerstören aber
die Verschränkung, welche während der Ausführung von Programmen benötigt
1
wird, sodass es überraschend war als gezeigt werden konnte , dass fehlertolerantes
Quantenrechnen im Prinzip möglich ist.
Die meisten Protokolle und Schemata der QIT sind in nichtrelativistischen
Szenarien formuliert und setzten deshalb einen a priori Begri von Gleichzeitigkeit und Zeitordnung voraus. Während dies für viele Zwecke ausreicht, berühren
einige Protokolle explizit relativistische Aspekte. Ein Beispiel betrit die Rolle
des No-Cloning-Prinzips in der Diskussion über die (Un-)Möglichkeit von superluminaler Kommunikation, der Übertragung von Information mit Überlichtgeschwindigkeit. In einem Vorschlag von Herbert (1982) zu diesem Thema hatte der
Sender an seinem Teil eines sogenannten EPR-Paares
2
eine Messung vorzuneh-
men, welche eine Nachricht kodierte. Ein idealen Verstärker (Klonier-Maschine)
sollte sodann den, durch die Messung instantan kollabierten Zustand so verstärken, dass die Wahl der Messrichtung auf der Senderseite bestimmt werden konnte.
Neben der Kollision mit dem No-Cloning-Prinzip verwendet das Argument von
Herbert eine implizite zeitliche Ordnung in der gemessen und geklont wird: Zuerst misst der Sender und anschlieÿend klont der Empfänger und vermisst das
Produkt dieser Operation (s. Abbildung 1.1)
Wählt man durch eine Lorentztransformation ein anderes Bezugssystem, in
dem der Empfänger klont (und misst) bevor der Sender seine Messung durchgeführt hat, dann wirkt die Kloniermaschine aus der Sicht dieses Bezugssystems
nicht auf einen reinen Einteilchenzustand, sondern auf ein Teilchen, das mit dem
anderen Teilchen verschränkt ist.
Es ist somit unklar, wie diese hypothetische
Kloniermaschine auf das Teilchen wirken soll. Klont sie den reduzierten Dichte1
operator ( 1) oder wird die Verschränkung mit auf die Klone übertragen?
2
Natürlich sollte eine vernünftige Theorie der Quanteninformation mit der speziellen Relativitätstheorie konsistent sein und die Zeitordnung von raumartig getrennten Ereignissen keine Rolle spielen, was neben der Linearität der Quantenmechanik, einen weiteren Grund liefert, einen idealen Kloner zu verbieten. Hat
man jedoch die Unabhängigkeit der Quanteninformationstheorie von Fragen der
Zeitordnung sichergestellt, so wäre es sehr nützlich wenn man eine Formulierung
der QIT besäÿe, welche kein Koordinatensystem und damit keine Zeitordnungen
auszeichnet. Dies ist ein wesentliches Ziel der vorliegenden Arbeit.
Analysiert man die oben erwähnten EPR-Paare weiter unter relativistischen
Aspekten, so fällt auf, dass eine zentrale Aussage über diese Zustände darin be-
1 s. Calderbank und Shor (1996) oder Steane (1996)
2 So benannt nach der Arbeit von Einstein, Podolski und Rosen (Einstein et al. 1935), wobei
die gebräuchliche Form
(1)
|ψi = |1i
durch Bohm (1951) stammt.
(2)
|0i
(1)
− |0i
(2)
|1i
aus der Neuformulierung des Problems
3
t
N
|10> oder |01>
M
C
{ |1>
|0>
σz{111111...
000000....
σx{10110100...
00010111...
|1> |1> ...
|0> |0> ...
|10>−|01>
t
N
C
|10>−|01>
?
M
t’
x’
EPR
a)
x
EPR
b)
x
Abbildung 1.1: a) Der Sender (M) misst in z-Richtung und projiziert entweder
auf
|10i
falls das Ergebnis seiner Messung 1 ist oder
klont (C) entweder
|0i
oder
|1i.
|01i
für 0. Der Empfänger
Misst er (N) nun die Hälfte der Klone in z-
und die andere Hälfte in x-Richtung, so erhält er entweder korrelierte Ergebnisse
(σz ) oder unkorrelierte ( σx ), sodass er erkennt, dass der Sender in z-Richtung
gemessen hat (ebenso bei x-Messung bei M). b) Das gleiche Bild in einem anderen
Bezugssystem.
steht, dass Messungen des Spins solcher Teilchen in parallelen Richtungen immer
perfekte Antikorrelationen zwischen den Messergebnissen liefern, was zum Beispiel in dem Protokoll von Ekert (1991) zur Quantenkryptographie ausgenutzt
wird.
In der allgemeinen Relativitätstheorie ist es aber aufgrund der Krümmung des
Raumes nicht möglich, parallele Richtungen global zu denieren. Parallelität ist
vielmehr lokal durch ein Wegintegral gegeben, dessen Integrand im Allgemeinen
kein totales Dierential darstellt, sodass der Wert des Integrals also nicht nur von
den Endpunkten des Weges abhängt sondern auch von dem beschrittenen Weg.
Diese Wegabhängigkeit ist gerade ein Maÿ für die Stärke des Gravitationsfeldes.
Nun ist bekanntermaÿen die Bahn eines Teilchens auf Grund der quantenmechanischen Unschärfe kein wohldenierter Begri. Man muss sich also fragen,
in welchem Sinne parallele Richtungen, für quantenmechanische Systeme in einer
gekrümmten Raumzeit deniert werden können, die nötig sind um den Korrelationen in einem EPR-Paar einen Sinn zu geben. Andererseits ist man in der Quanteninformationstheorie primär an lokalisierten Quantensystemen interessiert, die
also im Wesentlichen nur innerhalb eines kleinen Raumbereichs eine nicht verschwindende Wellenfunktion besitzen.
Dies ist so, da man die in dem System
gespeicherten Informationen irgendwann auch wieder auslesen will. Ist das System dann nicht gut lokalisiert, ist die Wahrscheinlichkeit groÿ, das System nicht
4
KAPITEL 1.
EINLEITUNG
in dem Detektor zum Auslesen der Information zu nden und die Information ist
damit mit hoher Wahrscheinlichkeit verloren. Man wird aus diesem Grund das
System unter Betrachtung in einer Falle oder ähnlichen Apparatur aufbewahren,
um die Wellenfunktion des Systems lokalisiert zu halten. Typische Fallengröÿen
in heutigen Anwendungen sind vielleicht ein paar
µm,
maximal aber von der
Gröÿenordnung cm. Sind dann die Gravitationsfelder nicht zu stark, sodass die
Wegabhängigkeit des Transports von Richtungen klein ist, kann man das Wellenpaket im Wesentlichen durch die Weltlinie der Falle ersetzen und den Transport
des Spins bezüglich dieser Weltlinie durchführen. Graphen wie in Abbildung 1.1
sind damit durchaus suggestiv für die relativistische Formulierung solcher Probleme, da sie bereits Weltlinien der Teilsysteme beschreiben können.
1.1 Relativistische 1-Teilchen Theorie
Es ist bekannt, dass eine relativistische 1-Teilchen-Theorie nur in begrenztem Maÿe Sinn macht und man im Prinzip den Apparat der Quantenfeldtheorie benötigt,
um alle speziell relativistischen Aspekte der Quantenmechanik wie zum Beispiel
die Paarerzeugung oder die korrekte Kopplung der geladenen Teilchen an das
elektromagnetische Feld zu beschreiben. Darüber hinaus benötigt man, um alle
Eekte der Wechselwirkung zwischen Materie und Gravitationsfeld beschreiben
zu können, vermutlich eine Quantentheorie der Gravitation, die bis heute noch
nicht befriedigend formuliert werden konnte.
Obwohl es in dieser Arbeit um relativistische Aspekte der Quanteninformationstheorie gehen soll, berührt sie weder die Fragen und Probleme der Quantenfeldtheorie noch der Quantengravitation. Dies liegt daran, dass die Systeme
die in der Quanteninformationstheorie zur Diskussion stehen, wie oben erläutert,
Teilchen in Fallen sind. Diese Systeme sind aufgrund der typischen Fallentiefen
eV ) auf Energien weit unter der Ruheenergie der betrachteten Teilchen
(∼ M eV ) beschränkt, sodass Eekte wie Teilchenerzeugung sicher keine Rolle
(einige
spielen werden. Eventuelle Eekte einer Quantengravitation spielen aus demselben Grund keine Rolle. Die für solche Eekte relevanten Energieskalen (Planckenergie!)
sind viele Gröÿenordnungen von den Energien der hier betrachteten
Systeme entfernt.
Andererseits macht es durchaus Sinn, sich die Möglichkeit
vorzustellen, dass eines Tages Qubits in Form von gefangenen Atomen oder Spinfreiheitsgraden über weite Distanzen, zum Beispiel in Raumsonden, geführt und
kontrolliert werden, sodass Fragen des Transports solcher Freiheitsgrade und der
Parallelität von Richtungen, wie sie oben diskutiert wurden, durchaus relevant
werden.
Bei dieser Fragestellung treen zwei fundamentale Konzepte aufeinander. Einerseits die essentielle Lokalität der Relativitätstheorie, in der alle ein physikalisches System beschreibenden Gröÿen ortsgebunden sind und Wechselwirkungen
nur zwischen benachbarten Punkten der Raumzeit stattnden und andererseits
1.2.
ELEMENTE DER QUANTENINFORMATIONSTHEORIE
5
die Nichtlokalität der Quantenmechanik, die es im Allgemeinen nicht erlaubt,
räumlich separierten Freiheitsgraden, wenn diese in einem verschränkten Zustand
sind, je einen Zustand für sich zuzuordnen der das Gesamtsystem vollständig beschreibt.
Es gibt wenige Arbeiten, die dieses Problem bearbeitet haben.
Ein
Ansatz, der den Eekt von Gravitation auf die Verschränkung untersucht, wird
durch von Borzeszkowski und Mensky (2000) beschrieben. Die dortige Analyse
betrachtet Teilchen mit Spin, die sich frei durch eine Raumzeit mit Gravitation
bewegen und benutzt dazu die Pfadintegraldarstellung der Quantenmechanik. Es
wird dann argumentiert, dass der Hauptbeitrag zu dem Pfadintegral, welches die
Übergangsamplitude zwischen zwei lichtartig entfernten Punkten in der Raumzeit
bestimmt, vom klassischen Pfad, dominiert wird. Dieser ist die Geodäte, welche
diese beiden Punkte verbindet und entlang welcher der Spin parallel transportiert
wird. Andererseits ist ein anfänglich lokalisiertes Wellenpaket mit wohldeniertem Spin nach gewisser Zeit so weit zerlaufen, dass die Kopplung zwischen Spin
und Ort (Transport ist wegabhängig) durch Spuren über den Ortsfreiheitsgrad effektiv eine Spin-Dekohärenz bewirkt. Danach bewirkt das Gravitationsfeld, dass
EPR-Korrelationen in einer gravitativen Umgebung nur eine endliche Reichweite
besitzen.
Diese Analyse ist für die Zwecke der QIT aus zwei Gründen nur be-
dingt nützlich: Erstens hat man es dort mit gefangenen Teilchen zu tun, sodass
ein Zerlaufen der Wellenfunktion nicht stattndet und zweitens bewegen sich die
Teilchen (bzw. Fallen) nicht auf Geodäten durch die Raumzeit, sodass Beschleunigungskräfte berücksichtigt werden müssen. Wir werden deshalb in dieser Arbeit
einen anderen Ansatz zur Bestimmung des Transports untersuchen, der diesen
Gegebenheiten Rechnung trägt.
1.2 Elemente der Quanteninformationstheorie
In der nichtrelativistischen Form der QIT gibt es ein quantenmechanisches System, aufgebaut aus elementaren Zweizustandssystemen (Qubits) und Parteien
(Alice, Bob und Charlie), die mit Hilfe dieses Quantensystems kommunikative
Aufgaben lösen wollen. Das Quantensystem ist zwischen den Parteien aufgeteilt,
sodass der Zustandsraum in zu den Parteien gehörende Teile zerfällt
H = HAlice ⊗ HBob ⊗ . . .
(1.1)
die jeweils lokal durch die Parteien mit fundamentalen Operationen wie Präparation, Messung und unitäre Transformationen manipuliert werden können. Dabei
bedeutet lokal, dass die Operationen einer Partei nur lineare Abbildungen auf
dem ihr zugeordneten Teilraum
3
einschlieÿen. Es können Teilsystem ausgetauscht
werden, sodass danach die Zerlegung des Zustandsraumes und damit die Klasse
der lokalen Operationen abgewandelt werden.
Besteht zum Beispiel zu einem
3 bzw. auf dem Raum der auf diesem Teilraum denierten Dichteoperatoren
6
KAPITEL 1.
EINLEITUNG
Zeitpunkt der Teil des Systems, zu dem Alice Zugang besitzt, aus zwei Qubits
HAlice = C2 ⊗ C2 , und sendet sie dann ein Teilchen an Bob, so ist anschlieÿend
die Aufteilung des Zustandsraumes und damit die Klasse der lokalen Operatio0
2
0
2
nen durch HAlice = C und HBob = C ⊗ HBob gegeben. Auÿerdem besitzen die
Parteien die Möglichkeit auf klassischem Wege miteinander zu kommunizieren
und sich so über ihre Aktionen und Messergebnisse zu informieren. Für dieses
Standardszenario der QIT wird häug der Begri LOCC (local operations and
classical communication) verwendet.
Dieses Schema soll in der vorliegenden Arbeit auf eine Form gebracht werden
die es ermöglicht, relativistische Aspekte der QIT zu analysieren.
Wir hatten
in den vorhergehenden Abschnitten bemerkt, dass das Versenden von Systemen
nicht unabhängig davon ist, auf welchen Wegen sich diese Systeme bewegen. Aus
diesem Grund soll jedem elementaren Quantensystem eine Weltlinie zugeordnet
werden, auf der sich das System bewegen soll. Realistisch betrachtet kann diese Weltlinie durch das Zentrum der Falle gegeben sein, in der sich das Qubit
bendet. Um die Dynamik dieses Systems zu bestimmen, verwendet man eine
Schrödingergleichung, die als Zeitparameter den einzigen relativistisch invarianten Parameter auf der Weltlinie, die Eigenzeit, verwendet. Zeichnet ein solches
fundamentales System z.B. durch einen Eigendrehimpuls (Spin) eine Richtung im
Raum aus, so muss man auf der Bahn noch ein Koordinatensystem zur Benennung dieser Richtungen (ein lokales Vierbein ) einführen. Diese Idee führt zu dem
Konzept des Hilbertraumes auf der Weltlinie, einer Art Faserbündel, das aus
dem (mengentheoretischen) Produkt aus Bahn und Zustandsraum besteht, sodass
zu jedem Punkt auf der Weltlinie ein Zustandsraum gehört und die Kinematik
des Systems durch einen stetigen Schnitt durch dieses Faserbündel gegeben ist.
Die Schrödingergleichung bestimmt, wie dieser Schnitt durch das Faserbündel zu
4
laufen hat .
Die Parteien bewegen sich ebenfalls auf Weltlinie durch die Raumzeit.
Be-
ndet sich ein Teilsystem bei einer Partei, fallen also die Weltlinien der Partei
und des Teilsystems zeitweise zusammen, so kann die Partei dieses Teilsystem
lokal manipulieren, also jede gewünschte Art von Operation (Messung, unitäre
Transformation) nur an diesem Teilsystem vornehmen. Die klassische Kommunikation ndet innerhalb des zukünftigen Lichtkegels statt. Unternimmt eine Partei
nur an einem Raumzeitpunkt ein Aktion (Quantenoperation/Kommunikation) so
spielt die Weltlinie dieser Partei keine Rolle und kann durch das Ereignis auf der
Weltlinie des entsprechenden Teilsystems ersetzt werden.
Die Idee eines Qubits auf der Bahn bedarf natürlich einer dynamischen Rechtfertigung. Man stellt sich dazu am besten ein Atom vor, welches in einer Falle in
den Grundzustand gekühlt gefangen ist. Das Qubit ist ein Paar von Zuständen
dieses Atoms, die möglichst von der Schwerpunktsbewegung in der Falle separieren, sodass keine oder nur eine schwache Kopplung zwischen diesen Freiheitsgra-
4 Die Details werden in Abschnitt 3.3 ausgeführt.
1.2.
ELEMENTE DER QUANTENINFORMATIONSTHEORIE
7
den existiert. Bewegt sich diese Falle auf einer Weltlinie durch die Raumzeit, so
wird das System im Allgemeinen sowohl Beschleunigungs- als auch Gravitationskräfte spüren. Diese zeitabhängigen Kräfte wirken hauptsächlich auf die Schwerpunktsbewegung und erzeugen dort Anregungen im Fallenpotential.
Nachdem
man über den Schwerpunktsfreiheitsgrad gespurt hat, bleibt die relativ starre
Dynamik der inneren Struktur des Atoms.
Die Gravitations- und Beschleuni-
gungskräfte äuÿern sich dann nur noch durch Dekohärenz (durch die schwache
Kopplung an die weggespurte Schwerpunktsbewegung).
Um diese Sichtweise zu etablieren, muss man den Einuss von Gravitationskräften und Beschleunigung auf ein atomares System genauer untersuchen. Zu
diesem Zweck werden in Kapitel 2 zunächst ein paar Grundbegrie der Relativitätstheorie wiederholt und das Transportgesetz für Drehimpulse motiviert, um
anschlieÿend eine Weltlinien angepasste Beschreibung der Raumzeit durch FermiKoordinaten vorzustellen. Das Kapitel 3 erklärt in einem einführenden Abschnitt
die kovariante Ableitung für Teilchen beliebigen Spins, um darauf aufbauend die
allgemein relativistische Dirac-Gleichung vor zu stellen und ein nichtrelativistischer Grenzfall dieser für Bewegungen auf gegebenen Bahnen zu zeigen. In Abschnitt 3.3 wird eine formale Beschreibung von relativistischen QIT-Szenarien
eingeführt.
Im letzten Kapitel werden ein paar Beispiele zur Anwendung der in dieser Arbeit entwickelten Konzepte vorgestellt. Dies ist ein Protokoll zur Parallelisierung
von Bezugssystemen, und deren Anwendung im Ekert-Protokoll, eine Diskussion
der Uhrensynchronisation mittels EPR-Paaren und die Berechnung des Einusses
von Gravitationsfeldern auf Drehimpulse (insbesondere Spin-1/2).
8
KAPITEL 1.
EINLEITUNG
Kapitel 2
Weltlinien
In diesem Kapitel sollen einige Fakten und Notationen aus der allgemeinen Relativitätstheorie wiederholt und die Kinematik auf Weltlinien eingeführt werden. Der
Abschnitt 2.1 beschäftigt sich mit der Beschreibung von Weltlinien und Vektorgröÿen auf diesen. Auÿerdem wird der Transport von Drehimpulsen auf beschleunigten Weltlinien diskutiert. Im Abschnitt 2.2 werden die Fermi-Koordinaten, ein
Weltlinien angepasstes Koordinatensystem in der Raumzeit, eingeführt.
2.1 Die Weltlinie in gekrümmter Raumzeit
Sei
M
eine vierdimensionale Mannigfaltigkeit und
Metrik mit Signatur
(−1, 1, 1, 1).
Anders gesagt,
M
g
eine pseudo-riemannsche
ist die Raumzeit und man
wählt für zeitartige Vektoren negative Norm. Dann ist eine Weltlinie durch diese
1
Raumzeit eine Abbildung γ : R 7→ M stückweise C (einmal stetig dierenzierdγ
= u deniert ist, g(u, u) = −1 gilt1 . Wenn keine Verbar), sodass überall, wo
dτ
wechslung zu befürchten ist, wird im Folgenden auch manchmal X · Y ≡ g(X, Y)
für das Skalarprodukt geschrieben.
Ist an diese Weltlinie nun ein dynamisches System geheftet, ist also zum Beispiel
γ(τ )
die Weltlinie des Schwerpunktes eines klassischen Systems von Mas-
senpunkten oder das Zentrum einer Paulfalle, in der sich ein Atom bendet, so
gibt es unter Umständen weitere Vektoren oder Tensoren, abgesehen von der Geschwindigkeit, der Beschleunigung
1 d.h.
τ
a = ∇u u ≡ u̇
ist die Eigenzeit auf der Weltlinie
9
und höheren Ableitungen der
10
KAPITEL 2.
WELTLINIEN
2
Weltlinie , die an diese Weltlinie geheftet sind. Für einen Kreisel gibt es zum
µν
Beispiel den Drehimpuls-Tensor J , der später eingeführt wird. Um solche Gröÿen und deren zeitliche Entwicklung unabhängig von einem Koordinatensystem
in der Raumzeit zu beschreiben, bedient man sich entweder koordinatenfreier
∇u u = a
Formen der Bewegungsgleichungen wie zum Beispiel
oder man führt
auf der Weltlinie eine Basis des Tangentialraumes ein. Diese Basis kann auf zunächst beliebig gewählt werden und ist insbesondere unabhängig von einer Wahl
von Koordinaten in einer Umgebung der Raumzeit. Eine solche Basis nennt man
ein Vierbein. Jeder Tensor, der auf der Weltlinie deniert ist, kann dann dort in
dieser Basis ausgedrückt werden. Dies scheint im ersten Moment vielleicht überüssig zu sein, wenn man doch eine koordinatenfreie Schreibweise hat, die kein
Bezugssystem auszeichnet. Später wird jedoch ein nichtrelativistischen Limes benötigt, wozu ein Bezugssystem ausgezeichnet werden muss. Auÿerdem benötigt
man genau eine solche Basis, um der Wellenfunktion eines Teilchens mit Spin
einen invarianten Sinn zu geben, wie in Abschnitt3.1 erklärt wird.
Wenn man nun eine Basis
nα
3
einführt , ist es sicherlich geschickt, dabei auf
die Eigenschaften der Metrik Rücksicht zu nehmen und die Basis orthonormal zu
wählen, sodass
g(nα , nβ ) = ηαβ
gilt, wobei
ηαβ
(2.1)
die normale Minkowskimetrik mit obiger Vorzeichenkonvention
darstellt. Es gibt jedoch auf der Weltlinie noch weitere natürliche Forderungen,
die man an das Vierbein
nα
stellen kann. Zum einen gibt es einen natürlichen
normierten und zeitartigen Vektor auf der Weltlinie, die Geschwindigkeit
u,
die
2 ∇ bezeichnet die gewöhnliche kovariante Ableitung der allgemeinen Relativitätstheorie, die
über die Eigenschaften
∇X g(Y, Z) = g(∇X Y, Z) + g(Y, ∇X Z),
T(X, Y) = ∇X Y − ∇Y X − [X, Y] = 0
und linearität deniert ist und die in Koordinaten
∇Y X = Y µ (
wenn
Yµ
und
Xµ
die Komponenten von
in Klammern wird oft auch als
X ν ;µ
xµ
gegeben ist durch
∂X ν
∂
+ Γνµδ X δ ) ν
∂xµ
∂x
X
und
Y
bzgl.
geschrieben, sodass
drücken sich die denierenden Eigenschaften von
gµν;γ = 0,
∇
der Basis
(∇Y X)ν =
∂
∂xµ sind. Der Ausdruck
Y µ X ν ;µ . In Koordinaten
folgendermaÿen aus
Γµνδ = Γµδν .
3 Beachte: Der Index unterscheidet keine Komponente sondern Basisvektoren. Man kann
Vektoren in der Raumzeit nun bezüglich der Koordinatenbasis
Basis darstellen.
∂
∂xµ oder bezüglich der Vierbein-
Diese beiden Möglichkeiten weden unterschieden indem Komponenten be-
züglich der Vierbein-Basis mit Indizes vom Anfang des Alphabets (
α, β, γ, . . . , a, b, c, . . .)
und Komponenten der Koordinatenbasis mit Indizes aus dem hinteren Teil des Alphabets
(µ, ν, . . . , i, j, k, . . .) gekennzeichnet werden. Generell laufen griechische Indizes wie üblich von
0
bis
3
und lateinische von
1
bis
3.
2.1.
11
DIE WELTLINIE IN GEKRÜMMTER RAUMZEIT
sich als
n0 anbietet, was bedeutet, dass man ein lokales Ruhesystem benutzt.
An-
dererseits kann man fordern, dass die Basisvektoren entlang der Weltlinie parallel
transportiert werden und damit
∇u n0α = 0 ∀α
(2.2)
gilt, was das begleitende Vierbein bis auf einen Anfangswert
nα (0)
vollständig
bestimmt. Leider ist im Allgemeinen diese einfache Wahl eines Vierbeines nicht
mit
u = n0
kompatibel, da ja
∇u u = a 6= 0
gilt. Dass die Forderungen (2.1) und
(2.2) nicht miteinander kollidieren, sieht man durch die Identität
0=
d
ηαβ = ∇u g(nα , nβ ) = g(∇u nα , nβ ) + g(nα , ∇u nβ ) = 0.
dτ
(2.3)
Es gibt allerdings auch die Möglichkeit, einen Kompromiss zwischen einem Vier0
bein n α , welches die Bedingung (2.2) erfüllt, und einem Ruhesystem nα mit
n0 = u
zu nden. Dazu bemerkt man, dass die beiden Vierbeine, da sie beide
orthonormal sind, durch eine ortsabhängige Lorentztransformation in Beziehung
stehen
nα = Λα β n0 β
und damit für die kovariante Ableitung von
nα
(2.4)
unter Verwendung von (2.2) gilt
∇u nα = (∇u Λα β )n0 β ≡ Ωα β n0 β
wobei
ist.
~a
∇u Λα β = d/dτ Λα β
(2.5)
die gewöhnliche Richtungsableitung auf der Weltlinie
Ωαβ ist bekanntlich antisymmetrisch und kann deshalb durch zwei 3-Vektoren
ω
~ charakterisiert werden
und
Ω0a = aa ,
sodass
Ωab = abc ω c ,
~a den Schubanteil parametrisiert und ω
~ die räumlichen Rotationen.
(2.6)
Wählt
man das parallele Vierbein an einem beliebigen Punkt identisch mit dem Vierbein
nα
und wertet Gleichung (2.5) an dieser Stelle aus, so erhält man
a = ∇ u u = ∇ u n0 = Ω 0 a na
∇ u na = Ω a β nβ
(2.7)
(2.8)
und Koezientenvergleich mit (2.6) liefert nach einfacher Rechnung
∇u nα = u(a · nα ) − a(u · nα ) + 0αbc ωb nc ,
woraus man sieht, dass die Schubkomponenten von
n0 = u vollständig xiert werden. Wählt
0, sodass sich anschaulich gesprochen das
(2.9)
Ω schon durch die Bedingung
ω
~ =
man nun der Einfachheit halber
Vierbein nicht dreht sondern nur die
12
KAPITEL 2.
WELTLINIEN
nötigen Schübe mitmacht, um immer ein Ruhesystem zu bleiben, so nennt man es
Fermi-Walker-parallel. Allgemeiner nennt man jeden Vektor, der die Gleichung
∇u X = u(a · X) − a(u · X)
erfüllt, Fermi-Walker-parallel entlang der Richtung
u.
(2.10)
Umgekehrt bedeutet Fermi-
Walker-Transport entsprechend, dass man ausgehend von einem Anfangsvektor
an einem Punkt
p
auf der Weltlinie
γ
entlang dieser ein Vektorfeld konstruiert,
welches die Gleichung (2.10) erfüllt. Der dadurch entstehende Vektor am Punkt
q
der Weltlinie heiÿt von
2.1.1
p
nach
q
entlang
γ
Fermi-Walker transportiert.
Fermi-Walker-Transport und Drehimpulse
Die Relevanz des Fermi-Walker-Transports wird klar, wenn man sich fragt, nach
welchem Gesetz sich ein drehmomentfrei gelagerter Kreisel beschleunigt durch die
Raumzeit bewegt. Um diese Frage klären zu können, muss zunächst der Drehimpuls relativistisch deniert werden. Sei also ein System mit Energieimpulstensor
T
gegeben, für den per Denition
T µν ;ν = 0
(2.11)
gilt, so kann man im Minkowskiraum, oder, für ein ausreichend lokalisiertes System, auch in einer gekrümmte Raumzeit, den Drehimpulstensor
J
denieren wobei
µν
=
Z
dΣδ (xµ T νδ − xν T µδ )
(2.12)
dΣ ein raumartiges Flächenelement ist. J µν
ist dann eine Erhal-
tungsgröÿe, die jedoch nicht unabhängig vom Koordinatensystem ist. Um eine
nur für das System charakteristische Gröÿe zu erhalten, die keine unnötigen Koordinatenartefakte mehr enthält, welche (wie in der klassischen Mechanik) aus
der Schwerpunktsbewegung
uµ = P µ /(P ν Pν )1/2
stammen, wobei
Pµ =
folgende Denition
R
dΣδ (T µδ )
(2.13)
der Energie-Impuls-Vektor ist, macht man die
Sµ ≡ µνστ J νσ uτ ,
wobei
der total antisymmetrische Einheitstensor ist, also
(2.14)
Sµ
die Komponenten
eines Pseudovektors. Nun gilt in einem Schwerpunktsystem, das heisst in einem
R 3 00 i
R
Koordinatensystem, in dem
d xT x = 0 und d3 xT i0 = 0 gilt, die Gleichung
1
J µν = µνστ Sσ uτ ,
2
was bedeutet, dass
S
(2.15)
der Drehimpuls des Systems bzgl. des Schwerpunktes, also
der Eigendrehimpuls, ist. Auÿerdem kann man nachrechnen, dass
S
unabhängig
2.2.
13
KOORDINATENSYSTEME AUF WELTLINIEN
von der Wahl des Ursprungs des Minkowski-Koordinatensystems ist.
Dies ist
folglich die relevante Gröÿe, die man einem Kreisel zuordnen wird. Um zu verstehen, wie sich ein drehmomentfreier Kreisel auf einer beschleunigten Weltlinie
bewegt, ist es zunächst nützlich festzustellen, dass
Sµ u µ = 0
(2.16)
gilt, der Eigendrehimpuls also senkrecht auf der Schwerpunktsgeschwindigkeit
steht.
Dies gilt auch, wenn die Weltlinie des Schwerpunktes beschleunigt ist,
sodass gelten muss
0 = ∇u (S · u) = (∇u S) · u + S · (∇u u).
(2.17)
Die Forderung eines kräftefreien Kreisels lässt sich physikalisch durch die Eigenschaft ausdrücken, dass sich die räumlichen Komponenten des DrehimpulsVektors bezüglich des lokalen Ruhesystems zeitlich nicht ändern dürfen bzw. dass
die einzige Richtung, in der sich etwas ändern darf die Zeitrichtung ist:
dS
= ∇u S = cu,
dτ
wobei
c
(2.18)
nun zunächst eine beliebige reelle Funktion auf der Weltlinie sein kann.
Setzt man Gleichung (2.18) in die Gleichung (2.17) ein so erhält man
c = (S · a)
und damit
∇u S = (S · a)u
(2.19)
was die Bewegungsgleichung für die Bewegung des Drehimpulses eines drehmomentfrei auf der Weltlinie bewegten Kreisels ist. Dies ist aber genau die Gleichung
für Fermi-Walker-Transport (2.10), wenn
X
senkrecht auf
u
steht und somit der
erste Term verschwindet. Der Drehimpuls eines drehmomentfrei gelagerten Kreisels wird also Fermi-Walker-transportiert.
Ein anderer und vielleicht intuitiverer Zugang zum Fermi-Walker-Transport
ist die Sichtweise, dass das System von einer Folge innitesimaler, reiner und
aktiver Schübe auf der Weltlinie gehalten wird, wobei ein reiner Schub dadurch
deniert wird, dass im lokalen Ruhesystem die räumlichen Komponenten der
Vektoren, die senkrecht auf der Schubrichtung stehen, unverändert bleiben und
die räumliche Komponente in Schubrichtung die Längenkontraktion erfährt. Diese Sichtweise macht im ersten Moment nur für den Minkowskiraum Sinn, da nur
dort eine Lorentztransformation der Koordinaten des Systems eine invariante Bedeutung hat. Führt man jedoch wie im vorherigen Abschnitt auf der Weltlinie
ein paralleles Vierbein ein, so ist klar, was dieser Schub lokal bedeutet.
2.2 Koordinatensysteme auf Weltlinien
Da quantenmechanische Systeme nicht punktförmig sind sondern eine endliche
Ausdehnung besitzen, ist es nötig, um das relativistische Äquivalenzprinzip anwenden zu können, ein dem Minkowskiraum möglichst nahes Koordinatensystem
14
KAPITEL 2.
in der Umgebung der Weltlinie einzuführen.
WELTLINIEN
Als Ausgangspunkt dazu soll ein
Fermi-Walker paralleles Vierbein auf der Weltlinie mit der Zeitachse tangential
zur Weltlinie dienen. Dieses Vierbein entspricht den Richtungen, die ein auf der
Weltlinie beschleunigter Beobachter als Koordinatenrichtungen verwenden würde.
Deshalb soll ein Koordinatensystem in einer Umgebung der Weltlinie kon∂
gerade
∂xµ
die Vierbein-Richtungen nµ besitzt.
struiert werden, welches auf der Weltlinie als Koordinatenrichtungen
Eine bekannte und übliche Konstruktion die diese Bedingung erfüllt, und
welche zudem in der Nähe der Weltlinie minkowskiartig ist insofern, als auf
der Weltlinie die räumlichen Christoelsymbole verschwinden, sind die Fermi-
4
Koordinaten , die hier kurz beschrieben werden sollen. Das Ziel ist es, ein möglichst gerades Koordinatennetz in der Umgebung der Weltlinie aufzuspannen. Die
Zeitkoordinate ist dabei die Eigenzeit
t
auf der Weltlinie, welche den Anfangs-
punkt oder Ursprung der räumlichen Koordinaten als Punkt auf der Weltlinie
identiziert. Ausgehend von diesem Punkt γ(t) konstruiert man nun in jede
a
a
Richtung x na eine raumartige Geodäte, wobei x xa = 1 ist und ordnet jedem
Punkt
p
auf einer solchen Geodäten die Koordinaten
dätischen Abstand des Punktes
p
vom Punkt
γ(t)
(t, s~x)
zu, wobei
s
den geo-
der Weltlinie bezeichnet.
Diese Konstruktion liefert im Allgemeinen kein Koordinatensystem, welches
sich über den gesamten Raum erstreckt, da die so konstruierten Geodäten sich
auch schneiden können und das Koordinatensystem an solchen Punkten singulär wird.
Beschränkt man sich jedoch auf eine geeignete Umgebung der Welt-
linie, so ist das entstehende Koordinatensystem wohldeniert.
Wie groÿ diese
Umgebung werden kann, hängt einerseits von der Gröÿe der Beschleunigung
auf der Weltlinie und andererseits von der Krümmung des Raumes ab.
a
Für
das Beispiel einer konstant beschleunigten Weltlinie im achen Raum werden
die Fermi-Koordinaten bei (t, −~
a/a2 ) also im Abstand s = |a|−1 in negativer Beschleunigungsrichtung singulär und der Bereich, der durch die Fermi-Koordinaten
überdeckt wird, wird mit zunehmender Beschleunigung immer kleiner.
Wie sieht nun in diesen Koordinaten die Metrik des Raumes aus?
Auf der
Weltlinie stimmen die Koordinatenrichtungen oensichtlich mit dem ursprünglichen Vierbein überein, sodass der metrische Tensor auf der Weltlinie die Komponenten
gµν |(t,0) = ηµν
(2.20)
besitzt. Um den Einuss der Bahnbeschleunigung und der Raumkrümmung abschätzen zu können, wird die Metrik in eine Taylorreihe
gµν |(t,~x) = ηµν + gµν,i |(t,0) xi +
1
gµν,ij |(t,0) xi xj + o(~x3 )
2
(2.21)
um die Weltlinie herum entwickelt. Aufgrund der Konstruktion der Koordinaten
wissen wir, dass die Kurven
g(s) = (t, s~x)
mit konstantem
der Raumzeit sind, für die per Denition gilt
4 siehe dazu zum Beispiel Fermi (1922) oder Levi-Cevita (1927)
t
und
~x
Geodäten in
2.2.
15
KOORDINATENSYSTEME AUF WELTLINIEN
γ
n0
n2
n1
(t,0)
Abbildung 2.1: Die Konstruktion der Fermi-Koordinaten. Die Weltlinie ist fett,
das Vierbein ist durchgezogen. Die gestrichelten Linie sind die räumlichen Koordinatenlinien zur Zeit t. Alle räumlichen Koordinatenlinien, die den Punkt (t,0)
schneiden sind Geodäten.
0 = ∇ġ ġ =
ν
δ
d2 g µ
µ dg dg
+
Γ
= 0 + Γµij xi xj .
νδ
ds2
ds ds
(2.22)
s=0
weshalb Γ
Auf der Weltlinie, um die wir das Koordinatensystem konstruiert haben, gilt
und
g
bezeichnet deshalb unabhängig von
an diesem Punkt unabhängig von
~x
ist.
~x
immer denselben Punkt,
Daraus kann man schlieÿen, dass die
Christoelsymbole auf der Weltlinie verschwinden
5
Γµij (τ,0) = 0.
Für die restlichen Christoelsymbole
Γµ0ν
Γµ0ν
(2.23)
gilt aufgrund deren Denition
∂
∂
= ∇ ∂ 0 ν = ∇u nν = aδν0 + u(a · nν )
µ
∂x ∂x
∂x
(2.24)
und damit
Γµ0ν = aµ δν0 + δ0µ aν
(2.25)
, sodass für die räumlichen Ableitungen der Metrik
gµν,i |(t,0) = Γµνi |(t,0) + Γνµi |(t,0) = −2(δµ0 δν0 ai )
(2.26)
gilt. Um die zweiten Ableitungen der Metrik zu bestimmen und auf die fundamentale Gröÿe der Geometrie, den Krümmungstensor, zurückzuführen, bedient
5 Tatsächlich kann man aus dieser Bedingung nur schlieÿen, dass der symmetrische Anteil
von
Γij
verschwindet. Da aber nach Voraussetzung der Raum torsionsfrei ist, gibt es keinen
antisymmetrischen Anteil und die räumlichen Christoelsymbole verschwinden identisch.
16
KAPITEL 2.
WELTLINIEN
man sich des Satzes über die geodätische Abweichung, der hier kurz angegeben
werden soll. Sei
f (s, n)
ein Geodätenbündel, d.h. eine durch
s
und
n
parametri-
sierte zweidimensionale Untermannigfaltigkeit, für die gilt
∇ df
ds
df
= 0,
ds
(2.27)
n=
so gilt unter Berücksichtigung der Tatsache, dass die Basisvektorfelder
df
und s =
dieser Untermannigfaltigkeit vertauschen
ds
df
dn
[s, n] = 0
(2.28)
R(X, Y)Z ≡ ∇X ∇Y − ∇Y ∇X − ∇[X,Y] Z,
(2.29)
D2
n ≡ (∇s )2 n = ∇s ∇n s = R (s, n) s,
ds2
(2.30)
und der Denition der Krümmung
6
die Gleichung
wobei bei dem zweiten Gleichheitszeichen das Verschwinden der Torsion
im letzten Schritt die Gleichung (2.27) benutzt wurde.
T
und
Auf der Weltlinie sind
die Christoelsymbole bekannt und durch die Gleichungen (2.23,2.25) gegeben,
woraus man für die Zeitableitungen
Γµij,0 (t,0) = 0,
Γµ0ν,0 (t,0) = ȧµ δν0 + δ0µ ȧν
(2.31)
erhält. Des weiteren kann man aus den Identitäten (2.25,2.23,2.31) und der Denition der Riemann-Krümmung (2.29) die folgenden Christoelsymbole bestimmen
µ Γµj0,k (t,0) = − Rj0k
− δ0µ aj ak
(t,0)
µ
|(t,0) + ȧµ δν0 + δ0µ ȧν + ai ai δ0µ δν0 + aµ aν .
Γµ00,ν (t,0) = − R00ν
Die noch fehlenden Ableitungen
Γµjk,l
(2.32)
kann man aus der Gleichung der geodäti-
schen Abweichung berechnen, indem man das von den drei Parametern
~x abhän-
gende Geodätenbündel
f (s, xi ) = (t, s~x)
(2.33)
6 Man beachte, daÿ die Konvention für die Komponenten des Riemanntensors (vielleicht
verwirrend) eine andere Reihenfolge hat, als die Argumente in dem gegebenen Ausdruck
R(
∂
∂
∂
∂
, ν ) κ = Rσ κµν σ
µ
∂x ∂x ∂x
∂x
2.2.
17
KOORDINATENSYSTEME AUF WELTLINIEN
betrachtet und entsprechend die Gleichung (2.30) der geodätische Abweichung für
∂f
die drei Vektoren mi =
= sδiµ ∂x∂ µ bestimmt, diese auf der Weltlinie auswertet
∂xi
und berücksichtigt, dass s = ∂s f = (0, ~
x) ist. Man erhält so nach etwas Rechnung
1
µ
µ
Γµij,k (t,0) = − Rijk
+ Rjik
.
(t,0)
3
(2.34)
Damit kennt man jetzt alle Ableitungen der Christoelsymbole auf der Weltlinie und kann damit nach etwas aufwendiger aber weniger schwieriger Algebra die
zweiten Ableitungen der Metrik bestimmen, sodass die Entwicklung (2.21), wie
bei Ni und Zimmermann (1978) gezeigt, ausgeschrieben bis zur zweiten Ordnung
in den räumlichen Koordinaten die Form
g00 |(t,~x) = −(1 + ~a · ~x)2 − R0k0l |(t,0) xk xl + o(x3 )
2
g0i |(t,~x) = − R0kil |(t,0) xk xl + o(x3 )
3
1
gij |(t,~x) = δij − Rikjl |(t,0) xk xl + o(x3 )
3
7
annimmt , wobei
~a
(2.35)
die räumlichen Komponenten der Beschleunigung auf der
Weltlinie sind (die 0-Komponente verschwindet in diesen Koordinaten). Die einzige Korrektur erster Ordnung rührt von der Beschleunigung auf der Weltlinie
und macht einen Beitrag auf die
g00 -Komponente
der Metrik. Für Systeme mit
geringer Ausdehnung ist damit der einzige von der Minkowskimetrik abweichende
Beitrag die Inertialkraft, die aus der Beschleunigung der Weltlinie stammt.
Bei Ni und Zimmermann (1978) werden auch Grenzen angegeben, in denen
die obige Näherung Gültigkeit besitzt. Sie lauten
s min
(
1
1
, µ 1/2 ,
|a| |Rνκσ |
µ
|Rνκσ
|
µ
|Rνκσ,γ |
)
,
(2.36)
was in dieser Reihenfolge sicherstellt, dass sich die von der Weltlinie ausgehenden
Geodäten nicht kreuzen, sich die vom gleichen Punkt ausgehenden Geodäten
nicht kreuzen und die Krümmung nicht zu stark von ihrem Wert auf der Weltlinie
abweicht.
Die Komponenten eines möglichen Vierbeines auÿerhalb der Weltlinie lauten
n00 (t,~x)
nj0 (t,~x)
1 0 = 1 + ai x − Rk0l xk xl
2
(t,0)
1 j = − Rk0l (t,0) xk xl
3
i
7 Man beachte, daÿ in dieser Arbeit ein anderes Vorzeichen für den Krümmungstensor verwendet wird.
18
KAPITEL 2.
n0i (t,~
x)
nji (t,~x)
1 0 = − Rkil xk xl
3
(t,0)
1 i j
xk xl ,
= δi − Rkjl 6
WELTLINIEN
(2.37)
(t,0)
wobei die Orthonormalitätsrelationen in diesem Fall konsistent bis zur zweiten
Ordnung in
~x
erfüllt werden.
Die Komponenten dieses Vierbeines werden spä-
ter noch einmal benötigt werden und sind hier nur der Vollständigkeit halber
angegeben.
Kapitel 3
Quantenmechanik auf Weltlinien
Nachdem die Kinematik auf Weltlinien zur Verfügung steht, werden wir im nächsten Schritt die Quantenmechanik eines Systems auf einer solchen Weltlinie untersuchen. Die Idee besteht darin, für lokalisierte Quanten-Systeme die relativistischen Bewegungsgleichungen in Fermi-Koordinaten auszudrücken, und dadurch
einen nichtrelativistischen Limes derselben zu erhalten.
Dies wird am Beispiel
des Dirac-Elektrons durchgeführt werden, für das man dann eine Pauligleichung
auf der Weltlinie mit den entsprechenden Korrekturen aus Bahnbeschleunigung
und Raumkrümmung erhält.
Einführend hierzu wird die kovariante Ableitung
für Spins motiviert und explizit bestimmt und in Abschnitt 3.3 wird dann eine
formale Beschreibung von Systemen auf Weltlinien eingeführt.
3.1 Der Spinzusammenhang
Die Lorentzgruppe SO (1, 3) und die Spinorgruppe SO (2, C) sind lokal isomorph,
was bedeutet, dass es für eine Umgebung
U
der Identität in der Lorentzgruppe
V der 1 der Spinorgruppe eine bijektive
D : U 7→ V = D(U ) gibt, welche die Gruppenstruktur
und einer entsprechenden Umgebung
dierenzierbare Abbildung
erhält
D(1) =
1,
D(gh) = D(g)D(h).
(3.1)
Dies drückt man gewöhnlich durch die Forderung aus, dass es für eine bestimmte
Spindarstellung eine Basis von Generatoren
Σαβ
gibt, die die folgende Algebra
erfüllen
[Σαβ , Σγδ ] = Σαδ ηβγ − Σαγ ηβδ − Σβδ ηαγ + Σβγ ηαδ ,
(3.2)
wobei die Indizes nicht die Einträge einer Matrix kennzeichnen sondern verschiedene Elemente aus der Algebra unterscheiden. In diesem Fall lässt sich der zu
dem lokalen Gruppenhomomorphismus gehörige Lie-Algebra-Homomorphismus
folgendermaÿen schreiben
D̃(ω) = ω αβ Σαβ .
19
(3.3)
20
KAPITEL 3.
QUANTENMECHANIK AUF WELTLINIEN
Führt man eine innitesimale Lorentztransformation im Minkowskiraum durch,
so transformiert sich der Spinor gemäss
0
0
0
0
xµ 7→ xµ
=
Λµ ν xν
=
(δνµ + ω µ ν + o(ω 2 ))xν
.
ψ(x) 7→ ψ 0 (x0 ) = D(Λ)ψ(x) = (1 + ω µν Σµν + o(ω 2 ))ψ(x)
Ist
ψ
zum Beispiel ein Diracspinor, so ist
Σαβ =
gegeben, wo
γµ
Σ
(3.4)
durch die Formel
1
[γα , γβ ] ,
8
(3.5)
die bekannten Dirac-Matrizen sind. Ebenfalls im Minkowskiraum
ist der Gradient für
ψ
natürlich gegeben durch die partiellen Ableitungen. Eine
Transformation der Koordinaten mit Λ bewirkt eine Transformation der Basis∂
vektoren
mit der inversen Transformation. Man kann sich auch allgemeiner
∂xµ
vorstellen, dass man die Koordinaten x fest lässt und nur von der Koordinaten∂
basis
des Tangentialraumes an jedem Punkt auf ein anderes Basissystem bµ
∂xµ
0
transformiert. Dann wären die Argumente der Wellenfunktionen ψ und ψ in
(3.4) identisch, was die Physik besser widerspiegelt, falls man sich eine passive
Transformation vorstellt, denn eigentlich sind Raumpunkte etwas Festes und nur
die Wahl von Basisrichtungen für jeden Punkt ist willkürlich. Es ist jedoch notwendig, eine solche Basis einzuführen, um eine Interpretation der Wellenfunktion
ψ
zu erhalten, die dann durch die Spinoperatoren bezüglich dieser Basis gegeben
ist. Im Folgenden wird diese Sichtweise benutzt und zusätzlich die Basistransformation ortsabhängig gewählt.
Um nun diese Überlegungen auf einen allgemeinen gekrümmten Raum zu
1
übertragen benutzt man den Vierbein-Formalismus . Man führt an jedem Punkt
der Raumzeit ein dierenzierbares orthonormales Vierbein
lenfunktion
ψ(x)
nα (x)
und eine Wel-
ein, und benutzt ersteres um den Komponenten der Wellen-
funktion an jedem Punkt der Raumzeit einen Sinn zu geben. Wenn man das
0
Vierbein nα (ortsabhängig) in ein anderes nα transformiert, so transformiert sich
die Wellenfunktion entsprechend mit
β
nα (x) 7→ n0α (x) = Λ−1 α (x)nβ (x)
ψ(x) 7→ ψ 0 (x) = D(Λ(x))ψ(x),
(3.6)
wodurch der Spinor seine Richtungsinterpretation erhält. Die erste Eigenschaft
der kovarianten Ableitung wie in der Fuÿnote 2 auf Seite 10 angegeben, ermög0
licht es nun an einem beliebigen Punkt p der Raumzeit ein Vierbein nα (durch
Integration der Paralleltransportgleichung (2.2) in alle Richtungen von p aus)
einzuführen für welches dann
∇n0α |p = 0
1 siehe zum Beispiel Weinberg (1972)
und
nα (p) = n0α (p)
(3.7)
21
3.1.
DER SPINZUSAMMENHANG
gilt.
Dieses Vierbein dreht sich also am Punkt
p
in keine Richtung und es ist
damit natürlich, für die kovariante Ableitung des Spinors an diesem Punkt wie
im achen Raum den gewöhnlichen Gradienten
∇0µ ψ 0 p = ∂µ ψ 0 |p
(3.8)
zu setzen.
Dabei ist zu beachten, dass hier die Ableitungen in Koordinaten∂
2
richtung
gemeint sind und nicht die in Vierbein-Richtung . Wenn man jetzt
∂xµ
fordert, dass die kovariante Ableitung eines Spinors wieder einen Spinor ergibt so
folgt daraus für die kovariante Ableitung bezüglich des Vierbeines
nα
∇µ ψ =
D(Λ−1 )∇0 ψ 0
=
D(Λ−1 )(∇0 (D(Λ)ψ)
= D(Λ−1 ) ((∂µ (D(Λ)) ψ + D(Λ) (∇0 ψ)) .
(3.9)
Λ ist am Punkt p aufgrund der Denition (3.7) identisch mit der Einheitsmatrix,
−1
wodurch alle Terme D(Λ) und D(Λ ) durch eine 1 ersetzt werden können und
nur der Ausdruck ∂µ D(Λ) zu Bestimmen bleibt. Entwickelt man nun die Funktion
Λ(x) um den Punkt p in Koordinaten, die am Punkt p verschwinden
Λα β (x) = δβα + xµ ∂µ Λα β + o(x2 )
(3.10)
so erhält man durch Vergleich mit (3.4)
ω αβ (x) = η βγ (xµ ∂µ Λα γ )
(3.11)
∂µ D(Λ)|p = η βγ ∂µ Λα γ |p Σαβ .
(3.12)
und damit
Man kann den Gradienten von
Λ
nun noch durch das ursprüngliche Vierbein
darstellen, denn es gilt ja
∇nβ |p = ∇ (Λα β n0α )|p = (∇Λα β )|p n0α |p = (∇Λα β )|p nα |p ,
da per Denition (3.7) die kovariante Ableitung von
n0α
verschwindet und damit
∇Λα β |p = nα ∇nβ
falls
nα
die duale Basis zu
nα
bezeichnet.
(3.13)
(3.14)
Setzt man nun (3.12) und (3.14) in
∇0 der normale Gradient ist, und
die Gleichung (3.9) ein, berücksichtigt, dass
2 Die kovariante Ableitung in Vierbein-Richtung ist einfach
nµα ∇µ ,
wodurch man noch eine Summe auszuführen hat. Die partiellen Ableitungen in Koordinatenrichtung sind dagegen schon vorhanden durch die Wahl des Koordinatensystems.
22
KAPITEL 3.
QUANTENMECHANIK AUF WELTLINIEN
bemerkt noch, dass die Dualformen der Basisvektoren aufgrund deren Orthonorαγ
malität durch η g(nγ , ·) gegeben sind, so erhält man für die kovariante Ableitung
des Spinors am Punkt
p
∇µ ψ = ∂µ + (g(nα , ∇µ nβ ) Σαβ ψ ≡ (∂µ + Γµ )ψ.
(3.15)
Γµ
wird auch als Spinzusammenhang bezeichnet. Man beachte, dass in dieser
0
Gleichung nα nicht mehr auftritt und dass zur Herleitung nur die punktweise
Existenz eines solchen Vierbeines benutzt wurde. Dies bedeutet, dass diese Gleichung an jedem Punkt der Raumzeit unabhängig von einer speziellen Wahl des
Vierbeines gilt.
Der Spinorzusammenhang in Fermi-Koordinaten bezüglich des Vierbeines (2.37)
lautet
1 0i
1
Σ (Ri00m xm − ai ) − Σij (Rij0m xm )
4
8
1 jk
1 0i
m
=
Σ R0jmi x − Σ Rjkim xm
8
16
Γ0 =
Γi
(3.16)
3.2 Pauli-Gleichung auf der Weltlinie
Um die relativistischen Korrekturen in der Pauli-Gleichung für das Elektron zu
erhalten, geht man genau so vor wie im Lehrbuch.
Man geht von der Dirac-
Gleichung aus, die man nach dem Prinzip der minimalen Kopplung an das elektrische und auÿerdem auch an das Gravitationsfeld koppelt und führt anschlieÿend
eine Foldy-Wouthuysen-Transformation durch, die die kleinen Komponenten näherungsweise von den groÿen entkoppelt.
Dies soll hier nicht in allen Details
durchgeführt werden. Dazu wird auf die Doktorarbeit von Marzlin (1999)verwiesen. Hier sollen nur die Fakten zusammengestellt werden.
Die Dirac-Gleichung in der Minkowskiraumzeit inklusive minimaler Kopplung
µ
~ lautet
an das elektromagnetische Feld A = (Φ, A)
(γ µ (i∂µ + eAµ ) − im)ψ = 0,
wobei
γµ
(3.17)
die Dirac-Matrizen sind, welche der Algebra
{γ µ , γ ν } ≡ γ µ γ ν + γ ν γ µ = 2η µν
genügen und
Aµ
potentials sind.
(3.18)
die kovarianten Komponenten des elektromagnetischen VektorEine mögliche Darstellung der Dirac-Matrizen, auf die in Bei-
spielen Bezug genommen wird, ist
0
γ =i
1 0
0 −1
,
j
γ =i
0 σj
−σ j 0
.
(3.19)
3.2.
σj
23
PAULI-GLEICHUNG AUF DER WELTLINIE
i
sind die Pauli-Spinmatrizen und das Auftreten der imaginären Einheit
vor
jeder Matrix, was vielleicht ungewohnt sein mag, kommt von der Vorzeichenµν
konvention der Metrik η . Zur allgemein-relativistischen Verallgemeinerung der
Dirac-Gleichung gelangt man, wenn man das Prinzip der minimalen Kopplung
auch für die Raumzeit anwendet und die partiellen Ableitungen durch kovariµ
ante Spinor-Ableitungen (3.15) ersetzt. Dabei ist zu beachten, dass die γ in
der ursprünglichen Gleichung zu orthogonalen Richtungen gehörten. Da man ja
ohnehin ein Vierbein
nα
einführen muss, um der kovarianten Ableitung und der
Wellenfunktion einen Sinn zu geben, bietet es sich an, die kovarianten Ableitungen in Koordinatenrichtung, die jetzt nicht mehr orthogonal zueinander stehen,
durch solche in Vierbein-Richtung zu ersetzen. Man gelangt somit zu der Gleichung
(γ α nµα (i∇µ + eAµ ) + im)ψ =
(γ̂ µ (i∇µ + eAµ ) + im)ψ = 0
(3.20)
γ̂ µ ≡ γ α nµα
(3.21)
wobei
gesetzt wurde. Für diese neuen Dirac-Matrizen gilt, wie man leicht nachrechnet,
{γ̂ µ , γ̂ ν } = 2g µν ,
(3.22)
was oensichtlich kovariant ist und im Minkowskiraum in die Gleichung (3.18)
übergeht. Das Skalarprodukt für diese Dirac-Gleichung lautet
hφ| ψi =
wenn
g
Z
d
3
√
x −gφ† γ 0 n0α γ α ψ,
3
(3.23)
die Determinante der Metrik in diesen Koordinaten bezeichnet denn die
Wahrscheinlichkeitsstromdichte
j µ = ψ † γ 0 nµα γ α ψ
(3.24)
ist, wie man zeigen kann, ein divergenzfreier Vektor, wodurch die durch die Gleichung (3.20) induzierte Zeitentwicklung unitär bezüglich des Skalarproduktes
(3.23) ist.
γ̂ 0
, schreibt die kovariante Abg 00
Γµ aus und stellt sie entsprechend um, so nimmt sie die
Multipliziert man die Dirac-Gleichung mit
leitung als
∇µ = ∂µ +
Form
i∂0 ψ = Hψ
(3.25)
3 Technisches Detail: Hier wird vorausgesetzt, dass die Raumzeit global hyperbolisch ist, so
dass eine Blätterung der Raumzeit in Cauchy-Hyperächen möglich ist und die Angabe von
Anfangswerten auf einer solchen Hyperäche die gesamte Dynamik eindeutig bestimmt.
Koordinaten sind einer solchen Blätterung angepaÿt.
Die
24
KAPITEL 3.
an, wobei
H
durch
QUANTENMECHANIK AUF WELTLINIEN
4
H = −i
γ̂ 0 γ̂ i
iγ̂ 0
(∂
+
Γ
−
ieA
)
+
eΦ
−
iΓ
−
m
i
i
i
0
g 00
g 00
(3.26)
gegeben ist. Dieser Operator ist im Allgemeinen nicht selbstadjungiert bezüglich
des Skalarproduktes (3.23).
H
ist also häug keine Observable und hat damit
keine Interpretation als Energie des Systems.
Prinzipiell ist der Grund für die
fehlende Hermitezität, dass die Dynamik der Raumzeit Teilchen erzeugen und
vernichten kann, was den Zustand aus dem Ein-Teilchen-Hilbertraum entfernt.
H soll der Ausdruck
Z
∂ √
(hψ| Hψi − hHψ| ψi) = d3 xψ † γ 0 0 ( −gn0α γ α )ψ,
∂x
Als Maÿ für die Anhermitezität von
dienen, woraus man als hinreichende Bedingung für die Hermitezität von
Verschwinden von
ablesen kann.
H
das
∂ √
( −gn0α γ α )
0
∂x
Diese Bedingung ist insbesondere für eine stationäre Raumzeit
∂
g = 0 gilt, die
∂x0 µν
erfüllbar, für die in einem passenden Koordinatensystem
5
Metrik also nicht zeitabhängig ist .
Sind die zeitlichen Variationen der Metrik
klein und integriert man die Bewegungsgleichung über begrenzte Zeitbereiche, so
kann die fehlende Hermitezität von
6
H
in der Bewegungsgleichung vernachlässigt
werden .
Weiÿ man aufgrund einer bestimmten experimentellen Anordnung oder wegen anderer Gründe, dass die Wellenfunktion auf ein kleines Gebiet beschränkt
ist, wie zum Beispiel bei einem System in einer Falle, wo die Wellenfunktion
um das Fallenzentrum lokalisiert ist, so bietet es sich an, die Dirac-Gleichung
in den Fermi-Koordinaten bezüglich einer Weltlinie, die im Träger der Wellenfunktion liegt, bei der Falle also zum Beispiel im Zentrum dieser zu betrachten.
Natürlich ist dies keine vollständige Beschreibung des Systems, da sich die FermiKoordinaten im Allgemeinen nicht über die gesamte Raumzeit ausdehnen lassen.
Ist die Wellenfunktion jedoch so gut lokalisiert, dass sie auÿerhalb dieses Gültigkeitsbereiches annähernd verschwindet, so ist der Beitrag zur Dynamik aus anderen Gebieten der Raumzeit verschwindend gering und eine Beschränkung auf den
Bereich der Raumzeit, der durch die Fermi-Koordinaten überdeckt wird, zulässig.
4 Dies führt im achen Raum zur üblichen Form der Dirac-Gleichung, wenn man
und
β = −iγ
0
αi = −γ 0 γ i
setzt.
5 Es gibt allerdings auch stationäre Raumzeiten, für die die Bewegungsgleichungen (3.25)
mit Anfangsbedingungen auf einer raumartigen Hyperäche kein vollständiges Cauchyproblem
darstellen und damit auch keine eindeutige Lösung besitzen (Fulling 1989). Solche Fälle sind
allerdings sehr pathologisch, nur in kosmischen Dimensionen von Belang und können bei unserer
lokalen Analye vernachlässigt werden.
6 s. Parker (1980)
3.2.
25
PAULI-GLEICHUNG AUF DER WELTLINIE
Beschränkt man sich weiterhin darauf, die Metrik bis zur zweiten Ordnung zu
entwickeln und in dieser Form in die Dirac-Gleichung einzusetzen, so wird der
Bereich, in dem die Wellenfunktion wesentlich von
0
verschieden sein darf weiter
eingeschränkt durch die Bedingung (2.36), dass die Entwicklung der Metrik ihre
Bedeutung behält und nicht durch Terme höherer Ordnung dominiert wird, welche ja vernachlässigt wurden. Diese Bedingung kann nach der Bestimmung der
exakten Dynamik, die durch die so erhaltene Bewegungsgleichung gegeben ist,
auf Konsistenz geprüft werden.
Schreibt man also den kovarianten Hamilton-Operator (3.26) in Fermi-Koordinaten und berücksichtigt dabei die Form (3.16) des Spin-Zusammenhangs, das
Vierbein (2.37) und die Metrik (2.35) und setzt die Dirac-Matrizen (3.21) ein, so
erhält man
1
1
k l
0
k l i
H = −im 1 + ~a · ~x + R0k0l x x γ + R0kil x x γ + eΦ +
2
6
1
+ αi + ~a · ~xαi + [R0kil + R0k0l αi +
2
1
1
j i
k l
+ Rikjl αj + R0kjl γ γ x x (−∂i − eAi )
3
3
i
i
i
− ai αi + γ i γ j R0ikj xk + αj [Rjk − R0j0k ] xk
2
4
4
(3.27)
Man kann nun eine Foldy-Wouthuysen-Transformation nden (Marzlin 1999),
i
die die Terme mit ( γ , αi ) als Faktoren, welche die oberen und unteren Komponenten des Spinors koppeln, für nichtrelativistische Geschwindigkeiten aus dem
Hamilton-Operator eliminiert und das Skalarprodukt (3.23) in die normale Schrödinger-Form
hφ| ψi =
Z
d
3
xφ† ψ
(3.28)
überführt. Der transformierte Hamilton-Operator lautet dann
1
i 0
H̃ = −im(1 + ~a · ~x + R0k0l xk xl )γ 0 −
γ (−i∂ i − eAi )(−i∂i − eAi ) +
2
2m
e 0~
e j
~
+eΦ + i
γ Σ · rotA +
γ (Ȧj + ∂j Φ)
(3.29)
2m
2m
wobei
~ =
Σ
~σ 0
0 ~σ
(3.30)
ist. In Abwesenheit eines elektromagnetischen Feldes ist dieser Hamilton-Operator
ein gerader Operator und entkoppelt groÿe und kleine Komponenten. Hieran kann
man die relativistischen Korrekturen der Bewegungsgleichung ablesen. Diese setzen sich aus
m~a · ~x
(3.31)
26
KAPITEL 3.
QUANTENMECHANIK AUF WELTLINIEN
aufgrund der Beschleunigung auf der Weltlinie und
m
R0l0m xl xm
2
(3.32)
wegen der Krümmung des Raumes zusammen. Der letzte Term ist Ausdruck für
die Gezeitenkräfte auf das ausgedehnte System.
Störend ist an dem Ergebnis
(3.29) der letzte Term, proportional zum elektrischen Feld
~ = −∇Φ − A,
~˙
E
(3.33)
m 2 2
ω x
2
an, was für ein Teilchen in der Falle vernünftig erscheint, so ist die Ausdehnung
der weiterhin ungerade ist. Nimmt man ein harmonisches Potential
eΦ =
√
des Wellenpaketes im Grundzustand von der Gröÿenordnung ∆x ∼ 1/ ωm und
1
e
damit ist der Term eΦ ∼
ω in diesem Raumbereich viel gröÿer als 2m
∂j Φ ∼
2
pω
ω
falls ω m und entsprechend ist dann die Ausdehnung des Wellenpaketes
2
m
1
m1 = λ̄c viel gröÿer als die Compton-Wellenlänge. Ist zudem das
∆x = √mω
~ viel stärker als die zeitliche Abhängigkeit
magnetische Feld rot A
~˙ so
A,
kann man
diesen letzten Term vernachlässigen. Unter dieser Annahme sieht man, dass falls
man das Elektron ohne Magnetfeldeinuÿ transportiert (
~ = 0),
A
keine Kopp-
lung mit dem Spin vorhanden ist, das Teilchen sich also in diesen Koordinaten
nicht dreht.
Die Koordinaten sind auf dieser Weltlinie nach Denition Fermi-
Walker-parallel und das Ergebnis aus Abschnitt 2.1.1 wird hier noch einmal für
quantenmechanische Systeme bestätigt. Natürlich ist bei dieser Argumentation
zu beachten, dass das Elektromagnetische Feld ebenso in beschleunigten Koordinaten anzugeben ist und man deswegen in den Maxwell-Geichungen (neben
einüssen durch die Raumkrümmung) ebenfalls Korrekturen auf Grund der Beschleunigung zu erwarten hat, so dass eine Ladungsverteilung ohne Ströme in
diesem Koordinatensystem nicht nur ein elektrostatisches Feld erzeugt und ein
beschleunigter Transport ohne Magnetfeldeinuss deswegen nicht ohne weiteres
möglich ist. Dies soll hier aber nicht weiter verfolgt werden.
In einer detaillierten Rechnung, die von Gleichung (3.26) ausgeht, zeigt Parker
(1980) für den unbeschleunigten ( ~
a
= 0)
und Marzlin (1999) für den allgemeinen
Fall, dass für das Beispiel des Wasserstoatoms auf der Erdoberäche die Korrekturen zu den Energieniveaus aufgrund der dort herrschenden Raumkrümmung
−42
von der Gröÿenordnung 10
eV sind. Aufgrund der Erdbeschleunigung ergibt
−52
sich eine Korrektur von 10
eV. Um durch die Raumkrümmung eine Niveauverschiebung in der Gröÿenordnung der Lamb-Verschiebung zu erzeugen, sind
−5
Gravitationsfelder mit einem charakteristische Krümmungsradius von r = 10 m
nötig.
Insgesamt kann man sagen, dass der Einuss der Raumkrümmung auf den
Hamilton-Operator eines ausreichend lokalisierten Systems nur in kosmischen Dimensionen interessant werden kann, wo dann immer noch Präzisionsspektroskopie
3.3.
27
DER 'HILBERTRAUM AUF DER WELTLINIE'
notwendig ist, um den Eekt zu messen. Für Anwendungen in der Nähe der Erde oder unseres Sonnensystems ist er jedoch durchweg zu vernachlässigen. Auch
realistische Beschleunigungen für ein Labor ( 10g ) haben normalerweise einen unerheblichen Eekt. Daraus sieht man, wie bereits gemutmaÿt, dass für Systeme
von hinreichend kleiner Ausdehnung, niedrigen Energien und bei moderater Beschleunigung die Korrekturen gegenüber dem inertialen System im Minkowskiraum vernachlässigt werden können, sodass die Annahme eines starren HamiltonOperators, der die Zeitentwicklung des Systems entlang der Weltlinie bezüglich
der Eigenzeit beschreibt, zumindest für atomare Systeme eine sehr gute Näherung ist. Zu berücksichtigende Eekte sind dann nur kinematischer Natur und
schlieÿen Eekte wie Thomaspräzession, Zeitdilatation und die Wegabhängigkeit
des Paralleltransportes mit ein.
3.3 Der 'Hilbertraum auf der Weltlinie'
Wir haben nun gesehen, dass die Quantenmechanik des lokalisierten Systems auf
einer Weltlinie
γ
mit den Einschränkungen und Korrekturen, die durch die unver-
meidliche Ausdehnung eines Quanten-Systems entstehen, wie vermutet dem Äquivalenzprinzip gehorcht und in Fermi-Koordinaten durch eine zur Pauli-Gleichung
der nichtrelativistischen Quantenmechanik äquivalente Bewegungsgleichung beschrieben werden kann. Auÿerdem hatten wir gesehen, dass ein atomares System
weder durch Beschleunigungseekte noch durch Gezeitenkräfte wesentlich beeinusst wird und sich als starres System entlang der Weltlinie durch die Raumzeit
bewegt.
Wir werden deswegen im Folgenden annehmen, dass das System unter Betrachtung durch einen Zustandsraum der internen Freiheitsgrade
7
beschrieben
wird, dessen Dynamik durch einen bekannten, von der Bahn unabhängigen Hamilton-Operator bestimmt wird. Bei der obigen Herleitung wurde exzessiv von
Fermi-Koordinaten Gebrauch gemacht, sodass alle Gröÿen, die durch die nichtrelativistische Bewegungsgleichung beschrieben werden, bezüglich dieses Koordinatensystems zu verstehen sind. Dem entsprechend ist der zeitliche Parameter
der Bahnparameter, also die Eigenzeit
τ
auf der Weltlinie, und die Spin-Matrizen
beziehen sich auf die räumlichen Vektoren
ni
von (2.37).
Das elementare System der Quanteninformationstheorie wird durch ein solches System auf der Weltline repräsentiert. Allgemein wird man viele lokalisierte
Systeme verwenden um in ihnen Informationen zu speichern und auf den Weltlinien zu versenden.
Das Ziel dieses Kapitels ist es, eine formale Beschreibung
von Quantenkommunikationsprotokollen durch lokalisierte Systeme auf Weltlinien zu geben. Eine solche Beschreibung muss dann die Standardkomponenten von
QIT-Protokollen abdecken, die aus der lokalen Präparation von Zuständen, der
7 Bei einem Atom also zum Beispiel alle atomaren Anregungsniveaus
28
KAPITEL 3.
QUANTENMECHANIK AUF WELTLINIEN
freien Zeitentwicklung und der Analyse mittels lokaler Messungen und klassischer
Kommunikation zwischen den Parteien besteht.
3.3.1
Formale Beschreibung
In diesem Sinne beteht ein elementares System aus einer zeitartigen Weltlinie
durch die Raumzeit, einem Fermi-Walker-parallelen Vierbein
n0 = γ̇
traum
nα
γ(τ )
mit Zeitrichtung
entlang der Weltlinie, das die räumlichen Achsen bestimmt, einem Hilber-
H
und einem vollständigen Satz von kommutierenden Observablen
qi ,
die
bezüglich des gegebenen Koordinatensystems invariant deniert werden können.
Letzteres bedeutet, dass man für jeden Operator
qi
eine operative Vorschrift an-
geben kann, die sich nur auf das räumliche Koordinatensystem bezieht, um die
Messung, die durch den Operator qi beschrieben werden soll zu implementieren.
1
Für das Beispiel des Spin
Systems bedeutet das zum Beispiel, dass man dem
2
Experiment, bei dem das Teilchen durch einen in n3 Richtung orientierten SternGerlach-Magneten geleitet wird, die Observable
σz
8
zuordnet . Dieser vollständige
Satz von Observablen deniert eine Basis, nämlich die Eigenbasis
qiτ |q10 , . . . , qn0 , τ i = qi0 |q10 , . . . , qn0 , τ i
(3.34)
in dem Hilbertraum des Systems und bestimmt damit die physikalische Bedeutung für Vektoren in diesem Raum. Ist die Vorschrift, die einer solchen Observablen eine physikalische Bedeutung gibt, zeitunabhängig in Bezug auf das gegebene Koordinatensystem, so macht es Sinn, die Eigenvektoren der Observablen als
9
zeitunabhängig zu denieren , wodurch die Observablen ebenfalls zeitunabhängig
sind
d
dτ
qi = 0.
(3.35)
Die (freie) Dynamik des Systems wird durch einen unitären Propagator
geben, für den für alle Zeiten
Uτ 0 τ
ge-
τ
Uτ τ = 1
(3.36)
gilt und der der Schrödingergleichung
i
d
dτ
Uτ τ0 = HUτ τ0
(3.37)
8 In diesem Sinne ist auch die Pauli-Gleichung mit dem Hamilton-Operator (3.29) zu verstehen. Die dort auftretenden Operatoren
~a · ~σ
xi
und
~σ
beziehen sich auf Fermi-Koordinaten. Um
zu messen ist ein Stern-Gerlach-Magneten in der Richtung
ai ni
auszurichtet und um
~x
zu
messen muss ein mit den räumlichen Koordinaten markierter Schrim aufgestellt werden.
9 Der Hilbertraum als abstraktes Konstrukt besitzt keine ausgezeichneten Richtungen sonder
nur Winkel und Längen durch das Skalarprodukt und es ist deswegen nicht von vornherein klar,
wie der Hilbertraum zu einer Zeit mit dem zu einer anderen Zeit identiziert werden soll. Dies
wird hier durch die Zeitunabhängigkeit der Eigenvektoren einfach deniert.
3.3.
29
DER 'HILBERTRAUM AUF DER WELTLINIE'
genügt, wobei
H
der Hamilton-Operator dieses elementaren Systems ist. Um ein
τ0 in einem
Zustand ρ präparieren, wobei ρ ein beliebiger positiver Operator mit tr ρ = 1 sein
kann. Nach der Präparation wird man zu einer Zeit τ eine Messung durchführen. Wird diese Messung durch den selbstadjungierten Operator A repräsentiert,
Experiment durchzuführen, wird man zunächst das System zur Zeit
so ist die Statistik dieses Experiments gegeben durch die Erwartungswerte aller
Potenzen von
A.
Diese sind durch
hAnτ iρτ = tr(Uτ τ0 ρUτ†τ0 An )
(3.38)
0
gegeben.
Die linke Seite dieser Gleichung beschreibt das gesamte Experiment
A, zur
ρ präpariert wurde. Will man auch
dissipative Prozesse beschreiben, so muss der unitäre Propagator Uτ 0 τ durch einen
10
Kraus-Propagator
Kiτ 0 τ , mit den Eigenschaften
X
Kiτ 0 τ Kiτ† 0 τ = 1
(3.39)
und ist folgendermaÿen zu lesen: Der Erwartungswert der Observablen
Zeit
τ
gemessen, falls zur Zeit
τ0
der Zustand
i
Kiτ τ = ci
ersetzt werden, wobei die
ci
beliebige Konstanten sein können, für die
gilt. Der zu (3.38) äquivalente Ausdruck ist dann
X
Kiτ τ0 ρKiτ† τ0 An ).
hAnτ iρτ = tr(
0
P
i ci
=1
(3.40)
i
Diese Sichtweise, in der der Propagator als eigenständiges Objekt betrachtet wird
und die freie Bewegung beschreibt, soll hier Propagatorbild genannt werden. Aus
dem Propagator kann nun je nach Bedarf eines der üblichen Bilder konstruiert
werden, indem man den ihn entweder in der Dichtematrix (Schrödingerbild) oder
in den Observablen (Heisenbergbild) absorbiert, sodass man für den Erwartungswert einer Messung den folgenden Ausdruck erhält
hAnτ iρτ = tr(ρτ0 (τ )An ) = tr(ρAτ0 (τ )).
0
In beiden Fällen erinnert der Index
tems und das Argument
τ
τ0
(3.41)
an den Zeitpunkt der Präparation des Sys-
an den Zeitpunkt der Messung der Observablen. Im
Schrödingerbild sind die Observablen Zeitunabhängig und für den Dichteoperator
gilt eine verallgemeinerte Schrödinger-Dynamik
∂
ρτ (τ ) = −i [H, ρτ0 (τ )] + Lext ρτ0 (τ ).
∂τ 0
(3.42)
10 Krausoperatoren sind die allgemeinste Form von positiven linearen Abbildungen auf Operatoren(Kraus 1983)
30
KAPITEL 3.
Lext
QUANTENMECHANIK AUF WELTLINIEN
ist dabei ein Lindblad-Operator.
Entsprechend ist im Heisenbergbild die
Dichtematrix zeitunabhängig und die Observablen gehorchen der heisenbergschen
Bewegungsgleichung
d
dτ
wobei
Ľext
Aτ0 (τ ) = i[H, Aτ0 (τ )] + Ľext Aτ0 (τ ),
(3.43)
der bezüglich der Spur adjungierte Lindblad-Operator ist. In beiden
Fällen beschreiben die Operatoren jedoch die gleiche (zeitunabhängige) Vorschrift
zur Präparation und Messung an einem System. Wir werden hier vor allem das
Propagatorbild, benutzen, denn dies zeichnet eindeutig die Zeiten aus, an denen
von auÿen Manipulationen am System vorgenommen werden welche ja gerade die
Ereignisse sind, die im Quantenkommunikationsszenario interessieren. Auÿerdem
können in diesem Bild, wie wir sehen werden, die Korrelationsfunktionen von
mehreren aufeinanderfolgenden Messungen einheitlich formuliert werden.
Werden an einem System nacheinander mehrere Messungen durchgeführt, so
kann man sich dafür interessieren, wie die Ergebnisse der einzelnen Messungen
miteinander korreliert sind.
präpariert und zu den
Observablen
Zeiten
τi
Ai
n
Das System werde zur Zeit
Zeiten
τi (τ0 ≤ τ1 < τ2 < . . .)
τ0
in dem Zustand
ρ
werden Messungen der
durchgeführt. Die Reihenfolge dieser Messungen wird durch die
eindeutig festgelegt, da die Messungen zu Punkten auf der Weltlinie
gehören und diese zeitartig ist. Um nun eine vollständige Statistik des Experiments zu erhalten, muss man die Wahrscheinlichkeiten für alle Kombinationen
von Messergebnissen bestimmen. Ist die Spektralzerlegung der Observablen
gegeben durch
11
Ai =
X
aij Pij ,
Ai
(3.44)
j
wobei
Pij
Eigenwert
orthogonale Projektoren auf die Eigenräume der Observablen
aij
Ai
mit
a1j bei der
τ0 ) präpariert
sind, so ist die Wahrscheinlichkeit für das Ergebnis
ersten Messung (zur Zeit
τ1 )
unter der Bedingung das
ρ
(zur Zeit
wurde gegeben ist durch
p(a1j,τ1 |ρτ0 ) = tr
X
†
P1j Kaτ1 τ0 ρKaτ
P
1 τ0 1j
!
.
(3.45)
a
Nach der Messung mit Ergebnis
ρ1j,τ1 =
X
a1j
ist das System im Zustand
P1j Kiτ1 τ0 ρKiτ† 1 τ0 P1j /p(a1j |ρ).
(3.46)
i
Man beachte, dass die Dichtematrix nach der Messung einen neuen Zeitindex
erhält. Dies ist so, da Messungen im Prinzip ähnlich wie Präparationen sind, auf
11 Wir beschränken uns hier der Einfachheit halber auf von Neumann Messungen.
allerdings problemlos, das Folgende auf verallgemeinerte Messungen zu transferieren.
Es ist
3.3.
31
DER 'HILBERTRAUM AUF DER WELTLINIE'
jeden Fall aber irreversible Prozesse darstellen und es daher keinen Sinn macht,
nach einer solchen Projektion die Dichtematrix wieder zurück zu propagieren.
a2k bei der zweiten Messung unter der
Bedingung, dass bei der ersten das Ergebnis a1j erhalten wurde, ist gegeben durch
Die Wahrscheinlichkeit für das Ergebnis
p(a2k,τ2 |a1j,τ1 ∧ ρτ0 )
=
!
tr
X
†
P2k Kbτ2 τ1 ρ1j,τ1 Kbτ
P2k
2 τ1
tr
X
†
†
P2k Kbτ2 τ1 P1j Kaτ1 τ0 ρKaτ
P Kbτ
P2k
1 τ0 1j
2 τ1
b
=
!
/p(a1j,τ1 |ρτ0 )
ab
= p(a2k ∧ a1j |ρ)/p(a1j |ρ)
(3.47)
woraus sich für die Wahrscheinlichkeit für ein gemeinsames Eintreten von
und
a1j
a2k
X
p(a1j ∧ a2k |ρ) = tr
†
†
P Kbτ
P
P2k Kbτ2 τ1 P1j Kaτ1 τ0 ρKaτ
1 τ0 1j
2 τ1 2k
!
(3.48)
ab
ablesen lässt. Es ist leicht Einzusehen wie dies für die weiteren Messungen fortzusetzen ist. Der Einfachheit halber wird ab hier auf eine unitäre Dynamik angenommen. Alle folgenden Aussagen bleiben auch für nicht unitäre Dynamik weiter
bestehen, es sei denn es wird eine gesonderte Bemerkung darüber gemacht. Die
Wahrscheinlichkeit, nacheinander zu den entsprechenden Zeiten die Ergebnisse
a1j , . . . , ank
zu erhalten, ist dann gegeben durch
p(a1j,τ1 ∧ . . . ∧ ank,τn |ρτ0 ) =
= tr(Pnk Uτn τn−1 . . . Uτ2 τ1 P1j Uτ1 τ0 ρUτ†1 τ0 P1j Uτ†2 τ1 . . . Uτ†n τn−1 Pnk ).
(3.49)
Kennt man alle diese Wahrscheinlichkeiten, so besitzt man die vollständige Information über dieses Experiment. Benutzt man bei einer unitären Dynamik das
Heisenbergbild, so vereinfacht sich dieser Ausdruck zu
p(a1j,τ1 ∧ . . . ∧ ank,τn |ρτ0 ) = tr(Pnk,τ0 (τn ) . . . P1j,τ0 (τ1 )ρP1j,τ0 (τ1 ) . . . Pnk,τ0 (τn )).
(3.50)
Alternativ zu der Bestimmung der kombinierten Wahrscheinlichkeiten für die
Meÿresultate kann man natürlich auch die Erwartungswerte aller Monome der
Messergebnisse berechnen, welche durch
n
Ak1,τ1 1 · Ak2,τ2 2 · . . . · Akn,τ
n
gegeben sind
12
.
ρτ0
=
X
ak1i11 · . . . · akninn p(a1i1 ,τ1 ∧ . . . ∧ anin ,τn |ρτ0 )
(3.51)
i1 ...in
Rechnerisch bietet diese Gröÿe einen Vorteil, falls man eine
unitäre Dynamik hat. Vertauschen dann alle Observablen im Heisenbergbild
[Ai,τ0 (τi ), Aj,τ0 (τj )] = 0,
(3.52)
12 Dies entspricht nicht den Korrelationsfunktionen aus der Standardliteratur. In der Notation
wird dies durch die Punkte zwischen den Operatoren deutlich gemacht.
32
KAPITEL 3.
QUANTENMECHANIK AUF WELTLINIEN
so ist dieser Erwartungswert, wie man leicht nachrechnet, durch
n
Ak1,τ1 1 · Ak2,τ2 2 · . . . · Akn,τ
n
ρτ0
n
= tr ρAk1,τ1 0 (τ1 )Ak2,τ2 0 (τ2 ) . . . Akn,τ
(τn )
0
(3.53)
gegeben und es ist zur Berechnung nicht nötig die Spektralzerlegung (3.44) der
Observablen zu kennen.
3.3.2
Mehrere Systeme
Betrachtet man nun N Systeme zusammen, so gibt es zunächst N Weltlinien
(i)
γ (i) mit je einem Vierbein nα pro Weltlinie und Hilbertraum H(i) . Die Koordinatensysteme der einzelnen Weltlinien haben nun a priori nichts miteinander
zu tun, sodass es auch keinen Weg gibt, das eine in das andere zu überführen.
Dies liegt daran, dass die lokalen Koordinatensysteme, selbst wenn sie maximal
möglich ausdehnt werden, sich im Allgemeinen nicht überlappen, und somit keine Transformationsregel zwischen ihnen existiert. Natürlich bedeutet dies nicht,
dass es kein Koordinatensystem gibt, welches die Bereiche aller Weltlinien überdeckt, allerdings hätte ein solches Koordinatensystem nichts mehr mit den einzelnen Weltlinien zu tun und könnte die Eigenschaften dieser nicht mehr invariant
widerspiegeln.
Versucht man zum Beispiel ein Koordinatensystem zu konstru-
ieren, das als Zeitkoordinate auf zwei Weltlinien gerade die Eigenzeit besitzt,
so wird man, falls sich die Weltlinien mehr als einmal schneiden, am ZwillingsParadoxon scheitern. Dies besagt gerade, dass auf den zwei Weltlinien, zwischen
zwei Schnittpunkten, im Allgemeinen verschiedene Zeiten verstrichen sind. Ordnet man einem Schnittpunkt die Zeit
t0
zu, so wird die Eigenzeit bezüglich der
ersten Weltlinie am zweiten Schnittpunkt
ten
t2 ,
t1
betragen und bezüglich der Zwei-
wodurch eine eindeutige Zuordnung von Zeiten zu beiden Schnittpunkten
unmöglich wird.
Es ist auÿerdem zu berücksichtigen, dass der Fermi-Walker-
Transport wegabhängig ist und deswegen auch Raumrichtungen von Weltlinien
an Schnittpunkten nicht eindeutig deniert sind. Aus diesem Grund scheint es
zweckmäÿig, jeder Weltlinie ihr eigenes Koordinatensystem zu belassen und eine
Quantenmechanik in mehreren simultanen Koordinatensystem zu formulieren.
Der Zustandsraum des zusammengesetzten Systems muss aufgrund der linearen Struktur der Quantenmechanik das Tensor-Produkt des Zustandsraumes der
Teilsysteme
H=
O
H(i)
(3.54)
i
sein. Observablen eines Teilsystems sind von der Form
A(i) = 1(1) ⊗ . . . ⊗ 1(i−1) ⊗ A ⊗ 1(i+1) ⊗ . . . ⊗ 1(n) ,
was bedeutet, dass ein Experiment an einem Teilsystem
(3.55)
i wie im Fall eines einzel-
nen Systems nur den Zustand dieses Teilsystems testen kann. Die Frage ist nun,
3.3.
33
DER 'HILBERTRAUM AUF DER WELTLINIE'
was die Vektoren (bzw. Dichteoperatoren) in diesem Hilbertraum beschreiben.
Im Fall eines einzelnen Systems beschrieb ein Vektor aus dem Zustandsraum das
Ergebnis einer Präparation des Systems zum einem Zeitpunkt
τ0 .
Nun wird man
(i)
τ0 auf seiner
13
Bahn lokal präparieren, wodurch der Zustand ρ hergestellt wird . Der so präpa(i)
rierte Zustand liefert bei einer sofortigen Messung von lokalen Observablen A
(i)
zu den lokalen Zeiten τ0 an diesem System den Erwartungswert
entsprechend jedes einzelne der Teilsysteme zu einem Zeitpunkt
(1)
(2)
(N )
A (1) · A (2) · . . . · A (N )
τ0
was die Bedeutung von
(τ
(1)
,...,τ
(N )
).
τ0
τ0
ρτ0
ρτ 0
= tr A(1) . . . A(N ) ρ ,
klar macht. Das Symbol τ bezeichnet dabei das Tupel
Dabei wurde benutzt, dass die Observablen
A(i)
alle auf verschie-
denen Teilräumen operieren und deshalb alle miteinander vertauschen, sodass für
den Erwartungswert des Produktes die Gleichung (3.53) gilt. Insbesondere ist der
(i)
Erwartungswert einer beliebigen Observable A
der Form (3.55) eines einzelnen
(i)
Systems i zur Zeit τ0 gegeben durch
(i)
A (i)
τ0
ρτ0
= tr A(i) ρ = tri (Atrj6=i (ρ)) ≡ tri Aρ(i) ,
wobei tr i die Spur über das Teilsystem
i
meint. Nun ist es nötig, einen Propaga-
tor zu denieren, welcher es ermöglicht, aus einer Präparation
von Zeiten
men.
τ
(3.56)
ρ
zu einem Satz
die Erwartungswerte von Messungen zu späteren Zeiten zu bestim-
Zunächst soll dies für den Fall geschehen in dem die einzelnen Systeme
nicht miteinander in Wechselwirkung treten, sodass die Dynamik jedes einzelnen
System nicht vom Zustand der anderen Systeme abhängt.
3.3.3
Unabhängige Systeme
Sind die Teilsysteme unabhängig, so muss für jedes dieser Systeme ein Propagator
(i)
Uτ 0 τ wie in (3.37) gegeben sein 14 , denn die Unabhängigkeit gab uns ja gerade die
Berechtigung lokale System im Sinne des vorherigen Abschnittes einzuführen. Der
(i)
Erwartungswert einer Observablen des i-ten Teilsystems A
= 1⊗. . .⊗A⊗. . .⊗1
(i)
(i)
zur Zeit τ
> τ0 ergibt sich sodann entsprechend (3.38) durch
A
(i)
(i)
τ0
= tri AU
ρτ0
(i)
(i)
(i)
τ (i) τ0
ρ U
(i)†
(i)
τ (i) τ0
= tr A U
(i)
(i)
(i)
τ (i) τ0
⊗1
(j6=i)
ρU
(i)†
13 Dies scheint eine Einschränkung an die präparierbaren Zustände zu sein.
Abschnitt wird aber erläutert, warum dem nicht so ist.
14 Die folgende Argumentation funktioniert auch mit Kraus-Propagatoren
(i)
τ (i) τ0
⊗1
(j6=i)
.
(3.57)
Im nächsten
34
KAPITEL 3.
QUANTENMECHANIK AUF WELTLINIEN
Im letzten Schritt wurde der Propagator, der ursprünglich nur auf dem lokalen
Hilbertraum des Teilsystems deniert war, trivial auf den gesamten Zustands(i)
raum ausgedehnt. Im folgenden sei diese Ausdehnung implizit in Uτ 0 τ enthalten.
Um die gemeinsamen Wahrscheinlichkeiten für ein Experiment, wie es in Abbildung 3.1 dargestellt ist, zu berechnen, muss man nun in (3.49) jedes Teilsystem
für sich von Messung zu Messung propagieren, sodass sich
(1)
p a
= tr
(N ) (N )
Pnk U (N ) (N )
τ
τ
n
n−1
(2)
∧a
(1)
1j,τ1
(N )
∧ ... ∧ a
(2)
1l,τ1
(N )
nk,τn
|ρτ0
=
(1)†
(1) (2)†
(2)
(2) (2)
(1) (1)
. . . P1l U (2) (2) P1j U (1) (1) ρU (1) (1) P1j U (2) (2) P1l
τ1 τ0
τ1 τ0
τ1 τ0
τ1 τ0
(N )†
(N )
. . . U (N ) (N ) Pnk
τ
τ
n
n−1
(3.58)
ergibt.
An dieser Stelle bemerkt man eine Mehrdeutigkeit.
Die Zeitordnung
von Observablen auf verschiedenen Weltlinien wird dadurch, dass diese Weltlinien in vollständig verschiedenen Raumbereichen liegen können, durch nichts
eingeschränkt.
Da aber sowohl die Propagatoren als auch die Projektoren von
verschiedenen Teilsystemen immer nur auf die jeweiligen Teilsysteme wirken, vertauschen sie auch mit einander, sodass diese Beliebigkeit der Zeitordnung in der
Gleichung (3.58) keine Mehrdeutigkeit für die Wahrscheinlichkeiten nach sich
zieht und damit irrelevant ist.
Will man das Schrödingerbild benutzen, so hat der Zustand in diesem Bild
die Form
ρτ0 (τ ) = U
(1)
(1)
τ (1) τ0
...U
(N )
(N )
τ (N ) τ0
ρU
(N )†
(N )
τ (N ) τ0
...U
(1)†
(1)
τ (1) τ0
.
Die Observablen im Heisenbergbild werden entsprechend gebildet. Da aber für
ein gegebenes Teilsystem die Propagatoren der restlichen Teilsysteme alle mit
den lokalen Observablen vertauschen, gilt
A(i)
τ0 (τ ) = U
(1)†
(1)
τ (1) τ0
...U
(N )†
(N )
τ (N ) τ0
A(i) U
(N )
(N )
τ (N ) τ0
...U
(1)
(1)
τ (1) τ0
=A
(i)
(i)
τ0
(τ (i) )
(3.59)
und die lokalen Observablen hängen nur von der lokalen Zeit ab.
3.3.4
Zustandsreduktion
An dieser Stelle sind ein paar Bemerkungen über das Problem der Zustandsreduktion angebracht. In der Quantenmechanik existiert das bekannte Postulat
der Zustandsreduktion oder des Wellenfunktionskollaps, welches sicherstellt, dass
das Ergebnis einer Messung Realität besitzt, in dem Sinne, dass eine sich sofort
anschlieÿende Messung der gleichen Observable dasselbe Ergebnis liefert. Mathematisch drückt sich dieses Postulat so aus, dass ein quantenmechanisches System
mit Propagator
Uτ 0 τ
welches zur Zeit
τ0
im Zustand
ρ
(3.60)
präpariert wurde nach der Messung einer Ob-
servablen
A=
X
i
ai P i
(3.61)
3.3.
35
DER 'HILBERTRAUM AUF DER WELTLINIE'
γ (1) γ (2)
A(2)
3
(2)
τ3
(1)
τ3
γ (3)
(3)
A2
A(1)
3
(3)
τ2
(1)
A(1)
2 τ2
(2)
A(2)
2 τ
2
(1)
τ1
(1)
A1
(3)
τ1
A(3)
1
(2)
(2)
τ 1 A1
(1)
τ0
(2)
τ0
(3)
ρ
τ0
Abbildung 3.1: Ein Experiment an einem Satz von unabhängigen Systemen, das
in dem Zustand ρ präpariert wird und an dem anschlieÿend die
(i)
(i)
lokalen Messungen Aj zu den Zeiten τj
durchgeführt werden.
zu den Zeiten
τ0
36
KAPITEL 3.
zur Zeit
τ
mit dem Ergebnis
ai
QUANTENMECHANIK AUF WELTLINIEN
durch
ρai ,τ = Pi Uτ τ0 ρUτ†τ0 Pi /p(ai,τ |ρτ0 )
(3.62)
gegeben ist. Dieses Reduktionspostulat ist bei der Formulierung der Wahrscheinlichkeiten (3.49) und der Erwartungswerte (3.51) bereits eingeossen. Dabei war
die zeitliche Abfolge der Messungen in diesen Ausdrücken wesentlich.
Bei der
Verallgemeinerung der Erwartungswerte auf mehrere unabhängige Systeme hatten wir die Form des Ausdrucks aus (3.51) einfach übernommen und anschlieÿend
gesehen, dass die Mehrdeutigkeit der zeitlichen Ordnung in dem Ausdruck, die
durch die unabhängigen Zeitparameter entsteht, keine Rolle spielt und man damit
eine invariante Beschreibung der Experimente erhält.
Eigentlich hat man mit der Angabe aller Korrelationen für ein gegebenes
Experiment bereits alles über die dessen Statistik gesagt und kommt damit ohne
den kollabierten Zustand (3.62) aus. Aber manchmal ist es nützlich die kollabierte
Wellenfunktion zu berechnen, um verschiedene Experimente zu untersuchen, die
das Ergebnis
ai
bei der Messung
A
τ
zur Zeit
als Vorbedingung stellen oder bei
denen bedingte Operationen an dem System ausgeführt werden sollen.
Der bedingte Erwartungswert für ein Experiment, bei dem, mit den Bezeich(i)
(i)
Aj das Ergebnis ajk mit zugehörigem
(i)
Orthogonalprojektor Pjk geliefert hat, ist dann gegeben durch
nungen von Abbildung 3.1, die Messung
*
Y
a6=i,b6=j
A
(a)
(a)
b,τb
+
=
*
Y
A
a6=i,b6=j
(i)
ρ∧ajk ,τ0
=
X
tr
(a)
(a)
b,τb
·P
(i)
(i)
+
/p(ak,τ (i) |ρτ0 ) =
jk,τj
j
ρ,τ0
(i)
(i)
(i)
. . . Pj+1lij−1 Pjk Pj−1 . . .
lmn
(i)
(i) (i)
. . . ρ . . . Pj−1lij−1 Pjk Pj+1
. . .)/p(ak,τ (i) |ρτ0 (,3.63)
j
wobei in diesem Fall, der Kürze wegen, die Projektoren im Heisenbergbild geschrieben und die Zeiten, an denen sie zu nehmen sind, (ausnahmsweise) un(i)
(i)
(i)
terdrückt wurden ( Pjk ≡ P
)). Liegen nun alle Observablen in diesem
(i) (τ
jk,τ0
(i)
(i)
Erwartungswert nach Aj , sodass der Projektor Pjk direkt neben der Dichtematrix liegt, so kann man für solche bedingten Erwartungswerte ρ durch
(i)
ρa(i) ,τ 0 = Pjk U
jk
ersetzen, wobei
(1)
0
(i)
(i)
(i) (i)
τj τ0
(N )
ρU
τ00 = (τ0 , . . . , τj , . . . , τ0 )
(i)†
(i) (i)
τj τ0
(i)
Pjk
(3.64)
ist. In einem Erwartungswert, der
mit der kollabierten Dichtematrix gebildet wird, darf dann keine Observable vor(i)
(i)
kommen, die mit Aj nicht vertauschen und vor dem Zeitpunkt τj liegt. Vergisst
man, woher die Dichtematrix (3.64) kam, unterdrückt also den Index
(i)
ajk ,
so ist
3.3.
37
DER 'HILBERTRAUM AUF DER WELTLINIE'
τ00
die Bedingung, ob eine vor den Zeiten
liegende Messung mit der den Kollaps
verursachenden Messung vertauscht, nicht mehr zu überprüfen und man kann
0
nur noch Erwartungswerte für Messungen nach τ0 berechnen. Eine Präparation
ist genau ein solcher Kollaps, der durch eine Messung von Observablen an jedem
Teilsystem zu den Zeiten
τ0
hervorgerufen wird. Dabei müssen diese Observablen
vollständig sein, die Spektralzerlegung jeder einzelnen dürfen also nur eindimensionale Orthogonalprojektoren enthalten, sodass der kollabierte Zustand durch
(1)
(N )
ρ = ρa(1) ...a(N ) ,τ0 = Pk1 ⊗ . . . ⊗ PN
k1
(3.65)
kN
gegeben ist, und damit unabhängig von einem früheren Zustand ist.
Im Prin-
zip gibt es keinen Grund, warum der kollabierte Zustand unmittelbar nach einer
Messung berechnet werden soll, sodass für eine Präparation nicht nur Zustände
der Form (3.65) in Frage kommen. Mithin kann man durch eine geeignete Wechselwirkung zwischen den Teilsystemen
15
jeden beliebigen Zustand aus einem so
präparierten gewinnen. Man muss sich nur immer darüber im klaren sein, dass
die bloÿe Angabe eines kollabierten Zustandes zu einem Satz von Zeiten nichts
darüber aussagt, wie es zu diesem Zustand gekommen ist und man deswegen
keine Aussagen darüber treen kann, was der Zustand vor diesen Zeiten gewesen
ist.
Es gibt hier eine kleine Falle, die Verwirrung stiften kann. Durch die Mehrdeutigkeit der Ordnung kommutierender Observablen kann man natürlich verschiedene kollabierte Dichtematrizen für das gleiche Experiment bilden
16
. Man
betrachte das Beispiel eines Experiments an einem System mit trivialer Dynamik
(i)
Uτ 0 τ = 1
1
welches aus zwei Spin- -Teilchen besteht, die zur Zeit
2
(3.66)
τ0
in einem EPR-Zustand
1 |EP Ri = √ |+i(1) |−i(2) − |−i(1) |+i(2)
2
(3.67)
(i)
präpariert und anschlieÿend zu den Zeiten τ
beide in z-Richtung vermessen
(i)
(i)
werden. |±i
sind dabei die Eigenzustände der Operatoren σz die zu diesen
(1)
(2)
Messungen korrespondieren. σz
und σz
vertauschen natürlich. Der Erwartungswert für die Messung des Teilchens 1 ist
σz,τ (1)
ρ,τ0
=0
und beider Ergebnisse sind damit gleich wahrscheinlich.
(3.68)
Benutzt man nun die
kollabierte Dichtematrix für den Fall, dass bei der Messung an Teilchen 1 das
Ergebnis
±1
erzielt wurde
(1)
(1)
ρ±1(1) ,τ00 = P±1 ρP±1 = |±i(1) |∓i(2) h∓|(1) h±| ,
15 wie dies zu verstehen ist wird im nächsten Abschnitt erklärt
16 Je nach dem welche Projektoren an die innerste Stelle geschoben werden
(3.69)
38
KAPITEL 3.
QUANTENMECHANIK AUF WELTLINIEN
so erhält man für den bedingten Erwartungswert von
D
(2)
σz,τ (2)
E
ρ±1(1) ,τ 0
(2)
σz
= ∓1
(3.70)
0
und sieht dadurch die perfekten Antikorrelationen, die bei den Messungen auftreten. Man hat damit alles, was es über die Statistik dieses Experimentes zu sagen
gibt berechnet. Wechselt man nun die Reihenfolge der Messungen, so erhält man
für den Erwartungswert
σz(2)
ρ
=0
(3.71)
und kann wieder keine Vorhersage über das Ergebnis der Messung an Teilchen 2
gewinnen. Vermischt man nun beide Sichtweisen, und betrachtet die Ergebnisse
(3.68,3.71) als die gesamte Information, so sind keine Korrelationen mehr zu sehen. Man sollte sich also, wenn man die reduzierte Dichtematrix benutzt, auf eine
Reihenfolge für die kommutierenden Messungen festlegen um nicht versehentlich
verschiedene Reihenfolgen zu vermischen.
3.3.5
Systeme mit Wechselwirkung
Es gibt zwei Arten von Wechselwirkungen für das System auf der Weltlinie. Einerseits ist es möglich, dass die inneren Freiheitsgrade mit der Weltlinie wechselwirken, wie es zum Beispiel an einem polarisierenden Strahlteiler geschieht. Andererseits kann ein Teilsystem auf einer Weltlinie mit einem Teilsystem auf einer
anderen Weltlinie wechselwirken. Der Erste dieser beiden Typen ist ein Problem
für die hier dargestellte Beschreibung, da die Wellenfunktion nach dem Strahlteiler nicht mehr lokalisiert bleibt. Um die Wechselwirkung zwischen Bahn und
inneren Freiheitsgraden korrekt modellieren zu können müsste man die Weltlinie
als einen quantenmechanischen Freiheitsgrad betrachten, der bei der Wechselwirkung mit den inneren Freiheitsgraden verschränkt wird und somit die Weltlinie
des Teilchens nicht mehr als wohl denierte klassische Gröÿe angesehen werden
kann (s. Abb.3.2). Der gesamte Zustandsraum eines derartigen Systems zerele
also in zwei Teile
H = HI ⊗ Hγ ,
den interenen und den Bahnenraum.
Prinzipiell ist dies natürlich problemlos,
aber in Verbindung mit dem hier vorgestellten Formalismus mit lokaler Dynamik
stöÿt man auf mehrere Schwierigkeiten.
Zum einen müsste sich die Dimension
des Bahnenraumes bei einem Strahlteiler verändern, da dort neue mögliche Wege
geschaen werden, die vorher nicht vorhanden waren.
Andererseits wären die
lokalen Zustandsräume, die zu internen Freiheitsgraden auf einer möglichen Bahn
dieses Teilchens gehören, durch
H(i) = HI ⊗ γ (i)
3.3.
39
DER 'HILBERTRAUM AUF DER WELTLINIE'
y
γ1
γ
2
t,x
Abbildung 3.2: Die Situation an einem Strahlteiler. Der schraerte Bereich stellt
den Träger der Wellenfunktion dar, wobei der Ablauf der Zeit nach rechts zu lesen
ist. Natürlich verschwindet die Wellenfunktion nicht auÿerhalb dieses Bereiches
aber sie wird vernachlässigbar klein. Zunächst fällt auf, dass die Wellenfunktion
nach dem Strahlteiler nicht mehr lokalisiert ist. Ist der Strahlteiler polarisierend
−1/2
und der einlaufende Zustand in dessen Basis |ψi = 2
(|↑i + |↓i)⊗ψ(y), so wird
−1/2
dies zu |ψi = 2
(|↑i ⊗ ψ1 (y) + |↓i ⊗ ψ2 (y)) und man kann den Zustandsraum
der inneren Variablen nicht mehr von dem Weltlinien-Raum trennen.
gegeben. Der gesamte Zustandsraum wäre damit eine orthogonale Summe
H=
M
H(i)
i
der lokalen Zustandsräume und nicht wie vorher ein Tensorprodukt, weshalb man
nicht nach dem gleichen Schema, jedem lokalen Zustandsraum eine unabhängige
lokale Dynamik zuordnen kann.
Aus diesem Grund sollen solche Wechselwir-
kungen hier nicht behandelt werden. Dies bedeutet insbesondere, dass Interferometrie in dieser Arbeit durch den benutzten Formalismus ausgeklammert wird.
Allerdings sind die Ausdehnungen realistischer Interferometer so klein, dass man
solche normalerweise konsistent als ein System auf einer Weltlinie behandeln kann
um Eekte auf Dieses durch Gravitation, Beschleunigung, und Rotation zu bestimmen.
Dies ist auch das Ziel der bereits zitierten Arbeit von K. Marzlin
(Marzlin 1999).
Die Wechselwirkung zwischen verschiedenen Systemen ist immer lokaler Natur. Dies bedeutet, dass die Wechselwirkung zwischen Systemen, die sich auf makroskopisch entfernten Weltlinien bewegen, immer vernachlässigt werden kann.
Ist die Raumkrümmung und die Beschleunigungen nicht zu groÿ, so kann man,
bevor eine Wechselwirkung zwischen den Systemen wichtig wird, den Raumzeitbereich, der zur Beschreibung beider Systeme relevant ist, durch ein Fermi-
40
KAPITEL 3.
t
x2
τ3
τ2
τ1
a)
τ1
x2
x1
b)
γ
1
γ2
τ1
QUANTENMECHANIK AUF WELTLINIEN
x1
τ2
x
τ3
τ2
τ3
2
Abbildung 3.3: Von links nach rechts: Der Träger der Wellenfunktion von zwei
Systemen vor, während und nach einer Wechselwirkung a) kompatibel mit Weltlinien b) inkompatibel. Die Koordinatenachsen
xi
repräsentieren den Ortsraum
des i-ten Teilchen. Im ersten Fall (oben) bleibt die Wellenfunktion im Kongurationsraum lokalisiert im zweiten Fall (unten) nicht.
Koordinatensystem überdecken. Aufgrund des Skalenunterschiedes zwischen den
Abständen, für die Wechselwirkungen zwischen Systemen relevant werden (
cm),
∼
und denen, für die eine Beschreibung der Teilsysteme auf verschiedenen
Weltlinien Sinn macht ( ∼
km),
kann man sagen, dass eine Wechselwirkung zwi-
schen Systemen nur dann eintritt, wenn die Weltlinien der Teilsysteme sich treen
(d.h.
sich hinreichend nahe kommen).
Bei dieser Wechselwirkung muss konsi-
stenterweise davon ausgegangen werden, dass die Wellenfunktion anschlieÿend
weiterhin lokalisiert bleibt und kein Strahlteiler-Phänomen auftritt, also weder
jedes System mit seiner eigenen Weltlinie wechselwirkt, noch kreuzweise eine
Wechselwirkung zwischen Weltlinie und inneren Freiheitsgraden auftritt, welche
den Träger der Wellenfunktion zerstückeln könnte (s. Abb. 3.3). Ist diese Bedingung gegeben, so ndet die Wechselwirkung nur noch zwischen den inneren
Freiheitsgraden der Systeme statt und man kann sie folgendermaÿen modellieren: Nähern sich die beiden Teilsysteme einander an, so gibt es ab einem gewissen Zeitpunkt eine Weltlinie, deren Fermi-Koordinatensystem groÿ genug ist,
um den Raumzeit-Bereich der gemeinsamen Wellenfunktion zu überdecken. Da
die Teilsysteme bis zu diesem Zeitpunkt nicht wechselwirken, werden sie wie im
vorhergehenden Abschnitt beschrieben. Man kann dann in das gemeinsame Koordinatensystem wechseln und die Schrödinger-Gleichung des zusammengesetzten
Systems in dem Wechselwirkungsbereich angeben. Trennen sich die Träger der
Wellenfunktionen der beiden Systeme wieder und die Wechselwirkung wird ver-
3.3.
γ
∆τ {
41
DER 'HILBERTRAUM AUF DER WELTLINIE'
γ1
τ
γ2
a)
b)
Wτ(1)τ(2)
c)
Abbildung 3.4: Der schraerte Bereich zeigt die Vereinigung von Wechselwirkungszonenen in der Umgebung jedes Teilsystems. Überlappen sich diese, so ist
die Dynamik der Einzelsysteme nicht mehr unabhängig und man muss das Gesamtsystem in einem gemeinsamen Koordinatensystem beschreiben. Die Bilder
zeigen a) die Transformation von zwei Weltlinien auf Eine.
b) Das Einkleben
der Wechselwirkungsregion c) Ersetzen der Wechselwirkungsregion durch einen
unitären Wechselwirkungsoperator
Wτ (i) τ (j)
(Quanten-Gatter).
nachlässigbar, so kann man wieder auf die Weltlinien der Einzelsysteme zurück
transformieren und kehrt somit wieder zur Beschreibung von unabhängigen Systemen zurück.
Um aus dem einlaufenden Zustand der beiden Systeme auf den AnfangsZustand in den Wechselwirkungskoordinaten zu kommen, muss der Zustand des
Gesamtsystems vor der Wechselwirkung in dieses gemeinsame Koordinatensystem transformiert werden. Normalerweise fallen die gleichzeitigen Hyperächen
(i)
(τ
= konst.) der einlaufenden Weltlinien nicht mit einer gleichzeitigen Hyperäche des gemeinsamen Koordinatensystems zusammen, sodass, um diese Transformation durchführen zu können, der Zustand der Teilsysteme nicht nur zu einem
Zeitpunkt auf den einlaufenden Weltlinien benötigt wird sondern zu einem ganzen
Intervall (s. Abb. 3.4a). Dies stellt jedoch zumindest prinzipiell kein Problem
(i)
dar, da man ja in diesem Bereich die unabhängige Dynamik Uτ 0 τ gegeben hat.
Ein technisches Problem bei dieser Transformation, wenn man in der Darstellung arbeitet, in der der Hamilton-Operator die Pauli-Form (3.29) besitzt,
besteht darin, das die Pauligleichung als nicht relativistische Gleichung kein wohldeniertes Transformationsverhalten unter Lorentztransformationen besitzt. Insbesondere ist völlig unklar was bei einem allgemeinen Wechsel des Vierbeines zu
geschehen hat. Da dieser Hamilton-Operator aber durch eine unitäre und insbesondere invertierbare Foldy-Wouthuysen-Transformation aus der ursprünglichen
Gleichung hervorgegangen ist, kann man die Wellenfunktion, durch Rücktransformation wieder auf die Dirac-Darstellung bringen, für die ein Transformationsver-
42
KAPITEL 3.
QUANTENMECHANIK AUF WELTLINIEN
halten unter Lorentztransformationen deniert ist. Da hier mit mehreren Koordinatensystemen gleichzeitig gearbeitet wird, soll die Transformationsvorschrift
in der Dirac-Darstellung hier noch einmal explizit angegeben werden.
Da die
Dirac-Gleichung eine Wellengleichung im Schrödingerbild ist, werden wir hier die
Kollabierten Wellenfunktionen nach der letzten Messung vor der Wechselwirkung
(1)
(2)
im Schrödingerbild benutzen. Seien also Σ , Σ
die Koordinatensysteme der
Σ das gemeinsame Koordinatensy-
beiden Weltlinien vor der Wechselwirkung und
stem. Die zu den einzelnen Systemen gehörenden Vierbeine seinen entsprechend
(1)
mit nα usw. bezeichnet. Dann gibt es Koordinatentransformationen
xµ
x
(1)
µ(2)
(1)
= xµ (xµ )
= x
µ(2)
(3.72)
µ
(x )
(3.73)
und entsprechend Vierbein-Transformationen
β
(1)
nα = (Λ(1) )−1 α nβ
nα =
(3.74)
β (2)
(Λ(2) )−1 α nβ .
(3.75)
Ein allgemeiner reiner Zustand (und entsprechend die dazugehörigen Dichtematrizen) des Systems aus zwei Teilsystemen mit unabhängigen Koordinatensystemen
ist gegeben durch
ψ (12) (τ (1) , τ (2) , ~x(1) , ~x(2) ) =
X
(1)
(2)
αij (τ (1) , τ (2) )ψi (~x(1) )ψj (x(2) )
(3.76)
ij
wobei
(i)
ψj (~x(i) )
eine orthonormale Basis des lokalen Zustandsraumes ist. In dem
gemeinsamen Koordinatensystem ist dann die Wellenfunktion gegeben durch
ψ(τ, ~x, ~y ) =
X
(1)
(1)
(2)
(2)
αij D(1) (Λ(1) )ψi (xµ (τ ~x))D(2) (Λ(2) )ψj (xµ (τ ~y )),
(3.77)
ij
wobei
D(1)
und
D(2)
die Spinor-Darstellungen der Teilsysteme sind.
Anschlie-
ÿend führt man wieder eine Rücktransformation auf die Pauli-Darstellung in den
neuen Koordinaten durch und erhält so den Zustand des Gesamtsystems bezüglich des gemeinsamen Koordinatensystems
17
. In dieser Form kann man das
Gesamtsystem in der Zeit vorwärts propagieren, bis die Wechselwirkungsterme
in der Zeitentwicklung vernachlässigbar werden und anschlieÿend wieder auf zwei
Weltlinien zurück transformieren. Als Zeitparameter am Anfang der auslaufenden Weltlinien wählt man am geschicktesten den Wert, an dem die einlaufenden
Weltlinien endeten, und zählt die Dauer der Wechselwirkungsphase dazu.
17 Die Impulse der einzelnen Teilsysteme dürfen in diesem Koordinatensystem nicht zu groÿ
sein, wenn die Beschreibung durch eine Pauligleichung adäquat sein soll
3.3.
43
DER 'HILBERTRAUM AUF DER WELTLINIE'
Wenn man sich nicht für die Entwicklung des System-Zustands während der
Wechselwirkungsphase interessiert, so kann man die so bestimmte Wechselwirkung in einem eektiven Wechselwirkungsoperator
Wτ (i) τ (j) ,
einer gemeinsamen,
im Idealfall unitären Transformation auf dem i-ten und dem j -ten Teilsystem,
(i)
(j)
zusammenfassen, wobei τ
und τ
die Bahnparameter des Schnittpunktes (der
Wechselwirkungsregion) sind. Dieser Wechselwirkungsoperator wird in der QIT
auch Quantengatter genannt. Der Propagator, der einen der zu den lokalen Zei(j)
(i)
(i)
ten τ0 und τ0 vor der Wechselwirkung präparierten Zustand, zu Zeiten τ1 und
(j)
τ1 nach der Wechselwirkung bringt, ist dann gegeben durch
U
(ij)
(i) (j)
=U
(i) (j)
(i)
(i)
τ1 τ (i)
(τ1 τ1 )(τ0 τ0 )
Der Wechselwirkungsoperator
U
(j)
(j)
τ1 τ (j)
Wτ (i) τ (j) U
(i)
(i)
τ (i) τ0
U
(j)
(j)
τ (j) τ0
.
(3.78)
W
propagiert also von Zeiten vor der Wechselwir†
kung zu Zeiten nach der Wechselwirkung. Ist W unitär so propagiert W in die
andere Richtung. Dies liefert eine Einschränkung an die Zeitpunkte, die zur Angabe einer Präparation
ρ
des Gesamtsystems gewählt werden können. Will man
(1)
(1)
nämlich den Erwartungswert für eine Observable A
zur Zeit τ1
> τ (1) berech(2)
(1)
nen, falls zu den Zeiten τ0
> τ (2) , τ0 < τ (1) der Zustand ρ präpariert wurde, so
(1)
(1)
berechnen
nach τ1
ist dies nicht möglich, da man, um den Propagator von τ0
(2)
zu können, zuerst die Zeit τ0
vor die Wechselwirkung W zurück propagieren
müsste. Dies ist jedoch nicht möglich, da man dazu den gesamten Zustand nach
der Wechselwirkung kennen müsste, was nicht der Fall ist. Das dies die einzige
Interpretationsmöglichkeit von
W
ist, und die Angabe einer solchen Präparation
keinen Sinn macht, sei an diesem Beispiel illustriert. Gegeben sei ein zweiteiliges
System, die Hilberträume der Teilsysteme haben gleiche Dimension mit Basis
|ii(j) , j ∈ {1, 2}. Die freien lokalen Propagatoren seinen trivial
(i)
Uτ 0 τ = 1
(3.79)
und an einem Schnittpunkt der beiden Weltlinien ndet die Wechselwirkung
Wτ (1) τ (2) =
X
|ii(1) |ji(2)(1) hj|(2) hi|
ij
statt, die den Zustand der beiden Teilsysteme vertauscht (Swap-Gatter). Ist der
Zustand vor der Wechselwirkung (im Schrödingerbild) gegeben durch
(1)
(2)
(1)
(2)
ρτ0 (τ0 , τ0 ) = ρ1 (τ0 ) ⊗ ρ2 (τ0 ),
(i)
τ0 < τ (i) ,
(3.80)
so ist der Zustand nach der Wechselwirkung durch
(1)
(2)
(1)
(2)
ρτ0 (τ1 , τ1 ) = ρ2 (τ1 ) ⊗ ρ1 (τ1 ),
(i)
τ1 > τ (i)
(3.81)
gegeben. Versucht man dagegen als Anfangswert eine Dichtematrix mit gemischten Zeiten anzugeben
(1)
(2)
(1)
(2)
ρτ0 (τ0 , τ0 ) = ρ1 (τ0 ) ⊗ ρ2 (τ0 ),
(1)
(2)
τ0 < τ (1) , τ0 > τ (2) ,
(3.82)
44
KAPITEL 3.
QUANTENMECHANIK AUF WELTLINIEN
W4
W3
W2
W1
γ
1
γ3
γ2
Abbildung 3.5: Wechselwirkende Systeme. Die ausgefüllten Kreise stellen die Bereiche der Wechselwirkung dar, die Kreuze Zeitpunkte auf der Weltlinie. Zeiten,
die durch gestrichelte Linien umlaufen werden sind zulässige Satze von Zeiten.
so stöÿt man auf zwei Probleme.
Zum einen hatten wir aus den Gleichungen
(3.80, 3.81) gelernt, dass die für die reduzierten Dichtematrizen der Teilsysteme
folgende Relation
(1)
(2)
tr2 (ρ(τ0 , τ0 ))
(1)
(1)
(2)
= ρ1 (τ0 ) = tr1 (ρ(τ1 , τ1 )
erfüllt sein müssen und in diesem Fall in Gleichung (3.82)
ρ1 = ρ2
(3.83)
gelten müsste.
Andererseits erfährt man durch diesen Ausdruck nichts über das andere Teilsystem
1
vor bzw.
2
nach der Wechselwirkung.
Aus diesem Grund macht die
Präparation zu den zuletzt angegebenen Zeiten keinen Sinn.
Zusammenfassend stellen wir fest, dass die Wechselwirkung zwischen verschiedenen Systemen die Wahl des Zeiten-Satzes für die Präparation durch die Bedingung einschränkt und dass alle Zeiten zu Weltlinien, die an einer Wechselwirkung
teil nehmen (sich am Wechselwirkungspunkt kreuzen) auf der gleichen Seite dieses
Punktes liegen müssen (s. Abb 3.5)
Kapitel 4
Anwendungen und Beispiele
Nachdem nun das formale Rüstzeug geschaen ist, sollen hier ein paar einfache
Beispiele und Anwendungen besprochen werden.
Eine zentrale Frage, die am
Anfang dieser Arbeit formuliert wurde, besteht darin zu erklären was mit verschränkten Systemen passiert, die sich weit voneinander entfernen. Das ParadeBeispiel für Verschränkung in zweiteiligen Systemen ist das Spin-Singulett. Der
Rahmen für alle folgenden Untersuchungen sei also ein zweiteiliges System. Jeder
(i)
der Teile sei ein Zweizustandssystem H
= C2 . Dies könnte zum Beispiel der
Spin eines Elektrons sein oder zwei ausgewählte Energieniveaus in einem Atom.
Die beiden Teilsysteme benden sich zunächst am selben Ort. Zu diesem Zeitpunkt sind also die lokalen Observablen Observable des Gesamtsystems, sodass
ohne Probleme ein verschränkter Zustand präpariert werden kann. Anschlieÿend
werden die Teilsysteme getrennt und entwickeln sich fortan entsprechend ihrer lo(i)
(i)
(i)
mit Fermi-Walker-Vierbeinen nα ,
kalen Dynamik U
(i) auf den Weltlinien γ
τ (i) τ0
bis sie durch einen Stern-Gerlach-Apparat oder Äquivalentes, welcher die Obser(i)
vablen A
implementiert, analysiert werden, wie das in Abbildung 4.1 dargestellt
ist.
4.1 EPR-Korrelationen für Spins, Bell-Test
Als erstes soll hier betrachtet werden, ob und wie sich EPR-Korrelationen von
1
Spin- -Teilchen in eine Raumzeit mit Gravitation übertragen und wie sich das
2
Argument von Bell (1964) in diesem Zusammenhang darstellt. Die Observablen
A(i) in Abbildung 4.1 sind in diesem Zusammenhang von der Form
A(i) = ~a(i) · ~σ
und korrespondieren zu Messungen, die durch einen Stern-Gerlach-Magneten mit
j (i)
der Orientierung a nj
bewerkstelligt werden können. Wie in der Abbildung
dargestellt, sind die beiden Weltlinien anfangs relativ zueinander in Ruhe. Aus
45
46
KAPITEL 4.
γ
ANWENDUNGEN UND BEISPIELE
(1)
γ
(1) (1)
(τ )
A(2)(τ(2))
A
γ (1)(τ0)= γ (2)(τ0)
Abbildung 4.1:
(2)
(τ )
ρ
Der Prototyp des EPR-artigen Experiments.
System im Zustand
(i)
Observablen A .
ρ,
Präparation des
Trennung der Systeme und Analyse durch die lokalen
1
diesem Grund kann man dort die Vierbeine der beiden Weltlinien identizieren ,
(1)
(2)
sodass dort ein in z-Richtung ( n3 (τ0 ) = n3 (τ0 )) aufgestellter Stern-Gerlach(i)
Apparat, durch den das Teilchen i iegt, die Observable σz implementiert und
das Ergebnis
1
liefert, falls das Teilchen nach oben abgelenkt wurde und
−1
falls
es nach unten abgelenkt wurde. Die Eigenzustände
|↑i(i) , |↓i(i)
dieser Observablen benutzen wir als Basis des Hilbertraumes, sodass man die
üblichen Pauli-Spin-Matrizen für die Operatoren ~
σ (i) erhält. Nun präpariert man
das System zur Zeit
τ0
im Zustand
ρ(τ0 ,τ0 ) = |ψi hψ|
|ψi = |↑i(1) |↓i(2) − |↓i(1) |↑i(2) ≡ |EP Ri
und schickt die beiden Elektronen auf den Weg.
(4.1)
Die Führung auf der Weltli-
nie sei derart, dass keines der Elektron ein magnetisches Feld spürt, sodass der
Hamilton-Operator für den Spin jedes Teilsystems verschwindet und damit der
lokale Propagator durch
(i)
Uτ 0 τ = 1
(4.2)
gegeben ist. Im Schrödingerbild lautet dann die Dichtematrix
ρτ0 (τ (1) , τ (2) ) = ρτ0 .
(4.3)
1 Die Geschwindigkeiten stimmen bereits überein und damit die 0-Richtungen der Vierbeine
und die restlichen Richtungen können ja an einem Punkt auf jeder Bahn frei gewählt werden.
4.2.
DAS EKERT-PROTOKOLL UND PARALLELISIERUNG
47
Dieser Zustand ist, wie im Fall des achen Raumes auch, rotationsinvariant,
was in diesem Fall bedeutet, dass wenn man an beiden Teilsystemen die lokai (j)
len Vierbeine um die Achse a ni
und den Winkel |~
a| dreht, der Zustand die
Transformation
ρ0 = R(~a)ρR† (~a) = ρ
(1)
(2)
iai σi aj σj
R(~a, φ) = e
erfährt, sodass für die Korrelationsfunktion
D
gilt, wobei
(1)
bi σi
bi
·b
j
(2)
σj
E
= tr
ρ
i
(4.5)
2
(1)
(2)
bi σi bj σj ρ
ein beliebiger normierter ( b
(4.4)
= tr σz(1) σz(2) ρ = −1
bi = 1)
(4.6)
Vektor ist und man also perfek-
te Antikorrelationen für Experimente hat in denen die Stern-Gerlach-Magneten
i (j)
der beiden Systeme in b ni -Richtung ausgerichtet sind. Dies führt einen dazu,
in Analogie zum achen Raum und unbeschleunigten Weltlinien, parallele Richtungen für Messungen an beiden Systemen durch Fermi-Walker-Transport von
(1) (1)
dem Messpunkt γ
(τ ) rückwärts entlang der Weltlinie γ (1) bis zum Punkt
γ (1) (τ0 ) = γ (2) (τ0 ) und anschlieÿend vorwärts zum Punkt γ (2) (τ (2) ) zu identizieren. Wir haben bereits gesehen, dass für jedes Paar von so gefundenen parallelen
Richtungen perfekte Korrelationen für Messungen der Spins bestehen. Andei (1)
und
rerseits sind die allgemeineren Korrelationsfunktionen für Richtungen a ni
i (2)
b ni durch
D
gegeben, wobei
θ
(1)
(2)
ai σi · bj σj
E
ρ
= ai bi = cos θ
(4.7)
der Winkel zwischen der Richtung bei Partei 1 und der von 2
nach 1 Fermi-Walker-transportierten Richtung bei 2 ist. Diese Korrelationsfunktion ist aber alles, was benötigt wird um die Voraussetzungen des Bell-Arguments
in der Form von Clauser et al. (1969) zu erfüllen. Es ist damit gezeigt, dass das
bellsche Argument über die Nichtlokalität von Quantentheorien mit verborgenen
Parametern auch in gekrümmten Räumen Gültigkeit besitzt.
4.2 Das Ekert-Protokoll und Parallelisierung
Quanten-Kryptographie-Protokolle, die die Antikorrelationen eines Singulett-Zustandes ausnutzen um einen gemeinsamen zufälligen Schlüssel zu erzeugen (z.B.
Ekert 1991), sind oensichtlich darauf angewiesen die Richtungen zu kennen, bei
welchen diese Antikorrelationen auftreten. Der Aufbau, der für die Ausführung
des Ekert-Protokolls notwendig ist, entspricht exakt dem im vorherigen Abschnitt
2 wegen der trivialen lokalen Dynamik spielen die Zeiten für die Berechnung der Korrelationsfunktionen hier keine Rolle und werden unterdrückt.
48
KAPITEL 4.
ANWENDUNGEN UND BEISPIELE
γ (i) (τ0 )
Beschriebenen. Es werden EPR-Paare bei
erzeugt und die beiden Teilsy-
steme an die Kommunikationspartner verschickt, wo sie analysiert werden.
Das Problem besteht nun darin, dass im Allgemeinen weder die Raumzeitstruktur noch die lokale Dynamik der Systeme bekannt ist. Aufgrund der fehlenden Informationen über die Raumzeitstruktur kann man die von der EPR-Quelle
(i)
Fermi-Walker-transportierten Vierbeine nα im Allgemeinen nicht bestimmen,
(i) (i)
sodass man als lokale Basis bei den Empfängern bei γ (τ ) ein beliebiges loka(i),
les Vierbein nα wählen wird, welches sich im Allgemeinen durch eine räumliche
Rotation von dem ursprünglichen Vierbein unterscheidet
b
(i)−1
n(i),
a nb .
a = R
(4.8)
Damit ergibt sich der Zustand des Systems im Schrödingerbild bezüglich der lokalen Vierbeine bei den Empfängern, aus dem frei propagierten Zustand, welcher
sich auf die Fermi-Walker-Vierbeine bezieht durch
E
0
(1)
(2)
ψτ0 (τ ) = D(1) (R(1) )D(2) (R(2) )Uτ (1) τ0 Uτ (2) τ0 |ψi ,
(4.9)
D(i) die Darstellungen der Drehgruppe für die lokalen Zustandsräume sind
und |ψi der zur Zeit τ0 präparierte Zustand.
Da aber im vorliegenden Fall von Spin- 1/2-Teilchen die Darstellung der lokawobei
3
len Drehgruppe mit der lokalen unitären Gruppe zusammenfällt , kann man die
(i)
Wirkung des Kanals Uτ 0 τ ebenfalls in einer Rotation der Basis am Empfangsort
(i),,
absorbieren, indem man eine Basis na
wählt, sodass
(i)†
D(i) (R(i), ) = Uτ (i) τ0
ist, wobei
R(i),
(i),,
nα
die Rotationsmatrix von
nach
(i)
nα
ist.
Bezüglich dieses
Vierbeines lautet der Zustand des Systems dann
00 (1) (2) ψ (τ , τ ) = |ψi .
(4.10)
Ein mögliches Verfahren zur Bestimmung der Richtungen
(i),,
nα
könnte zum Bei-
spiel darin bestehen, dass der Sender einen Zustand
(1)
|ψ(τ0 , τ0 )i = |↑i
(1)
na
(2)
⊗ |↑i
(2)
na
(4.11)
(i)
zum Eigenwert 1 bezeichnet,
(i) den Eigenzustand zu σa
na
und der jeder Empfänger eine Ausrichtung seines Stern-Gerlach-Apparates sucht,
präpariert, wobei
(i)
|↑i
bei der das ankommende Teilchen mit Sicherheit nach oben abgelenkt wird. Hat
(i),,
er diese Richtung gefunden, so ist dies die korrespondierende Richtung na .
3 genaugenommen SO (3)
irrelevanten globalen Phase
∼ SU(2)/Z2 , aber diese Mehrdeutigkeit äuÿert sich hier nur in einer
4.2.
49
DAS EKERT-PROTOKOLL UND PARALLELISIERUNG
Um die Orientierung des ankommenden Spins exakt bestimmen zu können,
benötigt man oensichtlich (beachte die Formulierung ...mit Sicherheit...
im
vorhergehenden Absatz) ein unendliches Ensemble im Zustand (4.11), welches in
realistischen Situationen nicht zur Verfügung steht. Zur optimalen Übermittlung
4
von Raumrichtungen mit endlichen Ensembles gibt es einige Arbeiten . In diesen
Arbeiten wird davon ausgegangen, daÿ der Sender zur Kodierung der gewünschten
Richtung
N
Teilchen zur Verfügung hat, die er an den Empfänger schicken kann.
Er wird also einen Zustand
|ψxa na i ∈ H⊗N
präparieren, wenn
zu kodieren.
H
(4.12)
der Zustandsraum eines Teilchens ist, um die Richtung
xa
Der Empfänger kann eine verallgemeinerte Messung durchführen,
die durch
O~xα ,
X
O~xα = 1,
(4.13)
α
⊗N
einem positiven operatorwertigen Maÿ (POVM) auf H
beschrieben wird, wobei
a
n
am
Empfänger
zugeordnet
wird. Als Maÿ
die
Richtung
x
dem Ergebnis zu O~
xα
α a
für die Qualität der Dekodierung verwendet man dort die Gröÿe
1
q = (1 + cosθ) = cos2 (θ/2)
2
(4.14)
a
den Winkel zwischen der kodierten Richtung x na und der dekodierten
a
Richtung xα na gibt. In unserem Fall muss die kodierte Richtung natürlich durch
die dazu korrespondierende Richtung am Empfänger ersetzt werden. Im Fall eiwobei
θ
ner trivialen Dynamik also durch die Fermi-Walker-transportierte Richtung. Das
Maÿ
q
wird dann über alle möglichen Richtungen und alle möglichen Dekodie-
rungen gemittelt
hqi =
XZ
1
dΩ (1 + ~n · ~nα )p(Ω)p(~nα |~n)
2
=
XZ
1
dΩ (1 + ~n · ~nα )p(Ω) hψ~n | O~nα |ψ~n i ,
2
α
β
wobei
dΩ
das Raumwinkelelement für die kodierten Richtungen ist und
5
a priori Verteilung dieser Richtungen .
Da
q
(4.15)
p(Ω)
die
ein absolutes Maximum an der
Stelle besitzt, auf die man durch Variation sowohl des kodierenden Zustandes
(4.12) als auch des dekodierenden POVM (4.13) optimieren möchte, genügt es,
den Mittelwert von
q
zu maximieren. Die Ergebnisse dieser Optimierung sind bei
Bagan et al. (2000) angegeben. Man erhält für groÿe
N
ξ
hqimax = cos2 (θ/2) ≈ 1 − 2 .
N
4 s. z.B. Bagan et al. (2000) oder Peres und Scudo (2001)
5 in den zitierten Arbeiten wird p(Ω) = 1/4π gesetzt, also keine a priori Kenntnis über die
Richtungsverteilung angenommen.
50
KAPITEL 4.
wobei
ξ∼1
ANWENDUNGEN UND BEISPIELE
eine Konstante ist.
Die hier beschriebene Vorgehensweise bestimmt für jeden Empfänger ein Vierbein, welches im obigen Sinne parallel zu dem am Sender gegebenen Vierbein ist.
Für das Ekert-Protokoll zur Erzeugung eines zufälligen geheimen Schlüssels ist
die Parallelisierung beider Empfänger mit dem Sender jedoch zu viel Aufwand,
denn dort werden während des eigentlichen Protokolls ausschlieÿlich EPR-Paare
gesendet, die unter einem Wechsel des Koordinatensystems bei dem Sender invariant sind, sodass das Protokoll nicht auf die Angabe eines Sendervierbeines
angewiesen ist.
Vielmehr ist nur bedeutsam, dass die Koordinatensysteme der
beiden Empfänger parallel zueinander sind, sodass die perfekten Antikorrelationen des EPR-Paares sichtbar werden.
Es ist also ausreichend, wenn einer der
Empfänger sich ein Koordinatensystem fest wählt und der zweite Empfänger ein
dazu im Sinne der EPR-Korrelationen paralleles System sucht. Die Honung ist
dann, dass ein optimales Protokoll gefunden werden kann, das dies ermöglicht
und welches eine bessere Konvergenz liefert, weil nur eine der Parteien Fehler bei
der Bestimmung ihres Vierbeines machen kann.
Ein naives Protokoll zur einseitigen Parallelisierung funktioniert so: Der Sender verschickt ein Ensemble von EPR-Paaren. Empfänger 1 wählt eine beliebige
feste Richtung, in der er seinen Stern-Gerlach-Analysator aufstellt und der Empfänger 2 sucht nun die Richtung bezüglich derer die Messergebnisse bei 1 und 2
perfekt antikorreliert sind.
lele Richtung bestimmt.
Hat er diese gefunden, so haben beide eine paralEs ist zu bemerken, dass die beiden Empfänger ihre
Resultate auf Antikorrelationen vergleichen müssen, um erfolgreich zu sein. Dies
ist bei einem sendergestützten Protokoll, wie es vorher beschrieben wurde, nicht
nötig.
Dass dieses Protokoll für ein unendliches Ensemble funktionieren muss ist
klar. Versucht man eine Analyse für endliche Ensembles, nach einem ähnliches
Schema wie bei Peres und Scudo (2001), so muss man folgende Modikationen
vornehmen: Der Zustandsraum für die Präparation durch den Sender ist nun
H = H(1) ⊗ H(2) = C2N ⊗ C2N .
Da aber die Orientierung eines Koordinatensystems am Sender keine Rolle spielen
soll, sollte der gesendete Zustand
|ψi
rotationsinvariant, also ein Spin-Singulett
sein. Nun wird die Partei 1 eine vorher verabredete Messung an seinem Teil des
(1)
Systems vornehmen, die das lokale Vierbein nα kennzeichnen soll und die durch
eine lokales POVM
(1)
Oi ⊗ 1(2) ,
X
(1)
Oi
= 1(1)
beschrieben wird. Entsprechend wird Partei 2 den Ergebnissen einer lokale Messung, die durch das POVM
(2)
1(1) ⊗ Oj ,
X
(2)
Oj = 1(2)
4.3.
51
UHRENSYNCHRONISATION
beschrieben wird. Nachdem die beiden Parteien Ihre Ergebnisse verglichen haben
(1)
wird Partei 2 versuchen, daraus das zu nα entsprechend der EPR-Korrelationen
(2)
korrespondierende Vierbein nα abzuschätzen und sie wird deshalb jedem Paar
von Ergebnissen
(i, j)
der Messungen bei 1 und 2 ein Vierbein
nij (2)
α
(4.16)
zuordnen. Als Maÿ für die Qualität dieser Zuordnung soll
q0 =
X
qa =
a
X1
a
2
(2)
(1 + n(2)
a · nij a )
dienen, welches wieder ein absolutes Maximum besitzt, falls alle drei Winkel
(2)
na · nij (2)
= cosθa verschwinden. Es gilt sodann unter Variation der beiden
a
POVM, des anfangs präparierten Zustands |ψi und der Zuordnung der Vierbeine
0
(4.16) den Mittelwert von q über alle möglichen Messergebnisse und über alle
(2)
Orientierungen des parallelen Vierbeines na
hq i =
XZ
1
dR (1 + R(n0a ) · nij a )p(R)p(i ∧ j| |ψi)
2
=
XZ
1
(1)
(2)
dR (1 + R(n0a ) · nij a )p(R) hψ| Oi ⊗ Oj |ψi
2
0
ija
ija
zu maximieren, wobei
dR
(4.17)
ein geeignetes Maÿ der Drehgruppe SO (3) darstellt.
Dies ist ein völlig anders gelagertes Problem als das aus der Literatur bekannte
und sicherlich eine Untersuchung wert. Im Rahmen dieser Arbeit konnte allerdings keine Lösung gefunden werden.
4.3 Uhrensynchronisation
Ein mit dem Problem der Parallelisierung durch EPR-Paare eng verwandtes Problem ist die Idee der Uhrensynchronisation durch EPR-Paare von Quantenuhren
(Jozsa et al.
2000).
Dabei werden 2-Zustands-Systeme betrachtet, die einen
gegen Störungen durch elektromagnetische Einüsse, Beschleunigungen und Gezeitenkräfte möglichst stabilen lokalen Hamilton-Operator
1
H (i) = (|1i h1| − |0i h0|) = σz(i)
2
2
(4.18)
besitzen, sodass die lokalen Propagatoren durch
(i)
(i)
Uτ 0 τ = e−i 2 σz
(τ 0 −τ )
(4.19)
52
KAPITEL 4.
ANWENDUNGEN UND BEISPIELE
gegeben sind. Im Schrödingerbild ist ein im Zustand
|ψi = |1i + |0i
präpariertes
System, modulo einer globalen Phase, durch
|ψ0 (τ )i = |0i + eiτ |1i
(4.20)
beschrieben. Man kann dann an einem solchen Zustand durch Bestimmung der
iτ
relativen Phasenlage e
die für das System vergangene Eigenzeit ablesen, sodass
es als präzise Uhr dienen kann. In der oben zitierten Arbeit wird das Problem
gestellt, genau gehende klassische Uhren, die sich in einem konstanten Abstand in
einer achen Raumzeit inertial bewegen, zu synchronisieren und dazu der folgende Lösungsweg vorgeschlagen. Wählt man ein Minkowski-Koordinatensystem, in
dem beide Uhren ruhen, so wird man diese beiden Uhren synchronisiert nennen,
falls sie beide zu einer Zeit in diesem Koordinatensystem beide den gleichen Wert
anzeigen. Der Einfachheit halber sei Uhr 1 bereits mit der Koordinatenzeit synchron. Teilen sich diese beiden Uhren ein EPR-Paar von Quantenuhren, welches
in diesem gemeinsamen Koordinatensystem, wo sich das Teilchen 1 ruhend bei
Uhr 1 und das Teilchen 2 ruhend bei Uhr 2 bendet, durch
|ψ(t0 )i = |0i(1) |1i(2) − |1i(1) |0i(2)
(4.21)
gegeben ist, so ist die Zeitentwicklung gegeben durch
|ψ(t)i = Utt0 ⊗ Utt0 |ψ(t0 )i =
= |0i(1) (ei(t−t0 ) |1i(2) ) − (ei(t−t0 ) |1i(1) ) |0i(2) =
= ei(t−t0 ) |ψ(t0 )i ,
(4.22)
und damit dieser Zustand bis auf eine irrelevante globale Phase zeitunabhän0
gig. Nun wird an Teilchen 1 zur lokalen Zeit t0 der Uhr 1 die Observable σx
gemessen, sodass zu diesem Zeitpunkt der Zustand je nach Ergebnis der Messung
(1)
entweder in |+i
|−i(2) oder in |−i(1) |+i(2) projiziert wird. |+i(i) und |−i(i) sind
6 (i)
dabei die Eigenzustände der Observablen σx . Nach dieser Messung ist dann die
Zeitentwicklung des für den zweiten Fall projizierten Zustandes
0
0
ψ(t) = (|0i(1) − ei(t−t0 ) |1i(1) )(|0i(2) + ei(t−t0 ) |1i(2) ),
(4.23)
sodass eine Bestimmung der Phase bei Teilchen 2 zu einem bestimmten Zeitpunkt
gerade die Zeitdierenz zwischen der Messung bei Teilchen 1 und der Messung
bei Teilchen 2 kodiert. Nun muss nur noch eine Nachricht von Uhr 1 an Uhr 2
geschickt werden, zu welcher lokalen Zeit die
σx
Messung mit welchem Ergebnis
0
durchgeführt wurde und Uhr 2 kann entsprechend der empfangenen Zeit t0 und
der Zeitdierenz, die aus der Phase bestimmt wurde, geeicht werden.
6 Rotationsinvarianz des EPR-Zustandes bewirkt, daÿ dieser in der Basis der beiden
Operatoren die gleiche Form behält, weshalb die Projektion einfach ist.
(i)
σx
-
4.3.
53
UHRENSYNCHRONISATION
Im unserem Bild von Quantensystemen auf Weltlinien stellt sich dieses Protokoll nun etwas anders dar. Das Uhren-EPR-Paar wird lokal erzeugt (präpariert)
und anschlieÿend an die beiden entfernten Uhren geschickt. Die Abbildung 4.1
stellt also wieder die Situation korrekt dar. Der Zustand des Systems ist demnach
bei der EPR-Quelle gegeben durch
ψτ0 = |0i(1) |1i(2) − |1i(1) |0i(2) ≡ |EP Ri
(4.24)
Anschlieÿend entwickeln sich die einzelnen Uhren entsprechend ihrer lokalen Uhrendynamik (4.19) so, dass der Zustand im Schrödingerbild durch
ψτ0 (τ (1) , τ (2) ) = ei(τ (2) −τ0 ) |0i(1) |1i(2) − ei(τ (1) −τ0 ) |1i(1) |0i(2)
(2)
(1)
(2)
= ei(τ −τ0 ) |0i(1) |1i(2) − ei(τ −τ ) |1i(1) |0i(2) (4.25)
gegeben ist und (modulo globaler Phase) nur von der Dierenz der Eigenzeiten
abhängt. Dies ist analog zu der Eigenschaft eines Spin-EPR-Paares, nur Informationen über die relative Orientierung der Spins zu tragen. Wird nun an dem
(1)
Teilchen 1 zur Zeit τ0
eine σx -Messung durchgeführt, so lautet der kollabierte
(1)
(1)
Zustand, falls das Ergebnis dieser Messung |+i
oder |−i
war
E
(1)
(2)
(1)
(1)
∓ei(τ0 −τ ) |0i(2) + |1i(2) .
ψ(τ0 , τ (2) ) = |±i
Für Zeiten nach dieser Messung
ψ(τ
(1)
,τ
(2)
(1)
) = |0i
(1)
τ (1) > τ0
(1)
i(τ (1) −τ0 )
±e
gilt dann entsprechend
(1)
|1i
(2)
|0i
(1)
i(τ0 −τ (2) )
∓e
(2)
|1i
,
wobei eine globale Phase unterdrückt wurde. Die Bestimmung der relativen Phase an Teilchen 2 liefert also die Eigenzeitdierenz zwischen den Messpunkten auf
jeder Weltlinie, was wohl am ehesten dem Begri von synchronen Uhren in einer
gekrümmten Raumzeit entspricht.
Es gibt hier jedoch ein entscheidendes Pro-
blem. Es wurde nämlich an keiner Stelle deniert, wie man
Gegensatz zu
σz
σx
zu messen hat. Im
welche durch den Hamilton-Operator der Uhr ausgezeichnet wird
und durch einfache Fluoreszenz-Messung implementiert werden kann, gibt es für
σx und σy
keine kanonische Implementierung und man ist auf eine Konvention an-
gewiesen, welche diese Richtungen bestimmt und die a priori nur lokale Gültigkeit
besitzt. Dies ist äquivalent zu der freien Wahl eines lokalen Koordinatensystems
und damit der Denition von
σa für Spins durch Stern-Gerlach-Apparate, die ent-
lang dieser Koordinatenachsen ausgerichtet werden, nur dass in diesem Fall eine
7
Achse , per Denition die z-Achse durch den Hamilton-Operator ausgezeichnet
wird und nur noch Rotationen um diese Achse möglich sind, die jeder Empfänger
für sich frei wählen kann.
7 Diese Achsen haben nichts mit räumlichen Richtungen zu tun
54
KAPITEL 4.
In der Literatur
8
ANWENDUNGEN UND BEISPIELE
wird dieses Problem als die Frage nach einer gemeinsamen
Phasenkonvention für die Eigenzustände des Hamilton-Operators angesprochen
und bemerkt, dass für eine gemeinsame Konvention bereits synchrone Uhren
notwendig sind (beziehungsweise in unserem Fall die Eigenzeitdierenz bereits
bestimmt sein muss). Dies ist natürlich äquivalent zu der Freiheit einer Wahl der
(i)
(i)
Observablen σx und σy .
Eine interessante Anwendung von EPR-Uhren-Paaren, in der das Problem
der Phasendenition keine Rolle spielt, ist die Bestimmung von Eigenzeitdierenzen von verschiedenen Wegen, wie sie von Hwang et al.
(2000) vorgeschla-
gen wird. Der dort betrachtete Aufbau des Experiments unterscheidet sich von
den bisher in diesem Kapitel betrachteten dadurch, dass sich die Wege zu einem späteren Zeitpunkt wieder treen. Dieser Trepunkt sei gegeben durch
(1)
(2)
γ (1) (τ1 ) = γ (2) (τ1 ) = p. Die Eigenzeiten für diesen Trepunkt werden sich im
(1)
(2)
Allgemeinen unterscheiden τ1
6= τ1 . Auf den Wegen zwischen Anfangs- und
Endpunkt entwickle sich das System nach der freien Dynamik (4.19), sodass der
p gegeben ist durch
E (1)
(2)
(1)
(2)
(1)
(2)
(1)
(2)
.
ψτ0 (τ1 , τ1 ) = |0i |1i − ei(τ1 −τ1 ) |1i |0i
Zustand des Gesamtsystems an diesem Endpunkt
(4.26)
Das Interessante ist nun, dass man auf die beiden Teilsysteme, da sie beide an
der gleichen Stelle lokalisiert sind, ohne Probleme die gleiche Phasendenition
anwenden kann, in dem man beide mit der gleichen Messapparatur untersucht
und ein Wechsel dieser gemeinsamen Phasendenition
(1)
= eiφ |1i(1)
(2)
= eiφ |1i(2)
|1i(1) 7→ |10 i
|1i(2) 7→ |10 i
diesen Zustand invariant lässt. Die in diesem Zustand auftretende Phase ist also
ein exaktes Maÿ für die Dierenz der Eigenzeiten auf den beiden Wegen von
(i)
γ (i) (τ0 ) nach γ (i) (τ1 ) und deren Bestimmung ist unabhängig von der lokalen
Phasendenition, die bei
p
gewählt wird. Der Vorteil dieser Methode gegenüber
|+i(1) |+i(2) präpariert
der, bei der man zwei Uhren in einem Produktzustand
und damit als Ergebnis am zweiten Trepunkt den Zustand
E
(1)
(2)
(1)
(2)
(1)
(1)
(2)
(2)
ψ(τ1 , τ1 ) = (|0i + ei(τ1 −τ0 ) |1i )(|0i + ei(τ1 −τ0 ) |0i )
erhält, ist, dass im ersten Fall nur die Dierenz der Eigenzeiten in dem Zustand
erscheint wohin gegen im zweiten Fall beide Eigenzeiten auftreten. Dieses Schema
der Loops durch die Raumzeit, wo ein Paar von Teilchen ausgehend von einem
Punkt auf zwei verschiedenen Wegen laufen und sich anschlieÿend wieder treen,
ist also geeignet um Informationen über die Geometrie dieses Loops zu gewinnen.
Hier wurden nur Eigenzeitdierenzen bestimmt.
Man kann aber genauso gut
andere Einüsse der Raumzeit, insbesondere die Krümmung, durch einen solchen
Aufbau testen, was in den folgenden Abschnitten beschrieben werden soll.
8 siehe z.B. Preskill (2000) oder Yurtsever und Dowling (2000)
4.4.
55
EFFEKTE DER RAUMZEIT
4.4 Eekte der Raumzeit
In den vorhergehenden Abschnitten ging es im Wesentlichen darum, den Einuÿ
der Gravitation aus Protokollen zur Quantenkommunikation zu eliminieren. Im
Gegensatz dazu soll nun, inspiriert vom letzten Ergebnis des letzten Abschnittes,
der Einuss von Gravitationsfeldern, also der Raumkrümmung, auf Quantensysteme quantitativ untersucht werden.
Als Beispiel wie man den Einuss des
Gravitationsfeldes auf ein Teilchen mit Spin bestimmt, wird zunächst das Elektron in einem kreisförmigen Orbit in einer Schwarzschild-Raumzeit untersucht.
Im zweiten Abschnitt werden ein paar Bemerkungen über ein Gravitometer mit
EPR-Paaren gemacht.
4.4.1
Elektron im Orbit
Das Gravitationsfeld sei also gegeben durch die normale Schwarzschildmetrik
2M
g =− 1−
r
und die Weltlinie
β
dt2 +
1
dr2 + r2 (dθ2 + sin2 θdφ2 )
2M
1− r
sei eine äquatoriale Kreisbahnen ( θ
= π/2)
(4.27)
um das Massen-
zentrum, die in diesen Koordinaten durch
β(τ ) =
parametrisiert ist, wobei
s
1 + r2 ω2
π
τ, r, , ωτ
f
2
f = 1 − 2M/r
!
gesetzt wurde und
schwindigkeit bezüglich des Bahnparameters
τ
ω
die Winkelge-
angibt. Letzterer wurde bereits
so gewählt, dass die Bahngeschwindigkeit
u=
s
1 + r2 ω2 ∂
∂
+ω
f
∂t
∂φ
(4.28)
normiert ist, der Parameter also die Eigenzeit auf der Weltlinie angibt. An dieser
Form sieht man einmal mehr, daÿ es nur Kreisbahnen für
da sonst
f
r ≥ 2M
geben kann,
negativ und die Wurzel imaginär würde. Eine solche Weltlinie ist im
Allgemeinen keine Geodäte. Es gilt insbesondere
M ∂
a = ∇u u = (r − 3M )ω − 2
r
∂r
q
M
was nur auf der Planetenbahn mit ω =
verschwindet.
r 2 (r−3M )
2
im Orbit wird man natürlich die Weltlinie frei fallend ( a
(4.29)
Für das Elektron
= 0)
wählen.
Es ist
aber dennoch interessant, auch beschleunigte Weltlinien zu betrachten, um einige
56
KAPITEL 4.
ANWENDUNGEN UND BEISPIELE
Spezialfälle für den achen Raum berechnen zu können. Wir benötigen nun noch
ein Fermi-Walker-paralleles Vierbein auf dieser Weltlinie um der Wellenfunktion
im Sinne von Kapitel 3 eine invariante Bedeutung zu geben. Gesucht sind also
Vektorfelder auf der Weltlinie
nα (τ )
(4.30)
die orthonormal sind und der Gleichung (2.10) genügen. Schreibt man diese Gleichung auf der gegebenen Weltlinie in Schwarzschildkoordinaten aus und benützt
für die Komponenten der Vierbeinvektoren in diesen Koordinaten Matrixschreibweise, so erhält man die gewöhnliche lineare Dierentialgleichung
γr 2 hω 2
r 3/2 f 3/2
0
dnα
1 γf 1/2 hω 2
= r
dτ
0
0
√
0
0
0
0
0
1 2
γ hω 0
rf
0
1 2
γ hω
r
0
0
nα .
(4.31)
1 + r2 ω2
(Dilatationsfaktor) und h = 1 − 3M/r gesetzt und
nα bezeichnet die Komponentenspalte von nα bezüglich der Koordinatenbasis
∂ ∂
∂
∂
( ∂t
, ∂r , ∂θ
, ∂φ
). Die Bahngeschwindigkeit u ist, wie bereits festgestellt wurde,
Dabei wurde
γ=
immer eine Lösung der Fermi-Walker-Gleichung (2.10) und im vorliegenden Fall
∂
sieht man auch, dass Vektoren der Form n = c
mit c = const Lösungen sind.
∂θ
Wählt man nun auf der Weltlinie ein Vierbein, das diese beiden Vektoren enthält
und zwei dazu orthogonale, also zum Beispiel
b0 = u
∂
∂r
∂
= 1/r
∂θ
γ ∂
rω ∂
+
= √
f ∂t r ∂φ
b1 = f 1/2
b2
b3
(4.32)
und transformiert die Gleichung (4.31) auf diese Basis, was einfach geht da die
Basistransformation weder von
t noch von φ abhängt und somit auf der Weltlinie
konstant ist, so erhält man
0 0
dn0α
0 0
=
0 0
dτ
0 ω0
wobei
Basis
1
0 0
0 −ω 0
n0 ,
0 0 α
0 0
(4.33)
ω 0 = γf − 2 hω ist und n0α die Komponentenspalte von nα bezüglich
bα bezeichnet. Die Lösungen dieser Gleichung lauten oensichtlich
0
0
n0α (τ ) = n0α0
der
4.4.
57
EFFEKTE DER RAUMZEIT
0
0
0
n1α (τ ) = cos(ω 0 τ )n1α0 − sin(ω 0 τ )n3α0
0
0
n2α (τ ) = n2α0
0
0
0
n3α (τ ) = sin(ω 0 τ )n1α0 + cos(ω 0 τ )n3α0 ,
wobei
(4.34)
nα0 das Vierbein am Anfang der Weltlinie, τ = 0 ist und zu nα0 = bα (γ(0))
gewählt werden kann.
Für den Spin eines Elektrons, welches sich auf dieser Weltlinie bewegt gilt, falls
der Spin nicht an andere Freiheitsgrade wie den Ort koppelt, eine gewöhnliche
Schrödingergleichung
i
d
dτ
|ψi = HS |ψi ,
wobei die Wellenfunktion bezüglich des Vierbeines
(4.35)
nα zu verstehen ist.
Es ist nun
noch möglich, anstatt des Fermi-Walker-Vierbeines ein bezüglich der Schwarzschild-Koordinaten zeitunabhängiges Vierbein zu verwenden, da es dann leichter
fällt, die transportierten Zustände miteinander und mit Richtungen relativ zu
Fixsternen zu vergleichen. Dafür bietet sich das Vierbein
bα
an, da es in einem
einfachen Zusammenhang zu dem Fermi-Walker-Vierbein steht. Dies entspricht
der Transformation auf ein rotierendes Bezugssystem, welches mit der Winkelge0
schwindigkeit −ω um die n2 = b2 , die wir die y-Achse nennen wollen, gegenüber
dem Fermi-Walker-System
nα
rotiert.
Transformiert man die Bewegungsglei-
chung auf dieses Bezugssystem, so erhält man
Wirkt kein
Propagator
1 0
1 0
1
H 0 = e−i 2 ω σy τ HS ei 2 ω σy τ + ω 0 σy .
2
Drehmoment auf das Elektron, sodass HS verschwindet,
für das System in bα -Koordinaten
(4.36)
so ist der
i
Uτ 0 τ = exp(− ω 0 (τ 0 − τ ))σy ).
2
(4.37)
Der Spin präzediert also in diesen Koordinaten mit der Winkelgeschwindigkeit
ω0
um die
ω0 =
q
∂
Achse.
∂θ
Für den frei fallenden Spin ( ω
=
q
M
,
r3 h
r > 3M
) gilt
= T = 2πω −1 ) ist der Spin gegenüber
√
∂
der ursprünglichen Richtung um den Winkel 2π h um die
Achse verdreht.
∂θ
Dieser Winkel verschwindet insbesondere nur falls r = 3M , also nur für Licht,
M
und nach einem Umlauf ( τ
r3
was allerdings nicht heiÿt, daÿ der Spin während des Umlaufs immer in die gleiche
0
Richtung gezeigt hat. Denn für diesen Fall ist auch ω identisch Null, sodass sich
der Spin bezüglich des Vierbeines
bα
nicht dreht. Eine radiale Polarisation des
Lichtes wird also auf der gesamten Bahn radial bleiben.
Für niedrigere Geschwindigkeiten (und damit gröÿere Radien) führt jeder Spin
eine Präzessionsbewegung aus, die im Limes
r→∞
den Winkel
2π
pro Umlauf
annimmt, was aufgrund des rotierenden Vierbeines einem Paralleltransport in
Minkowski-Koordinaten entspricht und womit die Präzession verschwindet.
58
KAPITEL 4.
ANWENDUNGEN UND BEISPIELE
Nun sollen noch ein paar Fälle mit beschleunigten Bahnen betrachtet werden.
Bendet sich der Spin stationär in der Raumzeit ( ω = 0) so erfährt er keine
0
Drehung ( ω = 0). Das scheint zunächst natürlich, ist allerdings eine spezielle
Eigenschaft von statischen gravitativen Systemen, d.h. solche für die es ein Koordinatensystem mit zeitunabhängiger Metrik ( gαβ,0
In einem allgemeinen stationären System
g0i 6= 0
=0
) gibt für das gilt
g0i = 0.
präzediert ein stationärer Spin
(Lense-Thirring Eekt).
Ein interessanter Spezialfall ist auch
M = 0,
das heisst die Kreisbahn im
achen Minkowskiraum. In diesem Fall gibt es ein paralleles Minkowski-Koordinatensystem, welches es ermöglicht Spinorientierungen an verschiedenen Punkten
0
zu vergleichen. Es gilt dann ω = γω was nur für ω = 0 mit ω zusammenfällt
und somit nur dann den Spin genau parallel transportiert. Andernfalls präzediert
∂
der Spin einmal pro Umlauf um den Winkel 2π(γ − 1) um die
Achse, was als
∂θ
Thomaspräzession bekannt ist. Fragt man nun danach, wie der Spin verdreht wird
wenn man einem bestimmten Winkel
ψ
auf der Weltlinie durchläuft, so erhält
man, wenn man anstatt der Winkelgeschwindigkeit die Bahngeschwindigkeit v =
1
rω/γ als Parameter verwendet , wodurch γ = √1−v
2 die bekannte Form annimmt
und für τ = ψ/ω setzt
ψ
Uψ = e−iγ 2 σy .
Es ist jedoch zu berücksichtigen, dass das Vierbein
(4.38)
bα
am Ende der Bahn anders
in der Raumzeit orientiert ist als zu Beginn. Die exakte Transformation zwischen
dem Vierbein
bα
am Anfang der Bahn
β(0)
und dem Ende
β(ψ/ω),
welche nur
im achen Raum Sinn macht, wird hier zur Vollständigkeit angegeben
bα |β(ψ/ω)
γ 2 (1 − v 2 cos ψ) γ 2 v(1 − cos ψ)
γ 2 v(1 − cos ψ) γ 2 (cos ψ − v 2 )
=
0
0
γv sin ψ
γ sin ψ
0 γv sin ψ
0 −γ sin ψ
bα |
β(0) .
1
0
0
cos ψ
(4.39)
Um die Ausrichtung des Spins vor und nach dem Kreissegment vergleichen zu
können müssten beide die gleiche Geschwindigkeit besitzen. Dies ist jedoch für
v 6= 0
ist.
und
ψ 6= 2π
nicht der Fall, sodass dies im Allgemeinen nicht möglich
Man könnte natürlich durch einen aktiven Schub an dem Teilchen nach
dem Durchlauf durch das Kreissegment die Geschwindigkeiten angleichen.
Da
allerdings, wie wir an diesem Beispiel noch einmal gesehen haben, der FermiWalker-Transport wegabhängig ist, ist das Transformieren einen Spins durch eine
endliche Lorentztransformation keine wohldenierte Vorschrift und liefert damit
auch keine Aussage von Bedeutung.
Dadurch, dass weder die Transformation des Spins (4.38) noch (4.39) vom
Bahnradius
r
abhängt, ist man versucht, den Limes
r →0
durchzuführen und
somit auch den Transport über einen Knick in der Bahn zu denieren. Dies ist
4.4.
59
EFFEKTE DER RAUMZEIT
allerdings nicht zulässig, da an einem solchen Knick die Beschleunigung unendlich
wird und deshalb das Fermi-Koordinatensystem schon auf der Bahn singulär ist,
die Beschreibung eines Quantensystems also in keinem Fall in Fermi-Koordinaten
geschehen kann.
4.4.2
Gravitometer
Eine Idee, die in dieser Arbeit nur kurz behandelt werden kann, ist das Gravitometer auf der Basis von EPR-Paaren.
der Paralleltransport eines Vektors
X
Es ist eine bekannte Tatsache, dass
auf einem geschlossenen Weg um ein klei-
nes Gebiet in der Raumzeit, welches durch ein Kurvennetz
f (u, v)
beschrieben
wird, mit dem Krümmungstensor in erster Ordung in der Fläche des umlaufenen
Gebietes über die Gleichung
κ σ ∂f
∂f ν
µ
µ
∆X ≡ X − X |P = R νκσ X
∆u∆v
∂u
∂v P
P
µ0 µ
(4.40)
9
verbunden ist . Es ist deswegen naheliegend, Teilchen mit Spin als Richtungsindikator, zu verwenden, um diese Drehung zu bestimmen. Nun kann man allerdings
ein Teilchen nicht einfach auf einem geschlossenen Weg durch die Raumzeit bewegen, da Teilchenbahnen zeitartig sein müssen und Raumzeiten mit geschlossenen
zeitartigen Wegen eher exotisch sind. Allerdings kann man zwei Teilchen, ausgehend von einem gemeinsamen Anfangspunkt, so durch die Raumzeit schicken,
dass sie sich zu einer späteren Zeit wieder treen, wie es in Abbildung 4.2b) dargestellt ist. Da Paralleltransport eine Isometrie ist, bleibt die Relation zwischen
zwei Vierbeinen
n0α |P = Λβ α nβ |P
(4.41)
unter Paralleltransport beider Vierbeine entlang der selben Weltlinie erhalten.
0
Für ein Vierbein nα , welches durch Paralleltransport vom Punkt P ausgehend
auf der geschlossenen Bahn (durchgezogener Pfeil in Abbildung 4.2c) aus
nα
entsteht gilt aufgrund von (4.40)
β
Λ
α
=
δαβ
−R
β
αγδ
∂f
∂u
κ ∂f
∂v
σ ∆u∆v,
wobei der Krümmungstensor in Vierbeinkoordinaten
portiert man nun sowohl das Original
nα
(4.42)
P
nα geschrieben wurde. Transn0α in entge-
als auch das neue Vierbein
gengesetzter Richtung zum Punkt P' (Abbildung 4.2c, gestrichpunktete Pfeile),
so gilt wie vorher argumentiert wegen der Isometrie dieses Transports
n0α |P 0 = Λβ α nβ |P 0 ,
9 s. Sexl und Urbantke (1983) und Abbildung 4.2a)
(4.43)
60
KAPITEL 4.
a)
ANWENDUNGEN UND BEISPIELE
c)
b)
P’
∆v
γ (1)
P’
γ (2)
∆u
=
P
P
X’
P
X
Abbildung 4.2: a) Ein auf einem geschlossenen Weg parallel transportierter Vek0
tor erfährt eine Drehung ∆X = X − X. b) Ein, für Teilchen realistischer, geschlossener Weg:
je ein Teilchen bewegt sich ausgehend von P auf einem der
beiden Äste zu P', wo sie sich wieder treen.
Die gestrichelten Linien reprä-
sentieren den Lichtkegel. c) zur Bestimmung der relativen Lage der links- und
rechtsherum transportierten Vierbeine
was uns also die relative Lage der über
Vierbeine
nα
γ (1)
und über
γ (2)
nach
P0
transportierten
gibt.
Da allerdings der Spin eines Teilchens keine Darstellung der Lorentzgruppe
sondern der Drehgruppe ist und aus diesem Grund nicht parallel sondern FermiWalker-transportiert wird, lässt sich daraus die relative Orientierung von bei P
parallel ausgerichteten Spins am Punkt P' nicht ohne Weiteres bestimmen und
es ist im Rahmen dieser Arbeit auch nicht geglückt, dies zu tun. Es ist jedoch
sehr wahrscheinlich, dass die relative Orientierung der Spins nach dem Transport
(i)
nicht alleine von der Wahl der Wege γ
abhängt, sondern auch Informationen
über die Raumkrümmung enthält.
Deshalb sollen im Folgenden ein paar Be-
merkungen über die Methoden gemacht werden die einem zur Verfügung stehen,
0
um die relative Orientierung der Spins aus dem bei P einlaufenden Zustand zu
extrahieren.
Sind sowohl die Anfangsgeschwindigkeiten am Punkt P als auch die Ge0
schwindigkeiten der beiden Teilchen am Punkt P identisch, so kann man die
(i)
(i)
(i)
Fermi-Walker-Vierbeine nα der beiden Weltlinien γ
am Punkt P = γ (τ0 )
0
(1) (1)
(2) (2)
identizieren. Am Punkt P = γ
(τ ) = γ (τ ) werden diese Vierbeine
im Allgemeinen, bestimmt durch die Form der Bahnen und die Krümmung der
Raumzeit, voneinander abweichen. Diese Abweichung wird durch eine räumliche
Rotation
(1)
b
n(2)
a = R a nb
beschrieben.
(4.44)
Ist die freie Dynamik beider Spins trivial, so ist der Zustand des
Systems im Schrödingerbild bezüglich der lokalen Vierbeine durch
ψτ0 (τ ) = |ψi
4.4.
EFFEKTE DER RAUMZEIT
61
0
der präparierte Zustand ist. Verwendet man bei P für beide
(1)
Teilchen das gleiche Vierbein nα , was natürlich ist, so muss man das zweite
gegeben, wobei
|ψi
Teilsystem auf dieses Vierbein transformieren und erhält
(2)
UR
E
0
(2)
ψτ0 (τ ) = UR |ψi .
(4.45)
kodiert die gesuchte Information über die relative Rotation der beiden Vier-
beine. Diese muss durch eine Messung an dem Gesamtsystem bestimmt werden,
was natürlich bei endlichen Ensembles nur mit einer endlichen Genauigkeit geschehen kann.
Nun kann man sich fragen, was die optimale Strategie ist um
(2)
mit möglichst wenig Resourcen UR zu bestimmen. In einer Arbeit von Acín et
al. (2000) wird genau dieses Problem (ohne den Kontext der Vermessung von
Gravitationsfeldern) behandelt. Es zeigt sich dort, dass im Fall von zwei Spin(2)
1
-Teilchen der beste Zustand, der zur Bestimmung von UR verwendet werden
2
kann, ein maximal verschränkter Zustand ist. Es zeigt sich also, dass auch bei
dieser Aufgabenstellung Verschränkung eine wertvolle Resource sein kann.
62
KAPITEL 4.
ANWENDUNGEN UND BEISPIELE
Literatur
Acín, A., Jané, E. und Vidal, G., Optimal estimation of quantum dynamics ,
quant-ph/0012015 (2000).
Bagan, E., Baig, M., Brey, A. und Munoz-Tapia, R., Optimal encoding and decoding
of a spin direction , quant-ph/0012006 (2000).
Bell, J. S., Physics 1 (1964), 195.
Bennett, C. und Wiesner, S., Physical Review Letters 96 (1992), Nr. 16, 28812884.
Bohm, D., Quantum theory , Prentice-Hall Inc., Englewood Clis, New Jersey, (1951).
Calderbank, A. und Shor, P., Good quantum error correcting codes exist , Physical
Review A 54 (1996), 1098.
Clauser, J. F., Horne, M. A., Shimony, A. und Holt, R. A., Proposed experiment to
test local hidden-variable theories , Physical Review Letters 23 (1969), 880.
Einstein, A., Podolski, B. und Rosen, N., Phys. Rev. 47 (1935), 777.
Ekert, A. K., Quantum cryptography based on bell's theorem , Physical Review
Letters 67 (1991), 661.
Fermi, M., Sopra i fenomeni che avvengono in prossimità di una linea oraria , Atti R.
Accad. Lincei Rend. C1. Sci. Fis. Mat. Nat. 31 (1922), 51.
Fulling, S. A., Aspects of quantum eld theory in curved space time , Cambridge
University Press, Cambridge, 1989.
Herbert, N., FLASH-a superluminal communicator base upon a new kind of quantum
measurement, Foundations of Physics 12 (1982), 1171.
Hwang, W. Y., Ahn, D. D. und Hwang, S. W., Entangled quantum clocks for
measuring proper-time dierence , quant-ph/0012003 (2000).
Jozsa, R., Abrams, D. S., Dowling, J. P. und Williams, C. P., Quantum clock
syncronization base on shared prior entanglement , Physical Review Letters 85
(2000), Nr. 8, 2010.
Kraus, K., States, eects, and operations , Springer, Berlin, Heidelberg, New York,
Tokyo, 1983.
Levi-Cevita, T., Sur l'écart géodésique , Math. Annalen 97 (1927), 291.
Marzlin, K.-P., Der Einuÿ von Trägheit auf die Interferenz von Quantenfeldern ,
Dissertation, Universität, Konstanz, 1999.
Ni, W. T. und Zimmermann, M., Inertial and gravitational eects in the proper
reference frame of an accelerated, rotation observer , Physical Review D 17 (1978),
1473.
Parker, L., One-electron atom as a probe of spacetime curvature , Physical Review D
22 (1980), 1922.
63
Peres, A. und Scudo, P. F., Entangled quantum states as direction indicators , Physical
Review Letters 86 (2001), Nr. 18, quant-ph/0010085.
Preskill, J., Quantum clock synchrionization and quantum error correction ,
quant-ph/0010098 (2000).
Sexl, R. U. und Urbantke, H. K., Gravitation und Kosmologie , Bibliographisches
Institut, Wissenschaftsverlag, Mannheim/Wien/Zurich, 1983.
Shor, P., Algorithms for quantum computation: Discrete log and facroting , in: Proc.
of the 35th Annual Szymposium on the Foundations of computer Science (New
York), IEEE, 1994, S. 124.
Steane, A., Error correcting codes in quantum theory , Physical Review Letters 77
(1996), 793.
von Borzeszkowski, H. und Mensky, M. B., EPR eect in gravitational eld: nature of
non-locality, Phys. Lett. A 269 (2000), 204208, quant-ph/0007085.
Weinberg, S., Gravitation and cosmology , Wiley, New York, 1972.
Wooters, W. und Zurek, W., Nature 299 (1982), 802.
Yurtsever, U. und Dowling, J. P., A lorentz-invariant look at quantum clock
synchronization protocols based on distributed entanglement , quant-ph/0010087
(2000).
Danksagung
An dieser Stelle möchte ich allen danken, die mich bei der Erstellung dieser Arbeit
unterstützt haben.
Mein besonderer Dank gilt Herrn Dr. Hans Briegel für die freundliche Aufnahme in seiner Arbeitsgruppe, sowie für die vielen, sehr fruchtbaren Diskussionen,
interessanten Denkanstöÿe und seine Geduld.
Desweiteren danke ich allen Professoren, Mitarbeitern, Doktoranden und Diplomanden der Abteilung für die angenehme Arbeitsatmosphäre, insbesondere
Herrn Prof. Dr. Herbert Wagner für einige inspirierende Gedanken und Gespräche, Robert Raussendorf für seine kritischen Fragen, als auch meinen Kommilitonen Robert Dahlke und Johannes Martin, welche mir stets mit Rat und Tat zur
Seite standen.
Herrn Prof. Dr. Axel Schenzle danke ich für die Übernahme der Aufgaben
des Erstgutachters sowie Herrn Prof. Dr. Harald Weinfurter, der Zweitgutachter
meiner Arbeit ist.
Zuletzt, dafür aber um so herzlicher, danke ich meiner Freundin Doris Rupp
und meinen Eltern, die mir durch physische (vor allem kulinarische) und psychische Unterstützung überhaupt erst ermöglicht haben, diese Arbeit erfolgreich zu
beenden.
65
66
DANKSAGUNG
Erklärung
Hiermit erkläre ich, dass ich die vorliegende Arbeit selbständig verfasst und keine
anderen als die angegebenen Hilfsmittel und Quellen verwendet habe.
München, den 23. April 2001
Christoph Gohle
67




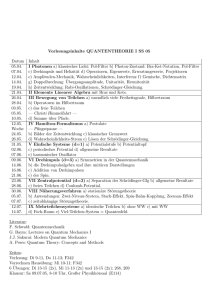
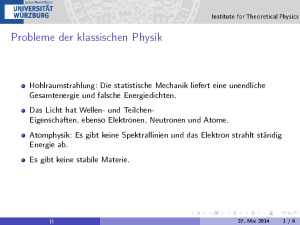



![Teil II: Quantenmechanik 1 Die Wellenfunktion [Griffiths 1.1]](http://s1.studylibde.com/store/data/002959439_1-7465ce5c82bb16d1bd7047f6c3c99749-300x300.png)