Fakultät für Physik und Astronomie Ruprecht-Karls
Werbung

Fakultät für Physik und Astronomie
Ruprecht-Karls-Universität Heidelberg
Bachelorarbeit im Fach Physik
eingereicht von
Stefan Dickopf
geboren in Bad Kreuznach (Deutschland)
2017
Berechnungen zu den Magnetfeldkorrekturspulen
am THe-Trap-Experiment
Diese Bachelorarbeit wurde angefertigt von
Stefan Dickopf
am
Max-Planck-Institut für Kernphysik in Heidelberg
unter der Betreuung von
Prof. Dr. Klaus Blaum und Dr. Jochen Ketter.
Zusammenfassung
Das Tritium-Helium-Trap-Experiment (THe-Trap) am Max-Planck-Institut für Kernphysik in
Heidelberg ist ein Penningfallen-Massenspektrometer, an dem das Massenverhältnis von Tritium zu Helium-3 mit einer relativen Genauigkeit von 10−11 gemessen werden soll. Um Inhomogenitäten erster und zweiter Ordnung des magnetischen Feldes korrigieren zu können, ist
ein Satz von Korrekturspulen an der Außenseite der Fallenkammer verbaut. Die Magnetfelder ausgedehnter Spulen werden theoretisch hergeleitet und mit einer Simulation der Spulengeometrie in COMSOL Multiphysics überprüft. Für die Korrekturspulen werden die Entwicklungskoeffizienten im Zentrum der Präzisionsfalle in Übereinstimmung mit den Designwerten
berechnet. Abweichungen der Koeffizienten werden dominiert durch den Versatz der Spulen
relativ zum Fallenzentrum. Das Magnetfeld der Korrekturspulen wird auf und abseits der Symmetrieachse berechnet, insbesondere werden die Entwicklungskoeffizienten auch im Zentrum
der Speicherfalle bestimmt. Mechanische Einflüsse auf die Korrekturspulen durch das externe
magnetische Feld werden untersucht und als größtenteils ungefährlich für den Aufbau eingestuft. Zuletzt wird eine alternative Korrekturspulenanordnung diskutiert, welche eine bessere
Ortshomogenität der Koeffizienten bietet.
Abstract
The Tritium-Helium-Trap-Experiment (THe-Trap) at the Max-Planck-Institut für Kernphysik
in Heidelberg is a Penning-trap mass spectrometer which aims to measure the mass ratio of
tritium to helium-3 with a relative precision of 10−11 . To correct for inhomogeneities of the
magnetic field a set of correction coils is installed on the trap envelope. The magnetic field of
extended coils is derived theoretically and checked with a simulation of the coil geometry in
COMSOL Multiphysics. The series coefficients at the precision trap center of the correction
coils are calculated in accordance to the design values. Deviations of these components are
dominated by the misalignment of the coils relative to the trap center. The magnetic field is
calculated on and off axis, the series coefficients are in particular also determined in the storage
trap center. Mechanical influences due to the external magnetic fields are investigated and
found to be mostly harmless to the setup. At last an alternative coil geometry, which offers
better spatial homogeneity of the coefficients, is discussed.
Inhaltsverzeichnis
1 Einleitung
1
2 Penningfalle
3
3 Theorie
3.1 Magnetfeld dünner Spulen . . . . . . . . . . . . . . . . . . .
3.2 Magnetfeld ausgedehnter Spulen . . . . . . . . . . . . . . . .
3.3 Parametrisierung des magnetischen Feldes . . . . . . . . . .
3.4 Entwicklungskoeffizienten des magnetischen Feldes . . . . .
3.5 Kraft und Drehmoment auf Spulen im externen Magnetfeld .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
7
7
8
10
11
12
4 Magnetfeldkorrekturspulen bei THe-Trap
4.1 Geometrie der Spulen . . . . . . . . . . . . . . . . . . . . . . . .
4.2 Berechnung der Entwicklungskoeffizienten . . . . . . . . . . . .
4.2.1 Fehlerabschätzungen durch Geometrieungenauigkeiten
4.3 Magnetfeld auf der Symmetrieachse . . . . . . . . . . . . . . . .
4.4 Magnetfeld abseits der Symmetrieachse . . . . . . . . . . . . . .
4.4.1 Berechnung durch numerische Integration . . . . . . . .
4.4.2 Abschätzung für kleine Abstände von der Achse . . . .
4.5 Simulation mit COMSOL Multiphysics . . . . . . . . . . . . . .
4.6 Vergleich mit dünnen Spulen . . . . . . . . . . . . . . . . . . . .
4.7 Mechanische Einflüsse auf die Spulen . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
17
17
20
21
24
26
26
28
29
30
31
.
.
.
.
.
5 Alternative Geometrie für die Korrekturspulen
35
6 Zusammenfassung und Ausblick
39
Literaturverzeichnis
41
Anhang
45
Abbildungsverzeichnis
2.1
2.2
2.3
Hyperbolische Penningfalle . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Zylinderkoordinaten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Ruhelage für verschiedene Spannungen . . . . . . . . . . . . . . . . . . . . . .
4
4
6
3.1
Querschnitt dünner und ausgedehnter Spulen . . . . . . . . . . . . . . . . . .
8
4.1
4.2
4.3
4.4
4.5
4.6
4.7
Aufbau der Korrekturspulen . . . . . . . . . . . . . . . . . . . . . . . .
Abweichungen durch Versatz des Spulenzentrums . . . . . . . . . . . .
B-Feld auf der Symmetrieachse . . . . . . . . . . . . . . . . . . . . . . .
B-Feld der B 2 -Spule abseits der Achse . . . . . . . . . . . . . . . . . . .
B-Feld der B 2 -Spule abseits der Achse: Abweichungen durch Näherung
B-Feld auf der Symmetrieachse: Abweichungen der Simulation . . . . .
B-Feld auf der Symmetrieachse: Vergleich mit dünnen Spulen . . . . .
5.1
5.2
Vergleich der Korrekturspulen mit alternativer Anordnung . . . . . . . . . . .
Abweichungen durch Versatz des Spulenzentrums: alternative Korrekturspulen
38
38
A.1
A.2
A.3
A.4
A.5
A.6
B-Feld der B 1 -Spule abseits der Achse . . . . . . . . . . . . . . . . . . . . . . .
B-Feld der B 1 -Spule abseits der Achse: Abweichungen durch Näherung . . . .
B-Feld der B 1 -Spule abseits der Achse: Simulation . . . . . . . . . . . . . . . .
B-Feld der B 2 -Spule abseits der Achse: Simulation . . . . . . . . . . . . . . . .
B-Feld der supraleitenden Spule abseits der Achse . . . . . . . . . . . . . . . .
Entwicklungskoeffizienten auf der Achse: Vergleich mit alternativer Anordnung
46
47
48
49
50
51
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
19
22
25
27
28
30
31
Tabellenverzeichnis
Allgemeine Lösungen der Maxwellgleichungen für zylindersymmetrische BFelder . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
11
4.1
4.2
4.3
4.4
4.5
Geometrische Daten der Korrekturspulen . . . . . . . . . . . . . . . . . .
Entwicklungskoeffizienten der Korrekturspulen . . . . . . . . . . . . . .
Fehler der Entwicklungskoeffizienten durch Fertigungsungenauigkeiten
Entwicklungskoeffizienten: Vergleich mit dünnen Spulen . . . . . . . . .
Mechanische Einflüsse auf die Spulen . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
18
21
24
31
33
5.1
5.2
Geometrische Daten der alternativen Anordnung . . . . . . . . . . . . . . . .
Entwicklungskoeffizienten: Vergleich mit alternativer Spulenanordnung . . .
36
37
A.1 Entwicklungskoeffizienten der einzelnen Spulen . . . . . . . . . . . . . . . . .
A.2 Magnetfeld des supraleitenden Magneten an den Korrekturspulen . . . . . . .
45
50
3.1
.
.
.
.
.
.
.
.
.
.
1 Einleitung
Die Masse eines Atomkerns setzt sich zusammen aus den Einzelmassen der Konstituenten (Protonen, Neutronen und Elektronen), sowie den Energien derer Wechselwirkungen. Aus der präzisen Messung der Masse eines Atoms lassen sich, vorausgesetzt die Massen der Bestandteile
sind bekannt, Informationen über die an den Wechselwirkungen beteiligten Kräfte extrahieren.
Die Massenspektrometrie befasst sich mit der Aufgabe die Massen von Teilchen in Einheiten
der atomaren Masseneinheit zu messen. In dieser Disziplin hat sich die Penningfalle [1], in
der ein geladenes Teilchen durch Überlagerung eines elektrischen und magnetischen Feldes
gefangen und untersucht werden kann, als eine der besten Optionen bewährt. Mit Penningfallen können die Massen von Ionen mit Genauigkeiten von bis zu δm/m = 10−11 bestimmt
werden [2, 3]. Sie bieten weiterhin die Möglichkeit andere physikalische Eigenschaften der
eingesperrten Teilchen zu untersuchen und Grundlagenforschung zu betreiben. Beispielsweise konnten durch Messung der Lamor-Frequenz in Penningfallen die д-Faktoren gebundener
Elektronen [4], sowie des Protons [5] bestimmt werden.
Das Tritium-Helium-Trap (THe-Trap) Penningfallen-Experiment [6] am Max-Planck-Institut
für Kernphysik in Heidelberg ist aus dem UW-PTMS hervorgegangen [7], welches zuvor in
Seattle betrieben wurde. Der Aufbau besteht aus einer Speicherfalle, in der Ionen einer externen Quelle eingefangen werden, sowie einer Präzisionsfalle, in der die Messungen der Bewegungsfrequenzen durchgeführt werden. Das THe-Trap Experiment soll unter anderem das
Massenverhältnis von Tritium zu Helium-3 mit einer relativen Genauigkeit von 10−11 bestimmen. Daraus lässt sich der Q-Wert des β-Zerfalls von Tritium zu Helium-3 mit einer Präzision
von 30 meV berechnen, was einer Verbesserung der Genauigkeit des aktuellen Wertes von
(m[T] − m[3 He])c 2 = 18592.01(7) eV [8] bedeutet. Am Karlsruhe Tritium Neutrino (KATRIN)
Experiment wird das Energiespektrum des β-Zerfall von Tritium untersucht, um die Masse des
dabei entstehenden Elektron-Antineutrino zu messen oder weiter einzuschränken [9]. Dabei
hilft der Q-Wert die Messergebnisse zu bestätigen und systematische Fehler abzuschätzen [10].
Außerdem soll eine aktuelle Diskrepanz von fast fünf Standardabweichungen in der Massenbestimmung von 3 He geklärt werden [8, 11].
In Penningfallen-Experimenten wird ein homogenes Magnetfeld benötigt. Inhomogenitäten
des Feldes, welche über Ordnungen der Ortsabhängigkeit charakterisiert werden, müssen kompensiert oder angepasst werden [1]. Die Magnetfeldkorrekturspulen von THe-Trap werden in
dieser Arbeit untersucht und einige Vorhersagen zu deren Verhalten getroffen.
Im nächsten Kapitel werden theoretische Grundlagen der Penningfalle kurz ausgeführt, um
eine bessere Motivation für die Notwendigkeit von Magnetfeldkorrekturspulen zu geben. Kapitel 3 widmet sich der allgemeinen Beschreibung von Magnetfeldern, welche von Kreisspulen
erzeugt werden, sowie mechanischen Einflüssen auf Spulen in externen magnetischen Feldern.
Anschließend wird die Theorie in Kapitel 4 auf den Aufbau am THe-Trap Experiment angewandt, um die, für die Korrektur relevanten, Entwicklungskoeffizienten zu berechnen und Fehlerquellen zu diskutieren. Eine Möglichkeit zur Verbesserung des Aufbaus wird schließlich in
Kapitel 5 vorgestellt.
1
2 Penningfalle
Eine Penningfalle (siehe Abbildung 2.1) speichert ein geladenes Teilchen, indem ein homogenes, in axiale Richtung zeigendes Magnetfeld einem elektrostatischem Quadrupolfeld überlagert wird. Das magnetische Feld sperrt das geladene Teilchen in radialer Richtung ein, wogegen
das elektrische Feld die axiale Bewegung einschränkt. Zur Beschreibung der Felder bieten sich
auf Grund derer Symmetrien Zylinderkoordinaten
© ρ cos φ
r (ρ, φ, z) = ­­ ρ sin φ
z
«
ª
®
®
¬
(2.1)
mit den Einheitsvektoren
© cos φ ª
e ρ (φ) = ­­ sin φ ®® ,
« 0 ¬
© − sin φ
e φ (φ) = ­­ cos φ
0
«
ª
®,
®
¬
© 0 ª
e z = ­­ 0 ®®
« 1 ¬
(2.2)
an (siehe Abbildung 2.2). Das homogene, axiale Magnetfeld hat damit die Form:
B = Bz e z .
(2.3)
Das elektrostatische
E wird mit der Spannung U0 , der charakteristischen Falr Quadrupolfeld
2
ρ
lenlänge d = 12 z 02 + 20 (siehe Abbildung 2.1) und dem Quadrupol-Parameter C 2 ≈ 1 beschrieben durch [14]
U0C 2
ρe
−
2ze
.
(2.4)
ρ
z
2d 2
Dass ein geladenes Teilchen in alle drei Raumrichtungen eingesperrt wird, ist mit der Lorentzkraft [15] ersichtlich (es bezeichnen q und v die Ladung beziehungsweise die Geschwindigkeit des Teilchens):
F = q (E + v × B) .
(2.5)
E(ρ, φ, z) =
Einer Bewegung in axialer Richtung wirkt der Term proportional zu e z im elektrischen Feld
entgegen1 und ein sich in radiale Richtung bewegendes Teilchen wird durch das Magnetfeld
auf eine Bewegung in e φ gezwungen2 . Zu beachten ist dabei, dass die Bewegung des Teilchens
durch die radiale Komponente des E-Feldes durch ein ausreichend starkes B-Feld kompensiert
werden muss.
Vorzeichen von U0 muss dabei so gewählt sein, dass die Kraft auf das zu speichernde Teilchen in axialer
Richtung entgegengesetzt zur Bewegungsrichtung ist.
2 Es gilt e × e = −e .
ρ
z
φ
1 Das
3
B
z0
U0
ρ0
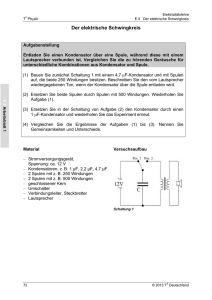
Abbildung 2.1: Elektrodenkonfiguration einer hyperbolischen Penningfalle [12]: Die Elektroden sind so geformt, dass sie den Äquipotentialflächen eines Quadrupolpotentials entsprechen. Es beschreibt z 0 den minimalen Abstand des Zentrums der
Falle zu den Endkappenelektroden (Blau) und ρ 0 den minimalen Abstand des
Zentrums zu der Ringelektrode (Orange). Zwischen Ringelektrode und Endkappen ist eine Spannungsdifferenz U0 . Das magnetische Feld B zeigt parallel zur
z-Achse.
z
ez
r
x
φ
eφ
z
ρ
eρ
y
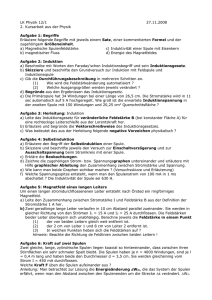
Abbildung 2.2: Zylinderkoordinaten [13]: Der Abstand von der z-Achse ρ, die Höhe z und der
Winkel φ bieten eine alternative Beschreibung von Koordinaten im dreidimensionalen Raum. Die Einheitsvektoren e φ , e ρ und e z stehen an jedem Punkt im
Raum orthonormal aufeinander.
4
Einsetzen des zweiten newtonschen Axioms F = mrÜ (es bezeichnet m die Masse des Teilchens und rÜ die zweite zeitliche Ableitung des Ortes) in Gleichung (2.5) und Lösen dieser Differentialgleichung ergibt drei entkoppelte harmonische Bewegungen. Die axiale Bewegung mit
der Frequenz
r
qU0C 2
ωz =
,
(2.6)
md 2
sowie zwei Bewegungen in der xy-Ebene mit den Kreisfrequenzen [16]
q
1
2
2
ωc ± ωc − 2ωz .
(2.7)
ω± =
2
Es bezeichnet hierbei
ωc =
q
Bz
m
(2.8)
q
die freie Zyklotronfrequenz und m das Ladungs-Masseverhältnis des Teilchens. Ziel der Messung ist es, die Zyklotronfrequenz des eingesperrten Teilchens zu bestimmen, um daraus das
q
Ladungs-Masseverhältnis berechnen zu können. Für die Bestimmung von m durch die Zykloq
tronfrequenz wird eine Referenzmessung eines Teilchens mit bekanntem m benötigt, um so
Bz aus Gleichung (2.8) zu eliminieren. Dazu bietet sich 12 C an, da damit die Masse direkt in
Einheiten der atomaren Masseneinheit u folgert. Im THe-Trap Experiment wird ohnehin nur
ein Verhältnis zweier Massen bestimmt, daher eliminiert sich dort direkt Bz aus Formel (2.8).
Die drei Frequenzen erfüllen zusammen mit der Zyklotronfrequenz durch Gleichung (2.7)
folgende Identitäten:
ωc = ω+ + ω−
ωc2 = ω+2 + ω−2 + ωz2 .
(2.9)
Die zweite Relation ist als Brown-Gabrielse-Invarianztheorem bekannt und sie gilt auch für
den Fall, in dem das magnetische Feld unter einem Winkel zum elektrischen Feld verkippt ist,
sowie für kleine Abweichungen der Zylindersymmetrie des elektrischen Feldes [17]. Es gilt
nun die drei Eigenfrequenzen des Teilchens zu messen, um aus ihnen mit obigen Gleichungen
die Zyklotronfrequenz zu berechnen.
Damit die Abhängigkeit vom Magnetfeld Bz bei der Berechnung des Masseverhältnisses
herausfällt muss es bei beiden Messungen übereinstimmen. Dies setzt zeitliche und (wie sich
gleich herausstellt) räumliche Konstanz des Magnetfeldes voraus. Im Rahmen dieser Arbeit
wird aber nur die auf die räumliche Stabilität eingegangen. Es kann zusätzlich zum Quadrupolfeld andere elektrische Felder ∆E, welche unabhängig vom in der Falle geladenen Ion sind,
in der Falle geben. Diese können sich beispielsweise durch Aufladung, oder durch Einstellen
unterschiedlicher Potentiale der Endkappenelektroden (siehe Abbildung 2.1) aufbauen. Der
Messprozess beinhaltet das Anpassen der axialen Frequenz an die konstante Resonanzfrequenz eines Schwingkreises [7]. Dafür werden für verschiedene Ionen mit unterschiedlichem
Ladungs-Masseverhältnis andere Spannungen U0 benötigt, was zu verschiedenen Quadrupolfeldern führt. Daraus folgert eine Verschiebung der Ruhelage für verschiedene Ionen, wie in
5
E
E
z2
ΔE {
⟶
⟶
z
z1
z
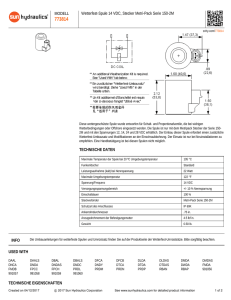
Abbildung 2.3: Axiale E-Feld Komponenten (blau und grün) für verschiedene Spannungen U0
gegen die z-Koordinate (willkürliche Einheiten). Das elektrische Quadrupolfeld
ist proportional zu U0 und z. Wird beispielsweise ein Feld ∆E überlagert, welches zumindest in einem bestimmten Bereich um den Nullpunkt konstant ist,
verschiebt sich die Ruhelage zi des Teilchens, welche über E(zi ) = 0 gegeben
ist (rechts) und ist nicht mehr gleich für verschiedene U0 .
Abbildung 2.3 veranschaulicht ist. Eine Verschiebung der Ruhelage kann sich zu einem Problem
entwickeln, wenn das Magnetfeld eine z-Abhängigkeit hat:
Bz = B 0 + B 1z + B 2z 2 + ... .
(2.10)
Daraus folgt, dass Bz nicht mehr einfach bei der Berechnung des Masseverhältnisses eliminiert
wird. Außerdem führt die B 2 -Komponente zu Frequenzverschiebungen in allen drei Eigenfrequenzen des Teilchens [14], was eine Kompensation nötig macht. Diese Frequenzverschiebungen können allerdings ausgenutzt werden. Die B 2 -Komponente koppelt die Schwingungsmoden des Teilchens und es ist somit möglich deren Frequenzen indirekt über andere Moden zu
messen. Dies wird in der Messmethode der Triggered Sweeps benutzt [11]. Am THe-TrapExperiment soll nun eine andere Messmethode verwendet werden (Pulse and Phase [18])3 , bei
der der intrinsische B 2 -Term der Falle kompensiert werden muss. Beide Methoden profitieren
dann von der Möglichkeit den B 2 -Term über zusätzliche Spulen einstellen zu können.
3 Zuvor
6
wurde hier auch die Methode der Triggered Sweeps verwendet.
3 Theorie
Dieses Kapitel befasst sich zunächst mit der theoretischen Herleitung der Magnetfelder, welche
durch runde Spulen erzeugt werden. Für diese Felder werden anschließend die Entwicklungskoeffizienten berechnet, welche für eine Korrektur der entsprechenden Koeffizienten des externen Magnetfeldes benötigt werden. Zuletzt werden noch mechanische Einflüsse eines externen
Magnetfeldes auf stromdurchflossene Spulen untersucht.
3.1 Magnetfeld dünner Spulen
Das magnetische Feld, welches eine stromdurchflossene kreisförmige Spule erzeugt, besitzt
eine Symmetrie bezüglich Rotation um die Achse der Spule. Daher ist die Wahl von Zylinderkoordinaten, wie sie im vorherigen Kapitel eingeführt wurden (siehe Formel (2.1) und (2.2) und
Abbildung 2.2), zur Beschreibung des Feldes sinnvoll.
Mit Hilfe des Biot-Savart-Gesetzes [15] lässt sich die magnetische Flussdichte, welche durch
die Stromdichte j(r 0) im Vakuum erzeugt wird, am Ort r berechnen:
∫
µ0
r − r0
B(r ) =
.
(3.1)
d3r 0 j(r 0) ×
4π
|r − r 0 | 3
R3
Es bezeichnet hierbei µ 0 = 4π · 10−7 AN2 die Vakuumpermeabilität.
Untersucht wird eine infinitesimal dünne Spule zentriert um die z-Achse bei z s mit Radius r s (veranschaulicht in Abbildung 3.1a)1 . Die Spule hat genau eine Windung und wird vom
Strom I durchflossen. Mit der Dirac’schen δ -Funktion und dem Einheitsvektor e φ lässt sich die
Stromstärke über
j(r ) = δ (ρ − r s )δ (z − z s )Ie φ
(3.2)
ausdrücken.
Durch Einsetzen von Formel (3.2) in (3.1) und der Transformation in Zylinderkoordinaten
lassen sich die Dirac-Funktionen direkt auswerten. Aufgrund der erwarteten Symmetrie des
B-Feldes reicht es aus, das Feld an einem beliebigen Winkel φ zu betrachten. Der Einfachheit
halber wird dieser auf φ = 0 gesetzt. Die Komponenten des B-Feldes erhalten damit folgende
Form:
µ0
B(ρ, z) =
Ir s
4π
1 Die
∫
0
2π
(z − z s ) cos φ 0
©
dφ 0 ­­ (z − z s ) sin φ 0
0
« r s − ρ cos φ
ª 2
® ρ + r 2 − 2ρr s cos φ 0 + (z − z s )2 −3/2 .
s
®
¬
(3.3)
Bezeichnung r s anstatt ρ s wird gewählt, da der Radius eine skalare Größe ist und keine Koordinate.
7
Dieses Integral lässt sich allgemein nur unter Zuhilfenahme von elliptischen Integralen lösen [15]. Von besonderem Interesse ist jedoch das magnetische Feld auf der Symmetrieachse.
Dort fällt durch die Einschränkung ρ = 0 die Abhängigkeit von φ 0 im rechten Term weg, und
das Integral lässt sich einfacher auswerten. Auf der z-Achse kann die einzige nicht verschwindende Komponente des B-Feldes nur die z-Komponente sein, da sonst die Zylindersymmetrie
des Feldes nicht eingehalten wird2 . Für diese ergibt sich nach Integration:
Bz (0, z) =
r s2
µ0
.
I
2 r 2 + (z − z s )2 3/2
s
z
z
🞊
(3.4)
⏟⭕✕
zₛ
●
rₐ
rᵢ
z₁
rₛ
(a) Infinitesimal dünne Spule
z₂
✕
(b) Ausgedehnte Spule
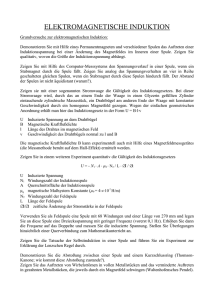
Abbildung 3.1: Querschnitt der betrachteten Spulen: Es steht hierbei der Kreis und das Kreuz
für einen Strom aus der Ebene hinaus beziehungsweise hinein. Links ist die
infinitesimal dünne Spule mit Radius r s zentriert um den Punkt z s gezeigt. In
(b) ist eine Spule mit Ausdehnung z 2 > z 1 in z-Richtung und r a > r i in radialer
Richtung dargestellt.
3.2 Magnetfeld ausgedehnter Spulen
Eine infinitesimal dünne Spule ist nur eine Idealisierung, die sie so in der Realität natürlich
nicht auftritt. Zum einen hat selbst ein einzelner dünner Draht eine endliche Ausdehnung,
zum anderen sollen höhere Feldstärken nicht nur durch höhere Ströme, sondern durch höhere
Windungszahlen erreicht werden. Daher wird nun eine Spule betrachtet, welche einen Innenund Außenradius von r i beziehungsweise r a hat und in z-Richtung von z 1 bis z 2 ausgedehnt ist.
Analog zu Formel (3.2) wird die Stromdichte
j(r ) = Θ(r a − ρ)Θ(ρ − r i )Θ(z 2 − z)Θ(z − z 1 )J0e φ
(3.5)
2 Dies ist auch ersichtlich, wenn das Integral betrachtet wird. Bei der Integration über den 2π -Bereich verschwinden
sowohl Sinus als auch Kosinus.
8
definiert, diesmal mit der Theta-Funktion und der Stromdichte
J0 =
NI
NI
=
.
A
(r a − r i )(z 2 − z 1 )
(3.6)
In Abbildung 3.1b ist dies veranschaulicht. Es bezeichnet A den Querschnitt der Spule und N
die Anzahl der Windungen. Die Theta-Funktionen stehen hier lediglich für die Ausdehnung
der Spulen im Raum, sie werten sich zu eins aus, wenn sich r innerhalb der Spule befindet,
andernfalls zu null. Hierbei wird direkt angenommen, dass die Stromdichte im Inneren der
Spule homogen ist, was aber praktisch nicht realisierbar ist. Zwischen den runden Drähten
gibt es unweigerlich einen stromfreien Zwischenraum. Zusätzlich gibt es Isolationsschichten,
in denen kein Strom fließt. Eine weitere Inhomogenität ist die Auswirkung des starken äußeren Magnetfeldes auf die Stromdichte. Später wird sich bei der Berechnung der magnetischen
Felder der Korrekturspulen herausstellen, dass die Ausdehnung der Spulen keine große Rolle spielt, also können auch Inhomogenitäten in der Stromdichte keine allzu große Bedeutung
haben.
Im Gegensatz zu Gleichung (3.3) können nun die Integrale über ρ und z nicht durch Ausführen von Dirac-Deltas trivial ausgewertet werden. Ist eine Lösung von Formel (3.3) vorhanden,
so kann durch Integration über den Spulenradius und die z-Position die Lösung für den ausgedehnten Fall gefunden werden. Dies ist auch mit dem Superpositionsprinzip vereinbar. Das
Magnetfeld von vielen stromdurchflossenen Drähten addiert sich linear auf, im Grenzfall entspricht das einem Integral über das Volumen der Spule. Eingeschränkt auf die z-Achse ist die
Lösung für dünne Spulen nach Formel (3.4) bekannt. Mit den Substitutionen r s → ρ 0, z s → z 0
und I → J0 ergibt sich das folgende zu lösende Integral:
∫ ra
∫ z2
µ0
ρ 02
0
Bz (0, z) = J0
.
(3.7)
dρ
dz 0
2
ri
z1
(ρ 02 + (z − z 0)2 )3/2
Für die beiden Integrationen über z 0 und ρ 0 wird
sowie
ρ 02
d
z0 − z
=
,
p
dz 0 ρ 02 + (z − z 0)2 (ρ 02 + (z − z 0)2 )3/2
(3.8)
p
d
1
02 + (z − z 0 )2 + ρ 0 = p
ln
ρ
0
dρ
ρ 02 + (z − z 0)2
(3.9)
benutzt. Die komplette Lösung lautet
h
p
i z 0=z2 ρ 0=r a
µ0
0
0
02
0
2
Bz (0, z) = J0 (z − z ) ln ρ + (z − z ) + ρ
.
z 0 =z 1 ρ 0 =r
2
i
(3.10)
Es ist zu beachten, dass sich durch Einsetzen der Grenzen die Dimension Länge im Logarithmus herauskürzt, da bei Subtraktion zweier Logarithmen die beiden Argumente durcheinander
geteilt werden.
9
3.3 Parametrisierung des magnetischen Feldes
Im vorherigen Abschnitt wurde das magnetische Feld einer Spule auf der z-Achse berechnet.
Es stellt sich nun die Frage, warum es nicht auch wichtig ist, das magnetische Feld abseits
der Achse zu wissen. Dazu ist es sinnvoll sich die Maxwellgleichungen in Abwesenheit eines
Stromes j anzuschauen, also im Raum zwischen den Spulen [15]:
∇ · B = 0,
∇ × B = 0.
(3.11)
Die zweite Gleichung impliziert die Existenz eines skalaren Potentials Ψ, für das B = −∇Ψ gilt.
Rückeinsetzen dieser Folgerung in die erste Gleichung führt zu einer Laplace-Gleichung für Ψ:
∆Ψ = 0.
(3.12)
bekannt3 .
Für diese Gleichung ist die Lösung aus der Elektrostatik wohl
Die Lösungen, welche keine Singularitäten besitzen, lassen sich als Polynome schreiben [19]. Über die Bildung
des Gradienten ergeben sich wieder Polynome, welche die Lösungen von Gleichung (3.11) beschreiben. Für ein zylindersymmetrisches Feld
© B ρ (ρ, z) cos φ ª
(3.13)
B(φ, ρ, z) = ­­ B ρ (ρ, z) sin φ ®®
B
(ρ,
z)
z
«
¬
sind es dann Polynome in ρ und z.
Seien P ρ,n die radialen und Pz,n die axialen Lösungen n-ter Ordnung, dann lässt sich ein beliebiges zylindersymmetrisches magnetisches Feld B als Superposition der einzelnen Lösungen
ausdrücken:
∞
Õ
B(φ, ρ, z) =
Bn (P ρ,n (ρ, z)e ρ + Pz,n (ρ, z)e z ).
(3.14)
n=0
In dieser Arbeit werden die B 1 - und B 2 -Komponenten betrachtet. Für diese sind die zugeordneten Polynome in Tabelle 3.1 aufgelistet. Dass diese die Maxwellgleichungen (3.11) erfüllen,
wird klar, wenn sie für den Fall eines zylindersymmetrischen Feldes betrachtet werden. Dadurch vereinfacht sich Gleichung (3.11) zu zwei Bedingungen an die Felder B ρ und Bz :
∂
∂Bz
(ρB ρ ) = −ρ
,
∂ρ
∂z
∂B ρ
∂Bz
=
.
∂z
∂ρ
(3.15)
Es ist leicht nachzuprüfen, dass dies für die angegeben Komponenten erfüllt ist. In jedem Fall
gilt für alle Komponenten Pz,n (0, z) = z n und P ρ,n (0, z) = 0. Dies liefert die notwendige Vereinfachung, welche zeigt, dass das magnetische Feld auf der z-Achse bereits die Information
für das gesamte Feld enthält. Ist das Feld auf der Achse bekannt, so können daraus die Koeffizienten Bn über eine Taylorentwicklung bestimmt werden4 . Hat nun das äußere magnetische
Feld des supraleitenden Magneten auf der z-Achse Inhomogenitäten, so hat es diese auch abseits der Achse. Jedoch werden die Komponenten abseits der Achse durch die Korrekturspulen
dann genauso kompensiert, wie die Komponenten auf der Achse.
3 Ohne
4 Die
10
freie Ladungen erfüllt auch das elektrostatische Potential eine Laplace-Gleichung.
Taylorentwicklung ist ja gerade eine Entwicklung in Potenzen von z.
Tabelle 3.1: Die ersten drei Lösungen der Maxwellgleichung für ein zylindersymmetrisches
Feld in Abwesenheit von Strömen [14]. In den Polynomen der axialen Lösungen
setzt sich die Potenz von z zur n-ten Ordnung fort.
n
0
1
2
Pz,n
1
z
z 2 − 12 ρ 2
P ρ,n
0
− 12 ρ
zρ
3.4 Entwicklungskoeffizienten des magnetischen Feldes
In diesem Abschnitt werden die ersten drei Entwicklungskoeffizienten des B-Feldes auf der
z-Achse berechnet. Dazu werden diese in der Taylorentwicklung um den Punkt z 0
1
B(z) = B(z 0 ) + B 0(z 0 )(z − z 0 ) + B 00(z 0 )(z − z 0 )2 + ...
2
|{z} |{z}
| {z }
B 0 (z 0 )
B 1 (z 0 )
(3.16)
B 2 (z 0 )
identifiziert.
Die Koeffizienten werden nun für die ausgedehnte Spule berechnet. Dazu müssen von Gleichung (3.10) noch die erste und zweite Ableitung bei z 0 ausgewertet werden. Nach der Integration ergeben sich folgende Terme:
p
© r a2 + (z s − z 0 )2 + r a ª
µ0
®,
b0 (J0 , r i , r a , z s ; z 0 ) = J0 (z s − z 0 ) ln ­­ q
(3.17a)
®
2
r i2 + (z s − z 0 )2 + r i
«
¬
p
© r a2 + (z s − z 0 )2 + r a ª
µ 0
ri
ra
® ,
−q
b1 (J0 , r i , r a , z s ; z 0 ) = J0 p
− ln ­­ q
®
2 r a2 + (z s − z 0 )2
2
2
2
2
r i + (z s − z 0 )
r i + (z s − z 0 ) + r i
«
¬
(3.17b)
!
"
µ0
ri
ra
b2 (J0 , r i , r a , z s ; z 0 ) = J0 (z s − z 0 )
3/2 − 2
3/2
4
r 2 + (z s − z 0 )2
r + (z s − z 0 )2
a
1
−
zs − z0
i
©
ª
r
r
i
a
­p
® .
−
q
­ 2
®
r a + (z s − z 0 )2
r i2 + (z s − z 0 )2
«
¬
(3.17c)
Der j-te Koeffizient für die k-te Spule Bk, j berechnet sich mit diesen über
B j,k (z 0 ) = b j (J0,k , r i,k , r a,k , z 1,k ; z 0 ) − b j (J0,k , r i,k , r a,k , z 2,k ; z 0 ).
(3.18)
Zu beachten ist hierbei, dass nur das Argument z s in den beiden Termen verändert wurde.
Für mehrere Spulen addieren sich die Entwicklungskoeffizienten auf Grund des Superpositionsprinzips des magnetischen Feldes. Es können also die Entwicklungskoeffizienten für eine
beliebige Spulenanordnung als Summe über k in Formel (3.18) verstanden werden.
11
Weiterhin bietet es sich an die Entwicklungskoeffizienten einer dünnen Spule zu berechnen.
Dazu werden die Ableitungen von Gleichung (3.4) gebildet:
r s2
µ0
,
I
2 r 2 + (z 0 − z s )2 3/2
s
r s2 (z 0 − z s )
3µ 0
,
B 1 (z 0 ) = −
I
2 r 2 + (z 0 − z s )2 5/2
B 0 (z 0 ) =
(3.19a)
(3.19b)
s
B 2 (z 0 ) =
3µ 0 2 4(z 0 − zs )2 − r s2
.
Ir
4 s r 2 + (z 0 − z s )2 7/2
s
(3.19c)
Im Grenzfall z 2 → z 1 und r i → r a folgen diese Gleichungen aus (3.17), da dies einer Ableitung
nach z entspricht, welche die Integration über ρ und z rückgängig macht5 .
Durch vorhandene Symmetrien der Spulenanordnung können nun direkt Rückschlüsse auf
verschwindende Koeffizienten bei z 0 = 0 in der Taylorentwicklung (3.16) gemacht werden. Ein
Spulenpaar, welches vom selben Strom in gleicher Richtung durchflossen wird, kann aus Symmetriegründen nur gerade Ableitungen6 enthalten. Für entgegengesetzte Ströme ist das Gegenteil der Fall. Dies ist auch in Gleichung (3.17) ersichtlich. Ersetzen von z 2 → −z 1 , z 1 → −z 2 in einer zweiten Spule führt bei gleichem Strom und Richtung zu Auslöschung der B 1 -Komponente,
wogegen sich die B 0 - und B 2 -Komponenten der Spulen jeweils positiv addieren. Daraus erschließt sich, welche Spulenanordnungen für die jeweilige Korrektur in Frage kommen.
3.5 Kraft und Drehmoment auf Spulen im externen Magnetfeld
Die Korrekturspulen sitzen im externen zylindersymmetrischen Magnetfeld des Hauptmagneten. Nach dem Anschalten der Korrekturspulen wird auf diese eine Kraft ausgeübt. Da Falle und
Kompensationsspulen mechanisch verbunden sind, wirkt sich die Kraft auch auf diese aus. Die
Kraft auf eine Stromdichte j(r ) im externen Magnetfeld B(r ) ist gegeben durch [15]
∫
F=
d3r j(r ) × B(r ).
(3.20)
R3
Auf Grund der Zylindersymmetrie wird B(r ) als
© B ρ cos φ
B(φ, ρ, z) = ­­ B ρ sin φ
Bz
«
ª
®
®
¬
(3.21)
geschrieben. Für die Stromdichte j(r ) wird der zuvor definierte Strom (3.5) benutzt.
Im Folgenden wird angenommen, dass sich das magnetische Feld nicht über den Bereich der
Stromdichte der Korrekturspule ändert; B ρ und Bz sind also konstant. Es bezeichnen B ρ und
beachte das im Nenner von J0 noch die Abhängigkeit (r a − r i )(z 2 − z 1 ) enthalten ist.
geraden Ableitungen werden solche bezeichnet, bei denen der Grad der Ableitung gerade ist.
5 Man
6 Mit
12
Bz von nun an diese Komponenten im Zentrum des Spulenquerschnittes. Das Kreuzprodukt
© Bz cos φ ª
j(r ) × B(r ) = j(r ) · e φ ­­ Bz sin φ ®® = j(r ) · e φ (Bz e ρ − B ρ e z )
(3.22)
« −B ρ ¬
zeigt, dass die B ρ Komponente eine Kraft in z-Richtung und die Bz -Komponente des magnetischen Feldes eine Kraft in radiale Richtung bewirkt. Nun ist auch direkt ersichtlich, dass sich
in der Gesamtkraft (3.20) die Komponente in radialer Richtung durch die Integration über den
Winkel zu null mittelt und nur die Komponente in z-Richtung netto beiträgt. Integration und
Einsetzen der Stromdichte (3.6) liefert:
F = −π N I (r a + r i )B ρ e z .
(3.23)
Dennoch ist die Kraftkomponente in radialer Richtung nicht zu vernachlässigen. Sie wirkt je
nach Vorzeichen so, dass die Spule radial gedehnt oder zusammengedrückt wird. Um dies zu
quantifizieren wird der Druck in radialer Richtung betrachtet:
dF ρ
dF ρ
dP ρ
=
=
= j(r ) · e φ Bz .
dρ
dρdA
dV
(3.24)
Das Flächenelement dA ist in diesem Fall jenes in der φz-Ebene, mit dA = ρdφdz. Die ThetaFunktionen im Strom j(r ) sorgen weiterhin dafür, dass der Druck außerhalb der Spulen verschwindet. Obige Formel kann nun aufintegriert werden, um den Druck auf eine bestimmte
Lage in der Spule zu berechnen. Dabei ist zu beachten, dass die Integration je nach Vorzeichen
von IBz von r i bis ρ oder von r a bis ρ ausgeführt werden muss, da die Richtung der Integration
dort beginnen muss, wo der Druck verschwindet. Der Gesamtdruck berechnet sich über die
Integration von Innenradius zu Außenradius7 :
∫ ra
N I Bz
Pρ =
dρ J0 Bz =
.
(3.25)
z2 − z1
ri
Die Spule übt also je nach Vorzeichen von I Bz nach innen oder nach außen Druck aus.
Es ist möglich, dass die Symmetrieachse der Spulen verkippt um einen kleinen Winkel α
zum externen magnetischen Feld steht. Dadurch entsteht ein Drehmoment auf die Spulen. Um
dieses zu berechnen wird das Magnetfeld an der z-Achse gekippt8 , was durch Drehung des
B-Feldes an einer der beiden anderen Achsen realisiert wird. Welche der beiden Achsen dabei
verwendet wird ist nicht relevant, da das Koordinatensystem danach beliebig um die z-Achse
gedreht werden darf. Mit einer geeigneten Rotationsmatrix R(α) wird eine Drehung an der
y-Achse durchgeführt:
© cos α
B̃(φ) = R(α)B(φ) = ­­ 0
«− sin α
0 sin α ª © B ρ cos φ
1
0 ®® ­­ B ρ sin φ
Bz
0 cos α ¬ «
ª © B ρ cos α cos φ + Bz sin α
®=­
B ρ sin φ
® ­
−B
sin
α
cos φ + Bz cos α
ρ
¬ «
ª
®.
®
¬
(3.26)
Theta-Funktionen der z-Variable wurden nicht mehr explizit dazugeschrieben.
stellt sich heraus, dass die andere Vorgehensweise, nämlich die Verkippung der Spulen relativ zur z-Achse zu
einer deutlich schwierigeren Berechnung des Drehmoments führt.
7 Die
8 Es
13
Hier wurde die Annahme gemacht, dass sich der Betrag des magnetische Feldes auch nach
einer Drehung um den Winkel α nicht über den Bereich der Stromdichte ändert9 .
Das Drehmoment auf eine Stromdichte j(r ), welches durch ein magnetisches Feld B(r ) hervorgerufen wird, berechnet sich analog zur Kraft (3.20) über
∫
M=
d3r r × j(r ) × B̃(r ) .
(3.27)
R3
Das Auswerten des Integrals lässt sich deutlich vereinfachen, wenn nach Ausführen der Kreuzprodukte direkt festgestellt wird, dass die meisten Terme bei der 2π -Integration wegfallen. Übrig bleibt nur eine Komponente in y-Richtung (die Drehachse):
∫ ra ∫ z2
M = J0 π sin α
dρ
dz ρ ρBz − zB ρ e y
r
z1
i
1
1
2
2
= N Iπ sin α Bz r a + r ar i + r i − B ρ (z 2 + z 1 )(r a + r i ) e y .
(3.28)
3
4
Im letzten Schritt wurde die Definition der Stromdichte J0 nach Formel (3.6) eingesetzt. Der
letzte Term wird als Drehmoment auf die zentrale Windung der Spule bei 21 (r a +r a ) und 21 (z 2 +z 1 )
identifiziert. Bei der konkreten Berechnung muss darauf geachtet werden, dass der Winkel α
als Drehwinkel für das Magnetfeld definiert wurde, somit entspricht dies einer Verkippung
um −α der Spulen. Das Drehmoment wird also sowohl durch die radiale als auch durch die
axiale Komponente des (ungedrehten) Magnetfeldes erzeugt und verschwindet wie erwartet
für α = 0.
Um das Ergebnis zu überprüfen wird ein Vergleich mit dem Drehmoment auf eine dünne
Kreisspule durch ein verkipptes magnetisches Feld gemacht. Mit dem gegebenen magnetischen
Dipolmoment µ = IAe z einer ebenen, um die z-Achse bei z s = 0 zentrierten, Leiterschleife mit
Fläche A = πr s2 berechnet sich das über die Spule gemittelte Drehmoment durch [15]
1
M=
2π
∫
0
2π
1
dφ µ × B̃ =
µ×
2π
∫
0
= I π Bz r s2 sin αe y .
2π
© Bz sin α
dφ B̃ = µ × ­­
0
« Bz cos α
ª
®
®
¬
(3.29)
Dies entspricht genau dem Fall für r i = r a = r s , z 2 = z 1 = 0 und N = 1 in Formel (3.28).
Die Stabilität des Systems hängt vom Vorzeichen von M/sin(α) ab. Die Beschleunigung des
Drehwinkels α ist proportional zum Drehmoment10 :
M = Θα,
Ü
(3.30)
mit dem Trägheitsmoment Θ. Nach Gleichung (3.28) ist das Drehmoment M auch proportional
zu sin(α) und es bewirkt eine Kraft um die Drehachse. Falls das Vorzeichen von M/sin(α) in
externe magnetische Feld soll ja nach Voraussetzung möglichst homogen sowohl in ρ- als auch z-Richtung
sein.
10 Dies ist das Analogon zu Newtons Bewegungsgleichung F = mxÜ für Drehungen.
9 Das
14
Gleichung (3.28) negativ ist, wird die Lösung von α(t) durch die eines physikalischen Pendels
beschrieben. Die Spule oszilliert dabei um die Ruhelage bei α = 0. Bei positivem Vorzeichen
von M/sin(α) würde sich die Spule komplett umdrehen wollen. Im Realfall ist dies aber durch
die Spulenhalterung nicht möglich.
15
4 Magnetfeldkorrekturspulen bei THe-Trap
In diesem Kapitel werden die Magnetfeldkorrekturspulen am THe-Trap-Experiment am MaxPlanck-Institut für Kernphysik in Heidelberg untersucht. Zunächst wird dabei die Geometrie
der Spulen beschrieben, um mit dieser dann Rechnungen durchzuführen. Die Entwicklungskoeffizienten des magnetischen Feldes werden für diese Anordnung berechnet und einige Fehlerabschätzungen durchgeführt. Das Magnetfeld wird außerdem abseits der Achse berechnet
und die Rechnung durch eine Simulation überprüft. Zuletzt werden mechanische Einflüsse des
Magnetfeldes der supraleitenden Spule auf die Korrekturspulenanordnung untersucht.
4.1 Geometrie der Spulen
Das THe-Trap Experiment basiert auf dem UW-PTMS1 , welches in Seattle betrieben wurde.
Bereits in Seattle wurde das Nachfolgeexperiment erdacht und einige Teile davon entwickelt,
unter anderem die neuen Korrekturspulen2 , welche im Jahr 2005 produziert wurden [20]. Die
Korrekturspulen sind direkt an der Falle verbaut, welche derzeit im Magneten sitzt. Um nun
geometrische Eigenschaften oder die erzeugten Felder nachzumessen, müsste das Experiment
aus dem Flüssighelium genommen werden, sodass das die Falle aus dem Magneten entfernt
werden kann. Die Korrekturspulen anschließend von der Falle zu trennen erfordert Ablöten
von Kabelverbindungen, welche an empfindlichen Stellen sitzen. Daher soll möglichst viel der
vorhandenen Dokumentation entnommen werden, um ein direktes Eingreifen in das Experiment zu vermeiden.
An Dokumentation ist ein ausgedrucktes Mathematica-Notebook vorhanden, welches wahrscheinlich zum Entwurf der Spulen verwendet wurde. In diesem sind geometrische Daten, die
Windungszahlen sowie die Stromflussrichtung der Spulen zu finden und eine Rechnung, in
der die zu erwartenden Entwicklungskoeffizienten berechnet wurden. Eine Nachfrage bei dem
Autor des Mathematica-Notebooks (Steven Leo Zafonte), führte leider zu keinen weiteren Erkenntnissen. Es stellte sich jedoch heraus, dass die angestrebten Windungszahlen nach dem
Wickeln der Spule nicht explizit nachgeprüft wurden. In Laborbucheinträgen wurden noch
einige Details zu den in der Spule verwendeten Drähten und dem Wicklungsverfahren selbst
gefunden. Für die Drähte (American Wire Gauge #34, nomineller Radius: r nom = 0.00631 Inch)
ist eine Dicke (radiale Richtung) von bw = 0.663/90 Inch ≈ 0.00737 Inch, eine Höhe h w =
Ω
0.006725 Inch und ein spezifischer Widerstand R = 0.884 m
angegeben. Die Unterscheidung
zwischen Dicke und Höhe rührt daher, dass zwischen fünf Drahtlagen eine Lage Kaptonfolie
gewickelt wurde. Mit einer technischen Zeichnung, die nach Nachfrage von Robert van Dyck
zur Verfügung gestellt wurde und die Ausfräßungen in der Halterung der Spulen zeigt, konnten
1 University
2 Vorher
of Washington - Penning Trap Mass Spectrometer
handelte es sich um drei Spulen, nun sind es fünf.
17
Tabelle 4.1: Geometrische Daten der 5 Spulen: Die z-Positionen, sowie die Windungszahl N 1
stammen aus dem Mathematica Notebook. Die Angabe in Inch ist auf die amerikanischen Designwerte zurückzuführen. Die Windungszahl N 2 wurde über die
Widerstände R der Drähte berechnet. Dabei wurde auch der pro Lage zunehmende
Radius miteinbezogen. Es bezeichnet L die Länge der Drähte, welche aus den Widerständen berechnet wurde. In Abbildung 4.1b ist die Geometrie graphisch dargestellt.
Spule
1
2
3
4
5
z 1 (Inch)
−1.50
−0.95
−0.25
0.45
1.00
z 2 (Inch)
−1.00
−0.45
0.25
0.95
1.50
N1
2077
2100
1750
2100
2077
N2
2135
2055
1802
2149
2126
R (Ω)
409
392
339
412
407
L (m)
463
443
383
466
460
die Abstände auf der z-Achse in Übereinstimmung mit denen aus dem Mathematica-Notebook
gebracht werden.
In einem Laborbuch wurde eine Widerstandsmessung bei Raumtemperatur gefunden, die
dazu genutzt wurde die Windungszahlen der Korrekturspulen zu überprüfen. Der eigentliche
Rechenweg war aber nicht angegeben. Diese Werte sind jedoch um einen Faktor 3-3.5 kleiner
als die im Mathematica-Notebook beschriebenen Werte. Im Rahmen dieser Arbeit wurde mit
den Widerständen eine neue Rechnung zur Windungszahl durchgeführt, welche Ergebnisse
erzielt, die mit den Designwerten gut übereinstimmen.
In Tabelle 4.1 sind die, für die weiteren Rechnungen relevanten, geometrischen Daten zusammengestellt. Alle Spulen haben einen Innenradius von r i = 1.3 Inch. Der Außenradius ergibt
sich über die Querschnittsfläche A des Drahtes, der Windungszahl N und der Ausdehnung D
der Spule in z-Richtung3 :
NA
Nbwh w
ra = ri +
= ri +
.
(4.1)
D
z2 − z1
In den folgenden Rechnungen werden für die Windungszahlen die Werte aus dem Mathematica-Notebook verwendet, da für die Widerstandsmessungen keine Unsicherheiten angegeben
wurden und sie sich daher schwer mit den Ergebnissen aus dem Mathematica-Notebook vergleichen lassen. Die Berechnung der Windungszahl aus den Widerständen eignet sich jedoch
als gute Bestätigung der Designwerte.
Abbildung 4.1 zeigt den kompletten Aufbau der Korrekturspulen. Spule 2 und 4 werden gegensätzlich vom selben Strom durchflossen. Wie in Kapitel 3.4 beschrieben lässt sich damit eine
B 1 -Korrektur realisieren, bei der das Magnetfeld um den Nullpunkt verschwindet. Durch Spule
1 und 5 fließt der selbe Strom in gleicher Richtung. Dadurch ergeben sich eine nicht verschwindende B 2 -Komponente, jedoch auch ein von null verschiedenes magnetisches Feld. Daher ist
eine weitere Spule nötig (Spule 3), welche durch den entgegengesetzten Strom durchflossen
3 Der
18
Querschnitt wird dabei als Lagen von Drähten betrachet.
wird und so gewickelt wurde, dass sie die entstandene B 0 -Komponente wieder ausgleicht. Es
bezeichnet von jetzt an die B 1 -Korrekturspule die Spulenanordnung aus Spule 2 und 4, sowie
die B 2 -Korrekturspule die Spulenanordnung aus Spule 1, 3 und 54 .
1cm
Spule
5
4
3
B2-Spulen
2
1
(a)
--
-
+
+
+
+
-
-
B1-Spulen
(b)
Abbildung 4.1: Abbildung (a) zeigt, wie die fünf Spulen an die Stromquellen angeschlossen sind.
Die B 1 -Spulen sind schwarz dargestellt und die B 2 -Spulen blau. Die z-Achse
zeigt in diesen Grafiken nach oben. Die B 1 - und B 2 -Korrekturspulen verfügen
jeweils über eine eigene Stromquelle und alle Spulen haben den gleichen Wicklungssinn. Die benötigte relative Stromrichtung (durch die Pfeile dargestellt)
in den einzelnen Spulen wird durch Vertauschung der Anschlussrichtung erreicht. Diese Abbildung wurde einem Laborbuch entnommen [21]. In (b) wird
ein maßstabsgetreuer Querschnitt der Spulen in der ρz-Ebene gezeigt. Das Minuszeichen steht hierbei für negativen Strom in den verwendeten Gleichungen.
Die Fallen [22] wurden für diese Grafik zentriert in den Aufbau gesetzt (ebenfalls maßstabsgetreu). Oben befindet sich die Speicherfalle und unten die Präzisionsfalle [23]. Die Vakuumkammer der Fallen, sowie elektrische Anschlüsse
und Abstandshalter zwischen den Elektroden sind nicht eingezeichnet. Wegen
diesen Teilen können die Korrekturspulen nicht näher an die Fallen gesetzt werden.
4 Wird im Plural von den Korrekturspulen gesprochen, sind die einzelnen Spulen der jeweiligen Anordnung gemeint.
19
4.2 Berechnung der Entwicklungskoeffizienten
Es werden nun, mit der zuvor beschrieben Geometrie jeweils für die B 1 - und B 2 -Korrekturspulen,
die Entwicklungskoeffizienten nach Formel (3.17) bei z 0 = 0 berechnet. Die Stromstärke beträgt
I = 1 mA für die B 1 - und die B 2 -Spulen. Es ist zu beachten, dass die Entwicklungskoeffizienten (und sonst auch fast alle berechneten Größen die mit dem Magnetfeld zusammenhängen)
linear vom Strom abhängen. Daher wird für alle Rechnungen, wenn nicht anders spezifiziert,
ein Strom von I = 1 mA verwendet. Ein Python-Programm wurde im Rahmen dieser Arbeit entwickelt, welches die Koeffizienten für eine gegebene Spulenkonfiguration berechnet.
Sollten sich auf Grund der mangelnden Dokumentation andere Werte für die Geometrie des
Aufbaus herausstellen, so können mit dem Programm die Entwicklungskoeffizienten einfach
neu berechnet werden. Die Ergebnisse werden nun mit den zuvor vorhandenen Werten aus
dem Mathematica-Notebook5 in Tabelle 4.2 verglichen. Dort wird außerdem noch der Wert
der Entwicklungskoeffizienten bei z 0 = 1.695 Inch, was dem Mittelpunkt der Speicherfalle
entspricht [23], gezeigt. In Tabelle A.1 im Anhang sind die Entwicklungskoeffizienten für die
Spulen einzeln aufgelistet. Falls eine Messung Ergebnisse erzeugt, die stark von den erwarteten
Abweichen, kann mit dieser Tabelle zum Beispiel überprüft werden, ob eine Verpolung oder
ein Kurzschluss einer Spule vorliegt.
Die B 0 -Komponente der B 2 -Spule ist ungleich null. Vorher wurde beschrieben, dass Spule 3
entworfen wurde, um den B 0 -Term des Paars aus Spule 1 und 5 zu kompensieren. Dies konnte
aber wohl nicht ideal erreicht werden. Bei der alten Korrekturspulenanordnung wurde nur auf
eine einzelne bei z = 0 zentrierte B 2 -Spule gesetzt, welche daher auch einen B 0 -Term hat. Das
Verhältnis aus B 2 zu B 0 war dort jedoch mit B 2 /B 0 ≈ 3500 m−2 [20] im Vergleich zum Verhältnis
hier mit B 2 /B 0 ≈ 1.6 · 107 m−2 deutlich schlechter.
Es ist ersichtlich, dass die Werte in der Speicherfalle nicht deutlich kleiner sind, als die in der
Präzisionsfalle, vor allem verschwindet die B 0 -Komponente nicht. Die Korrekturspulen wurden
hinsichtlich der Korrektur der Koeffizienten in der Präzisionsfalle entworfen. Ob die Auswirkungen auf die Speicherfalle dabei überhaupt in Betracht gezogen wurden ist fraglich. Die
Speicherfalle sitzt in einem Bereich des Magnetfeldes, das nicht auf Homogenität optimiert
wurde. Um die Auswirkungen der, durch die Korrekturspulen erzeugten, zusätzlichen Inhomogenitäten zu quantifizieren, müsste zunächst die Größe der Inhomogenitäten des externen
Magnetfeldes bekannt sein.
Der intrinsische B 2 -Term im Zentrum der Falle am UW-PTMS betrug beispielsweise B 2 ≈
0.5 T/m2 [24]. Zur vollständigen Kompensation müsste dafür der Strom der B 2 -Spulen auf
etwas über 9 mA gestellt werden. Der B 1 -Term selbiger Falle kann aus [25]6 zu etwa B 1 =
0.14 T/m abgeschätzt werden. Damit wäre also ein B 1 -Strom von etwa 100 mA nötig. Der
Widerstand der B 2 -Spule (die B 1 -Spule ist derzeit wohl nicht angeschlossen) bei 4 K wurde
mit R 4K = 37.92 Ω gemessen, um eine Abschätzung über die dissipierte Leistung zu erhalten.
Das lässt auf ein Restwiderstandsverhältnis der Drähte (vergleiche Tabelle 4.1) von RRR ≈ 30
5 Der Ausdruck des Mathematica-Notebook wurde schon vor einiger Zeit von Martin Höcker digitalisiert und noch-
mals auf Richtigkeit geprüft. Dass diese digitale Version des Notebooks existiert, wurde jedoch erst im Verlaufe
dieser Arbeit klar.
6 Darin ist wohl ein Fehler der Größenordnung in B /B , der sich aber mit Vergleich der Doktorarbeit [26] des
1 0
selbigen Autors auflöst.
20
schließen. Mit den Widerständen der einzelnen Spulen bei 4 K, welche sich durch Teilen der
Widerstandswerte in Tabelle 4.1 durch das RRR ergeben, und P = RI 2 kann die Verlustleistung
abgeschätzt werden. Diese muss mit der pro Watt verlorenen Menge an Flüssighelium von etwa
1.4 l/h (bei THe-Trap wird circa 1.5 l Helium pro Tag verbraucht) verglichen werden.
Tabelle 4.2: Entwicklungskoeffizienten des magnetischen Feldes der beiden Korrekturspulen:
Die mit dem Index Nb gekennzeichneten Werte wurden aus dem MathematicaNotebook genommen. Die unteren Werte wurden über Formel (3.17) berechnet. Die
Entwicklungskoeffizienten in der Präzisionsfalle (Index P) stimmen alle bis auf den
B 1 -Term der B 2 -Korrekturspule mit denen aus dem Notebook überein. Dieser Wert
kann nur durch Ungenauigkeiten der computergestützten Rechnung ungleich null
sein, da die Symmetrie der Anordnung bereits einen verschwindenden B 1 -Term
verlangt. Der Index S kennzeichnet die Entwicklungskoeffizienten im Zentrum der
Speicherfalle. Eine Fehlerabschätzung wird im nächsten Abschnitt durchgeführt.
T 1
1
T 1
Spule
B 0 T mA
B1 m
B
2
2
mA
m mA
B 1,Nb
B 2,Nb
B 1,P
B 2,P
B 1,S
B 2,S
0
−3.776 ·
10−9
0
10−9
−3.776 ·
−1.538 · 10−5
−2.641 · 10−5
−1.729 · 10−3
0
−3
−1.729 · 10
1.409 · 10−18
6.107 · 10−4
4.942 · 10−4
0
−5.856 · 10−2
0
−2
−5.856 · 10
−5.656 · 10−3
−2.432 · 10−2
4.2.1 Fehlerabschätzungen durch Geometrieungenauigkeiten
Um die Entwicklungskoeffizienten gut nutzen zu können, ist eine Fehlerabschätzung vonnöten.
Eine mögliche Fehlerquelle ist der Versatz der gesamten Spulenhalterung relativ zum Fallenzentrum [27]. Die Entwicklungskoeffizienten müssen dafür an anderen Orten z 0 auf der Achse
berechnet werden, was wieder mit Gleichung (3.17) gemacht wird.
Die B 0 -Komponente, welche gerade dem Magnetfeld auf der Achse entspricht, kann mit dem
B 0 -Term des supraleitenden Magneten verglichen werden, der im Zentrum bei etwa 5.7 T liegt.
Die B 1 - und B 2 -Komponenten werden mit den Werten der gesamten Korrekturspulenanordnung bei z 0 = 0 verglichen. In Abbildung 4.2 ist dies dargestellt. Damit ist ersichtlich, dass die
Fehler in den Komponenten B 1 und B 2 , vor allem für kleine z 0 , hauptsächlich durch die jeweils
nicht für die Korrektur der Komponente gedachte Spule dominiert werden. Die B 0 -Komponente
liegt im Bereich von Anteilen in einer Million des Magnetfeldes der supraleitenden Spule. Das
ist bei der Bestimmung der Zyklotronfrequenz ein Problem, da diese direkt von B 0 abhängt (siehe Gleichung (2.8)). Zeitliche Fluktuationen in der Stromquelle der Korrekturspulen übertragen
sich auf deren Magnetfelder und wirken sich somit auf die Zyklotronfrequenz aus.
Angenommen das Ion sitzt an einer bekannten Stelle z 0 , 0 und es soll dort eine bestimmte B 1 - und B 2 -Komponente eingestellt werden. Der Versatz z 0 könnte beispielsweise aus der
B 0 -Komponente, welche durch Messung der Zyklotronfrequenz (nach Gleichung (2.8) ist diese
21
relative Abweichung (%)
40
30
30
20
20
10
10
0
0
−10
−10
−20
−20
−30
−30
−4
−2
0
2
4
−40
−4
−2
0
z₀ (mm)
2
4
z₀ (mm)
(a) B 1 -Komponente
(b) B 2 -Komponente
relative Abweichung (ppm)
1.4
1.2
1
0.8
0.6
0.4
0.2
0
−4
−2
0
2
4
z (mm)
(c) B 0 -Komponente
Abbildung 4.2: Abweichungen der B 1 - und B 2 -Komponenten durch Verschiebung des Nullpunktes. Die y-Achse von (a) und (b) zeigt die relative Abweichung der B 1 (a) beziehungsweise B 2 -Komponente (b) zur jeweiligen Komponente der Gesamtspulenanordnung bei idealer Ausrichtung von z 0 = 0 für die B 1 - (blau)
und B 2 - (grün) Korrekturspulen. Das Vorzeichen gibt hierbei eine Abweichung
in positive beziehungsweise negative Richtung der jeweiligen Komponente an.
Grafik (c) zeigt den Betrag der B 0 -Komponente (selbe Farbcodierung) relativ
zum Magnetfeld der supraleitenden Spule.
22
proportional zu B) eines Ions berechnet wird, bestimmt werden. Nur bei z 0 = 0 ist es möglich
die B 1 - und B 2 -Komponente unabhängig durch die Ströme der beiden Korrekturspulen einzustellen. Es stellt sich also die Frage, ob die Komponenten trotzdem eingestellt werden können,
indem auf unabhängige Ströme der B 1 - und B 2 -Spulen verzichtet wird. Die Spulen sind nach
Abbildung 4.1a so angeordnet, dass nur gleichzeitig der gesamte Strom für die jeweilige Korrekturspulenanordnung geändert werden kann. Jedoch sind die Symmetrien der Spulenanordnung so, dass die B 2 - und B 1 -Spule immer genau gegensätzliche Symmetrie7 besitzen. Ist daher
zum Beispiel eine positive Abweichung von z 0 vorhanden, verstärken sowohl die B 1 -Spulen
als auch die B 2 -Spulen die B 2 -Komponente (siehe Abbildung 4.2). Andererseits passiert das
Gegenteil bei der B 2 -Komponente. Hier verstärken die B 1 -Spulen die Komponente und die B 2 Spulen schwächen sie ab. Eine Erhöhung des Stromes in der B 2 -Spule kann nun den Fehler der
B 2 -Komponente kompensieren. Dadurch nimmt aber der Fehler in der B 1 -Komponente zu, da
mit höherem Strom die, durch die B 2 -Spule, erzeugte Abweichung nach unten zunimmt. Eine
zusätzliche Verringerung des Stromes in der B 1 -Spule kann dies ausgleichen. Dieses Problem
lässt sich allgemein über ein Gleichungssystem für eine Abweichung z 0 lösen. Es bezeichne im
Folgenden Bi die Entwicklungskoeffizienten bei ursprünglichen Strömen I 1 (B 1 -Strom) und I 2
bei z 0 = 0, sowie Bi, j (z 0 ) den i-ten Entwicklungskoeffizienten der j-ten Korrekturspule und I 10
und I 20 die neuen Ströme. Es ist zu beachten, dass die Koeffizienten nach Gleichung (3.17) linear
vom Strom abhängen. Es wird gefordert:
⇔
I 10
I 1 B 1,1 (z 0 )
I 10
I 1 B 2,1 (z 0 )
I0
+ I22 B 1,2 (z 0 ) ª
®
I0
B2
+ I22 B 2,2 (z 0 ) ¬
!
! I0
1
B1
B 1,1 (z 0 ) B 1,2 (z 0 ) © I1 ª
=
­ I0 ® .
2
B 2,1 (z 0 ) B 2,2 (z 0 )
B2
« I2 ¬
B1
!
©
=­
«
(4.2)
(4.3)
Invertieren [28] der auftretenden Matrix liefert:
©
­
«
I 10
I1
I 20
I2
1
B 2,2 −B 1,2
ª
®=
B 1,1 B 2,2 − B 1,2 B 2,1 −B 2,1
B 1,1
¬
!
B1
B2
!
,
(4.4)
wobei im letzten Schritt das Argument z 0 weggelassen wurde.
Eine Kompensierung der B 0 -Komponente ist aber nicht zusätzlich möglich, da die Anpassung
der Ströme nur zwei Freiheitsgrade besitzt. Solange die angepassten Ströme nicht allzu groß
werden, sollte sich die Situation durch die Anpassung der Ströme nicht deutlich verschlechtern,
da B 0 nur linear von Strom abhängt.
Im Folgenden werden nun Fehler der Entwicklungskoeffizienten, welche durch Ungenauigkeiten der Anordnung auftreten, untersucht. Fehlerquellen sind beispielsweise ein Versatz der
Spulen untereinander, sowie variierende Dicken, also im Allgemeinen Schwankungen von z 1
und z 2 der einzelnen Spulen. Diese lassen sich aber schwer unabhängig von der zuvor durchgeführten Fehlerrechnung zur Verschiebung des Spulenzentrums betrachten. Die Fehler der
Entwicklungskoeffizienten durch Versatz der Spulen untereinander sollten in jedem Fall von
7 Damit
ist Symmetrie und Antisymmetrie gemeint.
23
ähnlicher Größenordnung sein wie die Fehler durch den Versatz der gesamten Spulenanordnung. Einen Fehler auf die axiale Dicke der Spulen lässt sich durch Ungenauigkeiten in der
Wicklung der Spulen rechtfertigen. Die Packdichte der Drähte in z-Richtung kann zum Beispiel je nach Spule ein wenig variieren und so zu unterschiedlichen Dicken führen. Um einen
Fehler der Dicke der Spulen miteinzuberechnen, werden die Fehler auf die Werte z 1 und z 2
2
jeweils aus der mittleren Position z1 +z
und der fehlerbehafteten Dicke berechnet. Auch ein
2
Fehler auf den Außenradius folgert daraus, da sich dieser nach Gleichung (4.1) über die Dicke
berechnet. Es wird nun ein Fehler von ∆D = 0.1 Inch angenommen. Die Genauigkeit durch
die Fertigung der Halterung wurde mit 0.01 Inch angegeben und sollte daher im Vergleich zum
Fehler durch das Wicklungsverfahren nicht groß sein.
In Tabelle 4.3 sind die berechneten Werte aufgelistet. Dort ist zu erkennen, dass die Fehler auf
die B 0 -Komponente kleiner als µT und die Fehler auf die B 1 und B 2 -Komponenten zwei Größenordnungen kleiner als die ursprünglich von null verschiedenen Komponenten sind. Das
Verhältnis von B 2 zu B 0 ist selbst für den schlechtesten Fall mit B 2 /B 0 ≈ 1.4 · 105 m−2 noch
deutlich besser als in der alten Anordnung. Im Vergleich zum Fehler durch den Versatz des
Spulenmittelpunkts (siehe Abbildung 4.2) ist das nur ein kleiner Anteil. Ein Fehler im Prozentbereich auf die B 1 - und B 2 -Komponente ist dort schon für einen Versatz von deutlich weniger
als 1 mm erreicht. Diese relativ kleinen Fehler werden nochmals bestätigt, wenn die Auswirkung der Ausdehnung der Spulen in Abschnitt 4.6 diskutiert wird.
Tabelle 4.3: Fehler der Entwicklungskoeffizienten für ∆D = 0.1 Inch. Für die Fehlerrechnung
wurde eine lineare Fehlerapproximation genutzt. Diese wurde mit einem Python
Modul [29] und dem vorhandenen Code umgesetzt. Die Fehler der Koeffizienten
werden zunächst für jede Spule einzeln berechnet und dann quadratisch addiert.
1
T 1
T 1
Spule
B 0 T mA
B1 m
B
2
2
mA
m mA
B1
B2
(0.000 ± 2.367) · 10−7
(−0.038 ± 4.261) · 10−7
(−1.729 ± 0.038) · 10−3
(0.000 ± 1.126) · 10−5
(0.000 ± 9.799) · 10−4
(−5.856 ± 0.177) · 10−2
4.3 Magnetfeld auf der Symmetrieachse
Eine Betrachtung des Magnetfeldes auf der z-Achse ist nötig. Wichtig ist es zu wissen, wie
stark das Magnetfeld im Bereich der Speicherfalle ist, in dem es Inhomogenitäten erzeugen
wird. Außerdem kann nun die Taylor-Entwicklung mit den drei Komponenten B 0 , B 1 , B 2 mit
der analytischen Lösung des Magnetfeldes verglichen werden.
In Abbildung 4.3 ist dies dargestellt. Die Entwicklung um den Nullpunkt bei beiden Spulen
ist etwa bis zu z = ±10 mm genau. Die Felder sind in der Speicherfalle noch nicht nahe null
abgefallen, sondern eher relativ nah an ihrem Maximum.
24
0
40
−10
B (μT)
20
−20
0
−30
−20
−40
−40
−60
−40
−20
0
20
40
60
−50
−60
−40
−20
0
20
40
60
5
10
15
z (mm)
z (mm)
0
B (μT)
20
−2
10
−4
0
−6
−8
−10
−10
−20
−12
−15
−10
−5
0
z (mm)
(a) B 1 -Spule
5
10
15
−15
−10
−5
0
z (mm)
(b) B 2 -Spule
Abbildung 4.3: Magnetisches Feld der beiden Korrekturspulenanordnungen auf der Symmetrieachse bei Strömen von I = 1 mA. Der blaue Graph zeigt die analytische
Berechnung des magnetischen Feldes, der grüne Graph die Näherung über die
Taylorentwicklung um z 0 = 0 bis zu zweiter Ordnung. Bei z ≈ 43 mm befindet
sich das Zentrum der Speicherfalle.
25
4.4 Magnetfeld abseits der Symmetrieachse
Ein Versatz des Spulenzentrum in radialer Richtung gegenüber dem Fallenzentrum führt zu
einer Änderung der Bz -Komponente, sowie zu einer nicht verschwindenden B ρ -Komponente
des magnetischen Feldes an der Position des Ions.
4.4.1 Berechnung durch numerische Integration
Bei der analytischen Herleitung des magnetischen Feldes einer dünnen Spule wurde nur der
Fall auf der z-Achse betrachtet, da sich das in Gleichung (3.3) auftretende Integral sonst nicht
elementar lösen lässt. Mit den Ausdrücken für die, numerisch zu berechnenden, elliptischen
Integrale K(k 2 ) und E(k 2 ) lassen sich die Komponenten des zylindersymmetrischen magnetischen Feldes (vergleiche Formel (3.13)) ausdrücken durch [30]
µ 0I
1
Bz (ρ, z) =
q
2π
(r s + ρ)2 + (z − z s )2
K(k ) +
r s2 − ρ 2 − (z − z s )2
E(k ) ,
(4.5a)
r s2 + ρ 2 + (z − z s )2
µ 0I
z − zs
2
2
B ρ (ρ, z) =
E(k ) ,
−K(k ) +
q
2
2
2π ρ
(r
(z
)
−
ρ)
+
−
z
2
2
s
s
(r s + ρ) + (z − z s )
(4.5b)
mit
k2 =
2
(r s − ρ)2 + (z − z s )2
4r s ρ
(r s + ρ) + (z − z s )2
2
2
.
(4.6)
Diese Gleichungen führen nun mit der Substition I → J0 und numerischer Integration über r s
sowie z s zum Magnetfeld einer ausgedehnten Spule. Alternativ kann Gleichung (3.3) numerisch
über den Winkel φ 0 integriert und auf die zuvor gezeigt Darstellung verzichtet werden8 .
Die numerische Integration sowie die Berechnung der elliptischen Integrale wurde mit der
Python Bibliothek Scipy [31] in Version 0.18.1 durchgeführt. In Abbildung 4.4 werden die berechneten Komponenten beispielhaft für die B 2 -Spule gezeigt (B 1 -Spule siehe Abbildung A.1
im Anhang). Die Bz -Komponente erfährt in radiale Richtung nur eine kleine Änderung. Eine
Abweichung von der Achse hat also keine großen Konsequenzen (die Abweichung in axialer
Richtung ändert Bz deutlich mehr). Die B ρ -Komponente bewirkt eine Kraft in z-Richtung auf
ein geladenes Teilchen, welches sich um das Zentrum bewegt. Bei einer Bewegung in einem
Abstand ρ 0 zur Achse wird diese Komponente im Mittel dann größer. Deren Auswirkung ist
aber schwer zu beschreiben, da in axialer Richtung zusätzlich die Kraft des Quadrupolfeldes
wirkt. Die B ρ -Komponente ist aber im Vergleich zu Bz deutlich kleiner. Die Auswirkungen auf
das Ion sollten daher nicht zu groß ausfallen. Sowieso sollte ein radialer Versatz schwieriger
zu realisieren sein, da die Fallenkammer und Spulenhalterung konzentrisch sind und so ein
Versatz direkt auffallen würde.
8 Ein
26
Test zeigte, dass der Rechenaufwand des Pythonprogramms dadurch aber deutlich zunimmt.
100
B (μT)
0
z (mm)
50
−5
−10
0
−15
−20
−50
−25
−100
0
1
2
3
4
5
ρ (mm)
(a) Bz -Komponente
100
B (μT)
3
z (mm)
50
2
1
0
0
−1
−50
−2
−3
−100
0
1
2
3
4
5
ρ (mm)
(b) B ρ -Komponente
Abbildung 4.4: Bz - und B ρ -Komponente der B 2 -Spule als Funktion von ρ und z. Die Spanne von
ρ und z wurde so gewählt, dass sie in etwa den relevanten Bereich der Fallen
abdeckt. Dabei ist die ρ-Achse durch den minimalen Abstand der Ringelektrode vom Fallenzentrum ρ 0 < 5 mm beschränkt und die z-Achse soll noch den
Bereich der Speicherfalle um z ≈ 43 mm zeigen.
27
4.4.2 Abschätzung für kleine Abstände von der Achse
Zur Überprüfung der Gleichungen (4.5) und zum Verständnis der Struktur des Magnetfeldes
abseits der Achse eignet sich eine Näherung, welche sich direkt über die Maxwell-Gleichungen
für ein zylindersymmetrisches B-Feld ergibt. Unter der Annahme einer kleinen Änderung von
Bz in radialer Richtung wird folgende Abschätzung aus Formel (3.15) hergeleitet9 [32]:
B ρ (ρ, z) = −
ρ ∂Bz
,
2 ∂z |(0,z)
Bz (ρ, z) = Bz (0, z) −
(4.7a)
ρ 2 ∂2Bz
.
4 ∂z 2 |(0,z)
(4.7b)
Diese Abschätzung hat den Vorteil, dass für sie nur das Magnetfeld auf der z-Achse bekannt
sein muss, um eine Aussage über das Feld abseits der Achse machen zu können. In Abbildung 4.5 ist die Abweichung dieser Abschätzung gegenüber der zuvor durchgeführten expliziten Berechnung des Magnetfeldes abseits der Symmetrieachse dargestellt. Dort ist zu erkennen,
dass die Abweichungen nur sehr klein ausfallen.
Die Struktur der Bz - und B ρ -Komponenten in Abbildung 4.4 kann nun mit Gleichung (4.7)
besser interpretiert werden. Die Änderung in der Bz -Komponente in radialer Richtung kann
hauptsächlich auf die zweite Ableitung auf der Achse zurückgeführt werden. Die B ρ -Komponente ist erst abseits der Symmetrieachse ungleich null und steigt dort proportional zur ersten
Ableitung der Bz -Komponente auf der Achse.
100
100
0.6
0.4
−50
1
50
z (mm)
z (mm)
0.8
0
relative Abweichung (%)
1
50
0.8
0
0.6
0.4
−50
0.2
0.2
−100
0
0
1
2
3
4
ρ (mm)
(a) Bz -Komponente
5
relative Abweichung (%)
1.2
1.2
−100
0
0
1
2
3
4
5
ρ (mm)
(b) B ρ -Komponente
Abbildung 4.5: Abweichungen von Bz und B ρ der B 2 -Spule für die beiden Berechnungsmethoden (B 1 -Spule siehe Abbildung A.2). Farbig codiert ist die Abweichung der
Näherung von der expliziten Berechnung der Felder normiert auf die Spanne
des Magnetfeldes im gezeigten Bereich.
9 Abbildung
28
4.4 zeigt, dass die Annahme der kleinen Änderung von Bz in ρ-Richtung gegeben ist.
4.5 Simulation mit COMSOL Multiphysics
Eine Simulation des magnetischen Feldes der Korrekturspulen kann als weitere Bestätigung
der durchgeführten Rechnung benutzt werden. Außerdem lassen sich mit dieser weitere Effekte betrachten. In der Simulation können Materialeigenschaften der Spulen miteinberechnet
werden, sowie der Einfluss der Fallengeometrie im Inneren der Korrekturspulen. Das Feld der
Korrekturspulen ist zwar im Vergleich zum Magnetfeld der supraleitenden Spule klein, aber
nicht homogen. Dies könnte zur Folge haben, dass die magnetischen Eigenschaften der Fallengeometrie das Magnetfeld auch relevant verzerren könnten.
COMSOL Multiphysics [33] ist eine Software zur Simulation von physikalischen Problemstellungen, welche mit Hilfe der Finite-Elemente-Methode arbeitet. Grob formuliert wird dabei
der Raum in endlich kleine Elemente (ein Gitter) eingeteilt, welche über die vorgegebenen Differentialgleichungen und Randbedingungen miteinander verbunden werden. Es entsteht dann
ein System von linearen Gleichungen welches sich über Invertierung einer Matrix lösen lässt.
Die Größe der Matrix hängt dabei hauptsächlich von der Anzahl der Elemente, also der Feinheit
des Gitters ab [34].
Als Grundlage für die Berechnung der magnetischen Felder nutzt COMSOL die Maxwellgleichungen. Das Simulationsergebnis ist das magnetische Feld auf den Gitterpunkten. Es lassen
sich daraus Datensätze extrahieren, die auf einer bestimmten Ebene oder Geraden10 liegen.
Der zu simulierende Raum wird in mehrere Bereiche unterteilt, die zum Zentrum hin in der
Feinheit ihres Gitters zunehmen. Die Korrekturspulen werden als Hohlzylinder aus Kupfer mit
einer konstanten Stromdichte modelliert. Von der Falle wurden nur solche Bauteile in den Aufbau gesetzt, welche bereits in einer vorangegangen Arbeit [35] als Quellen für eine Änderung
des Magnetfeldes in Frage kommen. In den Ergebnissen von [35] wurde die Änderung eines
1-Tesla-Feldes durch die Bauteile angegeben und dort wurden beispielsweise resultierende B 1 Komponenten in der Größenordnung von 10−7 T/mm gefunden. Das Ergebnis der Simulation
der Korrekturspulen zeigt jedoch keine sichtbare Änderung des Magnetfelds durch die Fallengeometrie. Die Annahme, dass die Inhomogenität des Feldes die Auswirkungen deutlich
verstärken könnte hat sich also als unbegründet gezeigt.
In Abbildung 4.6 wird das simulierte Feld der B 2 -Spule auf der z-Achse mit der analytischen
Lösung verglichen. Dort ist ersichtlich, dass die Simulation zum einen sehr nah an der analytischen Lösung ist und zum anderen die Fallengeometrie keinen signifikanten Einfluss auf
das Magnetfeld hat. Zu den Rändern hin werden die Fehler jedoch deutlich größer, was aber
vermutlich daran liegt, dass das feinste Gitter nur eine Ausdehnung von z = ±50 mm hat.
Abbildung A.3 und A.4 im Anhang zeigen die berechneten Bz - und B ρ -Komponenten der Simulation.
10 Das Gitter ist im Allgemeinen unregelmäßig. Um nun Daten genau auf einer Geraden oder Ebene zu bekommen,
werden diese von umliegenden Punkten interpoliert.
29
0
−5
×5000
B (μT)
−10
−15
−20
−25
−30
−35
−40
−60
−40
−20
0
20
40
60
z (mm)
Abbildung 4.6: Gezeigt ist das simulierte Feld der B 2 -Spule auf der z-Achse in grün. Die Geometrie der Falle wird hierbei in der Simulation miteinbezogen. In blau ist die
negative absolute Abweichung der simulierten Berechnung zur analytischen
Berechnung (siehe Abbildung 4.3) mit einem Faktor von 5000 dargestellt.
4.6 Vergleich mit dünnen Spulen
In diesem Abschnitt wird die Auswirkung der Ausdehnung der Spulen untersucht. Dafür werden die ausgedehnten Spulen mit dünnen Spulen verglichen, welche zentral durch die ausgedehnten Spulen verlaufen. Es werden z s = 12 (z 2 + z 1 ) und r s = 12 (r a + r i ) für jede Spule definiert.
Damit werden die Magnetfelder auf der Achse über Formel (3.4) berechnet. Es addieren sich
wie gewohnt die Magnetfelder der einzelnen Spulen linear auf.
In Abbildung 4.7 ist der Vergleich zwischen dünnen und ausgedehnten Spulen für die B 2 Spulen beispielhaft dargestellt. Die Abweichung sind insgesamt sehr klein und die größten
Abweichungen treten an den Extremalpunkten auf. Die Entwicklungskoeffizienten bei z 0 = 0
werden noch mit denen der ausgedehnten Spulen verglichen (siehe Tabelle 4.4). Es ist ersichtlich, dass die Abweichungen in den für die jeweilige Korrektur relevanten Komponenten klein
sind (∼ 5%). Damit sollten also die Auswirkungen durch die Inhomogenität der Stromdichte relativ gering sein, da nicht einmal die Ausdehnung der Spulen die Magnetfelder relevant ändert.
Es ist jedoch zu sehen, dass die B 0 -Komponente um zwei Größenordnungen zunimmt. Daran
ist zu erkennen, dass bei der Planung der Spulen die Ausdehnung miteinbezogen wurde, um
den B 0 -Term zu reduzieren.
30
5
×10
0
B (μT)
−5
−10
−15
−20
−25
−30
−100
−50
0
50
100
z (mm)
Abbildung 4.7: Abweichung des magnetischen Feldes dünner Spulen zu ausgedehnten Spulen
für die B 2 -Spule. In blau ist das Feld der dünnen Spule gezeigt und in grün das
Feld der ausgedehnten Spule. Die rote Kurve stellt die 10-fache Abweichung
dar.
Tabelle 4.4: Entwicklungskoeffizienten der dünnen Spulen im Vergleich zu den ausgedehnten
Spulen: Die oberen Werte sind die zuvor gefundenen Entwicklungskoeffizienten
der Spulenanordnung für das Modell ausgedehnter Spulen. Die Werte mit dem Index D wurden mit dem Modell dünner Spulen berechnet.
1
T 1
T 1
Spule
B 0 T mA
B1 m
B
2
2
mA
m mA
B1
B2
B 1,D
B 2,D
0
−3.776 ·
10−9
7.327 ·
10−7
0
−1.729 · 10−3
1.409 · 10−18
−1.782 · 10−3
0
0
−5.856 · 10−2
0
−2
−6.209 · 10
4.7 Mechanische Einflüsse auf die Spulen
In Abschnitt 3.5 wurden Ausdrücke für die Kräfte und Drehmomente auf eine Spule im externen
Magnetfeld hergeleitet. Diese werden nun auf den Aufbau der Korrekturspulen angewandt.
Zunächst muss dafür das axiale und radiale Magnetfeld der supraleitenden Spule an den mittleren Positionen der Korrekturspulen bekannt sein. Durch eine technische Zeichnung konnten
grobe Richtwerte für die axiale und radiale Ausdehnung der Spule mit z 2 = −z 1 = 23.5 cm,
r a = 12.5 cm und r i = 7.2 cm gefunden werden. Außerdem ist das magnetische Feld im Zentrum mit B 0 ≈ 5.7 T bekannt. Durch diese Angaben lässt sich auf die Stromdichte, welche
31
wieder als homogen angenommen wird, zurückschließen. Das Vorzeichen wird dabei positiv
gewählt. Für das Produkt aus Windungszahl und Stromstärke ergibt sich N I = 2.32·106A. Über
die zuvor eingeführte Berechnung der Magnetfelder abseits der Achse durch elliptische Integrale in Gleichung (4.5) können nun die axialen und radialen B-Feld Komponenten im Zentrum
des Querschnitts der Korrekturspulen berechnet werden (siehe Tabelle A.2 für diese Werte und
Abbildung A.5 für das magnetische Feld des supraleitenden Magneten abseits der Achse.).
Für die Kraft in z-Richtung kann auch eine Gesamtkraft auf den Aufbau betrachtet werden,
da die Spulen in diese Richtung mechanisch verbunden sind:
Fz,gesamt =
5
Õ
k=1
Fz (¯r k , z̄k ) = −2π
5
Õ
Nk Ik r¯k · B ρ (¯r k , z̄k ),
(4.8)
k =1
wobei r¯k = 21 (r i,k + r a,k ) und z̄k = 21 (z 1,k + z 2,k ) die mittleren Positionen sind. Zu beachten
ist dabei, dass B ρ antisymmetrisch in z ist. Es mittelt sich daher die Kraft auf die B 2 -Spulen
zu null, da das Paar mit gleicher Stromrichtungen genau symmetrisch um den Nullpunkt liegt
und bei der einzelnen mittleren Spule die B ρ -Komponente des externen Feldes verschwindet.
Einsetzen der Spulengeometrie liefert:
Fz,gesamt = 1.136 · 10−2 N ·
I1
.
mA
Es bezeichnet hierbei I 1 den Strom der B 1 -Spulen. Die einzelnen Kräfte auf die Spulen sollten
trotzdem berechnet werden, da sich möglicherweise große Kräfte gegenseitig auslöschen. Falls
dann eine kleine Asymmetrie vorliegt könnten daher große resultierende Gesamtkräfte entstehen. In Tabelle 4.5 sind die Werte zusammengetragen und sie zeigen, dass obige Problematik
nicht eintritt.
Die Kraft in radiale Richtung mittelte sich über die Integration zu null. Daher wurde die
radiale Komponente der Kraft in einen Druck umformuliert. Dieser muss für jede Spule einzeln
betrachtet werden, da er sich nicht addiert. Auch ein mittlerer Wert ist hier nicht sinnvoll, da
sich die Drücke im Vorzeichen unterscheiden. Nach innen sind die Spulen durch die Halterung
fixiert, daher hat ein Druck in Richtung des Zentrums wenig Auswirkungen auf den Aufbau11 .
Ob jedoch eine Fixierung der Spulen nach außen vorhanden ist, ist nicht klar.
Für die Berechnung des Drucks durch Gleichung (3.25) wird die Bz -Komponente des externen Magnetfeldes wieder bei r¯k und z̄k berechnet. Zusätzlich wird der Druck noch in eine Kraft
umgerechnet, welche derjenigen entspricht, die auf eine Spulenwindung wirkt. Dazu wird der
Betrag des Drucks mit der Oberfläche einer außen sitzenden Windung der jeweiligen Spule
multipliziert12 :
F ρ,k = |P ρ,k | · 2πbwr a,k .
(4.9)
Tabelle 4.5 zeigt die berechneten Werte. Die Kräfte sind in einer ähnlichen Größenordnung,
wie die Kräfte in axialer Richtung.
Zuletzt wird das Drehmoment auf die Spulen berechnet. Um die hergeleitete Gleichung (3.28)
zu benutzen sollte nochmals festgestellt werden, dass dort bei der Herleitung angenommen
11 Vorausgesetzt
die Halterung ist nicht so schwach, dass sie zerdrückt wird.
wird hierbei nur der Fall betrachtet, in dem der Druck nach außen wirkt. Ob er das wirklich tut hängt wieder
von der tatsächlichen Richtung von Bz und der Stromrichtung der jeweiligen Korrekturspule ab.
12 Es
32
wurde, dass sich B ρ und Bz der supraleitenden Spule nicht durch die Drehung ändern. Das
setzt also kleine Drehwinkel α des magnetischen Feldes relativ zu den Spulen voraus. Für kleine
Winkel im Bogenmaß gilt sin(α) ≈ α und es lässt sich das Drehmoment pro Grad berechnen.
Die Richtung des Drehmoments zeigt in eine Richtung in der xy-Ebene und kann somit durch
Drehung des Koordinatensystems beliebig gesetzt werden. Daher wird die Richtung jetzt nicht
mehr weiter betrachtet. Das Drehmoment auf die B 1 -Spule verschwindet hier auf Grund der
Symmetrien der Anordnung. Es werden die Werte für jede einzelne Spule (Tabelle 4.5) und
zusätzlich ein resultierendes Gesamtdrehmoment aus dem Betrag der Summe der einzelnen
Drehmomente berechnet, wobei dabei nur die B 2 -Spule einen Beitrag ungleich null liefert:
M = 9.641 · 10−4
N I2
.
◦ mA
Wieder ist der Gesamtwert in der selben Größenordnung wie die einzelnen Werte, es löschen
sich also nicht ähnlich große Werte fast gegenseitig aus.
Um eine Abschätzung für einen maximalen Auslenkwinkel zu erhalten, wird die maximale
Verkippung der Korrekturspulenhalterung in der Bohrung des Magneten berechnet. Die Bohrung des Magneten hat einen Radius von R Bohr = 5.1 cm [36]. Darin kann sich die Spulenhalterung mit Höhe H Halt = 15.2 cm und Radius R Halt = 3.9 cm durch eine zweidimensionale
Betrachtung der Querschnitte um maximal
R Bohr
2R Halt
− arctan
≈ 9.5◦
2
H
Halt
2
R Halt
+ HHalt
2
α = arcsin r
drehen. Dieser Winkel rechtfertigt die gemachte Näherung für kleine Drehwinkel.
Tabelle 4.5: Kraft in axialer Richtung Fz , Druck in radialer Richtung P ρ , Kraft in radialer Richtung F ρ und Drehmoment M. Die Vorzeichen sind nur relativ gesehen sinnvoll zu
betrachten, da das tatsächliche Vorzeichen von der Richtung des externen Magnetfeldes, sowie der Vorzeichen der Ströme der Korrekturspulen abhängt. Die Summe
der Kräfte und Drehmomente sind in der gleichen Größenordnung wie die einzelnen Werte.
1
1
1
1
Spule
Fz N mA
P ρ mN2 mA
F ρ N mA
M Nm
◦ mA
1
2
3
4
5
−1.027 · 10−2
5.682 · 10−3
0
−3
5.682 · 10
1.027 · 10−2
−932.2
944.7
788.0
−944.7
−932.2
4.192 · 10−2
4.254 · 10−2
3.467 · 10−2
4.254 · 10−2
4.192 · 10−2
−8.229 · 10−4
8.373 · 10−4
6.816 · 10−4
−8.373 · 10−4
−8.229 · 10−4
In Abschnitt 3.5 wurde zusätzlich noch die Stabilität der Auslenkung diskutiert, welche von
dem Vorzeichen des Drehmoments abhängt. Im Falle einer Oszillation bekommt das magnetische Feld der Korrekturspulen eine Zeitabhängigkeit. Ist die Richtung des Drehmoments die
selbe wie die Drehrichtung, so wird die Anordnung so weit ausgelenkt, bis die mechanischen
33
Zwänge das Drehmoment kompensieren und die Anordnung fest an einem maximalen Auslenkwinkel steht. Insgesamt sind alle in diesem Abschnitt berechneten Werte vernünftig klein,
sodass davon ausgegangen werden kann, dass sie die Spulengeometrie nicht einer starken mechanischen Belastung aussetzen.
34
5 Alternative Geometrie für die
Korrekturspulen
In Abschnitt 4.2.1 wurden Fehlerabschätzungen für die Entwicklungskoeffizienten des magnetischen Feldes der Korrekturspulen diskutiert. In Abbildung 4.2 wurde der Fehler, welcher
durch eine Abweichung der Geometrie vom Spulenzentrum entsteht, graphisch dargestellt.
Dieser Abschnitt befasst sich nun mit einer neuen Geometrie, welche versucht dies zu optimieren.
Für ein Paar identischer dünner Spulen, gibt es zwei bekannte Konfigurationenmöglichkeiten. Einmal die Helmholtzkonfiguration, bei der ein homogenes magnetisches Feld um den
Spulenpaarmittelpunkt erzeugt wird und die Antihelmholtz(Maxwell)-konfiguration, bei der
ein homogener Gradient im Spulenzentrum entsteht. Ganz allgemein lassen sich Forderungen
an die Entwicklungskoeffizienten des magnetischen Feldes stellen, um so Rückschlüsse auf die
benötigte Geometrie der Spulen zu erhalten. Damit befasst sich vor allem die Theorie des Shimmings, welche in der Kernresonanzspektroskopie von besonderer Bedeutung ist [37]. Um eine
homogene Komponente i-ter Ordnung um das Spulenzentrum zu erhalten, müssen Komponenten höherer Ordnung gleich null sein, je mehr desto homogener wird die i-te Entwicklungskomponente1 . Zusätzlich wird noch gefordert, dass Komponenten mit Ordnung niedriger als i
im Spulenmittelpunkt verschwinden.
In der Arbeit von Roméo und Hoult [37] sind Spulenanordnungen aufgeführt, die genau
dies realisieren. Die Bedingungen sind über den Winkel, den die Spulenwindung zum Achsenmittelpunkt hat, und den Strom der einzelnen Spulen formuliert. Alle Spulen haben dabei
den gleichen Radius. Für eine B 1 -Korrekturspule ist genau die Maxwellkonfiguration aufgeführt, bei der beide Spulen den Winkel 49.1◦ zum Achsenmittelpunkt haben und gegensätzlich
vom gleichen Strom durchflossen werden. Bei dieser Anordnung verschwinden auf Grund der
Symmetrie alle geraden Ableitungen; zusätzlich verschwindet noch die dritte Ableitung. Eine
B 2 -Spule, bei der die nächsten beiden Ordnungen verschwinden, kann nach Roméo und Hoult
nicht mit drei Spulen konzipiert werden. Dazu werden mindestens vier Spulen benötigt, die in
zwei Paaren angeordnet sind. Die Paare haben dabei einen Winkel von 32.1◦ beziehungsweise
75◦ zur Achse. Das innere Spulenpaar wird im Vergleich zum äußeren in entgegengesetzter
Richtung durch ein Sechstel des Stromes durchflossen.
Das soll nun auf ausgedehnte Spulen angewandt werden. In Abschnitt 4.6 wurde gefunden,
dass sich Magnetfelder ausgedehnter Spulen in den hier verwendeten Größenordnungen kaum
von denen dünner Spulen unterscheiden. Es wird der Innenradius der ursprünglichen Konfiguration mit r i = 1.3 Inch für die Spulen verwendet. Der Außenradius berechnet sich wieder
über die Windungszahl gemäß Formel (4.1). Da oben gefordert wird, dass die Radien der Spulen gleich sein müssen, wird der Außenradius der Spule mit höherer Windungszahl für alle
1 Hier
ist immer gemeint, dass sie im Spulenzentrum gleich null sind.
35
Tabelle 5.1: Geometrische Daten für eine alternative Spulenkonfiguration mit insgesamt 6 Spulen.
Spule
1
2
3
4
5
6
z 1 (mm)
−71.0
−37.2
−11.9
9.8
24.5
58.3
z 2 (mm)
−58.3
−24.5
−9.8
11.9
37.2
71.0
N
6000
2100
1000
1000
2100
6000
vier Spulen der B 2 -Korrekturspulen benutzt. Über den mittleren Radius r˜ werden die mittlere
z̃-Positionen der Spulen gemäß
z̃ = r˜/tan α
(5.1)
berechnet, wobei α der zuvor beschriebene Winkel ist. Um die niedrigere Windungszahl in den
mittleren Spulen der B 2 -Anordnung zu berücksichtigen wird dort eine um den Faktor sechs
kleinere z-Dicke genutzt. Die unterschiedlichen Gesamtströme werden über die Windungszahlen realisiert, da sonst verschiedene Stromquellen vonnöten wären2 . Da das Anpassen der
Windungszahl auch den Außenradius erhöht, ist nicht direkt ein lineares Verhalten in der Zunahme der Entwicklungskoeffizienten zu erwarten. Die Windungszahl der äußeren B 2 -Spulen
wird auf 6000 festgelegt, wodurch die Windungszahlen der inneren B 2 -Spulen auf 1000 gelegt werden. Für die B 1 -Spulen können die selben Windungszahlen wie in der ursprünglichen
Anordnung verwendet werden. Hier ändern sich nur die mittleren z-Positionen. In Tabelle 5.1
sind die geometrischen Daten für die neue Spulenanordnung aufgeführt. Spule 1, 3, 4 und 6 bilden dabei die B 2 -Korrekturspule und Spule 2 und 5 die B 1 -Korrekturspule. Abbildung 5.1 zeigt
die Geometrie der neuen Spulen im Vergleich zu den alten Spulen. Die in diesem Abschnitt
eingeführten alternativen Korrekturspulen nehmen deutlich mehr Platz ein. Das geht direkt
aus Formel (5.1) hervor, da diese aus einem großen mittleren Radius, welcher aus den hohen
Windungszahlen der B 2 -Spulen hervorgeht, einen großen Abstand der Spulen zum Zentrum
folgert.
Analog zur Anordnung in Abschnitt 4.2 werden nun die Entwicklungskoeffizienten für die
neue Anordnung berechnet (siehe Tabelle 5.2). Zunächst fällt ein nicht verschwindender B 0 Term der B 2 -Spule auf. Dieser Koeffizient sollte dabei nicht durch die Symmetrien null werden,
sondern durch Auslöschen der beiden einzelnen B 0 -Terme des inneren und äußeren Spulenpaares. Daher kann dieses B 0 nur durch die Ausdehnung der Spulen ungleich null sein. Der
B 1 -Term verschwindet dagegen für jedes Spulenpaar einzeln auf Grund der Symmetrie, was
nicht durch die Ausdehnung beeinflusst wird. Die Entwicklungskoeffizienten der neuen Anordnung sind für den selben Strom nicht gleich denen der ursprünglichen Anordnung. Das
könnte durch Anpassung der Windungszahl kompensiert werden, dadurch wird jedoch der
Außenradius noch größer und somit auch wie zuvor beschrieben die z-Position der Spulen.
Es kann, soweit die Stromquelle dies zulässt, der Strom angepasst werden, um so die nötigen
2 Zwei
36
Stromquellen würden das Einstellen der Komponenten deutlich erschweren.
Tabelle 5.2: Entwicklungskoeffizienten im Zentrum der Präzisionsfalle für die alternative Spulenkonfiguration (Index neu) und die ursprüngliche Anordnung (Index alt). Wieder
ist zu beachten, dass die B 1 -Terme der B 2 -Spulen nur durch die Computerrechnung
ungleich null erscheinen, da sie auf Grund der Symmetrien verschwinden müssen.
1
T 1
1
Spule
B 0 T mA
B1 m
B 2 mT2 mA
mA
B 1,alt
B 2,alt
B 1,neu
B 2,neu
0
−3.776 ·
10−9
0
1.101 · 10−7
−1.729 · 10−3
1.409 · 10−18
−1.329 · 10−3
3.795 · 10−19
0
−5.856 ·
10−2
0
−3.435 · 10−2
Koeffizienten zu erreichen. Dabei könnte aber die Verlustleistung aber stark ansteigen, da die
Spulen nicht supraleitend sind. Siehe Abbildung A.6 für einen Vergleich der Koeffizienten auf
der Achse mit den Koeffizienten der derzeitigen Anordnung.
Zuletzt wird die Änderung der neuen Entwicklungskoeffizienten durch den Versatz des Spulenzentrums analog zu Abbildung 4.2 betrachtet. Hierbei werden die Ströme so angehoben, dass
die Entwicklungskoeffizienten der neuen Anordnung denen der alten Anordnung bei 1 mA
entsprechen, was bei etwa I 1 = 1.3 mA und I 2 = 1.7 mA der Fall ist. In Abbildung 5.2 ist zu
erkennen, dass die neue Anordnung eine um eine Größenordnung kleinere Abweichung in der
B 2 -Komponente hat als die ursprünglichen Korrekturspulen. Die B 1 -Komponente ändert sich
zumindest durch die B 2 -Korrekturspule noch genauso stark, wenn sich vom Spulenzentrum
entfernt wird. Das ist zu erwarten, denn um einen B 2 -Term zu erhalten, muss eine Änderung
der B 1 -Komponente vorliegen3 .
Insgesamt würde die beschriebene alternative Korrekturspulenanordnung vor allem dann
sinnvoll sein, wenn es wichtig ist, dass die B 2 -Komponente wenig variieren darf. Nachteile
sind die größere Geometrie und die kleineren Entwicklungskoeffizienten bei gleichem Strom.
Eine Möglichkeit wäre es nur die B 1 -Spulen neu zu konzipieren und die B 2 -Spulen nicht zu verändern. Da die neuen B 1 -Spulen aber mit den aktuellen B 2 -Spulen überlappen (siehe Abbildung
5.1), müsste für die B 1 -Spulen ein größerer Radius gewählt werden.
3 Es
ist ja gerade 2 · B 2 (z 0 ) die Ableitung von B 1 (z 0 )
37
-
-
+
- +
-
-
+
-
+
1cm
+
z
49.1°
75°
32.1°
-
+
-
+
+
-
Abbildung 5.1: Querschnitt in der ρz-Ebene der derzeit verwendeten (oben, nur eine Hälfte)
und neuen (unten) Korrekturspulenanordnung. Die B 2 -Korrekturspulen sind in
blau dargestellt, die B 1 -Spulen in schwarz. Die Nummerierung der Spulen (vergleiche Tabelle 5.1) ist durch die Richtung von z von links nach rechts gegeben.
Das Plus- und Minus- Symbol ist wieder als Indikator für die relative Stromflussrichtung eingezeichnet.
3
relative Abweichung (%)
30
2
20
×10
10
1
0
0
−10
−1
−20
−2
−30
−4
−2
0
z₀(mm)
(a) B 1 -Komponente
2
4
−3
−4
−2
0
2
4
z₀(mm)
(b) B 2 -Komponente
Abbildung 5.2: Abweichungen der neuen B 1 - und B 2 -Komponenten durch Verschiebung des
Nullpunktes (vergleiche Abbildung 4.2). In blau ist die Abweichung der B 1 Korrekturspule und in grün die der B 2 -Spule aufgetragen.
38
6 Zusammenfassung und Ausblick
Die Magnetfeldkorrektursspulen am THe-Trap-Experiment sollen dazu genutzt werden die B 1 und B 2 -Komponente anzupassen. Um die Korrekturen quantifizieren zu können, wurden zunächst allgemeine theoretische Ausdrücke für die Entwicklungskoeffizienten des magnetischen
Feldes ausgedehnter Kreisspulen in Gleichung (3.17) hergeleitet. Um diese auf die am Experiment verwendeten Spulen anwenden zu können, musste die Geometrie der Anordnung rekonstruiert werden (vergleiche Abbildung 4.1). Dies gestaltete sich aus dem Grund schwierig, da
die Geometrie nicht einfach am Experiment nachgemessen werden konnte, sondern aus vorhandener, lückenhafter, Dokumentation extrahiert werden musste.
Es wurde ein Programm erstellt, das es ermöglicht für eine vorgegebene Spulengeometrie die
Entwicklungskoeffizienten auf der z-Achse zu berechnen. Damit wurden zunächst die Magnetfeldkomponenten der Korrekturspulen im Zentrum der Präzisionsfalle in Übereinstimmung
mit den Werten aus der Dokumentation bestimmt (siehe Tabelle 4.2). Zusätzlich wurden die
Werte auch für das Zentrum der Speicherfalle berechnet. Eine Fehlerabschätzung für diese
Koeffizienten wurde in zwei Teile aufgespalten. Zunächst wurde die Änderung der Koeffizienten unter einem Versatz des Spulen relativ zum Zentrum der Falle untersucht. Ob eine axiale
Abweichung der Spulen relativ zum Fallenzentrum existiert, wurde bisher nicht nachgemessen und könnte sich durch Arbeiten am Experiment eingestellt haben. Die Abweichungen der
Entwicklungskoeffizienten kann daher relativ groß (siehe Abbildung 4.2) ausfallen. Die zweite
Fehlerquelle, welche direkt aus Ungenauigkeiten der Fertigung entsteht (Tabelle 4.3) ist dagegen vergleichsweise klein. Die Abweichungen durch den Versatz lassen sich theoretisch über
eine Anpassung der Ströme kompensieren, ob dies jedoch praktisch gut anwendbar ist, ist noch
offen.
Das Magnetfeld abseits der Achse (Abbildung 4.4 und A.1) wurde untersucht, um eine Abschätzung für die Konsequenzen eines Versatzes der Spulen in radialer Richtung zu erhalten.
Daraus folgert eine Änderung der Entwicklungskoeffizienten, welche aber im Vergleich zum
Versatz in axialer Richtung klein ist. Es kommt aber zusätzlich eine kleine Komponente in
radiale Richtung dazu, deren Auswirkungen auf das Ion schwer zu beschreiben sind und im
Rahmen dieser Arbeit nicht untersucht wurden. Eine Simulation mit COMSOL Multiphysics
hat die zuvor gemachten Berechnungen bestätigt und außerdem gezeigt, dass die Fallengeometrie im Inneren der Spule keine relevanten Änderung des magnetischen Feldes zur Folge hat
(siehe Abbildung 4.6, A.3 und A.4).
Es wurden die Auswirkungen des starken magnetischen Feldes der supraleitenden Spule auf
den Aufbau der Korrekturspulen untersucht. Die dabei entstehenden Kräfte und Drehmomente sind klein und sollten den Aufbau nicht einer großen mechanischen Belastung aussetzen
(Tabelle 4.5).
Ein Vergleich mit den Magnetfeldern von theoretisch infinitesimal dünnen Spulen führte
zu der Feststellung, dass die Ausdehnung der Spulen keine großen Auswirkungen hat. Der
39
Vergleich bildet außerdem die Grundlage für die Einführung einer alternativen Korrekturspulenanordung, die auf theoretischen Bedingungen an dünne Spulen beruht. Die neue Geometrie
führt bei der B 1 -Spule zu einer starken Verbesserung der Ortshomogenität der Korrekturkoeffizienten (siehe Abbildung 5.2). Die vorgestellte B 2 -Spule bewirkt aber zumindest bei der Konstanz der B 1 -Komponente keine Verbesserung.
In dieser Arbeit wurden verschiedene mögliche Abweichungen der zu erwartenden Entwicklungskoeffizienten betrachtet, die sich aus Ungenauigkeiten im Aufbau ergeben haben. Es
wurde jedoch zum Beispiel nicht die Auswirkung der Korrekturspulen auf die supraleitende
Spule des Hauptmagneten untersucht. Die supraleitende Spule wird mit einem Strom aufgeladen und dann von der Stromquelle entfernt. Beim Anschaltvorgang der Korrekturspulen induzieren diese einen Strom in die supraleitende Spule, welcher ein Magnetfeld erzeugt, das dem
der Korrekturspulen entgegenwirkt. Für supraleitende Spulen folgt aus aus dem Faraday’schen
Induktionsgesetz [15] eine zeitliche Erhaltung des Flusses durch die Spulen. Das Magnetfeld des
Hauptmagneten ändert sich also, da ein zusätzlicher Fluss durch die Korrekturspulen entsteht,
der Gesamtfluss aber erhalten sein muss. Die lokale Änderung des Magnetfeldes nahe des Ions
muss aber nicht unbedingt groß sein, da der Fluss nur einem Mittelwert des Magnetfeldes entspricht. In jedem Fall sollte eine grobe Richtlinie sein, den Fluss durch die Korrekturspulen so
klein wie möglich zu halten, was durch Reduzierung der Durchmesser und Magnetfeldstärken
erreicht wird1 .
Eine Messung der Komponenten des Magnetfeldes sollte zusätzlich zu den, in dieser Arbeit durchgeführten, Rechnungen gemacht werden. Wie gerade beschrieben kann es weitere,
schwer zu modellierende Probleme geben, die letztendlich nur durch eine Messung ausfindig
gemacht werden können. Es sollte außerdem klar werden, ob ein Versatz der Spulen zum Fallenzentrum vorliegt und ob dieser behoben werden kann.
Die in dieser Arbeit durchgeführten Berechnungen und Simulationen wurden allgemein behandelt und sie lassen sich einfach auf andere Aufbauten übertragen. Daher können sie auch
an anderen Penningfallen-Experimenten, in denen die Korrektur von Inhomogenitäten des magnetischen Feldes nötig ist, als Werkzeug und Richtlinie dienen.
1 Der
40
Fluss entspricht einem Integral des Magnetfeldes über den Querschnitt der Spulen.
Literaturverzeichnis
[1] Lowell S. Brown and Gerald Gabrielse. Geonium theory: Physics of a single electron or ion
in a Penning trap. Rev. Mod. Phys., 58(1):233–311, 1986. doi: 10.1103/RevModPhys.58.233.
URL http://link.aps.org/doi/10.1103/RevModPhys.58.233.
[2] Klaus Blaum. High-accuracy mass spectrometry with stored ions. Phys. Rep., 425(1):
1–78, 2006. ISSN 0370-1573. doi: 10.1016/j.physrep.2005.10.011. URL http://www.
sciencedirect.com/science/article/pii/S0370157305004643.
[3] Klaus Blaum, Yuri N. Novikov, and Günther Werth. Penning traps as a versatile tool
for precise experiments in fundamental physics. Contemp. Phys., 51(2):149–175, 2010. doi:
10.1080/00107510903387652. URL http://www.tandfonline.com/doi/abs/
10.1080/00107510903387652.
[4] S. Sturm, A. Wagner, M. Kretzschmar, W. Quint, G. Werth, and K. Blaum. д. Phys. Rev. A,
87:030501, Mar 2013. doi: 10.1103/PhysRevA.87.030501. URL https://link.aps.
org/doi/10.1103/PhysRevA.87.030501.
[5] A. Mooser, S. Ulmer, K. Blaum, K. Franke, H. Kracke, C. Leiteritz, W. Quint, C. C. Rodegheri, C. Smorra, and J. Walz. Direct high-precision measurement of the magnetic
moment of the proton. Nature, 509(7502):596–599, May 2014. ISSN 0028-0836. URL
http://dx.doi.org/10.1038/nature13388.
[6] S. Streubel, T. Eronen, M. Höcker, J. Ketter, M. Schuh, Jr. Dyck, R. S., and K. Blaum. Toward
a more accurate Q value measurement of tritium: status of THe-Trap. Appl. Phys. B, 114
(1–2):137–145, 2014. ISSN 0946-2171. doi: 10.1007/s00340-013-5669-x. URL http://
dx.doi.org/10.1007/s00340-013-5669-x.
[7] Robert S. Van Dyck, Jr., David B. Pinegar, Seth Van Liew, and Steven L. Zafonte. The
UW-PTMS: Systematic studies, measurement progress, and future improvements. IJMS
or Int. J. Mass Spectrom., 251(2–3):231–242, 2006. ISSN 1387-3806. doi: 10.1016/j.ijms.
2006.01.038. URL http://www.sciencedirect.com/science/article/
pii/S1387380606000650.
[8] E. G. Myers, A. Wagner, H. Kracke, and B. A. Wesson. Atomic Masses of Tritium and
Helium-3. Phys. Rev. Lett., 114(1):013003, 2015. doi: 10.1103/PhysRevLett.114.013003. URL
https://dx.doi.org/10.1103/PhysRevLett.114.013003.
[9] A. Osipowicz et al. KATRIN: A Next generation tritium beta decay experiment with subeV sensitivity for the electron neutrino mass. Letter of intent. 2001. URL https://
arxiv.org/abs/hep-ex/0109033.
41
[10] E W Otten and C Weinheimer. Neutrino mass limit from tritium beta decay. Rep. Prog.
Phys., 71(8):086201, 2008. URL http://stacks.iop.org/0034-4885/71/i=
8/a=086201.
[11] Steven L. Zafonte and Robert S. Van Dyck, Jr. Ultra-precise single-ion atomic mass
measurements on deuterium and helium-3. Metrologia, 52(2):280, 2015. URL http:
//stacks.iop.org/0026-1394/52/i=2/a=280.
[12] Jochen Ketter.
Verbesserungen der Ionennachweissysteme des PräzisionsPenningfallen-Massenspektrometers TRIGA-TRAP.
Diplomarbeit, Johannes
Gutenberg-Universität Mainz, 2009. URL http://hdl.handle.net/11858/
00-001M-0000-0011-767C-C.
[13] Wikipedia.
Polarkoordinaten — Wikipedia, Die freie Enzyklopädie, 2017.
URL
https://commons.wikimedia.org/wiki/File:Cylindrical_
Coordinates.svg. [Online; aufgerufen 5-Mai-2017].
[14] Jochen Ketter. Theoretical treatment of miscellaneous frequency-shifts in Penning traps with
classical perturbation theory. Doktorarbeit, Universität Heidelberg, 2015. URL http:
//www.ub.uni-heidelberg.de/archiv/18227.
[15] Wolfgang Nolting. Grundkurs Theoretische Physik 3, Elektrodynamik. Springer Spektrum, Berlin Heidelberg, 2013. doi: 10.1007/978-3-642-37905-5. URL http://www.
springer.com/de/book/9783642379048.
[16] Gruppe Blaum. Cyclotron frequency in a Penning trap. University of Heidelberg, November
2015. URL http://www.physi.uni-heidelberg.de/Einrichtungen/
FP/versuche/anleitungen.php. [Anleitung zu einem Praktikumsversuch; Online; aufgerufen 11-Mai-2017].
[17] Lowell S. Brown and Gerald Gabrielse. Precision spectroscopy of a charged particle in an
imperfect Penning trap. Phys. Rev. A, 25:2423–2425, Apr 1982. doi: 10.1103/PhysRevA.25.
2423. URL https://link.aps.org/doi/10.1103/PhysRevA.25.2423.
[18] Eric A. Cornell, Robert M. Weisskoff, Kevin R. Boyce, and David E. Pritchard. Mode coupling in a Penning trap: π pulses and a classical avoided crossing. Phys. Rev. A, 41:312–315,
Jan 1990. doi: 10.1103/PhysRevA.41.312. URL https://link.aps.org/doi/10.
1103/PhysRevA.41.312.
[19] Eric W. Weisstein.
Laplace’s equation–spherical coordinates.
MathWorld—
A Wolfram Web Resource.
URL http://mathworld.wolfram.com/
LaplacesEquationSphericalCoordinates.html.
[Online; aufgerufen 23-Mai-2017].
[20] Steven L. Zafonte. A Determination of the Mass of the Deuteron. Doktorarbeit, University
of Washington, 2012. URL http://hdl.handle.net/1773/20247.
42
[21] Robert S. Van Dyck, Jr. B 027 Book #6. [Laborbuch zum Aufbau des THe-Trap Vorgängers;
Zu finden im THe-Trap Büro].
[22] Christoph Diehl. First mass measurements with the MPIK/UW-PTMS. Doktorarbeit, Universität Heidelberg, 2011. URL http://www.ub.uni-heidelberg.de/archiv/
12038.
[23] David Brian Pinegar. Tools for a Precise Tritium to Helium-3 Mass Comparison. Doktorarbeit, University of Washington, Seattle, 2007. URL http://search.proquest.
com/docview/304796368?pq-origsite=gscholar.
[24] S. van Liew. An ultra-precise determination of the mass of helium-3 using Penning trap mass
spectrometry. Doktorarbeit, University of Washington, 2004. URL http://search.
proquest.com/docview/305108183.
[25] Dean L. Farnham, Robert S. Van Dyck, and Paul B. Schwinberg. Determination of the
Electron’s Atomic Mass and the Proton/Electron Mass Ratio via Penning Trap Mass Spectroscopy. Phys. Rev. Lett., 75:3598–3601, 1995. doi: 10.1103/PhysRevLett.75.3598. URL
https://dx.doi.org/10.1103/PhysRevLett.75.3598.
[26] Dean L. Farnham. A Determination of the Proton/Electron Mass Ratio and the Electron’s
Atomic Mass via Penning Trap Mass Spectroscopy. Doktorarbeit, University of Washington,
Seattle, 1995. URL http://search.proquest.com/docview/304244811.
[27] Robert S. Van Dyck, Jr., Dean L. Farnham, Steven L. Zafonte, and Paul B. Schwinberg.
High precision penning trap mass spectroscopy and a new measurement of the proton’s
“atomic mass”. AIP Conference Proceedings, 457(1):101–110, 1999. doi: 10.1063/1.57450.
URL http://aip.scitation.org/doi/abs/10.1063/1.57450.
[28] Wikipedia. Inverse matrix — Wikipedia, Die freie Enzyklopädie, 2017. URL https:
//de.wikipedia.org/wiki/Inverse_Matrix. [Online; aufgerufen 23-Mai2017].
[29] Eric O. Lebigot. Uncertainties: a Python package for calculations with uncertainties,
2010. URL http://pythonhosted.org/uncertainties/. [Online; aufgerufen 23-Mai-2017].
[30] T. Bergeman, Gidon Erez, and Harold J. Metcalf. Magnetostatic trapping fields for neutral atoms. Phys. Rev. A, 35:1535–1546, Feb 1987. doi: 10.1103/PhysRevA.35.1535. URL
https://link.aps.org/doi/10.1103/PhysRevA.35.1535.
[31] Eric Jones, Travis Oliphant, Pearu Peterson, et al. SciPy: Open source scientific tools for
Python, 2001. URL http://www.scipy.org/. [Online; aufgerufen 23-Mai-2017].
[32] Jochen Ketter. Estimating off-axis components of a magnetic field from a measurement
on axis. Interner Bericht, 2013.
[33] COMSOL AB, Stockholm, Schweden. Comsol multiphysics v. 5.3., 2017. URL http:
//www.comsol.com.
43
[34] Arnulf Kost. Numerische Methoden in der Berechnung elektromagnetischer Felder. Springer
Spektrum, Berlin Heidelberg, 1994. doi: 10.1007/978-3-642-57910-3_4. URL https:
//link.springer.com/chapter/10.1007/978-3-642-57910-3_4.
[35] Marc Schuh. Magnetostatics THe-Trap. Interner Bericht, 2013.
[36] Robert S. Van Dyck, Jr., D. L. Farnham, S. L. Zafonte, and P. B. Schwinberg. Ultrastable
superconducting magnet system for a Penning trap mass spectrometer. Rev. Sci. Instrum.,
70(3):1665–1671, 1999. doi: 10.1063/1.1149649. URL https://dx.doi.org/10.
1063/1.1149649.
[37] Françoise Roméo and D. I. Hoult. Magnet field profiling: Analysis and correcting coil design. Magn. Reson. Med., 1(1):44–65, 1984. ISSN 1522-2594. doi: 10.1002/mrm.1910010107.
URL http://dx.doi.org/10.1002/mrm.1910010107.
44
Anhang
Berechnung der Entwicklungskoeffizienten
Tabelle A.1: Entwicklungskoeffizienten im Zentrum der Präzisionsfalle der einzelnen Korrekturspulen. Zur Nummerierung und Stromrichtung vergleiche Abbildung 4.1.
T 1
1
T 1
Spule
B 0 T mA
B1 m
B
2 m2 mA
mA
1
2
3
4
5
−1.538 · 10−5
2.651 · 10−5
3.076 · 10−5
−2.651 · 10−5
−1.538 · 10−5
6.375 · 10−4
−8.643 · 10−4
0
−4
−8.643 · 10
−6.375 · 10−4
−1.174 · 10−2
−1.364 · 10−3
−3.509 · 10−2
1.364 · 10−3
−1.174 · 10−2
45
Magnetfeld abseits der Symmetrieachse
100
B (μT)
20
50
z (mm)
10
0
0
−10
−50
−20
−100
0
1
2
3
4
5
ρ (mm)
(a) Bz -Komponente
100
B (μT)
4
z (mm)
50
3
2
0
1
0
−50
−1
−100
0
1
2
3
4
5
ρ (mm)
(b) B ρ -Komponente
Abbildung A.1: Bz - und B ρ -Komponente der B 1 -Spule berechnet über Gleichung (4.5).
46
100
z (mm)
50
0.5
0.4
0
0.3
0.2
−50
relative Abweichung (%)
0.6
0.1
−100
0
0
1
2
3
4
5
ρ (mm)
(a) Bz -Komponente
100
z (mm)
0.8
0.6
0
0.4
−50
relative Abweichung (%)
1
50
0.2
−100
0
0
1
2
3
4
5
ρ (mm)
(b) B ρ -Komponente
Abbildung A.2: Abweichungen der Bz - und B ρ -Komponente der B 1 -Spule berechnet über die
Näherung nach Gleichung (4.7) zu der Berechnung über Formel (4.5).
47
Simulation mit COMSOL Multiphysics
100
B (μT)
20
50
z (mm)
10
0
0
−10
−50
−20
−100
0
1
2
3
4
5
ρ (mm)
(a) Bz -Komponente
100
B (μT)
4
z (mm)
50
3
2
0
1
0
−50
−1
−100
0
1
2
3
4
5
ρ (mm)
(b) B ρ -Komponente
Abbildung A.3: Bz - und B ρ -Komponente der B 1 -Spule berechnet über COMSOL Multiphyics.
Diese Simulation bezieht Teile der Geometrie der Falle in der Berechnung der
Felder ein (siehe Abschnitt 4.5).
48
100
B (μT)
0
z (mm)
50
−5
−10
0
−15
−20
−50
−25
−100
0
1
2
3
4
5
ρ (mm)
(a) Bz -Komponente
100
B (μT)
3
z (mm)
50
2
1
0
0
−1
−50
−2
−100
−3
0
1
2
3
4
5
ρ (mm)
(b) B ρ -Komponente
Abbildung A.4: Bz - und B ρ -Komponente der B 2 -Spule berechnet über COMSOL Multiphyics.
Diese Simulation bezieht Teile der Geometrie der Falle in der Berechnung der
Felder ein (siehe Abschnitt 4.5).
49
Magnetfeld der supraleitenden Spule
Tabelle A.2: Magnetisches Feld Bz und B ρ des supraleitenden Magneten an den mittleren Stellen der Spulenquerschnitte der Spulen 1-5.
Bz (T)
5.69
5.69
5.70
5.69
5.69
Spule
1
2
3
4
5
B ρ (T)
−0.022
−0.012
0
0.012
0.022
100
B (T)
z (mm)
50
5.65
5.6
0
5.55
−50
5.5
−100
1
2
3
4
5
ρ (mm)
(a) Bz -Komponente
100
B (T)
0.01
z (mm)
50
0.005
0
0
−0.005
−50
−0.01
−100
1
2
3
4
5
ρ (mm)
(b) B ρ -Komponente
Abbildung A.5: Bz - und B ρ -Komponente der supraleitenden Spule berechnet über Gleichung
(4.5). Die Geometrie dieser Spule wurde in Abschnitt 4.7 beschrieben.
50
40
0
30
−20
20
−40
10
−60
B (µT)
B (μT)
Alternative Geometrie für die Korrekturspulen
0
−10
−80
−100
−20
−120
−30
−140
−40
−60
−40
−20
0
20
40
−60
60
−40
−20
0
20
40
60
20
40
60
z (mm)
z (mm)
0.004
0.001
0.003
0.002
0
B₁ (T/m)
B₁ (T/m)
0.0005
−0.0005
0.001
0
−0.001
−0.001
−0.002
−0.003
−0.0015
−60
−40
−20
0
20
40
60
−0.004
−60
−40
−20
0
z (mm)
z (mm)
0.06
0.04
0.1
B₂ (T/m²)
B₂ (T/m²)
0.02
0
−0.02
0.05
0
−0.04
−0.05
−0.06
−60
−40
−20
0
20
40
60
−60
−40
−20
0
20
z (mm)
z (mm)
(a) B 1 -Spule
(b) B 2 -Spule
40
60
Abbildung A.6: Vergleich der Entwicklungskoeffizienten der alternativen Spulenanordnung
(grün) zur derzeit verwendeten Geometrie (blau). Die Ströme der alternativen
Spulenanordnung sind so eingestellt, dass die jeweiligen Korrekturkoeffizienten mit denen der ursprünglichen bei z = 0 übereinstimmen.
51
Danksagung
Ich möchte mich an dieser Stelle bei allen Mitgliedern von THe-Trap bedanken. Die Arbeit mit
euch hat mir sehr viel Spaß gemacht und meinem Werdegang auf jeden Fall weitergeholfen!
Allen voran gebührt mein größter Dank Jochen Ketter, der mir jederzeit mit Rat und Tat zur
Seite stand und ohne den ich wohl an so mancher Stelle verzweifelt wäre. Bei Marc Schuh
bedanke ich mich für die tolle Unterstützung bei der Durchführung der Simulation und bei
Tom Segal für die schönen Gespräche beim zeitigen Mittagessen um 12 Uhr. Auch bei Klaus
Blaum, unter dessen Leitung diese Arbeit entstanden ist, möchte ich mich ganz herzlich für die
unglaublich motivierende Unterstützung bedanken.
Bei meiner Eltern bedanke ich mich für die Unterstützung bezüglich meiner Studienwahl
und bei meinen Freunden hier in Heidelberg und in der Heimat für einen tollen ersten Studienabschnitt.
Erklärung
Ich versichere, dass ich diese Arbeit selbstständig verfasst und keine anderen als die angegebenen Quellen und Hilfsmittel benutzt habe.
Heidelberg, den 20. Juni 2017