Untitled
Werbung

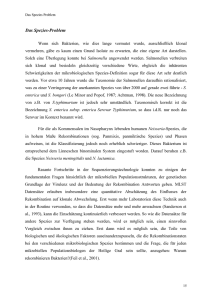
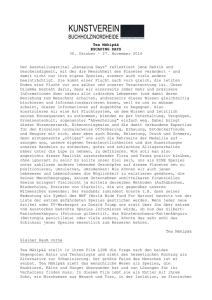
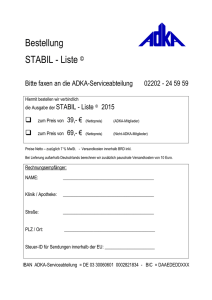
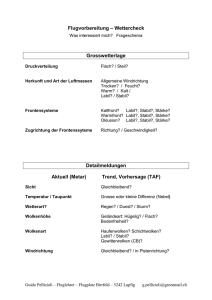
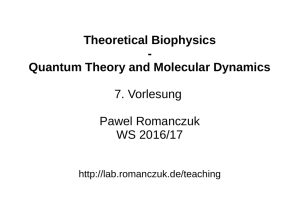
116 KAPITEL 8 Autonome Systeme Autonome Systeme haben die Form, ~x˙ = ~v (~x), ~x ∈ D ⊆ Rn , mit einer von t unabhangigen (autonomen) rechten Seite. Im folgenden sei ~v : Rn ⊇ D → Rn stets eine einmal stetig dierenzierbares Vektorfeld. Nach dem Existenz- und Eindeutigkeitssatz gibt es zu jedem ~a ∈ D eine maximale Losung, die zur Zeit t = t0 durch ~a geht; wir bezeichnen sie mit ~x(t, ~a). Die Spur dieser Kurve heit Losungsbahn (Phasenbahn, Trajektorie, Integralkurve ). Die Durchlaufrichtung der Bahn ist durch den Tangentenvektor ~x˙ = ~v(~x) bestimmt. Die Menge aller Phasenkurven wird als Phasenportrait bezeichnet. Satz 38. Verschiedene Phasenbahnen schneiden sich nicht. Beweis: Folgerung aus dem EE-Satz. Definition # 9. ~x(t) = ~a ∈ D heit Gleichgewichtslosung oder stationare Losung, wenn ~v (~a) = ~0 gilt. Die skalare konstante Funktion x(t) = a ist GGL der DGL x(n) = f (x, ẋ, ẍ, . . . , x(n−1) ), wenn f (a, 0, . . . , 0) = 0. Den Gleichgewichtspunkt ~a nennt man auch einen kritischen Punkt oder Gleichgewichtszustand. Beispiel 55. ~x˙ = ẋ ẏ ! = y(x + y − 1) x(1 − x − y) ! . Neben ~x = ~0 ist jeder Punkt der Geraden x + y = 1 kritisch. Wegen ẋẏ = − xy beschreibt das Vektorfeld ~v ein Tangentenfeld an die Kreise x2 + y2 = const, d.h. die Spuren der nicht-stationaren Losungen liegen auf diesen Kreisen. 117 118 8. AUTONOME SYSTEME 1. Ebene autonome Systeme, die Phasen-DGL Im Fall n = 2 gibt es fur die Phasenkurven des autonomen Systems ẋ = f (x, y), (x, y) ∈ D ⊆ R2 ẏ = g(x, y), (44) neben der Parameterdarstellung x = x(t), y = y(t) auch die Moglichkeit, sie stuckweise explizit als Graph y = y(x) bzw. x = x(y) oder implizit in der Form F (x, y) = const darzustellen. Unter der Voraussetzung, dass x = x(t) u ber einem t-Intervall umkehrbar ist, t = t(x), ergibt sich f ur y = y(t) = y(t(x)) durch Dierentation nach x mit der Kettenregel (auere Ableitung ist ∂t∂ y = ẏ und die innere ∂ 1 t = ∂x = ẋ1 :) ∂x ∂t y0 = dy ẏ g(x, y) = = , dx ẋ f (x, y) falls f (x, y) 6= 0. Man diese Dierentialgleichung die Phasen- oder Bahnen-DGL von (44); die implizite Form ist g(x, y) − f (x, y)y 0 = 0. 25. Die explizite Losung (x(t), y(t)) von (44) gibt das Weg- " Zeit-Gesetz\ der durch (44) modellierten Bewegung an, die Losung der PhasenDGL gibt dagegen nur die gesamte Bahn an, auf der diese Bewegung stattndet. ! ẋ Die durch den Tangentenvektor gegebene Durchlaufrichtung lasst sich Bemerkung ẏ aus der Phasen-DGL ablesen: Sie ist auerhalb der kritischen Punkte durch ! f (x, y) g(x, y) Beispiel gegeben. 56. Wir betrachten das autonome Dierentialgleichungssystem ~x˙ = 0 −1 1 0 ! ~x. Dieses kann umgeschrieben werden zum System ẋ = −y, ẏ = x. Die allgemeine Losung ergibt sich wie folgt: Eigenwerte bestimmen −λ −1 det (A − λE) = 1 −λ = λ2 + 1 = 0 ⇔ λ1/2 = ±i. 1. EBENE AUTONOME SYSTEME, DIE PHASEN-DGL Der zu λ=i i 1 gehorige Eigenvektor ist ~v = komplexe Losung: ~z(t) = eit i 1 ! ! 0 1 = (cos t + i sin t) 119 und man erhalt daraus die ! +i 1 0 !! deren Real- und Imaginarteil die allgemeine Losung des DGL-Systems ergibt: ~x(t) = c1 − sin t cos t ! ! cos t sin t + c2 = −c1 sin t + c2 cos t c1 cos t + c2 sin t Gibt man noch eine bestimmte Anfangsbedingung vor, z.B. ! . ~x(0) = erhalt man eine spezielle Losung, in unserem Fall ~x(t) = x(t) y(t) ! = − sin t + 2 cos t cos t + 2 sin t 2 1 ! , so ! Wie man leicht sieht hat man also das "Weg-Zeit-Gesetz\ der Bewegung erhalten. Was besagt nun die Phasen-DGL? x ẏ =− . ẋ y y0 = Diese Dierentialgleichung ist trennbar und hat die Losung Z ⇔ Z y dy = − y dx ⇔ y2 x2 = − + C ⇔ x2 + y 2 = const. 2 2 Die Phasenbahnen sind also Kreise, wie man durch explizites Nachrechnen leicht uberpruft: > > > x2 (t) + y 2 (t) = (−c1 sin t + c2 cos t)2 + (c1 cos t + c2 sin t)2 = c21 + c22 . Gema dem Tangentialvektor ~x˙ = −y x ! erfolgt der Durchlauf der Kurve entgegen dem Uhrzeigersinn. Um dies zu uberprufen, trage man im Punkt ! (x0 , y0 ) eines Kreises den Tangentialvektor mit den Komponenten ẋ ẏ = 120 8. AUTONOME SYSTEME f (x, y) g(x, y) tialvektor ! = −y0 x0 −y0 x0 ! = ! an. So erhalt man z.B. im Punkt −1 2 ! (2, 1) den Tangen- dieser zeigt in in negativer x-Richtung und in positiver y-Richtung, also entgegen dem Uhrzeigersinn. Da die Kurven geschlossen sind, kommt man nach einem Umlauf wieder am Ausgangspunkt an und das bedeutet, dass die Losung des Dierentialgleichungssystems periodisch ist. Bemerkung 26. Gewohnliche Dierentialgleichungen 2. Ordnung besitzen ein aquivalentes Dierentialgleichungssystem und wir konnen die Phasenbahn, das Phasenportrait auch fur gewohnliche Dierentialgleichungen n-ter Ordnung untersuchen. 2. Stabilität Wir untersuchen das Verhalten von Losungen in der Nahe von stationaren Losungen (Gleichgewichtslagen). Man nennt diese stabil, wenn jede Losung, die einmal hinreichend nah an sie herankommt, auch fur alle weitern Zeiten in der Nahe bleibt. Genauer: 10. Eine Gleichgewichtslage ~a von ~x = ~v (~x) heit (1) stabil, wenn es fur jedes ε > 0 ein δ > 0 gibt, so dass fur jede Definition Losung gilt |~x(0) − ~a| < δ ⇒ |~x(t) − ~a| < ε (2) asymptotisch stabil, wenn es ein δ > Losung gilt fur alle t > 0, 0 gibt, so dass f ur jede |~x(0) − ~a| < δ ⇒ lim ~x(t) = ~a, (3) instabil, wenn sie nicht stabil ist. Bemerkung t→∞ 27. (1) Eine asymptotisch stabile GGL ist stets auch stabil. Jede Losung die einmal der asymptotisch stabilen GGL hinreichend nahe kommt, bleibt nicht nur fur alle Zeiten in der Nahe dieses Punktes, sondern mundet schlielich in ihn ein. (2) Implizit in der Denition enthalten ist die Forderung, dass die betreffenden Losungen auch fur alle t ≥ 0 erklart sind. 2. STABILITAT 121 (3) Man nennt eine GGL ~a eines ebenen DGL-Systems ein Zentrum, wenn in einer Umgebung von ~a keine weitere GGL liegt und samtliche Bahnen geschlossen sind Satz 39. Stabilitätsatz für lineare Systeme. Die Art einer GGL ~a des linearen DGL-Systems ~x˙ = A~x ist durch die Eigenwerte λ1 , λ2 , . . . λn von A ∈ Rn×n bestimmt: (1) Re λk < 0 fur alle k ⇐⇒ ~a asymtotisch stabil, (2) Re λk > 0 fur ein k ⇒ ~a instabil, (3) Re λk ≤ 0 fur alle k und falls Re λk = 0, sind die algebraische und die geometrische Vielfachheit von λk gleich ⇐⇒ ~a stabil. Der Beweis beruht auf der Losungsdarstellung. Bemerkung ~x˙ = A(t)~x. Beispiel 28. Der Stabilitatssatz gilt nicht fur nicht-autonome Systeme 57. ẋ = −x + y + 2, ẏ = −x − y − 4 ⇐⇒ ~x˙ = −1 1 −1 −1 ! ~x Die GGLn sind die Losungen des Gleichungssystems −x + y + 2 = 0, −x − y − 4 = 0, ! −1 dass die eindeutig bestimmte Losung ~a = hat. Die Stabilitat ergibt sich −3 den Eigenwerten der Systemmatrix A, λ1/2 = −1 ± i. wegen Re λ1/2 = −1 < 0 ist ~a ein asymptotischer Strudel (bzw. asymptotisch stabile GGL). Die Ubertragung des Stabilitatssatzes fur lineare Systeme (Satz 39) auf nichtlineare autonome Systeme gelingt uber die Jacobi-Matrix J~v der rechten Seite ~v . In einem stationaren Punkt gilt ~v (~a) = ~0, daher lautet die lineare Approximation: ~v (~x) = ~0 + J~v (~a)(~x − ~a) + o(|~x − ~a|). 122 8. AUTONOME SYSTEME Satz 40. Stabilitätssatz für nichtlineare Systeme. Sei ~a ∈ Rn , A ∈ Rn×n und ~g in einer Umgebung von ~a |~g (~ x)| = 0, so gilt f ur ~g (~a) = ~0 und lim~x→~a |~ x−~a| ein stetiges Vektorfeld, fur das die GGL ~a des DGL-Systems ~x˙ = A(~x − ~a) + ~g (~x) (1) Re λk < 0 fur alle k ⇒ ~a asymtotisch stabil, (2) Re λk > 0 fur ein k ⇒ ~a instabil. ohne Beweis. Rechenschema fur die Stabilitat von ~x˙ = ~v (~x), ~x ∈ Rn . (1) Alle GGLn ~a als Losungen von ~v (~x) = ~0 bestimmen. (2) Die Jacobi-Matrix berechnen ∂v1 ∂x1 ... ∂v1 ∂xn ∂vn ∂x1 ... ∂vn ∂xn J~v (~x) = ... ... .. . . (3) Fur jedes ~a die Eigenwerte λk von A := J~v (~a) berechnen. (a) Re λk < 0, fur alle k ⇒ ~a asymptotisch stabil. (b) Re λk > 0, fur (wenigstens) ein k ⇒ ~a instabil. (c) (i) ~v (~x) = A~x + ~b (linear): Re λk ≤ 0 fur alle k und zu jedem Eigenwert λ mit Re = 0 und Vielfachheit l ist der Rang von (A − λE) gleich n − l ⇒ ~a stabil. (ii) Fur andere Systeme keine weitere Aussage. Bemerkung 29. Die zur Stabilitatsuntersuchung notigen Eigenwerte mussen nicht explizit berechnet werden. Die Frage, ob die Nullstellen eines Polynoms in der linken komplexen Halbebene liegen, kann nach dem Routh-HurwitzKriterium bestimmt werden. Wir geben hier nur ein paar Spezielfalle an: Ein Polynom heit stabil, wenn alle seine Nullstellen negativen Realteil besitzen. (1) n = 2 : a2 λ2 + a1 λ + a0 ist stabil (a2 > 0) ⇐⇒ a0 > 0 und a1 > 0. (2) n = 3 : a3 λ3 +!a2 λ2 + a1 λ + a0 ist stabil (a3 > 0) ⇐⇒ a0 > 0, a1 > 0 und det a1 a0 a3 a2 > 0. 2. STABILITAT 123 (3) n = 4 : a4 λ4 + a3 λ3 + a2 λ2 + a1 λ +a0 ist stabil (a4 > 0) ⇐⇒ a0 > 0, a1 > 0, det a1 a0 a3 a2 ! >0 und a1 a0 0 det a3 a2 a1 > 0. 0 a4 a3 (4) Eine notwendige, aber nicht hinreichende Bedingung ist die folgende. Haben samtliche Nullstellen der Gleichung λn + an−1 λn−1 + . . . + a1 λ + a0 = 0 ak ∈ R negativen Realteil, dann gilt notwendig ak > 0 fur alle k. Beispiel 58. ẋ = x + y + 2, ẏ = y − x2 + 4 ⇐⇒ ~x˙ = ~v (~x) = x+y+2 y − x2 + 4 ! . 1. GGLn: (−2, 0), 2. J~v (~x) = (1,!−3). 1 1 . −2x 1 3. Nach dem Hurwitz-Kriterium sind die GGL instabil, da 1−λ 1 −2x 1 − λ und folglich a1 = −2 < Eigenwerte bestatigen. 0 = λ2 − 2λ + 1 + 2x ist. Man kann das genauso durch Ausrechnen der 8. AUTONOME SYSTEME 124 Stabilitätseigenschaften von linearen und fastlinearen Systemen für n = 2 Knoten Typ asymptotisch stabil instabil Stabilitat Sattelpunkt Knoten Knoten Typ instabil asymptotisch stabil instabil Stabilitat fastlineares System λ1 > λ2 > 0 Knoten instabil instabil lineares System λ1 < λ2 < 0 Sattelpunkt Knoten oder Strudel asymptotisch stabil Eigenwerte λ2 < 0 < λ1 Knoten oder Gerade von instabil Ruhelagen Knoten oder Strudel instabil <0 λ1 , λ2 = α ± iβ λ1 >0 asymptotisch stabil (stabil) Strudel asymptotisch stabil = Knoten (Gerade von Ruhelagen) instabil Strudel unbestimmt λ2 Strudel asymptotisch stabil Zentrum oder Strudel λ1 α>0 Strudel stabil = α<0 Zentrum λ2 λ1 = iβ, λ2 = −iβ 2. STABILITAT 125 2.1. Schwingendes Pendel. Es sei ein Masse m am Ende einer starren aber gewichtslosen Stange der Lange l befestigt. Das andere Endeder Stange ist im Ursprung O befestigt. Das Pendel unterliegt der Schwerkraft und die Auslenkung x wird entgegen dem Uhrzeigersinn in der Ruhelage beginnend gemessen. Die Schwer dx kraft mg wirkt nach unten, wahrend die dampfende Kraft c dt , wobei c positiv ist, immer in die der Bewegung entgegengesetzte Richtung weist. O x l ∣dxdt∣ c m l sin x mg Mit Hilfe des Drehimpulserhaltungssatzes leitet man die Bewegungsgleichung fur das gedampfte Pendel ab: ẍ + c g ẋ + sin x = 0, ml l dabei sind m, l, g, c positive Konstanten. Die Gleichung fur das ungedampfte Pendel erhalt man fur c = 0. Wir untersuchen nun das Stabilitatsverhalten des zugehorigen Systems 1. Ordnung sowohl fur das ungedampfte als auch das gedampfte Pendel. Ungedampftes Pendel: In diesem Fall lautet das System: ẋ = y, ẏ = − g sin x. l Die stationaren Punkte ergeben sich zu (kπ, 0), k ∈ Z. Zur Klassikation der stationaren Punkte benotigen wir die Jacobi-Matrix des Systems: J~v = 0 1 g − l cos x 0 ! . 126 8. AUTONOME SYSTEME Wegen cos((2k + 1)π) = −1 und cos(2kπ) = 1, haben wir zwei Falle zu untersuchen: 1. Alle stationaren Punkte ((2k + 1)π, 0). In diesem Fall gilt 0 1 g 0 l J~v = ! und die charakteristische Gleichung lautet g λ − = 0 ⇐⇒ λ1/2 = ± l 2 r g , l da g, l > 0. Da einer der Eigenwerte positiv ist, sind diese Gleichgewichtslagen instabil. 2. Alle stationaren Punkte (2kπ, 0). In diesem Fall gilt 0 1 − gl 0 J~v = ! und die charakteristische Gleichung lautet r g g λ + = 0 ⇐⇒ λ1/2 = ±i , l l 2 da g, l > 0. Da die Realteile Null sind, sind die Gleichgewichtslagen unbestimmt. Zur weiteren Untersuchung kann man die Phasendierentialgleichung heranziehen: y0 = g sin x ẏ =− , ẋ l y die eine trennbare Dierentialgleichung mit der Losung y2 = 2 g cos x + C l ist. Wie man leicht sieht impliziert y 2 , dass 2 gl cos x+C ≥ 0 sein muss. In Abhangigkeit von der Konstanten C ergibt das geschlossene Kurven oder auch nicht geschlossene Kurven wie man dem Phasenportrait entnehmen kann. Daraus wird auch ersichtlich, dass die Gleichgewichtslagen Zentren sind. Gedampftes Pendel. Die Situation ist ahnlich aber nicht gleich der beim ungedampften Pendel, da ein Zusatzterm auftritt. Das System lautet in diesem Fall: ẋ = y, g c sin x − y. l ml Die stationaren Punkte ergeben sich wiederum zu (kπ, 0), k ∈ Z. Zur Klassikation ẏ = − der stationaren Punkte benotigen wir die Jacobi-Matrix des Systems: J~v = 0 1 g c − l cos x − ml ! . 2. STABILITAT 127 Wegen cos((2k + 1)π) = −1 und cos(2kπ) = 1, haben wir auch hier zwei Falle zu untersuchen: 1. Alle stationaren Punkte ((2k + 1)π, 0). In diesem Fall gilt J~v = 0 g l 1 c − ml ! und die charakteristische Gleichung lautet r c2 c g c g λ2 + λ − = 0 ⇐⇒ λ1/2 = − ± + , 2 2 ml l 2ml 4m l l da g, l, c, m > 0. Da einer der Realteile der Eigenwerte positiv ist, sind diese Gleichgewichtslagen instabil. 2. Alle stationaren Punkte (2kπ, 0). In diesem Fall gilt J~v = 0 1 g c − l − ml ! und die charakteristische Gleichung lautet g c c λ + = 0 ⇐⇒ λ1/2 = − ± λ + ml l 2ml 2 r g c2 − . 2 2 4m l l Falls 4mc 2 l2 − gl ≥ 0 ist, so sind beide Eigenwerte kleiner Null und die Gleichge2 wichtslagen sind asymptotisch stabil. Gilt dagegen 4mc 2 l2 − gl < 0, so ist der Realteil der Eigenwerte kleiner Null und die Gleichgewichtslagen sind ebenfalls asymptotisch stabil. Wie man auch am Phasenportrait erkennen kann. Die Separatrix trennt Einzugsbereiche\, d.h. bendet sich das Pendel nicht exakt in einer der " instabilen Gleichgewichtslagen, so wird es fur t → ∞ in eine asymptotisch stabile Gleichgewichtslage einmunden. Die Separatrix trennt nun die Bereiche, die in einer bestimmten asymptotisch stabilen Gleichgewichtslage enden voneinander. 2 128 8. AUTONOME SYSTEME 3. KONKURRIERENDE SPEZIES 129 3. Konkurrierende Spezies Dieses Modell geht davon aus, dass in einer abgeschlossenen Umgebung zwei Spezies existieren, die sich um einen begrenzten Vorrat an Futter streiten; dies konnen zum Beispiel zwei Fischarten in einem Teich sein, die sich nicht gegenseitig fressen, jedoch um vorhandenes Futter kampfen. Ebenso konnte es sich um ein 2-Parteien-System handeln, so dass beide Parteien um Wahlerstimmen kampfen. Grundregel: Des einen Gewinn ist des anderen Verlust.\ " Mathematische Annahmen: Die Population der einen Spezies unterliegt in Abwesenheit der anderen der logistischen Gleichung, d.h. dx = x(ε1 − σ1 x), dt dy = y(ε2 − σ2 y). dt wobei ε1 , ε2 die jeweiligen Wachstumsraten der beiden Populationen und σε11 , σε11 die jeweiligen Sattigungsniveaus darstellen. Sind jedoch beide Arten gleichzeitig anwesend, so werden die beiden Spezies den verfugbaren Futtervorrat der jeweils anderen Spezies reduzieren. Die einfachste Moglichkeit, diese Reduzierung zu berucksichtigen besteht darin, den Wachstumsfaktor ε1 − σ1 x in der ersten Gleichung durch ε1 − σ1 x − α1 y zu ersetzen, wobei α1 das Mass f ur die Groe darstellt, mit der die Spezies y und die Spezies x in Wechselwirkung stehen. Damit ergibt sich folgendes System: dx = x(ε1 − σ1 x − α1 y), dt dy = y(ε2 − σ2 y − α2 x). dt Die Werte der positiven Konstanten ε1 , σ1 , α1 , ε2 , σ2 , α2 hangen von der jeweils betrachteten Spezies ab und werden im allgemeinen aus Beobachtungen bestimmt. Wir sind nur an nichtnegativen Losungen interessiert, da der minimale Umfang einer Population Null ist. Beispiel 59. dx = x(1 − x − y), dt dy 3 1 =y −y− x dt 4 2 Bestimmung der stationaren Punkte = GGL : Losungen des algebraischen Gleichungssystem y x(1 − x − y) = 0, 3 1 − y − x = 0, 4 2 dx dt = dy dt = 0, d.h. wir haben die 130 8. AUTONOME SYSTEME zu bestimmen. 1 Zone IV x nimmt ab, 1-x-y<0 Zone III y nimmt ab, 0,75-y-0,5x<0 y nimmt zu, 0,75-y-0,5x>0 Zone I x nimmt zu, 1-x-y>0 Zone II 1 Wir betrachten eine Gleichung (z.B. die erste) und bestimmen die Nullstellen: x(1 − x − y) = 0 f ur x = 0 bzw. x = 1 − y. Fur x = 0 erhalt man aus der zweiten Gleichung y = 0 oder y = 34 , wir erhalten also als kritische Punkte (0, 0) und (0, 34 ). Setzt man x = 1 − y in die zweite Gleichung ein, so ergibt sich y( 41 − 12 y) = 0 und man erhalt y = 0 und y = 21 . Hieraus ergeben sich die beiden weiteren kritischen Punkte (1, 0) und ( 12 , 12 ). Wir klassizieren nun die kritischen Punkte. Dazu benotigen wir den JacobiMatrix des Systems: J~v (~x) = ∂f ∂x ∂g ∂x ∂f ∂y ∂g ∂y ! 1 − y − 2x − 12 y = 3 4 −x − 2y − 12 x ! . Der erste kritischen Punkt (0, 0) entspricht dem Zustand, in dem beide Spezies aussterben. Hier ist J~v ((0, 0)) = 1 − y − 2x − 21 y 3 4 −x − 2y − 12 x ! = x=0, y=0 1 0 0 43 ! . Diese Matrix hat oensichtlich die Eigenwerte λ1 = 1 und λ2 = 34 , deren Realteile beide groer als Null sind. Folglich handelt es sich um eine instabile GGL. Der Punkt (0, 34 ) entspricht dem Zustand, wo die Spezies y uberlebt, die Spezies x aber ausstirbt. In diesem Fall lautet die Jacobi-Matrix: 3 J~v ((0, )) = 4 1 − y − 2x − 12 y 3 4 −x − 2y − 12 x ! = x=0, y= 43 1 4 − 83 0 − 34 ! 3. KONKURRIERENDE SPEZIES 131 und die Eigenwerte sind λ1 = 14 > 0 und λ2 = − 34 . Da der Realteil von λ1 groer als Null ist, ist dies ebenfalls eine instabile Gleichgewichtslage. Analog entspricht der Punkt (1, 0) dem Zustand, wo die Spezies x uberlebt, die Spezies x aber ausstirbt. Die Jacobi-Matrix lautet: J~v ((1, 0)) = 1 − y − 2x − 21 y 3 4 −x − 2y − 21 x ! = x=1, y=0 −1 −1 1 0 4 ! und besitzt die Eigenwerte λ1 = −1 und λ2 = 14 > 0. Es handelt sich also ebenfalls um eine instabile GGL. Betrachten wir nun den Punkt ( 12 , 12 ). Dieser Punkt entspricht dem Zustand eines gemischten Gleichgewichts bzw. einem Zustand der Koexistenz. Fur die Jacobi-Matrix gilt J~v ((1, 0)) = 1 − y − 2x − 12 y 3 4 −x − 2y − 12 x und die Eigenwerte ergeben sich aus zu λ1/2 GGL. ! = x= 12 , y= 21 − 12 − 12 − 41 − 12 ! 1 1 1 1 − 12 −2 − λ = (λ + )2 − = λ2 + λ + = 0 1 1 −4 −2 − λ 2 8 8 q = − 21 ± 14 − 81 < 0 und es handelt sich um eine asymptotisch stabile 132 8. AUTONOME SYSTEME 4. RAUBER-BEUTE-MODELLE 133 Fur das allgemeine System dx = x(ε1 − σ1 x − α1 y), dt dy = y(ε2 − σ2 y − α2 x). dt ergeben sich graphisch die folgenden Falle 1 /1 2 / 2 1 /1 2 / 2 1 / 1 2 / 2 2 / 2 1 / 1 2 / 2 1 /1 1 /1 2 / 2 2 / 2 1 / 1 1 / 1 2 / 2 Eine Koexistenz beider Spezies ist oensichtlich nur in den beiden unteren Fallen moglich. Damit dieser Zustand aber eintritt, muss der kritische Punkt=Schnittpunkt beider Geraden ein asymptotisch stabiler, uneigentlicher Knoten sein, dies ist nur fur σ1 σ2 − α1 α2 > 0 der Fall und entspricht dem rechten unteren Bild. Im anderen Fall liegt ein Sattelpunkt vor wie man durch nachrechnen ermitteln kann. 4. Räuber-Beute-Modelle Der Standardfall hier ist, dass die eine Spezies (Rauber) die andere Spezies (Beute) frisst, wobei die Beute eine andere Nahrungsquelle hat. Interessanterweise kann man dieses Modell auch auf den sogenannten Schweinezyklus\ anwenden, " der die Abhangigkeit der Schweineproduktion vom Verkaufspreis beinhaltet. Hohe Preise fuhren zu einer hoheren Schweineproduktion, die wiederum die Preise sinken lasst, das lasst nun wiederum mit Verzogerung die Schweineproduktion sinken bis ein Mangel an Schweineeisch entsteht, der wiederum zu steigenden Preisen und als Folge davon zu einer hoheren Schweineproduktion fuhrt und dann fangt alles wieder von vorn an. Fur Rauber-Beute-Modelle werden fur die entsprechenden Populationen die folgenden Annahmen gemacht: (1) Bei Abwesenheit des Raubers wachst die Population der Beute proportional zur gegenwartigen Population; fur y = 0 gilt somit dx = ax mit a > 0. dt 134 8. AUTONOME SYSTEME (2) In Abwesenheit der Beute stirbt der Rauber aus; d.h. fur x = 0 gilt dy = −cy dt mit c > 0. (3) Die Anzahl der Begegnungen zwischen Raubtier und Beutetier ist proportional zum Produkt ihrer Populationen. Jedes dieser Zusammentreen bedingt eine Wachstumszunahme des Raubers, wahrend das Wachstum der Beute abnimmt. D.h. die Wachstumsrate des Raubers nimmt um den Term γ x y zu, wogegen die Wachstumsrate der Beute um den Term −αß, x y abnimmt, dabei sind γ und α positive Konstanten. Aus diesen Voraussetzungen ergibt sich das folgende System von gewohnlichen Differentialgleichungen 1. Ordnung: dx = ax − αxy = x(a − αy), dt dy = −cy + γxy = y(−c + γx), dt dabei sind a, c, α und γ positive Konstanten; a ist die Wachstumsrate der Beute, c die Sterberate des Raubers und α sowie γ sind Messgroen f ur die Wechsel- wirkung zwischen beiden Spezies. Diese Gleichungen werden auch Lotka-VolterraGleichungen genannt. Beispiel 60. Untersuchen Sie die Gleichgewichtslagen des Systems dx 1 1 = x 1 − y = x − xy, dt 2 2 fur nichtnegative 3 1 3 1 dy = y(− + x) = − y + xy dt 4 4 4 4 x und y. x nimmt ab, 1-0,5y<0 x nimmt ab, 1-0,5y<0 Zone IV y nimmt ab, -0,75+0,25x<0 Zone III y nimmt zu, -0,75+0,25x>0 2 y nimmt ab, -0,75+0,25x<0 y nimmt zu, -0,75+0,25x>0 Zone I x nimmt zu, 1-0,5y>0 x nimmt zu, 1-0,5y>0 Zone II 3 Die kritischen Punkte sind der Ursprung (0, 0) und (3, 2). Zur Untersuchung 4. RAUBER-BEUTE-MODELLE 135 der Gleichgewichtslagen benotigen wir die Jacobi-Matrix des Systems: 1 − 21 y − 21 x 1 y − 34 + 14 x 4 J~v = ! . Fur den Ursprung erhalt man J~v ((0, 0)) = 1 − 12 y − 12 x 1 y − 34 + 14 x 4 ! = x=0,y=0 1 0 0 − 43 ! . Diese Matrix hat die Eigenwerte λ1 = 1 und λ2 = − 34 < 0, was bedeutet, dass es sich um einen instabilen kritischen Punkt, einen Sattelpunkt handelt. Fur den anderen kritischen Punkt (3, 2) ergibt sich J~v ((3, 2)) = 1 y 2 1− 1 y 4 − 12 x − 34 + 14 x ! = x=3,y=2 0 − 32 1 2 0 ! . In diesem Fall ergeben sich die Eigenwerte aus −λ − 23 1 2 −λ 3 = λ2 + = 0 4 √ zu λ1/2 = ± i 23 . Da die Eigenwerte rein komplex sind handelt es sich um ein Zentrum (stabiler kritischer Punkt) oder einen Spiralpunkt (Strudel, instabiler kritischer Punkt). Um zu entscheiden was wirklich vorliegt, betrachten wir die Phasendierentialgleichung: 3 1 y − + x g(x, y) ẏ 4 4 ⇐⇒ y 0 (x) = y 0 (x) = = ẋ f (x, y) x 1 − 12 y − 34 + 41 x 1 − 12 y ⇐⇒ dy = dx y x mit der impliziten Losung 1 3 1 F (x, y) = ln y − y + ln x + x − C = 0. 2 4 4 Das dies geschlossene Kurven mit dem Zentrum (3, 2) sind ergibt der Plot bzw. eine Kurvendiskussion. Wir skizzieren die Kurvendiskussion: 1. Wo ist die implizit gegebene Kurve explizit nach y auosbar? Damit F (x, y) lokal auosbar ist, muss Fy ungleich Null sein. Es gilt Fy = ∂F 1 1 = − =0 ∂y y 2 fur y = 2. Fur y > 2 bzw. y < 2 ist F (x, y) also nach y auosbar. 2. Monotonieverhalten. Durch implizites Dierenzieren bestimmt man die lokalen Extrema von y(x) : 136 8. AUTONOME SYSTEME Fx y (x) = − = Fy 0 31 − 41 4x 1 − 21 y =0 fur x = 3. 3. Art des lokalen Extremums. Dazu bestimmen wir die 2. Ableitung stationären Stellen x0 : Fxx y (x0 ) = − = Fy 3 1 4 x20 00 1 y − an den 1. 2 Fur y > 2 liegt in x0 = 3 ein lokales/globales Maximum vor und fur y < 2 liegt in x0 = 3 ein lokales/globales Minimum vor. Dies wird durch den Plot der Kurven bestatigt: 5. Chaos und seltsame Attraktoren: Lorenz-Gleichungen Im Prinzip lassen sich die dargestellten Methoden fur autonome Systeme zweiter Ordnung auch auf Systeme hoherer Ordnung ubertragen. Dabei treten die folgenden Probleme auf: (1) Wird die Ordnung des Systems groer so nimmt auch die Zahl der voneinander verschiedener Falle zu und die Dimension des Phasenraumes wird ebenfalls groer. (2) Es gibt Schwierigkeiten bei der Darstellung der Trajektorien im Phasenraum, wenn dessen Dimension groer als 2 ist. (3) Es treten neue Phanomene auf, die bei Systemen der Ordnung 2 keinerlei Rolle spielen. Hierzu geben wir ein Beispiel an. 5. CHAOS UND SELTSAME ATTRAKTOREN: LORENZ-GLEICHUNGEN Beispiel 137 61. Lorenz-Attraktor. E. N. Lorenz hatte das Ziel mit Hilfe von Computern Wettermodelle fur die Wettervorhersage zu erstellen. So modellierte er durch trail-and-error ein System von 12 Gleichungen, dass das gleiche Verhalten wie das nach ihm benannte System hat. Es stellte sich namlich heraus, dass auch sehr kleine Abweichungen in den Ausgangsdaten groe Unterschiede in der Vorhersage erzeugen konnten. Mathematisch spricht man in so einem Fall von einem "schlecht gestellten\ oder "inkorrekt gestellten\ Problem. Praktisch bedeutet es, dass langfristige Wettervorhersagen unmoglich sind. Das was man Lorenz-Gleichungen nennt ist ein System von 3 gekoppelten nichtlinearen gewohnlichen Dierentialgleichungen: dx = σ(−x + y) = f (x, y, z), dt dy = rx − y − xz = g(x, y, z), dt dz = −bz + xy = h(x, y, z). dt Die 3 Parameter σ, r und b werden als reell und positiv vorausgesetzt. Wir werden uns auf einen Spezielfall konzentrieren namlich: σ = 3, b = 1 und r = 1+a2 mit a > 0. Dies entspricht einem einfachen Modell f ur Turbulenzen in der Erdatmosphare, wobei x(t) die konvektive Luftbewegung, y(t) die horizontale und z(t) die vertikale Temperaturanderung beschreibt. Wir bestimmen zunachst die Gleichgewichtslagen. Das sind die Nullstellen des nichtlinearen Systems. Aus der Gleichung −x + y = 0 folgt x = y. Dies in die zweite Geleichung eingesetzt ergibt a2 y − yz = y(a2 − z) = 0 mit den Losungen y = 0 oder z = a2 . Im ersten Fall ergibt sich fur x = y = 0 aus der dritten Gleichung z = 0 und der kritische Punkt ist der Ursprung (0, 0, 0)T . Im anderen Fall erhalt man fur x = y und z = a2 die Gleichung y2 − a2 = 0 und damit y1/2 = ±a mit a > 0. Die kritischen Punkte sind folglich: (a, a a2 )T und (−a, −a, a2 )T . Die Jacobi-Matrix zum System ist J~v (~x) = ∂f ∂x ∂g ∂x ∂h ∂x ∂f ∂y ∂g ∂y ∂h ∂y ∂f ∂z ∂g ∂z ∂h ∂z −3 3 0 = 1 + a2 − z −1 x . y x −1 Fur die kritischen Punkte ergeben sich nun die folgenden Beziehungen. −3 3 0 J~v ((0, 0, 0)T ) = 1 + a2 − z −1 x y x −1 x=y=z=0 −3 3 0 = 1 + a2 −1 0 0 0 −1 138 8. AUTONOME SYSTEME mit den Eigenwerten aus −3 − λ 3 0 2 0 1 + a −1 − λ 0 0 −1 − λ = −λ3 − 5λ2 − λ(4 − 3a2 ) + 3a2 = 0 bzw. λ3 + 5λ2 + λ(4 − 3a2 ) − 3a2 = 0 und nach dem Hurwitz-Kriterium ist wegen a0 = −a2 < 0 der Ursprung ein instabiler kritischer Punkt. F ur die anderen beiden Gleichgewichtslagen ergibt sich −3 3 0 T 2 J~v ((0, 0, 0) ) = 1 + a − z −1 x y x −1 die Eigenwerte aus −3 − λ 3 0 1 −1 − λ ±a ±a ±a −1 − λ bzw. x=y=±a, z=a2 −3 3 0 = 1 −1 ±a ±a ±a −1 = −λ3 − 5λ2 − (4 + a2 )λ − 6a2 = 0 λ3 + 5λ2 + (4 + a2 )λ + 6a2 = 0. Oensichtlich sind a0 = 6a2 > 0 a1 = 4 + a2 > 0. F ur das Hurwitz-Kriterium verbleibt zu untersuchen: a a 4 + a2 6a2 1 0 = = 20 + 5a2 − 6a2 = 20 − a2 < 0 a3 a2 1 5 und fur a2 > 20. Fur a2 > 20 sind folglich auch die anderen kritischen Punkte instabil. In diesem Falle besitzt das DGL-System beschrankte, nicht-geschlossene Losungsbahnen, die die kritischen Punkte (a, a, a2 )T und (−a, −a, a2 )T "chaotisch\ umkreisen, d.h. die Losungsbahnen springen unaufhorlich und scheinbar zufallig zwischen auslaufenden Spiralbahnen um die kritischen Punkte (a, a, a2 )T und (−a, −a, a2 )T hin und her und n ahern sich auch keiner geschlossenen Bahn. 5. CHAOS UND SELTSAME ATTRAKTOREN: LORENZ-GLEICHUNGEN 139 Die folgenden Abbildungen nden Sie unter http://de.wikipedia.org/wiki/Lorenz-Attraktor In diesem Bild ist das Konvektionsmodell mit den zugeordneten Punkten im Phasenraum dargestellt. Im 3-dimensionalen Phasenraum hat die Trajektorie die typische Schmetterlingsgestalt.