laden - Sensitec GmbH
Werbung

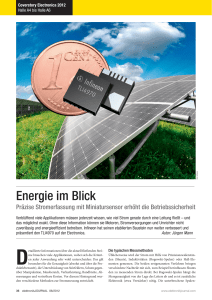
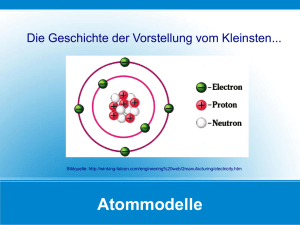
sEN SORIK U ND mESSTE C HNI K sENS ORIK UND mES S T ECHNIK Für Drehzahlbereiche über ca. 10-20 Prozent der Nenndrehzahl wird üblicherweise Rotorpositionsinformation rein passiv aus der induzierten Spannung (EMK) gewonnen. Im Bereich kleiner Drehzahlen einschließlich Stillstand werden Injektionsverfahren eingesetzt, die rotorpositionsabhängige Induktivitätsschwankungen, angeregt durch Spannungspulsen, auswerten [2]. Beide Verfahren sind Thema von intensiven Forschungsbemühungen, aber die Akzeptanz in der Industrie ist nicht so hoch wie gehofft, weil die bisher vorgestellten Lösungen entweder zusätzliche, leistungstärkere Prozessoren oder zusätzlichen Aufwand bei der Inbetriebnahme benötigt haben. Weiterhin wurde das Injektionsverfahren bisher mit störenden akustischen Geräuschen assoziiert. Um breiter akzeptiert zu werden, müssen neue Regelungsverfahren drei wesentliche Bedingungen erfüllen: n nur eine Regelung für kompletten Drehzahlbereich (keine Umschaltung) n Unempfindlichkeit gegenüber ParameterVariationen n kein zusätzliches akustisches Geräusch Durchbruch auf leisen Sohlen Neues Verfahren für die sensorlose Regelung von Permanentmagnet-Synchronmotoren Mithilfe von äußerst schnellen Stromsensoren ist es Forschern der TU München gelungen, ein neues Verfahren für die „(positions-) sensorlose“ Regelung von Permanentmagnet-Synchronmotoren umzusetzen. Dieses Verfahren ermöglicht eine hohe Regelgüte, vermeidet eine unangenehme Geräuschentwicklung auch bei niedrigen Drehzahlen und benötigt nur eine Regelung vom Stillstand bis zu hohen Drehzahlen ohne Umschaltung. Schafft damit die sensorlose Regelung den Durchbruch in der Praxis? Dr. Rolf Slatter ist Geschäftsführender Gesellschafter, Sensitec GmbH, Lahnau 2 INDUSTRIELLE AUTOMATION 6/2013 B ei der permanenterregten Synchronmaschine werden alle Maschinengrößen zum Zweck der Regelung in ein mit dem Rotorfluss synchron umlaufenden Koordinatensystem gedreht. Das setzt die Kenntnis der absoluten Rotorposition mit ausreichender Genauigkeit und zu jeder Zeit voraus. Hierzu werden Rotorlagegeber eingesetzt, welche die Rotorposition mittels elektromagnetischer, magnetischer oder optischer Sensoren ermitteln. Weite Verbreitung finden in der Antriebstechnik Inkrementalgeber auf optischer oder magnetischer Basis sowie Resolver, die die relative oder absolute Rotorposition in kodierter Form zur Verfügung stellen. Diese Rotorlagegeber erfordern jedoch eine zusätzliche Verkabelung zwischen Motor und Frequenzumrichter sowie Aufwendungen bei der weiteren Hardware, die eine störsichere Übertragung und Auswertung der Gebersignale gewährleisten. Aufgrund der verschiedenen Vorteile, die sich als Folge des Verzichts auf einen Lagegeber ergeben, werden seit Jahren Verfahren untersucht, die die indirekte Bestimmung der Rotorposition und der Drehzahl aus den elektrischen Maschinengrößen ermöglichen. Diese Verfahren werden in der Literatur mit dem Begriff “sensorlose Regelung“ (engl.: “Sensorless Control“ ) bezeichnet, wobei jedoch die Sensoren für die Stromerfassung noch vorhanden sind und, wie gleich deutlich wird, sogar dann eine besonders wichtige Rolle spielen. Am Lehrstuhl für Elektrische Antriebssysteme und Leistungselektronik wurde ein Verfahren zur sensorlosen Regelung mit verbesserten Eigenschaften kürzlich vorgestellt [3]. Dieses führt sowohl zu einer deutlichen Reduktion des akustischen Geräuschs vom Injektionsverfahren als auch zu einer Verbesserung der Güte des Schätzsignals für die Rotorlage. Hierzu wurden neue, extrem schnelle Stromsensoren auf magnetoresistiver Basis eingesetzt. Sie erlauben die Überabtastung (Oversampling) des Stromsignals mit einer Frequenz von 2 MHz. Diese Überabtastung wird zur rauscharmen Berechnung der di/dtWerte verwendet. Die di/dt-Werte lassen auf die Induktivität rückschließen und damit auf die aktuelle Winkellage des anisotropen Rotors. Die Überabtastung ermöglicht di/dtWerte mit einem deutlich geringeren Rauschanteil sowie höhere Auflösung gegenüber bisherigen Verfahren. Dadurch wird eine injektionsbasierte geberlose Regelung bei Stillstand ermöglicht. Diese Injektion ist normalerweise deutlich hörbar und schließt die Anwendbarkeit Echtzeitsystem Pentium CPU Linux RTAI C @16kHz FPGA VHDL@20Mhz ADC @20Mhz 8kHz PWM Stromsensor 02 Systemaufbau für neues Prinzip Obwohl das Thema der sensorlosen Regelung der permanenterregten Synchronmaschinen seit vielen Jahren und an vielen Stellen bearbeitet wird, hat sich bis jetzt noch keine Lösung in nennenswertem Umfang durchsetzen können. Grund dafür ist, dass die für die Rotorwinkelbestimmung auszuwertenden physikalischen Effekte sehr abhängig vom jeweiligen Betriebszustand der Maschine sind. Problematisch ist vor allem die Bestimmung bei niedriger Drehzahl bzw. im Stillstand der Maschine, da die Rückwirkung der Rotorposition auf die gemessenen Ständergrößen wegen der zur Drehzahl proportional induzierten Spannung klein bzw. Null ist. Unter diesen Umständen werden andere Verfahren benötigt, mit denen die Rotor-position aus der Auswertung drehzahlunabhängiger Effekte der Maschine bestimmt werden kann [1]. Bildquelle: Sensitec Dr. Rolf Slatter Neues Verfahren entwickelt Bildquelle: TU München Grenzen der bisherigen Verfahren 01 Stromsensoren (gelb) zur hochdynamischen Messung von Gleich- und Wechselstrom 3 INDUSTRIELLE AUTOMATION 6/2013 sEN SORIK UND mESST E C HNI K und zudem einen niedrigen Stromverbrauch und hohe Effizienz bietet. Der AMRbasierte Stromsensor weist praktisch keine Hysterese auf, wie sie in Eisenkern-basierten Hall-Sensorlösungen zu beobachten ist. Bildquelle: Peter Landsmann Ausgeklügelten Geometrie 03 Anwendungen für CMS3000 Stromsensoren sind u.a. USV-Anlagen, Schaltnetzteile sowie Umrichter Leistungsstarke Stromsensoren auf magnetoresistiver Basis Der magnetoresistive (MR) Effekt bietet eine Kombination von Bandbreite, Auflösung, Miniaturisierung und Robustheit und ist besonders für kompakte, schnelle Stromsensoren geeignet. Die Verlustleistung ist deutlich geringer als bei Shunt-Widerständen und die Response-Zeit fast eine Größenordnung schneller als bei Hall-Effekt basierenden Stromsensoren. Weiterhin verfügen MR-Stromsensoren über eine sehr hohe Bandbreite, welche für den Einsatz von neuen leistungselektronischen Technologien eine Bedingung darstellt. Die zu messende Größe ist ein differentielles Magnetfeld, auch Magnetfeld-Gradient genannt, das durch zwei Ströme mit entgegengesetzten Flussrichtungen erzeugt wird. Der Primärstrom fließt durch eine U-förmige Stromschiene und erzeugt einen Magnetfeldgradienten zwischen den beiden Seiten der Schiene. Zur Strommessung sind vier AMR (anisotrope magnetoresistiver Effekt) “Widerstände“ zu einer Wheatstone-Brücke verbunden. Die Widerstände auf dem Silizium-Chip sind so platziert, dass sie einen Differenz- 4 INDUSTRIELLE AUTOMATION 6/2013 feld-Sensor bilden. Dies ist erforderlich, um den Einfluss von Störfeldern zu eliminieren. Kombiniert mit einer Auswerteschaltung wird der Chip auf einem keramischen Substrat mit Hybrid-Schaltung bestückt [4]. Die Geometrie des Primärleiters bestimmt den Messbereich des Stromsensors. Basierend auf dem Ausgangssignal des MR-Chips erzeugt die Auswerteschaltung einen Strom Ikomp im Kompensationsleiter, der das Magnetfeld durch den Primärleiter in der Ebene des AMR Widerstands kompensiert. Mit dieser Methode erreicht das Signal eine hohe Linearität (0,1 %) und ist weitgehend unabhängig von der Temperatur. Der Kompensationsstrom verhält sich direkt proportional zum zu messenden Primärstrom und wird zum Erzeugen des Ausgangssignals des Stromsensors genutzt. Aufgrund der Kompensation des Primärfeldes (“closed-loop” principle) entsteht ein extrem kompakter Sensor, der nahezu unempfindlich gegenüber homogenen Störfeldern und Temperaturwechseln ist Sensitec www.vfmz.net/3097200 [1] J.C. Gamazo-Real, E. Vázquez-Sánchez & J. GómezGil, „Position and Speed Control of Brushless DC Motors Using Sensorless Techniques and Application Trends”, Sensors 2010, 10, 6901-6947 [2] M. Schrödl, “Dynamik und Überlastfähigkeit von sensorlosen Antrieben mit PM Synchronmaschinen einschließlich Stillstand und tiefen Drehzahlen”, VDE/VDE Tagung Antriebssysteme 2013, Nürtingen, Deutschland, 17.- 18.9.2013 [3] P. Landsmann, D. Paulus, A. Dötlinger & R. Kennel, “Silent Injection for Saliency based Sensorless Control by means of Current Oversampling“, Proc. of ICIT 2103 – IEEE International Conference on Industrial Technology, Cape Town, Südafrika, 25. - 27.02.2013 [4] S. Scherner & R. Slatter, „New applications in power electronics for highly integrated high-speed magnetoresistive current sensors“, 15th European Conference on Power Electronics and Applications, Lille, Frankreich, 03.- 05.09.2013 Bildquelle: Sensitec in vielen Bereichen aus. Der geringe Rauschgehalt der auf Überabtastung basierten di/dt Berechnung erlaubt es nun, die Injektionsamplitude etwa um einen Faktor 10 zu reduzieren, was für manche Maschinen absolute Stille bedeutet. Auf diese Weise ist eine der bislang größten Nachteile geberloser Regelung bei Stillstand überwunden. Das neue Verfahren erzielt zudem deutlich bessere Werte für den Drehzahlschätzwert, was zu einem sehr guten dynamischen Verhalten führt. Der Sensor ist für hohe Genauigkeit und das schnelle elektronische Erfassen von Strömen von DC bis zu 2 MHz ausgelegt. Im Unterschied zu Hall-Effekt basierten Sensoren ermöglicht das beschriebene System Differenzfeldmessungen dank einer ausgeklügelten Geometrie der magnetoresistiven Elemente. Dadurch ist der Sensor immun gegenüber homogenen Störfeldern und benötigt keine magnetische Abschirmung wie sie bei oberflächenmontierten Hall-Sensoren mit externer Stromschiene notwendig ist. Die Reaktionszeit liegt im Bereich von 20 ns – ein außergewöhnlicher Wert. Die schnellen CMS3000 Stromsensoren von Sensitec sind nicht nur für die sensorlose Regelung von Interesse. Überall, wo hohe Bandbreite und hohe Genauigkeit benötigt werden, sind sie vorteilhaft, z. B. in Umrichtern, DC-DC Wandlern, Laserdiodentreibern, Zustandsüberwachungen oder kabellosen Ladesystemen für Elektrofahrzeuge. 05 Funktionsprinzip des Stromsensors