Stochastische Signale
Werbung

Statistische Signaltheorie Formelsammlung
SS 2006
Grundlagen
Kombinatorik
Wahrscheinlichkeitsräume
Permutation
Anordnungsmöglichkeiten von n Elementen: Pn = n!
• Ergebnisraum Ω als Menge möglicher Ergebnisse ωi eines Zufallsgeschehens:
Ω = {ω1 , ω2 , . . .}
Anordnungsmöglichkeiten von n Elementen wobei k1 , k2 , . . . Elemente gleich sind: Pn(k) =
• Ereignis A eines Zufallsgeschehens als Teilmenge des Ergebnisraums A ⊂ Ω
• Ereignis-Algebra F als Menge von Ereignissen (Teilmengen) des Ergebnisraums
F ⊆ P (Ω)
Auswahl von k Elementen aus einer n-Menge mit Beachtung der Reihenfolge
n!
n
=
ohne Wiederholung/Zurücklegen: Vn(k) = k!
k
(n − k)!
Ai ∩ A j ∈ F
Ai \ Aj ∈ F
⇒
n!
k1 !k2 ! . . .
Variation
Achtung: F = P (Ω) (Potenzmenge) nur für abzählbare Ω
Minimalanforderungen an eine Ereignis-Algebra:
Ω∈F
C
C
A∈F ⇒ A
∈ F mit A = Ω \ A
A1 , A2 , . . . ∈ F ⇒
Ai ∈ F
c
Veit
Kleeberger
mit Wiederholung/Zurücklegen: Vn(k) = nk
i≥1
Eine Ereignisalgebra welche die Minimalanforderungen erfüllt ist eine σ-Algebra F . Das Paar (Ω, F ) heißt dann
Ereignisraum bzw. messbarer Raum.
Wenn F auf der Grundlage einer Menge G erzeugt wird, so wird diese Erzeugendensystem von F genannt.
wenn F = P ( Ω ) → |F| = 2
N Elemente
Mächtigkeit von F : |F| = Anzahl der Teilmengen (Ai ) von F
N
Definition des Wahrscheinlichkeitsmaßes
0 ≤ P (A) ≤ 1 für jedes Ereignis A
P (Ω) = 1
A ∩ B = ∅ ⇒ P (A ∪ B) = P (A) + P (B)
P(
Ai ) ≤
i≥1
Auswahl von k Elementen aus einer n-Menge ohne Beachtung der Reihenfolge
n
n!
ohne Wiederholung/Zurücklegen: Cn(k) =
=
(n − k)!k!
k
n+k−1
mit Wiederholung/Zurücklegen: Cn(k) =
k
Summenformeln
Ai ∩ Aj = ∅, i = j ⇒ P (
P (Ai )
Kombination
∞
Ai ) =
i=1
i≥1
∞
n
P (Ai )
k=1
k=0
n−1
axk = a
k=0
Rechenregeln
n−1
P (AC ) = 1 − P (A)
P (A ∪ B) = P (A) + P (B) − P (A ∩ B)
i=0
Bedingte Wahrscheinlichkeit und unabhängige Ereignisse
P (B|A) =
P (A ∩ B)
P (A)
Gesetz von
der totalen Wahrscheinlichkeit
P (A) =
P (Bi )P (A|Bi )
i∈I
f (k, l)
1
=
2
y=0
n
a
1−x
min(m,n)
f (k, k)
=
∞
xk
k=0
k=0
(−1)n+1
m<a
oder n<b
|x| < 1
k!
= ex
n n
=1
j=1
f (k,l)=0
für k=l
k=a l=b
1
1
=
n!
e
n
k=0
k
xn y n−k = (x + y)n
f (n − k) =
n
f (k)
k=0
0
k=max(a,b)
Faltung
Satz von Bayes
P (Bj )P (A|Bj )
P (Bj |A) = P (Bi )P (A|Bi )
x[n] ∗ h[n] =
P (B)P (A|B)
P (B|A) =
P (A)
∞
l=−∞
i∈I
Für unabhängige Ereignisse gilt
P (A ∩ B) = P (A) · P (B)
P (B|A) = P (B),
P (A|B) = P (A)
∞
1y
1 − xn
1−x
1
i = (n − 1)n
2
n m
P (A ∩ B)
P (B)
axk =
i=1
A ⊂ B ⇒ P (A) < P (B)
P (A|B) =
∞
2k−1 = 2n − 1
x(t) ∗ h(t) =
x[l]h[n − l] =
∞
h[l]x[n − l]
l=−∞
+∞
+∞
x(τ )h(t − τ )dτ =
h(τ )x(t − τ )dτ
−∞
−∞
2
SS 2006
Statistische Signaltheorie Formelsammlung
Zufallsvariablen
Transformation von ZV
Definition
P (X ∈ A) =
Dichtefunktion fx (x)
x
Verteilungsfunktion F
Erwartungswert E[X] oder μ
Streuung (Varianz) V ar[X] oder σ 2
Standardabweichung
P (X ∈ A) =
fx (x)dx
x∈A
A
Berechnung von fY (y) mit y = g(x)
fx (x)
F (x) =
fx (t)dt
F (x) = P (X ≤ x) =
fx (t)
t≤x
−∞
μ = xfx (x)dx
μ=
x · fx (x)
Ω
x∈Ω
2
2
2
2
σ = E[(X − μ) ] = (x − μ) fx (x)dx
σ =
(x − μ)2 fx (x)
x∈Ω
Ω
σ = V ar[X]
monoton nicht fallend
rechtsstetig
Fx (−∞) = 0
2. Für jeden Bereich den Wertebereich für x und für g(x) bestimmen.
3. y = g(x) nach x auflösen (⇒ x = g −1 (x)) für jeden Bereich (bei mehreren Lösungen gültiges x für jeweiligen
Bereich nehmen, s.o.)
4. Berechnung der Ableitung g (x) für jeden Bereich
P (a ≤ x ≤ b) = Fx (b) − Fx (a) =
• g (x) = 0
Fx (+∞) = 1
b
a
fx (x)dx
P (x ≤ a) = Fx (a)
fx (x)dx
fY (y) = fX (x)
a
Erwartungswerte
E[X + Y ] = E[X] + E[Y ]
E[g(X)] =
xw2
fX (x)dx
P (y = yi ) =
xw1
• g (x) = 0
∞
E[aX + b] = aE[X] + b
⇒ g(x) = Waagrechte im Bereich [xw1 , xw2 ] mit yi als y-Position der Waagrechten
fY (y) = P (y = yi ) · δ(y − yi )
fx (x)dx
−∞
a
P (x > a) = 1 − F (a) =
1. g(x) in Bereiche einteilen, wo sich die Definition ändert bzw. wo g(x) ein Extremum besitzt.
5. Aufstellen der Teilfunktionen für fY (y)
Verteilungsfunktionen
g(x)fX (x) bzw.
diskrete ZV
g(x)fX (x)dx
Ω
1 |g (x)| x=g−1 (y)
6. Für alle Teilbereiche wo der gültige g(x) Bereich gleich ist: Summe bilden.
x∈Ω
stetige ZV
7. Mithilfe der gefundenen g(x)-Bereiche, die (stückweise definierte) Funktion fY (y) aufstellen.
Spezialfälle
Monoton steigende Funktion g(x)
Streuungen
V ar[X] = E[X 2 ] − (E[X])2
V ar[X + Y ] = V ar[X] + V ar[Y ] + 2Cov[X, Y ]
V ar[aX] = a2 V ar[X]
n
n
n n
V ar
ai Xi =
a2i V ar(Xi ) + 2
ai aj Cov(Xi , Xj ) V ar[X − Y ] = V ar[X] + V ar[Y ] − 2Cov[X, Y ]
i=1
c
Veit
Kleeberger
i=1
V ar[X]
P (|X − μ| ≥ a) ≤
a2
Monoton fallende Funktion g(x)
FY (y) = 1 − FX (g −1 (y))
i=1 j=i+1
Tschebyschev-Ungleichung
E[X 2 ]
P (|X| ≥ a) ≤
a2
FY (y) = FX (g −1 (y))
1
P (|X − μ| ≥ kσ) ≤ 2
k
Lineare Transformation Wenn g(x) = y = ax + b ⇒ fY (y) =
1
f ( y−b )
|a| x a
FY (y) = FX ( y−b
)
a
Momente
k-tes Moment: mk = E[X k ]
k-tes zentrales Moment: zk = E[(X − E[X])k ]
Quantil, Fraktil
Ein α-Quantil ist der Zahlenwert xα , der die Unlgleichung P (X < xα ) ≤ α erfüllt
Das (schwache) Gesetz der großen Zahlen
X n = (X1 + · · · + Xn )/n
lim P X n − μ < ε = 1
∀ > 0
n→∞
3
4
Statistische Signaltheorie Formelsammlung
SS 2006
Zweidimensionale Zufallsvariable
Bedingte Verteilungen f (x|y) bzw. f (y|x)
Fxy (x, y) = P (X ≤ x, Y ≤ y) =
Verteilungsfunktion Fxy
Erwartungswerte E[g(X, Y )]
E[g(X, Y )] =
∞ ∞
−∞ −∞
∞
Randverteilungen
(Marginalisierung)
fX (x) =
fY (y) =
−∞
∞
x y
fuv (u, v)dudv
−∞ −∞
Für unabhängige Zufallsvariable X und Y gilt
fxy (x, y) = fX (x)fY (y)
E[XY ] = E[X]E[Y ]
∞
fX+Y (x) =
fX (t)fY (x − t)dt = fX (x) ∗ fY (y)
fuv (u, v)
u≤x v≤y
g(x, y)fxy (x, y)dxdy
x
fxy (x, y)dy
f (y|x) =
g(x, y)fxy (x, y)
y
fX (x) =
fxy (x, y)
fxy (x, y)dx
fY (y) =
fxy (x, y)
x
f (x, y)
fX (x)
fY (y)f (x|y)dy
fY (y) =
−∞
fX (x)f (y|x)dy
fX (x) =
fY (y)f (x|y) fY (y) =
y
−∞
fX (x)f (y|x)
x
Für unabhängige Zufallsvariable X und Y gilt
f (y|x) = fY (y)
Fxy (x, y) = FX (x)FY (y)
f (x, y)
fY (y)
∞
fX (x) =
f (x|y) = fX (x)
f (x, y) = fX (x)fY (y)
Bayes-Regel
V ar[X + Y ] = V ar[X] + V ar[Y ]
f (x|y) = ∞
fX (x)f (y|x)
fX (x)f (y|x)
f (x|y) = fX (x)f (y|x)
fX (x)f (y|x)dx
X
−∞
−∞
Bedingte Erwartungswerte
Kovarianz Cov[X, Y ]
Cov[X, Y ] = E[(X − μ1 )(Y − μ2 )]
∞
μ1 = E[X], μ2 = E[Y ]
E[X|Y ] =
Cov[X + Y, Z] = Cov[X, Z] + Cov[Y, Z]
Cov[X, Y ] = 0 ⇒ X und Y unkorreliert
E[X|Y ] =
E[Y |x]fX (x)dx
E[Y ] =
−∞
Cov[aX + b, cY + d] = acCov[X, Y ]
unkorreliert ⇒ unabhängig
∞
E[X|y]fY (y)dy
E[X] =
yf (y|x)dy
−∞
∞
X und Y unabhängig ⇒ Cov[X, Y ] = 0
Cov[aX, Y ] = aCov[X, Y ]
∞
E[Y |X] =
xf (x|y)dx
−∞
Cov[X, Y ] = E[XY ] − E[X]E[Y ] = Cov[Y, X]
Cov[X, c] = 0
f (x|y) =
∞
y
−∞
Cov[X, X] = V ar[X],
c
Veit
Kleeberger
−∞
E[Y |X] =
xf (x|y)
x
Kovarianzmatrix V ar[z]
z T = [y, x]T
2
Cov[Y, X]
σy
V ar[z] =
2
Cov[X, Y ] σx
E[X] =
E[X|y]fY (y)
E[Y ] =
y
E[Y ] = E[E[Y |X]]
V ar[X] = E[V ar[X|Y ]] + V ar[E[X|Y ]]
Cov[X, Y ]
ρ= V ar[X]V ar[Y ]
−1≤ρ≤1
ρ = 1 ⇒ korreliert
ρ = 0 ⇒ unkorreliert
E[Y |x]fX (x)
x
E[X] = E[E[X|Y ]]
Korrelationskoeffizient ρ
yf (y|x)
y
V ar[Y ] = E[V ar[Y |X]] + V ar[E[Y |X]]
Lineare Regression
ρ = −1 ⇒ antipodisch
X steht in linearer Regression mit Y, wenn E[X|y] eine lineare Funktion von y ist. In diesem Fall gilt:
x̂ = E[X|y] = μx + ρ
σx
(y − μy )
σy
(Regressionsgerade)
Steht Y in linearer Regression mit X, dann gilt
V ar[X + Y ] = V ar[X] + V ar[Y ] + 2ρ
5
V ar[X]V ar[Y ]
ŷ = E[Y |x] = μy + ρ
σy
(x − μx )
σx
(Regressionsgerade)
6
Statistische Signaltheorie Formelsammlung
SS 2006
Wahrscheinlichkeitsverteilungen
Stetige Verteilungsfunktionen
Diskrete Verteilungsfunktionen
Gleichverteilung U (a, b)
Binomialverteilung B(n, p)
n x
p (1 − p)n−x ,
f (x) = P (X = x) =
x
x = 0, 1, . . . , n
F (x) = P (X ≤ x) =
x n
i=0
σ 2 = np(1 − p)
μ = np
μ=
Geometrische Verteilung G(p)
f (x) = P (X = x) = (1 − p)x p,
x = 0, 1, 2, . . .
μ=
F (x) = P (X ≤ x) =
(1 − p)i p
σ2 =
f (x) = λe−λx
Φ(jω) =
σ2 =
⎩
0
x<a
− a) a ≤ x ≤ b
1
x>a
1
(x
b−a
(b − a)2
12
Exponentialverteilung E(λ)
x
p
1 − (1 − p)s
1−p
p
F (x) = P (X ≤ x) =
ejbω − ejaω
jω(b − a)
a+b
2
i=0
ϕ(s) =
a≤x≤b
⎧
⎨
pi (1 − p)n−i
Φ(jω) =
Φ(jω) = (1 − p + pejω )n
ϕ(s) = (1 − p + ps)n
i
1
f (x) =
b−a
c
Veit
Kleeberger
μ=
1−p
p2
x≥0
F (x) = P (X ≤ x) = 1 − e−λx
x≥0
λ
λ − jω
1
λ
σ2 =
1
λ2
Normalverteilung N (μ, σ)
Poisson-Verteilung P (λ)
f (x) = √
entsteht aus Binomialverteilung wenn p · n = λ = const. und n → ∞
P (X = x) = e−λ λx /x! x = 0, 1, 2, . . .
F (x) = P (X ≤ x) =
x
i=0
ϕ(s) = eλ(s−1)
μ=λ
Φ(jω) = e
σ2 = λ
λ(ejω −1)
e−λ λi /i!
(x−μ)2
1
e− 2σ2
2πσ
x
F (x) = P (X ≤ x) =
f (t)dt
−∞
jμω− 21 σ 2 ω 2
Φ(jω) = e
μ=μ
σ2 = σ2
N (0, 1) heißt auch Standard-Normalverteilung
Rayleigh-Verteilung R(σ)
x − x22
e 2σ
σ2
μ = σ π/2
f (x) =
7
x≥0
σ 2 = 2σ 2 (1 −
π
)
4
8
Statistische Signaltheorie Formelsammlung
Zweidimensionale (bivariate) Normalverteilung
Die zweidimensionale Zufallsvariable (X, Y ) ist N (μx , μy , σx , σy , ρ)-verteilt, wenn sie eine Dichtefunktion folgender Gestalt besitzt:
2 2
2 1
y − μy
x − μx
x − μx
1
y − μy
f (x, y) =
+
− 2ρ
exp
2(1 − ρ2 )
σx
σy
σx
σy
2πσx σy 1 − ρ2
1
1
z = [x, y]T ∧ μ = [μx , μy ]T
= exp − (z − μ)V ar[z]−1 (z − μ)T
2
2π det(V ar[z])
Die bedingte Verteilung von Y bei gegebenem X = x ist die N (μ, σ)-Verteilung mit
σy
μ = μy + ρ (x − μx ) und σ 2 = σy2 (1 − ρ2 )
σx
Verteilungsverknüpfungen
Additionstheoreme
X1
X2
X1 + X2
B(n1 , p)
B(n2 , p)
B(n1 + n2 , p)
P (λ1 )
P (λ2 )
P (λ1 + λ2 )
N (μ1 , σ1 ) N (μ2 , σ2 ) N (μ1 + μ2 ,
Verteilung von Y
E(λ)
−
N (0, σ)
N (0, σ)
λX1
E(1)
X12 + X22 R(σ)
U (a, b)
−
− λ1 ln(X1 )
Wahrscheinlichkeitserzeugende Funktion (nur für ganzzahlige Zufallsvariable)
1 dx
ϕ
(s)
PX (X = x) =
x
x! dsx
s=0
du(t)
dt
Integration
t
d
d
t aU (f ) + bU (f )
1
2
t 1 U(f )
d
t e−j2πt0 f U (f )
d
t U (f − f )
0
t j2πf U (f )
d
|k|
t 1 dU (f )
u(τ )dτ d
t U (f )( 1
j2π
1
+ 12 δ(t)) d
u(t)(− j2πt
df
j2πf
−∞
t
f
U (φ)dφ
Vertauschung
U ∗ (t) d
Gleichanteil
Dirac-Impuls
u(t) = 1
u(t) = δ(t)
u(t) = δ(t − t0 )
u(t) = σ(t)
1 |t| < T /2
u(t) =
0
sonst
−| ad t| + d |t| < a
u(t) =
0
sonst
Gauß-Impuls
e-Impuls
Sinusfunktion
Cosinusfunktion
cos x =
ejx + e−jx
2
u (f )
d
d
d
t U (f ) =
t U (f ) =
d
t U (f ) = T · si(πT f )
d
t a · d · si2 (aπf )
2αβsi(2πβt) d
e−αt
t>0
e−α|t|
u(t) = sin(2πf0 t)
u(t) = cos(2πf0 t)
sin x =
ejx − e−jx
2j
t U (f ) = δ(f )
t U (f ) = 1
d
2
d
u(t) = exp(− (απt
2)
GT )
si-Impuls
+ 12 δ(f ))
−∞
t ∗
V ar[X] = ϕ (1) + ϕ (1) − (ϕ (1))2
E[X 3 ] = ϕ (1) + 3ϕ (1) + ϕ (1)
k
−tu(t) d
E(λ)
Integraltransformationen von Verteilungen
E[X] = ϕ (1)
au1 (t) + bu2 (t)
u(kt)
u(t − t0 )
ej2πf0 t u(t)
Differentiation
Dreieck-Impuls
Verteilung von X1 Verteilung von X2 Y
E[X 2 ] = ϕ (1) + ϕ (1)
Linearität
Ähnlichkeit
Verschiebung
Rechteck-Impuls
σ12 + σ22 )
c
Veit
Kleeberger
Fourier-Transformationspaare
Sprung-Impuls
Beziehungen zwischen den Verteilungen
ϕ(s) = E[sX ]
SS 2006
d
d
d
d
e−j2πf t0
1
δ(f ) +
2
1
j2πf
t U (f ) = α T exp(−πα2 T 2 f 2 )
G
G
t U (f ) =
α |f | < β
0 sonst
1
t U (f ) =
j2πf +α
2α
t
4π 2 f 2 +α2
t U (f ) = 1 (δ(f − f ) − δ(f + f ))
0
0
2j
t U (f ) = 1 (δ(f − f ) + δ(f + f ))
2
0
0
ejx = cos x + j sin x
X1 und X2 unabhängig: ϕX1 +X2 (s) = ϕX1 (s)ϕX2 (s)
Charakteristische Funktion
Φ(ω) = E[ejωX ]
1 dk
E[X n ] = k k Φ(ω)
j dω
E[X] = −jΦ (0)
V ar[X] = −Φ (0) + (Φ (0))2
ω=0
X1 und X2 unabhängig: ΦX1 +X2 (ω) = ΦX1 (ω)ΦX2 (ω)
9
10
Statistische Signaltheorie Formelsammlung
Stochastische Signale
y[n, ω] = A(x[n, ω])
y[n + k] = A(x[n + k]) ∀k
X[n, ω] = X(ωn )
Erwartunswertfunktion
μ[n] = E[x[n]]
Varianzfunktion
Autokorrelationsfunktion
Autokovarianzfunktion
σ 2 [n] = V ar[x[n]]
=
rx [k, l] = E[x[k]x[l]]
=
Kreuzkorrelationsfunktion rx,y [k, l] = E[x[k]y[l]]
cx,y [k, l] = Cov[x[k], y[l]]
cx [k, l] = cx [l, k]
+∞
=
cx [k, l] = Cov[x[k], x[l]]
Kreuzkovarianzfunktion
=
=
=
−∞
+∞
ξfx (ξ; n)dξ
ξηfx (ξ, η; k, l)dξdη
−∞ −∞
+∞
+∞
(ξ − μξ )(η − μη )fx (ξ, η; k, l)dξdη
−∞ −∞
+∞
+∞
ξηfxy (ξ, η; k, l)dξdη
−∞ −∞
+∞
+∞
(ξ − μξ )(η − μη )fxy (ξ, η; k, l)dξdη
rxy [m, n] = E[x[m] · y[n]] = An (rx [m, n]) = h[n] ∗ rx [m, n]
∞
|h[i]| < ∞)
Spezielle Zufallsfolgen
Gaußsche Zufallsfolge s[n] = x(ωn ) + x(ωn+1 )
mit x(ωi ) = N (0, σ)
rx [k, l] = σ 2 · δ[k − l]
μx [i] = 0 ∀i
rs [k, l] = σ 2 δ[k − l − 1] + 2σ 2 δ[k − l] + σ 2 δ[k − l + 1]
μs [n] = E[s[n]] = 0
cx [k, k] = V ar[x[k]] =
An heißt A bzgl. x[n] (A(x[n]))
ry [m, n] = Am (rxy [m, n]) = Am (An (rx [m, n])) = h[m] ∗ h[n] ∗ rx [m, n]
σx2 [k]
Stationarität
n
mit x : Ω → {−δ, +δ}
x(ωi )
P (x[i] = −δ) = P (x[i] = +δ) = 0, 5
i=0
fx (ξ0 , . . . , ξn−1 ; k, k + 1, . . . , k + n − 1) = fx (ξ0 , . . . , ξn−1 ; 0, . . . , n − 1)
∀n, k
P (s[n] = r · δ) =
Schwach Stationär (WSS, wide sense stationary)
V ar[x[n]] = V ar[x[0]] ∀n
rx [k, l] = rx [k − l] ∀k, l
n+1
r+n+1
2
2−(n+1)
Moving Avarage Folge s[n] =
n→∞
1) sicher konvergent:
X[n, ω] → X(ω)
2) fast sicher konvergent:
P ( lim X[n, ω] = X(ω)) = 1
3) konvergent im quadratischen Mittel:
lim E{|x[n] − x|2 } = 0
4) konvergent in Wahrscheinlichkeit:
5) konvergent in Verteilung:
aus 3) folgt stets 4) (nicht umgekehrt).
E[s[n]] = μ
m≥n
cx [m, n] =
V ar[s[n]] = (n + 1)δ 2
E[s[n]] = 0
1
k+1
Konvergenz
11
(falls A zustandsstabil, d.h.
i=−∞
ξ 2 fx (ξ; n)dξ
−∞
+∞
+∞
−∞ −∞
A(α1 x1 [n] + α2 x2 [n]) = α1 A(x1 [n]) + α2 A(x2 [n])
E[Y [n]] = A(E[x[n]]) = h[n] ∗ E[x[n]]
Random Walk s[n] =
E[x[n]] = E[x[0]] ∀n
c
Veit
Kleeberger
LTI-Systeme
Zufallsfolgen (diskret)
rx [k, l] = rx [l, k]
SS 2006
n
x[i]
k>0
E[x[n]] = μ V ar[x[n]] = σ 2
i=n−k
((n−m)+k+1)σ 2
(k+1)2
0
für m − k ≤ n
für m − k > n
n→∞
n→∞
lim P (|x[n] − x|2 < ) = 0
n→∞
lim Fn (x) = F (x)
n→∞
1) → 5) : stark → schwach (im Prinzip)
12
Statistische Signaltheorie Formelsammlung
SS 2006
Zufallsprozesse (kontinuierlich)
Erwartunswertfunktion
LTI-Systeme
μ(t) = E[x(t)]
Varianzfunktion
Autokorrelationsfunktion
Autokovarianzfunktion
=
σ 2 (t) = V ar[x(t)]
=
rx (t1 , t2 ) = E[x(t1 )x(t2 )]
=
cx (t1 , t2 ) = Cov[x(t1 ), x(t2 )]
=
Kreuzkorrelationsfunktion rx,y (t1 , t2 ) = E[x(t1 )y(t2 )]
cx,y (t1 , t2 ) = Cov[x(t1 ), y(t2 )]
Kreuzkovarianzfunktion
=
=
+∞
−∞
+∞
y(t) = A(x(t)) = h(t) ∗ x(t)
ξfx (ξ; t)dξ
μy (t) = E[y(t)] = A(μx (t)) = h(t) ∗ μx (t)
ξ 2 fx (ξ; t)dξ
−∞
+∞
+∞
−∞ −∞
+∞
+∞
rxy (t1 , t2 ) = At2 (rx (t1 , t2 )) = h(t2 ) ∗ rx (t1 , t2 )
ξηfx (ξ, η; t1 , t2 )dξdη
(ξ − μξ )(η − μη )fx (ξ, η; t1 , t2 )dξdη
−∞ −∞
+∞
+∞
−∞ −∞
+∞
+∞
−∞ −∞
ξηfxy (ξ, η; t1 , t2 )dξdη
(ξ − μξ )(η − μη )fxy (ξ, η; t1 , t2 )dξdη
Cov[X, Y ] = E[XY ] − E[X]E[Y ] = E[(X − μx )(Y − μy )]
unkorreliert ⇒ rxy (t1 , t2 ) = μx (t1 )μy (t2 )
ry (t1 , t2 ) = h(t1 ) ∗ rxy (t1 , t2 ) = h( t1 ) ∗ h( t2 ) ∗ rx (t1 , t2 )
Falls x(t) WSS:
Sy (f ) = H(f ) · Sxy (f ) = |H(f )|2 Sx (f )
Spezielle Zufallsprozesse
Poisson-Prozess
∞
u(t − Tn )
x(t) =
orthogonal ⇒ rxy (t1 , t2 ) = 0
unabhängig ⇒ z.B. Fxy (ξ1 , ξ2 , η1 , η2 ; t1 , t2 ) = Fx (ξ1 , ξ2 ; t1 , t2 )Fy (η1 , η2 ; t1 , t2 )
t≥0
n=1
P (x(t) = i) = e−λt
Stationarität
{X(t1 ), . . . , X(tn )} und {X(t1 + h), . . . , X(tn + h)} besitzen für alle t1 , . . . , tn und h > 0 dieselbe Verteilungsfunktion.
(λt)i
,
i!
P ((x(t2 ) − x(t1 )) = n) =
V ar[x(t)] = V ar[x(0)] ∀t
rx (t1 , t2 ) = rx (t1 − t2 ) ∀t1 , t2
P ({|x(t + τ ) − x(t)| ≥ α}) ≤
SX (f ) = SX (−f )
2
(rx (0) − rx (τ ))
α2
rx (0) =
SX (f ) ≥ 0
mit τ = t2 − t1
rx (0) = rx (t, t) = E{x(t)x(t)}
Spektrale Leistungsdichte SX (f ) = F{rx } =
i
P (x(t) = k)
k=0
(λ(t2 − t1 ))n −λ(t2 −t1 )
e
n!
t1 < t2
rx (t1 , t2 ) = λ min(t1 , t2 ) + λ2 t1 t2
E[X(t)] = V ar[X(t)] = λt
y0 ∈ {−1, +1} (Anfangszustand)
y(t) = (−1)x(t) y0
Autokorrelationsfunktion rx (t1 , t2 ) = rx (t2 − t1 ) = E{X(t1 )X(t1 + τ )} = rx (τ )
|rx (t)| ≤ rx (0)
P (x(t) ≤ i) =
Zufalls-Telegraphen-Prozess
Autokovarianzfunktion cx (t1 , t2 ) = cx (t2 − t1 )
rx (−t) = rx (t)
u(t) : Einheitssprung
Tn : Zeitpunkt des Auftretens des n-ten Ereignisses
i = 0, 1, 2, . . .
Schwach Stationär (WSS, wide sense stationary)
E[x(t)] = E[x(0)] ∀t
c
Veit
Kleeberger
α>0
+∞
E[y(t)] = E[y0 ]e−2λt
rx (τ )e−j2πf τ dτ
ry (t, t + τ ) = e−2λτ
Wiener-Prozess
x(t) = √
−∞
x(t) : Poisson-Prozess
1
−ξ 2
exp(
)
2αt
2παt
E[x(t)] = 0
cx (t1 , t2 ) = α min{t1 , t2 }
SX (f )∗ = SX (f )
+∞
SX (f )df = Leistung im Zeitbereich
−∞
x(t) = αu(t) ⇒
rx (t) = α2 ru (t) SX (ω) = α2 SU (ω)
rxy (t) = αruy (t) SXY (ω) = αSU Y (ω)
ryx (t) = αryu (t) SY X (ω) = αSY U (ω)
13
x(t) = u(t) + v(t) ⇒
rx (t) = ru (t) + rv (t) + ruv (t) + rvu (t)
SX (ω) = SU (ω) + SV (ω) + SU V (ω) + SV U (ω)
rxy (t) = ruy (t) + rvy (t)
SXY (ω) = SU Y (ω) + SV Y (ω)
14
Statistische Signaltheorie Formelsammlung
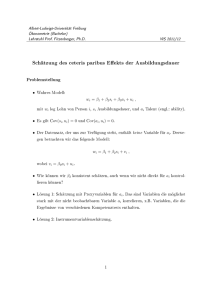
Markov Prozesse
fx (ξn |ξn−1 , ξn−2 , . . . ; tn , tn−1 , tn−2 , . . .) = fx (ξn |ξn−1 ; tn , tn−1 )
(1-Schritt-Gedächtnis)
Markov-Ketten := Markov-Prozess mit diskretem Zufallsprozess mit diskreten Zufallsvariablen.
Darstellung über Übergangsmatrix A
Beispiel:
a23
a12
a11
x=0
x=2
x=1
a21
a22
a33
a32
⎤
⎤ ⎡
⎤
P [xn−1 = 0]
P [xn = 0]
a11 a21 a31
P [xn = 1] ⎦ = ⎣ a12 a22 a32 ⎦ · P [xn−1 = 1] ⎦
P [xn = 2]
P [xn−1 = 2]
a13 a23 a33
n
Pn = A
P n−1 = A
(AP n−2 ) = A
P0
:
: :
:
n
n −1
Pn = A
P 0 = ::
QΛ
Q P0
:
: ::
aij = P (xn = j − 1|xn−1 = i − 1) < 1
15