Grundkurs Topologie - ReadingSample - Beck-Shop
Werbung

Grundkurs Topologie
Bearbeitet von
Gerd Laures, Markus Szymik
1. Auflage 2009. Taschenbuch. x, 242 S. Paperback
ISBN 978 3 8274 2040 4
Format (B x L): 17 x 24,2 cm
Gewicht: 910 g
Weitere Fachgebiete > Mathematik > Geometrie
Zu Inhaltsverzeichnis
schnell und portofrei erhältlich bei
Die Online-Fachbuchhandlung beck-shop.de ist spezialisiert auf Fachbücher, insbesondere Recht, Steuern und Wirtschaft.
Im Sortiment finden Sie alle Medien (Bücher, Zeitschriften, CDs, eBooks, etc.) aller Verlage. Ergänzt wird das Programm
durch Services wie Neuerscheinungsdienst oder Zusammenstellungen von Büchern zu Sonderpreisen. Der Shop führt mehr
als 8 Millionen Produkte.
1 Grundbegriffe der Topologie
Übersicht
1.1
Metrische Räume . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1
1.2
Topologische Räume . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7
1.3
Abgeschlossene Teilmengen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
11
1.4
Die Kategoriensprache . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
14
Die Topologie ist das Teilgebiet der Mathematik, welches sich dem Studium der stetigen
Abbildungen widmet. Der Begriff der stetigen Abbildung stellt sich schon in der Analysis
als wichtig heraus, etwa wenn es darum geht, Abbildungen zwischen metrischen Räumen
zu untersuchen, die mit der Grenzwertbildung verträglich sind. An diesen Kontext soll
hier zunächst erinnert und dann angeknüpft werden.
1.1
Metrische Räume
Definition: Eine Metrik auf einer Menge X ist eine Abbildung
d : X × X → R,
welche die folgenden drei Axiome erfüllt:
(M1) Positive Definitheit: Für alle Punkte x, y gilt d(x, y) 0 und d(x, y) = 0 genau
dann, wenn x = y.
(M2) Symmetrie: Es gilt d(y, x) = d(x, y) für alle Punkte x, y.
(M3) Dreiecksungleichung: Für je drei Punkte x, y, z ist
d(x, z) d(x, y) + d(y, z)
erfüllt.
2
1 Grundbegriffe der Topologie
Die Zahl d(x, y) wird der Abstand (d wie engl. distance) von x und y genannt. Ein
metrischer Raum ist ein Paar (X, d), bestehend aus einer Menge X und einer Metrik d
auf X. Üblicherweise wird statt des Paares (X, d) meistens nur X geschrieben.
Beispiele: Die Menge Rn der reellen n-Tupel zusammen mit der euklidischen Metrik
d(x, y) = x − y; x = x21 + x22 + · · · + x2n
ist ein metrischer Raum. Jede Teilmenge X des Rn wird ein metrischer Raum, wenn man
die Abstandfunktion d auf X einschränkt. Man spricht in diesem Fall von der induzierten
Metrik. Ein weiteres Beispiel für einen metrischen Raum ist eine Menge X zusammen
mit der diskreten Metrik
1 für x = y
d(x, y) =
.
0 für x = y
Definition: Eine Abbildung f : X → Y zwischen metrischen Räumen heißt stetig in
einem Punkt x aus X, wenn es zu jedem ε > 0 ein δ > 0 gibt, so dass für alle x aus X
mit d(x, x ) < δ gilt:
d(f (x), f (x )) < ε.
Stetige Funktionen schlechthin sind solche, die in jedem Punkt stetig sind.
Beispiele: Beispiele für stetige Abbildungen zwischen euklidischen Räumen sollten aus
der Analysis geläufig sein: Konstante Abbildungen sind stetig. Die Identität ist stetig.
Summen und Produkte stetiger Abbildungen sind stetig (wieso nochmal?). Also sind
Polynome stetig. Die Exponentialfunktion ist stetig...
Trägt der Definitionsbereich einer Abbildung die diskrete Metrik, so ist sie immer stetig.
Anschaulich bedeutet Stetigkeit, dass man die Argumente der Abbildung in einer kleinen
Umgebung variieren kann, ohne zu große Schwankungen der Funktionswerte zu erhalten.
Es lohnt sich, die Definition einer stetigen Abbildung mit ihren vier Quantoren dergestalt
zu ändern, dass man die vielen Symbole durch Begriffe ersetzt, welche die Anschauung
in die Situation transportieren. Das soll nun geschehen.
Definition: Ist x ein Punkt in einem metrischen Raum X und ε > 0, so heißt die
Teilmenge der Punkte aus X, deren Abstand zu x kleiner als ε ist, die ε-Umgebung
von x in X. Allgemeiner ist eine Umgebung von x eine Teilmenge von X, die eine εUmgebung von x enthält.
1.1 Metrische Räume
3
x
Abb. 1.1: Das ist keine Umgebung von x.
Unter Verwendung dieser Begriffe liest sich die obige Definition wie folgt:
Notiz: Eine Abbildung f : X → Y zwischen metrischen Räumen ist stetig in x, wenn
es zu jedem ε > 0 ein δ > 0 gibt, so dass die δ-Umgebung von x in die ε-Umgebung
von f (x) abgebildet wird.
Weil man erst das ε und dann dazu das δ wählt, sollte man das vielleicht auch von der
Seite her aufziehen.
Notiz: Eine Abbildung f : X → Y zwischen metrischen Räumen ist stetig in x, wenn
die Urbildmenge jeder ε-Umgebung V , also
f −1 V = { x ∈ X | f (x) ∈ V },
eine δ-Umgebung von x enthält.
Nun kann man sogar auch noch auf ε und δ verzichten.
Satz 1.1
Eine Abbildung f : X → Y zwischen metrischen Räumen ist stetig in x, wenn die Urbildmenge jeder Umgebung von f (x) eine Umgebung von x ist.
Definition: Die Teilmengen von X, die mit jedem Punkt auch eine δ-Umgebung dieses
Punktes enthalten, heißen offen. Anders gesagt, eine offene Menge ist eine Teilmenge, die
jeden ihrer Punkte umgibt.
Beispiele: Die leere Menge und X selbst sind immer offen. Die ε-Umgebung eines
beliebigen x ∈ X ist offen, denn mit jedem ihrer Elemente y liegt auch die δ-Umgebung
von y für
δ = ε − d(x, y)
noch ganz in X. Dies folgt aus der Dreiecksungleichung; siehe Schaubild.
4
1 Grundbegriffe der Topologie
y
x
δ
ε
Abb. 1.2: Die ε-Umgebungen sind offen.
Bei einer offenen Menge stellt man sich vor, dass es um jeden Punkt noch etwas Platz
gibt, der auch in der offenen Menge liegt. Jedenfalls kann man nun sagen:
Satz 1.2
Eine Abbildung zwischen metrischen Räumen ist genau dann stetig, wenn die Urbildmenge jeder offenen Menge offen ist.
Die mit diesem Satz gewonnene Charakterisierung der stetigen Abbildungen kann nun als
Ausgangspunkt zur Verallgemeinerung dienen. Die Verallgemeinerung ist dabei nicht als
Selbstzweck zu sehen. Wenn die Menge der stetigen Abbildungen nicht von der Metrik,
sondern nur vom System der offenen Teilmengen abhängt, sollte man dieser Struktur
auch einen Namen geben. Es stellt sich heraus, dass die Verallgemeinerung es zulässt,
Hilfsräume zu konstruieren, die zwar keine metrischen Räume sind, aber beim Studium
der metrischen Räume helfen. Auf diese Hilfe wird man ungern verzichten wollen.
Ergänzungen
Folgenstetigkeit. In metrischen Räumen sind stetige Abbildungen genau diejenigen, die
mit der Grenzwertbildung von Folgen verträglich sind: Eine Folge (xn ) von Elementen
des metrischen Raumes X heißt konvergent gegen x aus X, falls jede Umgebung von
x fast alle Folgenglieder enthält. Eine Abbildung f von X nach Y heißt folgenstetig,
wenn konvergente Folgen auf ebensolche abgebildet werden. Stetige Abbildungen sind
immer folgenstetig, denn das Urbild einer Umgebung von f (x) ist eine Umgebung von x
und enthält somit fast alle Folgenglieder. Umgekehrt folgt auch aus der Folgenstetigkeit
die Stetigkeit, denn angenommen f wäre nicht stetig. Dann gibt es eine Umgebung V
von f (x), deren Urbildmenge U keine Umgebung von x ist. Konstruiere eine Folge (xn )
von Elementen außerhalb von U , wobei der Abstand von xn zu x eine Nullfolge ist. Diese
Folge konvergiert gegen x, aber kein Wert f (xn ) liegt in V .
Das erste Abzählbarkeitsaxiom. Metrische Räume erfüllen das erste Abzählbarkeitsaxiom, welches besagt, dass es zu jedem Punkt x eine abzählbare Menge B(x) von Um-
1.1 Metrische Räume
5
gebungen von x mit folgender Eigenschaft gibt: Zu jeder Umgebung U von x existiert
ein V ∈ B(x) mit V ⊆ U . Zum Beispiel erfüllt
B(x) = { U1/n (x) | n ∈ N }
die Voraussetzungen. (Ein zweites Abzählbarkeitsaxiom gibt es auch; es wird auf Seite 9
erwähnt.) Die Existenz dieser abzählbar vielen Umgebungen ermöglichte die Konstruktion der Folge in dem obigen Beweis für die Äquivalenz zwischen Stetigkeit und Folgenstetigkeit. Das erste Abzählbarkeitsaxiom weist den metrischen Räumen aber auch ihre
Grenzen zu: Man kann zeigen, dass jedes System von Umgebungen auf der Menge aller Abbildungen vom Einheitsintervall [0, 1] nach R, welches die punktweise Konvergenz
von Funktionen erzeugt, das Axiom verletzt (vgl. Seite 26). Insbesondere kann es keine
Metrik zur punktweisen Konvergenz geben.
Übungen
Ü1 – Symmetrie. Sei X eine Menge. Eine Funktion d : X × X → R ist genau dann
eine Metrik, wenn
(M1’) d(x, y) = 0 ⇐⇒ x = y,
(M2’) d(x, y) d(x, z) + d(y, z) für alle x, y, z aus X gilt.
Gilt das auch, wenn (M2’) durch die übliche Dreiecksungleichung
(M3’) d(x, y) d(x, z) + d(z, y)
ersetzt wird?
Ü2 – Äquivalente Topologien. Für Punkte x = (x1 , x2 ) der Ebene R2 seien
x1 = |x1 | + |x2 |,
x2 = (x21 + x22 )1/2 ,
x∞ = max{|x1 |, |x2 |}
die üblichen Normen und d1 , d2 , d∞ die durch d? (x, y) = x − y? definierten Metriken
auf R2 . Zeigen Sie, dass diese den gleichen Konvergenzbegriff erzeugen.
Ü3 – Beschränktheit. Sei X ein metrischer Raum mit der Metrik d. Zeigen Sie, dass
durch
d(x, y)
d (x, y) =
1 + d(x, y)
eine weitere Metrik d definiert wird, die zu d topologisch äquivalent ist (d.h. zum gleichen
Konvergenzbegriff führt wie d).
Ü4 – Französisches Eisenbahnnetz. Für je zwei Punkte x, y auf der Kreisscheibe
D2 = { x ∈ R2 | x 1 }
6
1 Grundbegriffe der Topologie
sei d(x, y) = x − y, falls x und y auf derselben Gerade durch den Nullpunkt liegen,
sonst d(x, y) = x+y. Zeigen Sie, dass d eine Metrik ist und dass sie auf dem Teilraum
S 1 = { x ∈ R2 | x = 1 }
die diskrete Metrik induziert. Wie sehen die Umgebungen von (0, 0) und ( 12 , 0) aus?
Ü5 – Längen. Bekanntlich lässt sich jede Permutation f von {1, . . . , n} als Produkt
von Transpositionen benachbarter Elemente schreiben, also
f = (a1 , a1 + 1) ◦ · · · ◦ (ak , ak + 1)
mit k 0 und aj ∈ {1, . . . , n − 1} für alle j ∈ {1, . . . , k}. Eine solche Darstellung ist aber
nicht eindeutig. Die Länge L(f ) von f ist das minimale k, für welches es eine Darstellung
wie oben gibt. Berechnen Sie die Längen aller Permutationen von {1, 2, 3}. Zeigen Sie,
dass durch
dL (f, g) = L(f −1 ◦ g)
eine Metrik dL auf der Menge der Permutationen von {1, . . . , n} definiert wird.
Ü6 – Fixpunkte. Für eine Permutation f von {1, . . . , n} sei M (f ) die Anzahl der
Nichtfixpunkte von f . Zeigen Sie, dass durch
d(f, g) = M (f −1 ◦ g)
eine Metrik d auf der Menge der Permutationen von {1, ..., n} definiert wird.
Ü7 – Bewertungen. Sei p eine Primzahl. Für eine ganze Zahl a = 0 sei
vp (a) = max{n ∈ N | pn teilt a}.
Für ganze Zahlen x und y sei
dp (x, y) =
p−vp (x−y)
0
x = y
x = y.
Dann ist dp eine Metrik auf Z. (Für die mathematische Allgemeinbildung: Die Vervollständigung von Z bezüglich dieser Metrik ist wieder ein Ring, der Ring Zp der ganzen padischen Zahlen. In diesem Kontext nennt man vp (a) die p-adische Bewertung von a.)
Ü8 – Identität und Auswertung.
nen [0, 1] → R. Durch
Sei F die Menge aller stetigen Funktio-
d∞ (f, g) : = sup |f (x) − g(x)|
x
1
d2 (f, g) = (f (x) − g(x))2 dx
0
werden zwei Metriken d∞ , d2 auf F definiert. Untersuchen Sie, welche der folgenden
Abbildungen stetig sind:
1.2 Topologische Räume
7
(a) id : (F, d∞ ) −→ (F, d2 )
(b) id : (F, d2 ) −→ (F, d∞ )
(c) ev0 : (F, d∞ ) −→ R; f → f (0)
(d) ev0 : (F, d2 ) −→ R; f → f (0)
Ü9 – Unstetigkeitsstellen. Geben Sie Beispiele von Funktionen f : R → R an, die an
folgenden Stellen stetig: sind
(a) nirgends,
(b) auf der Menge aller irrationalen Zahlen R \ Q und sonst nicht,
(c) an der Stelle 0 und sonst nicht.
(d) Gibt es eine Funktion, die auf Q stetig ist und sonst nicht?
Ü10 – Das kleine Einspluseins. Gibt es eine Abbildung f : R → R, welche den
Bedingungen f (x + y) = f (x) + f (y) und f (x · y) = f (x) · f (y) für alle reellen Zahlen x
und y genügt, und die nicht stetig ist?
1.2
Topologische Räume
Sobald erkannt ist, dass man die Stetigkeit von Abbildungen zwischen metrischen Räumen durch Verwendung der offenen Mengen charakterisieren kann, ist es leicht, von
stetigen Abbildungen f : X → Y zu sprechen, selbst wenn X und Y nicht notwendig
metrische Räume sind: Es reicht, wenn gewisse Teilmengen von X und Y als offen ausgezeichnet sind. Es hat sich bewährt, von der Menge der offenen Teilmengen einige Eigenschaften zu fordern.
Definition: Eine topologische Struktur oder kurz Topologie auf einer Menge X ist eine
Menge T von Teilmengen von X, die offen genannt werden, so dass die folgenden drei
Axiome gelten:
(T1) Die Teilmengen ∅ und X sind offen.
(T2) Der Durchschnitt endlich vieler offener Mengen ist offen.
(T3) Die Vereinigung beliebig vieler offener Mengen ist offen.
8
1 Grundbegriffe der Topologie
Ein topologischer Raum ist ein Paar (X, T ), bestehend aus einer Menge X und einer topologischen Struktur T auf X. Üblicherweise wird ein topologischer Raum (X, T ) einfach
mit X bezeichnet.
Eine Teilmenge M eines topologischen Raumes X heißt Umgebung von x ∈ M , falls es
eine offene Menge U gibt, die x ∈ U ⊆ M erfüllt.
Mit (T3) ergibt sich das folgende Resultat:
Notiz: Die offenen Mengen eines topologischen Raumes sind genau diejenigen, die jeden
ihrer Punkte umgeben.
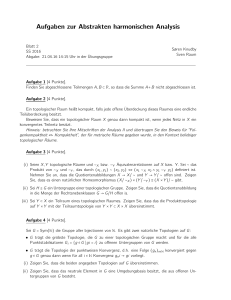
Beispiel: Es gibt viele Möglichkeiten, eine Menge mit einer Topologie zu versehen. Zum
Beispiel zeigt das Bild alle möglichen Topologien (ohne Permutationen der Elemente)
einer dreielementigen Menge.
Abb. 1.3: Die verschiedenen Topologien auf einer dreielementigen Menge.
Beispiel: Sei (X, d) ein metrischer Raum. Dann ist die Menge T (d) der offenen Mengen
eine topologische Struktur auf X. Es ist vielleicht schon klar, wieso man nicht auch
fordert, dass die Durchschnitte beliebig vieler offener Mengen wieder offen sein sollen.
Das ist nämlich in metrischen Räumen nicht richtig: Für jeden Punkt x ist zwar {x} der
Durchschnitt der ε-Umgebungen von x, aber deswegen ist die Teilmenge {x} noch lange
nicht offen. Für X = R mit der Standardmetrik stimmt das etwa nicht. Ferner beachte
man, dass es auf derselben Menge X verschiedene Metriken d = d geben kann, so dass die
dazugehörenden Topologien übereinstimmen: T (d) = T (d ) (vgl. hierzu Übungen aus 1.1).
1.2 Topologische Räume
9
Beispiel: Ist X eine beliebige Menge, so definiert die Potenzmenge von X eine Topologie auf X. Sie wird die diskrete Topologie genannt and X heißt diskreter Raum. Diese
Topologie stimmt mit der Topologie zur diskreten Metrik überein.
Beispiel: Die Klumpentopologie auf einer Menge besteht nur aus der leeren Menge und
dem Raum selbst.
Die Topologien auf einer Menge X sind durch Inklusion geordnet. Man sagt, eine Topologie T1 sei gröber als eine Topologie T2 und T2 dann entsprechend feiner als T1 ,
wenn T1 ⊆ T2 gilt, wenn also jede offene Menge von (X, T1 ) auch offen in (X, T2 ) ist.
Das ist genau dann der Fall, wenn die Identität
(X, T2 ) −→ (X, T1 )
stetig ist. Die Klumpentopologie ist die gröbste Topologie auf X, die diskrete ist die
feinste. Beispiele dazwischen – und das sind die meisten interessanten Topologien – sind
durch die metrischen Räume gegeben. Weitere folgen in den Übungen und im Verlauf
dieses Buches.
Definition: Eine Abbildung f : X → Y zwischen topologischen Räumen heißt stetig
in x, wenn die Urbilder der Umgebungen von f (x) Umgebungen von x sind. Eine
Abbildung zwischen topologischen Räumen heißt stetig, wenn die Urbildmengen offener
Mengen offen sind bzw. wenn f in jedem Punkt stetig ist.
Diese Definition wurde im vorangegangenen Abschnitt motiviert, und sie soll hier nur
der Deutlichkeit wegen nochmals wiederholt werden. Es sollte nie vergessen werden, dass
es die stetigen Abbildungen sind, die in der Topologie studiert werden; die topologischen
Räume treten nur als deren Tragflächen auf. Dennoch ist es beim Einstieg in die Topologie
oft so, dass der Begriff der stetigen Abbildung schon aus der Analysis mit Anschauung
behaftet ist, während die topologischen Räume in ihrer Allgemeinheit noch unvertraut
sind. Deswegen werden in den nächsten Abschnitten die topologischen Räume noch etwas
im Vordergrund stehen, bevor sich dann nach und nach die Erkenntnis durchsetzen wird,
dass man diese doch nur mit Hilfe der stetigen Abbildungen verstehen kann.
Ergänzungen
Metrisierbarkeit. Ein topologischer Raum (X, T ) wird metrisierbar genannt, wenn es
eine Metrik d auf X gibt, so dass T = T (d) gilt. Wir haben in den Ergänzungen des
letzten Kapitels gesehen, dass hierzu das erste Abzählbarkeitsaxiom notwendig ist. Hinreichend (für Räume, die das dritte Trennungsaxiom erfüllen, siehe Seite 47) ist das zweite
Abzählbarkeitsaxiom, welches besagt, dass man die abzählbare Menge B(x) unabhängig
von x wählen kann. Dieses ist allerdings nicht notwendig. Ein exaktes Kriterium wurde
von Bing, Nagata und Smirnov gefunden, siehe 10.B in (vQ79).
10
1 Grundbegriffe der Topologie
Konvergenz. Der Konvergenzbegriff von Folgen in topologischen Räumen ist wie bei
metrischen Räumen über die Umgebungen definiert. Allerdings kann es in allgemeinen
topologischen Räumen, anders als in metrischen Räumen, Folgen geben, die gegen zwei
verschiedene Grenzwerte konvergieren. Versieht man die Menge {0, 1} mit der Klumpentopologie, so konvergiert beispielsweise die Folge 0, 0, . . . gegen 0 und gegen 1. Erfüllt X die Hausdorff-Eigenschaft, lassen sich also je zwei Punkte durch Umgebungen
trennen (siehe Seite 47), so ist der Grenzwert immer eindeutig.
Übungen
Ü11 – Endliche-Komplemente-Topologie. Zeigen Sie: Ist X eine Menge, so bilden
alle Teilmengen von X, deren Komplemente endlich oder ganz X sind, eine Topologie
auf X.
Ü12 – Ordnungstopologie Sei X eine linear geordnetete Menge. (Das kann man
auf Seite 17 nachschlagen.) Man betrachte Teilmengen der Form {x ∈ X | a < x < b}
sowie die beiden Teilmengen {x ∈ X | k < x} und {x ∈ X | x < g}, wenn es ein kleinstes
Element k oder ein größtes Element g gibt. Die Menge der Vereinigungen solcher Mengen
ist eine Topologie auf X.
Ü13 – Mengenlehre. Sei f : X → X eine Abbildung zwischen den Mengen X und
X . Untersuchen Sie, ob die folgenden Aussagen immer gelten; und wenn nicht, so geben
Sie möglichst einfache Bedingungen für f an, die notwendig und hinreichend sind.
(a)
f (A ∪ B) = f (A) ∪ f (B)
(a’)
f −1 (A ∪ B ) = f −1 (A ) ∪ f −1 (B )
(b)
f (A ∩ B) = f (A) ∩ f (B)
(b’)
f −1 (A ∩ B ) = f −1 (A ) ∩ f −1 (B )
(c)
f (X \ A) = X \ f (A)
(c’)
f −1 (X \ A ) = X \ f −1 (A )
(d)
f −1 (f (A)) ⊆ A
(d’)
f (f −1 (A )) ⊆ A
(e)
f −1 (f (A)) ⊇ A
(e’)
f (f −1 (A )) ⊇ A
jeweils für alle A, B ⊆ X bzw. alle A , B ⊆ X .
Ü14 – Die Zariski-Topologie. Sei A ein kommutativer Ring mit Eins. Sei Spec(A) die
Menge der Primideale von A. Eine Nullstelle eines Elementes f von A ist ein Primideal P ,
so dass f /P = 0 im Restklassenring A/P gilt, also wenn f in P enthalten ist. Für jedes f
in A sei N (f ) ⊆ Spec(A) die Nullstellenmenge von f . Für jede Teilmenge S von A
sei N (S) = f ∈S N (f ) und U (S) das Komplement davon. Dann ist
{U (S) ⊆ Spec(A) | S ⊆ A}
eine topologische Struktur auf Spec(A). Solche Topologien spielen in der algebraischen
Geometrie eine grundlegende Rolle.
1.3 Abgeschlossene Teilmengen
1.3
11
Abgeschlossene Teilmengen
Definition: Eine Teilmenge A eines topologischen Raumes X heißt abgeschlossen in X,
wenn ihr Komplement X \ A offen in X ist.
Damit ist ‚abgeschlossen‘ also nicht ‚das Gegenteil von offen‘. Eine Teilmenge kann sowohl
offen in X als auch abgeschlossen in X sein, wie etwa ∅ und X in jedem Raum X. Und
es gibt Teilmengen, die weder offen noch abgeschlossen sind, etwa Q in R. Hier lauern
vermeidbare Anfängerfehler.
Notiz: Beliebige Durchschnitte und endliche Vereinigungen abgeschlossener Mengen
sind abgeschlossen.
Dies folgt direkt aus den DeMorganschen Regeln:
Das Komplement der Vereinigung ist der Durchschnitt der Komplemente.
Das Komplement des Durchschnittes ist die Vereinigung der Komplemente.
In Formeln:
X\
Ui
i∈I
X\
Ui
=
(X \ Ui )
i∈I
=
i∈I
(X \ Ui )
i∈I
Außerdem gilt die folgende Aussage (vgl. Ü9):
Notiz: Eine Abbildung f : X → Y zwischen topologischen Räumen X und Y ist genau
dann stetig, wenn die Urbilder der abgeschlossenen Teilmengen von Y alle abgeschlossen
in X sind.
Deswegen hätte man die mengentheoretische Topologie auch auf dem Begriff der abgeschlossenen Menge statt auf dem der offenen Menge aufbauen können.
Definition: Der Durchschnitt aller abgeschlossenen Mengen, die M enthalten, ist wieder eine abgeschlossene Teilmenge von X, die M enthält. Sie wird der Abschluss von M
in X genannt und mit M bezeichnet. Eine Teilmenge M eines topologischen Raumes
heißt dicht in X, wenn M = X gilt.
Beispiele: Anschaulich entspricht der Abschluss von M der Menge aller Punkte, welche
die Menge M berühren (vgl. hierzu auch die nachfolgende Ergänzung). Beispielsweise ist
der Abschluss der Teilmenge M = { 1/n | n ∈ N } von R die Menge M ∪ {0}. Jede abgeschlossene Menge A muss nämlich mit M auch den Nullpunkt enthalten, weil sonst X \ A
eine offene Umgebung von 0 ist, die M nicht schneidet. Ähnlich kann man argumentieren,
um einzusehen, dass der Abschluss von [0, 1[ in R das Intervall [0, 1] ist oder dass Q
dicht in R liegt.
12
1 Grundbegriffe der Topologie
Notiz: Eine Teilmenge M ist genau dann abgeschlossen, wenn M = M gilt. Insbesondere ist M = M .
Definition: Die Menge
◦
M = X \ (X \ M )
heißt das Innere von M . Ihr Komplement
◦
∂M = M \ M
heißt der Rand der Menge M in X.
◦
Notiz: Die Menge M ist die größte offene Menge, die in M enthalten ist.
Beispiele: Der Rand von Q in R ist R. Der Rand eines nichtausgearteten Intervalls
sind dessen Grenzen.
Definition: Eine stetige Abbildung f : X → Y zwischen topologischen Räumen X
und Y heißt abgeschlossen (beziehungsweise offen), wenn das Bild jeder abgeschlossenen
(beziehungsweise offenen) Menge von X abgeschlossen (beziehungsweise offenen) in Y ist.
Beispiele: Die Abbildung
f : R −→ R, x → x
ist sowohl abgeschlossen als auch offen. Die Abbildung
f : R −→ R, x → 0
ist abgeschlossen, aber nicht offen. Die Abbildung
f : R −→ R, x → arctan(x)
ist nicht abgeschlossen, aber offen. Die Abbildung
f : R −→ R, x → | arctan(x) |
ist weder abgeschlossen noch offen.
1.3 Abgeschlossene Teilmengen
13
Ergänzung
Berührpunkte. Ein Punkt x eines topologischen Raumes X heißt Berührpunkt
von M ⊆ X, wenn jede Umgebung von x die Menge M schneidet. Die Menge der Berührpunkte enthält M und ist abgeschlossen, denn angenommen x hat eine Umgebung U ,
die M nicht schneidet, dann können wir ohne Einschränkung U als offen annehmen.
Das Komplement von U ist also abgeschlossen und enthält M . Also enthält es auch M .
Weil U also auch den Abschluss nicht schneidet und x beliebig war, ist das Komplement der Berührpunkte offen. Elemente im Abschluss sind also stets Berührpunkte. Die
Umkehrung gilt ebenfalls: Jede abgeschlossene Menge A, die M enthält, enthält auch
die Berührpunkte, denn das Komplement von A ist eine offene Umgebung, die M nicht
schneidet.
M
Abb. 1.4: Das ist ein Berührpunkt von M .
Übungen
Ü15 – Ränder. Bestimmen Sie die Ränder der folgenden Teilmengen des R2 :
(a) M = { (x, y) | x > 0 und y = 0 }
(b) M = { (x, y) | 0 x2 − y 2 < 1 }
Ü16 – Verklebung stetiger Funktionen. Sei X = A ∪ B, und A, B seien abgeschlossen. Sei f : A → Y und g : B → Y stetig und f (x) = g(x) für alle x im Durchschnitt A ∩ B. Zeigen Sie, dass dann die Abbildung h : X → Y mit h(x) = f (x) für x ∈ A
und h(x) = g(x) für x ∈ B wohldefiniert und stetig ist.
Ü17 – Dreimal ist einmal. Ist A eine abgeschlossene Teilmenge eines topologischen
Raumes X, so auch A = X \ A. Es gilt A = A .
Ü18 – Sport. Wieviele Mengen lassen sich aus einer Teilmenge M von R durch
Abschluss- und Komplementbildung höchstens bilden?
14
1 Grundbegriffe der Topologie
Ü19 – Kuratowskis Hüllenaxiome. Seien X eine Menge und h eine Abbildung der
Potenzmenge P X in sich mit folgenden Eigenschaften:
(K1) h(∅) = ∅
(K2) A ⊆ hA
(K3) hhA = hA
(K4) h(A ∪ B) = hA ∪ hB
für alle A, B ⊆ X. Es gibt genau eine Topologie auf X, so dass für jede Teilmenge A
in X die Menge hA der Abschluss von A bezüglich dieser Topologie ist.
Ü20 – Abschluss. Eine Abbildung f zwischen topologischen Räumen ist genau dann
stetig, wenn für alle Teilmengen M der Quelle f (M ) ⊆ f (M ) gilt.
1.4
Die Kategoriensprache
Wie schon zuvor betont, wird die Klasse der topologischen Räume erst dadurch
interessant, weil man zwischen je zwei topologischen Räumen die Menge der stetigen
Abbildungen betrachten kann. Die folgende Notiz ergibt sich unmittelbar aus der Definition der Stetigkeit. Ihre Bedeutung ist deswegen aber nicht gering, ermöglicht sie es doch,
komplizierte stetige Abbildungen aus einfachen stetigen Abbildungen zusammenzusetzen.
Notiz: Ist X ein topologischer Raum, so ist die Identität idX : X → X eine stetige
Abbildung. Sind f : X → Y und g : Y → Z stetige Abbildungen, so ist auch die Komposition gf : X → Z stetig.
f −1 g −1 (W ) = (gf )−1 (W )
g −1 (W )
f
x
f (x)
X
Y
g
gf
gf (x)
Z
W
Abb. 1.5: Die Komposition stetiger Abbildungen ist stetig.
1.4 Die Kategoriensprache
15
Mit ‚gelehrten‘ Worten gesagt: Die Klasse der topologischen Räume bildet zusammen
mit den stetigen Abbildungen zwischen ihnen eine Kategorie. In diesem Abschnitt soll
erklärt werden, was das bedeutet.
Die Kategoriensprache eignet sich gut dazu, häufig wiederkehrende Phänomene und
Konstruktionen in einen einheitlichen, konzeptionellen Rahmen zu fassen. Das Lernen
der neuen Vokabeln wird sich schnell bezahlt machen. Die Standardreferenz ist (Mac98).
Definition: Eine Kategorie C besteht aus den folgenden Daten. Zunächst einer
Klasse, deren Elemente Objekte genannt werden. Dann für je zwei Objekte X
und Y einer Menge MorC (X, Y ), deren Elemente Morphismen genannt werden.
Statt f ∈ MorC (X, Y ) schreibt man oft f : X → Y . Für je drei Objekte X, Y und Z
braucht man eine Verknüpfung
MorC (Y, Z) × MorC (X, Y ) → MorC (X, Z), (g, f ) → gf,
genannt Komposition. Schließlich muss es zu jedem Objekt X ein Element idX
in MorC (X, X) geben, die Identität von X. Die einzigen Axiome, denen diese Daten
genügen sollen, sind die Assoziativität der Komposition
h(gf ) = (hg)f
und die Neutralität der Identitäten
f idX = f = idY f.
Bevor hier erste Beispiele für Kategorien genannt werden, soll das Wort ‚Klasse‘ kommentiert werden. Es wird in der Definition verwendet, weil die Objekte vieler Kategorien
keine Menge bilden und weil man die berühmten Widersprüche der Mengenlehre vermeiden will. So kann man von einer Klasse sprechen, deren Objekte die Mengen sind, nicht
aber von der Menge aller Mengen. Kategorien, deren Objekte eine Menge bilden, werden
klein genannt. Es sei an dieser Stelle empfohlen, ohne schlechtes Gewissen über diese
Feinheit hinwegzusehen, um sich gleich auf die interessanten Beispiele zu stürzen.
Beispiele: Beispiele für Kategorien gibt es in Hülle und Fülle. In vielen Beispielen
von Kategorien sind die Objekte Mengen ‚mit Struktur‘ und die Morphismen sind
die ‚strukturerhaltenden‘ Abbildungen. So gibt es etwa die Kategorie Sets der Mengen
und Abbildungen, die Kategorie Grp der Gruppen und Gruppenhomomorphismen, die
Kategorie AbGrp der abelschen Gruppen und ihrer Homomorphismen und die Kategorie der Ringe und Ringhomomorphismen. Ist K ein Körper, so gibt es die Kategorie
der K-Vektorräume und K-linearen Abbildungen. Kurz gesagt: Die Algebra ist voller
Kategorien. Und die Topologie beginnt damit, die Kategorie Top der topologischen Räume und stetigen Abbildungen zu definieren.
16
1 Grundbegriffe der Topologie
Die algebraische Topologie beschäftigt sich unter anderem damit, diese oder ähnliche
Kategorien ‚topologischer Objekte‘ in Kategorien ‚algebraischer Objekte‘ abzubilden,
um topologische Probleme dann mit algebraischer Hilfe zu bearbeiten. Die Abbildungen
zwischen Kategorien haben übrigens einen eigenen Namen: Funktoren. Sie werden aber
erst dann erklärt, wenn wir sie unbedingt brauchen: auf Seite 104.
Aus jeder Kategorie C kann die entgegengesetzte (engl. opposite) Kategorie Cop produziert
werden, indem man die Pfeilrichtungen umkehrt. Beide Kategorien haben also dieselben
Objekte, aber die Morphismen X → Y in Cop sind durch die Morphismen Y → X
in C gegeben. Das sieht auf den ersten Blick nicht sehr interessant aus, ist aber für
theoretische Zwecke sehr nützlich. So gibt es zu jeder Vokabel der Kategoriensprache
einen sogenannten ‚dualen‘ Begriff, den man durch Umdrehen aller Pfeile erhält; der
eine Begriff unterscheidet sich dann von dem anderem oft nur durch die Vorsilbe ‚ko-‘.
Beispiele werden wir alsbald kennenlernen: Produkte und Koprodukte, Faserungen und
Kofaserungen, simplizial und kosimplizial. . .
Definition: Ein Morphismus f : X → Y einer Kategorie C wird ein Isomorphismus
genannt, wenn wenn es einen Morphismus g : Y → X in die umgekehrte Richtung gibt,
so dass gf = idX und f g = idY gelten. (Man zeige, dass ein solches Inverses, falls existent,
immer eindeutig ist.) Die Isomorphismen in der Kategorie der topologischen Räume und
stetigen Abbildungen werden übrigens Homöomorphismen genannt.
Zwei topologische Räume X und Y sind demnach homöomorph, wenn es stetige Abbildungen f : X → Y und g : Y → X gibt, so dass gf = idX und f g = idY gelten. Zwei
homöomorphe Räume werden in der Topologie als gleichwertig angesehen, und eines der
Grundprobleme der Topologie besteht darin, zu unterscheiden, ob zwei gegebene Räume
homöomorph sind oder nicht. Wenn sie dann homöomorph sind, stellt sich gleich darauf
die Frage, wieviele Homöomorphismen es denn zwischen ihnen gibt.
Eine wichtige Warnung gleich an dieser Stelle: Homöomorphismen sind automatisch bijektiv, aber nicht jede stetige Bijektion ist ein Homöomorphismus. Beispielsweise können
wir jede Menge mit der diskreten Topologie und mit der Klumpentopologie versehen.
Die Identität ist dann eine stetige Abbildung von der diskreten Topologie in die Klumpentopologie. Sobald die Menge mindestens zwei verschiedene Elemente hat, ist die Umkehrabbildung aber nicht stetig. Es gibt aber Klassen topologischer Räume, zwischen
denen stetige Bijektionen schon Homöomorphismen sind. Ein entsprechender Satz findet
sich auf Seite 58.
Definition: Ein Morphismus f : X → X, also ein Endomorphismus von X, der auch ein
Isomorphismus ist, heißt auch ein Automorphismus von X. Die Automorphismen bilden
eine Gruppe bezüglich der Komposition, mit der Identität als neutralem Element, die
Automorphismengruppe AutC (X).
1.4 Die Kategoriensprache
17
Viele Gruppen treten treten als Automorphismengruppen in Erscheinung. So sind
die symmetrischen Gruppen die Automorphismengruppen der Menge {1, . . . , n}, und
die Automorphismengruppen der K-Vektorräume K n sind die allgemeinen linearen
Gruppen GL(n, K).
Beispiel: Jede Gruppe G tritt als Automorphismengruppe eines Objektes einer Kategorie auf. Beispielsweise kann man die Kategorie betrachten, die genau ein Objekt hat,
und deren (einzige) Morphismenmenge gerade G ist. Die Komposition und Identität
sind dann durch die Gruppenstruktur gegeben. Das ist dann eine kleine Kategorie, denn
sie hat nur ein Objekt. Die Automorphismengruppe dieses Objektes ist die Gruppe G.
Deswegen wird diese Kategorie selber auch mit G bezeichnet. Gruppen sind im Wesentlichen dasselbe wie kleine Kategorien, mit genau einem Objekt, dessen Endomorphismen
alle Isomorphismen sind.
Ist eine Komposition
s
r
X −→ Y −→ X
die Identität von X, also rs = idX , so heißt s ein Schnitt (oder Rechtsinverses) von r
und r eine Retraktion (oder Linksinverses) von s. Man nennt X dann auch ein Retrakt
von Y .
Ergänzung
Partiell geordnete Mengen. Eine partiell geordnete Menge ist eine kleine Kategorie,
in welcher die Morphismenmengen jeweils höchstens ein Element haben, und in welcher
jeder Isomorphismus eine Identität ist. Es wird X Y geschrieben, wenn es einen
Pfeil X → Y gibt. Eine partiell geordnete Menge ist linear geordnet, wenn es zwischen
je zwei Elementen genau einen Morphismus gibt.
Ist (X, TX ) ein topologischer Raum, so ist die Topologie TX eine Kategorie durch die
Inklusionen der offenen Teilmengen untereinander. Das ist eine partiell geordnete Menge,
die im Allgemeinen nicht linear geordnet ist. Diese Kategorien spielen in Kapitel 10 eine
große Rolle.
Die partiell geordnete Menge {0 1 2 · · · n} wird mit [n] bezeichnet. Sie ist linear
geordnet. Diese Kategorien spielen in Kapitel 11 eine große Rolle. Die Objekte von [n]
sind die n + 1 Zahlen 0, . . . , n. Es steht n demnach nicht für die Anzahl der Objekte,
sondern für die ‚Dimension‘ der Kategorie: Man stellt sich die Objekte von [n] als die
Ecken eines n-Simplizes vor (siehe dort).
18
1 Grundbegriffe der Topologie
Übungen
Ü21 – Rechts- und Linksinverse. Seien f, g, h Morphismen in einer Kategorie C, für
die gf = id und f h = id gelte. Zeigen Sie, dass dann f ein Isomorphismus ist und g = h
gilt.
Ü22 – Homöomorphie. Wieviele paarweise nicht homöomorphe topologische Räume
mit zwei Elementen gibt es? Im Allgemeinen ist die genaue Bestimmung der Anzahl
der Homöomorphieklassen endlicher Räume mit vorgegebener Zahl von Elementen ein
bisher ungelöstes Problem. Siehe etwa (Ern74) und auch (Sto66) für mehr zu endlichen
topologischen Räumen.
Ü23 – Dreimal ist keinmal. Sei T eine Topologie auf der Menge X = {1, 2, 3}.
Dann ist die Homöomorphismengruppe von (X, T ) eine Untergruppe der symmetrischen
Gruppe mit 3! = 6 Elementen. Man zeige: Es gibt keine Topologie T deren Homöomorphismengruppe genau drei Elemente hat. Gibt es überhaupt einen topologischen Raum,
dessen Homöomorphismengruppe genau drei Elemente hat?
http://www.springer.com/978-3-8274-2040-4