2. Kinematik - physik.fh
Werbung

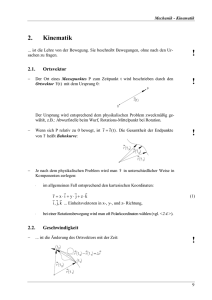
2. Kinematik Inhalt 2. Kinematik 2.1 Arten der Bewegung 2.2 Mittlere Geschwindigkeit (1-dimensional) 2.3 Momentane Geschwindigkeit (1-dimensional) 2.4 Beschleunigung (1-dimensional) 2.5 Bahnkurve 2.6 Bewegung in 3 Dimensionen 2.7 Gleichförmige Kreisbewegung 2.8 Relativbewegungen 2.9 Spezielle Relativitätstheorie Punktmasse 2. Kinematik Punktmasse Kinematik: Lehre von Bewegung (beschreibt nur) Bewegung: Änderung des Ortes (y) mit der Zeit (t), y = f(t) = y(t) Beispiele: y = k oder y = k` t Problem: Physikalische Probleme sind meist kompliziert. (Hund, Katze, Maus,...) Lösung: Idealisierung ausgedehnter Körper zur PUNKTMASSE (k, k` = Konstanten) Denkmodell Punktmasse: Körper, dessen Masse man sich in einem Punkt konzentriert denkt Punktmasse 2. Kinematik Punktmasse Modell Punktmasse anwendbar, falls … 1. der Körper nahezu punktförmig ist, z.B. e- in einem Fernsehröhre, 2. die Körperabmessungen klein gegenüber dem Abstand sind, z.B. Erde um Sonne, 3. man einen repräsentativen Punkt wählt. z.B. Schwerpunkt einer Kugel Punkt auf Autostoßstange Beschreibung von Bewegung in 1. Koordinatensystem 2. Bezugssystem r = Ortsvektor r = (x0, y0, z0) Punkte sind durch Koordinatensystem und Koordinaten bestimmt. Koordinatensystem 2. Kinematik Koordinatensystem Wahl des Koordinatensystems bestimmt durch: Notwendigkeit, Zweckmäßigkeit Wahl des Bezugssystems bestimmt durch: Notwendigkeit, Zweckmäßigkeit Man unterscheidet ruhende, gleichförmig bewegte und beschleunigte Bezugssysteme. Bahnkurve ist beschrieben durch: r(t) = (x(t), y(t), z(t)) Beispiel: r(t) = (0, 0, 0) m [Animation] 2.1 Arten der Bewegung 2. Kinematik 2.1 Arten der Bewegung 2.1 Arten der Bewegung Es gibt grundsätzlich zwei Möglichkeiten (für ausgedehnte Körper). 1. Translation [Animation] Jeder Punkt des Körpers hat die gleiche Bahnkurve = Änderung der Position 2. Rotation (Drehung) [Animation] Punkte bewegen sich auf Kreisbögen = Änderung der Orientierung 2.1 Arten der Bewegung 2. Kinematik Allgemein gilt: 2.1 Arten der Bewegung Jede Bewegung ist eine Überlagerung von [Animation] Translation und Rotation. Beispiel: Bahnkurven von Punkten auf dem Rad eines Fahrzeugs [Animation] [Animation] Beachte: Bahnkurve = f (Bezugs- und Koordinatensystems) 2.2 Mittlere Geschwindigkeit 2. Kinematik 2.2 Mittlere Geschwindigkeit 2.2 Mittlere Geschwindigkeit (1-dimensional) Annahme: Bewegung: 1-dimensional (z.B. x-Achse) Modell: Punktmasse x [Animation] Def.: Mittlere Geschwindigkeit <v> Beispiel: [Animation] 2.2 Mittlere Geschwindigkeit 2. Kinematik 2.2 Mittlere Geschwindigkeit Beispiele: negative Geschwindigkeit Typische mittlere Geschwindigkeiten: Schnecke 10-3 m/s Spaziergang 2 m/s Schnellste Mann 11 m/s Gasmoleküle 500 m/s Mond um Erde 1000 m/s e- in Fernsehröhre 107 m/s Lichtgeschwindigkeit (Vakuum) 3x108 m/s 2.3 Momentane Geschwindigkeit 2. Kinematik 2.3 Momentane Geschwindigkeit Problem: Keine Aussagen • über v zu einem bestimmten Zeitpunkt • über eine Bahnkurve 2.3 Momentane Geschwindigkeit (1-dimensional) Def.: momentane Geschwindigkeit 2.3 Momentane Geschwindigkeit 2. Kinematik 2.3 Momentane Geschwindigkeit Beispiele: 2.4 Beschleunigung 2. Kinematik 2.4 Beschleunigung 2.4 Beschleunigung Annahme: Fragen: Bewegung ist 1-dimensional. Wie schnell wird man schnell ? Wie schnell wird man langsam ? Def.: Mittlere Beschleunigung Def.: Momentane Beschleunigung 2.5 Bahnkurve 2. Kinematik 2.5 Bahnkurve 2.5 Bahnkurve aus v und a (1-dimensional) Es gilt: Beispiele: 1. v(t) = konst. = v0 2. a(t) = konst. = a0 x(t) = ? v(t) = ? , x(t) = ? Beispiel: Der freie Fall 2. Kinematik 2.6 Bewegung in 3 Dimensionen 2.6 Bewegung in 3 Dimensionen Ort einer Punktmasse durch Ortsvektor r = (x,y,z) = | r | ^r Mittlere Geschwindigkeit Momentane Geschwindigkeit Mittlere Beschleunigung Μomentane Beschleunigung Beispiel: Der freie Fall 2. Kinematik Beispiel: Der schiefe Wurf Der schiefe Wurf Beispiel einer 2-dimensionalen Bewegung: Tennisball im Gravitationsfeld Annahmen: 1. Tennisball ist punktförmig 2. Ball hat Anfangsgeschwindigkeit v0 3. Abwurfwinkel = α 4. Erdbeschleunigung a = g = konstant 5. Reibung wird vernachlässigt Frage: Wie sieht y = f(x) aus ? Bahnkurve Beispiel: Der schiefe Wurf 2. Kinematik Beispiel: Der schiefe Wurf Zum Zeitpunkt t = 0 gilt: Für Bewegung in x-Richtung gilt: Auflösen nach der Zeit ergibt: Beispiel: Der schiefe Wurf 2. Kinematik Beispiel: Der schiefe Wurf Für Bewegung in y-Richtung gilt: mit y Parabel: y(x) = ax + bx2 x Beispiel: Parabelflug 2. Kinematik Achtung Achtung !!!! Ändert sich Geschwindigkeit in Betrag und /oder Richtung liegt beschleunigte Bewegung vor !!!! Βeweis: mit folgt nach Produktregel !!!!! 2.7 Gleichförmige Kreisbewegung 2. Kinematik 2.7 Gleichförmige Kreisbewegung 2.7 Gleichförmige Kreisbewegung (|v| konst.) Im Punkt p gilt: Im Punkt q gilt: Für ∆t von p à q pq = Länge des Kreisbogens von p à q 2.7 Gleichförmige Kreisbewegung 2. Kinematik 2.7 Gleichförmige Kreisbewegung x - Richtung Für mittlere Beschleunigung < ax > gilt: y – Richtung Für mittlere Beschleunigung < ay > gilt: 2.7 Gleichförmige Kreisbewegung 2. Kinematik 2.7 Gleichförmige Kreisbewegung Wir haben: Frage: Momentane Beschleunigung in Punkt P = ? Antwort: Man mache Grenzübergang θ à 0 2.7 Gleichförmige Kreisbewegung 2.7 Gleichförmige Kreisbewegung 2. Kinematik Momentane Beschleunigung in P Betrag ) Zentripetalbeschleunigung F = m v2/r = Zentripetalkraft Ursache für Kreisbewegungen 2.7 Gleichförmige Kreisbewegung 2.7 Gleichförmige Kreisbewegung 2. Kinematik Zentripetalbeschleunigung: • ⊥ zur Tangentialgeschwindigkeit • Richtung zum Kreismittelpunkt • Ursache für Kreisbewegung Fragen: (gleichförmige Kreisbewegung) 1. Bleibt die Geschwindigkeit konstant ? 2. Ist jede Kreisbewegung eine beschleunigte Bewegung ? 3. Ist die Beschleunigung konstant ? 2.7 Gleichförmige Kreisbewegung 2. Kinematik 2.8 Relativbewegungen 2.8 Relativbewegungen Es gilt: • Die Bahnkurve eines Objektes ist nicht eindeutig. • Die Geschwindigkeit eines Objektes ist nicht eindeutig. Sie sind Funktion des Bezugssystems. Beispiel: • Ein Zug hat eine konstante Geschwindigkeit vZg. • Im Zug bewegt sich Fahrgast mit Geschwindigkeit vFg. Frage: Wie groß ist vFahrgast ? Antwort: Das hängt vom Bezugssystem ab. 2.8 Relativbewegungen 2. Kinematik 2.8 Relativbewegungen Für den Beobachter, der im Zug ruht, gilt: vFahrgast = vFg Für den Beobachter, der am Bahndamm ruht, gilt: vFahrgast = vFg + vZg v = f (Bezugssystem) 2.8 Relativbewegungen 2. Kinematik 2.8 Relativbewegungen Die Galilei-Transformation Allgemeine (abstrakte) Betrachtung (1-dimensional) Annahmen: 1. Man hat zwei Bezugssysteme A und B. 2. Bezugssystem A ruht. 3. Bezugssystem B bewegt sich mit konstanter Geschwindigkeit vB/A relativ zu A entlang der positiven x-Richtung. 4. In B ist Punktmasse P, die sich in x-Richtung bewegt. 2.8 Relativbewegungen 2. Kinematik 2.8 Relativbewegungen Es gilt für Bahnkurve xP/A (t) von P in A: xP/A = xB/A + xP/B xP/B (t) = Bahnkurve von P in Bezugssystem B xB/A (t) = Bewegung von B relativ zu A Es gilt für Geschwindigkeit vP/A: Es gilt für Beschleunigung aP/A: 2.8 Relativbewegungen 2. Kinematik 2.8 Relativbewegungen Konsequenz In Bezugssystemen, die sich relativ zueinander mit konstanter Geschwindigkeit bewegen, ist die Beschleunigung UNABHÄNGIG vom Bezugssystem. 2.8 Relativbewegungen 2. Kinematik 2.8 Relativbewegungen Ein merkwürdiges Beispiel: Zug mit vZg = 90 % der Lichtgeschwindigkeit c relativ zum Bahndamm: vZg = 0,9 c = 0,9 . 3 . 108 m/s Fahrgast mit vFg = 30 % der Lichtgeschwindigkeit relativ zum Zug: vFg = 0,3 c = 0,3 . 3 . 108 m/s Am Bahndamm ruhender Beobachter sollte messen: vFahrgast = (0,3 +0,9) c = 1,2 c > c Widerspruch zu tatsächlichen Beobachtungen! Es gilt: • Lichtgeschwindigkeit c kann nicht überschritten werden. • Obige Transformation der Geschwindigkeiten (Galilei-Transformation) v << c ist nur gültig, falls 2.9 Spezielle Relativitätstheorie 2.9. Spezielle Relativitätstheorie 2. Kinematik 2.9 Spezielle Relativitätstheorie (SRT) (1905) Wir hatten: Galilei-Transformation - 2 Inertialsysteme S, S‘ - S‘ bewegt sich mit u = konstant relativ zu S in x - Zur Zeit t = t‘ = 0 gilt O = O‘ Annahme: P bewegt sich in die + x-Richtung Für Punkt P gilt: Keine zusätzlichen Kräfte, Newton gilt, Erhaltungssätze (E, p, L) gelten 2.9.1 Experimente 2.9.1 Experimente 2. Kinematik 2.9.1 Experimente 1. Zugexperiment Theorie: Experiment: 2. Teilchenexperiment (1964 CERN) Zerfall neutraler Pionen Mittlere Lebensdauer der Pionen Prinzip: π0 à γ γ τ = 10−8 s Man bringe π0 auf v ca. c Man messe vγ (vπ0 = 0,99975 c) Theorie: (Galilei) vγ = vπ0 + c = 1,99975 c Messung: vγ = c !!!! Widerspruch !!!!!!! 2.9.1 Experimente 2.9.1 Experimente 2. Kinematik Einstein hilft mit SRT Basiert auf zwei Postulaten (nicht beweisbar): 1. Die physikalischen Gesetze sind unabhängig vom betrachteten Inertialsystem 2. Die Ausbreitungsgeschwindigkeit von Licht (elektromagnetische Welle) ist in allen Inertialsystemen gleich, unabhängig von der Bewegung der Sender (bzw. Empfänger): cVakuum = 300 000 km/s Einstein ersetzt Galilei-Transformation durch Lorentz-Transformation Für Punkt P (1-dim) mit 2.9.2 Konsequenzen der SRT 2.9.2 Konsequenzen der SRT 2. Kinematik 2.9.2 Konsequenzen der SRT 1 Transformation von Geschwindigkeiten Annahme: Masse bewegt sich entlang der x-Richtung. in Zeit dt wird in S‘ Strecke dx‘ zurückgelegt. Division 1. Gl. durch 2. Gl. und Multiplikation mit dt/dt = 1 (rechte Seite) Analog: Beispiele: v << c v = c v‘ = v – u v‘ = c Die Zeitdilatation Die Zeitdilatation 2. Kinematik Die Zeitdilatation S‘ mit u relativ zu S B‘eo in S‘ misst: ∆t‘ = 2d/c (1) Beo in S misst: mit (2) Die Zeitdilatation 2. Kinematik (1) in (2) eingesetzt: Die Zeitdilatation Quadrieren und nach ∆t auflösen : Tests zur Zeitdilatation 1. Makroskopische Uhr 1971 Atomuhr in Flugzeug 1 x um die Welt: ∆t = 200 ns 2. Mikroskopische Uhr (z.B. Myon) µ− à e− + 2ν Mittlere Lebensdauer τ = 2,2 10−6. s (Eigenzeit) 1968 CERN: vµ = 0,9966 c . Theorie: ∆t = 26,7 µs Messung: ∆t = 26,2 +- 0,5 µs Längenkontraktion Längenkontraktion 2. Kinematik Längenkontraktion Gedankenexperiment Beobachter in S‘ mit Eigenlänge l0 l Beobachter in S Länge Lineal = l Zeit: Quelle – Spiegel = ∆t1 Zeit: Spiegel − Quelle = ∆t2 Längenkontraktion 2. Kinematik Längenkontraktion Hinweg: (Quelle-Spiegel) Rückweg: (Spiegel-Quelle) Gesamtweg: Es gilt: Längenkontraktion: von S aus erscheint Lineal kürzer als in S‘ Längenkontraktion