Vorlesung 3: Die Wirkung und Lagran
Werbung

Vorlesung 3: Die Wirkung und Lagrangegleichungen 2. Art
3.1
Vorbemerkung: Extremum eines Funktionals
In der normalen Analysis einer Funktion f (x) finden wir Extrema durch die
Bedingung,
df (x)
= 0.
(3.1.1)
dx
Dieses Prinzip gilt auch fuer Funktionale.
Fuer das Extremum eines Funktionals haben wir also die Bedingung
δF [g]
= 0 fuer alle x.
δg(x)
(3.1.2)
Dies ist natuerlich eine viel kompliziertere Bedingung, da sie fuer alle x gelten
muss. Typischerweise ergibt diese Bedingung eine Differentialgleichung.
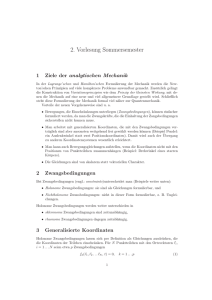
Betrachten wir ein einfaches Beispiel. Die Laenge einer Kurve f (x) (s.
y
(x2 , y2 )
ds
1
1
dy
dx
(x1 , y1 )
x
Abbildung 3.1:
Integration
infinitesimaler
Kurvensegmente ds, die über den Satz
des Pythagoras mit den
orthogonalen
Koordinaten
x und y verbunden sind:
ds2 = dx2 + dy 2 (Euklidische
Metrik ds2 = gij dxi dxj mit
gij = δij und i, j ∈ {1, 2},
beachte die Einstein’sche
Summenkonvention).
37
3. Die Wirkung und Lagrangegleichungen 2. Art
Fig. 3.1) ist durch das Funktional,
Z x2
p
dx0 1 + (f 0 (x))2
L[f ] =
38
(3.1.3)
x1
gegeben.
Wir suchen die kuerzeste Verbundungsstrecke zwischen zwei Punkten.
Also bilden wir die Funktionalableitung,
Z x2
1
δL[f ]
d
dx p
=
(3.1.4)
2f 0 (x) δ(x − y)
0
2
δf (y)
dx
2 1 + (f (x))
x1
!
d
f 0 (x)
p
= −
dx
1 + (f 0 (x))2 x=y
!
d
f 0 (y)
p
= −
.
dy
1 + (f 0 (y))2
Diese Differentialgleichung laesst sich direkt einmal integrieren (sie ist
eine totale Ableitung). Wir erhalten,
Woraus man sofort
f 0 (y)
p
= const.
1 + (f 0 (y))2
f 0 (y) = const
(3.1.5)
(3.1.6)
abliest.
Die kuerzeste Verbindung hat also eine Konstante Ableitung, und ist somit eine Gerade. Wie wir auch erwartet haben.
3.2
Die Wirkung und das Hamiltonsche Prinzip
Im letzten Semester sind wir eigentlich immer von den Newtonschen Bewegungsgleichungen,
F = mẍ
(3.2.1)
ausgegangen. Das die Kraft mit der Beschleunigung in Beziehung setzt. Dies
ist auf den ersten Blick ein sehr physikalisch motiviert.
Ein alternativer aber zugegebenermassen auf den ersten Blick etwas undurchsichtigerer Startpunkt ist das sogenannte Hamiltonsche Prinzip:
3. Die Wirkung und Lagrangegleichungen 2. Art
39
Hamiltonsches Prinzip: Fuer die Bahnkurve gilt, dass die Wirkung,
Z t2
Z t2
0
0
dt [T (q, q̇, t0 ) − V (q, t0 )]
(3.2.2)
dt L(q, q̇, t ) =
S[q] =
t1
t1
stationaer ist, d.h.
δS[q]
= 0.
δq(t)
(3.2.3)
Dabei ist
T = kinetische Energie,
V = potentielle Energie = Potential
(3.2.4)
und q sind die Koordinaten.
L = Lagrangefunktion.
(3.2.5)
t1 und t2 sind der Anfangs- bzw Endzeitpunkt. An diesen Endpunkten wird q
beim Ableiten festgehalten. Wir sind aber hauptsaechlich an der Bewegungsgleichung zwischen den Zeiten t1 und t2 interessiert.
Vorsicht: Bei der Lagrangefunktion handelt es sich NICHT um die Gesamtenergie. Das Vorzeichen zwischen kinetischer und potentialler Energie
ist wichtig,
L = T − V 6= Energie!!!.
(3.2.6)
Die Bedingung stationaerer Wirkung erlaubt, (wie fuer normale Funktionen auch), dass es sich um ein Minimum, ein Maximum oder um einen
Sattelpunkt handelt. In vielen physikalisch relevanten Situationen ist es aber
tatsaechlich ein Minimum. Deswegen wird das Hamiltonsche Prinzip oft auch
das Prinzip der kleinsten Wirkung genannt.
Das wir hier irgendwelche Koordinaten verwenden und nicht unbedingt
kartesische ist natuerlich schon ein Hinweis, zu welchem Zweck das Hamiltonsche Prinzip gut ist. Es funktioniert in beliebigen Koordinaten.
3.3
Bezug zu Newtonschen Bewegungsgleichungen
Betrachten wir das jetzt einmal fuer unsere normalen Kartesischen Koordinaten.
Betrachten wir also ein Teilchen, dass sich in einer Dimension in einem
(zeitunabhaengigen) Potential bewegt. Dann wissen wir vom letzten Semester, dass die kinetische Energie durch
1
T = mẋ2
2
(3.3.1)
3. Die Wirkung und Lagrangegleichungen 2. Art
40
gegeben.
Damit haben wir fuer die Lagrangefunktion
1
L = mẋ2 − V (x).
2
Die Wirkung ist das Funktional
Z t2
Z t2
1
1 d
0
0
2
dt
dt
S[x] =
mẋ − V (x) =
ẋ x − V (x) .
2
2 dt0
t1
t1
(3.3.2)
(3.3.3)
Nebenrechnung: Bevor wir das Hamiltonsche Prinzip anwenden zunaechst
noch eine kleine Nebenrechnung fuer Funktonalableitungen. In der letzten
Stunde haben wir erwaehnt, dass die Kettenregel auch fuer Funktionalableitungen verwendbar ist. Betrachten wir dazu einen einfachen Spezialfall, den
wir gleich verwenden werden,
Z
F [g] = dx h(g(x)),
(3.3.4)
wobei h(g) eine Funktion von g an der Stelle x ist, z.B.,
h(g) = g 2
⇒ h(g(x)) = g 2 (x).
(3.3.5)
Dann gilt (Kettenregel),
dh dh δg(x)
δ
h(g(x)) =
=
δ(x − y).
δg(y)
dg g=g(x) δg(y)
dg g=g(x)
und somit
δF [g]
=
δg(y)
Z
dh dh δ(x − y) =
.
dx dg g=g(x)
dg g=g(y)
(3.3.6)
(3.3.7)
Bilden wir also jetzt die Funktionalableitung fuer unser Hamiltonsches
Prinzip,
Z t2
δS[x]
dV
0
0 d
0
0
0
=
dt mẋ(t ) 0 δ(t − t ) −
(x(t ))δ(t − t ) (3.3.8)
δx(t)
dt
dx
t1
Z t2
dV
0
0
0
0
0
=
dt −mẍ(t )δ(t − t ) −
(x(t ))δ(t − t )
dx
t1
dV
= −mẍ(t) −
(x(t)) = 0.
dx
3. Die Wirkung und Lagrangegleichungen 2. Art
41
wobei wir auf der rechten Seite das Hamiltonsche Prinzip verwendet haben.
Damit haben wir aber genau die Newtonsche Bewegungsgleichung in einer
Dimension,
dV
=F
(3.3.9)
mẍ = −
dx
wiedergefunden.
Nach dem gleichen Verfahren kann man checken, dass sich mit
1
T = m(ẋ21 + ẋ22 + ẋ23 )
2
(3.3.10)
V = V (x1 , x2 , x3 )
(3.3.11)
und
auch die Newtonsche Bewegungsgleichung
mẍ = F
(3.3.12)
wiederfinden laesst.
3.4
Wozu also das Ganze?
Fuer die Verwendung/Beschaeftigung mit der Lagrangefunktion gibt es sowohl praktische als auch fundamentale/theoretische:
Praktische Gruende:
• Die Lagrangefunktion und das Hamiltonsche Prinzip kann man auch
mit nicht-kartesischen Koordinaten einfach anwenden.
• In Systemen mit Zwangsbedingungen laesst sich die Lagrangefunktion
oft relativ leicht bestimmen. Dazu muss man nur geeignete Koordinaten
verwenden.
Fundamentale Gruende:
• Die Lagrangefunktion kann man mit beliebigen Koordinaten verwenden
(s. unten).
• Die Lagrangefunktion spiegelt die wichtigen Symmetrien des Systems
wieder, d.h. eine Situation, die symmetrisch zu einer anderen Situation
ist, hat die gleiche Wirkung.
3. Die Wirkung und Lagrangegleichungen 2. Art
42
• Die Symmetrien des Systems schraenken die Lagrangefunktion oft schon
so ein, dass man sie mehr oder weniger daraus hinschreiben kann.
• Mit der Lgrangefunktion kann man den Zusammenhang zwischen Symmetrien und Erhaltungsgroessen herstellen, das sogenannte Noethertheorem
• Die Lagrangefunktion ist mit der Hamiltonfunktion verwandt, die in der
Mechanik nuetzlich ist, und den Standardausgangspunkt der Quantenmechanik darstellt.
• Die Lagrangefunktion ist ein moeglicher, aber wie ich finde schoenster
Ausgangspunkt der Quantenfeldtheorie,
Z
Z = Dφ exp(iS[φ])
(3.4.1)
ist das sogenannte erzeugende Funktional der Quantenfeldtheorie, aus
dem sich alles berechnen laesst.
Bis auf den letzten Punkt (und das mit der QM) werden wir alle diese
Punkte noch im Laufe dieses Semesters kennenlernen.
3.5
Generalisierte=verallgemeinerte Koordinaten
Fuer praktische Zwecke liegt der wirkliche Vorteil des Lagrangeformulismus in
der Moeglichkeit beliebige Koordinaten zu verwenden. Dies ist insbesondere
dann nuetzlich, wenn wir Zwangsbedingungen haben. Dann koennen wir die
Koordinaten naemlich so waehlen, dass sie die Zwangsbedingungen schon
automatisch erfuellen.
Betrachten wir das jetzt etwas genauer. Schon im letzten Semester haben wir das Konzept der Freiheitsgrade kennengelernt. Es gibt an wieviele
"Koordinaten"wir zur vollstaendigen Beschreibung eines Systems benoetigen. So benoetigen wir z.B. fuer ein freies Punktteilchen in drei Dimensionen
3 Koordinaten. Fuer zwei solcher Teilchen, die sich unabhaengig voneinander
bewegen koennen sind 6 Koordinaten noetig u.s.w..
Die soeben diskutierten Zwangsbedingungen verringern nun die Anzahl
der unabhaengigen Koordinaten. Im Beispiel der schiefen Ebene ist z.B. aus
gegebenem x, die zweite Koordinate y durch die Zwangsbedingung
g(x, y, t) = x sin(α) − y cos(α) = 0
(3.5.1)
3. Die Wirkung und Lagrangegleichungen 2. Art
43
eindeutig festgelegt,
y = x tan(α).
(3.5.2)
Somit benoetigen wir zur Beschreibung des Systems eine Koordinate weniger,
eine Moeglichkeit ist, z.B. die y-Koordinate nicht mehr anzugeben.
In diesem System haben wir also 2 Koordinaten und eine Zwangsbedingung. Wir haben daher nur noch einen verbleibenden Freiheitsgrad.
Generell gilt fuer holonome Zwangsbedingungen,
f = 3N − Z,
(3.5.3)
wobei N die Anzahl der Teilchen und Z die Anzahl der unabhaengigen holonomen Zwangsbedingungen ist. (Unabhaengig bedeutet dabei, dass egal welche der Zwangsbedingungen man herausgreift, diese eine weitere Einschraenkung auf den Loesungen der verbleibenden Zwangsbedingungen ist.)
Beispiel 1: Betrachten wir wieder die schiefe Ebene festgelegt durch die
Zwangsbedingung,
g(x, y, t) = x sin(α) − y cos(α) = 0.
(3.5.4)
Wie oben schon erwaehnt koennten wir einfach nur die x-Koordinate angeben
und die y-Koordinate dann aus der Zwangsbedingung berechnen.
Eine andere Moeglichkeit ist die Wegstrecke s von einem bestimmten Ausgangspunkt aus, z.B. x = y = 0, als Koordinate zu verwenden (s. Fig. 1.1(a)),
x = s cos(α),
y = s sin(α).
(3.5.5)
Beispiel 2: Betrachten wir das Pendel (s. Fig. 1.1(b)) fuer das wir die
Zwangsbedingung,
g1 (x, y, t) = x2 + y 2 − `2 = 0
(3.5.6)
haben. Hier ist der Winkel eine geeignete Koordinate. Ein guenstiger Ausgangspunkt ist die Ruhelage des Pendels, x = 0, y = −`. In diesen Koordinaten haben wir,
x = ` sin(ϕ),
y = −` cos(ϕ).
(3.5.7)
Da ` konstant ist, haben wir nur noch eine verallgemeinerte Koordinate,
naemlich ϕ.
3. Die Wirkung und Lagrangegleichungen 2. Art
3.6
44
Die Lagrange Gleichungen 2. Art
Im Prinzip koennten wir jetzt fuer unsere Beispiele, die kinetische und die
Potentielle Energie bestimmen und dann durch Funktionalableitung der Wirkung die Bewegungsgleichungen bestimmen. Allerdings koennen wir die Funktionalableitung auch ein fuer alle mal fuer den allgemeinen Fall bestimmen.
Dann brauchen wir nur noch einzusetzen.
Betrachten wir eine Lagrangefunktion die von den Koordinaten und den
ersten Ableitungen abhaengt,
L = L(q, q̇, t).
(3.6.1)
Die Bedingung, dass die Lagrangefunktion nur von den ersten Ableitungen
abhaengt ergibt sich daraus, dass die kinetische Energie nur von den ersten
Ableitungen abhaengt. Wir werden das aber spaeter noch genauer sehen.
Das Hamiltonsche Prinzip sagt dann,
Z t2
δ
dt0 L(q, q̇, t)
(3.6.2)
0 =
δq(t) t1
Z t2
∂L(q, q̇, t) d
∂L
0
0
0
=
δ(t − t ) +
δ(t − t )
dt
∂q
∂ q̇
dt0
t1
Z t2
d ∂L(q, q̇, t)
∂L
0
0
0
=
δ(t − t ) − 0
dt
δ(t − t )
∂q
dt
∂ q̇
t1
∂L(q, q̇, t)
d ∂L(q, q̇, t)
−
=
.
∂q
dt
∂ q̇
Damit haben wir die sogenannten Lagrangegleichungen 2. Art gefunden,
d ∂L(q, q̇, t)
∂L(q, q̇, t)
−
= 0.
(3.6.3)
dt
∂ q̇
∂q
3.7
Erste Anwendung: Schiefe Ebene
Wie schon erwaehnt ist
x = s cos(α),
y = s sin(α).
(3.7.1)
eine geeignete Parametrisierung.
Betrachten wir zunaechst die kinetische Energie. In kartesischen Koordinaten ist sie,
1
T = m(ẋ2 + ẏ 2 ).
(3.7.2)
2
3. Die Wirkung und Lagrangegleichungen 2. Art
45
Setzen wir nun einfach unsere neu parametrisierten Kordinaten ein, wobei wir
beachten, dass nur s von der Zeit abhaengt, waehrend der Winkel konstant
ist. Damit erhalten wir,
1
1 T = m ṡ2 cos2 (α) + ṡ2 sin2 (α) = mṡ2 .
2
2
(3.7.3)
Wie wir sehen gibt sich in unserer Parametrisierung fuer die kinetische Energie ein sehr einfacher Ausdruck. Dieser ist tatsaechlich genau das was wir
erwarten, denn die kinetische Energie haengt nur vom Betrag der Geschwindigkeit und nicht von der Richtung ab.
Nun zum Potential.
V = mgy = mgs sin(α).
(3.7.4)
Damit haben wir die Lagrangefunktion,
1
L = T − V = mṡ2 − mgs sin(α).
2
(3.7.5)
Jetzt koennen wir die Lagrangegleichungen 2. Art fuer die Koordinate s
verwenden,
d ∂L
∂L
0 =
−
.
(3.7.6)
dt ∂ ṡ
∂s
d
(mṡ) − mg sin(α))
=
dt
= ms̈ − mg sin(α).
Diese Bewegungsgleichung laesst sich mit den bekannten Methoden einfach loesen.
An dieser Stelle bestaetigen wir aber nur schnell, dass dies wieder auf die
gleichen Gleichungen, wie wir sie aus den Lagrangegleichungen 1. Art erhalten
haben fuehrt. Dazu leiten wir die Beziehung zwischen s und den Koordinaten
x und y jeweils zweimal nach der Zeit ab und setzen die Bewegungsgleichung
fuer s ein,
mẍ = ms̈ cos(α) = −mg sin(α) cos(α)
mÿ = ms̈ sin(α) = −mg sin2 (α).
Das gleiche Ergebnis wie in der ersten Vorlesung!
(3.7.7)
3. Die Wirkung und Lagrangegleichungen 2. Art
3.8
46
Was Sie koennen sollten
• Fuer ein gegebenes Funktional koennen Sie die die Gleichung aufstellen, die Extrema des Funktionals erfuellen muss (s. auch naechste Vorlesung).
• Sie koennen das Hamiltonsche Prinzip anwenden.
• Fuer einfache Zwangsbedingungen koennen Sie geeignete verallgemeinerte Koordinaten, die das System einfacher beschreiben, bestimmen.
• Fuer ein gegebenes mechanisches System koennen Sie die Lagrangefunktion aufstelle.
• Aus einer Lagrangefunktion koennen Sie die Bewegungsgleichungen ableiten (und gegebenfalls loesen).