Rheinische Friedrich-Wilhelms
Werbung

Rheinische Friedrich-Wilhelms-Universität Bonn
Institut für Informatik I
Dr. Elmar Langetepe, Andrea Eubeler, Tom Kamphans
Bewegungsplanung für Roboter, SS 2005, Blatt 10
Dienstag, 05.07.2005, 1500 c. t., Raum N 327
Wiederholung von Blatt 9:
Aufgabe 1
Berechne in folgendem Beispiel mit einer blauen und zwei roten Zellen die violetten Zellen
mit Hilfe eines Red–Blue–Merge. Beschreibe, welche Ereignisse bei den Sweeps auftreten
und wie diese behandelt werden.
p1
bitte wenden
Postanschrift:
Universität Bonn
Institut für Informatik I
Römerstr. 164, D-53117 Bonn
Telefon: (02 28) 73–4324, 4386
Fax:
(02 28) 73–4321
Email: {eubeler,kamphans}@informatik.uni-bonn.de
Aufgabe 2
Berechne Cfrei zur angegebenen Szene. Ermittle die Trapezzerlegung von Cfrei , erstelle den
Zusammenhangsgraph (Roadmap) der Trapezzerlegung und berechne durch Breitensuche
in der Roadmap einen kollisionsfreien Weg von s nach t für R.
P2
R
P3
s
t
P1
P4
Aufgabe 3
Warum werden bei dem Roadmap–Verfahren (Algorithmus 2.3) Knoten auf den vertikalen
Verlängerungen plaziert? Würde es nicht ausreichen, lediglich in die Trapeze Knoten zu
legen?
weitere Seite folgt
2
Aufgabe 4
Mache Dich nochmal mit den Definitionen 2.1 (Konfigurationsraum etc.) und 2.2 (Pfad
in topologischem Raum, z.B. in Cfrei ) vertraut.
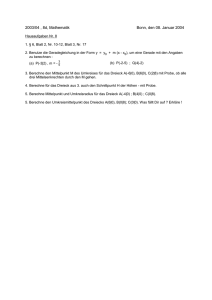
(i) Kann man das gleichseitige Dreieck aus Abbildung 1 in das gestrichelte Dreieck durch
Translation und Rotation überführen, wenn A (Schwerpunkt des Dreiecks) bzw. B
der Referenzpunkt ist? Begründe Deine Antwort.
(ii) Wie sieht Cfrei für das Dreieck mit Referenzpunkt A bzw. B aus?
A
B
Abbildung 1: Kann man das Dreieck rotieren?
Aufgabe 5
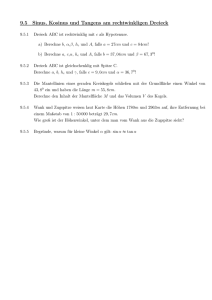
Im Beweis zu Folgerung 2.29 halten wir zwei Kontaktpaare O1 und O2 fest und beobachten, welche Kurve ein dritter Punkt S3 beschreibt. Dabei können u. a. Liniensegmente,
Ellipsenbögen und Konchoiden (siehe Abbildung 2) entstehen. Gib für jeden dieser Fälle
ein Kontaktpaar an, bei dem die entsprechende Kurve entsteht.
Abbildung 2: Konchoide
Aufgabe 6
Im Beweis zu Theorem 2.31 wurde nicht auf die kritischen Orientierungen eingegangen,
die ein Kontaktpaar vom Typ III beinhalten. Zeige, dass es nur O(m2 n2 ) solcher kritischen
Orientierungen geben kann.
bitte wenden
3
Aufgabe 7
Im Beweis zu Theorem 2.31 wurden die Funktionen fO1 O2 eingeführt.
(i) Gib ein Beispiel für ein Kontaktpaar an, bei dem fO1 O2 eine Funktion ist, die über
mehreren, nicht zusammenhängenden Intervallen definiert ist.
(ii) Ist es wichtig, daß die Anzahl der Intervalle, über denen eine Funktion fO1 O2 definiert
ist, beschränkt oder gar konstant ist?
Aufgabe 8
Das Aussehen der Funktionen fO1 O2 im Beweis zu Theorem 2.31 ist nicht genau beschrieben. Begründe genau, warum sich trotzdem je zwei Funktionen maximal 4 mal schneiden
können.
Aufgabe 9
Das Problem 3Sum ist wie folgt definiert: Gegeben sei eine Menge S ⊂ ZZ, gibt es drei Zahlen s1 , s2 , s3 in S mit s1 + s2 + s3 = 0. Der beste bekannte Algorithmus für 3Sum braucht
Zeit Θ(n2 ). Probleme, von denen man zeigen kann, daß sie mindestens so schwierig sind
wie 3Sum nennt man 3Sum–hart. Der Beweis wird dabei genauso geführt wie bei einem
NP–harten Problem: durch Reduktion von 3Sum oder eines anderen 3Sum–harten Problems auf unser Problem, wobei die Reduktion höchstens quadratischen Aufwand haben
darf.
Bei dem Problem 3Cut sind n Punkte (xi , yi ) mit xi ∈ ZZ und yi ∈ {0, 1, 2} gegeben (die
Punkte liegen also auf drei Parallelen zur X–Achse), gefragt ist, ob eine nicht–horizontale
Linie existiert, auf der drei Punkte liegen.
Bei dem Problem MotionPlanning ist eine Menge von Hindernissen in Form von
Liniensegmenten gegeben, die sich nicht schneiden, nicht berühren und achsenparallel
sind, ein Roboter R in Form eines Liniensegments sowie eine Startposition s und eine
Zielposition t. Kann sich R von s nach t bewegen?
(i) Reduziere (in linearer Zeit) 3Sum auf 3Cut.
(ii) Reduziere (in Zeit O(n log n)) 3Cut auf MotionPlanning.
4