Hilfsblätter zu Automatisierte Antriebe - antriebstechnik.fh
Werbung

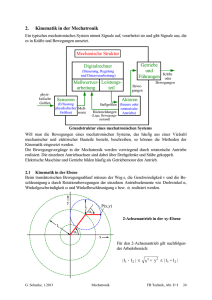
7. Kinematik in der Mechatronik Ein typisches mechatronisches System nimmt Signale auf, verarbeitet sie und gibt Signale aus, die es in Kräfte und Bewegungen umsetzt. Mechanische Struktur Getriebe und Führungen Digitalrechner (Steuerung, Regelung und Datenverarbeitung) Meßwertver- Leistungsteil arbeitung physikalische Größen Sensoren Bewegungen Kräfte oder Bewegungen Aktoren (Erfassung physikalischer MeßGrößen) werte Stellgrößen (lineare oder rotatorische Rückmeldungen Antriebe) (Lage, Bewegungszustand) Grundstruktur eines mechatronischen Systems Will man die Bewegungen eines mechatronischen Systems, das häufig aus einer Vielzahl mechanischer und elektrischer Bauteile besteht, beschreiben, so können die Methoden der Kinematik eingesetzt werden. Die Bewegungsvorgänge in der Mechatronik werden vorwiegend durch rotatorische Antriebe realisiert. Die einzelnen Antriebsachsen sind dabei über Drehgelenke und Stäbe gekoppelt. Elektrische Maschine und Getriebe bilden häufig als Getriebemotor den Antrieb. 7.1 Kinematik in der Ebene Beim translatorischen Bewegungsablauf müssen der Weg s, die Geschwindigkeit v und die Beschleunigung a durch Rotationsbewegungen der einzelnen Antriebselemente wie Drehwinkel α, & realisiert werden. Winkelgeschwindigkeit ω und Winkelbeschleunigung ε bzw. ω y l2 P(x,y) α2 2-Achsenantrieb in der xy-Ebene l1 α1 x Für den 2-Achsenantrieb gilt nachfolgender Arbeitsbereich: | l1 - l 2 | ≤ G. Schenke, 3.2003 Automatisierte Antriebe 2 x 2 + y ≤ | l1 + l 2 | FB Technik, Abt. E+I 76 Durch die Geometrie ist der Weg mit seinen xy-Komponenten gegeben. x = l1 ⋅ cos α1 + l 2 ⋅ cos (α1 + α 2 ) (7.1) y = l1 ⋅ sin α1 + l 2 ⋅ sin (α1 + α 2 ) Die Geschwindigkeit mit den Komponenten x& und y& ist die 1. Ableitung des Weges nach der Zeit. x& = − l1 ⋅ ω1 ⋅ sin α1 − l 2 ⋅ (ω1 + ω 2 ) ⋅ sin (α1 + α 2 ) (7.2) y& = l1 ⋅ ω1 ⋅ co s α1 + l 2 ⋅ (ω1 + ω 2 ) ⋅ co s (α1 + α 2 ) Die Beschleunigung mit den Komponenten &x& und &y& ist die 2. Ableitung des Weges nach der Zeit. & 1 ⋅ sin α1 − l 2 ⋅ (ω &1 +ω & 2 ) ⋅ sin (α1 + α 2 ) &x& = − l1 ⋅ ω − l1 ⋅ ω12 ⋅ co s α1 − l 2 ⋅ (ω1 + ω 2 ) 2 ⋅ co s (α1 + α 2 ) & 1 ⋅ co s α1 + l 2 ⋅ (ω &1 +ω & 2 ) ⋅ co s (α1 + α 2 ) &y& = l1 ⋅ ω (7.3) − l1 ⋅ ω12 ⋅ sin α1 − l 2 ⋅ (ω1 + ω 2 ) 2 ⋅ sin (α1 + α 2 ) Für die Dimensionierung des Antriebes für jede Achse sind das entsprechende Widerstandsmoment MW(α), die Winkelgeschwindigkeit ω, die Winkelbeschleunigung und das Massenträgheitsmoment J(α) (bezogen auf die jeweilige Achse) erforderlich. Da das Massenträgheitsmoment J(α) vom Drehwinkel α abhängt, ist es während des Bewegungsvorganges auch zeitabhängig. Das Antriebsdrehmoment M der jeweiligen Achse muß exakt nach Gl. 7.4 berechnet werden. dω 1 dJ(α ) M = M W (α) + J(α) ⋅ + ⋅ω⋅ (7.4) dt 2 dt Das Massenträgheitsmoment J(α) wird mit Hilfe des Steiner´schen Satzes berechnet. Für die Dimensionierung von Antrieben in der Mechatronik ist häufig nur das größte Antriebsdrehmoment von Interesse. Hieraus können die größten Winkelbeschleunigungen bei maximaler Nutzlast bzw. abhängig von der Nutzlast berechnet werden. Im allgemeinen bestimmen die Beschleunigungsmomente die maximalen Antriebsdrehmomente in der Mechatronik. Aus Gl. 7.1 kann zunächst der Drehwinkel α1 und anschließend der Drehwinkel α2 berechnet werden. Aus Gl. 7.2 können bei bekannten Drehwinkeln α1 und α2 die Winkelgeschwindigkeiten ω1 und ω2 berechnet werden. Für Servoantriebe sind damit die Lage (Drehwinkel α) und die Drehzahl n (Winkelgeschwindigkeit ω) bestimmt. Für die maximale Antriebsleistung der Servoantriebe (Dimensionierung des & 1 und ω & 2 aus Gl. Servoantriebes) müssen zusätzlich die maximalen Winkelbeschleunigungen ω 7.3 ermittelt werden. 7.2 Kinematik im Raum r r r Im Newton´schen Grundgesetz m ⋅ a = Σ F präsentiert die Kraft F die Kinetik des Systems, die r Masse m die Trägheit und die Beschleunigung a die Kinematik. r Die Bewegung eines realen Systems ist vollständig beschrieben, wenn der Ortsvektor r (t) für alle Systemteile bestimmt ist. Für die meisten technischen Systeme muß diese Aufgabe nur näherungsweise durch Modelle gelöst werden. Das einfachste Modell eines Körpers ist der Massenpunkt. Die aktuelle Position eines Massenpunktes zu einem Zeitpunkt t ist durch nachfolgenden Ortsvektor gegeben: r r r r (7.5) r (t) = x(t) ⋅ e x + y(t) ⋅ e y + z(t) ⋅ e z G. Schenke, 3.2003 Automatisierte Antriebe FB Technik, Abt. E+I 77 P (t) ∆r (t) y P (t + ∆t) r (t) Bewegung eines Massenpunktes P in einem kartesischen Koordinatensystem r (t + ∆t) y (t) ey ez 0 ex x Die aktuelle Position auf der Bahnkurve, die der Massenpunkt im Raum beschreibt, ergibt sich zu einem Zeitpunkt t + ∆t als z r x (t) der Ortsvektor r (t + ∆t) , der gegenüber r r r (t) einen Zuwachs um ∆ r (t) aufweist. r r r Die drei Einheitsvektoren e x , e y und e z stehen senkrecht aufeinander. Das kartesische Koordinatensystem wird als im Raum ruhend oder geradlinig gleichförmig bewegt angenommen. In einem kartesische Koordinatensystem (Inertialsystem) sind die Einheitsvektoren von der Zeit unabhängig, deren Ableitungen nach der Zeit sind gleich Null. r In Matrizenschreibweise gilt für den Ortsvektor r (t) : z (t) x(t) r r (t) = y(t) z(t) (7.6) r r Durch Ableitung des Ortsvektors r (t) nach der Zeit erhält man die Geschwindigkeit v (t) des Massenpunktes P auf der Bahnkurve. x& (t) r r r r v(t) = x& (t) ⋅ e x + y& (t) ⋅ e y + z& (t) ⋅ e z = y& (t) z& (t) r r Durch Ableitung der Geschwindigkeit v (t) erhält man die Beschleunigung a (t) : (7.7) &x&(t) r r r r a(t) = &x&(t) ⋅ e x + &y&(t) ⋅ e y + &z&(t) ⋅ e z = &y&(t) (7.8) &z&(t) Der Geschwindigkeitsvektor tangiert stets die Bahnkurve und kann auch in einem sogn. natürlichen Koordinatensystem dargestellt werden. G. Schenke, 3.2003 Automatisierte Antriebe FB Technik, Abt. E+I 78 y eb Bahnkurve an ey 0 Mitbewegtes, natürliches Koordinatensystem ∆r (t) en r (t) ez a et ∆s a t a r (t + ∆t) x ex z Im natürlichen Koordinatensystem ist ein dem Massenpunkt begleitendes orthogonales Dreibein mit den Koordinatenachsen t, n und b, die die sogn. Schmiegungsebene festlegen. Hierbei ist t die Tangentenrichtung in der Schmiegungsebene, n ist die Normalenrichtung in der Schmiegungsebene und b ist die Binormalenrichtung senkrecht zu t und n. Im natürlichen Koordinatensystem gilt: r r r r d r (t) d r ds v(t) = = ⋅ = et ⋅ v dt ds dt r Dabei ist e t der Tangenteneinheitsvektor. Der Betrag der Geschwindigkeit ist: r ds |v| = v = = dt v 2x + v 2y + v 2z = 2 x& 2 + y& + z& 2 In natürlichen Koordinaten ausgedrückt beträgt die Beschleunigung: r r r dv de t d r a(t) = + ⋅ (e t ⋅ v) = e t ⋅ ⋅v dt dt dt (7.9) (7.10) (7.11) Für die Ableitung des Einheitsvektors in Tangentenrichtung nach der Zeit gilt: r r r de t de t de t ds 1 r dϕ r ⋅ ⋅v = ⋅ en ⋅ v (7.12) en ⋅ v = = = R ds ds dt ds dt r Der Beschleunigungsvektor a (t) liegt immer in der Schmiegungsebene. Seine Komponenten in Tangential- und Normalrichtung heißen Tangential- und Normalbeschleunigung. r r r r v2 r a(t) = v& ⋅ e t + ⋅ e n = a t + a n R (7.13) R ist der Krümmungsradius der Bahnkurve. Die Normalbeschleunigung ist stets zum Krümmungsmittelpunkt M gerichtet, also immer eine Zentripetalbeschleunigung. Für den Betrag der Beschleunigung gilt: r |a| = a = a 2x + a 2y + a 2z = G. Schenke, 3.2003 v& 2 + v4 = R2 a 2t + a 2n Automatisierte Antriebe (7.14) FB Technik, Abt. E+I 79 Die Bewegung des starren Körpers im Raum kann beschrieben werden, wenn die Lage von zwei beliebigen Punkten P1 und P2 des starren Körpers verfolgt wird. Die voneinander abhängigen r r Ortsvektoren r1 und r2 erfordern sechs Koordinatenangaben. Die Lage des starren Körpers im Raum wird häufig durch die drei Koordinaten eines Punktes des Starrkörpers in einem Bezugssystem und drei Winkelangaben beschrieben. Die Winkel geben die Verdrehung der Achsen eines körpereigenen Koordinatensystems, zu den Achsen des ortsfesten Bezugssystems an, und zwar für den betrachteten Punkt. Man bezeichnet die drei kartesischen Koordinaten des Punktes P im Bezugssystem auch als Position des Punktes und die drei Winkelkoordinaten als Orientierung des Punktes des starren Körpers. Die Absolutbewegung eines Starrkörpers wird durch vektorielle Überlagerung der Führungsbewegung (Position) und der Relativbewegung (Orientierung) ermittelt. Die einfachste räumliche Bewegung erfolgt mit drei linearen Achsen, die orthogonal aufeinander stehen. Durch die reine Translation im Raum verändert sich nur die Position P. Die Bewegung kann mit den Gleichungen 7.5 bis 7.8 berechnet werden. Mit Linearantrieben oder Laufkränen mit Laufkranbrükke, Laufkrankatze und Laufkranhubwerk werden diese Bewegungen technisch realisiert. Der durch keine Bindungen gefesselte starre Körper hat im Raum 6 Freiheitsgrade. Um seine Lage eindeutig zu beschreiben sind daher 6 Koordinatenangaben erforderlich. Häufig sind die Bewegungsmöglichkeiten von einer Kette von starren Körpern durch Bindungen an vorgegebene Bahnen oder durch Fixierung einzelner Punkte der Kette eingeschränkt. Bei einem aus verschiedenen starren Körpern bestehenden Mehrkörpersystem kann jeder einzelne Körper solchen Bindungen unterworfen sein, außerdem können sie untereinander gekoppelt sein. Diese Kopplungen können starr (Gelenke, Stäbe) oder nicht starr (elastische Federn) sein. Kopplungen, die nicht starr sind schränken die Anzahl der Freiheitsgrade des Einzelkörpers nicht ein, es wirken aber über die Kopplungselemente Kräfte zwischen den Körpern, die bei Problemen in der Kinetik berücksichtigt werden müssen. Starre Kopplungen (kinematische Kopplungen) schränken die Anzahl der Freiheitsgrade ein, da zwischen den Koordinaten, die die Lage der Körper beschreiben, feste Beziehungen, sogn. Zwangsbedingungen, bestehen. Die Anzahl der Koordinaten, die dann mindestens erforderlich ist, um die Lage eines Systems starrer Körper zu beschreiben, entspricht der Anzahl der Freiheitsgrade des Systems. Besteht ein Roboterarm aus α1 einer kinematischen Kette l3 von Einzelkörpern (Glieder), l1 α3 die jeweils durch ein Drehgelenk miteinander gekopα2 pelt sind, so hat jeder Einzelkörper aufgrund der Einl2 schränkung der Bewegungsα4 l4 möglichkeit auf eine Rotation nur einen Freiheitsgrad. l0 y Roboterarm als kinematische Kette P (x, y, z) mit 5 Freiheitsgraden x0, y0, z0 α5 x z G. Schenke, 3.2003 Automatisierte Antriebe FB Technik, Abt. E+I 80 x = (l1 + l 2 ⋅ cos α 2 + l 3 ⋅ cos (α 2 + α 3 ) + l 4 ⋅ cos (α 2 + α 3 + α 4 )) ⋅ cosα1 y = l 0 + l 2 ⋅ sin α 2 + l 3 ⋅ sin (α 2 + α 3 ) + l 4 ⋅ sin (α 2 + α 3 + α 4 ) (7.15) z = (l1 + l 2 ⋅ cos α 2 + l 3 ⋅ cos (α 2 + α 3 ) + l 4 ⋅ cos (α 2 + α 3 + α 4 )) ⋅ sinα1 Abhängig von der Zeit kann ein Punkt P im Raum mit den Koordinaten x, y, z durch den r Ortsvektor r (t) beschrieben werden. Da mit dem 5-Achsen-Roboter nur 5 Freiheitsgrade zur Verfügung stehen, können neben den Raumkoordinaten P(x, y, z) im Arbeitsbereich nur zwei von drei Orientierungen im Raum erreicht werden. Es sind dieses die Orientierungen α2 + α3 + α4 und α5. r r Mit den Gl. 7.15 und 7.5 bzw. 7.6 erhält man den Ortsvektor r (t) . Die Geschwindigkeit v (t) r erhält man entsprechend Gl. 7.7 und die Beschleunigung a (t) entsprechend Gl. 7.8. Das Antriebsdrehmoment M der jeweiligen Achse muß nach Gl. 7.4 berechnet werden. Die Berechnung der Drehwinkel α (Lage) und der Winkelgeschwindigkeiten ω (Drehzahl) für die einzelnen Achsen ist sehr aufwendig. Das Gleichungssystem wird im allg. in Matrizenschreibweise dargestellt und für die jeweiligen Bahnkurven gelöst. & den Massenträgheitsmomenten J(α), den GeschwindigAus den Winkelbeschleunigungen ω, keiten ω, den zeitlichen Änderungen der Massenträgheitsmomente dJ(α)/dt und den Widerstandsmomenten MW(α) wird für die Achsen die maximale Antriebsleistung der Servoantriebe ermittelt. Bei vielen Robotern wird die notwendige Antriebsleistung im wesentlichen durch die Beschleunigungsmomente bestimmt. G. Schenke, 3.2003 Automatisierte Antriebe FB Technik, Abt. E+I 81