Kreiselpräzession - physics (Johannes Dörr)
Werbung
")
Physikalisches Praktikum
Versuch 4
Kreiselpräzession
1
1.1
Name:
Johannes Dörr
Oliver Schönborn
Gruppe:
Datum:
Assistent:
Matthias Stein
testiert:
3
08.05.2006
Theorie
Rotation, Drehimpuls und Trägheitsmoment
Führt ein Körper eine Translationsbewegung aus, so trägt er einen Impuls p~ mit sich, der sich aus dem Produkt
seiner Masse m und seiner Geschwindigkeit ~v ergibt.
p~ = m · ~v
(1)
Die Bewegung eines rotierenden Körpers lässt sich durch den Drehimpuls L beschreiben, der eine Aussage über
die Drehgeschwindigkeit und -richtung macht. Er ist ein Vektor, der orthogonal auf der Ebene steht, die zu den
Radien der Massepunkte des Körpers parallel ist. Seine Denition lautet:
~ = m~r × ~r˙ .
L
(2)
Diese Formel gilt zum Beispiel für die Ellipsenbahnen von Himmelskörpern, deren Ausdehnung wesentlich kleiner
als der Bahnradius r ist und deshalb vernachlässigt werden kann.
Ist dies nicht der Fall, zum Beispiel, wenn die Drehachse einer Kreisbahn innerhalb des Körpers liegt, dann
ergibt sich der Drehimpuls des gesamten Körpers aus der Summe:
X
~ =
L
mi ri · r˙i .
(3)
i
1
Da es sich um eine Kreisbewegung handelt, ist der Geschwindigkeitsvektor ~r˙i immer orthogonal zum Ortsvektor
~ri , sodass anstatt des Kreuzprodukts das Produkt der Beträge schreiben lässt. Alle Punkte, die sich in dem
Radius, also der Entfernung von der Drehachse, unterscheiden, besitzten unterschiedliche Geschwindigkeiten.
Zweckmäÿiger ist es deshalb, die Winkelgeschwindigkeit ω anzugeben. Weitere Umformung ergibt mit v = ωri :
X
~ =
L
mi ri · ωri
(4)
i
X
= ω
(5)
mi ri2 = ω I .
i
| {z }
T raegheits−
moment
Hier taucht das Trägheitsmoment auf, das prinzipiell der trägen Masse bei Translationsbewegungen entspricht.
Genau wie beim Impuls die Masse wirkt sich also das Trägheitsmoment auf den Drehimpuls aus. Im Gegensatz
zur Masse eines Körpers besitzt dieser mehrere, genauer gesagt beliebig viele Trägheitsmomente, da es ebenso
viele mögliche Drehachsen gibt.
Die Denition des Trägheitsmoments eines homogenen Körpers lässt sich noch auf eine andere Art schreiben,
nämlich als Integral über das Volumen:
X
X
I~ =
mi ri2 · =
ρVi ri2
(6)
i
i
Z
= ρ
(7)
2
r dV .
V
Hiermit ist es nun möglich, die Momente verschiedener Körper zu ermitteln. Für die Berechnung des
eignen sich Zylinderkoordinaten besser als kathesische Koordinaten.
Aus der Höhe h und dem Radius R ergibt sich dann für die Dichte:
Trägheitsmoments eines Vollzylinders
ρ=
.
m
πhR2
Mit dV = rdϕ dr dz gilt dann für sein Trägheitsmoment um seine Symmetrieachse:
Z
I
= ρ
Zh ZR Z2π
2
r dV = ρ
V
0
ZR
=
2πρ · h
0
0
r4
r dr = 2πρh ·
4
3
0
=
(8)
r2 rdϕ dr dz
R
= 2πρh
0
R4
4
1
mR2 .
2
(9)
(10)
Wenn sich der Impuls bei einer Translation ändert, dann muss eine Kraft auf den Körper wirken.
∆~
p = m~v˙ = ma = F .
(11)
Die Änderung des Impules ist also genau die Kraft. Bei der Rotation verhält es sich ähnlich:
~ =
∆L
d
(m~r × ~r˙ ) = m~r˙ × ~r˙ +m~r × ~¨r
| {z }
dt
(12)
= 0
= m~r × ~¨r = ~r × F~ = T .
(13)
T heiÿt Drehmoment. Seine Denition ist sehr anschaulich - eine Schraube lässt sich einfacher festziehen, wenn
man die Kraft mit Hilfe eines möglichst langen Hebelarms ausübt.
2
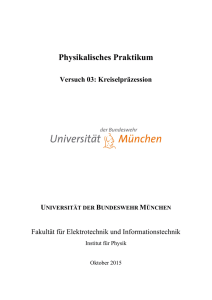
Figure 1: Links: Geschwindigkeit eines Punktes im bewegten Bezugssystem, von einem festen Bezugssystem
betrachtet; Mitte: Wandernde Drehimpulsachse im körperfesten Bezugssystem; Rechts: Feste Drehimpulsachse
im raumfesten Bezugssystem
1.2
Rotierende Bezugssysteme und Eulersche Gleichungen
In eigenem ruhenden Bezugssystem lässt sich sehr einfach die Bewegung eines Punktes beschreiben. Es ist die
Ableitung seines Ortes ~x nach der Zeit, also seine Geschwindigkeit ~x˙ = ~v . Rotiert dieses Bezugssystem gegen
ein anderes mit der Winkelgeschwindigkeit ω
~ rot , so bewegt sich der Punkt von dort aus betrachtet auch dann,
wenn er in dem ersten Bezugssystem ruht, also vrot = 0. Bewegt er sich auch dort, so beobachtet man in dem
festen Bezugssystem ~vf est , eine Überlagerung zweier Bewegungen:
= ~vrot + ω
~ rot × ~r .
~vf est
(14)
Der Term ω
~ rot × ~r ist die Bahngeschwindigkeit des Punktes mit ~r als den Abstandsvektor von der Drehachse
(siehe Fig. 1, links).
Ähnlich verhält es sich mit der Änderung des Drehimpulses. Im raumfesten Bezugssystem (Fig. 1,
rechts) ist die Impulsachse fest, zumindest solange kein Drehmoment von auÿen wirkt. Dreht sich der Körper
um eine Drehachse, die nicht auf dieser Impulsachse liegt, so bewegt sich in seinem, also im körperfesten
Bezugssystem, die Impulschse (Fig. 1, Mitte). Dort ist also eine ständige Änderung des Drehimpulses, also ein
Drehmoment vorhanden, das im raumfesten Bezugssystem jedoch fehlt. Es gilt demnach:
dL
dL
=
+ (ωrot × L)R .
(15)
dt R
dt K
Bei der Umrechnung vom körper- ins raumfeste System wird dieses zusätzliche Drehmoment durch die Addition
von ωrot × L abgezogen, da dieser Vektor genau in die entgegengesetzte Richtung zeigt.
Die Vektorgleichung kann nun auch für die einzelnen Komponenten umformuliert werden. Beispielsweise gilt
für die erste Achse (beispielsweise die x-Achse) mit T1 als Komponente des Drehmoments in ihre Richtung:
T1
=
dL
dt
+ (ω × L)1
(16)
1
d
(I1 ω1 ) + (ω2 L3 − ω3 L2 )
dt
dω1
= I1
+ ω2 I3 ω3 − ω3 I2 ω2
dt
dω1
= I1
+ (I3 − I2 ) · ω3 ω2 .
dt
=
3
(17)
(18)
(19)
Analog dazu folgt für die übrigen Komponenten:
T2
T3
Diese drei Formeln heiÿen
1.3
dω2
+ (I1 − I3 ) · ω1 ω3
dt
dω3
= I3
+ (I2 − I1 ) · ω2 ω1 .
dt
= I2
(20)
(21)
Eulersche Gleichungen.
Symmetrische Kreisel
Physikalisch versteht man unter einem Kreisel einen rotierenden Körper, der an (nur) einem Punkt festgehalten
wird, sodass er drei Freiheitsgrade der Rotation besitzt. Liegt dieser Unterstützungspunkt im Schwerpunkt,
so nennt man den Kreisel kräftefrei oder besser momentfrei. In diesem Fall bleibt der Kreisel im Raum fest
orientiert.
Jeder Körper kann ein Kreisel sein. Bei einem symmetrischen Kreisel existiert eine Symmetrieachse durch den
Schwerpunkt. Im Folgenden werden nur symmetrische Kreisel betrachtet.
Man benennt drei Achsen des Kreisels. Die Figurenachse entspricht der Symmetrieachse des rotierenden Körpers. Die Drehachse zeigt in die Richtung des Vektors der Winkelgeschwindigkeit, die die Rotation des Kreisels
beschreibt. Die Richtung des Drehimpulsvektors wird durch die Impulsachse beschrieben. Bei einem momentfreien Kreisel liegen alle diese Achsen aufeinander.
Ein Gyroskop stellt eine besondere Art des Kreisels dar. Seine Figurenachse ist um 90◦ ausgelenkt und somit
parallel zur Tischäche. Momentfrei wird er durch ein Ausgleichsgewicht, mit einem Zusatzgewicht kann dann
ein Drehmoment bestimmter Gröÿe erzeugt werden, das in den folgenden Betrachtungen eine Rolle spielen wird.
1.4
Kreiselpräzession
Wirkt auf den Kreisel eine konstante Kraft F , so entsteht an dem Drehpunkt ein Drehmoment T = ~r × F~ , das
orthogonal zum Drehimpuls des Kreisels steht und seine Richtung verändert. Auf Grund der Orthogonalität
bleibt sein Betrag jedoch konstant. Der Kreisel geht also in eine Drehbewegung über und weicht somit der
angreifenden Kraft zur Seite aus. Diese Bewegung wird Präzession genannt. Mit einer Näherung für kleine
Winkel ϕ ergibt sich für die zugehörige Winkelgeschwindigkeit ωP :
sin ϕ ≈ ϕ
=
ϕ
dt
=
⇔
dL
L
dL
L · dt
(22)
⇔ ωP =
T
.
L
(23)
Stehen Präzessions- und Figurenachse nicht, so wie beim Gyroskop, senkrecht aufeinader, so gilt allgemein:
ωP
=
T
.
L · sin θ
(24)
Ist I1 das Trägheitsmoment des Kreisels um die Figurenachse und m die Masse, die im Abstand r vom Aufstützpunkt das Drehmoment verursacht, so ergibt sich mit L = I · ω und T = r × F = r · F · sin θ:
ωP
=
r · mg · sin θ
r · mg
=
.
I1 · ωK · sin θ
I1 · ωK
Die Präzessionsgeschwindigkeit ist unabhängig von dem Winkel zwischen Präzessions- und Figurenachse.
4
(25)
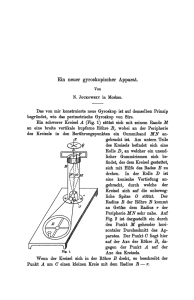
Figure 2: Durch das Drehmoment des Zusatzgewichts ändert sich der Drehimpuls, was zu einer Präzessionsbewegung des Kreisels führt
1.5
Nutation eines Kreisels
Beispielsweise durch einen Schlag auf die Achse eines zunächst momentfreien Kreisels kann man seine Bewegung
stören. Während des Schlags rotiert der Kreisel nicht mehr nur um seine Figurenachse, beim Auslenken kommt
die Bewegung der Figurenachse selbst um den Aufstützpunkt hinzu. Die Addition der beiden Vektoren ω1 und
ω2 der zugehörigen Winkelgeschwindigkeit beschreibt diese Bewegung.
Durch den Schlag bekommt der Kreisel einen zusätzlichen Drehimpuls, der von dem Trägheitsmoment des
Körpers um die Achse durch den Aufstützpunkt abhängt: L2 = I2 · ω2 . Da das Moment um diese Achse
kleiner ist als das Moment L1 um die Figurenachse, ist die Auslenkung der Drehimpulsachse kleiner als die der
Drehachse. Die Achsen liegen also nicht mehr aufeinander, was eine Nutationsbewegung hervorruft.
Diese lässt sich am anschaulichsten mit Kegelmanteln beschreiben. Wir gehen zunächst davon aus, dass der
Kreisel im Schwerpunkt gelagert ist und auch bei einer Auslenkung der Figurenachse momentfrei bleibt. Da
nach dem Schlag dann auf den Kreisel keine weitere Kraft mehr wirkt, muss der Drehimpuls erhalten bleiben,
sein Betrag und seine Richtung im Raum ändern sich also nicht mehr. Die Impulsachse ist somit raumfest und
steht je nach Stärke und Richtung des Schlags schräg.
Die Figurenachse kreist um die Impulsachse und beschreibt dabei den Mantel eines Kegels, man nennt ihn
den Nutationskegel. Der Kreisel selbst dreht sich natürlich immernoch um die Figurenachse. Auf Grund
ihrer Bewegung entsteht eine Überlagerung der Rotationsbewegungen um die momentane Drehachse, die
sich auf dem Rastpolkegel ebenfalls um die Impulsachse dreht. Dabei bleiben alle drei Achsen in einer
Ebene. Der Gangpolkegel dient der Veranschaulichung der Bewegung der Figurenachse, die auch so interpretiert werden kann, dass sich auf diesem, dessen Symmetierachse die Figurenachse ist, der Rastpokegel abrollt.
Die Nutationsfrequenz, also die Kreisgeschwindigkeit der Bewegung der Figuren- um die Impulsachse lässt sich
mit Hilfe der Eulerschen Gleichungen herleiten. Da auf den Kreisel keine äuÿeren Drehmomente wirken, gilt:
T1 = T2 = T3 = 0. Da wir einen symmetrischen Kreisel betrachten, gilt zudem: I2 = I3 . Daraus folgt
unmittelbar:
T1 ≡ 0
= I1
dω1
⇒ I1 ω1 = L1 = const .
dt
5
(26)
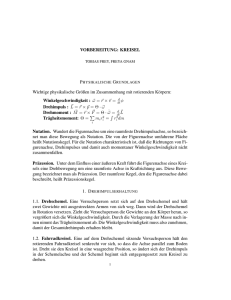
Figure 3: Die verschiedenen Achsen eines Kreisels fallen bei der Nutationsbewegung nicht mehr aufeinander
Der Anteil des Drehimpulses in Richtung der Figurenachse ändert sich also nicht, ebenso ist es mit der Komponente der Drehachse, wie man an dem Gleichungssystem, das man erhält, erkennt:
(27)
0 = ω̇1
0 = ω̇2 + Ωω3
0 = ω̇3 − Ωω2 .
(28)
(29)
Für das es folgende Lösung gibt:
ω1
ω2
ω3
(30)
= C
= A · cos Ωt
= A · sin Ωt
(31)
(32)
2
· ω1 . Die Winkelgeschwindigkeit Ω ist die
mit A, C = const und Ω = I1I−I
2
der Drehachse um die Figurenachse bzw. umgekehrt. Um die Nutationsfrequenz, also die Winkelgeschwindigkeit der Figurenachse um die Impulsachse
zu bekommen, müssen die Kreisumfänge von Rast- und Körperkegel, die
aufeinader abrollen, verglichen werden. Der Körperkegel ist wie der Gangpolkegel zur Figurenachse symmetrisch, allerdings rollt
q er auÿen auf dem
L
Rastpolkegel ab. Die Kreisumpfänge ergeben sich aus ω 2 − ( |L|
· ω)2 und
p
ω 2 − ω12 .
Daraus ergibt sich dann:
ωN
=
L
I1
=
·ω .
I2
I2
(33)
Speziell für ein Gyroskop lässt sich die Nutationsfrequenz alternativ quantizieren, indem man man die Ebene,
die die beiden Achsen aufspannen, mit einer dritten Achse f⊥ versieht, die zur Figurenachse senkrecht ist.
6
I⊥ ist das Trägheitsmoment des Kreisels um diese Achse, I1 wie oben dasjenige um die Figurenachse. Dann
lassen sich folgende Aussagen für den Winkel θ zwischen Impuls- und Figurenachse machen: ωN ⊥ = ωN · sin θ;
L⊥ = I⊥ · ωN ⊥ und Lk = I1 · ω . Daraus ergibt sich dann:
ωN =
Lk
L⊥
L
I1
ωN ⊥
=
=
=
·ω .
=
sin θ
I⊥ · sin θ
I⊥
I⊥ · cos θ
I⊥ · cos θ
(34)
Das Trägheitsmoment I⊥ ist nicht immer bekannt. Bei einem Gyroskop hingegen schon. Denn dort entspricht
f⊥ genau der einen Hauptträgheitsachse. Für kleine Winkel θ lässt sich nähern: cos θ ≈ 1. Damit ergibt sich
für die Nutationsgeschwindigkeit ωN schlieÿlich:
ωN =
I1
·ω .
I2
(35)
Sie ist also abhängig von der Drehgeschwindigkeit ω des Kreisels sowie seinen Hauptträgheitsmomenten I1 und
I2 = I3 , von denen es bei einem symmetrischen Kreisel ja nur zwei verschiedene gibt.
Ist der Kreisel nicht im Schwerpunkt gelagert, so geht er nach dem Stoÿ zusätzlich in eine Präzessionsbewegung über. Denn durch die Auslenkung der Figurenachse wirkt nun wegen der Schwerkraft ein
Drehmoment auf den Kreisel, das die oben beschriebene Bewegung der Drehimpulsachse verursacht. Die
Bewegung von Präzession und Nutation können also durchaus auch gleichzeitig auftreten und sich überlagern.
1.6
Coriolis-Kraft
Die Coriolis-Kraft ist eine Scheinkraft, die in rotierenden Bezugssystemen auftritt. Bewegt sich beispielsweise
ein Massepunkt mit vr auf einer mit ω rotierenden Scheibe vom Mittelpunkt nach auÿen, so nimmt der Radius
r der Kreisbahn, auf der er sich, von einem festen Bezugssystem aus betrachtet, bewegt, stetig zu.
Figure 4:
Links:
Raumfestes Bezugssystem;
Rechts:
Rotierendes (körperfestes) Bezugssystem
Seine Bahngeschwindigkeit vω müsste also ebenfalls zunehmen, um auf der Scheibe eine geradlinige Strecke
zurückzulegen. Da auf ihn jedoch keine Kraft wirkt, die dies verursachen könnte, und er sich deshalb gleichförmig
7
bewegt, bleibt seine Bahngeschwindigkeit konstant, weshalb es im rotierenden Bezugssystem scheint, dass er
um s abgelenkt werden würde.
s
(vω =)
= r · ω = vr t · ω
(36)
t
2
⇔ s = vr · ω · t
(37)
Vergleicht man dies mit s = 12 at2 , so muss gelten:
s = v|{z}
· ω ·t2
(38)
1
2a
⇒ aC
=
2·v·ω .
(39)
aC ist die Coriolis-Beschleunigung. Die Coriolis-Kraft ist dem entsprechend FC = m · aC . Ist der Vektor der
Geschwindigkeit ~v nicht zum Vektor der Kreisfrequenz ω
~ orthogonal, so ergibt sich allgemein mit θ als dem
eingeschlossenen Winkel:
aC
=
2 · v · ω · sin θ = 2~v × ω
~ .
(40)
In der Natur hat die Coriolis-Kraft beispielsweise in der Atmosphäre groÿe Auswirkung auf die Bewegung der
Luftmassen.
Figure 5: Coriolis-Kraft bei der Kreiselpräzession
Die Coriolis-Kraft spielt auch bei der Kreiselpräzession eine Rolle. Sie ist es, die der Kraft, die die Präzessionsbewegung verursacht, entgegenwirkt und verhindert, dass sie den Kreisel umkippen lässt. In dem Bezugssystem,
das sich mit der Präzession mitdreht, wirken auf die Masseteilchen, deren Geschwindigkeitsvektor nicht parallel
zum Drehvektor wP ist, Coriolis-Kräfte, welche versuchen, den Kreisel zu kippen. Das von ihnen erzeugte
Drehmoment T 0 ist aber gerade stark genug, um ein Kippen in die andere Richtung zu verhindern.
1.7
Physikalisches Pendel
Als mathematisches Pendel bezeichnet man die Idealisierung eines Pendels, bei der ein Massepunkt der Masse
m an einem masselosen Faden der Länge l aufgehängt ist. Seine Bewegung lässt sich mit der folgenden Dier8
entialgleichung beschreiben (ϕ sei der Winkel, den der Faden mit dem Lot bildet):
m · l · ϕ̈
= −m · g · sin ϕ
g
≈ − ·ϕ .
l
ϕ̈
(41)
(42)
Die Näherung sin ϕ ≈ ϕ gilt für kleine Auslenkungen. Für die so vereinfachte Bewegungsgleichung erhält man
zwei Lösungen, von der hier nur die eine angegeben wird:
r
g
ϕ(t) = ϕmax · sin
·t .
(43)
l
(Die zweite Lösung ist identisch, nur das anstatt der Sinus- die Cosinus-Funktion verwendet wird.) Aus der
Gleichung lässt sich die Winkelgeschwindigkeit der Schwingung und damit die Periodendauer TP ablesen:
s
l
2π
= 2π
.
(44)
TP =
ω
g
Beim physikalischen Pendel handelt es sich hingegen um eine Vielzahl von Massepunkten, die auÿerhalb des
gemeinsamen Schwerpunktes aufgehängt sind.
Hat dieser Aufgängepunkt vom Schwerpunkt eine Entfernung von s, so wirkt an ihm ein Drehmoment T :
T (ϕ)
= −s × F = −mgs · sin ϕ
≈ −mgs · ϕ .
(45)
(46)
Das negative Vorzeichen soll verdeutlichen, dass das Drehmoment der Auslenkung entgegenwirkt.
Mit T = Iω = I ϕ̈ ergibt sich die folgende Bewegungsgleichung:
I ϕ̈
ϕ̈
= −mgs · ϕ
mgs
·ϕ .
= −
I
(47)
(48)
Vergleicht man dies mit der Gleichung für das mathematische Pendel, erkennt man, dass sich das physikalische
I
als mathematisches Pendel mit der Fadenlänge l = ms
ansehen lässt. Für die Periodendauer TP ergibt sich
dann:
s
I
TP = 2π
.
(49)
mgs
Von der Periodendauer eines schwingenden Pendels lässt sich umgekehrt auf sein Trägheitsmoment I um die
Achse durch den Aufhängepunkt schlieÿen:
I
=
mgs · TP2
.
4π 2
(50)
Wird die Pendelbewegung erst durch ein Zusatzgewicht mZ möglich, da die Drehachse des Körpers im Normalfall
durch den Schwerpunkt geht (siehe Durchführung), so muss das Trägheitsmoment IZ subtrahiert werden, um
das eigentliche Moment IK des Körpers zu errechnen. Das Zusatzgewicht wird hier als Punktmasse im Abstand
a von der Drehachse entfernt angesehen.
IK
= I − IZ =
mgs · TP2
− mZ · a2 .
4π 2
9
(51)
2
Durchführung
Bei eingespanntem Kreisel wird der Versuchsaufbau mit Hilfe eines Zusatzgewichtes, das ins Gewindeloch
eingeschraubt, als Physikalisches Pendel ausgebildet. Das Rad wird ausgelenkt und die Schwingungsdauer über
10 Schwingungsperioden gemessen und notiert. Die Messung wird auch an der diametral gegenüberliegenden
Seite vorgenommen, auch die Masse des Zusatzgewichts wird für die Bestimmung des Trägheitsmoments im
Messprotokoll festgehalten.
Der Kreisel wird von der Einspannung befreit und mit Hilfe des Ausgleichgewichts in horizontaler Lage
justiert. Die nötigen Gröÿen werden gemessen und notiert (Abstand des Ausgleichgewichts vom Unterstützungspunkt, Masse des Ausgleichgewichts und Abstand der Kerbe fürs Zusatzgewicht von der Drehachse).
Das Rad wird mit einem überstehenden Papierstreifen bestückt, damit die Lichtschranke die Rotationsperiode
des Rades bzw. Kreisels messen kann.
Mit Hilfe der Aufzugsschnur wird nun der Kreisel in schnelle Rotation versetzt und die Rotationsperiode TR (Winkelgeschwindigkeit ω ) wird mit der Lichtschranke gemessen und im Protokoll notiert. Eins der
bereit liegenden Zusatzgewichte wird an die freie Achse angehängt. Das Rad führt eine Präzession aus, deren
Frequenz ωP sofort zu messen ist, indem die Zeit eines halben Umlaufs gestoppt wird (Drehung von 180◦ ).
Nach einem halben Umlauf wird das Gewicht abgehängt und die Rotationsperiode TR des Kreisels erneut mit
der Lichtschranke gemessen (Das Rad sollte einen Teil seiner Geschwindigkeit eingebüÿt haben). Das Gewicht
wird wieder angehängt und nochmals die Zeit für einen halben Umlauf gemessen. Dieses Verfahren wird
viermal wiederholt, anschlieÿend wird der Versuch auch für die anderen Gewichte durchgeführt.
Als Nächstes widmet man seine Aufmerksamkeit der Nutation. Hierzu wird wieder der Kreisel in Rotation versetzt und seine Rotationsperiode mit der Lichtschranke gemessen. Nun gibt man der Achse einen
Stoss und misst die Notationsperiode TN für so viele Schwingungen wie möglich. Ist die Nutationsbewegung
ausgeklungen, misst man wieder die Rotationsperiode, dann versetzt man der Achse wieder einen Stoss, hiermit
erzählt man die Nutationsperiode in Abhängikeit der Rotationsfrequenz des Rades. Insgesamt wird dies 3 mal
wiederholt.
3
3.1
Auswertung
Theoretische Trägheitsmomente des Kreisels (1.)
Für das Trägheitsmoment I1 des Kreisels um die horizontale Achse gilt:
I1 = 21 mR2 .
Es fällt nur das Rad in Betracht, da nur dieses rotiert, während alle anderen Teile des Kreisels wie Zusatzgewichte
und Achse sich nicht mitbewegen. Die Masse des Rades m = 1, 324kg war angegeben und ieÿt deshalb nicht
in die Fehlerrechnung ein. Für den Radius des Rades ergab die Messungen: R = 0, 1225(5)m. Für den Fehler
des Ergebnisses gilt:
σI1 = mR · σR .
Damit ergibt sich:
I1 = 9, 934(81) · 10−3 kg m2
Für das Trägheitsmoment IR,
2
des Rades um die vertikale Achse gilt:
IR,
2
= 14 mR2 +
10
1
2
12 md
.
Die Messung der Breite des Rades ergab: d = 0, 0280(5)m. Für den Fehler des Ergebnisses gilt:
σIR,
Damit ergibt sich:
IR,
2
2
=
q
1
2 mR
· σR
2
1
6 md
2 +
· σR
· σd
2
· σd2 .
= 5, 05(4) · 10−3 kg m2
Das Trägheitsmoment I2 des Kreisels um die vertikale Achse ergibt sich aus den Momenten dreier Bestandteile
des Kreisels, nämlich dem Rad, dem Ausgleichsgewicht und der Achse. Da wir das Gewicht letzterer nicht
bestimmen konnten, muss es im Folgenden vernachlässigt werden.
Das Moment des Rades um die vertikale Drehachse lässt sich mit Hilfe des Steinerschen Satzes ermitteln (Herleitung siehe Protokoll "Versuch 3, Trägheitsmoment"), da die Achse parallel zur der ist, die bei der
vorigen Berechnung betrachtet wurde. Es ergibt sich mit dem Abstand rR = 0, 1350(6)m des Rades von der
vertikalen Drehachse für das Trägheitsmoment JR :
JR = 14 mR2 +
1
2
12 md
2
+ m · rR
und für den Fehler:
σ JR =
q
1
2 mR
· σR
2
2 +
· σR
1
6 md
· σd
2
· σd2 + (2mrR )2 · σr2R .
Das Ausgleichsgewicht kann wegen seiner geringen Ausdehnung im Vergleich zu seinem Abstand rA von der
vertikalen Drehachse als Punktmasse betrachtet werden. Damit ergibt sich mit der Masse des Ausgleichsgewichts
mA = 0, 938kg und seinem Abstand zur Drehachse rA = 0, 1623(3)m für das Drehmoment JA :
2
JA = mA rA
, und für den Fehler: σJA = 2mA rA · σrA .
Für das Trägheitsmoment I2 des gesamten Kreisel gilt dann:
I2 = JR + JA mit dem Fehler σI2 =
Damit ergibt sich:
3.2
q
σJ2R + σJ2A .
I2 = 53, 89(24) · 10−3 kg m2
Trägheitsmoment des Kreisels mit Hilfe der Schwingungsdauer (2.)
Das Trägheitsmoment des Kreisels um die horizontale Achse ergibt sich aus:
mgs·TP2
− mZ · a2 .
4π 2
(m: Masse des Rades, mZ : Masse des Zusatzgewichts, a: Abstand des Zusatzgewichts von der Drehachse,
I1 =
s:
Abstand der Drehachse zum Schwerpunkt,
TP :
Periodendauer)
Der Schwerpunkt teilt die Strecke zwischen Schwerpunkt des Rades (=Drehachse) und Zusatzmasse genau im
inversen Verhältnis der Gewichte:
a−s
s
=
m
mZ
⇔ r = ( mmZ + 1) · s ⇔ s =
Dies eingesetzt in die obige Formel ergibt:
11
mZ
mZ +m
·a=
mZ
m
·a .
I1 =
gmz a·TP2
4π 2
− mZ · a2 .
Die Masse des Zusatzgewichts mZ = 0, 120kg war angegeben, die Messung ihres Abstands zur Drehachse
ergab: a = 0, 1242(5)m. Der Mittelwert der Schwingungsdauern liefert: TP = 1, 780(7)s. Für den Fehler des
Ergebnisses gilt:
σ I1 =
Damit ergibt sich:
r
gamZ ·TP
2π 2
2
· (σTP )2 +
gmZ ·TP2
4π 2
2
− 2mZ a · (σa )2 .
I1 = 9, 88(10) · 10−3 kg m2
Dieses Ergebnis weicht von der theoretischen Berechnung um 0,54% ab, ein zufriedenstellendes Ergebnis.
3.3
Trägheitsmoment des Kreisels mit Hilfe der Präzessionsfrequenz (3. und 4.)
Für die Präzessionsfrequenz ωP eines Kreisels mit der Rotationsfrequenz ωK , dem Trägheitsmoment I1 um die
Drehachse und einer Zusatzmasse m im Abstand r vom Aufstützpunkt entfernt gilt:
ωP =
r·mg
I1 ·ωK
.
Sind die Winkelgeschwindigkeiten durch Messung bekannt, so lässt sich damit auf das Trägheitsmoment des
Kreisels rückschlieÿen:
I1 =
r·mg
ωP ·ωK
.
Die folgende Tabelle zeigt die Ergebnisse für die Winkelgeschwindigkeiten abhängig von verschiedenen Massen.
Wie in der Durchführung beschrieben wurde immer nach einer halben Präzessionsperiode die Rotationsgeschwindigkeit des Kreisels gemessen. Bei der Auswertung wurde dann jede Präzessionsperiodendauer dem
Mittelwert der davor und danach gemessenen Rotationsperiode zugeordnet, was hier in der Tabelle dargestellt
ist.
Die Fehlerangabe bezieht sich auf die Genauigkeit der Bestimmung der Umlaufzeit bei der Präzession. Dabei
gehen wir von einer Ungenauigkeit von ±1s aus. Die Messung der Periodendauer ωK der Rotation des Kreisels,
für die eine Lichtschranke verwendet wurde, geht nicht in die Fehlerrechnung ein, da eine dermaÿen genaue
Abschätzung wenig Sinn macht, wenn die Vollendung einer Präzessionsperiode per Augenmaÿ ermittelt werden
muss, was einen wesentlich gröÿeren Fehler verursacht.
12
Figure 6: Präzessions- und Rotationsfrequenz, Gewicht: 60g
Masse m Rotationsfrequenz ω
K
Präzessionsfrequenz ω
60g
68,669
50,065
31,574
24,737
18,982
15,988
13,824
s−1
s−1
s−1
s−1
s−1
s−1
s−1
0,185(6) s−1
0,224(8) s−1
0,280(12) s−1
0,343(19) s−1
0,526(44) s−1
0,537(46) s−1
0,628(63) s−1
80g
38,905
31,495
26,966
23,665
20,737
18,399
s−1
s−1
s−1
s−1
s−1
s−1
0,278(12)
0,336(18)
0,433(30)
0,459(33)
0,535(46)
0,609(59)
s−1
s−1
s−1
s−1
s−1
s−1
90g
45,366
37,069
29,638
24,306
11,855
11,033
16,194
s−1
s−1
s−1
s−1
s−1
s−1
s−1
0,292(14)
0,358(20)
0,391(24)
0,497(39)
0,571(52)
0,645(66)
0,689(76)
s−1
s−1
s−1
s−1
s−1
s−1
s−1
P
Da für die Ermittlung des Trägheitsmoments nur das Produkt der beiden Kreisfrequenzen benötigt
wird, lässt sich lineare Regression anwenden. Dazu wird die Präzessionsfrequenz gegen den Kehrwert der
Rotationsfrequenz aufgetragen. Die Steigung der Geraden entspricht dann dem gesuchten Produkt.
Für den Fehler des Ergebnisses ergibt sich mit β = ωK · ωP :
σ I1 =
r
r·mg
β2
2
· σβ2 +
13
mg
β
2
· σr2 .
Figure 7: Präzessions- und Rotationsfrequenz, Gewicht: 80g
Figure 8: Präzessions- und Rotationsfrequenz, Gewicht: 90g
14
Figure 9: Nutationsfrequenz in Abhängigkeit von der Kreiselfrequenz
Die Gröÿen der Zusatzmassen waren angegeben und werden deshalb nicht als fehlerbehaftet angesehen. Für die
Entfernung r der Zusatzmasse vom Aufstützpunkt ermittelten wir r = 0, 2717(3)m. Mit den Werten β und σβ
aus der Regression (siehe Fig. 6 bis 8) ergeben sich die folgenden Werte für das Trägheitsmoment:
I1,
I1,
I1,
60g
80g
90g
= 1, 557(296) · 10−2 kg m2
= 1, 953(547) · 10−2 kg m2
= 2, 280(638) · 10−2 kg m2
Der gewichtete Mittelwert ergibt I1 = 1, 74(5) · 10−2 . Zum berechneten Wert ergibt sich eine Abweichung um
86, 3%. Es ist schwer, abzuschätzen, woher dieser sehr groÿe Fehler kommen kann. Einige möglichen Ursachen
werden wir in der Diskussion weiter unten behandeln.
3.4
Abhängigkeit der Nutation von der Rotationsfrequenz des Kreisels (5.)
Aus den Eulerschen Gleichungen lässt sich herleiten, dass zwischen der Nutations- und der Rotationsfrequenz
ωN bzw. ωK des Kreisels ein linearer Zusammenhang besteht. Der Proportionalitätsfaktor κ ergibt sich aus
den Trägheitsmomenten:
ωN = κ · ωK =
I1
I2
· ωK .
Dabei ist I1 das Trägheitsmoment um die horizontale, I2 das um die vertikale Drehachse. Der Fehler ergibt sich
aus:
σκ =
r 2
1
I2
· σI21 +
I1
I22
2
· σI22 .
Aus den weiter oben berechneten Werten für I1 , σI1 , I2 und σI2 ergibt sich damit:
κ = 0, 180(2) kg m2
15
Für die experimentelle Bestimmung von κ wurde für verschiedenen Kreiselfrequenzen die Nutationsfrequenz
nach einem Schlag auf die Achse gemessen. Als einer Nutationsfrequenz zugehörige Kreiselfrequenz wird hier
der Mittelwert der Kreiselfrequenzen vor und nach dem Schlag gebildet, ähnlich wie bei der Auswertung der
Präzession. Bei der Nutationsperiode gehen wir von einem Fehler von ±0, 5s aus.
Masse m Rotationsfrequenz ω
60g
46,031 s−1
43,934 s−1
20,668 s−1
10,267 s−1
9,795 s−1
K
Nutationsfrequenz ω
N
0,13200(13200) ·10−2 s−1
0,08289(5468) ·10−2 s−1
0,05200(2153) ·10−2 s−1
0,03161(195) ·10−2 s−1
0,01022(83) ·10−2 s−1
Die Auswertung mittels linearer Regression ergab:
κ = 0, 240(26) kg m2
Mit einer Abweichung 33, 3% konnten wir somit den linearen Zusammenhang zwischen Nutations- und
Rotationsfrequenz bestätigen.
4
Diskussion
Bei der Betrachtung der errechneten Ergebnisse fällt sehr schnell auf, dass sie durch die Messwerte signikanten
Fehlern unterworfen sind. Da die benötigten Apparaturen wie Stoppuhr und Lichtschranke durchaus präzise
Arbeitsgeräte sind, muss der Fehler bei den Praktikanten gesucht werden.
Es ist zu sehen, dass vor allem bei der Messung der Präzession stark abweichende Werte und daraus groÿe
Fehler der Ergebnisse resultieren. Sie können an der folgenden Stelle aufgetreten sein: Bei der Messung einer
halben Präzessionsperiode arbeiteten wir beide gleichzeitig, einer von uns wartete auf die Vollendung der
halben Umdrehung und nahm das Gewicht ab, der andere maÿ die Zeit. Das bedeutet, dass der statistische
Fehler hier gleich verdoppelt auftritt. Schon die halbe Rotation ist einem Fehler unterworfen, da es keine
Vorrichtung gab, mit der die Vollendung eines halben Umlaufs erkannt werden konnte, und somit geschätzt
werden musste.
Da die Messung jedoch stetig weiterläuft, zieht man diesen Fehler immer weiter mit und schon der Beginn einer neuen Umdrehung ist von den Fehlern aller voriger Umdrehungen verfälscht. Da hier nun noch
ein zweiter Teilnehmer eine Messung vornimmt, wird sogar die fehlerbehaftete Messung mit einem neuen
Fehler gemessen, der auf der Reaktionszeit desjenigen beruht, der die Stoppuhr bedient. Die Messung der
Nutationsperiode ist um einiges genauer - hier fällt einer der statistischen Fehlerquellen weitestgehend weg
und ein bereits vorhandener Fehler in einer der Nutationsperioden wird nicht in die Messung einer zweiten
weitergetragen. Zusammenfassend ist zu erkennen, dass wir der Präzision, die dieser Versuch verlangt, nicht
gerecht werden konnten.
16