Versuch03-Version2015 - Universität der Bundeswehr München
Werbung

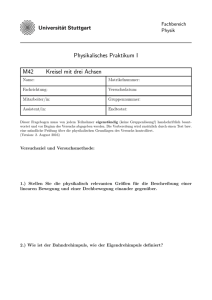
Physikalisches Praktikum Versuch 03: Kreiselpräzession UNIVERSITÄT DER BUNDESWEHR MÜNCHEN Fakultät für Elektrotechnik und Informationstechnik Institut für Physik Oktober 2015 2 Versuch 03 Kreiselpräzession Bei diesem Versuch sollen allgemein die Grundbegriffe der rotierenden Bewegung erarbeitet werden. Diese spezielle Bewegungsform kommt in der Natur sehr häufig vor. So wie makroskopische Körper (Pulsare, Sonne, Erde) Rotationen durchführen, zeigen auch die meisten Elementarteilchen eine rotierende „Spinbewegung“. Rotationsbewegungen haben auch eine große technische Bedeutung bei Maschinen aller Art, bei Fahrzeugen und in Navigationsinstrumenten (Kreiselkompass). Speziell soll bei diesem Versuch das Verhalten eines symmetrischen Kreisels unter Einfluss eines Drehmomentes untersucht werden. Abbildung 1: Versuchsanordnung zur Kreiselpräzession 1. Lernziele dieses Versuchs Die Studierenden sollen… 1.1. … sich an die Vorlesungsinhalte zum Thema Drehbewegungen erinnern 1.2. … Größen zur Beschreibung einer Drehbewegung kennen 1.3. … Trägheitsmomente einfacher Geometrien errechnen können 1.4. … die Präzession eines schweren Kreisels erklären können 1.5. … den im Folgenden beschriebenen Versuch selbstständig durchführen können 1.6. … Messunsicherheiten sinnvoll abschätzen und bewerten können 2. Voraussetzungen Vorlesungsstoff zu den Themen: Grundgesetze der klassischen Mechanik, Drehbewegungen, Drehimpuls, Drehimpulserhaltung, Trägheitsmoment, Drehmoment, Umgang mit vektoriellen Größen 3 Selbststudium zu den Themen: Fehlerrechnung (Gauß‘sche Fehlerfortpflanzung), Methode der kleinsten Quadrate für Ausgleichsgerade, Lorentzkraft 3. Literatur - Hering, Martin, Stohrer, Physik für Ingenieure, 11. Auflage, Kapitel 2, Kapitel 4.4 (als .pdf-Datei über die Uni-Bibliothek downloadbar) 4. - Mitschrift zur Vorlesung Physik 1 - Anleitung zu Versuch1: Fehlerrechnung - Anhang zur Praktikumsanleitung Versuchsbeschreibung In diesem Versuch wird der Einfluss des durch ein Gewicht verursachten Drehmoments auf die Drehbewegung einer rotierenden Scheibe (Kreisel) untersucht. Durch die Bestimmung des Drehmoments und der Winkelgeschwindigkeit der verursachten Präzessionsbewegung kann auf den Drehimpuls der Kreisscheibe geschlossen werden. Vorbereitungsfragen 5.1. Erklären Sie kurz die nachfolgenden Begriffe: Drehzahl, Winkelgeschwindigkeit, Drehmoment und Trägheitsmoment 5.2. Berechnen Sie die Trägheitsmomente der folgenden Körper entsprechend der eingezeichneten Drehachsen. Welchen Zusammenhang gibt es zwischen den Trägheitsmomenten der Körper a und c? a) infinitesimal dünner Zylinder c) Vollzylinder b) infinitesimal dünner Quader R a 5. R b h 5.3. In der vorigen Aufgabe haben Sie das Trägheitsmoment eines infinitesimal dünnen Quaders berechnet, der um eine Drehachse duch seinen Massenmittelpunkt rotiert. Berechnen Sie nun das Trägheitsmoment dieses Körpers bezogen auf eine im Vergleich zur vorigen Aufgabe parallele Drehachse (siehe Skizze) a 4 v b 5.4. Erklären Sie unter Verwendung der Vektorrechnung, wie es zur Präzessionsbewegung des Kreisels unter dem Einfluss eines Drehmoments kommt. 5.5. Wie kann mit Hilfe eines Stroboskops die Drehzahl eines Kreisels bestimmt werden? 5.6. Nennen Sie drei technische Anwendungen des Kreiselprinzips. 6. Versuchsdurchführung Der Kreisel wird von einem Außenläufersynchronmotor (mit einem Polpaar) angetrieben (sinusförmige Wechselspannung (15V/50Hz). Die endgültige Drehzahl wird erst nach etwa zwei bis drei Minuten erreicht. Beim „Hochlaufen“ ist die Kreiselachse festzuhalten, um Vibrationen und ein Aufschaukeln des Systems zu vermeiden. In der folgenden Skizze ist der Versuchsaufbau schematisch dargestellt. 5 6.1. Messen Sie mit dem Stroboskop die Drehzahl des Kreisels und berechnen sie daraus die Winkelgeschwindigkeit ωR mit Messunsicherheit. Welche Winkelgeschwindigkeit ωtheoret müsste theoretisch erreicht werden. 6.2. Schätzen Sie den Einfluss der Kontermutter auf das Gesamtdrehmoment ab. Stellen Sie dazu den Einfluss der Kontermutter in Abhängigkeit der Enfernung vom Drehpunkt dar. Bilden Sie hierzu das Verhältnis des Gesamtdrehmoments und des Drehmoments ausgeübt durch die Kontermutter. Argumentieren Sie, ob der Einfluss zu vernachlässigen ist. 6.3. Platzieren Sie das Gewicht auf der Gewindestange und bestimmen sie die Winkelgeschwindigkeit der Präzessionsbewegung und das vom Gewicht ausgeübte Drehmoment für 4 verschiedene Abstände des Gewichts vom Zentrum der Drehscheibe. Stellen Sie alle gemessenen Größen in einer Tabelle dar und führen Sie eine Fehlerabschätzung nach Gauß durch. Tabelle 1: Beispieltabelle ag Δag M ΔM ωp Δ ωp LR ΔLR Σ 6.4. Dieser Aufgabenteil ist erst nach Erfüllung der Punkte 7.1 bis 7.3 zu bearbeiten. Der Kreisel wird nun wieder so ausbalanciert dass kein Drehmoment auf ihn wirkt. Entfernen Sie das Gewicht und die Kontermutter. Bei Stromdurchgang durch die angebrachten Spulenkörper wird ein Magnetfeld erzeugt. Im Kreiselkörper sind Kobalt-Samarium-Magnete (Permanentmagnete) eingebaut. Die beiden Magnetfelder treten in Wechselwirkung, und auf den Kreisel wird ein Drehmoment ausgeübt. Überzeugen Sie sich, dass die Richtung der Präzessionsbewegung von der Richtung des angelegten Magnetfeldes abhängt. Bestimmen Sie nun Spulenstromes IS. p als Funktion des 6 7. Auswertung 7.1. Bestimmen Sie den Drehimpuls der Einzelmessungen LR sowie seine Unsicherheit ΔLR. Bilden Sie den Mittelwert der Einzeldrehimpulse <LR>. (Geben Sie hierzu die Formel für ΔLR an.) 7.2. Bestimmen Sie den Mittelwert des Drehimpulses <LLA> durch eine lineare Anpassung der Datenpunkte mit der Methode der kleinsten Quadrate. Vergleichen Sie <LR> und <LLA>. Stellen Sie hier die aufgenommenen Datenpunkte sowie die Ausgleichsgerade graphisch dar. (Stellen Sie hier die verwendeten Gleichungen dar.) 7.3. Bestimmen Sie nun aus den Ihnen bekannten Größen das Trägheitsmoment der Kreiselscheibe mit Unsicherheiten. 7.4. Plotten Sie die in 6.4 aufgenommene Daten. Berechenen Sie die Ausgleichsgerade (Summe der kleinsten Quadrate). Erklären Sie, warum bei diesem Versuch p k IS ist (mit k = konstant). 8. Anhang Grundlagen zur rotierenden Bewegung Allgemein gilt für den Drehimpuls L eines Massenpunktes m die Beziehung Lrp mit p m v (Impuls). Greift die Kraft F an einem Körper an, so wirkt ein Drehmoment M r F bezogen auf den Ursprung. Die zeitliche Ableitung von L r p ergibt: dL dr dp dr p r ; p 0, da v p dt dt dt dt 7 mit dp F dt erhalten wir die Grundgleichung der rotierenden Bewegung dL M dt Wenn keine externen Kräfte wirken ( Fi ,ext 0 ) ist M 0 . Die Lösung der obigen Differentialgleichung ergibt dann L =konstant. Der Gesamtdrehimpulsvektor eines beliebig abgeschlossenen Systems ist somit nach Betrag und Richtung zeitlich konstant. Einige Beispiele, bei denen Drehimpulserhaltung auftreten kann, sind: Drehstuhl, Eiskunstläuferin, Diskuswerfen, American Football, rotierendes Geschoss. Im Idealfall stehen bei einem Körper, der um seine Symmetrieachse f rotiert, L und (Winkelgeschwindigkeit) parallel zueinander (auch parallel zu f ). Für einen beliebigen Massenpunkt m im Abstand r von der Rotationsachse gilt: p m v ; mit v r ist somit L m r r . Nach Ausführung des doppelten Vektorproduktes erhält man L m r 2 ; mr2 ist ein Skalar und wird als Trägheitsmoment I bezeichnet. Um das gesamte Trägheitsmoment eines symmetrischen Körpers zu beschreiben (Rotation um die Hauptträgheitsachse), muss über alle Masseelemente mi und Geschwindigkeitskomponenten vi summiert werden. Analog zu oben erhält man: L mi ri2 . i Für Körper mit einer kontinuierlichen Massenverteilung geht man von der Summation zur Integration über und erhält für das Trägheitsmoment I r 2 dm (Trägheitsmomente einfacher symmetrischer Körper, siehe Vorbereitungsfragen). Wird bei einem symmetrischen Kreisel die Parallelität von f und gestört (z. B. durch einen Kraftstoß auf die Figurenachse), dann gilt auch die Parallelität von L und nicht mehr. In diesem Fall laufen f und mit einem endlichen Winkel um die raumfeste Drehimpulsachse L . Diese Rotation der Figurenachse auf einem Kegelmantel heißt Nutation. Anmerkung: Der Kreisel im Praktikum zeigt auf Grund seiner Trägheit und Reibung keine Nutation! 8 Wie in dem vorliegenden Versuch beobachtet wird, kippt die Kreiselachse des rotierenden Kreisels nicht nach unten, wenn man ein Drehmoment M auf den Kreisel ausübt, sondern weicht senkrecht zur angreifenden Kraft aus und beschreibt eine sog. „Präzessionsbewegung“ mit der Winkelgeschwindigkeit p . Der Betrag von L (abhängig von I und p ) ist konstant. L ändert jedoch die Richtung als Funktion der Zeit, d. h. der Drehimpuls ist nicht mehr erhalten. Überlegen Sie, warum L auf dL dt und somit auf M senkrecht steht (siehe Vorbereitungsfragen). Aus dem Drehimpulsdiagramm erhält man: dL d L Somit ist d dL 1 d M ; ist die Winkelges chwindigke it p der Präzession , also gilt p dt dt L dt L Methode der kleinsten Quadrate Die Methode der kleinsten Quadrate wird verwendet um eine Ausgleichsrechnung durchzuführen. Bei der Methode wird im Allgemeinen zu Tupeln (xi, yi) eine Kurve gesucht, die möglichst nahe an den Datenpunkten verläuft. Dazu wird die Summe der quadratischen Abweichungen der angelegten Kurvenpunkte von den experimentell bestimmten Datenpunkten minimiert. Gegeben seien n Wertetupel (x1, y1)… (xn, yn) die mit einer linearen Funktion der Form angepasst werden sollen. Zu jedem Tupel (xi, yi) wird ein Anpassungsfehler ρi bestimmt. ρ Die Parameter a und b werden nun so gewählt, dass die quadratische Summe der Anpassungsfehler (Summe der Fehlerquadrate) minimal wird. Dazu wird die Funktion ρ partiell nach den Parametern a und b abgeleitet und gleich Null gesetzt. ρ 2 ≡0 9 ρ 2 ≡0 Equivalent kann man auch schreiben: ∑ ∑ Die Lösung der oberen Gleichung führt zur eindeutigen Bestimmung der Parameter a und b. Setzt man diese Parameter in die anfängliche lineare Gleichug f(x) ein, erhält man die Ausgleichsgerade.