2 Die verschiedenen Anwendungsgebiete der FEM
Werbung

2 Die verschiedenen Anwendungsgebiete der FEM
In der Technik wird die Physik allgemein in 5 Bereiche unterteilt, in die Mechanik, die Schwingungslehre, die Wärmelehre, die Elektrizitätslehre und die Optik.
In allen diesen Bereichen wird heute die FEM eingesetzt, wobei dies nur in der
Optik seltener vorkommt und daher in diesem Buch nicht behandelt wird. In der
FEM ergibt sich aufgrund der Programmfunktionen eine etwas andere Unterteilung. Grundsätzlich unterscheiden wir zwischen linearen und nichtlinearen sowie
stationären und instationären Problemen, die wie die nichtlinearen Probleme als
schrittweise lineares Problem gelöst werden.
Die Mechanik als Lehre der Kräfte und Bewegungen gasförmiger, flüssiger
und fester Körper findet sich in der linearen und nichtlinearen Statik wieder.
Die Schwingungslehre als Lehre der zeitabhängigen, wellenförmigen Bewegung der gleichen Körper als träge Massen und dem Sonderfall des Schalls findet
sich in der linearen und nichtlinearen Dynamik und der Akustik wieder, wobei die
nichtlineare Dynamik Spezialprogramme erfordert und daher auch in dem verwendeten Programm nur eingeschränkt (Dynamik mit Vorspannung) realisiert ist.
Die 3 übrigen Bereiche basieren auf Potenzialgleichungen und finden sich in
den stationären und instationären Potenzialproblemen, jeweils auch als nichtlineare Probleme wieder.
Eine wichtige Funktionalität eines FEM-Programms ist die Kopplung dieser
unterschiedlichen Bereiche, z.B. die Berechnung eines Temperaturfelds als Potenzialproblem und die daraus resultierenden Verformungen, Spannungen und Kräfte
in der linearen Statik.
2.1
Lineare Statik
Die lineare Statik versteht sich als der Problembereich, in dem die Beanspruchungen der zu berechnenden Bauteile im elastischen, d.h. linearen Bereich des Werkstoffgesetzes erfolgen und die lokalen Verschiebungen relativ klein sind, verbunden mit kleinen Drehungen d (d < 3.5°).
Die zweite Einschränkung beruht darauf, dass die Verlagerungen der Lastangriffspunkte im Element bei der Formulierung der Gleichgewichtsbedingungen
vernachlässigt werden. Sind diese Voraussetzungen durch zu große Elemente oder
zu große Verformungen nicht erfüllt, so erhält man nur bedingt brauchbare Ergebnisse.
14
2 Die verschiedenen Anwendungsgebiete der FEM
Ein FEM-Programm arbeitet mit einer hardwareabhängigen Genauigkeit von
mindestens 13 gültigen (signifikanten) Stellen bei der Formulierung der Gleichungen, bei der Lösung des Gleichungssystems und bei der Berechnung der Kräfte
und Spannungen über die Verformungen.
Material- und damit Steifigkeitsunterschiede um den Faktor 10 7 Längeneinheiten und mehr in einer Struktur führen damit in der Regel nicht zu numerischen
Schwierigkeiten. Zu vermeiden sind jedoch sehr stark unterschiedliche Elementabmessungen innerhalb eines Strukturbereichs sowie Starrkörperbewegungen
aufgrund elastischer Lagerungen von der Art, dass die elastischen Deformationen
eines Elements in der Knotendeformation erst ungefähr ab der 5. Stelle nach dem
Komma enthalten sind.
Unter den aufgeführten Voraussetzungen wird das nachfolgende lineare Gleichungssystem formuliert:
f=K*v
(2.1)
mit f = Vektor der Knotenkräfte
K = Steifigkeitsmatrix der Struktur
v = Vektor der Knotendeformationen
Die Knotenkräfte f und -deformationen v sind auf das globale Koordinatensystem
x, y, z bezogen, dabei handelt es sich um max. 3 Kräfte (F x, Fy, Fz), 3 Momente
(Mx, My, Mz) sowie 3 Verschiebungen (vx, vy, vz) und 3 Verdrehungen (dx, dy, dz).
Die Steifigkeitsmatrix K der Struktur beschreibt das elastische Verhalten des
Bauteils. Die Größe der Koeffizienten ist abhängig von der Bauteilgeometrie und
den Werkstoffdaten. Im Falle eines einfachen Zug-Druck-Stabs als Struktur entspricht die Steifigkeitsmatrix der Federkonstanten c, sie wurde daher früher auch
Federmatrix genannt.
Zur Lösung dieses symmetrischen und quadratischen linearen Gleichungssystems wird der Cholesky-Algorithmus mit Skyline-Technik verwendet. Optional
steht für Modelle mit großen Bandbreiten ein iterativer Blockmatrizengleichungslöser zu Verfügung.
2.1.1
Mögliche Materialeigenschaften
Beachtenswert ist die Möglichkeit, jedem Element andere Materialeigenschaften
zuzuweisen. Dies ist z.B. bei Kunststoff oder Leichtmetalllegierungen erforderlich, wenn ein Temperaturgefälle vorliegt, da diese Werkstoffe stark temperaturabhängig sind.
Wie in fast allen FEM-Programmen unterscheiden wir auch in unserem Programm zwischen isotropem, orthotropem und anisotropem Material.
Bei orthotropem Material sind neben der Definition des Materialgesetzes auch
die Bezugsrichtungen über Winkeleingabe festzulegen.
2.2 Nichtlineare Statik
15
2.1.2
Zur Formulierung des Rechenmodells
Bei der Auswahl der Elemente ist Voraussetzung, dass die Eigenarten und Qualitäten aller vorhandenen Elementtypen bekannt sind (Abschn. 3.6). In der Regel
gibt es unter den verfügbaren Elementtypen für das jeweilige Problem nur ein ideales Element. Zur Formulierung des Elementnetzes gehört immer die Überlegung
über das Tragverhalten bzw. über den zu erwartenden Kraft- und Spannungsverlauf.
In Bereichen mit zu erwartenden hohen Spannungsgradienten wird man das
Netz verfeinern. In den Bereichen, die nur zur Steifigkeitserfassung und Kraftweiterleitung dienen, in denen aber keine Festigkeitsaussage verlangt wird, wird ein
gröberes Netz verwandt. Der Fehlerschätzer des Programms hilft mit der Modellbeurteilung je Lastfall bei der Beurteilung, ob die Netzqualität ausreicht.
2.2
Nichtlineare Statik
Das Grundprinzip der nichtlinearen Statik ist die Auflösung des nichtlinearen
Problems in lineare Schritte mit Lösung des in der linearen Statik beschriebenen
Gleichungssystems ergänzt um die geometrische Steifigkeitsmatrix. Diese berücksichtigt jeweils aus dem Spannungszustand des vorausgegangenen Schritts den
Energieinhalt. Dazu kommt die Addition der Verformungen nach jedem Schritt
und wenn gewünscht die Änderung des Materials gemäß der vorgegebenen Materialkurve. Das bedeutet die schrittweise Lösung von
fi = [KK + KL]* vi
(2.2)
für i = 1 bis n
mit
fi = Vektor der Knotenkräfte im Schritt i
KK = linear elastische Steifigkeitsmatrix der Struktur
KL = geometrische Steifigkeitsmatrix oder
Initialspannungsmatrix der Struktur
vi = Vektor der Knotendeformationen im Schritt i
n = max. Anzahl Iterationsschritte
Dabei gelten für jeden Schritt die in der linearen Statik definierten Voraussetzungen. Es können damit sowohl Materialnichtlinearitäten als auch geometrische
Nichtlinearitäten für kleine Dehnungen und Rotationen berücksichtigt werden.
Die Gesamtbelastung als Kraft und Moment, Verformung oder Temperaturfeld
wird schrittweise durch Lastinkremente (Teillasten) aufgebracht. Die Summe aller
Lastinkremente ist gleich der Gesamtbelastung. Dabei müssen die Lastinkremente
nicht von gleicher Größe sein. Bei dieser Vorgehensweise ist klar, dass der Benutzer die max. Anzahl der Lastschritte vorher festlegen muss. Diese Vorgehensweise
16
2 Die verschiedenen Anwendungsgebiete der FEM
wird auch als Teillastverfahren bezeichnet.
Die in Spezialprogrammen wie ABAQUS [13] oder DYNA-3D [14] vorhandene automatische Zerlegung in Lastinkremente und damit eine automatische
Schrittanpassung ist in unserem Programm nur zur Lösung instationärer Potenzialprobleme realisiert.
2.2.1
Iterationsmethoden
In unserem FEM-Programm stehen wie üblich zwei unterschiedliche Iterationsmethoden zur Verarbeitung des nichtlinearen Materials zur Verfügung, die vom Anwender je nach Aufgabe auszuwählen sind. In beiden Methoden ist die sog. mitgehende Updated-Lagrange'sche Formulierung realisiert. Eine nichtlineare
Berechnung setzt sich dabei aus der Summe linearer Berechnungen zusammen,
die im folgenden Lastschritte genannt werden.
Full Newton Raphson
Bei Full Newton Raphson erfolgt der Ablauf eines Lastschritts gemäß nachstehendem Schema:
Aufstellung der Steifigkeitsmatrix mit
Addition der geometrischen Steifigkeitsmatrix
Lösung des Gleichungssystems
Berechnen der Spannungen und inneren Kräfte mit:
Materialänderung und Berechnung der Ungleichgewichtskräfte
Addition der Knotenverschiebungen
entweder:
Nachiteration zum Ausgleich der Ungleichgewichtskräfte
oder
nächster Lastschritt (Last addieren)
Ab dem 2. Schritt wird auf die mit geänderten Material- und Geometriedaten
formulierte Steifigkeitsmatrix, die sich aus den Spannungen des vorherigen
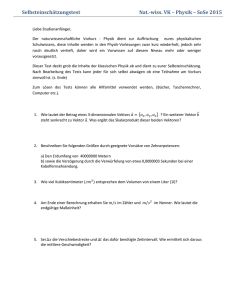
Schritts ergebende geometrische Steifigkeitsmatrix addiert und der Lösung des linearen Gleichungssystems zugeführt. Auf den jeweils nächsten Lastschritt 1R wird
erst weitergeschaltet, wenn die Ungleichgewichtskräfte (Bild 2.1) durch Lastumlagerung entsprechend der vorgegebenen Schranke ausgeglichen sind.
2.2 Nichtlineare Statik
17
Bild 1.1: Full-Newton-Raphson-Methode mit Lastschritten 1R und 2R jeweils mit Korrektur
über Lastumlagerung bei jeweils neuer Steifigkeitsmatrix
Modified Newton Raphson
Bei dieser Art der Berechnung bleibt die Steifigkeitsmatrix in einem Lastschritt
unverändert und die Ungleichgewichtskräfte werden durch Variation der rechten
Seite ausgeglichen. Dadurch wird ganz erheblich an Rechenzeit gegenüber der
klassischen Newton-Raphson-Methode gespart. Die Lastschritte sollten jedoch
möglichst klein sein.
Die Anpassung an die Materialkurve erfolgt wieder solange durch Lastumlagerung, bis die Ungleichgewichtskräfte entsprechend der vorgegebenen Schranke
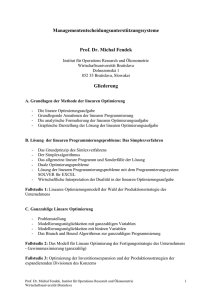
ausgeglichen sind. Dies erfolgt durch Variation der rechten Seite bei gleichbleibender Steifigkeitsmatrix (parallele Linien in Bild 2.2). Dadurch können sehr viele
Iterationen zur Berechnung eines Lastschritts mit geringer Rechenzeit durchgeführt werden. Die Geometrieänderung, die sich während eines Lastschritts ergibt,
wird erst im nächsten Lastschritt berücksichtigt. Ab dem 2. Schritt wird auf die
mit geänderten Material- und Geometriedaten formulierte Steifigkeitsmatrix die
sich aus den Spannungen des vorherigen Schrittes ergebende geometrische Stei-
Bild 2.2: Modified-Newton-Raphson-Methode mit Lastschritten 1R und 2R jeweils mit Korrektur über Lastumlagerung bei gleicher Steifigkeitsmatrix (parallele Steigung)
18
2 Die verschiedenen Anwendungsgebiete der FEM
figkeitsmatrix aufaddiert und das Gleichungssystem neu gelöst.
Der Ablauf eines Lastschritts erfolgt bei Modified Newton Raphson nach folgendem Schema:
Aufstellung der Steifigkeitsmatrix mit
Addition der geometrischen Steifigkeitsmatrix
Lösung des Gleichungssystems
Berechnen der Spannungen und inneren Kräfte
Berechnen des Verschiebungsvektors durch
Variation der rechten Seiten und
Rücksubstitution
entweder:
Nachiteration zum Ausgleich der Ungleichgewichtskräfte
und/oder wahlweise:
Materialänderung und Berechnung der Ungleichgewichtskräfte
Addition der Knotenverschiebungen
Nächster Lastschritt (Last addieren)
2.2.2
Mögliche Materialeigenschaften
Die genaue Eingabebeschreibung zur Materialänderung wird in den Abschn. 4.8
und 4.9 aufgezeigt. Hier werden nur die Möglichkeiten vorgestellt. Grundsätzlich
muss dabei das Material isotrop sein.
Veränderlicher E-Modul; --Verfahren
Am einfachsten wird der Verlauf der Materialdaten (E-Modul und Querdehnungszahl) in Abhängigkeit der Elementbeanspruchung (Dehnung) in einer Tabelle beschrieben. Zusätzlich kann dabei der E-Modul in Abhängigkeit von einer weiteren
Variablen (Zeit- oder Temperatur) definiert werden.
Bei diesem Verfahren findet keine Spannungsumlagerung statt. Die Knotenvergleichsspannungen und Dehnungen werden elementweise gemittelt. Über diese
Spannungen und Dehnungen werden dann aus der eingegebenen --Kurve den
Elementen neue Werkstoffwerte (E-Modul und Querdehnungszahl) zugeordnet.
Damit ist das Verfahren eher für nichtlinear-elastisches Werkstoffverhalten geeignet. Eine feinere Elementaufteilung als in der linearen Statik ist auf jeden Fall zu
empfehlen.
2.2 Nichtlineare Statik
19
Fließverhalten
Ein Werkstoffverhalten, bei dem bleibende Verformungen auftreten, wird allgemein als Fließen bezeichnet. Zur Modellierung eines Fließverhaltens werden drei
Gesetzmäßigkeiten benötigt:
1. die Fließbedingung,
2. die Fließregel und
3. das Verfestigungsgesetz.
Die Dehnungen und Spannungen werden in einzelnen Integrations-(Gauß)Punkten verarbeitet. Falls Fließen auftritt, werden die Dehnungen in einen elastischen und einen plastischen Anteil aufgeteilt. Aus diesen Werten wird eine elastoplastische Materialmatrix gebildet, die das Fließverhalten eines jeden Gaußpunkts
simuliert. Darüber hinaus kann der Verlauf der Werkstoffeigenschaften über ein
Element veränderlich sein, dabei findet im Gegensatz zum nichtlinear-elastischen
Material (--Verfahren) eine Spannungsumlagerung statt (s. TP2000-OnlineManual Abschn. 4.3.3). Realisiert sind die Fließbedingung nach von Mises und
nach Drucker-Prager.
Federkennlinie (nur für Stabelemente)
Eine Feder wird durch die Abhängigkeit des Federwegs von einer Federkraft bzw.
einem Federmoment definiert und bezieht sich immer auf ein Stabelement. Dazu
ist die Eingabe einer Federkennlinientabelle möglich.
Gummimaterial
Realisiert ist das Materialgesetz nach Mooney-Rivlin. Bei diesem Materialgesetz
ergeben sich die Spannungen aus der Ableitung des Funktionals der Verzerrungsenergie nach den Verzerrungen. Es gilt
ij = W / ij
(2.3)
Ein solches Material wird hyperelastisch genannt. Grundlegende Annahmen für
die Berechnung mit Gummi bestehen darin, dass das Material inkompressibel ist
und dass das Hooke'sche Gesetz für einfachen Schub gilt. Von Rivlin wurde die
Verzerrungsenergie in einer unendlichen Reihe entwickelt, die dann von Mooney
folgendermaßen angenähert wurde:
W = C1 (I1 - 3) + C2 (I2 - 3)
(2.3.a)
mit C1, C2 Mooney-Konstante und I1, I2 Dehnungsinvarianten
I1 = 12 + 22 + 32
I2 = 12 22 + 22 32 + 32 12
(2.3.b)
In unserem FEM-Programm müssen unter Einhaltung des Hooke'schen Gesetzes
für Schub aus den Mooney-Konstanten ein Pseudoschubmodul und daraus mit der
Querdehnungszahl = 0.5 ein Anfangs-E-Modul berechnet werden.
20
2 Die verschiedenen Anwendungsgebiete der FEM
Pseudoschubmodul:
G = 2 · (C1 + C2)
Anfangs-E-Modul :
E = 2 · G(1 + ) = 6 · (C1 + C2) mit = 0.5
Die Querdehnungszahl kann nicht exakt als 0.5 eingegeben werden (Division
durch Null!). Die Erprobung hat gezeigt, dass die Berechnung mit = 0.495 problemlos funktioniert. Bei Formulierung des Gummimaterials über den Preprozessor
werden Anfangs-E-Modul und Querdehnzahl automatisch gesetzt.
2.2.3
Zur Formulierung des Rechenmodells
Die Verformungen an den Knoten werden i. d.R. auf die Anfangsgeometrie addiert. Damit können große Verformungen mit kleinen Verzerrungen berücksichtigt
werden.
Bei räumlichen Problemen ist zu beachten, dass durch die Änderung der ursprünglichen Geometrie aus einer reinen Plattenbeanspruchung eine Schalenbeanspruchung werden kann.
Form der Elemente
Die Elemente sollten im Ausgangszustand, besonders bei großen Verformungen,
möglichst ideale Formen aufweisen, da bei Berechnungen mit großen Verformungen Elementverzerrungen auftreten.
Wahl der Lastinkremente
Da keine automatische Schrittanpassung vorhanden ist, wird dringend empfohlen,
bei starker Änderung der Materialkenndaten, die Belastungsschritte klein zu halten. Darüber hinaus sollte der Zuwachs der Verformungen im Verhältnis der Elementgröße pro Iterationsschritt so liegen, dass jeweils die Bedingungen der linearen Berechnung eingehalten werden und insbesondere die max. Knotendrehung <
0.1 ist.
Nachiteration bei großen Verformungen
(nur für Stäbe bei Full Newton Raphson)
Die Berechnung der neuen Materialgrößen und der inneren Kräfte des Systems erfolgt nach der Lösung mit der Geometrie des i-ten Iterationsschritts. Danach erfolgt die Addition der Verschiebungen auf die Geometrie des Zustands i zur Bildung der neuen Geometrie für den nächsten Schritt i+1. Dies bedeutet, dass
Geometrie und innerer Kräftezustand nicht exakt übereinstimmen. Dieser, meist
sehr kleine Fehler, kann durch zusätzliche Iterationen (Full Newton Raphson)
nach dem letzten Lastschritt beseitigt werden. Dabei ist zu beachten, dass für jede
Nachiteration die Steifigkeitsmatrix neu erstellt und dieses Gleichungssystem neu
gelöst werden müssen.
Konvergenz- und Abbruchkriterium
Jede nichtlineare Berechnung setzt sich aus linearen Schritten zusammen. Um die
richtige, d.h. innerhalb eines Lastschritts konvergierte Lösung zu finden und zu-
2.3 Stabilitätsprobleme
21
gleich die Iterationsschleife abzubrechen, werden sog. Konvergenzkriterien verwendet.
In unserem FEM-Programm werden die Knotenverschiebungen in jedem Lastschritt i zur Bildung einer Euklidischen Norm (ENi ) benutzt:
Kmax
ENi =
mit
(vxk2 + vyk2 + vzk2 )
K=1
(2.4)
= max. Anzahl der Knoten
= Komponenten des Verschiebungsinkrements
vom Knoten k im Lastschritt i und j = 1, 2, 3
Das Konvergenzkriterium ist wie folgt definiert:
oder
Kmax
vxk, vyk , vzk
ENi 100 / EN0 < Option(175) in %
ENi - ENi-1
< 107
(2.4.a)
Falls in einem Lastschritt die Konvergenzkriterien nicht erfüllt sind, wird die
Iterationsschleife automatisch nach N Iterationsschritten (N = Option (174)) abgebrochen und der nächste Lastschritt gerechnet. Die Erfüllung einer vernünftigen
Toleranz (ca. 0.1 - 3 %) in jedem Lastschritt ist jedoch eine wichtige Voraussetzung für richtige Lösungen in weiteren Lastschritten, da diese Toleranz das Erreichen der Gleichgewichtslage am Ende jedes Lastschritts repräsentiert.
2.3
Stabilitätsprobleme
Häufig liefern lineare oder nichtlineare Spannungs- und Verformungsuntersuchungen nicht hinreichende Informationen, um Aussagen über das Versagen einer Struktur unter bestimmten Belastungen machen zu können. Beim Erreichen
einer kritischen Last kann das Gleichgewicht der inneren und äußeren Kräfte instabil werden. Schlanke Bauteile oder große Blechflächen können dadurch ausknicken oder ausbeulen.
Dazu berechnet man das sog. kritische Lastvielfaches, also die max. mögliche
Belastung bis zur Instabilität in Verbindung mit der Knick- oder Beulform. Solche
Stabilitätsprobleme werden am einfachsten als Eigenwertproblem der vorgespannten Struktur gelöst, denn aus der Dynamik sind die erforderlichen Algorithmen
schon vorhanden. Dazu wird folgendes Gleichungssystem der nichtlinearen Statik
nach dem 1. Lastschritt wie folgt umgeformt und gelöst.
Ausgehend von der linearelastischen Steifigkeitsmatrix KK und der zu den
Knotenlasten f des 1. Lastinkrements der nichtlinearen Statik aus den Spannungen
σ berechneten, geometrischen Steifigkeitsmatrix KL, erhält man die Gl. (2.5). Dabei wird von der Grundgleichung der nichtlinearen Statik ausgegangen. Diese gilt
für von Null linear anwachsende Knotenlasten λ*f, unter Annahme der konstant
22
2 Die verschiedenen Anwendungsgebiete der FEM
bleibenden Steifigkeitsmatrix KK und einer mit den Spannungen σ von Null linear
zunehmenden geometrischer Steifigkeitsmatrix λ*KL :
λ*f = [KK + λ*KL]* v
mit
(2.5)
f
= Vektor der Knotenkräfte im Lastschritt 1
KK = linearelastische Steifigkeitsmatrix der Struktur
KL = geometrische Steifigkeits- oder Initialspannungsmatrix der Struktur nach dem 1. Iterationsschritt
v = Vektor der Knotendeformationen
Dieses lineare Gleichungssystem liefert keinen endlichen Lösungsvektor v,
wenn es singulär wird. In solch einem Fall gibt es nichttriviale Lösungen v ≠ 0 für
das homogenen Gleichungssystem mit Knotenlasten 0. Das führt auf das Eigenwertproblem (2.6). Dabei sind die Eigenwerte λ kritische Lastvielfache, da sie die
Vielfachen λ*f der als 1. Lastinkrement angenommenen Knotenlasten f angeben,
die sich als kritische Knotenlasten ergeben. Die Eigenvektoren v sind dann die zugehörigen Knick- und Beulformen.
[KK + λ*KL] *v = 0
mit
(2.6)
λ = Eigenwert
v = Eigenvektor
Im Unterschied zu dem im Abschn. 2.3.1 beschriebenen Eigenwertproblem des
ungedämpften elastischen Systems in der Dynamik, bei dem die mit dem Eigenwert multiplizierte Massenmatrix M in unserem FEM-Programm eine Diagonalmatrix ist, ist die geometrische Steifigkeitsmatrix KL eine symmetrische Bandmatrix wie die Steifigkeitsmatrix KK.
2.3.1
Mögliche Materialeigenschaften
Es gelten die in der linearen Statik beschriebenen Materialeigenschaften.
2.3.2
Zur Formulierung des Rechenmodells
Es gelten die Regeln der linearen Statik.
2.4 Lineare und nichtlineare Dynamik
23
2.4
Lineare und nichtlineare Dynamik
In unserem FEM-Programm stehen zwei Verfahren zur Lösung linearer Dynamikprobleme zur Verfügung, die auch miteinander gekoppelt werden können. Nichtlineare Dynamikprobleme, wie zeitabhängige Dämpfung, nichtlineares Material oder Anschlagprobleme (das Klappern), können mit Ausnahme vorgespannter
Strukturen nicht gelöst werden. Dazu sind in der Regel Spezialprogramme erforderlich.
1. Im ersten Verfahren werden die Eigenwerte und Eigenvektoren (Eigenfrequenzen und Eigenschwingungsformen) der Struktur mit diagonaler Massenmatrix, ausgehend von einem (mit Winkelfunktionen produzierten) orthonormierten Vektorsystem, durch reziproke Simultaniteration ermittelt. Verbesserung des Iterationsergebnisses nach dem von Jennings [15] angegebenen
Verfahren und Orthonormierung mit dem Schmidt'schen Orthogonalisierungsverfahren ergeben.
Damit ergeben sich die Lösungen des Gleichungssystems für das ungedämpfte elastische System. Dabei ist abweichend vom Gebrauch in der Statik
v für den Vektor der Knotenverschiebungen und -drehungen, w für den Vektor
der Geschwindigkeiten und b für den Vektor der Beschleunigungen verwendet:
M b + [KK + KL] v = 0
mit
M
b
KK
KL
v
(2.7)
Massenmatrix der Gesamtstruktur in Diagonalform
Beschleunigungsvektor an allen Knoten
linear elastische Steifigkeitsmatrix der Struktur
geometrische Steifigkeits- oder Initialspannungsmatrix
der Struktur (nur bei Vorspannung)
Vektor aller Knotenbewegungen
Die allgemeine Bewegungsgleichung
M b + [KK + KL] v + C w = fr
mit
C
w
fr
(2.8)
Dämpfungsmatrix der Gesamtstruktur in Diagonalform
Geschwindigkeitsvektor an allen Knoten
Erregungsvektor (Kraftvektor)
aufbauend auf der durchgeführten Modalanalyse unter Berücksichtigung von
Dämpfung, muss gelöst werden. Damit können verschiedene Sonderfälle der
Bewegungsgleichung, wie die harmonische Kraft- und Fußpunkterregung, sowie eine Antwortspektrenuntersuchung für Erdbebennachweise durchgeführt
werden. Die Lösung setzt jedoch voraus, dass die aus der Addition linear elas-
24
2 Die verschiedenen Anwendungsgebiete der FEM
tischer und geometrischer Steifigkeitsmatrix gebildete Matrix nicht singulär
ist, d.h., das Modell muss, wie in der Statik, ordnungsgemäß gelagert sein. Der
Anteil der geometrischen Steifigkeitsmatrix beinhaltet den Vorspannungszustand der Struktur und wird daher nur bei Vorspannung berücksichtigt.
Die Berechnung als sog. Frei/Freischwingung, wie dies z.B. in der Luftund Raumfahrt und im Schiffbau, aber auch in der Akustik häufig vorkommt,
ist ebenfalls möglich. Durch einen einfachen Kunstgriff kann die aufgestellte
Forderung, dass die Steifigkeitsmatrix nicht singulär sein darf, umgangen werden. Durch Einführen der Kreisfrequenz und Umformen der GL. (2.8) des
Eigenwertproblems wird aus
(K - 2 ·M) ·v
= 0
(2.9)
[(K + ·M) - (2 + ) ·M] ·v = 0
(2.10)
das Eigenwertproblem
Damit ist die Anwendung weiterhin gültig und eine Lösung des Eigenwertproblems möglich. Der Wert ist eine willkürliche Konstante, die jedoch in
der gleichen Größenordnung wie das gesuchte 2 liegen sollte.
2. Die Lösung allgemeiner Dynamikprobleme mit Dämpfung und Erregung über
kondensierte Matrizen oder Modaltransformation erfolgt im zweiten Verfahren, basierend auf dem Matrizencode Symbolic Matrix Interpretive System der
University of California, Berkley [16].
Dabei wird obiges Gleichungssystem (2.8) nach vorheriger Kondensation
(Gyan-Methode) der Matrizen KK und M für auszuwählende, dynamische
Freiheitsgrade gelöst. Die Anzahl der dynamischen Freiheitsgrade ist begrenzt!
Damit können in Erweiterung zu den Möglichkeiten im ersten Verfahren auch
beliebige Erregungen, wie z.B. Stoßbelastung mit Materialdämpfung, berücksichtigt werden. Da die Auswahl der dynamischen Freiheitsgrade sehr viel Erfahrung mit dynamischen Problemen voraussetzt (die kondensierten Matrizen
müssen alle für das Problem relevanten Eigenwerte besitzen!), ist es sinnvoller, die zusätzliche Möglichkeit, die Mischung beider Methoden zu verwenden
(mixed Methode).
2.4.1
Lösung von Schallproblemen, Akustik
Voraussetzung ist die Lösung des Eigenwertproblems. Im Bereich stationärer Potenzialprobleme (Abschn. 2.5) führt dies auf die Aufgabe zurück, für das eigentliche Eigenwertprogramm die quasi Steifigkeitsmatrix K (hier Potenzialmatrix P)
mit der dazu gehörenden Quasi-Massenmatrix M zu formulieren. Dies geschieht
durch geeignete Wahl der Werkstoffdaten für die Matrix K und (als QuasiDichte) in der Materialeingabe.
2.5 Stationäre und instationäre Potenzialprobleme
25
Bei Schallproblemen ist als Werkstoffkonstante der Wert für Luft ( = 1) einzutragen, Quasi-Dichte ergibt sich zu
= g/c2 = 0.00008486 1/m
mit
und
(2.11)
c = 340 m/s Schallgeschwindigkeit
g = 9,81 m/s2 Erdbeschleunigung
Die bei Eingabe über FEMAP einzugebende Dichte wird automatisch mit g = 9.81
multipliziert, sodass dort eine Pseudo-Dichte als
1/c2 = 0.86505*10-5 s2/m2
einzugeben ist.
Zur Berechnung der Massenmatrix aus den „Eigengewichtskräften“ ist die Eigengewichtsbelastung in x-Richtung anzufordern { Load > Create Body Loads >
Acceleration > x = 1.0 > Set = 1 > ok }.
Bei der Formulierung des Rechenmodells ist weiter zu beachten, dass der Programmteil Dynamik auf der linearen Statik aufsetzt. Da die Potenzialmatrix nur
einen Freiheitsgrad pro Knoten besitzt (das Potenzial p), darf hier jeder Knoten
nur den Freiheitsgrad vx aufweisen!
2.4.2
Mögliche Materialeigenschaften
Es gelten die in der linearen Statik beschriebenen Materialeigenschaften.
2.4.3
Zur Formulierung des Rechenmodells
Es gelten die Regeln der linearen Statik zur Formulierung des Rechenmodells.
2.5
Stationäre und instationäre Potenzialprobleme
Bei den Potenzialproblemen unterscheiden wir zwischen stationären Problemen,
bei denen alles im Gleichgewicht ist und die Zeit somit keine Rolle spielt, wie z.B.
bei einer konstanten, laminaren Strömung, und instationären Problemen, bei denen
alles zeitabhängig ist, wie z.B. die Aufheizung eines Körpers.
2.5.1
Analogie der Potenzialprobleme
Zum besseren Verständnis der Potenzialprobleme ist nachfolgend die Analogie
zwischen allen beschriebenen Problemen aufgezeigt. Zur Erinnerung: die zu ver-
26
2 Die verschiedenen Anwendungsgebiete der FEM
wendende Energieeinheit ist 1 J = 1 Nm = 1000 Nmm = 1 Ws = 0.2389 cal.
Nachfolgend sind Erklärungen und Hilfsgrößen eingerückt.
a) Wärmefluss
p=T
grad T
b
K oder C
K/mm
J/mm2hK
J/mmhK
q
= Vektor der Knotentemperaturen
= Gradient, Temperaturgefälle
= Wärmeübergangszahl
= Wärmeleitwert als Werkstoffkonstante bei isotropem
Material
= Wärmeleitmatrix
= - 1 · grad T = - · grad T
1 (Einheitsmatrix) bei orthotropem Material
=
q
Q
J/mm2h
J/mm3h
F
=
=
Q =
=
A =
x
0
0
y 0
0
0
0
z
Wärmefluss pro Flächeneinheit
Wärmequellenstärke pro Volumeneinheit
div q
q · A + Q · Elementvolumen = Wärmeflussmenge
Flächen-Normalenvektor
b) Drehungsfreie Strömung
p = mm2/s
grad mm/s
=
=
v =
=
Vektor Geschwindigkeitspotenzial
Geschwindigkeitsvektor v
grad
1 (Einheitsmatrix)
[ ] =
q
mm/s
Q
1/s
F
=
q =
=
Q =
A =
=
1 0 0
0 1 0
0 0 1
Randabfluss/-zufluss-Vektor
- vn
Quellenstärke (Q = 0; quellenfreie Strömung)
div v
Flächen-Normalenvektor
Flussmenge q·A + Q ·Elementvolumen
c) Akustik (Schall)
p
grad p
N/mm2
= Schalldruckvektor (Amplitude)
nicht vorhanden
2.5 Stationäre und instationäre Potenzialprobleme
= 1 (Einheitsmatrix)
=
q
= 0
qn = p / n = 0,
qn = p / n = - p · b,
=
Q
1 0 0
0 1 0
0 0 1
schlaffer Rand
starrer Rand
flexibler Rand
0
d) Magnetfeld
p
H
µ
B
= = Vektor magnetisches Potenzial
= Vektor magnetische Erregung (Feldstärke) oder
Magnetisierung
H = - grad
Vs/Amm
oder H/mm = Permeabilität, Induktionskonstante als
= 1/ µ
oder Werkstoffkonstante oder Matrix bei
orthotropem Material
µ = µr · µo; mit µo = Permeambilität des Vakuums und
µr = Permeambilitätszahl
Vs/mm2
oder Tesla = magnetische Induktion, Magnetfeld
B = µ ·H
µx 0 0
µ = 0 µy 0
0 0 µz
A
A/mm
div B
F
= 0 keine Quellen!
= div B · Elementvolumen = Flussmenge
e) Elektrisches Feld
p
E
V
V/mm
=
=
E =
As/Vmm =
=
U Vektor des elektrischen Potenzials
Vektor elektrische Feldstärke
gad U
Dielektrizitäts-Konstante (isotrop)
1 · o
= Dielektrizitäts-Matrix bei orthotropem Material
=
x 0 0
0 y 0
0 0 z
27
28
2 Die verschiedenen Anwendungsgebiete der FEM
D
Q
F
A s/mm2 = Vektor dielektrische Verschiebung
D = ·E
A s/mm3 = Ladungsdichte
= D · A + Q · Elementvolumen = Flussmenge
A = Flächen-Normalenvektor
Zusammenstellung der Analogie der Potenzialprobleme
(a)
(b)
T
p
grad T grad p
=1
q
q
Q
Q
(c)
(d)
(e)
p
=1
q
Q=0
H
µ
B
div B=0
U
E
D
Q
Potenzial
Gradient
Werkstoff
Flussmenge
Quellenstärke
2.5.2
Grundlagen der stationären Potenzialprobleme
Mit dem Programmteil „stationäre Potenzialprobleme“ können alle Probleme gelöst werden, die sich auf nachfolgendes Gleichungssystem zurückführen lassen:
P·T+F=0
mit
(2.11)
P = Potenzialmatrix
T = Vektor der Potenziale an allen Knoten (z.B. Temperaturen)
F = Vektor der Flussmengen, Quellen
Das Gleichungssystem lässt sich mit dem der linearen Statik vergleichen. Dabei
entspricht die Potenzialmatrix P der Steifigkeitsmatrix K, der Vektor der Potenziale T der Knotendeformation v und der Vektor der Flussmengen F den Knotenkräften.
Eine der vorrangigsten Anwendungen des Programmteils ist die Lösung von
Wärmeflussproblemen. Daher beziehen sich alle nachfolgenden Beschreibungen
auf diese Aufgabe. Hat man die Problemstellung des Wärmeflussproblems erkannt, lassen sich aufgrund der beschriebenen Analogie alle gängigen Potenzialprobleme formulieren und mit dem Programmteil lösen.
2.5.3
Zur Formulierung des Rechenmodells
Die Modellerstellung erfolgt wie in der linearen Statik mit den notwendigen Ergänzungen in der Bandbreitenminimierung, den Werkstoffdaten, den Potenzialverknüpfungen, wenn vorhanden { Model > Constraint > Set >> Create Cons-
2.5 Stationäre und instationäre Potenzialprobleme
29
traints Equations als Potenzialverknüpfung } oder automatisch über Kontaktrandbedingungen der Statik, sowie in den Randbedingungen mit {Model >
Load > Nodal > Define Nodes >> Temperature } oder { Model > Load > Elemental > Define Elements >> Heat Flux (an Elementoberflächen) oder Heat
Generation (elementbezogene Wärmequellen) oder Convection (bei Umgebungsbedingungen) > Values = x > ok }.
Das Material ist isotrop oder orthotrop und kann nichtlinear, also abhängig,
vom Potenzial sein.
Für das stationäre Potenzialproblem ergibt sich pro Knoten nur ein Freiheitsgrad, das Potenzial (die Temperatur). Die Gesamtanzahl der Freiheitsgrade und
damit der Gleichungen ist gleich der Anzahl der wirksamen Knoten (durch Elemente angesprochen) unter Berücksichtigung der Potenzialverknüpfungen abzgl.
der Knoten, für die als Randbedingung ein Knotenpotenzial vorgegeben wurde.
Für diese Knoten erhält man in der Ergebnisliste analog zur Statik entsprechend
den Stützgrößen die hier zu- oder abgeführte Wärmemenge bzw. einen äquivalenten Wert.
Die Tabelle der Knotenfreiheitsgrade des Potenzialproblems sowie die Anzahl
der zu lösenden Gleichungen, die der „Stützgleichungen“ und die max. Bandbreite, werden in name-p.lst ausgedruckt.
Die Erstellung des linearen Gleichungssystems (Potenzialmatrix) erfolgt analog
zur linearen Statik. Hierbei werden die vom Elementtyp her nicht verfügbaren
Elemente (z.B. Stabelement) durch eine Bemerkung angezeigt. Die Lösung des linearen Gleichungssystems (Potenzialmatrix) erfolgt mit dem gleichen Gleichungslöser wie in der Statik.
2.5.4
Mögliche nichtlineare Magnetfeldmodelle
Zur Lösung nichtlinearer Magnetfelder als 2D- oder rotationssymmetrisches Modell wird das Full-Newton-Raphson-Iterationsverfahren verwendet. Die Iterationsschleife wird jeweils mit neuer Potenzialmatrix so oft durchlaufen, bis die geforderten Konvergenzkriterien erreicht sind.
2D-Magnetfeld
Das 2D nichtlineare stationäre Magnetfeld wird im (x,y,z)-Koordinatensystem
durch folgende Gleichung beschrieben, die schrittweise gelöst wird:
- /x { B z/x } - /y { | B z/y } = Jz
mit
z = Vektorpotenzial des 2D-Magnetfelds
Jz = elektr. Stromdichte-Vektor des 2D-Magnetfelds
| B| =
Bx2 + By2
die magnetische Induktion des 2D Magnetfeldes
= 1/µ spezifischer magnetischer Widerstand des
nichtlinearen Materials B
µ = nichtlineare Permeabilität des Materials
(2.12)
A
A/mm2
T(esla)
Amm/Vs
H/mm
30
2 Die verschiedenen Anwendungsgebiete der FEM
Rotationssymmetrisches Magnetfeld
Das rotationssymmetrische, nichtlineare stationäre Magnetfeld wird durch folgende Gleichung im (r,,z)-Koordinatensystem beschrieben mit Radial-, Tangential-,
Axial-Koordinaten und schrittweise gelöst:
- /r { /r B /r (r )} - /z { B /z } = J
mit
= Vektorpotenzial des rotsym. Magnetfelds
J = elektr. Stromdichte-Vektor des rotsym. Magnetfelds
B
=
B r2 + B z 2
magnetische Induktion des rotsym. Magnetfelds
= 1/µ der spezifische magnetische Widerstand des
nichtlinearen Materials B
µ
= die nichtlineare Permeabilität des Materials
(2.13)
A
A/mm2
T(esla)
Amm/Vs
H/mm
Magnetfeld-Rechenmodell
Für lineare und nichtlineare Magnetfeldberechnungen sind für isotropes Material
folgende Randbedingungen möglich, mit c1, c2, und c3 als beliebige konstante
Werte:
oder z = c1
Dirichlet'sche Randbedingung >
magnetisches Vektorpotenzial = Konstante
/ N = 0
Neumann'sche Randbedingung >
magnetische Feldlinien stehen normal auf der Berandung
(N = Normalenvektor des Randes), diese Bedingung ist
automatisch an allen freien Rändern erfüllt
II = c2 ·I + c3
Periodizitäts-Bedingung
2.5.5
Grundlagen der instationären Potenzialprobleme
Bei der Lösung instationärer Potenzialprobleme ist folgendes Gleichungssystem
zu lösen:
P T + C T/ t + F = 0
(2.14)
bezogen auf ein Wärmeleitproblem bedeuten dabei
P
T
C
T/ t
F
Potenzialmatrix (analog Steifigkeitsmatrix K)
Vektor der Knotenpunktpotenziale (z.B. Temperaturen )
Kapazitätsmatrix
Vektor der Potenzial-Änderungen pro Zeiteinheit
Fluss-Vektor (z.B. Wärmefluss, Wärmequellen, Quellen und Senken)
2.5 Stationäre und instationäre Potenzialprobleme
31
Zur Lösung dieses zeitabhängigen Gleichungssystems wird das nachfolgend
beschriebene, vollimplizite Zeitschrittverfahren verwendet.
Vollimplizites Zeitschrittverfahren
Das vollimplizite Zeitschrittverfahren von TP2000 zeichnet sich durch numerische
Stabilität und gute Konvergenz aus. Es ist für lineare und nichtlineare Probleme
gleichermaßen geeignet. Das Verfahren lässt durch automatische Schrittanpassung
oder Schrittsteuerung variable Zeitschritte zu.
Dabei werden in Gl. (2.15) das Potenzial T und der zeitliche Differentialquotient T/ t durch folgende Ausdrücke ersetzt:
mit
T = Tt + Tt
(2.16)
T/ t = ((Tt - Tt1) - A2 Tt + A3 (Tt + Tt)) / (A1 t)
(2.17)
A1 = 2, A2 = 4, A3 = 3
bei festem Zeitschritt ( t1 = t )
(Tt - Tt1), Tt und (Tt + Tt) sind die Temperaturvektoren zu den Zeitpunkten
t - t1 , t und t + t .
Mit den Gl. (5.15) und (5.16) ergibt sich das folgende Gleichungssystem für
T = Tt + Tt
{P + (A3 / (A1 t)) · C } · (Tt + Tt ) =
-F + 1 / (A1 t) · C · (-(Tt - Tt1) + A2·Tt)
(2.18)
Bei Anforderung der Schrittanpassung mit Änderung des Zeitschritts über Optionen werden die Faktoren A1, A2 und A3 automatisch korrigiert. Die Lösung
nichtlinearer Probleme (temperaturabhängige Matrizen, P C, F) erfordert die Einführung einer Iterationsschleife (Index i), die innerhalb der Zeitschleife geführt
wird.
Ausgehend von Schätzwerten
Tti-1 + Tt = Tt
für i = 1
(2.19)
wird das Gleichungssystem für i = 1, 2 .. imax
{P i -1 + (A3 / (A1 t)) · C i -1 } · (Tt +Tt ) =
-F i -1 + 1 / (A1 t) · C i -1· (-(Tt -Tt1) + A2·Tt)
(2.20)
iterativ gelöst. Dabei ist P i -1 eine abgekürzte Schreibweise für P (Tti -1 + Tt) .
Die Korrektoriteration wird abgebrochen, wenn die Beträge der relativen Temperaturänderungen
32
2 Die verschiedenen Anwendungsgebiete der FEM
( Tti + Tt - Tti-1 + Tt ) / ( Tti + Tt )
(2.21)
an allen vom Anwender vorgegebenen Knoten einen vorgegebenen Schwellwert
unterschreiten (in Datenart POTI der Zusatzeingabe name.zus (s. Abschn. 8.3.5)
über Kennworte KNR1 - KNR5 bzw. TAM1 - TAM5 max. können 5 Knoten ausgewählt werden). Ist dies nach imax Schritten nicht der Fall, so wird der Rechenlauf
abgebrochen.
Formulierung des Rechenmodells
Bei der Formulierung des Rechenmodells ist zu beachten, dass das Elementnetz
dort fein sein muss, wo eine starke örtliche Änderung der Lösung zu erwarten ist.
Bei stationären Problemen, in denen nur eine Lösung berechnet wird, ist dies ein
eindeutiges Kriterium. Beim instationären Problem mit einer Reihe von Lösungen
ist die Beurteilung schwieriger, da sich die Erfordernisse möglicherweise ändern.
Als wichtige Hilfe dient das Prüfprotokoll der Modellbeurteilung, welches bei der
Flussmengenmittelung anfällt. Dieses ist sehr sorgfältig zu lesen.
Wird z.B. ein Körper mit konstanter Anfangstemperatur von der Oberfläche her
stark erwärmt, so entsteht dort ein großer Temperaturgradient. Dem ist mit einer
feineren Aufteilung nahe der Oberfläche Rechnung zu tragen, die später nicht
mehr erforderlich ist.
Gegenüber dem stationären Problem ist das instationäre Problem zeitabhängig
und benötigt zusätzlich nachfolgend aufgeführte Eingaben.
Steuerung des Zeitschritts
(Über Optionfile oder als Datenart POTI in Zusatzeingabe name.zus gemäß Abschn. 8.3.5) mit
Startzeit t1, (TIM1), Endzeit t2 (TIM2) und Zeitschritt t (DELT) sowie Anzahl
Iterationen i (ITER) als zusätzliches Abbruchkriterium der Iteration.
Zur Verbesserung der Lösung steht eine automatische Schrittanpassung des
Zeitschritts t mit wahlweise zusätzlicher Korrektoriteration (Nachiteration mit
Konvergenzkriterium) zur Verfügung.
Startvektor T0
In der Regel als konstanter Wert für alle Knoten über TSTA in Datenart POTI
oder als Feld über { Loads > Create Nodal Temperaures }.
Materialdaten
Die Materialdaten müssen um die Wärmekapazität aus Dichte und spezifischer
Wärme c (ROCE = c ) bzw. den äquivalenten Werten eines Potenzialproblems
ergänzt werden. Zusätzlich können Tabellenwerte zur Berücksichtigung beliebiger
Nichtlinearitäten oder Phasenübergänge berücksichtigt werden.