1 Allgemeine Einführung - RWTH Aachen University
Werbung

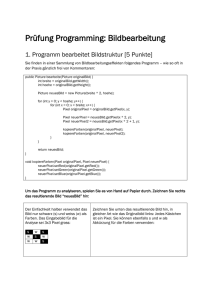
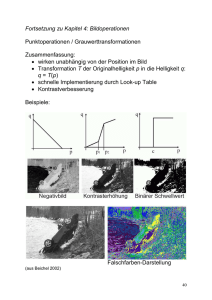
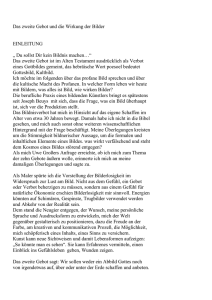
Fraunhofer-Institut für Lasertechnik ILT Steinbachstrasse 15 52074 Aachen Tel. 0241 8906 0 www.ilt.fraunhofer.de Algorithmen zur Bildverarbeitung für die Prozessbeobachtung und regelung bei der Lasermaterialbearbeitung Fachsemester 5 Aachen, den 8.12.2009 Name : Frédéric Schulze Matrikelnr.: 999524 Professor: Dr. Wilhelm Hanrath Betreuer: Dr. Alexander Drenker Unterschrift Auszubildender Unterschrift Betreuer Inhaltsverzeichnis 1 1.1 1.2 1.2.1 Allgemeine Einführung Einleitung Kameras und Licht Belichtung 4 4 4 6 2 2.1 2.2 2.3 2.4 Störeinflüsse Salt & Pepper Noise Shot Noise Gaussian Noise Quantization Noise 7 7 7 7 8 3 3.1 3.2 3.2.1 3.2.2 3.2.3 Segmentierung von monochromen Bilder Techniken der Segmentierung Wahl eines geeigneten Schwellwerts Manueller Schwellwert Globale Schwellwertberechnung nach Otzu Adaptive Schwellwertberechnung 9 9 9 9 10 11 4 4.1 4.1.1 4.1.2 4.1.3 4.1.4 4.2 4.2.1 4.2.2 4.2.3 Nachverarbeitung der segmentierten Bilder Morphologische Basisoperatoren Dilatation Erosion Opening Closing Weiterführende morphologische Operatoren Randerkennung Distanztransformation Der Hit or Miss Operator 12 12 12 12 13 13 14 14 14 15 5 5.1 5.2 5.3 5.3.1 5.3.2 5.3.3 Auswertung der Binärbilder Nachbarschaften von Pixeln Region Labelling Eigenschaften der Regionen Flächenberechnung Schwerpunktsberechnung Kreisförmigkeit 15 15 15 16 16 16 17 6 6.1 Orts- und Frequenzraum Transformationen für die Bildbearbeitung 17 17 2 6.2 6.3 6.4 6.5 6.6 6.6.1 6.6.2 6.6.3 Fourier Transformation Fast Fourier Transformation Faltungen Korrelationen Filter Durchschnittsfilter Gaußfilter Medianfilter 18 21 21 22 23 23 25 27 7 Kanten und Ableitungen 28 8 8.1 8.2 8.3 8.4 8.5 Anwendungen im Institut für Lasertechnik Geschwindigkeitsmessung mittels Kreuzkorrelation Nahtfolgeerkennung mittels Konturerkennung Referenzfilmvergleich mittels Kreuzkorrelation Zählungen von Pulververteilungen Intensitätsverteilungen beim Laserbohren 29 29 29 30 30 30 9 Zusammenfassung 31 3 1 Allgemeine Einführung 1.1 Einleitung Diese Seminararbeit bietet eine Einführung in die Grundlagen der digitalen Bildverarbeitung und stellt Algorithmen für die Verarbeitung von monochromen Bildern vor. Der Bezug zur praktischen Anwendungen wird durch Beispiele aus dem Bereich der Lasertechnik hergestellt. Vorgestellt werden verschiedene Algorithmen zur Segmentierung, Nachverarbeitung und Auswertung von Bildern. Die Wirkungsweise wird an Hand von Beispielen in erklärenden Abbildungen gezeigt. Des Weiteren wird auf Einsatzgebiete und Vorteile verschiedener Transformationen eingegangen. Außerdem wird auf die Funktionsweise eines optischen Aufnahmesystem und das Auftreten verschiedener Störeinflüsse und dafür geeignete Filter eingegangen. Die Bedeutung von Ableitungen zur Kantenerkennung wird ebenfalls kurz erläutert. 1.2 Kameras und Licht Ebenso wie das menschliche Auge sind Kameras mit Halbleiter-Bildsensoren (CCD, CMOS) durch den Bereich ihrer spektralen Empfindlichkeit charakterisiert. Das menschliche Auge nimmt auch nur einen kleinen Bereich des elektromagnetischen Spektrums wahr. Ein Mensch kann weder ultraviolettes noch infrarotes Licht sehen, da einerseits die Linse seines Auges im UV-Bereich nicht transparent ist und andererseits die Rezeptoren in der Netzhaut seines Auges in diesen Wellenlängenbereichen unempfindlich sind. Bild 1 Wellenlängen- und Frequenzbereich des Lichts 4 Kameras verfügen über einen Verschlussmechanismus über den ihre Belichtungszeit gesteuert wird [2]. Im Belichtungszeitintervall sammelt die Kamera Photonen ihres Wellenlängenbereiches auf ihrem Sensorchip und wandelt diese in Fotoelektronen um. Um diese Elektronen zu erzeugen wird bei Halbleiter Bildsensoren eine Photodiode eingesetzt die einen Kondensator lädt. Für jedes Belichtungsintervall wird der Kondensator neu geladen. Am Ende des Intervalls wird die Ladung des Kondensators über einen A/D Wandler abgetastet und als digitaler Wert der entsprechenden Intensität abgebildet. Jeder Pixel des Bildsensors wird über eine solche Schaltung realisiert [3]. Anschließend werden die Kondensatoren entladen und die abgetasteten Intensitäten gespeichert oder zu einem Verarbeitungsrechner übertragen [4]. Bei der Übertragung von Kameradaten zu Computer ist „CameraLink“ der momentane Industriestandard. Für die in dieser Arbeit untersuchten Algorithmen zur Bildverarbeitung genügt es sich den bildgebenden Sensor als zweidimensionales Feld vorzustellen. Bild 2 Verschlusszustände der Kamera Bild 3 Prinzipschaltbild eines Pixel Bild 4 Datenübertragung zum Computer Eine RGB Kamera nimmt Licht in drei verschiedenen Wellenlängenbereichen auf. Jeder Wellenlängenbereich wird in einem eigenen Farbkanal gespeichert. Die einzelnen Felder des Sensorchips bestehen hierzu wiederum aus einem kleinen zweidimensionalen Feld. Eine bestimmte Anzahl dieser Teilfelder nimmt dann jeweils rotes, grünes oder blauen Licht war. Die auf den Teilfeldern gezählten Photonen bestimmten die Intensität des jeweiligen Farbkanals. Aus den Intensitäten der drei Farbkanäle wird schließlich die Farbe des dargestellten Pixels gemischt. Die allgemein bekannten Farbkameras arbeiten mit dieser Technik. 5 Bild 5 Sensorchip mit Pixelausschnitt Bild 6 Bayermatrix mit Darstellung der einzelnen Farbkanäle Monochromatische Kameras nehmen hingegen immer nur einen Wellenlängenbereich des Lichts war und verfügen daher auch nur über einen Farbkanal. Die Felder des Sensorchips sind daher nicht in Teilfelder aufgeteilt, sondern zählen nur die absorbierten Photonen, deren Wellenlänge im Bereich der spektralen Empfindlichkeit des Sensors liegt. Die Anzahl der gezählten Photonen beschreibt also die Intensität des dargestellten Grauwertes. Diese Kameras, wie zum Beispiel Infrarotkameras finden in der industriellen Bildverarbeitung ihren Haupteinsatz. 1.2.1 Belichtung Über- und unterbelichtete Bilder kommen dadurch Zustande, dass zu viele oder zu wenige Photonen während des Belichtungszeitintervalls im Wellenlängenbereich der Kamera eingefangen wurden. In solchen Fällen sollte die Belichtungszeit entsprechend reduziert bzw. erhöht werden, um eine gleichmäßigere Intensitätsverteilung des Bildes zu gewährleisten. Sollten trotz der kleinst möglicher Belichtungszeit zu viele Photonen auf den Sensorchip ankommen, lässt sich der Photonenfluss über Graufilter oder verkleinerte Blendenöffnungen abschwächen. Letzteres vergrößert die Schärfentiefe zu Lasten des Auflösungsvermögens. Die Farbtiefe einer Kamera beschreibt die Anzahl der verschiedenen darstellbaren Intensitäten. Die Anzahl der Intensitätstuffen berechnet sich aus zwei hoch der Farbtiefe. Eine 8 Bit Kamera hat also 256 Intensitätstuffen. Bei einem monochromen Bild repräsentieren die Intensitätstuffen 6 die unterschiedlichen Grauwerte der Pixel und bei einem RGB Bild die verschiedenen Helligkeiten des jeweiligen Farbkanals eines Pixels. Kameras mit höheren Farbtiefe unterteilen ihre Abbildung also deutlich feiner. 2 Störeinflüsse 2.1 Salt & Pepper Noise Diese Form des Rauschens kennzeichnet sich durch das Auftreten von weißen und schwarzen Pixeln. „Salt & Pepper Noise“ wird durch Bitfehler auf dem Übertragungsweg verursacht. Die Bitfehler auf dem Übertragungsweg werden durch sich in die Übertragung einkoppelnde Störfrequenzen verursacht. Das hochfrequente Störsignal induziert durch sein elektromagnetisches Feld eine Spannung in den Leiter, wodurch eine impulsartige Signalverfälschung erfolgt. Deswegen wird diese Rauschform auch häufig als Impulsrauschen bezeichnet. Bild 7 Salt & Pepper Noise 2.2 Shot Noise „Shot Noise“ wird durch die Fluktuation der gezählten Photonen verursacht. Bei dunklen Bildern ist die Fluktuation in der Regel höher als bei einer gut ausgeleuchteten Szene. Die „Shot Noise“ tritt zufällig auf und lässt sich über eine Passion Verteilung beschreiben. Bei Bildern mit hoher Auflösung ergibt sich ein großer Stichprobenumfang und die Passion Verteilung kann über eine Gaußverteilung genähert werden. 2.3 Gaussian Noise Das Rauschen ist gleichmäßig über die Abbildung verteilt und ist unabhängig von der Signalintensität des Bildes. Gaußförmiges Rauschen wird primär durch das thermische Rauschen des Aufnahmesystems und Rauschanteile, die beim entladen der Kondensatoren entstehen verursacht. 7 Bild 8 Gaussian Noise 2.4 Quantization Noise Diese Art des Rauschens wird durch Signalschwankungen um die Quantisierungsstuffen des Aufnahmesystems verursacht. Schon bei leichten Schwankungen muss sich der A/D Wandler bei der Abtastung des Signals zwischen zwei Intensitäten entscheiden. Dieser Effekt lässt das Bild schließlich verrauscht erscheinen. Die mittlere Abweichung zum eigenlichten Wert entspricht also immer der halben Länge einer Quantisierungsstuffe. Wenn das Aufnahmesystem seinen Bereich des elektromagnetischen Spektrums gröber quantisiert erhört sich die mittlere Abweichung der analogen Werte entsprechend und die Rauschanteile nehmen proportional zu. Bild 9 Beispiel eines Quantisierungsschemas 8 3 Segmentierung von monochromen Bilder 3.1 Techniken der Segmentierung Bild 10 Aufbau eines Binärbildes Der Konvertierungsalgorithmus schaut sich jedes Pixel des Graubildes an und setz es unter Berücksichtigung eines Schwellwertes auf einen binären Wert. Es wird hierbei zwischen drei verschiedenen Techniken unterschieden. Bei der einseitigen Betrachtung werden alle Pixel mit Intensitäten oberhalb des Schwellwertes auf eins gesetzt und alle anderen auf null. Bei der zweiseitigen Betrachtung müssen sich die Intensitäten der Pixel in einem Schwellwertintervall befinden um auf eins gesetzt zu werden. Alle außerhalb des Intervalls werden auf null gesetzt. Die dritte Möglichkeit ist es eine Liste diskreter Werte an zugeben und anschließend das Bild nach diesen zu segmentieren. Mit diesen Techniken lassen sich sehr gut Objekte von Hintergrund segmentieren. 1, wenn F i, j T FT [i, j ] 0, sonst 1, wenn T1 F [i, j ] T2 1, wenn F [i, j ] FT [i, j ] FT [i, j ] 0, sonst 0, sonst Einseitig Bild 11 Original 3.2 Wahl eines geeigneten Schwellwerts 3.2.1 Manueller Schwellwert Zweiseitig Diskrete Werte Bild 12 Segmentiert Der Schwellwert kann manuell festgelegt werden. Hierzu empfiehlt es sich das Histogramm des Bildes zu betrachten [Abbildung 11]. 9 Bild 13 Graubild Bild 14 Histogramm Bild 15 Binärbild Der große Peak des Histogramms [14] sind die Grauwerte des helleren Hintergrunds [13]. Der kleine Peak umfasst die Helligkeitswerte des dunklen Rechtecks. Wird der Schwellwert aus dem Bereich zwischen den beiden Peaks gewählt so lässt sich das Rechteck gut vom Hintergrund segmentieren [15]. Außerdem gibt es die Möglichkeit einen geeigneten Schwellwert automatisiert zu berechnen. Hierbei wird zwischen globalen und lokalen Methoden unterschieden. Im Folgenden wird jeweils eine gängige Methode aus beiden Bereichen vorgestellt. 3.2.2 Globale Schwellwertberechnung nach Otsu Bei der globalen Schwellwertberechnung werden aus den Pixelhelligkeiten des gesamten Bildes zwei Intensitätsverteilungen berechnet, durch die sich die abgebildete Szene möglichst klar unterscheiden lässt. Um diese Verteilungen zu errechnen ist es nötig die zufällig auftretenden Intensitäten der Pixel in geeigneter Weise zu beschreiben. Da sich bei einer Berechnung über ein Gesamtbild eine große Anzahl an Pixeln ergibt, eignet sich die gaußsche Normalverteilung sehr gut zur näherungsweisen Beschreibung dieses Verhaltens. Das im Jahr 1979 von Nobuyuki Otsu entwickelte Verfahren beschreibt die Streuung der Grauwerte auf Basis der gaußschen Normalverteilung und ist deshalb das quasi Standardverfahren zur globalen Schwellwertberechung. Prinzipiell wird eine Verteilung der Grauwerte unterhalb eines freiwählbaren Schwellwertes und eine Verteilung oberhalb des Schwellwertes berechnet. Anschließend wird die Interne- und die Zwischenvarianz dieser beiden Verteilungen bestimmt. Die Zwischenvarianz beschreibt den Abstand zwischen den beiden Verteilungen und die interne Varianz drückt ihre Ähnlichkeiten aus. P(g) ist die Auftrittswahrscheinlichkeit der Grauwerte. t K o : Po (t ) p( g ) K1 : P1 (t ) g 0 Wahrscheinlichkeit <= T t p( g ) g t 1 1 P0 (t ) Wahrscheinlichkeit > T g 0 und g 1 sind die arithmetischen Mittel der beiden Verteilungen. t 02 (t ) ( g g 0 ) 2 p( g ) 12 g 0 Varianz der ersten Verteilung t (g g ) g t 1 1 2 p( g ) Varianz der zweiten Verteilung 10 Die interne Varianz ergibt sich aus der Summe der Einzelvarianzen gewichtet mit der Gesamtwahrscheinlichkeit der Grauwerte innerhalb einer der beiden Verteilungen zu liegen. in2 (t ) P0 (t ) * 02 (t ) P1 (t ) * 12 Interne Varianz Die Zwischenvarianz ergibt sich aus der Summe von zwei Verteilungsfaktoren. Der Faktor einer Verteilung berechnet sich aus den quadratischen Abständen ihres Mittelwerts zum Mittelwert des Bildes und einer Gewichtung mit der Wahrscheinlichkeit der Lage aller Grauwerte innerhalb dieser Verteilung. 2 zw P0 (t ) * ( g 0 g ) P1 (t ) * ( g1 g ) 2 Zwischenvarianz 2 2 zw (t ) Q(t ) 2 in (t ) Quotient der Varianzen Anschließend wird ein Quotient aus der Zwischen- und Inneren Varianz gebildet. Dieser Quotient erreicht sein Maximum, wenn die Zwischenvarianz möglichst groß und die interne Varianz möglichst gering ist. Ziel ist es also die zwei gaußschen Normalverteilungen zu finden deren eigene Varianzen am geringsten sind, aber gleichzeitig die größtmögliche Gesamtvarianz besitzen. Um diesen Grauwert zu finden wird der Schwellwert entlang des Farbraumes inkrementiert und anschließend der Grauwert ausgewählt, der den größten Quotienten besitzt. Eine sinnvolle Optimierung ist es sicher unter Betrachtung des Histogramms den Schwellwert nur über die relevanten Teile des Intensitätsbereiches zu inkrementieren. 3.2.3 Adaptive Schwellwertberechnung Die adaptive Schwellwertberechnung wird oft auch als lokale oder dynamische bezeichnet. Es wird eine Struktur über das Bild bewegt und für jede neue Position der Struktur wird ein lokaler Schwellwert bestimmt mit dem dann der Bildausschnitt unterhalb der Struktur segmentiert wird. Auch hier gibt es mehrere Verfahren. Die einfachste Möglichkeit ist es den Median oder den Durchschnitt der Pixel als lokalen Schwellwert zu verwenden. Dies funktioniert gut, weil alle zur Berechnung beitragenden Pixel einen Mittelwert ergeben der sich zwischen Hintergrund und Objekt befindet, sofern diese sich von ihrer Intensität deutlich unterscheiden. Sollte dieser Unterschied auf Grund von Rauschen oder anderen Störgrößen jedoch undeutlich sein so versagen diese Verfahren. In einem solchen Fall empfiehlt es sich ein iteratives Verfahren zu verwenden. Die großen Vorteile eines solchen Verfahrens sind, dass es sehr robust gegen Störeinflüsse ist und die Qualität des Schwellwerts über die Anzahl der Iterationen gesteuert werden kann. Zunächst wird empirisch eine Startschwellwert bestimmt und es werden die Durchschnitte der Pixel kleiner gleich dem Schwellwert und oberhalb des Schwellwertes berechnet. Der neue Schwellwert ist der Mittelwert der beiden Durchschnitte. Anschließend wird das Verfahren unter Verwendung des in der vorherigen Iteration berechten Schwellwertes solange wiederholt bis sich der errechnete Schwellwert nicht mehr vom vorherigen unterscheidet oder eine vorgegebene maximale Anzahl an Iterationen erreicht ist. Eine maximale Iterationsanzahl ist nur dann sinnvoll, wenn die Schwellwerte mit gleichbleibendem Rechenaufwand bestimmt werden sollen, da dies zu schlechteren Segmentierungsergebnissen führen kann. 11 Bild 16 Original Bild 17 Global 4 Nachverarbeitung der segmentierten Bilder 4.1 Morphologische Basisoperatoren Bild 18 Lokal Morphologische Operatoren bewirken Umformungen im Bild. Die grundlegenden morphologischen Transformationen werden als Dilatation and Erosion bezeichnet. Sie eignen sich zur Nachverarbeitung der segmentierten Bilder. Hauptsächlich werden sie zum Filtern von Rauschen und zum Isolieren beziehungsweise Verbinden von nahegelegenen Objekten eingesetzt. Die generelle Idee ist es eine Struktur mit einem Befestigungspunkt über ein Bild zu verschieben und die unterliegenden Pixel zu glätten. Im Folgenden wird zur Erklärung der verschiedenen Operatoren von einer rechteckigen Struktur mit einem zentralen Befestigungspunkt ausgegangen. 4.1.1 Dilatation Bei der „Dilatation“ wird für jede Position der Struktur auf dem Bild die maximale Intensität ermittelt. Die Pixel unterhalb des Befestigungspunktes der Struktur werden auf das lokale Maximum gesetzt und die Struktur wird weiter auf dem Bild verschoben. Dieses Verhalten versucht eine Vergrößerung der Objekte und eignet sich deshalb gut zum Füllen von Löchern, die oft bei der Segmentierung des Bildes entstehen oder zum Verbinden von zerteilten Objekten. 4.1.2 Erosion Bei der „Erosion“ wird für jede Position der Struktur auf dem Bild die minimale Intensität ermittelt. Die Pixel unterhalb des Befestigungspunktes der Struktur werden auf das lokale Minimum gesetzt und die Struktur wird weiter auf dem Bild verschoben. Diese Verhalten führt versucht eine Verkleinerung der Objekte und eignet sich dadurch besonders gut zum filtern von Rauschen. 12 Bild 19 Original 4.1.3 Bild 20 Dilataion Bild 21 Erosion Opening Der Begriff „Opening“ beschreibt eine Sequenz der „Erosion“ und „Dilation“. Damit wird zunächst das Rauschen entfernt und die beim Filtern des Rauschens entstehenden Löcher und zerteilen Objekte wieder aufgefüllt bzw. verbunden. Diese Technik wird oft zum Zählen von Objekte in Binärbildern eingesetzt. 4.1.4 Closing Der Begriff „Closing“ beschreibt eine Sequenz der „Dilation“ und „Erosion“. Es werden zunächst die nahegelegenen Objekte miteinander verbunden und die Löcher innerhalb der Objekte gefüllt. Anschließend wird das übrig gebliebene Rauschen, das während der „Dilation“ keinem Objekte zugeordnet werden konnte entfernt. Bild 22 Fingerabdrucksscan mittels Opening & Closing 13 4.2 Weiterführende morphologische Operatoren Morphologische Operatoren eignen sich nicht nur zur Nachverarbeitung segmentierter Bilder, sondern auch zur Formerkennung. Im Folgenden werden zwei einfache Operatoren auf Basis der Dilatation und Erosion zur Bestimmung des Objektrandes und Distanztransformation vorgestellt. 4.2.1 Randerkennung Bei der Randerkennung wird das Bild zunächst erodiert und somit die Ränder der Objekte abgetragen. Anschließend wird vom Originalbild das Erodierte abgezogen und als Differenz bleiben die im erodierten Bild abgetragen Ränder der Objekte. Bild 23 Original 4.2.2 Bild 24 Ränder Distanztransformation Bei der Distanztransformation wird der kürzeste Abstand jedes Pixels eines Objekts zu seinem Rand bestimmt. Er wird zunächst eine Randerkennung durchgeführt um die Lage des Randes zu ermitteln. Danach erodiert man das Originalbild iterationsweise solange bis das untersuchte Objekt vollständig verschwunden ist. In jedem Iterationsschritt wird als Distanz zum Rand für jedes der gerade entfernten Pixel die Iterationskonstante in einem Graubild gespeichert. Das dadurch entstehende Graubild zeigt einen ansteigenden Intensitätsverlauf zu Objektmitte. Mittels linearer Interpolation zwischen den Distanztransformationen verschiedener Objekte lassen sich die Objekte in einander umformen. 14 4.2.3 Der Hit or Miss Operator Durch morphologische Operatoren lassen sich nicht nur einfache Strukturen, sondern auch komplexere Geometrien erkennen. Der grundlegende Operator zur Erkennung solcher Geometrien ist der „Hit-or-Miss-Operator“. Der „Hit-or-Miss-Operator“ besteht aus zwei Erosionsschritten, bei denen mit unterschiedlichen Erosionsstrukturen gearbeitet wird und einer anschließenden Und- Verknüpfung der beiden Ergebnisse. Als Ergebnis des Operators entsteht ein Bild in dem alle Instanzen der gesuchten Geometrie zusehen sind. Der erste Erosionsschritt wird als Hit Schritt bezeichnet. Es wird zunächst eine Erosionsstruktur erstellt, die der gesuchten Geometrie entspricht. Bei dieser Operation werden alle Elemente gelöscht, die kleiner als das Muster sind. Übrig bleiben nur die Strukturen die größer als das Suchmuster sind. Dadurch entsteht ein Bild, das alle Objekte der Szene enthält, die dem Suchmuster entsprechen. Der zweite Erosionsschritt wird als Miss Schritt bezeichnet. Als Erosionsstruktur wird ein Muster verwendet, das den Hintergrund des gesuchten Objektes darstellt. Diese Operation wird auf dem negierten Bild der Szene ausgeführt, damit alle Objekte gefunden werden, um die sich der gesuchte Rand positionieren lies. Durch die Und- Verknüpfung werden nun die möglichen Lagen der Struktur und die Positionierungsmöglichkeiten des Hintergrunds miteinander verglichen. 5 Auswertung der Binärbilder 5.1 Nachbarschaften von Pixeln Bild 25 4er Nachbarschaft 5.2 Bild 26 8er Nachbarschaft Region Labelling Das Region Labelling ist eine Technik um die unterschiedlichen Objekte des segmentierten Binärbildes zu klassifizieren. Der Algorithmus geht über das Binärbild und gibt jedem Objekte, dass durch eine Eins repräsentiert wird einen neuen Grauwert oder Farbwert. Bei Region Labelling mit 4er Nachbarschaft wird nur auf den Hauptachsen nach Bestandteilen des Objektes gesucht und bei einer 8er Nachbarschaft werden zusätzlich die Diagonalen übergeprüft. Zunächst wird das Bild von links nach rechts und anschließend von oben nach unten bearbeitet, dabei wir eine Tabelle mit Vektoren der verschiedenen Labels angelegt. Diese Tabelle ist nötig, damit während des Bilddurchlaufes keine Labels geändert werden müssen. Ist zum Beispiel ein Objekt in einer Bildzeile gefunden worden und ergeben sich bei der Spaltensuche zwei neue Objekte, die aber in dem Objekt der Bildzeile enden und damit auch nur zu einem gehören, dann wird einfach ein weiterer Wert in den Vektor des Labels eingetragen. Die Anzahl verschieden Vektoren der Labeltabelle entspricht der Anzahl der verschiedenen Objekte. Das Region Labelling eignet deshalb auch sehr gut zum zählen von Strukturen. Anschließend wird in einer Nachverarbeitung jeder Labelvektor durch 15 einen festen Wert ersetzt. Das daraus entstehende Bild stellt die einzelnen Objekte in einem anderen Grauwert bzw. Farbton dar, wodurch sie sich sehr gut unterscheiden lassen. Bild 27 Binärbild Bild 28 Grauwerte 5.3 Eigenschaften der Regionen 5.3.1 Flächenberechnung Bild 29 Farben Die Größe eines Pixels ergibt sich aus dem Verhältnis der Auflösung zur Größe des Sensorchips. Demnach ist die Fläche einer Region die Summe der Größen, der zu ihr gehörenden Pixel. Diese Fläche ist aber leider nur die Größe mit der das Objekt im Bild dargestellt wird. Um also die tatsächliche Fläche des realen Objektes bestimmen zu können muss der Vergrößerungsmaßstab des Aufnahmesystems bekannt sein, damit die Pixelgrößen in Streckeninformationen transformiert werden können. A 1 ( x, y ) Flächenformel 5.3.2 Schwerpunktsberechnung Die Lage in X Richtung ergibt als Kehrwert der Regionsfläche multipliziert mit der Summe aller X Koordinaten, der zur Region gehörenden Pixel. Die Lage des Schwerpunktes in Y Richtung errechnet sich analog. Natürlich sind hierbei die Y Koordinaten der Pixel zu verwenden. X 1 x A ( x, y ) Schwerpunkt X Y 1 y A ( x, y ) Schwerpunkt Y 16 5.3.3 Kreisförmigkeit Die Kreisförmigkeit eines Objektes wird anhand der Ähnlichkeit einer Region zu einem echten Kreis gemessen. Die Kreisförmigkeit ergibt sich als Quotient des Mittelwerts der radialen Entfernung und der Wurzel der Varianz der radialen Entfernung. Der Begriff der radialen Entfernung beschreibt den Abstand vom Rand einer Region bis zum ihrem Schwerpunkt. Der Mittelwert der radialen Entfernung wird aus der Summe der Beträge des Abstands aller Randpixel zum Schwerpunkt berechnet. Die Varianz ist dann die Summe der quadratischen Abweichungen der jeweiligen Randdistanz im Vergleich zum errechneten Mittelwert. Umso näher der Quotient der Kreisförmigkeit an Eins liegt umso ähnlicher ist die untersuchte Region einem Kreis. R Mittelwert 1 K K 1 (x k 0 k , yk ) ( x, y) Varianz 6 Orts- und Frequenzraum 6.1 Transformationen für die Bildbearbeitung R2 1 K K 1 (x k 0 , yk ) ( x, y) 2 k C R R Quotient Bei einer Abbildung im Ortsraum wird das Bild als eine diskrete Funktion der Intensitäten dargestellt. Im Frequenzraum hingegen wird das Bild als eine Kombination der Frequenzen der verschiedenen elektromagnetischen Wellen abgebildet. Darstellungen im Frequenzraum sind für die Bildverarbeitung in verschiedenen Anwendungsbereichen von Interesse. Zum Beispiel können die im Folgenden erklärten Faltungen und Korrelationen dort wesentlich effizienter ausgeführt werden. Ein anderer wichtiger Aspekt ist die Komprimierbarkeit der Abbildungen, die an Hand einer frequenzbasierten Darstellung erheblich vereinfacht und verbessert wird. Um ein Bild in den Frequenzraum zu überführen wird eine geeignete Transformationsmethode benötigt. Die Transformationen müssen für jedes Bild eine eindeutige Darstellung ermöglichen und vollständig umkehrbar sein, damit die durch Bearbeitung im Frequenzraum erzielten Ergebnisse wieder in den Ortsraum zurück transformiert werden können. Die Bilder können dazu als zweidimensionale, diskrete Funktionen mit beschränktem Definitions- und Wertebereich aufgefasst werden. Werden die Zeilen des Bildes in einen Vektor hintereinander geschrieben, dann kann die Transformation durch eine einfache Multiplikation mit einer Transformationsmatrix realisiert werden. Um eine eindeutige Darstellung aller Bilder zu ermöglichen muss eine Transformationsmatrix bestehend aus N linear unabhängigen Funktionen gefunden werden. Die linear unabhängigen Funktionen spannen dann eine Basis im alternativen Raum auf. Eine Rücktransformation in den Ortsraum entspricht dann einer Matrixmultiplikation mit der inversen Transformationsmatrix. Da im Allgemeinen die Berechnung einer Inversen aufwändig ist, sind vor allem orthogonale Basen interessant, da hier die Inverse der Transponierten der Transformationsmatrix entspricht. Dadurch werden die Rücktransformationen in den Ortsraum erheblich vereinfacht und lassen sich wieder auf eine einfache Matrixmultiplikation mit der transponierten Transformationsmatrix zurückführen. Jede Zeile dieser Transformationsmatrix beinhaltet eine Basisfunktion der neuen Basis. Wie auch bei Vektorbasen gibt es keine eindeutige Basis, die den gesamten Raum beschreibt, sondern es können immer verschiedene Basen gefunden werden. Es können also immer M Basen 17 gefunden werden, unter denen wiederum N Orthogonalbasen existieren. Für die Bildverarbeitung sind jedoch nur die Orthogonalbasen von Interesse, deren alternative Darstellungen eine qualifizierte Aussage über das jeweilige Problem erlauben. Es gibt mehrere bekannte orthogonal Basen die eine geeignete Darstellung im Frequenzraum ermöglichen. Die Fourier Basis beseht aus komplexen, periodische Basisfunktionen, die Bildfrequenzen als eine Kombination aus Sinus- und Kosinusthermen abbildet. Die Fourier- Transformation wird hauptsächlich zur Bearbeitung von Bildern eingesetzt. Die Kosinusbasis beschreibt die Frequenzen des Bildes als eine Folge Kosinusthermen und Wavlet Basen bilden die Bildfrequenzen in Form von Basis- und Skalierungswavelts ab und sind vor allem für die Bildkomprimierung von Interesse. Ein Wavlet ist eine Schwingungsfunktion die nur in einem kleinen Intervall ihres Definitionsbereiches eine Amplitude besitzt. Durch die Skalierungswavlets wird der Ortsraum des Bildes in kleine Teilstücke zerlegt, deren Frequenzbereich dann als eine Kombination aus sich überlappender Wavlets modelliert wird [30]. Dieser Vorteil der räumlichen Separierbarkeit der Wavelettransformation ist vor allem bei der Bildkompression von großem Vorteil, da nun abhängig vom Ort Frequenzen, die keine oder nur wenige Informationen transportieren ausgelöscht werden können. Bei den anderen Transformationsmethoden transportieren die Frequenzen jedoch Informationen des gesamten Bildes. Auch hier können natürlich die informationsschwachen Frequenzen ausgelöscht werden, doch ist es leicht einzusehen, dass bei einem realen Bild die Frequenzen meist eher lokal wirken, als über den gesamten Bildbereich und deshalb eine lokales Löschen der unrelevanter Frequenzen das Originalbild bei gleicher Informationsreduktion deutlich weniger verfälscht. Bild 30 Räumliche Separierbarkeit der Wavlettransformation 6.2 Fourier Transformation Für Störfrequenzen gilt jedoch, dass sie meist gleichmäßig über das Bild verteilt sind und damit keine örtliche Lokalität besitzen. Aus diesem Grund eignet sich die Fourier-Basis besonders gut für eine Filterung von Störgrößen. Es empfiehlt jedoch die Komponenten der FourierTransformation als Eulerzahlen darzustellen, da dies den Vorteil hat, dass die Amplitude und Phase einer Welle in einer einzigen Zahl kodiert sind. Die Amplitude einer Welle beschreibt die Grauwertvariation, des durch sie verursachten Bildanteils. Deswegen lässt sich das Intensitätsspektrum des Bildes sehr gut über die Amplituden der verschiedenen Wellen steuern. Wird beispielsweise die Amplitude aller Wellen eines Bildes halbiert, dann ist es anschließend nur noch halb so hell. Für eine visuelle Darstellung des Frequenzraumes gibt es zwei Möglichkeiten. Zum einen besteht die Möglichkeit der Erzeugung eines Amplitudenbilds, das die Beträge der komplexen Zahlen aller Wellen darstellt. Das Amplitudenbild bildet also die reellen Anteile der Wellen ab. Auf der anderen Seite besteht die Möglichkeit der Erzeugung eines 18 Phasenbildes. Das Phasenbild stellt jedoch die Winkel der Wellen zur reellen Achse dar und bildet demnach den imaginären Anteil der Wellen ab. Meist wird jedoch nur eine Amplitudenbild erzeugt, weil es das oftmals aussagekräftigere Spektrum des Bildes beschreibt. Bei der Erzeugung des Amplitudenbilds wird der Ursprung in den Mittelpunkt verschoben, damit die niedrigen Frequenzen in der Bildmitte zu sehen sind. Bild 31 Darstellung der Amplitude (Original und Amplitudenbild Oben, dezentrales und zentrales logarithmiertes Amplitudenbild Unten) Bild 32 Amplitudenbilder verschiedener Objekte 19 Bei räumlich separierbaren Transformation wird die Abbildung zunächst örtlich zerlegt und anschließend für jeden Ort ein Phasen oder Amplitudenbild nach dem zuvor beschrieben Vorgehen erzeugt. Für die meisten Bilder sinken die Werte der Amplitude mit steigender Frequenz sehr schnell ab. Der Abfall ist meist sogar so stark, dass bei der Abtastung der reellen Amplitudenwerte der Wellen die meisten Pixel auf Null abgebildet werden, weshalb meistens eine logarithmierte Darstellung des Amplitudenbilds bevorzugt wird [31]. Der relativ schnelle und starke Abfall der Amplituden bei steigender Frequenz bedeutet, dass in den meisten Bildern ein erhebliches Kompressionspotential steckt. Da niedrige Amplituden eine geringe Variation der Grauwerte im Ortsbereich bedeuten, ist der Informationsverlust durch Streichung der Wellen mit geringen Amplituden kaum wahrnehmbar. Die Wellen enthalten jedoch nicht nur Informationen über die Grauwertvariationen der Objekte einer Szene, sondern auch über ihre Lage im Ortsraum. Die Verschiebung eines Objektes im Ortsraum entspricht beispielsweise einer Phasenverschiebung im Frequenzraum bei gleich bleibender Amplitude [33]. Bild 33 Translationsbewegung Die Rotation eines Objektes hingegen entspricht einer Drehung der Amplitude ohne eine Phaseverschiebung zu bewirken [34]. Aus der Feststellung das niedrige Frequenzen meist eine hohe Amplitude besitzen und umgekehrt lässt sich die allgemeine Aussage ableiten, dass die hochfrequenten Anteile des Bildes meistens einen geringeren Informationsgehalt der Szene transportieren. 20 Bild 34 Rotationsbewegung 6.3 Fast Fourier Transformation Nahezu jede Bildverarbeitungsbibliothek enthält eine schnell berechende Variante der Fourier-Transformation, die sogenannte Fast FourierTransformation, durch die der Berechungsaufwand der Transformation von O(N^4) auf O(N²logN) abgesenkt wird. Da die Koeffizienten der aufwändigeren Kosinustransformation aus denen der Fouriertransformation berechnet werden können wird diese in Regel auf die Fast Fourier Transfomation mit anschließender Berechnung der Koeffizienten zurück geführt. 6.4 Faltungen Faltungsoperatoren sind eine spezielle Gruppe der linearen Operatoren. Sie sind Verschiebungsinvariant, das bedeutet ihr Einfluss ist unabhängig vom Ort ihres Einsatzes. Viele Einflüsse der Bildaufnahme sind ebenfalls unabhängig vom Ort und lassen sie deshalb durch einen solchen Operator beschreiben. Zum Beispiel sind die meisten Rauscheinflüsse Orts unabhängig. Der Einsatz eines Faltungsoperators zur Beschreibung solcher Einflüsse ist besonders attraktiv auf Grund der Tatsache, dass er selbst dann bestimmt werden kann wenn die Ursache der Einflüsse unbekannt ist. Neben Linerarität und Verschiebungsinvarianz sind Faltungen assoziativ und kommutativ. Bei der Anwendung mehrere Faltungen auf ein Bild ermöglicht die Assoziativitätseigenschaft eine effiziente Ausführung. Die unterschiedlichen Operatoren können zu einem Operator zusammen gefasst werden und auf das Bild angewendet werden. Dies ist ein erheblicher Vorteil, weil mit solchen Operatoren in der Regel nicht nur Einzelbilder gefiltert, sondern ganze Aufnahmereihen bearbeitet werden sollen. ( g f )(m, n) g (i, j) * f (i m, j n) i j Berechnung einer Faltung Wird eine Faltung im Ortsraum ausgeführt, so ist der Aufwand bei einem K*K großen Faltungskern pro Bildpunkt O(K²). Der Gesamtaufwand ist also O(K²*N²). Durch einige mathematische Umformungen lässt sich für ein und höher dimensionale Funktionen zeigen, dass eine Faltung im 21 Ortsraum einer Multiplikation im Frequenzraum entspricht. Unter Verwendung der Fast Fourierransformation ist der Aufwand für Hin- und Rücktransformation jeweils O( N 2 log 2 N ) und der Aufwand für die Multiplikation O(N²). Daraus ergibt sich ein Gesamtaufwand von O( N 2 log 2 N ) . Eine Faltung ist also für log 2 N < K² im Frequenzraum effizienter durchführbar. Da sich die Fouriertransformation und ihre inverse Transformation nur um ein Vorzeichen unterscheiden, lässt sich umgekehrt beweisen, dass eine Faltung im Frequenzraum einer Multiplikation im Ortsraum entspricht. 6.5 Korrelationen Eine Korrelation ist einer Faltung sehr ähnlich, aber unterscheidet sich jedoch in ihrem Anwendungsbereich. Während Faltungen dazu eingesetzt werden Einflüsse auf das Bild rückgängig zumachen werden Korrelationen dazu genutzt Ähnlichkeiten zwischen Bilder zu beschreiben. Die Ähnlichkeit zwischen zwei Bildern lässt sich durch ihre Kovarianz beschreiben. f ,g 1 MN N 1 M 1 ( f (m, n) f (m, n))( g (m, n) g (m, n)) n 0 m 0 Kovarianz zweier Bilder F und G repräsentieren die Mittelwerte der beiden Abbildungen. Da die Kovarianz sehr stark vom Verhältnis der beiden Varianzen abhängt ist sie kein perfektes Maß für die Beschreibung der Ähnlichkeit. Es empfiehlt sich eine Normalisierung der Kovarianz mit den beiden Varianzen der Abbildungen, wodurch sich der sogenannte Korrelationskoeffizient ergibt. CC f , g f ,g 2f * g2 Korrelationskoeffizient Werte zwischen 0 und 1 bzw. zwischen 0 und -1 geben unterschiedliche Gerade von Streuung der Grauwertkombinationen in der gemeinsamen Häufigkeitsverteilung an. Der Wert 0 wird angenommen, wenn es keine Ähnlichkeiten zwischen den Bildern gibt und 1 wenn das eine Bild eindeutig im Anderen wieder gefunden wird. Deshalb können Korrelationen sehr gut für ein Template Matching eingesetzt werden. Die gesuchte Struktur wird als eine Vorlage implementiert und mit allen Positionen des Bildes korreliert. Anhand der Größe der errechneten Korrelationskoeffizienten lässt sich die Ähnlichkeit an der Stelle des Bildes mit Vorlage beschreiben. Ein möglichst großer Korrelationskoeffizient bedeutet hierbei eine möglichst große Übereinstimmung. Allerdings ist diese Berechnung sehr aufwendig, weil für jede Position der Vorlage die Varianzen und die Kovarianz berechnet werden müssen. Dieser Vorgang lässt sich unter der Annahme, dass der Mittelwert der Vorlage Null ist und die Vorlage der Größe des Bildes entspricht stark vereinfachen. Dieses Verfahren wird als Kreuzkorrelation bezeichnet. 22 CC f , g (m, n) f , g (m, n) 1 2 2 2 f * g f * g2 M 1 N 1 ( f (i m, j m) f )(m(i, j) m ) i 0 j 0 1 * g2 M 1 N 1 1 * g2 M 1 N 1 2 f 2 f ( f (i m, j n) f )m(i, j ) i 0 j 0 f (i m, j n)m(i, j ) i 0 j 0 Überführung der Korrelation in die Kreuzkorrelation M 1 N 1 ( f g )(m, n) f (i m, j n)m(i, j ) i 0 j 0 Berechnung der Kreuzkorrelation Da die Kreuzkorrelation der Faltung bis auf das Vorzeichen entspricht gelten die gemachten Aussagen über den Berechnungsaufwand der Faltung in Orts- und Frequenzraum äquivalent. Eine Faltung entspricht einer Korrelation mit einem um 180° gedrehten Kern. Bild 35 Korrelation 6.6 Filter 6.6.1 Durchschnittsfilter Bild 36 Faltung Der Durchschnittsfilter bewegt seine Filtermaske über das gesamte Bild und berechnet dabei für jede Position der Maske den Durchschnitt der unterliegenden Pixel neu und ersetzt den Pixel unterhalb der Filtermitte durch diesen[38]. Dadurch werden die Unterschiede zwischen nahegelegenen Pixel entfernt und das Bild erscheint geglättet. Ein solcher Filter kann zum verwaschen von Kanteninformationen führen[40]. Dies liegt daran, dass ein Durchschnittsfilter meistens als ein rechteckiger gewichteter Faltkern implementiert wird. Eine Filterung entspricht also einer Faltung im Ortsraum. Da der Rechteckfilter aber im Frequenzraum zu einem Kardinalsinus transformiert [37] verrauschen die Schwingungsanteile des Kardinalsinus Teile des Bildes. 23 1 / 9 1 / 9 1 / 9 1 / 9 1 / 9 1 / 9 1 / 9 1 / 9 1 / 9 Faltungskern Bild 37 Transformation eines Rechtfilters in den Frequenzbereich Bild 38 Anwendung eines 3*3 Durchschnittsfilter 24 Bild 39 Original 6.6.2 Bild 40 Gefiltert Gaußfilter G 1 2 2 e ( x2 y2 ) 2 2 Die Gaußglocke ist symmetrisch und gewichtet nahe gelegene Pixel stärker als weit entfernte. Die Gaußglocke ergibt somit eine kreisförmige nach außen dunkler werdende Abbildung [42]. Gaußglocke Bild 41 3D Graph Bild 42 Abbildung 25 Der Auswirkungen des Gaußfilters können über seine Varianz und die Größe der Filtermaske gesteuert werden. Wird beispielsweise die Varianz erhöht, so spreizt sich die Glocke auf und es fließen mehr Pixel in die Gewichtung mit ein. Bild 43 Gaußglocken mit unterschiedlichen Varianzen Erhöht sich aber die Varianz und verkleinert sich der Kern, dann werden alle Pixel relativ stark gewichtet und der Filter hat kaum eine Wirkung. Bild 44 Gaußglocken mit unterschiedlichen Kernen Eine Daumregel besagt, dass die Breite des Kerns mindestens dem dreifachen der Varianz entsprechen sollte. Da die Gaußglocke bei einer 26 Transformation in den Frequenzbereich wieder zu einer Gaußglocke transformiert verrauscht sie im Gegensatz zu anderen Filtern keine Verrauschung des Signals und ist deshalb die konventionelle Wahl für eine Tiefpassfilterung. 6.6.3 Medianfilter Im Gegensatz zum Durchschnitts- und Gaußfilter ist der Median ein nicht linearer Filter. Wie schon bei der Erklärung der verschiedenen Rauscheinflüsse erwähnt eignet sich der Medianfilter sehr gut zum filtern von zufällig verteiltem Rauschen. Sein großer Vorteil gegenüber dem Durchschnittsfilter ist, dass er die Kanten des Bildes nicht verwischt [38]. Ein Medianfilter muss lediglich einen guten Sortieralgorithmus implementieren um möglichst effizient zu arbeiten. Bild 45 Filterverhalten an einer Kanter 27 7 Kanten und Ableitungen Zunächst wird das Bild partiell Differenziert. Dazu wird das Bild als eine zweidimensionale Funktion mit diskretem Werteberreich und eingeschränkten Definitionsbereich betrachtet. Bild 46 Tiger Bild 47 Ableitung X Bild 48 Ableitung Y Der Gradient zeigt dann immer in die Richtung des steilsten Intensitätsanstieges [49]. Bild 49 Gradienten Beispiele verschiedener Intensitätsverläufe Die Richtung des Gradient bzw. der Kante wird als Phasenverschiebung zwischen den partiellen Ableitungen ausgedrückt. 28 Die Kantenstärke des Bildes ergibt aus der Norm der partiellen Ableitungen [50]. Bild 50 Kantenstärke 8 Anwendungen im Institut für Lasertechnik 8.1 Geschwindigkeitsmessung mittels Kreuzkorrelation Bei der Geschwindigkeitsanalyse geht es darum die Bearbeitungsgeschwindigkeit des Prozesses aus den laufenden Aufnahmen der Kamera zu bestimmen. Über die Aufnahmerate der Kamera und den gemessenen Abstandsinformationen der Bilder kann die Bearbeitungsgeschwindigkeit errechnet werden. Die Abstände werden mittels einer Kreuzkorrelation gemessen. Damit dieses Verfahren gleichbleibend gut funktioniert muss dafür gesorgt werden, dass sich die aufgenommenen Bilder während des Prozesses möglichst ähnlich sind. Mittels Kreuzkorrelation wird nun für einen kleinen Bildausschnitt für jede Position innerhalb eines größeren Bildausschnittes oder dem Gesamtbild der Korrelationskoeffizient bestimmt. Die Position des größten errechneten Korrelationskoeffizienten kennzeichnet die Lage des kleinen Bildausschnitts innerhalb des Suchbereiches. Der zurückgelegte Weg des kleinen Bildausschnitts errechnet sich nun als Differenz seiner Lage im aktuellen Bild zum vorherigen. Da diese Abstände natürlich in Pixeln gemessen werden muss zusätzlich noch der Vergrößerungsmaßstab des Aufnahmesystems bekannt sein um den reell zurück gelegten Weg bestimmten zu können. 8.2 Nahtfolgeerkennung mittels Konturerkennung Bei der Nahtfolgeerkennung geht es darum den Bearbeitungspunkt des Lasers zentriert zur Naht auszurichten und ihn während des gesamten Prozesses in dieser Position zu führen. Auf Grund von thermischen Effekten des Strahlenführungssystems oder Schwingungen des Bearbeitungskopfes der Anlage kann der Spot des Lasers während des Prozesses von der Naht abwandern. Um einen solchen unerwünschten Effekt regulieren zu können ist es nötig den aktuellen Abstand zwischen Laserspot und Naht genau zu messen. Hierzu werden die Bilder des Beobachtungssystems zunächst nach den Reflektionen der Blechkanten segmentiert um die Region der Naht zu erhalten. Nun wird das Originalbild erneut segmentiert um die Region des Laserspots zu erhalten und die Schwerpunkte beider Regionen berechnet. Der Abstand des Laserspots zur Naht entspricht dem Abstand der Schwerpunkte beider Regionen. Da dieser Abstand jedoch in Pixeln gemessen wird ist es nötig den Vergrößerungsmaßstab des Aufnahmesystems zu kennen um den reellen Abstand berechnen zu können. Da es möglich ist Optiken mit einer gewünschten Vergrößerung zu fertigen können so prinzipiell beliebig kleine Abstände sauber erfasst werden. Ein 29 größeres Problem zur Entwicklung eines zuverlässigen Verfahrens stellt jedoch das unterschiedliche Reflektionsverhalten der verschiedenen Bearbeitungsmaterialien dar. Da jedes Metall das Licht anders reflektiert kann nicht mit einem manuell festgelegten Schwellwert gearbeitet werden, sondern es muss für jedes Material ein neuer Schwellwert berechnet werden. Dieser Schwellwert passt sich so an die aktuellen Reflektionseigenschaften des Materials an. Außerdem ist es wichtig gleichbleibende Reflektionen entlang der Blechkanten zu garantieren, damit die Region der Naht sauber erfasst werden kann. Hierzu müssen zusätzliche Fremdbeleuchtungen, die in einem festen Winkeln zur Naht stehen und somit eine gleichbleibende Beleuchtungssituation garantieren eingesetzt werden. 8.3 Referenzfilmvergleich mittels Kreuzkorrelation Beim Referenzfilmvergleich geht es darum die Qualität bzw. den Zustand eines beobachteten Prozess durch Vergleich mit einem möglichst idealen Referenzfilm zu beurteilen. Ein solcher Referenzfilm muss zunächst experimentell aus einer Versuchreihe bestimmt werden. Ziel der Versuchreihe ist es den Prozess in Bezug auf das gewünschte Ergebnis des Vergleiches möglichst gut abzubilden. Ideal wäre es, wenn die Einzelbilder des Referenzfilmes Mittelwerte von beispielweise zehn guten Bildern der Versuchreihe wären, damit kleine Fluktuationen der Aufnahme nicht so stark ins Beurteilungsergebnis mit einfließen. Nach der Erstellung eines geeigneten Referenzfilm kann mit seiner Hilfe ein Prozess analysiert werden. Hierzu wird für jedes Bild des Prozess der Korrelationskoeffizient mit dem entsprechenden Bild des Referenzfilms berechnet. Anhand der Größe des Koeffizienten wird die Übereinstimmung des Prozesses mit dem Film beurteilt. Damit sich der Referenzfilm auch für den gleichen Prozess bei anderer Ortsauflösung eignet, empfiehlt es sich den Referenzfilm in einem skalierbaren Format zu speichern. Dadurch wird verhindert, dass für jede mögliche Ortsauflösung ein eigener Referenzfilm erstellt werden muss. 8.4 Zählungen von Pulververteilungen Bei diesem Prozess geht es darum möglichst gleiche Pulvermengen durch kreisförmig angeordnete Düsen in die Prozesszone einzubringen. Hierzu werden die Häufigkeitsverteilungen von ausgestoßen Pulverteilchen am Ausgang jeder Düse erfasst und verglichen. Zur Zählung der Pulverteilchen wird das Bild in N Dreiecke zentriert zu den N Düsen zerlegt. Anschließend wird das Bild nach den Helligkeiten der Pulverteilchen segmentiert und diese mittels Region Labbelling abgezählt. Die Menge der Teilchen unter einem bestimmten Dreieck entspricht der Anzahl von dieser Düse eingebrachten Pulvermenge. Da diese in der Regel relativ hoch ist kann die Häufigkeitsverteilung der Düse über eine Gaußverteilung genährt werden. Anhand der Varianzen und Mittelwerte der unterschiedlichen Verteilungen an den Düsen lässt sich die Gleichmäßigkeit der eingebrachten Pulvermenge einfach kontrollieren. 8.5 Intensitätsverteilungen beim Laserbohren Laserbohren ist ein sehr schnelles und sauberes Bohrverfahren. Zur Prüfung ob ein Laser eine Bohrung erfolgreich abgeschlossen hat wird von der Annahme ausgegangen, dass solange sich noch Materialrückstände im Bohrloch befinden große Anteile der Laserstrahlung zurück reflektiert werden. Diese reflektierte Strahlung wird während der Bohrung über eine Kamera aufgezeichnet. Die Wellenlänge des Bearbeitungslasers sollte dazu wenn möglich oberhalb des Empfindlichkeitsbereiches der Kamera liegen, weil dann die reflektierte Laserstrahlung in jedem Fall als weiße Pixel im oberen Intensitätsbereich abgebildet wird. Dieser Effekt kann natürlich auch in umgekehrter Weise ausgenutzt werden. Nun werden die prozentualen Histogramme der Bilder betrachtet und geguckt ob der Anteil des oberen Intensitätsbereiches unter eine experimentell festgestellte Schranke abfällt. In einem solchen Fall ist kein Material mehr im Bohrloch zu finden 30 und es kann davon ausgegangen werden das der Laser das Material vollständig durchbrochen hat. Es ist nötig die prozentuale Schrank zunächst experimentell zu bestimmten, weil sie natürlich stark von der restlichen Beleuchtungssituation der Anlage abhängt. Die Schranke prozentual anstatt absolut zu messen hat den Vorteil, dass sie auf Aufnahmen verschiedener Auflösungen gleichbleibend gut angewendet werden kann, sofern sich die Beleuchtungssituation durch die höhere Auflösung nicht verändern. 9 Zusammenfassung In dieser Seminararbeit werden Algorithmen zur Bearbeitung von monochromen Bildern vorgestellt und einige Anwendungen aus dem Bereich der Lasertechnik präsentiert. Die Arbeitsweise eines optischen Aufnahmesystems wird am Beispiel eines Halbleiter Bildsensors erklärt und diverse Störeinflüsse vorgestellt. Außerdem wird die Funktionsweise und Effizienz von transformierten Darstellungen im Frequenzraum ausführlich erläutert und kurz auf die Bedeutung von Ableitungen für die Kantererkennung eingegangen. Literaturverzeichnis Links http://de.wikipedia.org/wiki/Schwellwertverfahren http://en.wikipedia.org/wiki/Thresholding_%28image_processing%29 Präsentationen & Papers Prof. Dr. Bastian Leibe, Computer Vision, Aachen 2008 Bücher Klaus D. Tönnies: Grundlagen der Bildverarbeitung, Pearson Studium, Berlin 2005, ISBN 3-8273-7155-4 Bernd Jähne: Digitale Bildverarbeitung. 6., überarbeitete und erweiterte Auflage. Springer, Berlin 2002, ISBN 3-540-24999-0 31 Gary Bradski & Adrian Kaehler: Learning OpenCV: Computer Vision with the OpenCV Libary, O’Reilly , 2008, ISBN 978-0-596-51613-0 Rafael C. Gonzales, Richard E. Woods: Digital Image Processing. Prentice Hall, New Jersey 2002, ISBN 0-201-18075-8 32