Abbildung 2
Werbung

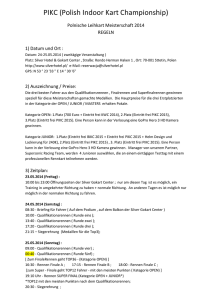
Mechanische und energetische Aspekte der menschlichen Lokomotion Knüsel Heidi, Literaturarbeit in der Biomechanik, 2003 1. Einleitung In der Tierwelt können unterschiedliche Lokomotionsformen beobachtet werden. Fische gleiten im Wasser, Vögel schweben in der Luft und auf dem Land lebende Säugetiere benützen Beine, um sich in der Umwelt zu bewegen. Eine vierbeinige wie auch zweibeinige Lokomotionsform ist in dem Sinne vorteilhaft, da sich das Lebewesen auf unterschiedlichst geformten Terrain fortbewegen kann. Der Nachteil liegt im relativ hohen Energieverbrauch, da die Geschwindigkeit des Fusses bei jedem Schritt auf null abfällt (Saibene und Minetti 2003). Der Mensch bedient sich zwei verschiedenen Lokomotionsformen. Bei niedrigen Geschwindigkeiten geht er, bei hohen Geschwindigkeiten rennt er. Beim Gehen befindet sich zu jedem Zeitpunkt mindestens ein Fuss am Boden, währenddem Rennen durch eine Flugphase charakterisiert ist, bei welcher beide Füsse den Kontakt zum Boden verlieren. Ziel dieser Übersichtsarbeit ist es, die zwei zentralen Fortbewegungsarten gehen und rennen mechanisch und energetisch durch Zuhilfenahme von einfachen Modellen und experimentellen Daten zu beschreiben. Es wird auf die Übergangsgeschwindigkeit zwischen dem Gehen und Rennen eingegangen und diskutiert, welche Faktoren diese Geschwindigkeit beeinflussen. Aspekte der mechanischen Betrachtungsweise spielen eine zentrale Rolle zur Beschreibung der energetischen Kosten und somit bei der Wahl der Gangart. Ziel der menschlichen Lokomotion ist es, bei einer gegebenen Geschwindigkeit die Gangart so zu wählen, dass die metabolischen Kosten minimiert werden (Minetti und Alexander 1997). 1 2. Literaturzusammenfassung 2.1 Die menschliche Lokomotion Das Ziel jeglicher Lokomotion ist die Fortbewegung im Raum, wodurch der Körperschwerpunkt (KSP) und die Gliedmassen Beschleunigungen ausgesetzt sind. Diese Beschleunigungen werden durch Muskelkräfte erzeugt. Der aktive Bewegungsapparat generiert demzufolge die notwendige Kraft, um erstens die eigene Masse zu tragen und um zweitens diese Masse im Raum zu bewegen (in Enoka 2002). Die Gangarten gehen und rennen können durch zwei wichtige Grössen unterschieden werden (in Enoka 2002): Durch den Duty-Faktor1 oder durch die Form der vertikalen Komponente der Bodenreaktionskraft. Beim Gehen beträgt der Duty-Faktor ungefähr 0.6, so dass die Standphase in einem Gangzyklus eines Beines 60%, die Schwungphase desselben Beines 40% beträgt. Beim Rennen beträgt der Duty-Faktor ungefähr 30%. Die relative und absolute Standphase ist beim Rennen somit deutlich kürzer als beim Gehen (in Enoka 2002). Die vertikale Komponente der Bodenreaktionskraft unterscheidet sich durch eine zweigipflige Form beim Gehen und eine eingipflige Form beim Rennen. 2.2 Mechanische Modelle vom Gehen und Rennen Gehen wird klassisch durch das Inverse-Pendel Modell beschrieben (Margaria 1976). Als Vereinfachung zur Realität wird bei diesem Modell das Standbein steif gehalten, wodurch das Kniegelenk vollständig gestreckt bleibt. Die KSP-Bewegung folgt einem Kreisbogen, währenddem das Bein um das Fussgelenk rotiert (Abbildung 1). Abbildung 1 Das Inverse-Pendel Modell des Gehens basiert auf der Annahme, dass das Standbein mit der Beinlänge gestreckt bleibt. Der KSP bewegt sich mit einer Geschwindigkeit v auf dem Kreisbogen und erfährt eine totale Beschleunigung a, welche ins Kreiszentrum (zum Fuss) hinein zeigt. Die maximale Gehgeschwindigkeit kann an diesem Modell leicht berechnet werden (in Enoka 2002): Die Zentripetalkraft darf nicht grösser als die Gewichtskraft sein, damit 1 Der Duty-Faktor (McMahon 1984) ist definiert als die Zeit eines ganzen Gangzyklus, bei welchem ein Fuss mit dem Boden in Kontakt steht. Die Länge des Gangzyklus ist durch die Distanz zwischen zwei Fersenauftritten desselben Fusses bestimmt. 2 der Fuss mit dem Boden in Kontakt bleibt. Folgende Gleichung kann dadurch aufgestellt werden: mv 2 mg l v gl Daraus folgt: Durch Division dieser Kräfte erhält man die dimensionslose Froude Nummer (Kram et al. 1997): FroudeNummer v2 gl Bei einer Froude Nummer grösser als 1 ist Gehen im dynamischen und kinematischen Sinn nicht mehr möglich. Für eine Beinlänge von 0.9 m berechnet sich eine maximale Gehgeschwindigkeit von ~3 m/s. Ausserdem wird durch obige Gleichung ersichtlich, weshalb Erwachsene mit langen Beinen schneller gehen können als Kinder mit kurzen Beinen. Das Inverse-Pendel Modell beschreibt das Gehen auf elementarer und funktioneller Ebene, ohne aber die Komplexität des Gehens vollständig zu erfassen. Bei genauerer Betrachtung des menschlichen Gehens können folgende wichtige Punkte hervorgehoben werden: Gehen ist durch eine Phase im Gangzyklus gekennzeichnet, bei welcher beide Beine den Boden berühren. Der Kreisbogen, auf dem der KSP verläuft, wird in Realität durch eine Rotation und seitliche Abkippung des Beckens wie auch durch eine leichte Biegung des Standbeines abgeflacht. Um den Verlauf des Körperschwerpunktes am Übergang zur Schwungphase zu glätten, kann im Fussgelenk eine Plantarflexion beobachtet werden, welche vor allem am Ende der Standphase erfolgt. Beim Gehen wird der KSP immer in Richtung des Standbeines bewegt, wodurch das Becken eine seitliche Verschiebung in der transversalen Ebene erfährt. Diese Bewegung erfolgt mit der halben Frequenz der KSP-Bewegung in der sagitalen Ebene (McMahon 1984). Ferner ist zu beachten, dass das Bein im InversePendel Modell masselos ist. Die Körpermasse ist im Schwerpunkt zentriert. In Realität hat das Bein aber eine Masse, welche sich über die ganze Beinlänge verteilt. Annähernd kann das Bein als eine Kette von drei Segmenten verstanden werden, welche je eine Teilmasse und einen Teilkörperschwerpunkt besitzen. Werden einige oben erwähnter Faktoren in die Modellierung mit einbezogen, so erhaltet man komplexere Modelle, auf welche hier nicht weiter eingegangen wird. 3 Rennen und Hüpfen sind Lokomotionsformen, welche durch dasselbe Modell beschrieben werden können. Man kann sich einen springenden Ball vorstellen, der zurückspringt, sobald man ihn auf den Boden geworfen hat. Diese Eigenschaft kann durch das Masse-Feder Modell beschrieben werden (Blickhan 1989). Das Modell besteht aus einer Masse, welche den KSP repräsentiert und einer masselosen Feder (Abbildung 2). Abbildung 2 Das Masse-Feder Modell besteht aus der Masse des Körperschwerpunktes (KSP), einer masselosen Feder mit der Federkonstanten k, dem Anstellwinkel αo und der vertikalen Körperschwerpunktsverschiebung y. Während der ersten Hälfte der Standphase wird die Feder zusammengepresst, wodurch elastische Energie gespeichert wird. Diese Energie wird in der zweiten Hälfte der Standphase freigesetzt. Dadurch wird der KSP nach oben beschleunigt. Die Beinsteifigkeit beim Rennen, im Modell durch die Federkonstante dargestellt, kann durch die Muskelaktivität und die Beingeometrie beim Fersenauftritt verändert werden. Die Grösse der Beinsteifigkeit bestimmt die Dauer der Standphase und die vertikale Körperschwerpunktsverschiebung während der Standphase. Diese Variabilität ermöglicht es, bei einer bestimmten Geschwindigkeit verschiedene Schrittfrequenzen und Schrittlängen zu benutzen (in Enoka 2002). Die horizontale Geschwindigkeit ist durch das Produkt der Länge eines Gangzyklus mal die Schrittfrequenz2 gegeben. Die Beinsteifigkeit kann durch Anwendung von Gesetzen der Geometrie, der Trigonometrie und durch die Verwendung von experimentellen Daten einfach berechnet werden (in Enoka 2002): k Bein Fz (max) l mit Fz(max) als die grösste Amplitude der vertikalen Komponente der Bodenreaktionskraft und l als die Längenveränderung des Beines vom Fersenauftritt bis zur Mitte der Standphase. Die Stabilität3 des Masse-Feder Modells kann erhöht werden, indem der Anstellwinkel αo, die Beinsteifigkeit k und die Renngeschwindigkeit aneinander angepasst werden (Seyfarth et al. 2002). Wird die Beinsteifigkeit zum Beispiel zu hoch gewählt, so schaukelt sich das System auf. Wird sie andererseits zu niedrig gewählt, so fällt das 2 Die Schrittfrequenz ist in diesem Fall auf die Frequenz eines Beines bezogen. Die Stabilität des Systems wurde durch die Anzahl Schritte, welche das Modell ausführen kann, bestimmt. 3 4 Masse-Feder Modell hin. Die Stabilität des Modells kann ferner erhöht werden, indem vor dem Fersenauftritt das Schwungbein nach unten gedreht wird (Seyfarth et al. 2003). 2.3 Energetische Betrachtungen (Saibene und Minetti 2003) Bezüglich des Körperschwerpunktes können drei fundamentale Energien unterschieden werden: Potentielle Energie (PE, mgh), kinetische Energie (KE, 0.5mv2) und elastische Energie (EL), wobei letztere vor allem beim Rennen zu beachten gilt. Durch Messung der Bodenreaktionskraft können PE und KE mittels Integration berechnet werden. Die Energie in vertikaler Richtung setzt sich aus PE und KE zusammen: Ev = mgh + 0.5mvy2, mit vy als die vertikale Komponente der Geschwindigkeit v. Die Energie in horizontaler Richtung (Eh) ist nur durch KE bestimmt: Eh = 0.5mvx2, mit vx als die horizontale Komponente der Geschwindigkeit. Bildet man die Summe von Ev und Eh, so erhält man die totale Energie (TE) bezüglich des Körperschwerpunktes: TE PE KE Beim Gehen kommen Ev und Eh in entgegengesetzter Phase vor (Abbildung 3, nach Cavagna et al. 1976): Ev ist maximal ungefähr in der Mitte der Schwungphase, Eh in der Mitte der beidbeinigen Stützphase. Addiert man diese beiden Energien wie oben erwähnt zur totalen Energie zusammen, so stellt man fest, dass beim Gehen TE nur kleinen Schwankungen unterworfen ist, da Ev und Eh in entgegengesetzter Phase vorkommen. Das heisst, dass während dem Gehen die vertikale Energie Ev zu einem grossen Teil in kinetische Energie Eh umgewandelt wird. Abbildung 3 Schematische Darstellung der Energieschwankungen beim Gehen: Der breite Pfeil repräsentiert den rechten, der dünne Pfeil den linken Fuss. TD steht für Touch-Down (Fersenauftritt), TO für Take-Off (Abstoss), Ev und Eh für die Summe der Energien bezüglich der vertikalen, respektive der horizontalen Richtung und TE für die Summe von Ev und Eh. Im Idealfall des Inversen-Pendel Modells stimmen Form und Amplitude von Ev und Eh genau überein – kommen aber in entgegengesetzter Phase vor. Das heisst, dass das 5 System ohne Zufuhr von externer Arbeit in Bewegung bleibt. Die prozentuale Erholung beträgt in diesem Fall 100% und ist wie folgt definiert: Erholung (%) 100 Wh Wv Wext Wh Wv mit W v 4 und W h als Summe der einzelnen Zunahmen von Ev, respektive Eh über einen Gangzyklus. W ext ist die Arbeit, die vom System tatsächlich erzeugt werden muss, damit das System in Bewegung bleibt und ist folgendermassen definiert: Wext TE Wext ist also die Arbeit, welche den KSP beschleunigt, um die Schwankungen von TE auszugleichen. Die Grösse von W ext hängt demzufolge vom Zusammenspiel zwischen PE, KE und EL ab. Es sollte darauf hingewiesen werden, dass neben der externen Arbeit auch eine interne Arbeit W int existiert, welche die Gliedmassen relativ zum KSP bewegt. Die totale Arbeit ist als die Summe der externen und internen Arbeit definiert. Da W ext eine verlässliche Schätzung für die mechanische Arbeit der Muskeln ist, wird zur Vereinfachung W int unterlassen. Die Muskeln müssen also die minimale mechanische Arbeit erzeugen, welche vom System gebraucht wird, damit die Energieschwankungen von TE ausgeglichen werden, wodurch die mechanischen und metabolischen Aspekte miteinander in Verbindung gebracht worden sind. Die metabolische Arbeit wird durch die Menge des Sauerstoffverbrauchs bestimmt. Gehen ist energetisch günstig, da Ev und Eh in entgegengesetzter Phase vorkommen und besitzt einen prozentualen Erholungswert von bis zu 60%! Im Gegensatz dazu findet man beim Rennen prozentuale Erholungswerte, die unter 5% liegen. Ein Energietransfer zwischen PE und KE beim Gehen findet beim Rennen somit nicht statt. Der Grund liegt bei Ev und Eh, welche diesmal in Phase vorkommen (Abbildung 4, nach Cavagna et al. 1976). Die vertikale Energie ist grossen Schwankungen unterworfen und hat ihre maximalen Werte in der Mitte der Schwungphase, weil sich der KSP zu diesem Zeitpunkt im höchsten Punkt der Flugparabel befindet. Die horizontale Energie ist nur kleinen Schwankungen unterworfen und hat ihre Maxima auch in der Mitte der Schwungphase. Daraus resultiert eine totale Energie, welche während eines Gangzyklus beim Rennen grossen Schwankungen ausgesetzt ist. 4 W steht für englisch work. 6 Abbildung 4 Schematische Darstellung der Energieschwankungen beim Rennen: Der breite Pfeil repräsentiert den rechten, der dünne Pfeil den linken Fuss. TD steht für Touch-Down (Fersenauftritt), TO für Take-Off (Abstoss), Ev und Eh für die Summe der Energien bezüglich der vertikalen, respektiven horizontalen Richtung und TE für die Summe von Ev und Eh. Im Masse-Feder Modell wird diese Energie in der ersten Hälfte der Standphase als Federenergie gespeichert, um die Energie in der zweiten Hälfte wieder abzugeben. In einem solch idealen System ist keine externe Arbeit nötig, um das Modell am Rennen zu halten. Dem ist aber nicht so in Realität. Wie schon erwähnt, beträgt die prozentuale Erholung beim Rennen weniger als 5%. Das heisst, dass zwischen PE und KE praktisch kein Energieaustausch stattfindet. Die TE-Schwankungen müssen somit durch Muskelarbeit kompensiert werden. Die Arbeit, die die Muskeln tatsächlich leisten müssen, fällt aber geringer aus als die berechnete externe Arbeit. Dem ist so, weil EL bei der Berechnung von W ext nicht berücksichtigt werden kann. Es scheint, dass die Minimierung der metabolischen Kosten (Emetab) die Wahl der Gangart bestimmt (Minetti und Alexander 1997) und nicht wie früher gedacht die mechanische Arbeit der Muskeln. Dies deshalb, weil metabolische Energie bei jeder Muskelaktivierung gebraucht wird, egal ob sich der Muskel verkürzt oder nicht, ob der Muskel Arbeit leistet oder nicht (Minetti und Alexander 1997). Um die Lokomotion bei verschiedenen Tierarten zu beschreiben, wurde der Begriff Transportkosten eingeführt und ist wie folgt definiert: C E metab E metab t v mg s mg mit Emetab/t als die metabolische Leistung, v als die Geschwindigkeit in horizontaler Richtung, mg als das Gewicht der Person und s als die zurückgelegte Strecke. C ist dimensionslos und kann als das Reziproke der Effizienz betrachtet werden. Wie Abbildung 5 verdeutlicht, fallen die Transportkosten für das Gehen bis zur Übergangsgeschwindigkeit im Vergleich zum Rennen tiefer aus. Beim Gehen kann die Transportkosten-Geschwindigkeits-Kurve als eine quadratische Funktion beschrieben 7 werden. Demzufolge existiert eine optimale Gehgeschwindigkeit (Froude Nummer von 0.25), bei welcher die Transportkosten am tiefsten gehalten werden. Bei der optimalen Gehgeschwindigkeit wird pro zurückgelegte Distanz am wenigsten metabolische Energie gebraucht, weshalb diese Geschwindigkeit am energetisch günstigsten ist. Beim Rennen sieht der Kurvenverlauf anders aus: Die Transportkosten sind näherungsweise unabhängig von der Geschwindigkeit gleich gross. Die notwendige chemische Energie steigt beim Rennen also linear mit der Geschwindigkeit an, so dass die verbrauchte Energie pro zurückgelegte Strecke konstant bleibt. Abbildung 5 Transportkosten als Geschwindigkeit: Funktion Vor der der idealen Übergangsgeschwindigkeit vo = 2.2 m/s (Minetti und Alexander 1997) ist Gehen (dünne Linie) energetisch günstiger als Rennen (breite Linie). Um die metabolischen Kosten bei einer bestimmten Geschwindigkeit möglichst gering zu halten, haben sich drei Faktoren als zentrale Stellgrössen herausgestellt (Saibene und Minetti 2003): Die Schrittfrequenz (und somit auch die Schrittlänge), der DutyFaktor und die Form der Bodenreaktionskraft. Die berechneten, optimalen Werte der drei Parameter entsprechen denjenigen Werten, welche wir beim Gehen und Rennen spontan wählen. Zum Beispiel wird bei einer zu hohen Schrittfrequenz die interne Arbeit zur Bewegung der Gliedmassen erhöht. 2.4 Beeinflussende Faktoren der Übergangsgeschwindigkeit Bei einer bestimmten horizontalen Geschwindigkeit wird die Gangart gewechselt. Wie beim Inversen-Pendel Modell erwähnt, bestimmen die Gravitations- und Zentripetalkraft die Übergangsgeschwindigkeit vom Gehen zum Rennen. Es konnte experimentell gezeigt werden, dass bei einer Froude Nummer von ~0.5 vom Gehen zum Rennen gewechselt wird (Saibene und Minetti 2003). Die Übergangsgeschwindigkeit ist demzufolge von der Beinlänge des Individuums wie von der Grösse der Fallbeschleunigung abhängig. Auf der Erde mit einer konstanten Fallbeschleunigung von 9.81 m/s2 wird die Übergangsgeschwindigkeit hauptsächlich durch die Beinlänge bestimmt (Enoka 2002): Je länger das Bein der Person, desto 8 höher die Übergangsgeschwindigkeit. Die ideale Übergangsgeschwindigkeit in Abbildung 5 liegt bei 2.2 m/s und kommt der Geschwindigkeit, welche bei Experimenten beobachtet werden kann (1.9 – 2.1 m/s), nahe (Minetti und Alexander 1997). Verlässt man die Erde und wiederholt dasselbe Experiment auf einem anderen Planeten, so ändert sich die Übergangsgeschwindigkeit um folgenden Faktor k: g k Erde g Planet 0.5 Ein Mensch auf dem Mond beginnt deshalb mit einer Geschwindigkeit von ~0.8 m/s zu rennen. Auf dem Mond ist es demzufolge einfacher zu rennen als zu gehen (Saibene und Minette 2003). 3. Konsequenzen Die menschliche Lokomotion ist ein enorm komplexes System und noch bei Weitem nicht vollständig verstanden. Während den Literaturrecherchen für diese Arbeit bin ich ab und zu auf Widersprüche gestossen oder habe festgestellt, dass zu scheinbar einfachen Fragestellungen noch keine klaren Antworten existieren. Mit einfachen Modellen versucht man die elementaren Funktionen zu beschreiben und zu verstehen. Kompliziertere Modelle werden gebraucht, wenn wichtige Parameter hinzugefügt werden. Modelle als Versuch zum besseren Verständnis der menschlichen Lokomotion haben ihre Berechtigung, doch sollte man sich bewusst sein, dass unser Körper als Ganzes mit der Umwelt interagiert und eine Modellierung immer eine vereinfachte Darstellung der Realität ist. Man kann sich selber denken, wie schwierig es ist, zum Beispiel neurologische Aspekte in die Modellierung mit einzubeziehen. Meines Erachtens wäre es erstrebenswert, ein Modell des menschlichen Körpers zu entwickeln, welches so einfach wie möglich, aber so komplex wie nötig ist. Die menschliche Lokomotion sollte weiterhin Gegenstand der Forschung sein, damit wichtige Erkenntnisse in der Rehabilitation, der Diagnose oder der Robotik angewendet werden können. 9 4. Literatur Buchkapitel McMahon T A. Neural Control of Locomotion, Mechanics of Locomotion. In: Muscles, Reflexes, and Locomotion. Princeton University Press, New Jersey, Chapter 7 and 8, 1984. Enoka R M. Running, Jumping, and Throwing. In: Neuromechanics of Human Movement. Human Kinetics, United States of America, p. 179-194, 2002. Artikel Blickhan R. The spring-mass model for running and hopping. J Biomech, 22(11/12), 1217-27, 1989. Cavagna G A, Thys H, Zamboni A. The sources of external work in level walking and running. J Physiol, 262(3), 639-57, 1976. Kram R, Domingo A, Ferris D P. Effect of reduced gravity on the preferred walk- run transition speed. J Exp Biol, 200, 821-26, 1997. Margaria R. Biomechanics and energetics of muscular exercise. Clarendon Press, Oxford, 1976. Minetti A E, Alexander R McN. A theory of metabolic costs for bipedal gaits. J theor Biol, 186, 467-476, 1997. Saibene F, Minetti A E. Biomechanical and physiological aspects of legged locomotion in humans. J Appl Physiol, 88, 297-316, 2003. Seyfarth A, Geyer H, Günther M, Blickhan R. A movement criterion for running. J Biomech, 35, 649-55, 2002. Seyfarth A, Geyer H, Herr H. Swing-leg retraction: A simple control model for stable running. J Exp Biol, in press. 10