EP 03 026 764.5 4204 005 EP/DE
Werbung

EP 03 026 764.5
4204 005 EP/DE
Dofasco, Inc.
Verfahren und Online-System zum Überwachen des
Stranggießmaschinen-Hochfahrvorgangs und zum Vorhersagen
von Angussdurchbrüchen
TECHNISCHES GEBIET
Die vorliegende Erfindung betrifft allgemein einen Stranggießprozess und insbesondere ein Verfahren und ein OnlineSystem
zum
vorgängen,
Überwachen
um
von
Stranggießmaschinen-Hochfahr-
Durchbruchereignisse
vorherzusagen.
Dieses
System erzeugt Alarme, um einen bevorstehenden Durchbruch
bei einem Gießmaschinen-Hochfahrvorgang anzugeben, und es
identifiziert
die
Prozessvariablen
als
die
wahrschein-
lichsten Grundursachen für den vorhergesagten Durchbruch,
so
dass
manuell
geeignete
von
Steuertätigkeiten
Bedienern
ausgeführt
automatisch
werden
können,
um
oder
die
Möglichkeit des Auftretens von Durchbrüchen zu verringern.
STAND DER TECHNIK
Das Stranggießen ist in der Stahlherstellungsindustrie der
Schlüsselprozess, durch den geschmolzener Stahl zu einem
halbfertigen Produkt in der Art eines Barrens, eines Blocks
oder einer Bramme verfestigt wird, um es anschließend in
der Warmbandstraße oder der
Dieser
Prozess
wird
durch
Fertigwalzstraße zu
eine
als
walzen.
Stranggießmaschine
bekannte wohlkonstruierte Gießmaschine erreicht.
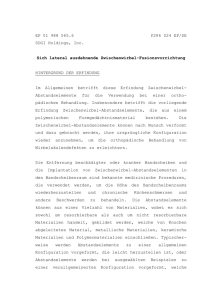
Figur 1 zeigt ein schematisches Diagramm einer Stranggieß-
- 2 -
maschine gemäß dem Stand der Technik, welche die folgenden
Schlüsselabschnitte
aufweist:
einen
Gießturm
20,
eine
Pfanne 22, einen Tundish 24 mit einer Stopperstange 26,
eine
eingetauchte
Eintrittsdüse
(SEN)
28,
eine
wasser-
gekühlte Kupferform 30, einen Walzenaufnahmeabschnitt mit
zusätzlichen Kühlkammern 32, eine Strecker-Rückzugseinheit
34 und eine Flammentrennereinrichtung 36.
Geschmolzener Stahl von einem elektrischen Ofen oder einem
einfachen Sauerstoffofen wird in eine Pfanne abgezweigt und
der Stranggießmaschine zugeführt. Die Pfanne wird durch den
Turm
20
in
die
Gießposition
oberhalb
des
Tundish
24
gebracht. Der Stahl wird in den Tundish 24 und dann durch
die SEN 28, die
zum Regeln der
Stahlflussrate
und zum
Bereitstellen einer genauen Steuerung des Stahlniveaus 38
in der Form verwendet wird, in die wassergekühlte Kupferform 30 gegossen. Wenn sich der geschmolzene Stahl bei
einer gesteuerten Rate die Form 30 hinab bewegt, verfestigt
sich die äußere Hülle des Stahls, so dass ein Stahlstrang
40 erzeugt wird. Nach dem Austreten aus der Form 30 tritt
der Strang 40 in einen Walzenaufnahmeabschnitt und eine
Kühlkammer ein, worin der sich verfestigende Strang mit
Wasser
besprüht
Sobald
der
wird,
Strang
um
die
vollständig
Verfestigung
verfestigt
zu
ist
fördern.
und
die
Strecker-Rückzugseinheit 34 durchlaufen hat, wird er in der
Trenneinheit 36 zu der erforderlichen Länge geschnitten.
Die wesentlichen
beim Betrieb
auftretenden Probleme bei
Stranggießprozessen beziehen sich auf das Erreichen eines
stabilen Betriebs nach dem Hochfahren bzw. Einleiten und
das
anschließende
Aufrechterhalten
geeigneter Hochfahrvorgang ist
der
Stabilität.
Ein
für das Erreichen dieses
- 3 -
Ziels
sehr
verwendet
entscheidend,
wird,
wobei
das
ein
richtige
Kaltstrang
geeignet
Ausgangsschmiermittel
verwendet wird und die geeignete anwendbare Sequenz des
rampenförmigen Erhöhens auf die Gießgeschwindigkeit während
des Hochfahrvorgangs eingesetzt wird.
Zum Einleiten eines Gießvorgangs wird der Unterteil der
Form durch einen Kaltstrang aus Stahl gedichtet, wodurch
verhindert
heraus
wird,
fließt.
dass
Der
geschmolzener
in
die
Form
Stahl
aus
gegossene
der
Form
Stahl
wird
teilweise verfestigt, wodurch ein Stahlstrang
mit einem
festen Außenmantel 42 und einem flüssigen Kern 44 erzeugt
wird.
Sobald
der
Stahlmantel
eine
ausreichende
Dicke
aufweist, zieht die Strecker-Rückzugseinheit den teilweise
verfestigten Strang zusammen mit dem Kaltstrang aus der
Form heraus. Der geschmolzene Stahl wird weiter in die Form
gegossen, um den herausgezogenen Stahl bei einer gleichen
Rate zu ersetzen. Wenn der Kaltstrangkopf, der nun an dem
gegossenen
verfestigten
Strang
angebracht
ist,
eine
bestimmte Position in der Herauszieheinheit erreicht, wird
er mechanisch getrennt und entfernt.
Ein wohlbekanntes Problem, das bei der Stranggießmaschine
auftritt,
besteht
darin,
dass
geschmolzener
Stahl
im
Strangmantel leicht reißt und ein Durchbruch hervorgerufen
wird,
so
dass
geschmolzener
Stahl
unterhalb
der
Form
herausläuft. Ein
Durchbruch kann entweder während eines
Hochfahrvorgangs
auftreten,
was
als
Angussdurchbruch
bekannt ist, oder er kann während des folgenden Laufzeitvorgangs auftreten, was als Laufzeitdurchbruch bekannt ist.
Für eine typische, vollständig betriebsfähige Stranggießmaschine treten etwa 25 % der gesamten Durchbrüche während
- 4 -
des
Hochfahrvorgangs
auf.
Diese
Durchbrüche
sind
eine
Hauptsorge in der Stahlherstellungsindustrie, weil sie die
Zuverlässigkeit
und
die
Wirksamkeit
des
Produktions-
prozesses verringern, infolge von Produktionsverzögerungen
und der Zerstörung von Geräten erhebliche Kosten hervorrufen
und
in
vielen
Sicherheitsrisiken
Fällen
Anlagenbediener
aussetzen.
Daher
erheblichen
können
durch
die
Fähigkeit zum Verhindern des Auftretens von Durchbrüchen
durch die Verwendung von technischem Expertenwissen und
analytischen
Verfahren
ausgezeichnete
Vorteile
für
den
Stranggießprozess bereitgestellt werden.
Wenngleich im Stand der Technik bereits einige Verfahren
und Systeme für das Feststellen und/oder Vorhersagen der
Laufzeit-Gussdurchbrüche
Angussdurchbrüchen
und
entwickelt
ihrer
wurden,
Verhinderung
wurde
sowohl
im
akademischen Bereich als auch in der Industrie bisher sehr
wenig Aufmerksamkeit geschenkt. Es ist dann wichtig, diese
Angussdurchbrüche
vorhersagen
zu
mit
einer
können,
so
ausreichenden
dass
sie
Vorlaufzeit
durch
Ergreifen
geeigneter Steuertätigkeiten vermieden werden können. Ein
Beispiel
dieser
Rampenprofil
der
Gießprozess
zu
Steuertätigkeiten
Gießgeschwindigkeit
verlangsamen
und
besteht
zu
mehr
darin,
ändern,
Zeit
um
für
das
den
die
Stahlverfestigung in der Form bereitzustellen.
Im Stand der Technik des Gebiets des Feststellens und/oder
des Vorhersagens von Durchbrüchen bei Stranggießprozessen
existieren zwei verschiedene Verfahrenstypen. Einer ist das
Mustervergleichsverfahren, beispielsweise das wohlbekannte
Verfahren
zum
Feststellen
stecken
gebliebener
Blöcke,
welches umfassende Regeln zum Charakterisieren der Muster
- 5 -
anhand der Formtemperaturen vor dem Auftreten eines Durchbruchs auf der Grundlage früherer Erfahrungen mit Gießvorgängen entwickelt. Falls solche Muster beim aktuellen
Gießvorgang erkannt wurden, ist
es sehr
wahrscheinlich,
dass ein Durchbruch auftreten wird. Die relevanten Systeme,
die auf diesem Verfahrenstyp beruhen, wurden von Yamamoto
u.a. in US-A-4 556 099, von Blazek u.a. in US-A-5 020 585,
von Nakamura u.a. in US-A-5 548 520 und von Adamy in US-A5 904 202 beschrieben. Das andere Verfahren ist das von
Vaculik u.a. in US-A-6 564 119 beschriebene multivariate
statistische
Verfahren,
analyse-Modell
erweiterten
bei
dem
(PCA-Modell)
Satzes
von
Standard-Formtemperaturen
ein
unter
HauptkomponentenVerwendung
Prozessmessungen
gebildet
wird,
eines
jenseits
um
den
der
Normal-
betrieb von Gießprozessen zu modellieren, und bei dem dann
bestimmte Statistiken durch das Modell berechnet werden, um
Ausnahmen vom Normalbetrieb beim gegenwärtigen Gießvorgang
zu erfassen und mögliche Durchbrüche vorherzusagen. Diese
beiden Verfahren konzentrieren sich jedoch auf das Feststellen und/oder Vorhersagen der Laufzeit-Gussdurchbrüche,
und es treten bei ihnen einige Schwierigkeiten auf, wenn
sie auf den Hochfahrvorgang angewendet werden.
Dem Anmelder ist auch der Stand der Technik der Verwendung
der multivariaten statistischen Technologie für die Überwachung
von
Stapelprozessen
anderen
Gebieten
industriellen
bekannt.
Anwendungen
und
die
Beispiele
zur
Fehlerdiagnose
auf
von
und
Überwachung
Verfahren
eines
Stapel-
prozesses unter Verwendung der multivariaten statistischen
Technologie wurden von MacGregor und seinen Mitarbeitern in
AIChE Journal, Band 40, 1994, Journal of Process Control,
Band
5,
1995
usw.
beschrieben.
In
der
Patentliteratur
- 6 -
wurden keine Anwendungen dieser multivariaten statistischen
Technologie
auf
Stranggießmaschinen-Hochfahrvorgänge
beschrieben.
Zusammenfassend sei bemerkt, dass bisher keine Verfahren
und Online-Systeme zur Überwachung von StranggießmaschinenHochfahrvorgängen
durchbrüchen
unter
und
zum
Verwendung
Vorhersagen
der
von
Anguss-
multivariaten
statis-
tischen Technologie adressiert wurden.
OFFENBARUNG DER ERFINDUNG
Diese Erfindung betrifft ein Online-System zur Überwachung
von
Hochfahrvorgängen
einer
Stranggießmaschine
auf
der
Grundlage der Verwendung eines multivariaten statistischen
Modells vom Typ der Mehrfach-Hauptkomponentenanalyse (MPCA)
und
das
entsprechende
Verfahren
zur
Entwicklung
eines
solchen Systems. Das Online-System ist in der Lage, einen
bevorstehenden
Angussdurchbruch
vorherzusagen
und
die
Prozessvariablen als die wahrscheinlichsten Grundursachen
für
den
vorhergesagten
Durchbruch
zu
identifizieren.
Zusätzliche Aspekte der Erfindung behandeln spezifisch die
Datensynchronisation des Hochfahrprozesses, die Entwicklung
des MPCA-Modells und die Implementation des Online-Systems,
welche im Stand der Technik nicht vorgefunden werden.
Gemäß dieser Erfindung wird ein neuer Hochfahrvorgang einer
Stranggießmaschine
durch
Vergleichen
mit
dem
normalen
Hochfahrvorgang, der durch ein multivariates statistisches
Modell unter Verwendung ausgewählter historischer Betriebsdaten mit Vergleichsmarken versehen ist, überwacht. Falls
der
neue
Vorgang
von
der
Vergleichsmarke
statistisch
- 7 -
verschieden ist, werden Alarme erzeugt, um einen bevorstehenden Angussdurchbruch anzugeben, und es werden gleichzeitig die Prozessvariablen, die zu Prozessabweichungen vom
Normalbetrieb bzw. vom normalen Vorgang führen, als die
wahrscheinlichsten
Grundursachen
für
den
vorhergesagten
Durchbruch identifiziert. Das Modell wird unter Verwendung
der MPCA-Technologie gebildet, um die Varianz von Vorgang
zu Vorgang in einem Raum mit reduzierten Dimensionen (auch
als ein latenter Variablenraum bekannt) auf der Grundlage
einer großen Anzahl von Prozesstrajektorien anhand früherer
normaler Hochfahrvorgänge zu charakterisieren. Die Prozesstrajektorien
Satzes
von
stellen
die
Änderungen
Prozessmessungen,
eines
erweiterten
einschließlich
der
Form-
temperaturen, der Gießgeschwindigkeit, der StopperstangenPosition,
einer
Daten
des
berechneten
begrenzten
in
Dauer
diesen
Wärmeflusses
eines
usw.,
Hochfahrvorgangs
Trajektorien
weisen
eine
innerhalb
dar.
Die
zeitlich
veränderliche und in hohem Maße autokorrelierte Struktur
auf, und die Verwendung der MPCA-Technologie ermöglicht es,
diese Daten in geeigneter Weise zu modellieren. Der Stand
der Technik auf der Grundlage der normalen PCA-Technologie
konnte diese Daten nicht behandeln und ist daher auf die
Anwendung auf den Laufzeitbetrieb bzw. auf den Laufzeitvorgang der Gießmaschine beschränkt.
Gemäß dieser Erfindung wird die als Angießdauer bekannte
Dauer des Hochfahrvorgangs durch die Stranglänge statt wie
gewöhnlich
durch
die
Gießzeit
definiert.
Die
Prozess-
trajektorien über die gesamte Angießdauer werden auf der
Grundlage der aktuellen Beobachtungen vorhergesagt und dann
durch Interpolieren auf der Grundlage zuvor spezifizierter
nicht
gleichmäßiger
Skalen
in
der
Stranglänge
synchro-
- 8 -
nisiert, so dass alle Trajektorien in Bezug auf die Stranglänge für die weitere Verwendung bei der Modellentwicklung
ausgerichtet werden können.
Die Erfindung enthält eine Online-Aktualisierungskomponente
zum kontinuierlichen Einstellen bestimmter Parameter (d.h.
Kontrollgrenzen) in den MPCA-Modellen auf der Grundlage der
neuen Daten zum Hochfahrvorgang. Dies ermöglicht es, dass
sich
das
Modell
teilweise
Normalbetriebsbereich,
die
selbst
durch
an
Drifts
die
von
Modelle
einem
nicht
charakterisiert werden, anpasst.
Zusätzlich ist in der Erfindung eine Zustandsbestimmungsfunktion enthalten, die verwendet wird, um festzustellen,
ob sich eine Stranggießmaschine in einem Hochfahrvorgang
oder einem Laufzeitvorgang befindet, so dass beide Vorgänge
in einem integrierten Überwachungssystem überwacht werden
können.
Die Erfindung weist die folgenden Aspekte auf, die sich
ausschließlich
im
Fall
der
Modellentwicklung
und
bei
Natur
von
Online-Implementationen ergeben:
die Definition der Angießdauer,
die
Auswahl
von
Prozessvariablen,
welche
die
Gießmaschinen-Hochfahrvorgängen darstellen,
die Vorhersage
der Prozesstrajektorie bei den
künftigen
Beobachtungen,
die
Prozesstrajektoriensynchronisation
auf
der
Grundlage
- 9 -
nicht gleichmäßiger Synchronisationsskalen in der Stranglänge,
ein Verfahren zum Identifizieren der Prozessvariablen als
die wahrscheinlichste Grundursache für den vorhergesagten
Durchbruch,
die Online-Aktualisierung von Modellparametern,
die Fähigkeit zum Bestimmen des Prozesszustands und zum
Überwachen
sowohl
des
Hochfahrvorgangs
als
auch
des
Laufzeitvorgangs in einem Online-Überwachungssystem.
Zusammenfassend sei bemerkt, dass es das Verfahren und die
Online-Anwendung
der
speziell
Hochfahrvorgänge
angewendeten
auf
Stranggießmaschinen-
MPCA-Technologie
zur
Über-
wachung und Vorhersage von Angussdurchbrüchen sind, welche
neu und nicht offensichtlich sind.
BESCHREIBUNG DER ZEICHNUNG
Zum besseren Verständnis der Erfindung wird nachstehend
eine
bevorzugte
Ausführungsform
mit
Bezug
auf
die
anliegende Zeichnung beschrieben. Es zeigen:
Figur 1 ein schematisches Diagramm einer Stranggießmaschine
aus dem Stand der Technik,
Figur 2 ein schematisches Diagramm eines auf eine Stranggießmaschine
angewendeten
Hochfahrvorgangs,
Systems
zum
Überwachen
eines
- 10 -
Figur 3
ein
Flussdiagramm,
Modellentwicklungsmodul
56
in
dem
gemäß
die
Schritte
dieser
in
dem
Erfindung
zur
Bildung eines MPCA-Modells anhand ausgewählter historischer
Daten zum Charakterisieren des Normalbetriebs eines Gießmaschinen-Hochfahrvorgangs dargelegt sind,
Figur 4
eine
Graphik
einer
Normalbetriebssequenz
eines
Stranggießprozesses,
Figur 5
ein
schematisches
Diagramm
einer
Stranggieß-
maschinenform, die gemäß dieser Erfindung verwendet wird,
wodurch der Ort jedes Thermoelements um die Form angegeben
wird und Thermoelementpaare definiert werden,
Figur 6 eine Graphik von Daten zum Gießmaschinen-Hochfahrvorgang in drei Dimensionen,
Figur 7
ein
Flussdiagramm,
in
dem
die
Schritte
zum
Synchronisieren von Prozessvariablentrajektorien in Bezug
auf die Stranglänge in der Angießdauer dargelegt sind,
Figur 8
eine
Graphik
von
Daten
des
synchronisierten
Gießmaschinen-Hochfahrvorgangs, die in Bezug auf die nicht
gleichmäßigen
Synchronisationsskalen
in
der
Stranglänge
ausgerichtet sind,
Figur 9
eine
Trajektorien
Graphik
auf
der
der
Berechnung
Grundlage
durchschnittlicher
der
synchronisierten
Trajektorien in dem Modellsatz,
Figur 10 eine Graphik des dreidimensionalen Datenblocks des
Gießmaschinen-Hochfahrvorgangs,
der
zu
einer
zwei-
- 11 -
dimensionalen Datenmatrix entfaltet wird, um die Richtung
von Hochfahrvorgängen zu bewahren,
Figur 11
ein
Flussdiagramm,
Prozessüberwachungsmoduls
dieser
Erfindung
dem
die
dargestellt
verwendet
maschinen-Hochfahrvorgang
in
wird,
zu
Schritte
sind,
um
einen
überwachen,
eines
das
gemäß
neuen
Gieß-
einen
bevor-
stehenden Angussdurchbruch vorherzusagen und die Prozessvariablen
als
die
wahrscheinlichsten
Grundursachen
des
vorhergesagten Durchbruchs zu identifizieren,
Figur 12 ein schematisches Diagramm eines Computernetzwerksystems zum Implementieren des Systems zum Überwachen des
Gießmaschinen-Hochfahrvorgangs,
um
Angussdurchbrüche
vorherzusagen,
Figur 13
eine
Graphik
von
vier
Systemzuständen
und
Zustandsänderungen zwischen diesen Zuständen, um sowohl die
Überwachung des Hochfahrvorgangs als auch die Überwachung
des Laufzeitvorgangs in ein Computersystem zu integrieren,
und
Figur 14 eine Graphik, die zeigt, wie die künftige Prozesstrajektorie
bei
einer
bestimmten
Beobachtung
auf
der
Grundlage der Annahme, dass die aktuelle Abweichung von der
durchschnittlichen Trajektorie über den Rest der Angießdauer konstant bleibt, vorhergesagt wird.
BEVORZUGTE AUSFÜHRUNGSFORM DER ERFINDUNG
Diese Erfindung betrifft ein Echtzeitsystem zum Überwachen
der
Hochfahrvorgänge
einer
Stranggießmaschine
und
zum
- 12 -
Vorhersagen
der
MPCA-Technologie
Angussdurchbrüche
und
das
unter
zugeordnete
Verwendung
der
Verfahren
zum
Entwickeln eines solchen Systems. Das System wird durch ein
Prozesscomputersystem
implementiert
und
kann
auf
eine
Vielzahl von Stranggießmaschinen angewendet werden, wobei
es nicht durch die individuellen Entwurfsmerkmale, wie den
Produkttyp (d.h. Barren, Block oder Bramme), den Formtyp
(d.h. eine Rohrform oder eine Plattenform) usw. beschränkt
ist.
Wie
zuvor
beschrieben
wurde,
ist
ein
Beispiel
dieser
Stranggießmaschinen in Figur 1 dargestellt. Für eine solche
Stranggießmaschine ist ein Echtzeit-Computersystem, das in
der Lage ist, die Hochfahrvorgänge einer Gießmaschine zu
überwachen und Angussdurchbrüche vorherzusagen, in Figur 2
dargestellt. Zusätzlich zu dem Prozessteil gibt es viele
verschiedene
Typen
von
Sensoren
46,
die
sich
in
der
gesamten Stranggießmaschine befinden, wobei jeder Sensor
eine
andere
Messung
erhält,
die
die
aktuelle
Betriebs-
bedingung der Stranggießmaschine darstellt. Diese Messungen
können
das
Tundish-Gewicht,
die
Formtemperaturen,
das
Niveau geschmolzenen Stahls in der Form, die Temperaturen
und
Strömungsraten
Kühlwasser
usw.
von
einströmendem
einschließen,
sind
und
jedoch
ausströmendem
nicht
darauf
beschränkt. Es sei bemerkt, dass die Sensoren und erhaltenen Prozessmessungen bei verschiedenen Prozessauslegungen
von Stranggießmaschinen unterschiedlich sein können, und
dass die Erfindung nicht darauf beschränkt ist. Die von
diesen
Sensoren
erhaltenen
Messungen
werden
online,
in
Echtzeit durch ein Datenkommunikationsserver 48 gesammelt
und
dann
zu
einem
Online-Prozessüberwachungsmodul
50
gesendet. Sobald das Prozessüberwachungsmodul die Echtzeit-
- 13 -
Prozessmessdaten empfängt, wird eine Reihe von Berechnungen
auf der Grundlage eines gegebenen multivariaten statistischen
Modells
52
ausgeführt,
um
einen
bevorstehenden
Angussdurchbruch vorherzusagen. Die sich ergebenden Alarme
und
die
identifizierten
wahrscheinlichsten
Grundursachen
für den vorhergesagten Durchbruch werden zu einer MenschMaschine-Schnittstelle (HMI) 54
gesendet und auf dieser
angezeigt.
Gleichzeitig
ist
für
Senden
Echtzeit-Prozessdaten
das
historischen
der
Datenbank
58
das
Prozessüberwachungsmodul
für
zu
einer
Datenarchivierungszwecke
verantwortlich. Die multivariaten statistischen Modelle 52
werden
offline
gebildet,
in
durch
dem
ein
der
Modellentwicklungsmodul
normale
Hochfahrvorgang
56
der
Stranggießmaschine durch das Modell anhand der ausgewählten
historischen
Daten
in
der
Datenbank
58
charakterisiert
wird. Wenn das Modell online implementiert wird, werden
einige
Modellparameter
auf
der
Grundlage
der
zuletzt
verfügbaren Daten des Hochfahrvorgangs online aktualisiert,
um
mögliche
Drifts
Hochfahrvorgangs,
von
die
einem
Bereich
eines
normalen
durch
die
Modelle
nicht
charakterisiert sind, teilweise zu kompensieren. Zusätzlich
ist ein Funktionsweise-Auswertungsmodul 60 zu dem System
hinzugefügt, um Alarme von Angussdurchbrüchen zu überwachen
und auf der Grundlage neuer Daten zum Hochfahrvorgang zu
bestimmen, ob das Modell neu gebildet werden muss.
Figur 3 ist ein Flussdiagramm, in dem die Schritte des
Modellentwicklungsmoduls
Bilden
eines
historischen
56
gemäß
MPCA-Modells
Daten,
um
den
dieser
anhand
Erfindung
der
Normalbetrieb
zum
ausgewählten
des
Hochfahr-
vorgangs der Gussmaschine zu charakterisieren, dargestellt
sind.
Gemäß
einer
nachstehend
beschriebenen
bevorzugten
- 14 -
Ausführungsform
wobei
die
wird
Erfindung
jeder
eine
Schritt
Anzahl
detailliert
von
Aspekten
erklärt,
aufweist,
welche die erfolgreiche Verwirklichung beeinflussen.
Abrufen historischer Daten
Zum Bilden eines MPCA-Modells
zur Charakterisierung des
normalen Hochfahrvorgangs einer Stranggießmaschine ist eine
große Anzahl historischer Daten, welche den größten Teil
eines normalen Betriebsbereichs bei einem GießmaschinenHochfahrprozess abdecken, erforderlich.
Die bei 62 angegebene Prozedur zum Abrufen historischer
Daten wird nun detailliert mit Bezug auf eine bevorzugte
Ausführungsform
beschrieben.
Insgesamt
124
Prozess-
variablen, einschließlich tatsächlicher Sensormessungen und
berechneter technischer Variablen, die sich auf die Stranggießmaschine
beziehen,
werden
beim
Abtastintervall
von
400 ms über einen Zeitraum von etwa 12 Monaten von einer
Prozessgeschichtsdatenbank 58 gesammelt. Es sei bemerkt,
dass der Zeitraum und das Abtastintervall, die hier spezifiziert wurden, als Beispiel für bevorzugte Einstellungen
für das Sammeln einer ausreichenden Datenmenge bei einer
erfüllten Abtastfrequenz im Vergleich mit der
Betriebs-
geschwindigkeit
und
der
Stranggießmaschine
dienen,
dass
diese Erfindung daher nicht darauf beschränkt ist.
Die Prozedur zum Abrufen historischer Daten führt zu einem
zweidimensionalen Datensatz mit 124 Prozessvariablen durch
216000
Beobachtungen
zeitraums
und
einer
während
recht
Zeitraum von 12 Monaten.
eines
großen
24-Stunden-BetriebsDatenmatrix
über
den
- 15 -
Nachdem die historischen Daten abgerufen worden sind, muss
der sich ergebende Datensatz reduziert werden, um ihn für
die
Modellentwicklungszwecke
geeignet
zu
machen.
Gemäß
einer bevorzugten Ausführungsform wird die Datenreduktion
durch Auswählen von Daten in einer geeignet definierten
Dauer und Auswählen der geeigneten Prozessvariablen, die in
der Lage sind, die Natur des Stranggießmaschinen-Hochfahrvorgangs darzustellen, erreicht.
Auswählen von Daten in einer vordefinierten Angussdauer
Die
gesamte
besteht
aus
Betriebssequenz
den
folgenden
einer
drei
Stranggießmaschine
Phasen:
einem
Hochfahr-
vorgang 81, einem Laufzeitvorgang 82 und einem Herunterfahrvorgang 83. Figur 4 gibt einige Beispiele der erhaltenen
historischen
Daten,
worin
die
Prozesstrajektorien
bestimmter Prozessvariablen in verschiedenen Phasen dargestellt
variablen
sind.
Die
umfassen
in
die
Thermoelementtemperaturen
Figur
4
dargestellten
Gießgeschwindigkeit
85
und
86,
einen
Prozess84,
zwei
durch
eine
ausgewählte Formfläche übertragenen Wärmefluss 87 und das
Stranggieß-Hinweiszeichen 88, das angibt, ob die Stranggießmaschine tatsächlich Stränge erzeugt.
Der Hochfahrvorgang betrifft den Zeitraum ganz zu Anfang
der
gesamten
Betriebssequenz.
Während
dieses
begrenzten
Zeitraums wird die Gießgeschwindigkeit gemäß einer bevorzugten Ausführungsform kontinuierlich von 0,1 m/min bis auf
0,7
m/min
oder
darüber
erhöht.
Gleichzeitig
weisen
die
meisten Prozessvariablen, wie Thermoelementtemperaturen und
der Wärmefluss, wie bei 81 dargestellt ist, verschiedene
- 16 -
dynamische
auf.
Der
Übergänge
bei
zunehmender
Laufzeitvorgang
die
folgt
vorgang,
wenn
normaler
Gießgeschwindigkeit
Laufzeitvorgangs
eines
kurzen
häufig
Stranggießmaschine
kann
die
Zeitraums
beispielsweise
Geschwindigkeit
einen
für
glatt
einem
in
Hochfahr-
einem
läuft.
einen
des
innerhalb
spezielle
Tundish-Wechsel,
Bereich
Während
Gießgeschwindigkeit
einige
84
Aufgaben,
SEN-Wechsel
usw., unter 0,7 m/min abfallen. Eine Normalbetriebssequenz
einer
Stranggießmaschine
endet
mit
einem
Herunterfahr-
vorgang, bei dem die Gießgeschwindigkeit dramatisch bis auf
Null abfällt.
Zum Überwachen des Hochfahrvorgangs und zum Vorhersagen von
Angussdurchbrüchen
unter
Verwendung
der
MPCA-Technologie
muss die Dauer des Hochfahrvorgangs, die auch als Angussdauer bekannt ist, gesondert definiert werden. Gemäß einer
bevorzugten
Ausführungsform
wird
die
Gießzeit
nicht
verwendet, um die Angussdauer wie gewöhnlich zu definieren,
weil
der
Hochfahrvorgang
infolge
einer
geänderten
Beschleunigung der Gießgeschwindigkeit früher oder später
enden kann (d.h. die Gießgeschwindigkeit kann
zunehmen,
konstant bleiben oder sogar zu irgendeiner Zeit während der
Angussdauer
abnehmen).
Stattdessen
wird
eine
berechnete
Prozessvariable, nämlich die Stranglänge, zusammen mit der
Gießgeschwindigkeit
verwendet,
um
die
Angussdauer
folgendermaßen zu definieren:
Die Angussdauer beginnt zu der mit t0 bezeichneten Zeit, zu
der die Gießgeschwindigkeit 0,1 m/min übersteigt. Zu dieser
Zeit wird die mit L bezeichnete Stranglänge gleich null
gesetzt, d.h. L(t0) = 0;
- 17 -
wenn der Hochfahrvorgang abläuft, wird die Stranglänge zur
Zeit t durch
L(t) = L(t – 1) + v(t – 1) * ts
berechnet, wobei t und t – 1 das aktuelle bzw. das vorhergehende Zeitintervall darstellen;
v(t – 1)
ist
die
zur
Zeit
t – 1
gemessene
Gieß-
geschwindigkeit, und ts ist das bevorzugte Abtastintervall;
die Angussdauer endet dann zu der mit tf bezeichneten Zeit,
wenn die Stranglänge 3,2 Meter übersteigt, d.h.
tf = min{t|L(t) 3,2, t > t0}.
Der Wert von 3,2 Meter wird zunächst auf der Grundlage
früheren
Prozesswissens
Erfassung
im
ausgewählt
Gleichgewichtszustand
und
dann
durch
überprüft,
um
die
zu
gewährleisten, dass der Betrieb der Gießmaschine zum Ende
der Angussdauer einen Gleichgewichtszustand erreicht. Ein
Fachmann wird verstehen, dass sich dieser Wert unabhängig
von
verschiedenen
Gießprozessen
ändern
kann
und
noch
annehmbare Ergebnisse liefern kann und dass diese Erfindung
daher nicht darauf beschränkt ist.
Sobald
die
Daten
in
ausgewählt.
Angießdauer
dieser
Dauer
definiert
jeder
wurde,
werden
nur
die
Betriebssequenz
bei
64
- 18 -
Wählen geeigneter Prozessvariablen
Das
Wählen
kritische
geeigneter
Punkt
für
Prozessvariablen
den
Erfolg
der
ist
der
andere
Datenreduktion.
Die
Prozeduren zum Wählen geeigneter Prozessvariablen folgen
einer Anzahl einfacher Verfahren, wie die Verwendung von
Prozesswissen, eine Sichtinspektion oder eine statistische
Berechnung usw., wie nachstehend detailliert beschrieben
wird. Diese Verfahren können einzeln oder vorzugsweise in
Kombination verwendet werden, um die Prozessvariablen zu
wählen,
die
einen
erheblichen
Einfluss
auf
Anguss-
durchbrüche haben.
Wie zuvor angegeben wurde, werden insgesamt 124 Prozessvariablen aus der Geschichtsdatenbank abgerufen, und sie
können in die folgenden Gruppen unterteilt werden:
Thermoelement-Messwerte, einschließlich insgesamt 44 Formtemperaturen und ihrer Differenzen,
Forminformationen,
frequenz,
der
einschließlich
der
Stopperstangen-Position,
Formoszillationsder
SEN-Eintauch-
tiefe, der Formbreite usw.,
Tundish-Informationen, einschließlich des Nettogewichts des
Tundish-Wagens, des SEN-Argonflusses usw.,
Kühlwasserinformationen,
einschließlich
Einlass-/Auslass-
Kühlwasserflüsse und Temperaturen,
Wärmeübertragungsinformationen,
einschließlich
des
durch
- 19 -
die Formflächen übertragenen Wärmeflusses,
Zusammensetzungsinformationen, einschließlich der Zusammensetzung
von
Kohlenstoff,
Mangan,
Silicium
usw.
in
dem
geschmolzenen Stahl.
Gemäß einer bevorzugten Ausführungsform wird eine Reihe von
Kriterien
auf
die
Auswahl
geeigneter
Prozessvariablen
angewendet:
Durch
die
Verwendung
von
Prozesswissen
werden
alle
Variablen ausgewählt, von denen bekannt ist, dass sie für
Hochfahrvorgänge
entscheidend
oder
für
Angussdurchbrüche
relevant sind,
durch Ausführen einer Sichtinspektion werden alle Variablen
ausgewählt, die einen dynamischen Übergang in der bei 64
definierten Angießdauer offenbaren, während alle Variablen,
die sehr seltene Änderungen im Vergleich mit der Prozessdynamik während der Angießdauer zeigen, nicht ausgewählt
werden,
durch
Ausführen
statistischer
Berechnungen
wird
jede
Variable, die mehr als 20 % fehlender Daten in der Angießdauer enthält oder eine sehr kleine Varianz der Abweichung
von der durchschnittlichen Trajektorie hat (anhand verfügbarer historischer Daten berechnet), nicht ausgewählt.
Die Anwendung dieser Kriterien führt dazu, dass 62 der 124
Prozessvariablen
in
werden. Diese sind:
Schritt
66
aus
Figur
3
ausgewählt
- 20 -
Form-Thermoelement-Messwerte,
Temperaturdifferenzen
zwischen
den
vordefinierten
Thermoelementpaaren (siehe unten),
die Stopperstangen-Position,
das Nettogewicht des Tundish-Wagens,
Form-Kühlwasserflüsse,
die Temperaturdifferenz zwischen dem einfließenden und dem
ausfließenden Form-Kühlwasser,
die Gießgeschwindigkeit,
der durch jede
Formfläche übertragene berechnete Wärme-
fluss.
Die Thermoelementorte um die Form gemäß einer bevorzugten
Ausführungsform
sind
in
Figur
5
dargestellt.
Auf
der
östlichen Seite 92 und der westlichen Seite 93 der Form
gibt es jeweils zwei ein vertikales Paar bildende Thermoelemente. Auf der nördlichen Seite 94 und der südlichen
Seite
95
des
Modells
gibt
es
jeweils
dreizehn
Thermoelemente, wobei zwölf von ihnen sechs vertikale Paare
bilden. Zwei zusätzliche Paare sind durch 96 und 98 auf der
südlichen Seite und 100 und 102 auf der nördlichen Seite
ausgebildet.
Der
durch
jede
Formfläche
Wärmefluss lässt sich folgendermaßen berechnen:
Q = Cp * Fw * T /A,
übertragene
- 21 -
wobei
Q
der
berechnete
Wärmefluss
ist,
Cp
die
Wärme-
kapazität des Kühlwassers ist, Fw der Kühlwasserfluss ist,
T die Temperaturdifferenz zwischen dem einströmenden und
dem
ausströmenden
Kühlwasser
ist
und
A
die
Größe
der
Formfläche ist.
Der Fachmann wird verstehen, dass, wenn andere Prozessvariablen verfügbar werden, die die vorstehend erwähnten
Kriterien erfüllen, diese ausgewählt werden, um die Modellqualität
zu
Vorhersage
verbessern
von
und
die
Leistungsfähigkeit
Angussdurchbrüchen
weiter
zu
der
verbessern.
Daher ist die Erfindung nicht darauf beschränkt.
Bilden des Modells und von Prüfdatensätzen
Nach
dem
Reduzieren
des
aus
der
Geschichtsdatenbank
abgerufenen großen Datensatzes durch Auswählen der Daten
geeigneter Prozessvariablen in der definierten Angießdauer
wird der reduzierte Datensatz
als ein dreidimensionaler
Datenblock 104 reorganisiert, wie in Figur 6 dargestellt
ist,
wobei
jeder
Hochfahrvorgang
106
als
eine
zwei-
dimensionale Datenmatrix mit ausgewählten Variablen durch
eine
Anzahl
von
Beobachtungen
in
der
Angießdauer
beschrieben wird. Insbesondere bezieht sich das Element (i,
j, k) des Datenblocks 104 auf den Wert der Variablen j bei
der Beobachtung i beim Vorgang Nr. k. Es sei bemerkt, dass
in
diesem
Datenblock
jeder
Hochfahrvorgang
das
gleiche
Abtastintervall von 400 ms aufweist, dass sie jedoch unterschiedliche Anzahlen von Beobachtungen aufweisen können,
weil die Angießdauer von einem Vorgang zu einem anderen
variiert.
- 22 -
Die Hochfahrvorgänge können durch Anwenden der folgenden
Kriterien in 3 Gruppen unterteilt werden:
Ein Hochfahrvorgang gehört zu Gruppe A, falls in diesem
Vorgang ein Angussdurchbruch auftritt,
ein Hochfahrvorgang gehört zu Gruppe B, falls in diesem
Vorgang
kein
Durchbruch
auftritt
und
die
folgenden
Bedingungen erfüllt sind: Es gibt keine fehlenden Daten in
der Gießgeschwindigkeit, die Gießgeschwindigkeit zu Beginn
des Angießvorgangs ist kleiner als 0,1 m/min, die Breite
des Gießstrangs wird während der gesamten Angießdauer nicht
geändert, die durchschnittliche Gießbeschleunigung über die
gesamten Angießvorgänge ist größer als 0,0015 m2/s, und die
Temperaturdifferenz zwischen dem
oberen und
dem
unteren
Thermoelement in einem Thermoelementpaar ist zu Beginn der
Angießdauer kleiner als 5 °C und an ihrem Ende größer als
10 °C,
der Rest der Hochfahrvorgänge gehört zu Gruppe C.
Daher werden bei 68 zwei Datensätze, nämlich ein Modellsatz
und
ein
Prüfsatz,
aus
den
Gruppen
A
und
B
gebildet.
Beispielsweise werden gemäß einer bevorzugten Ausführungsform
80 %
der
Hochfahrvorgänge
in
Gruppe
B
beliebig
ausgewählt, um den Modellsatz zu bilden, und die restlichen
20 % der Hochfahrvorgänge in Gruppe B sowie alle Hochfahrvorgänge in Gruppe A werden ausgewählt, um den Prüfsatz zu
bilden.
Der
Modellsatz
wird
zum
Entwickeln
von
MPCA-
Modellen verwendet, um den Angussdurchbruch vorherzusagen,
und der Prüfsatz wird verwendet, um die Vorhersagefähigkeit
- 23 -
der
entwickelten
Modelle
zu
prüfen,
wenn
ein
neuer
Hochfahrvorgang präsentiert wird.
Der Modellsatz sollte den Normalbetriebsbereich umspannen,
und es ist erforderlich, dass der Modellsatz mindestens 100
Angießvorgänge enthält.
Es sei bemerkt, dass die vorstehend erwähnten Einstellungen
zum
Bilden
von
Ausführungsformen
Modell-
und
geändert
Prüfsätzen
werden
in
können
verschiedenen
und
dass
die
Erfindung nicht darauf beschränkt ist.
Synchronisieren von Prozesstrajektorien
Die Erfindung ist dafür eingerichtet, ein statistisches
Modell
für
variable
von
die
Abweichung
ihrer
jeder
vorgewählten
durchschnittlichen
Prozess-
Trajektorie
unter
Verwendung der historischen Daten bei normalen Hochfahrvorgängen zu bilden. Dann vergleicht sie die Abweichung von
der
durchschnittlichen
Trajektorie
derselben
Prozess-
variablen in einem neuen Hochfahrvorgang mit dem Modell,
wobei jede Differenz, die nicht statistisch der üblichen
Prozessvariation zugeschrieben werden kann, angibt, dass
der neue Vorgang von dem normalen Vorgang abweicht. Dieser
Vergleich gemäß dieser Erfindung erfordert es, dass alle
Trajektorien in verschiedenen Hochfahrvorgängen die gleiche
Dauer haben und mit dem Fortschritt von Hochfahrvorgängen
synchronisiert sind.
Wie zuvor angegeben wurde, weist sowohl bei einem Modellsatz als auch bei einem Prüfsatz jeder Hochfahrvorgang eine
andere Anzahl von Beobachtungen auf. Diese Daten sind nicht
- 24 -
zum Bilden eines MPCA-Modells geeignet.
Gemäß einer bevorzugten Ausführungsform der Erfindung wird
auf
der
skalen
Grundlage
in
der
nicht
gleichmäßiger
Stranglänge
eine
Synchronisations-
Prozesstrajektorien-
Synchronisationsprozedur bei 70 entwickelt und nachstehend
detailliert beschrieben.
Mit Bezug auf Figur 7 sei bemerkt, dass vier Schritten
gefolgt
wird,
um
die
Prozesstrajektorien
zu
synchroni-
sieren.
Zuerst wird ein nominelles Gießgeschwindigkeitsprofil bei
110
anhand
Funktion
historischer
wird
Daten
verwendet,
um
erhalten.
das
Eine
lineare
ansteigende
geschwindigkeitsprofil, welches durch v0
Gieß-
bezeichnet ist,
mit Bezug auf die Zeit t näherungsweise zu beschreiben:
v0(t) = a * t + b,
wobei gemäß einer bevorzugten Ausführungsform der Parameter
a gleich 4,15 x 10-5 ist und b gleich 1,7 x 10-3 ist.
Dann kann die mit L0 bezeichnete nominelle Stranglänge bei
112
durch
Berechnen
des
Integrals
der
nominellen
Gieß-
geschwindigkeit erhalten werden:
L0(t) = 0,5 * a * t2 + b * t.
Als nächstes wird bei 114 die nominelle Stranglänge durch
die nicht gleichmäßigen Synchronisationsskalen, die mit s
bezeichnet sind, neu abgetastet und durch
- 25 -
s(i) = 0,5 * a * (i * T/N)2 + b * (i * T/N), i = 0 ... N
bestimmt, wobei i der Index von s ist, T die nominelle
Dauer des Hochfahrvorgangs, die durch L0(T) = 3,2 Meter
berechnet wird, ist, und N die Anzahl der Skalen in der
Stranglänge ist. Eine Leitlinie zum Bestimmen des Werts von
N ist durch
N = min {n|T/n < ts, n > 0}
gegeben, wobei ts das Abtastintervall ist, das gemäß einer
bevorzugten
Ausführungsform
dieser
Erfindung
400 ms
beträgt.
Sobald
die
Synchronisationsskalen
in
der
Stranglänge
bestimmt worden sind, wird die Trajektoriensynchronisation
bei
116
durch
Interpolieren
der
Trajektorien
anderer
ausgewählter Prozessvariablen auf der Grundlage der Skalen
der Stranglänge
ausgeführt. Demgemäß entspricht bei dem
synchronisierten
Datensatz
jede
Beobachtung
einer
Synchronisationsskala in der Stranglänge.
Es
sei
bemerkt,
dass
an
Stelle
nicht
gleichmäßiger
Synchronisationsskalen in der Stranglänge auch gleichmäßige
Skalen auf die Stranglänge angewendet werden können, um die
Trajektorien zu synchronisieren. Dies impliziert, dass die
Stranglänge über N Abtastwerte gleichmäßig neu abgetastet
wird. Dieses Verfahren führt jedoch dazu, dass die MPCABerechnung
zu
ausgeführt
wird,
geschwindigkeit
Beginn
im
als
des
Angießvorgangs
an
seinem
Laufe
des
Ende,
weniger
weil
Angießvorgangs
häufig
die
Gieß-
fast
immer
- 26 -
zunimmt.
Wie
wir
wissen,
folgt
der
Hochfahrvorgang
der
Stranggießmaschine normalerweise drei Stufen, nämlich dem
anfänglichen
Start,
dem
dynamischen
Übergang
und
dem
endgültigen Gleichgewichtszustand, und er zeigt üblicherweise in der Anfangsstufe und zu Beginn der Übergangsstufe
mehr
Prozessstörungen.
Daher
kann
ein
gleichmäßiges
Skalierungsverfahren dazu führen, dass Gelegenheiten zum
Erkennen von Angussdurchbrüchen in einem
verpasst
werden.
Dagegen
bietet
das
frühen Stadium
nicht
gleichmäßige
Skalierungsverfahren eine Gelegenheit zum Erkennen früher
Angussdurchbrüche, insbesondere wenn sie an der Anfangsstufe und der Übergangsstufe auftreten.
Als Ergebnis des Ausführens einer Trajektoriensynchronisation
wird
erhalten,
ein
wie
neuer
in
dreidimensionaler
Figur
8
dargestellt
Datenblock
ist,
worin
118
alle
Prozesstrajektorien bei verschiedenen Hochfahrvorgängen in
Bezug auf die gegebenen Synchronisationsskalen 120 in der
Stranglänge
Datenblock
ausgerichtet
118
die
sind.
Überdies
durchschnittliche
kann
in
Trajektorie
dem
jeder
ausgewählten Prozessvariable leicht berechnet werden. Figur
9 zeigt ein Beispiel der sich ergebenden durchschnittlichen
Trajektorie 122 aus einer gegebenen Anzahl synchronisierter
Trajektorien 124.
Entwickeln von MPCA-Modellen
Vor der Online-Implementation des Systems werden bei 72
(Figur 3) MPCA-Modelle auf der Grundlage der synchronisierten Daten in dem Modellsatz bestimmt. Die Daten in dem
synchronisierten dreidimensionalen Datenblock 118 werden,
wie zuvor in Figur 8 beschrieben wurde, mittelwertzentriert
- 27 -
und autoskaliert, um den Mittelwert und die Einheitsvarianz
spaltenweise auf Null zu setzen. Die Mittelwertzentrierung
wird verwendet, um die durchschnittliche Trajektorie jeder
Prozessvariable zu subtrahieren, so dass die Daten nur die
Abweichung
von
der
durchschnittlichen
die
Prozessnichtlinearität
stellen,
und
zumindest
teilweise
verwendet,
um
eine
entfernt.
Die
Trajektorie
wird
Autoskalierung
Einheitsvarianzverteilung
mit
dardaher
wird
einem
Mittelwert von Null für jede Variable bei jeder Beobachtung
zu erhalten, um der Variable das gleiche Prioritätsgewicht
zuzuweisen.
Mit Bezug auf Figur 10 sei bemerkt, dass das Kernkonzept
der
MPCA-Technologie
darin
besteht,
den
mittelwert-
zentrierten und autoskalierten dreidimensionalen Datenblock
126 zu entfalten, um die Richtung der Hochfahrvorgänge 128
zu
bewahren.
Der
Datenblock
126
wird
entlang
der
Beobachtungsrichtung 130 vertikal aufgeschnitten, und die
erhaltenen Ausschnitte 132 werden nebeneinander gelegt, um
eine zweidimensionale Datenmatrix X 134 mit einer großen
Spaltendimension
zu
bilden,
so
dass
jede
Zeile
einem
Hochfahrvorgang entspricht. Es wird dann ein Standard-PCAAlgorithmus auf diese entfaltete Datenmatrix X angewendet:
Die Daten in dieser Matrix werden auf einen durch eine
Ladematrix
P
definierten
neuen
latenten
Variablenraum
projiziert, wobei der größte Teil der in den ursprünglichen
Daten enthaltenen Prozessvarianz von nur wenigen als Hauptkomponenten bekannten latenten Variablen erfasst wird. Die
Werte der Hauptkomponenten für jeden Hochfahrvorgang werden
als
Maße
bezeichnet,
die
durch
T
angegeben
werden.
Es
werden zwei Statistiken, nämlich die Quadrierte-Vorhersagefehler-Statistik
(SPE-Statistik)
und
die
"Hotelling-T-
- 28 -
Statistik" (HT-Statistik) bei jeder Beobachtung
auf der
Grundlage der Ladematrix P und der Maße T definiert, so
dass
sie
beschreiben
Modellsatz mit
können,
wie
jeder
Vorgang
in
dem
dem normalen Vorgang übereinstimmt, wenn
sich der Vorgang mit zunehmender Stranglänge entwickelt.
Ähnlich
der
Philosophie
der
univariaten
statistischen
Prozesssteuerung müssen die Kontrollgrenzen sowohl für SPE
als auch für HT bei 74 bestimmt werden (Figur 3), um einen
neuen
Hochfahrvorgang
diese
beiden
zu
Statistiken
überwachen.
unter
der
Theoretisch
Annahme,
folgen
dass
alle
Prozessvariablen und die sich ergebenden Maße T multinormal
verteilt
sind,
bekannten
Wahrscheinlichkeitsverteilungen.
Eine solche Annahme kann jedoch nicht auf den Hochfahrvorgang
der
Stranggießmaschine
angewendet
werden.
Gemäß
einer bevorzugten Ausführungsform dieser Erfindung werden
die
Kontrollgrenzen
sowohl
für
SPE
als
auch
für
HT
folgendermaßen durch die Geschichtsdaten in dem Modellsatz
bestimmt. Für jede Operation in dem Modellsatz werden SPE
und HT bei jeder Beobachtung der Stranglänge berechnet. Bei
jeder Beobachtung werden die Histogramme von SPE oder HT
über alle Hochfahrvorgänge in dem Modellsatz aufgetragen,
und die SPE- oder HT-Kontrollgrenze bei dieser Beobachtung
wird so bestimmt, dass nur bei 5 % der Vorgänge in dem
Modellsatz SPE oder HT jenseits der Kontrollgrenze liegt.
Überdies wird auch der Beitrag jeder Variablen zu SPE oder
HT bei jeder Beobachtung der Stranglänge berechnet. Das
gleiche Verfahren, das vorstehend beschrieben wurde, wird
angewendet, um die Kontrollgrenzen für diese Beiträge zu
bestimmen.
- 29 -
Es ist möglicherweise erforderlich, dass eine Anzahl von
Modellen entwickelt werden muss, um den gesamten Bereich
der Betriebsbedingungen von Gießmaschinen abzudecken. Dies
hängt in hohem Maße von dem Prozess selbst und davon ab, ob
es eine Anzahl verschiedener Betriebsbedingungen gibt, von
denen jede möglicherweise ein getrenntes Modell benötigt.
Typische Faktoren, die die Anzahl der benötigten Modelle
beeinflussen
können,
umfassen
ohne
Einschränkung
die
Stahlqualität, die Breite des Gießstrangs usw. Gemäß einer
bevorzugten Ausführungsform dieser Erfindung werden drei
MPCA-Modelle entwickelt:
ein
Breitgießmodell,
angewendet
wird,
bei
das
denen
auf
die
die
Breite
Hochfahrvorgänge
des
Gießstrangs
größer als 1,25 Meter ist,
ein
Mittelgießmodell,
angewendet
wird,
bei
das
denen
auf
die
die
Breite
Hochfahrvorgänge
des
Gießstrangs
größer als 1,0 Meter und kleiner oder gleich 1,25 Meter
ist,
ein
Schmalgießmodell,
angewendet
wird,
bei
das
denen
auf
die
die
Breite
Hochfahrvorgänge
des
Gießstrangs
kleiner oder gleich 1,0 Meter ist.
Fachleute werden verstehen, dass ein spezifisches Modell
für
eine
bestimmte
Betriebsbedingung
gebildet
werden
könnte, um den Erfolg von Angussdurchbruchsvorhersagen zu
verbessern, und die Erfindung ist daher nicht auf die drei
vorstehend beschriebenen Modelle beschränkt.
- 30 -
Prüfen des sich ergebenden Modells
Der letzte Schritt in dem Verfahren vor dem Eingeben der
sich ergebenden MPCA-Modelle in ein Online-Überwachungssystem
besteht
darin,
das
Modell
unter
Verwendung
der
Hochfahrvorgangsdaten in dem bei 76 (Figur 3) definierten
Prüfsatz zu prüfen.
Wie vorstehend beschrieben wurde, weist der Prüfsatz sowohl
normale Hochfahrvorgänge als auch abnorme Vorgänge mit den
Angussdurchbrüchen auf. Drei Vergleichsmarken werden gemäß
einer bevorzugten Ausführungsform verwendet, um das sich
ergebende Modell zu prüfen:
die Rate falscher Alarme, die in der Statistik auch als
Typ-I-Fehler bekannt ist,
die Rate fehlerhafter Alarme, die in der Statistik auch als
Typ-II-Fehler bekannt ist,
die Vorlaufzeit bis zum Ausbruch, die sich auf das Zeitintervall zwischen dem ersten Alarm und einem tatsächlichen
Ausbruch bezieht.
Die
Anfangswerte
Alarme,
Sekunden
sind
auf
20 %
10 %
für
die
Rate
für
die
Vorlaufzeit
für
die
fehlerhafter
bis
zum
Rate
Alarme
Ausbruch
falscher
und
3
gelegt.
Sobald das Modell diese Prüfvergleichsmarken erfolgreich
erfüllt hat, ist es für die Online-Implementation bereit.
Der Fachmann wird verstehen, dass die erwähnten Vergleichs-
- 31 -
marken ausgeglichen werden müssen, um sowohl in Bezug auf
die
Leistungsfähigkeit
als
auch
auf
die
Robustheit
des
Modells ein praktisch einsetzbares MPCA-Modell zu erhalten.
Das heißt, dass das Modell eine gute Vorhersagefähigkeit
von
Angussdurchbrüchen
aufweisen
muss
und
gleichzeitig
recht robust für übliche Prozessstörungen sein muss.
Einige Verfahren können verwendet werden, um das Modell
abzustimmen, um die vorbestimmten Prüfvergleichsmarken zu
erfüllen. Diese Verfahren umfassen folgende, sind jedoch
nicht auf diese beschränkt:
Erhöhen der Größe des Modellsatzes, indem eine größere Zahl
normaler Hochfahrvorgänge erhalten wird,
Verfeinern der ausgewählten Prozessvariablenliste, um zu
vermeiden, dass entscheidende Prozessvariablen ausgelassen
werden,
Erhöhen der Anzahl der Hauptkomponenten, um eine größere
Prozessvarianz zu erfassen, oder Verringern von ihr, um ein
robusteres Modell zu erhalten,
Neuabstimmen der Kontrollgrenzen für die SPE- und die HTStatistik,
Klassifizieren
von
Hochfahrvorgängen
von
Gießmaschinen
durch Bedingungen (in der Art von Produktqualitäten usw.)
und Entwickeln von Modellen für jede verschiedene Betriebsbedingung.
Diese Verfahren können einzeln oder vorzugsweise in Kombi-
- 32 -
nation angewendet werden, um
ein praktisch einsetzbares
Modell zu entwickeln, das die wirklichen Anforderungen der
Überwachung des Gießmaschinen-Hochfahrvorgangs erfüllt.
Nach dem erfolgreichen Abschluss der vorstehend erwähnten
Prozeduren in dem Modellentwicklungsmodul bei 56 wird ein
Satz
von
MPCA-Modellen
52
entwickelt
und
ist
für
die
Online-Implementation bereit. Diese Modelle enthalten alle
notwendigen Informationen zum Ausführen aller Berechnungen
in dem Prozessüberwachungsmodul 50, zum Online-Überwachen
eines neuen Gießmaschinen-Hochfahrvorgangs in Echtzeit und
zum
Vorhersagen
eines
bevorstehenden
Angussdurchbruchs
(Figur 2).
Sobald
die
MPCA-Modelle
52
bei
56
offline
entwickelt
wurden, werden sie in das Online-Prozessüberwachungsmodul
50 geladen. Das Prozessüberwachungsmodul enthält intensive
Schritte dazu, wie die MPCA-Modelle zu verwenden sind, um
die gewünschten Ergebnisse zu erreichen, welche nachstehend
beschrieben werden.
Mit Bezug auf Figur 11 sei bemerkt, dass gemäß einer bevorzugten
Ausführungsform
alle
Sensormessungen
eines
neuen
Gießmaschinenbetriebs bei 140 zu einem vorgegebenen Abtastintervall online gesammelt werden. Die Echtzeitmessungen
werden
kontinuierlich
abgetastet
und
in
das
Prozess-
überwachungsmodul eingegeben, wo ein temporärer Datenpuffer
zugewiesen ist, um diese Daten nach Bedarf zu speichern.
Auf der Grundlage der Echtzeitmessungen wird der aktuelle
Prozesszustand,
entweder
der
Hochfahrvorgang
oder
der
Laufzeitvorgang, bei 142 bestimmt. Wenn sich der Prozess im
Zustand des Hochfahrvorgangs befindet, und nur dann, können
- 33 -
die folgenden Berechnungen ausgeführt werden.
Falls dies der Fall ist, werden die erfassten Messdaten
zuerst
mit
ihren
jeweiligen
akzeptierbaren
Bereichen
geprüft, und alle ungültigen Messwerte werden bei 144 als
"fehlend" gekennzeichnet. Falls fehlende Daten entweder in
der Gießgeschwindigkeit oder der Breite des
Gießstrangs
festgestellt werden, wird die Berechnung unterbrochen, weil
sie als kritische Variablen für das erfolgreiche Überwachen
eines Hochfahrvorgangs angesehen werden. Andernfalls wird
eines der bei 72 entwickelten MPCA-Modelle 52, abhängig von
der tatsächlichen Breite des Gießstrangs, ausgewählt.
Sobald das ausgewählte Modell in das Prozessüberwachungsmodul geladen wurde, werden die von dem Modell benötigten
Prozessvariablen bei 148 gewählt. Ihre Prozesstrajektorien
vom Beginn des Hochfahrvorgangs bis zur gegenwärtigen Zeit
sind anhand des vorstehend erwähnten Datenpuffers bekannt,
und der Rest der Trajektorien bei künftigen Beobachtungen
wird
bei
150
unter
der
Annahme
vorhergesagt,
dass
die
aktuelle Abweichung von der durchschnittlichen Trajektorie
über
den
Rest
vollständigen,
der
Angießdauer
vorhergesagten
konstant
Trajektorien
bleibt.
Die
ausgewählter
Prozessvariablen werden bei 152 auf der Grundlage der bei
70
bestimmten
nicht
gleichmäßigen
synchronisiert
und
in
gerichtet,
eine
zweidimensionale
um
Bezug
auf
Synchronisationsskalen
die
Stranglänge
Datenmatrix
aus-
Xnew
zu
bilden, wobei das Element Xnew(i, j) den synchronisierten
Wert der Variable i bei der Beobachtung j darstellt.
Xnew
wird
jeder
bei
154
Beobachtung
vorverarbeitet,
um
null
zu
um
jede
zentrieren
Variable
bei
und
die
auf
- 34 -
Einheitsvarianz zu skalieren. Als nächstes entfaltet das
Prozessüberwachungsmodul
die
vorverarbeitete
Datenmatrix
nach demselben Verfahren, das bei 72 beschrieben ist, und
berechnet anschließend bei 156 die Statistiken SPE und HT
unter Verwendung der Ladematrix P in dem ausgewählten MPCAModell. Diese Statistiken liefern Informationen darüber,
wie der vorliegende Hochfahrvorgang von dem Modell statistisch verschieden ist, oder insbesondere darüber, wie der
normale Hochfahrvorgang durch das Modell charakterisiert
wird, und wie daher der Zustand der Gießmaschine abgeleitet
wird.
Bei 157 wird, falls entweder die SPE- oder die HT-Statistik
eines neuen Hochfahrvorgangs ihre Kontrollgrenze über 3
aufeinander folgende Abtastintervalle übersteigt, ein Alarm
erzeugt, um einen bevorstehenden Angussdurchbruch oder eine
abnorme Situation anzugeben. Ein HT-Alarm impliziert, dass
der
vorliegende
Hochfahrvorgang
von
dem
Normalbetriebs-
bereich abweicht und möglicherweise ein Angussdurchbruch
auftreten kann. Dagegen gibt ein SPE-Alarm an, dass die
inhärente Korrelation innerhalb der ausgewählten Prozessvariablen durchbrochen wurde und ein Angussdurchbruch sehr
wahrscheinlich
ist.
Diese
beiden
Alarmtypen
können
individuell erzeugt werden, oder, was in den meisten Fällen
der Fall ist, gemeinsam erzeugt werden. In dem Fall von
SPE- und/oder HT-Alarmen wird eine bestimmte Anzahl von
Prozessvariablen auf der Grundlage ihrer Beiträge zur SPEund/oder HT-Statistik bei 158 als die wahrscheinlichsten
Grundursachen für den vorhergesagten Durchbruch identifiziert.
Sowohl
die
Alarme
als
auch
ihre
identifizierten
Grundursachen werden bei 160 zu einer HMI 54 gesendet, um
Bediener zu benachrichtigen, so dass sie in der Lage sind,
- 35 -
die
bereitgestellten
weitere
Diagnose
Informationen
vorzunehmen
auszunutzen,
oder
eine
um
eine
korrigierende
Entscheidung zu treffen, um das tatsächliche Auftreten des
vorhergesagten Durchbruchs zu verhindern.
Am Ende jedes Hochfahrvorgangs werden die Kontrollgrenzen
von SPE und HT und ihre Beiträge bei 162 online aktualisiert.
Ein Computersystem 168 ist für die Online-Implementation
des
Systems
zum
Hochfahrvorgangs
bemerkt,
dass
Überwachen
ausgelegt.
vier
des
Mit
Stranggießmaschinen-
Bezug
vernetzte
auf
Computer
Figur
12
sei
folgendermaßen
konfiguriert sind:
Ein Datenkommunikationsserver 170 ist mit programmierbaren
Logiksteuereinrichtungen
(PLC)
178
verbunden,
welche
anderen Computern Echtzeit-Prozessdaten zuführen,
ein Rechenserver 172 ist in der Lage, die Echtzeitdaten
über
die
die
Datenkommunikations-Schnittstelle
MPCA-Berechnung
auszuführen
und
die
zu
empfangen,
alarmbezogenen
Informationen zur HMI-Maschine zu senden und gleichzeitig
die
Echtzeitdaten
für
Datenarchivierungszwecke
zu
einer
Prozessgeschichtsdatenbank 176 zu senden,
ein HMI-Computer 174, der sich in der Steuerkanzel 175 der
Gießmaschine
Bedingungen
befindet,
des
ist
in
der
Hochfahrvorgangs
Lage,
auf
der
die
aktuellen
Grundlage
der
bereitgestellten SPE- und HT-Statistiken und der identifizierten wahrscheinlichsten Grundursachen für einen vorhergesagten Durchbruch anzuzeigen, über einen bevorstehenden
- 36 -
Angussdurchbruch oder eine abnorme Situation zu alarmieren
und
Bediener
173
dabei
zu
unterstützen,
eine
richtige
Entscheidung vorzunehmen, wenn ein Alarm erzeugt wird,
eine
Prozessgeschichtsdatenbank
Prozessgeschichtsdaten
zu
176
speichern,
wird
konfiguriert,
welche
verwendet
werden, wenn die MPCA-Modelle neu gebildet werden müssen.
Zusätzlich ist ein Entwicklungscomputer 180 erforderlich,
um offline die MPCA-Modelle zu entwickeln, wie auch in
Figur 12 dargestellt ist.
Der Fachmann wird verstehen, dass das vorstehend erwähnte
Computersystem unter verschiedenen Umständen variieren kann
und dass beispielsweise ein kundenspezifisch ausgelegtes
Datenerfassungssystem verwendet werden kann, um den Datenkommunikationsserver zu ersetzen, oder dass die Anzeigefunktion in der HMI-Maschine in den Rechenserver integriert
werden kann, usw. Daher ist diese Erfindung nicht darauf
beschränkt.
Wie angegeben, gibt es eine Anzahl von Merkmalen in dem
Online-System, die neu und bei der Verwirklichung eines
solchen Systems nicht offensichtlich sind. Diese Merkmale
werden in dem nachstehenden Text detaillierter beschrieben.
Bestimmen des Prozesszustands
Wie
zuvor
beschrieben
wurde,
folgt
in
einer
Strang-
gießmaschine ein langfristiger Laufzeitvorgang häufig einem
Hochfahrvorgang.
Eines
der
für
das
Online-System
ent-
wickelten Merkmale ist die Fähigkeit des Überwachens sowohl
- 37 -
des Hochfahrvorgangs als auch des Laufzeitvorgangs in einem
integrierten Computersystem. Dafür muss dieses Computersystem
in
der
Lage
sein,
den
aktuellen
Zustand
des
Prozesses, entweder beim Hochfahrvorgang oder beim Laufzeitvorgang, auf der Grundlage der verfügbaren Echtzeitdaten zu bestimmen und automatisch das geeignete Modell und
geeignete
Berechnungsmodule
für
die
Prozessüberwachung
auszuwählen. Gemäß einer nachstehend beschriebenen bevorzugten Ausführungsform dieser Erfindung wird bei 142 in dem
Prozessüberwachungsmodul
für
diesen
Zweck
eine
regel-
basierte Prozesszustands-Bestimmungsfunktion entwickelt.
In Figur 13 sind drei Prozesszustände als Herunterfahrzustand 182, Hochfahrzustand 184 und Laufzeitzustand 186
definiert.
Ein
Ruhezustand
zusätzlicher
188,
ist
Betriebsbedingungen
behandeln.
In
jedem
Systemzustand,
vorgesehen,
oder
um
einige
unbekannte
Zustand
werden
nämlich
spezielle
Situationen
die
ein
zu
entsprechenden
Berechnungen ausgeführt, d.h. es werden MPCA-Berechnungen
an dem Hochfahrzustand ausgeführt, normale PCA-Berechnungen
(von Vaculik u.a. in WO 00/05013 beschrieben) im Laufzeitzustand ausgeführt, und es wird keine Berechnung entweder
im
Herunterfahrzustand
Abhängig
von
aktuellen
oder
im
Ruhezustand
Betriebsbedingungen
ausgeführt.
(durch
die
Gießgeschwindigkeit, die Stranglänge und das StranggießHinweiszeichen,
gießmaschine
wodurch
tatsächlich
angegeben
gießt,
wird,
ob
die
beschrieben),
Strang-
kann
das
System von einem Zustand zu einem anderen übergehen und
daher entweder den Hochfahrvorgang oder den Laufzeitvorgang
überwachen.
In einer normalen Gießsequenz bewegt sich das System von
- 38 -
dem
Herunterfahrzustand
zum
Stranggieß-Hinweiszeichen
Hochfahrzustand,
wahr
wird
und
wenn
die
das
Gieß-
geschwindigkeit größer oder gleich 0,1 m/min ist. Es bewegt
sich
weiter
zum
Laufzeitzustand,
wenn
das
Stranggieß-
Hinweiszeichen wahr bleibt und die Stranglänge 3,2 Meter
übersteigt.
Schließlich
Herunterfahrzustand
bewegt
zurück,
sich
wenn
das
das
System
zum
Stranggieß-Hinweis-
zeichen falsch wird oder die Gießgeschwindigkeit kleiner
als 0,1 m/min ist.
Wenn sich das System im Hochfahrzustand befindet, kann es
sich zum Ruhezustand bewegen, falls fehlende Daten entweder
in der Gießgeschwindigkeit oder der Breite des Gießstrangs
festgestellt werden, oder es kann sich zum Herunterfahrzustand zurück bewegen, falls das Stranggieß-Hinweiszeichen
falsch
wird.
Das
Letztgenannte
geschieht
normalerweise,
wenn ein Angussdurchbruch auftritt.
Wenn sich das System im Laufzeitzustand befindet, kann es
sich
zum
Ruhezustand
bewegen,
falls
einige
spezielle
Betriebsbedingungen angewendet werden, beispielsweise ein
SEN-Wechsel, ein fliegender Tundish-Wechsel, eine Platteneinfügung usw. Falls ein Laufzeit-Gussdurchbruch geschieht,
bewegt sich das System zum Herunterfahrzustand zurück, wie
vorstehend beschrieben wurde.
Wenn sich das System im Ruhezustand befindet, kann es sich
zum Herunterfahrzustand zurück bewegen, falls das Stranggieß-Hinweiszeichen falsch wird. Das System kann sich auch
nach Abschluss der vorstehend erwähnten speziellen Vorgänge
wieder zum Laufzeitzustand bewegen. Zusätzlich kann sich
das
System,
falls
es
infolge
bei
der
Überwachung
des
- 39 -
Hochfahrzustands
festgestellter
fehlender
Daten
in
den
Ruhezustand wechselt, zum Laufzeitzustand bewegen, wenn das
Stranggieß-Hinweiszeichen
wahr
bleibt
und
die
Gieß-
geschwindigkeit größer als 0,7 m/min wird.
Behandeln fehlender oder ungültiger Echtzeitdaten
Fehlende oder ungültige Echtzeitdaten sind ein entscheidender Punkt für den Erfolg der Online-Prozessüberwachung
der
Gießmaschinen-Hochfahrvorgänge.
Gelegentlich
können
Prozesssensoren, wie Thermoelemente, Flussmessgeräte usw.,
aus
irgendwelchen
Gründen
ungültige
Messwerte
erhalten.
Eines der Merkmale, die für das Online-System entwickelt
wurden,
ist
vorgang
die
bei
Fähigkeit,
den
Gießmaschinen-Hochfahr-
Nichtvorhandensein
teilweiser
Echtzeit-
Sensormessungen weiter zu überwachen. Sobald die Messwerte
in das Online-System eingegeben wurden, werden diese Daten
in
Bezug
geprüft,
auf
und
außerhalb
ihre
alle
des
jeweiligen
ungültigen
Bereichs
akzeptierbaren
Messwerte
werden
bei
144
Bereiche
oder
Messwerte
als
"fehlend"
gekennzeichnet. Diese fehlenden Daten werden dann nach den
folgenden Regeln und Verfahren behandelt:
Falls fehlende Daten in der Gießgeschwindigkeit oder der
Breite
des
Gießstrangs
gefunden
werden,
werden
die
fehlenden Daten durch ihren vorhergehenden Wert ersetzt.
Falls der vorhergehende Wert jedoch als "fehlend" gekennzeichnet
ist,
bewegt
sich
das
Überwachungssystem
zum
Ruhezustand, und es wird keine Berechnung ausgeführt, weil
diese
Prozessvariablen
als
kritisch
für
Online-Implementation angesehen werden.
den
Erfolg
der
- 40 -
Falls
fehlende
variablen
Daten
gefunden
in
anderen
werden,
ausgewählten
werden
sie
Prozess-
folgendermaßen
kompensiert:
Bei
der
Trajektoriensynchronisation
synchronisierten
Daten
auf
eine
bei
152
werden
identifizierbare
die
Zahl
gesetzt und als "fehlend" gekennzeichnet, falls sie anhand
fehlender Daten interpoliert wurden,
bei der Modellberechnung bei 156 werden die fehlenden Daten
durch die modellbasierte Schätzung ersetzt, und sie werden
dann
durch
die
Modellberechnungen
geführt,
wobei
der
Schätzalgorithmus als Einzelkomponentenprojektion bezeichnet
wird,
wie
von
Nelson
u.a.
in
Chemometrics
and
Intelligent Laboratory systems, Band 35, 1996 beschrieben
ist.
Vorhersagen und Synchronisieren von Prozesstrajektorien
Beim
Online-System
zum
Überwachen
des
Gießmaschinen-
Hochfahrvorgangs besteht ein anderer entscheidender Punkt
darin,
die
vollständigen,
trajektorien
eines
vordefinierte
Angießdauer
Trajektorien mit
synchronisierten
neuen
dem durch
Hochfahrvorgangs
zu
erhalten,
die
so
Prozessüber
dass
die
diese
MPCA-Modelle charakteri-
sierten normalen Hochfahrvorgang verglichen werden können,
um zu bestimmen, ob ein neuer Vorgang bzw. Betrieb mit
einem normalen Vorgang bzw. dem Normalbetrieb innerhalb der
gesamten Angießdauer statistisch konsistent ist. Wenn sich
ein neuer Hochfahrvorgang entwickelt, verlaufen die verfügbaren Prozesstrajektorien bei jeder Beobachtung jedoch nur
bis zur aktuellen Zeit, und die restlichen Trajektorien von
- 41 -
der
aktuellen
Zeit
Hochfahrvorgangs
an
sind
verfügbar.
nicht
Ein
vor
für
dem
das
Ende
dieses
Online-System
entwickeltes Merkmal ist die Fähigkeit zum Vorhersagen der
Trajektorien in den künftigen Beobachtungen. Der bei 150
gemäß
einer
bevorzugten
Ausführungsform
verwendete
Algorithmus ist durch Nomikos u.a. in Technometrics, Band
37, 1995, beschrieben. Bei diesem Algorithmus werden, wie
in
Figur
14
dargestellt
ist,
die
Trajektorien
bei
den
künftigen Beobachtungen 190, verglichen mit der aktuellen
Trajektorie
gesagt,
192,
dass
die
schnittlichen
auf
der
Grundlage
künftigen
der
Abweichungen
Trajektorien
194,
Annahme
von
welche
vorher-
den
anhand
durchder
historischen Daten in dem Modellsatz berechnet wurden, für
den Rest der Angießdauer bei ihren aktuellen Werten 196
konstant bleiben.
Fachleute werden verstehen, dass die vorstehende Annahme
geändert
werden
kann,
um
den
wirklichen
Prozessablauf
widerzuspiegeln, wobei die Trajektorien in den künftigen
Beobachtungen
beispielsweise
in
manchen
Fällen
direkt
anhand der durchschnittlichen Trajektorien selbst vorhergesagt werden können und noch die annehmbaren Ergebnisse
erzeugen können.
Die vorhergesagten Trajektorien werden dann bei 152 (Figur
11) auf der Grundlage der vorbestimmten nicht gleichmäßigen
Synchronisationsskalen in der Stranglänge synchronisiert,
wie in dem ausgewählten Modell durch 70 (Figur 3) bereitgestellt ist.
- 42 -
Identifizieren der Prozessvariablen als die
wahrscheinlichsten Grundursachen unter Verwendung der
aktuellen Beobachtung
Das Identifizieren der Prozessvariablen als die wahrscheinlichsten
Grundursachen
für
einen
vorhergesagten
Anguss-
durchbruch bei 158 ist ein wichtiges Merkmal beim OnlineSystem zum Überwachen des Gießmaschinen-Hochfahrvorgangs,
weil dadurch wertvolle Informationen bereitgestellt werden
können,
um
Bedienern
zu
helfen,
sich
nur
auf
wenige
Prozessvariablen zu konzentrieren, um eine weitere Diagnose
auszuführen, oder geeignete Steuertätigkeiten vorzunehmen,
um das tatsächliche Auftreten des vorhergesagten Angussdurchbruchs zu verhindern.
Im
Stand
der
Technik
der
multivariaten
statistischen
Prozessüberwachung werden die Ursachen für einen erzeugten
Alarm gewöhnlich durch eine Beitragsdarstellung identifiziert, wodurch der Beitrag jeder in dem Modell enthaltenen
Prozessvariablen
wird,
und
die
zur
SPE-
oder
Prozessvariablen
HT-Statistik
mit
einem
dargestellt
hohen
Beitrag
werden als die wahrscheinlichsten den Alarm hervorrufenden
identifiziert. Solche traditionellen Beitragsdarstellungen
können jedoch darunter leiden, dass eine sehr große Anzahl
von
Prozessvariablen,
die
an
der
MPCA-Modellberechnung
beteiligt sind, auftritt, und sie können nicht für die
Überwachung
sein.
des
Gießmaschinen-Hochfahrvorgangs
Beispielsweise
werden
gemäß
einer
geeignet
bevorzugten
Ausführungsform insgesamt 62 Prozessvariablen ausgewählt,
und die Trajektorie jeder Variablen in der Angießdauer wird
auf der Grundlage der vorbestimmten Synchronisationsskalen
- 43 -
synchronisiert, was zu bis zu 800 Beobachtungen für jede
ausgewählte Variable führt. Daher tragen insgesamt 49600
Modelleingaben
zur
Beitragsauftragungen
Modelleingaben
SPEeiner
stellen
oder
HT-Statistik
solchen
Bedienern
großen
nicht
bei.
Die
Anzahl
von
die
nützlichen
Informationen bereit.
Die Natur dieser Modelleingaben kann jedoch inhärent in
drei Gruppen unterteilt werden, nämlich:
frühere Werte von Prozessvariablen, welche die
Prozess-
änderungen in dem vorhergehenden Zeitraum beschreiben, d.h.
vom Beginn der Angießdauer bis zur aktuellen Zeit,
aktuelle Werte von Prozessvariablen, welche die aktuelle
Situation des Hochfahrvorgangs beschreiben, und
vorhergesagte Werte von Prozessvariablen, welche auf der
Grundlage der bei 150 beschriebenen Annahmen (Figur 11)
vorhersagen, wie sich der Hochfahrvorgang in der Zukunft
entwickeln wird.
Tatsächlich ist das einzige, was Bediener tun können, um
einzugreifen und
das tatsächliche Auftreten des vorher-
gesagten Angussdurchbruchs zu vermeiden, wenn
erzeugt wird, das Ändern der
Daher
muss
die
Grundursache
ein Alarm
aktuellen Prozessvorgänge.
nur
für
die
aktuellen
Beobachtungen identifiziert werden. Überdies kann, falls
eine bestimmte Prozessvariable bei allen normalen Hochfahrvorgängen in dem Modellsatz einen hohen Beitrag zu SPE oder
HT hat, auch erwartet werden, dass sie einen hohen Beitrag
in einem neuen Hochfahrvorgang hat. Falls jedoch ein Alarm
- 44 -
erzeugt
wird,
wird,
und
eine
wenn
ein
neuer
bestimmte
Hochfahrvorgang
Prozessvariable
überwacht
einen
höheren
Beitrag aufweist als gewöhnlich bei den normalen Hochfahrvorgängen, ist sie vermutlich die wahrscheinlichste Grundursache für diesen Alarm. Wenn die Kontrollgrenzen der SPEund HT-Beiträge bei 74 (Figur 3) in Schritt 158 (Figur 11)
einer
bevorzugten
berechnet
wurden,
Ausführungsform
werden
die
dieser
Erfindung
wahrscheinlichsten
Grund-
ursachen für einen erzeugten Alarm als die Prozessvariablen
identifiziert, die das höchste Verhältnis des SPE- oder HTBeitrags
bei
der
aktuellen
Beobachtung
zu
ihrer
entsprechenden Kontrollgrenze haben.
Aktualisieren von Kontrollgrenzen
Gemäß dieser Erfindung bilden die Kontrollgrenzen der SPEund der HT-Statistik und die Beiträge der Prozessvariablen
zur
SPE-
und
Bestimmung,
ob
HT-Statistik
ein
die
Konfidenzintervalle
Hochfahrvorgang
oder
eine
zur
bestimmte
Prozessvariable in ihrem Normalbetriebsbereich liegt. Diese
Kontrollgrenzen
Anzahl
historischer
bekannter
Theorie
werden
auf
der
Grundlage
Betriebsdaten
statt
einer
irgendwelcher
Wahrscheinlichkeitsverteilungsfunktionen
berechnet.
Wenngleich
erwartet
großen
wird,
in
der
dass
die
ausgewählten historischen Daten so viel wie möglich von
einem Normalbetriebsbereich umspannen, können sie infolge
der begrenzten
Größe der verfügbaren historischen Daten
nicht den gesamten Betriebsbereich abdecken. Überdies kann
der Normalbetriebsbereich im Laufe der Zeit von dort, wo er
sich gegenwärtig befindet, abdriften. All diese Gesichtspunkte können zu den berechneten Kontrollgrenzen zu der
Zeit führen, zu der ein Modell gebildet wird, und zu einer
- 45 -
Anzahl falscher oder fehlerhafter Alarme führen, weil das
Modell den aktuellen Normalbetrieb nicht darstellt.
Ein für diese Erfindung entwickeltes Merkmal besteht darin,
diese Kontrollgrenzen bei 162 (Figur 11) auf der Grundlage
der letzten verfügbaren Daten zum Hochfahrvorgang automatisch zu aktualisieren, um den möglichen NormalbetriebsDriftbereich, der nicht von den aktuellen Kontrollgrenzen
erfasst wird, teilweise zu kompensieren. Das Verfahren zum
Online-Aktualisieren der Kontrollgrenzen bei 162 wird nachfolgend detailliert beschrieben.
Sobald die SPE- und die HT-Statistik am Ende der Angießdauer verfügbar werden, was impliziert, dass im aktuellen
Vorgang kein Angussdurchbruch aufgetreten ist, werden sie
untersucht,
um
zu
prüfen,
ob
sie
innerhalb
der
ent-
sprechenden Kontrollgrenzen liegen. Falls entweder die SPEoder die HT-Statistik jenseits ihrer aktuellen Kontrollgrenze liegt, wird keine Kontrollgrenzenaktualisierung auf
der
Grundlage
dieses
Hochfahrvorgangs
ausgeführt,
und
andernfalls werden die Kontrollgrenzen der SPE-Statistik
und der HT-Statistik und ihre Beiträge auf der Grundlage
der
folgenden
Berechnungen
aktualisiert.
In
dem
nachstehenden Text wird die HT-Statistik als ein Beispiel
verwendet, und das gleiche Verfahren kann auf die SPEStatistik
und
die
Beiträge
zur
SPE-
und
HT-Statistik
angewendet werden. Die aktualisierte Kontrollgrenze von HT
bei einer bestimmten Beobachtung wird durch
CLnew = (1 – a) * CLcur + a * {CLcur + r * |HT - CLcur|/
(HT – Clcur) * d}
- 46 -
berechnet, wobei HT die berechnete HT-Statistik bei der
gegebenen Beobachtung in der Angießdauer ist, CLcur bzw.
CLnew die aktuelle Kontrollgrenze bzw. die aktualisierte
Kontrollgrenze
von
HT
bei
dieser
Beobachtung
ist,
der
Parameter a auf 60 % gelegt ist, der Parameter r gleich
95 % ist, falls HT > CLcur ist, oder gleich 5 % ist, falls
HT < CLcur ist, und der Parameter d folgendermaßen anhand
der historischen Daten bestimmt wird:
Es wird angenommen, dass eine Sequenz q die HT-Statistik
bei der gegebenen Beobachtung für alle Hochfahrvorgänge in
dem Modellsatz enthält und alle HT-Statistiken in q in
ansteigender
Reihenfolge
angeordnet
sind,
es
wird
eine
andere Sequenz qdif definiert, um die Differenz jeweils
zweier benachbarter Elemente von q als
qdif = [q(2) – q(1), q(3) – q(2), ..., q(m) – q(m – 1)]
zu berechnen, und es wird dann d als der Mittelwert der
Sequenz qdif berechnet.
INDUSTRIELLE ANWENDBARKEIT
Die
Verwirklichung
eines
Online-Systems
zur
Überwachung
eines Stranggießmaschinen-Hochfahrvorgangs unter Verwendung
multivariater statistischer Modelle des Prozesses macht es
notwendig,
dass
die
vorstehend
beschriebenen
Prozess-
messungen einem Computersystem zur Verfügung stehen. Das
Computersystem
wird
zum
Ausführen
von
MPCA-Berechnungen
verwendet, um einen bevorstehenden Angussdurchbruch vorherzusagen. Gegenwärtig wird das System realisiert.
- 47 -
Die
multivariaten
Grundlage
der
Verwendung
der
statistischen
ausgewählten
Modelle
werden
historischen
MPCA-Technologie
offline
auf
Daten
der
unter
entwickelt.
Die
Modelle werden durch Beurteilen der Rate falscher Alarme,
der Rate fehlerhafter Alarme und der Vorlaufzeit bis zu
einem Durchbruch geprüft, bevor sie online und in Echtzeit
angewendet werden können.
Wenngleich diese Erfindung mit Bezug auf die Vorhersage von
Angussdurchbrüchen
einer
Stranggießmaschine
beschrieben
wurde, ist sie nicht darauf beschränkt. Insbesondere kann
diese Erfindung auf die Vorhersage der bei den anderen
Vorgängen der Gießmaschine, wie einem SEN-Wechsel, einem
fliegenden
Tundish-Wechsel,
einer
Platteneinfügung
usw.,
auftretenden Durchbrüche angewendet werden. Es sei bemerkt,
dass mehrere Veränderungen innerhalb des Schutzumfangs der
anliegenden
Ansprüche
an
der
vorstehend
beschriebenen
Ausführungsform der Erfindung vorgenommen werden können.