Vorlesung Regelungstechnik
Werbung

Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
Steuerung und Regelung
1. Steuerung
1.1. Grundlegende Erläuterungen
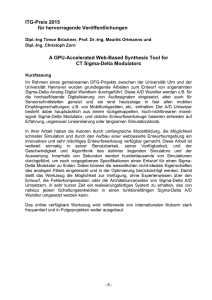
Steuerung des Leonard-Antriebes für die Erläuterung des Begriffes. Leonard-Antrieb
drehzahlgesteuert:
Ziel dieser Anordnung ist es, eine gewünschte Sollgröße Nm (Drehzahl) für den Motor M
bereitzustellen. Durch ein Potentiometer R werden die Thyristoren Th1…Th4 der
Stromrichter-Brückenschaltung über Schaltdauerwinkel α angesteuert. Die Ausgangsspannung
der Stromrichter-Brückenschaltung UF erzeugt den Erregerstrom IF. UF bestimmt über IF die
Ankerspannung des Leonard-Generators und damit die Drehzahl Nm des Motors M. Diese
Wirkungskette bzw. dieser offener Wirkungsablauf charakterisiert den Begriff „Steuerung“.
Die Steuergröße UF (bzw. IF) wird weder gemessen noch rückgekoppelt; d.h. es wird nicht
geregelt. Der Wirkungsablauf der Steuerung ist damit als Kettenreaktion folgender Phasen zu
bezeichnen:
Änderung der Führungsgröße w → Änderung der Stellgröße UF → Änderung der
Ausgangsgröße Nm der Steuerstrecke.
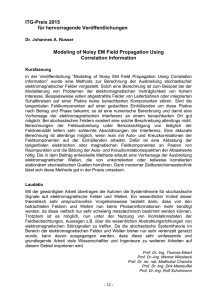
Das Blockschaltbild (Bild 2) zeigt die Steuerkette zur Erläuterung den Begriff „Steuerung“ in
einfacher Form. Als Störgrößen wurden die Spannungs- und Lastschwankung berücksichtigt.
Der Wirkungsablauf ist stets von links nach rechts. Eine Rückkopplung ist in der Steuerkette
nicht erkennbar, d.h. eine Regelung der Steuergröße ist nicht vorhanden.
1
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
2. Regelung
2.1 Grundlegende Erläuterungen
Man spricht von einer „Regelung“ erst dann, wenn trotz Einwirkung von Störgrößen, die
Ausgangsgröße (Regelgröße), die gezielt zu beeinflussende Größe, auf einem vorgegebenen
Wert gehalten wird. Für die Erläuterung des Begriffes wird wiederum der Leonard-Antrieb
drehzahlgeregelt in Bild 3 berücksichtigt.
Das Grundprinzip der Regelung basiert darauf, dass die Regelgröße x mit der Führungsgröße
w verglichen und die gebildete Differenz ∆U=∆xd=xd als Eingangsgröße für das
zwischengeschaltete Stellglied bestimmt wird, die die Regelgröße gezielt beeinflusst. Der
Regler hat die Aufgabe, die Regeldifferenz durch Rückkoppelschleife des Regelkreises auf
Null zu setzen, so dass dann die Führungsgröße gleich der Regelgröße wird.
Führungsgröße = US (Proportional der gewünschten Drehzahl des Motors M)
Regelgröße = UT (Proportional der gemessenen Istgröße der Drehzahl des Motors M)
Der Signalflußplan in Blockschaltbild zeigt Bild 4.
2
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
2.2. Einige Anforderungen an die Regelung
a) Die Störgröße soll im stationären Zustand der Regelung so schnell wie möglich beseitigt werden,
d.h. die Regeldifferenz soll auf Null gesenkt sein (einige Regler sind nicht in der Lage die
Regeldifferenz auf Null zu setzen).
b) Die Regelung muss stabil sein, d.h. die Regelgröße muss auf einen gewünschten Wert konstant
bleiben.
c) Tritt eine neue Führungsgröße auf, so soll der Regler so schnell wie möglich die Regelgröße gleich
der Führungsgröße regeln.
Unter dynamischen Zustand der Regelung versteht man die erste Reaktionsphase der Regelgröße, die
u.a. auch schwankendes Verhalten der Regelgröße aufweisen kann. Beim statischen Verhalten des
Regelkreises ist die Regelgröße konstant und definiert sie die Wunschgröße der Regelung.
2.3. Führungsverhalten des Regelkreises
Ändert sich die Führungsgröße w des Regelkreises, so reagiert die Regelgröße darauf mit einem
Einschwingvorgang in ihrem dynamischen Zustand (Bild 5).
Anregelzeit (bis Toleranzband erreicht wird) → Ausregelzeit (bis Beharrungszustand erreicht wird)
2.4. Störverhalten des Regelkreises
Wirkt eine Störgröße ein, so entsteht ein Schwingvorgang der Regelgröße ich ihrem dynamischen
Zustand. Der Regler hat die Aufgabe, die Störgröße so schnell wie möglich zu beseitigen (Bild 6).
3
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
Bild 5: Führungsverhalten des Regelkreises bei einem Führungssprung (Quelle: Reuter, x m:
Überschwingweite, Tan: Anregelzeit, Taus: Ausregelzeit)
Bild 6: Führungs- und Störverhalten des Regelkreises (Quelle: Berger)
3. Regelkreisberechnung im stationären Zustand
Regelabweichung und Stabilitätsverhalten eines Regelkreises wird im stationären Zustand des
Regelkreises betrachtet. Mit Hilfe des Signalflußplanes können die Zusammenhänge der Regelglieder
untereinander und die auf sie einwirkenden Größen übersichtlich dargestellt werden.
Verstärkung:
Die Verstärkung charakterisiert die Beziehung zwischen der Eingangs- und Ausgangsgröße des
Regelkreises. Sind die Regelkreisglieder hintereinander geschaltet, so erhält man die
Gesamtverstärkung v des Regelkreises durch Multiplikation der Einzelverstärkungsfaktoren
miteinander (Bild 7).
y vR w
x v S y v S v R w vw
mit v v R v S
4
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
Geschlossener Regelkreis ohne Berücksichtigung der Störgrößen
x d w x
y v R x d
x yv S v R v S ( w x) v( w x) mit v v R v S
v
w
1 v
für v1 : x w
x
5
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
Geschlossener Regelkreis mit Berücksichtigung der Störgrößen
yS yR z
x y S v S ( y R z )v S v S (x d v R z ) v S [( w x)v R z ]
vS vR w vR vS x vS z
x(1 v) vw v S z
x
v
1
w
vS z
1 v
1 v
Bild 10 zeigt als Beispiel die Wirkung der Ausgangsgröße (Regelgröße) des geschlossenen
Regelkreises bei Aufschaltung einer Führungs- bzw. Störgröße, die mit Hilfe von einem einfachen
Matlab-Simulink-Programm erstellt wurde. Die Testfunktion der Führungs- und Störgröße ist die
Einheitssprungfunktion der Amplitude 1. Aus den beiden Beispielen ist zu erkennen, dass der Regler
die Aufgabe hat, einerseits die Regelgröße so schnell wie möglich gleich der Führungsgröße zu setzen
und auf der anderen Seite auch so schnell wie möglich die Störgröße zu beseitigen. Die erwähnte
Störgröße ist in den Beispielen nach der dritten Zeiteinheit aufgeschaltet.
Geschlossener Regelkreis: Wirkung der Führungs- und Störgröße (Simulink)
Beispiel 1
6
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
Beispiel
2:
Störsignal
nach dem
30.Impuls
10.5
Führungssignal
Add
s+0.735
1
s
PI-REGLER
PI-REGLER
Add1
1
1
1
s+1
s+2
s+4
PT3-Strecke
PT3-Strecke1
PT3-Strecke2
Bild 10: Sprungantwort bei Führungs- und Störgrößenaufschaltung (Matlab-Simulink)
7
Scope
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
Das folgende Programm (Bild 11) mit Matlab ermittelt die Sprungantwort des Regelkreises mit
Regelkreis-Parameter-Änderungen und hilft denjenigen, der sich mit dem Programm Erfahrung zu
sammeln wünscht.
Programmierung mit MATLAB:
>> F=zpk([],[0 -1 -1/0.2],10)
Zero/pole/gain:
10
------------s (s+1) (s+5)
>> step(feedback (F,1))
>> hold on
>> F=zpk([],[0 -1 -1/0.2],1)
Zero/pole/gain:
1
------------s (s+1) (s+5)
>> step(feedback (F,1))
>> hold on
>> F=zpk([],[0 -1 -1/0.2],3)
Zero/pole/gain:
3
------------s (s+1) (s+5)
>> step(feedback (F,1))
8
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
Step Response
1.5
Toleranzbereich
Amplitude
1
0.5
0
0
2
4
6
8
10
12
14
16
18
20
Time (sec)
Bild 11: Sprungantwort des Regelkreises mit Parameteränderungen (Matlab-Simulink)
4. Mathematische Grundlagen der Regelungstechnik
Für die Untersuchung der Systemregelung sind mathematische Beziehungen sowohl im stationären als
auch im dynamischen Zustand des Prozesses erforderlich. Der dynamische Zustand einer Regelung ist
der Zustand, der sich nach Änderung der externen Größen, wie Stör- und Führungsgröße, die
Regelgröße in Abhängigkeit von der Zeit, bis zu ihrem Beharrungszustand nachvollzieht. Diesen
Zustand nennt man Übergangszustand oder Einschwingvorgang. Der sich nachfolgend erscheinende
Verlauf ist mit der Zeit konstant und wird als stationärer Zustand bezeichnet. Das betrachtete System
verfügt über Gleichungen, die diese Zustände mit ihren Systemgrößen beschreiben. Das sind lineare
und inhomogene Differentialgleichungen (DFGL) n-ter-Ordnung. Linear bedeutet, dass die
Koeffizienten in einem Prozess, wie z.B. Widerstand R, Induktivität L und Kapazität C konstante
Werte aufweisen. Unter Inhomogenität versteht man, dass die aufzulistende DFGL nicht Null sind. Für
die Bestimmung der DFGL sei an folgendem Bespiel eines RLC-Netzwerkes, die Ausgangsgröße zu
bestimmen.
9
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
Beispiel: Bestimmung der Eingangsgröße Uc (Kondensatorspannung) als Funktion der Zeit.
Maschengleichungen:
di (t )
dt
1) Ri (t ) L
u C (t ) u e
der nach der Zeit
abzuleitende
Induktivitätsstrom kann sich nicht
sprunghaft ändern
2)
i (t ) C
du C (t )
dt
die nach der Zeit
abzuleitende
Kondensator spannungkann sich
nicht sprungshaft
ändern
Die Folge daraus:
Ändern sich die äußeren Eingangsgrößen, wie Stör- und Führungsgrößen, so entsteht zunächst als
Größe am Ausgang ein Übergangszustand (Einschwingzustand oder dynamischer Zustand) und
danach folgt der stationäre Zustand (Beharrungszustand oder Endwert).
Fazit:
Ist uC const , so soll im stationären Zustand für den Strom
I stat
di (t )
0 , und daraus folgend
dt
U
gelten. Die Messungen und die mathematische Beziehungen haben gezeigt, dass der Strom
R
nach einer e-Funktion seinem Endwert zustrebt. Demnach gilt, dass sich die Lösung der DFGL sich
aus einem e-Funktionswert und einer Konstante zusammensetzt. Setzt man die obige 2.Gleichung in
die obige 1. Gleichung ein, so folgt:
RC
du C (t )
d du (t )
L C C u C (t ) u e
dt
dt
dt
LC
d 2 u C (t )
du (t )
RC C u C (t ) u e lineare inhomogene DFGL 2.Ordnung
2
dt
dt
10
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
Lösung der DFGL mit Hilfe der Laplace-Transformation unter Berücksichtigung des formalen
Überganges:
d
j s
dt
LCs 2U C ( s ) RCsU C ( s) U C ( s ) U e ( s)
U C ( s ) U e( s )
1
LCs RCs 1
U C ( s ) LCs 2 RCs 1 U e ( s )
2
Testfunktion ist der Einheitssprung u e (t ) 1 am Eingang. Nach der Korrespondententabelle der
Laplace-Transformation gilt: U e ( s )
1
. Damit lautet die Beziehung:
s
1
1
2
s LCs RCs 1
1
1
U C (s)
1
LC 2 R
s s s
L
LC
U C (s)
Für die Laplace-Rücktransformation gilt wiederum nach der Laplace-Korrespondenztabelle:
F(s)
f(t)
1
s ( s s 2 2 )
2
s
s
1
1 2 e s1t 1 e s2t
2
2w
2w
für D
1
1 cos t sin t e t
2
w 2 2,
1
für D
1
2 2 , s1, 2 w j
Für die rechnerische Ermittlung der Ausgangsgröße wird angenommen:
R=1 Ω, L=1000 mH und C=5.700 F.
Demnach gilt für die Ausgangsgröße im Zeitbereich:
11
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
R 1
1 0,5
L 1
1
1
2
0,17 0,41
LC 1 * 5,7
2
D
1
Danach ist die obere Beziehung in der Korrespondenztabelle anzuwenden:
w 2 2 0,28
s1 w 0,22
s 2 w 0,91
s
s
1
1 2 e s1t 1 e s2t
2
2w
2w
1
0,91 0, 22*t 0,22 0,91*t
1
e
e
0,17 2 * 0,28
2 * 0,28
u c (t )
5,88 1 1,62e 0, 22*t 0,39e 0,91*t
Bild 12 zeigt die Sprungantwort des Netzwerkes.
5
4
3
2
1
0
-1
-2
0
20
40
60
80
100
120
Bild 12: Sprungantwort des RLC-Netzwerkes
5. Übergangsfunktion
Die
linearen
und inhomogenen DFGL charakterisieren
das
dynamische
Regelkreisgliedern. Hierbei werden die DFGL nach der Ausgangsgröße
Verhalten von
xa (t ) u (t ) der
Regelkreisglieder bei einer Testfunktion als Eingangsgröße aufgelöst. Bei der folgenden Analyse von
Verhalten der Regelkreisglieder wird nur die Einheitssprung am Eingang als Testfunktion in Betracht
gezogen. Die Testfunktion (Bild 13) wird beschrieben durch die Beziehung:
12
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
0 für t 0
u e (t )
1 für t 0
u e (t ) (t ) 1
Bild 13: Einheitssprung als Testfunktion
Die Ausgangsgröße bei der Testfunktion als Einheitssprung wird als Übergangsfunktion u (t )
bezeichnet.
Übergangsfunktionen einiger Regelkreisglieder:
u a (t ) kue (t )
P-Glied
I-Glied
T
du a (t )
u e (t )
dt
t
1
u a (t ) u e (t )dt
T 0
1
PI-Glied
T
du a (t )
du (t )
k ue T e
dt
dt
k
u a (t ) u e (t )dt k
T
1
13
1
1
1dt t
T 0
T
k
tk
T
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
6. Frequenzgang
Vorgehensweise und Bedeutung für die Umwandlung von DFGL in Frequenzganggleichungen:
Bereits wurde schon in den anderen Abschnitten erwähnt, dass der Zusammenhang zwischen
Eingangs- und Ausgangsgröße eines linearen, inhomogenen Regelkreisgliedes durch lineare DFGL nter Ordnung zu charakterisieren ist. Es wurde auch zum bemerkt, dass am Eingang des
Regelkreisgliedes einfachheitshalber die Sprungfunktion mit der Amplitude 1 als Testfunktion zu
berücksichtigen ist. Um die Bedeutung der Umwandlung von linearen DFGL in
Frequenzganggleichungen besser zu verstehen wird die Vorgehensweise so erläutert, dass aber hier,
und zwar nur bei dieser Betrachtung, ein sinusförmiger Verlauf berücksichtigt wird.
Eingangsgröße: u e (t ) uˆ e sin( t )
Ausgangsgröße: u a (t ) uˆ a sin( t )
Die Ausgangsgröße eines linearen, inhomogenen Regelkreisgliedes ist auch sinusförmig mit der
u e (t )
Amplitude û a , und ist gegenüber der Eingangsgröße
um den Phasenwinkel
phasenverschoben. Wegen der einfachen mathematischen Behandlung werden die harmonischen
Schwingungen in der komplexen Schreibweise durchgeführt.
u e (t ) uˆ e e jt
u a (t ) uˆ a e j (t )
Zusammenhang zwischen den Schreibweisen:
Beispiel:
Beispiel:
e jt cos t j sin t
sin( 45) j cos( 45)
0.707 j 0.707 1
sin( 45) 1
14
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
Hat man die DFGL eines Regelkreises und setzt man die komplexe Schreibweise in die DFGL ein, so
erhält man die Frequenzganggleichungen.
Beispiel: Allgemeine Schreibweise linearer, inhomogener DFGL n-ter Ordnung:
(n)
u a a1u a a 2 ua ... a n u a kue
uˆ a e j (t ) a1uˆ a e j (t ) j a 2 uˆ a e j (t ) ( j ) 2 ... a n uˆ a e j (t ) ( j ) n kuˆ e e jt
2
n
uˆ a e j (t ) 1 a1 j a 2 j ... a n j kuˆ e e jt
Setzt man für die komplexe Größe die Laplace Variable ein j s , so folgt:
uˆ a e j (t ) 1 a1 s a 2 s 2 ... a n s n kuˆ e e jt
Berücksichtigt man die komplexe Schreibweise, so wird aus der Gleichung:
u e (t ) uˆ e e jt
u a (t ) uˆ e e j (t )
U a ( s ) 1 sa1 s 2 a 2 ... s n a n kU e ( s )
Damit wird die Gleichung des Frequenzganges ermittelt:
F ( s)
U a ( s)
k
.
2
U e ( s) 1 sa1 s a2 ... s n an
In der Gauß’schen Zahlenebene wird der Frequenzgang F(s) durch die Ortskurve dargestellt. Dabei
gilt für jeden Punkt der Ortskurve ein Zeiger mit der Länge |F(s)| und dem Phasenwinkel φ(ω) gegen
die reelle positive Achse. Demnach lässt sich die Gleichung für den Frequenzgang durch die
Beziehung
F ( s)
U a ( s)
F ( s) e j ( ) umformen. Unter Berücksichtigung der komplexen
U e ( s)
Schreibweise gilt:
F ( s)
u a uˆ a e j (t )
uˆ
a
jt
ue
uˆ
uˆ e e
e
Länge
der Zeiger
j
.
e
ist
die Phase
Bemerkung: Eingangssignal ist eine harmonische Schwingung
Ableitung des Frequenzganges aus der DFGL:
Es gilt generell der formale Übergang
d
j s . [ bedeutet „an Stelle von“]. Folgend lässt
dt
sich damit einsetzen:
15
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
d2
( j ) 2 s 2
dt 2
dn
( j ) n s n
n
dt
usw.
Der Nenner des abgeleiteten Frequenzganges
F ( s)
U a ( s)
k
2
U e ( s) 1 sa1 s a 2 ... s n a n
charakteristische
Gleichung
ist die charakteristische Gleichung des Frequenzganges. Die charakteristische Gleichung wird gleich
Null gesetzt und die s-Größen werden ermittelt. Die bisher behandelten Sachverhalte werden anhand
eines Beispiels (Bild 14) RC-Tiefpass detailliert behandelt.
Bild 14: Tiefpass
u (t ) u C (t ) u R (t )
u C (t ) i (t ) R
mit
i(t ) C
duC (t )
.
dt
Damit wird:
du C (t )
DFGL 1.Ord.
dt
U(s) U C ( s )1 Ts mit T RC
u (t ) u C (t ) RC
1
1 Ts
1 1
U C (s)
s 1 Ts
1
1
1
T
s s
T
U C (s) U (s)
16
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
Nach der Korrespondenztabelle gilt dann für die Sprungantwort:
u C (t ) 1 e
t
T
Den Frequenzgang (Amplituden- und Phasengang) erhalten wir aus der Übertragungsfunktion in der
komplexen Darstellung wie folgt:
F ( j )
F ( j )
u C ( j )
1
u ( j ) 1 j T
1
1 T
2
.
F ( j ) dB 20 log 1 20 log 1 T
2
0
20 log 1 T
2
Für den Phasengang ist der Real- und Imaginärteil der Übertragungsfunktion zu bestimmen. Hierfür
wird die Übertragungsfunktion konjugiert komplex erweitert.
F ( j )
u C ( j )
1
1 j T
1 j T
1
T
j
2
2
2
u ( j ) 1 jT 1 jT 1 T
1 T
1 T
arctan
ω
0
1/T
∞
Re
ImF ( j )
arctan( T )
ReF j
|F(jω)|dB
0
-3 dB
-∞
φ
0
-45°
-90°
Re{F(jω)}
1
0,5
0
Im{F(jω)}
0
-0,5
0
Beispiel: Frequenzgang (Amplituden- und Phasengang, Bode-Diagramm):
Matlab-Simulink-Programm:
>> F0=tf([0 1],[0.3 1])
Transfer function:
1
--------0.3 s + 1
>> bode(F0)
>> grid
>> step(F0)
17
Im
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
>> grid
>> nyquist(F0)
>> grid
Bode-Diagramm:
Bode Diagram
0
Magnitude (dB)
-5
-10
-15
-20
-25
Phase (deg)
-30
0
-45
-90
-1
0
10
1
10
2
10
10
Frequency (rad/sec)
Sprungantwort
Step Response
1
0.9
0.8
0.7
Amplitude
0.6
0.5
0.4
0.3
0.2
0.1
0
0
0.2
0.4
0.6
0.8
1
1.2
Time (sec)
18
1.4
1.6
1.8
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
Ortskurve:
Nyquist Diagram
0.5
6 dB
4 dB 2 dB 0 dB -2 dB-4 dB
-6 dB
0.4
-10 dB
10 dB
0.3
Imaginary Axis
0.2
20 dB
0.1
-20 dB
0
-0.1
-0.2
-0.3
-0.4
-0.5
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Real Axis
Korrespondenztabelle
Nr.
1
F(s)
2
3
4
5
f(t)
1
1
s
1
sn
t n 1
(n 1)!
e at
1
sa
1
s( s a)
s
2
s 2
1
1 e at
a
cos t
sin t
s 2
1
( s )( s )
e t e t
8
1
;n 0
(s ) n
t n 1 t
e
(n 1)!
9
1
s(s ) n
6
2
7
1 n 1 t
1
n 0 !
19
t
e
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
10
1 s1t
e e s2t für D 1
2w
1
s s 2 2
2
1
e t sin t für D
1
Es gilt :
w 2 2 ; 2 2 ; s1, 2 w j
11
1
s1e s1t s2 e s2t für D 1
2w
s
s s 2 2
2
e t cos t sin t für D 1
Es gilt :
w 2 2 ; 2 2 ; s1, 2 w j
12
1
s s s 2 2
2
s
s
1
1 2 e s1t 1 e s2t für D 1
2
2w
2w
1
1 cos t sin t e t für D 1
2
Es gilt :
w 2 2 ; 2 2 ; s1, 2 w j
13
14
15
1
s
1
s2
1
s a
1
t
te at
2
16
a
s s a
1 e at
17
a2
s 2 s a
at 1 e at
20
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
Tabelle der wichtigsten Regelkreisglieder
Reg.
DFGL
Kreis- Übertrag.
glied Fkt.
P
u a (t ) k p u e (t )
Bode-Diagr.
Sprungantw.
Ortskurve
Bode Diagram
7.5
U (s)
F (s) a
kp
U e (s)
Magnitude (dB)
7
6.5
6
5.5
5
1
Phase (deg)
0.5
0
-0.5
-1
0
1
10
10
Frequency (rad/sec)
Step Response
3
2.8
2.6
2.4
Amplitude
2.2
2
1.8
1.6
1.4
1.2
1
0
0.2
0.4
0.6
0.8
1
Time (sec)
Nyquist Diagram
1
0.8
2 dB
0 dB -2 dB
4 dB
-4 dB
-6 dB
0.6 6 dB
Imaginary Axis
0.4 10 dB
0.2
-10 dB
20 dB
-20 dB
0
-0.2
-0.4
-0.6
-0.8
-1
-1
-0.5
0
0.5
Real Axis
21
1
1.5
2
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
T1u a (t ) u a (t ) k p u e (t )
Bode Diagram
0
Magnitude (dB)
kp
U ( s)
F ( s) a
U e ( s) 1 sT1
-10
-20
-30
Phase (deg)
-40
0
-45
-90
-1
0
10
1
10
2
10
10
Frequency (rad/sec)
Step Response
1
0.9
0.8
0.7
Amplitude
0.6
0.5
0.4
0.3
0.2
0.1
0
0
0.5
1
1.5
2
2.5
3
Time (sec)
Nyquist Diagram
0.5
64dB
dB2 dB0 dB
-2 dB
-4 dB
0.4
-6 dB
-10 dB
10 dB
0.3
0.2
Imaginary Axis
PT1
0.1
20 dB
-20 dB
0
-0.1
-0.2
-0.3
-0.4
-0.5
-1
-0.5
0
Real Axis
22
0.5
1
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
T22 ua (t ) T1u a (t ) u a (t ) k p u e (t )
U a ( s)
U e ( s ) 1 sT1 s 2T22
Magnitude (dB)
0
-20
-40
-60
-80
0
Phase (deg)
-45
-90
-135
-180
-1
0
10
1
10
2
10
10
Frequency (rad/sec)
Step Response
1.6
1.4
1.2
1
Amplitude
F (s)
Bode Diagram
20
kp
0.8
0.6
0.4
0.2
0
0
5
10
15
Time (sec)
Nyquist Diagram
3
0 dB
-2 dB
2 2 dB
1
Imaginary Axis
PT2
4 dB
-4 dB
6 dB
-6 dB
10 dB
20 dB
-10 dB
-20 dB
0
-1
-2
-3
-1.5
-1
-0.5
0
0.5
Real Axis
23
1
1.5
2
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
u a (t ) k I u e (t )dt
U a (s) k I
U e (s)
s
Magnitude (dB)
0
-5
-10
-15
-20
-89
Phase (deg)
-89.5
-90
-90.5
-91
0
1
10
10
Frequency (rad/sec)
Step Response
1600
1400
1200
1000
Amplitude
F (s)
Bode Diagram
5
800
600
400
200
0
0
500
1000
1500
Time (sec)
Nyquist Diagram
10
0 dB
8
6
4
Imaginary Axis
I
-2 dB
-4 dB
-10 dB -6 dB
2 2 dB
4
610dB
dB
dB
0
-2
-4
-6
-8
-10
-1
-0.8
-0.6
-0.4
-0.2
Real Axis
24
0
0.2
0.4
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
D
u a (t ) k D u e (t )
Bode Diagram
U (s)
F (s) a
sk D
U e (s)
20
Magnitude (dB)
15
10
5
0
-5
91
Phase (deg)
90.5
90
89.5
89
0
1
10
10
Frequency (rad/sec)
Nyquist Diagram
10
0 dB
8
6
Imaginary Axis
4
-2 dB
-4 dB
-10 dB -6 dB
2 2 dB
4
610dB
dB
dB
0
-2
-4
-6
-8
-10
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
Real Axis
u a (t ) k p u e (t ) k I u e (t )dt
Bode Diagram
30
Magnitude (dB)
1
k p u e (t ) u e (t )dt
Tn
U ( s)
1
F (s) a
k p 1
U e ( s)
sTn
20
10
0
-10
0
Phase (deg)
PI
-45
-90
-1
10
0
10
25
1
10
Frequency (rad/sec)
2
10
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
Step Response
1600
1400
1200
Amplitude
1000
800
600
400
200
0
0
500
1000
1500
Time (sec)
Nyquist Diagram
10
0 dB
8
6
Imaginary Axis
4
-2 dB
2 2 dB
4
610dB
dB
dB
0
-4 dB
-10 dB -6 dB
-2
-4
-6
-8
-10
-1
-0.5
0
0.5
1
Real Axis
u a (t ) k p u e (t ) k D u e (t )
k p u e (t ) TV u e (t )
U a (s)
k p 1 sTV
U e (s)
Magnitude (dB)
F ( s)
Bode Diagram
50
40
30
20
10
90
Phase (deg)
PD
45
0
-1
10
0
10
26
1
10
Frequency (rad/sec)
2
10
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
Nyquist Diagram
80
0 dB
60
40
Imaginary Axis
20
-2 dB
2 dB
0
-20
-40
-60
-80
-1
0
1
2
3
4
5
Real Axis
1
u a (t ) k p u e (t ) u e (t )dt TV u e (t )
Tn
50
Magnitude (dB)
U (s)
1
F (s) a
k p 1
sTV
U e (s)
sTn
Bode Diagram
60
40
30
20
10
0
90
Phase (deg)
45
0
-45
-90
-2
-1
10
0
10
1
10
2
10
10
Frequency (rad/sec)
Nyquist Diagram
30
0 dB
20
10
Imaginary Axis
PID
0
2
4
dB
6 dB
-2 dB
-6 dB-4 dB
-10
-20
-30
-1
-0.5
0
0.5
1
Real Axis
27
1.5
2
2.5
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
7. Zusammensetzung von Übertragungsgliedern
Alle Übertragungsglieder eines Regelkreises und damit auch der Regelkreis selbst lassen sich
mathematisch durch DFGL n-ter Ordnung beschreiben. Die DFGL charakterisieren das dynamische
und das statische Verhalten eines Übertragungsgliedes und damit des Regelkreises. Die Strukturbilder
von Übertragungsgliedern stellen die symbolischen Darstellungen mit der Kennzeichnung Ein- und
Ausgangsgrößen und Signalwirkungen dar. Theoretisch werden die Übertragungsglieder durch Blöcke
mit ihren Übergangsfunktionen in diesen Blöcken schematisch präsentiert.
Übertragungsglieder (tabellarisch)
Bezeichnung
Strukturbild
P
I
D
PT1
PT2
28
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
Bezeichnung
Strukturbild
PT2
DT1
Tt
PD
PI
PID
29
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
8. Zusammensetzung von Übertragungsgliedern
U a F1F 2U e
U a F U e1 U e 2
U a U e1 F U e 2
U a U e F1 U e F 2
U a F1U e U a F 2
30
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
Zerlegungen von kombinierten Übertragungsgliedern
PI-Glied in P- und I-Glied
1 sTn
1
U a ( s) K p
Ue K p
U
TI e
sTn
s
K p
PD-Glied in P- und D-Glied
U a ( s) K p (1 sTv )U e ( K p sK p TD )U e
31
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
9. Stabilität
Je nachdem um was für ein lineares Übertragungsglied handelt, an seinem Eingang mit der
Testfunktion als Sprungfunktion aufgeschaltet ist, tritt an dessen Ausgang y(t)
Einschwingvorgangsgröße folgender Art auf.
Weist ein Übertragungsglied, beim Aufschalten eines Testsignals (Sprungfunktion) an dessen
Eingang, ein Ausgangssignal y(t) auf, das mit der Zeit einen festen Endwert hat, so spricht
man von einem stabilen Übertragungsglied (bzw. System). Anderenfalls ist das
Übertragungsglied nicht stabil.
32
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
Stabilitätsuntersuchung
Beispiel
Übertragungsfunktionen der Übertragungsglieder:
F1 ( s )
K1
1 sT1
F2 ( s ) K 2
Gesamtübertragungsfunktion:
W (s) X (s) F2 (s)F1 (s) X (s)
K1
F1 ( s)
1 sT1
K1
K1
X (s)
F ( s)
K1
W ( s) 1 F1 ( s) F2 ( s)
1 sT1 K1 K 2 1 sT1 V0
1 K2
1 sT1
V0 K1 K 2
Mit V 0 : Verstärkungsfaktor; T1 : Zeitkonstante; K1 , K 2 : Verstärkungsfaktoren von beiden
Übertragungsgliedern (variabel).
Die zugehörige Differentialgleichung (DFGL) lautet:
w(t ) K1 x (t )T1 x(t )(1 V0 )
33
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
Sprungantwort:
F (s)
K1
X ( s)
W ( s ) 1 sT1 V0
X(s)
K1
K
1
1
1
s 1 sT1 V0 T1 1 V0
s s
T1
Nach der Korrespondenztabelle gilt:
1
1
1 e at
ss a
a
Demnach ergibt sich die Sprungantwort im Zeitbereich zu
K T1
x(t ) 1
T1 1 V0
1V0
t
1 e T1 K1
1 V0
1V0
t
1 e T1 .
Annahme:
K1 K 2 0,8
T1 1,2
Sprungantwort mit MATLAB:
Step Response
2.5
2
Amplitude
1.5
1
0.5
0
0
2
4
6
8
10
Time (sec)
34
12
14
16
18
20
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
Bode-Diagramm:
Bode Diagram
Magnitude (dB)
10
0
-10
-20
Phase (deg)
-30
0
-45
-90
-2
-1
10
0
10
1
10
10
Frequency (rad/sec)
Ortskurve:
Nyquist Diagram
1.5
2 dB
0 dB
-2 dB
-4 dB
1
4 dB
-6 dB
6 dB
0.5
-10 dB
Imaginary Axis
10 dB
20 dB
-20 dB
0
-0.5
-1
-1.5
-1
-0.5
0
0.5
1
Real Axis
35
1.5
2
2.5
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
Analyse für die Stabilität:
Fall 1: K1 K 2 V0 1
F ( s)
K1
K1
X ( s)
. VZ1-Glied mit einem stabilen Verhalten.
W ( s) 1 sT1 V0 1 sT1
Fall 2: K1 K 2 V0 1
Die 1 ist gegenüber K1 K 2 V0 1 zu vernachlässigen!
X(s)
K
1 K1
1
1
s sT1 V0 T1 V0
s s
T1
Nach der Korrespondenztabelle gilt:
K T
x(t ) 1 1
T1 V0
V
V0
0 t
1 e T1 K1 1 e T1 t 1
V0
K2
V0
t
1 e T1 .
Sprungantwort:
6
8
Step Response
x 10
7
6
Amplitude
5
4
3
2
1
0
0
5
10
15
20
25
Time (sec)
36
30
35
40
45
50
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
Hier haben wir mit einem instabilen Verhalten der Anordnung zu tun. Mit steigender
Frequenz weist die Sprungantwort keinen stationären Wert (ohne Ausgleich).
Fall 3: K1 K 2 V0 1
F ( s)
K1
K
K 1
X ( s)
1 1 . Das ist die Übertragungsfunktion eines I-Gliedes.
W (s) 1 sT1 V0 sT1 T1 s
Die Sprungantwort weist ein nicht stabiles Verhalten auf.
Step Response
1200
1000
Amplitude
800
600
400
200
0
0
500
1000
1500
Time (sec)
Da die Stabilitätsuntersuchung nach der obigen Methode etwas umfangreiche Methodik
darstellt, ist die Anwendung der alternativen Nyquist-Methode für diesen Zweck sehr
hilfreicher. Nyquist hat die Analyse der Ortskurvenkennlinie von einem offenen Regelkreis
zur Bestimmung des Stabilitätsverhaltens von geschlossenen Regelkreisen untersucht. Die
Voraussetzung dafür wird festgelegt:
Grad von Z > Grad von N der Übertragungsfunktion.
Weist der offene Regelkreis nach der Anwendung der Nyquist-Kriterien auf der Ortskurve ein
stabiles Verhalten auf, so ist der geschlossene Regelkreis stabil (siehe Bild unten).
Regel von Nyquist:
Der geschlossene Regelkreis ist stabil, wenn die Ortskurve des Frequenzganges F(s) des
offenen Kreises den Punkt -1 weder durchdringt noch umschlingt.
37
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
Offener Regelkreis
Geschlossener Regelkreis
Fges
Fges F1 F2
F1
1 F1 F2
Beispiel:
Nyquist Diagram
Nyquist Diagram
0.4
30
-10 dB
10 dB 6 dB 4 dB2 dB 0 dB-2 dB-4 dB-6 dB
0.3
20
0.2
20 dB
10
-20 dB
Imaginary Axis
Imaginary Axis
0.1
0
-0.1
0
-10
-0.2
-20
-0.3
-0.4
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
-30
-10
0.8
Real Axis
-5
0
5
10
15
20
25
Real Axis
Solange der Kurvenverlauf den -1 Grenzwert auf der reellen Achse nicht umschlingt, handelt
es sich dabei um ein stabiles Verhalten der Anordnung (Bild links). Ist die -1 Grenze auf der
reellen Achse durch die Kurvenform umhüllt, so spricht man vom instabilen Verhalten des
gegebener Struktur (Bild rechts).
38
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
Auch das Frequenzgang-Kennlinienverfahren trägt bei der Untersuchung des
Stabilitätsverhaltens von linearen Systemen bei. Die Anwendung des Verfahrens erfordert den
Amplituden- und Phasengang (Bodediagramm)
j
F ( s ) F ( s ) e
.
Phase
Betrag
Der Betrag F (s) ist eine Funktion von s j . Demnach sind sowohl der Amplituden- als
auch der Phasengang des Frequenzganges Funktionen der Kreisfrequenz ω, und werden über
der mit einem logarithmischen Maßstab versehenen ω-Achse aufgetragen.
Erläuterung:
P-Glied
Frequenzgang: F ( j ) k
Betrag: F ( j) k → F ( j ) 20 log k
Phase: arctan
ImF ( j )
0
arctan 0
ReF ( j
k
I-Glied
Frequenzgang: F ( j )
Betrag: F ( j )
1
1
j
jT
T
1
1
→ F ( j ) 20 log
T
T
39
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
Phase: arctan
ImF ( j )
T
arctan
arctan( ) 90
ReF ( j
0
D : Durchtrittsfrequenz. Sie ist die Frequenz, bei der die Betragskennlinie des Amplitudenganges des
offenen Kreises durch die 0-dB-Linie geht.
PI-Glied
Frequenzgang: F ( j ) k
1
1 jT
1
k
1 k 1 j
jT
T
jT
1
Betrag: F ( j ) k 1
T
Phase: arctan
2
1
→ F ( j ) 20 log k 20 log 1
T
ImF ( j )
1
arctan
ReF ( j
T
Bode Diagram
50
Magnitude (dB)
40
30
20
3dB
10
Phase (deg)
0
0
-45
-90
-2
10
-1
10
0
1
10
10
Frequency (rad/sec)
40
2
10
2
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
Nun können wir die Stabilitätsuntersuchung nach dem Bode-Diagramm, durch Anwendung des
Nyquist-Kriteriums anwenden. Der geschlossene Regelkreis wird als stabil bezeichnet, wenn bei der
Durchtrittsfrequenz die Phasenkennlinie des offenen Kreises oberhalb von -180° verläuft.
Regler-Daten und weitere Bemerkungen:
P-Regler: relativ schnell, geringe Genauigkeit
I-Regler: langsam, gute Genauigkeit
PI-Regler: schnell, gute Genauigkeit
PD-Regler: sehr schneller, geringe Genauigkeit
PID-Regler: sehr schneller, sehr gute Genauigkeit (sehr empfindlich)
a) Mit dem Zählerausdruck (1+sT) des PI-Reglers wird die größte Zeitkonstante der Regelstrecke
kompensiert
b) Der I-Anteil eines Reglers setzt die Regeldifferenz auf Null
c) Der Phasenwinkel φ ist eine Größe für die Dämpfung des geschlossenen Regelkreises
(Einschwingverhalten des Regelkreises). φD ist der Winkel, bei dem die Betragskennlinie des
Frequenzganges des offenen Kreises durch die 0-dB-Linie tritt.
41
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
Beispiele zur Erläuterung der obigen Bemerkungen:
Beispiel 1:
Der Frequenzgang des offenen Regelkreises lautet:
F ( s) k R
1 sTR
1 sTR
1
1
1
sTR 1 sTS sT1
sTR 1 sTS
Mit D
1 kR
: Durchtrittsfrequenz, die sich aus der Zeitkonstante TD des I-Gliedes der
TD T1
Strecke ergibt. Daraus folgt k R
1
T
s 1
kR
T1
.
TD
Faustformel: TR 10TS (durch Messung lässt sich sehr gut bestätigen). Damit ergibt sich die
Übertragungsfunktion des offenen Regelkreises zu
F ( s)
1 s10TS
1
s10TS 1 sTS
1 s10TS
1
1
1
T
s10TS 1 sTS 1
s
s 1
TD
kR
Beispiel: TS 0,8 , TD 1,2
a) Bestimmung des Frequenzganges
>> td
td =
1.2000
>> ts
ts =
0.8000
42
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
>> f1
Transfer function:
8s+1
------8s
>> f2
Transfer function:
1
--------0.8 s + 1
>> f3
Transfer function:
0.12
---s
>> f=f1*f2*f3
Transfer function:
0.96 s + 0.12
--------------6.4 s^3 + 8 s^2
>> margin (f)
43
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
Bode Diagram
Gm = -Inf dB (at 0 rad/sec) , Pm = 43.9 deg (at 0.154 rad/sec)
Magnitude (dB)
100
50
0
-50
Phase (deg)
-100
-120
-150
-180
-3
10
-2
10
-1
0
10
10
1
10
2
10
Frequency (rad/sec)
Die Durchtrittsfrequenz die Phasenkennlinie des offenen Kreises verläuft oberhalb von -180°. Und
damit rechnen wir mit dem stabilen Verhalten des geschlossenen Regelkreises. Die folgende
Bestimmung der Sprungantwort des geschlossenen Regelkreises bestätigt das Gesetz von Nyquist.
b) Bestimmung der Sprungantwort
>> m=feedback (f,1)
Transfer function:
0.96 s + 0.12
------------------------------6.4 s^3 + 8 s^2 + 0.96 s + 0.12
>> step (m)
44
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
Step Response
1.4
1.2
Amplitude
1
0.8
0.6
0.4
0.2
0
0
20
40
60
80
100
120
Time (sec)
c) Änderung
des
Verstärkungsfaktor
und
damit
die
Sprungantwort
darstellen
(Der
Verstärkungsfaktor steck in der Beziehung für TD . Es wird angenommen, dass TD =12 ist:
Bode Diagram
Gm = -Inf dB (at 0 rad/sec) , Pm = 16.4 deg (at 3.77 rad/sec)
150
Magnitude (dB)
100
50
0
-50
Phase (deg)
-100
-120
-150
-180
-3
10
-2
10
-1
0
10
10
Frequency (rad/sec)
45
1
10
2
10
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
Step Response
1.8
1.6
1.4
Amplitude
1.2
1
0.8
0.6
0.4
0.2
0
0
1
2
3
4
5
Time (sec)
46
6
7
8
9
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
Weiterer Versuch für TD =0.12
Bode Diagram
Gm = -Inf dB (at 0 rad/sec) , Pm = 43.9 deg (at 0.154 rad/sec)
Magnitude (dB)
100
50
0
-50
Phase (deg)
-100
-120
-150
-180
-3
10
-2
-1
10
0
10
1
10
10
2
10
Frequency (rad/sec)
Step Response
1.4
1.2
Amplitude
1
0.8
0.6
0.4
0.2
0
0
20
40
60
Time (sec)
47
80
100
120
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
Bei allen Versuchen ist festzustellen, dass die Phasenreserve oberhalb der -180°-Linie liegt und somit
alle Versuche weisen ein stabiles Verhalten des geschlossenen Regelkreises auf. Die Phasenreserve
ergibt sich zwischen -180° und der Phase, die sich bei der Durchtrittsfrequenz D
1 kR
TD T1
die Phasenkennlinie schneidet. Möchte man eine gewünschte Phasenreserve festlegen, so verschiebt
man die 0-Kennlinie des Amplitudenganges nach oben/unten und bestimmt die neue
Durchtrittsfrequenz und damit die gewünschte Phasenreserve. Die Erfahrung hat gezeigt, dass eie 60°Phasenreserve gute Resultate liefert.
Nun betrachten wir eine folgende Gesamtübertragungsfunktion eines offenen Regelkreise und wollen
die vorherigen Untersuchungen für einen geschlossenen Regelkreis wiederholend anwenden.
>> f4=tf([0 1],[td 1])
Transfer function:
1
--------120 s + 1
>> f=f1*f2*f3*f4
Transfer function:
8s+1
--------------------------------------92160 s^4 + 116736 s^3 + 1926 s^2 + 8 s
>> margin (f)
48
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
Bode Diagram
Gm = -16.4 dB (at 0.00889 rad/sec) , Pm = -35.8 deg (at 0.0195 rad/sec)
50
Magnitude (dB)
0
-50
-100
-150
-200
-90
Phase (deg)
-135
-180
-225
-270
-3
-2
10
-1
10
0
10
1
10
2
10
10
Frequency (rad/sec)
6
1.5
Step Response
x 10
1
0.5
Amplitude
0
-0.5
-1
-1.5
-2
-2.5
0
500
1000
1500
2000
2500
3000
3500
Time (sec)
Hier handelt es sich um einen instabilen geschlossenen Regelkreis, da der stationäre Zustand nie
erreicht wird, also Sprungantwort ohne Ausgleich. Die Phasenreserve liegt unterhalb der -180°Grenze!
49
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
10. Elektronische Grundschaltungen in der Regelungstechnik (Quelle: Buxbaum&Schierau)
Symbolische Darstellungen mit Frequenzkennlinien
50
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
11. CHR-Verfahren
Die Sprungantwort der meisten in der Regelungstechnik vorkommenden Übertragungsglieder weist
aperiodisches Signal mit Ausgleich auf, wie als Beispiel das untere Bild zeigt.
Sind der Grad n des Verzögerungsverhaltens, die Zeitkonstante T1 und der Verstärkungsfaktor V des
eingesetzten Übertragungsgliedes nicht bekannt, so approximiert man das Übertragungsglied sehr grob
durch die folgende Beziehung:
n
Y (s) V
.
G (s)
U ( s ) 1 sT1
Nach dem Wendetangentenverfahren, wie das untere Bild (Quelle: Ottens) verdeutlich, lassen sich die
unbekannten Größen ermitteln.
~
~
Die Parameter T t und T VZ lassen sich aus einer Konstruktion der Wendetangente am Wendepunkt in
der gemessenen Sprungantwort bestimmen. Der Verstärkungsfaktor ergibt sich durch das Verhältnis
der Amplituden der Eingangs- und Ausgangsgröße im stationären Zustand, also für t→∞. Bildet man
~
das Verhältnis, der aus der Sprungantwort abgelesenen Größen
Tt
~
, so lässt sich nach dem Diagramm
T VZ
die Ordnung n des Übertragungsgliedes ablesen. Aus der nachfolgenden Darstellung bestimmt man für
bekannt gewordenen n, die Zeitkonstante T1 des Übertragungsgliedes (Bild unten).
51
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
Bemerkung:
Bemerkung:
Tg
Tu
Tg
~
Tt
Tu
~
T VZ
~
Tt
~
T VZ
Da der Wendepunkt der Sprungantwort nur qualitativ zu ermitteln ist, weist das Verfahren ungenaue
Ergebnisse auf. Alternativ hierfür ist das Zeitprozentverfahren (CHR-Verfahren) zu bevorzugen.
Dieses Verfahren wurde von Chien-Hrones-Reswick für aperiodische Übetragungssysteme mit
Verzögerung höherer Ordnung und ggf. Totzeitverhalten entwickelt. Damit wird aus der gemessenen
Sprungantwort des Systems die PTn-Übertragungsfunktion berechnet. Die zu berechneten Größen
wären die Ordnung des Systems n, der Verstärkungsfaktor V und die Zeitkonstante T.
F ( s)
Y (s)
V
U ( s ) 1 sT n
.
Durch das Verfahren wird die zeitliche Funktion der gemessenen Sprungantwort analytisch mit der
folgenden Beziehung ermittelt:
n 1 t / T k t / T
y (t ) h(t ) V 1
e .
k 0 k!
Die Testfunktion am Eingang des Systems ist eine Sprungfunktion mit der Amplitude 1. Der
Verstärkungsfaktor lässt sich durch das Verhältnis der Ausgangsgröße zur Eingangsgröße im
stationären Zustand, also für t→∞ berechnet. Für Anwendung des Verfahrens werden die
Zeitprozentkennwerte t m , z.B. für m =10, 30,50, 70 und 90 der Sprungantwort ermittelt (Bild unten):
52
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
Die Zeitpunkte t10 , t 30 , t 50 , t 70 , t 90 sind diejenigen Zeitpunkte, an denen die Sprungantwort
m 10%,30%,50%,70%,90% ihres stationären Endwertes m 100% annimmt. Zu jedem
Amplitudenwert m ist ein Zeitprozentwert t m , die Systemordnung n und die Zeitkonstante T gemäß
folgender Beziehung zugeordnet (Ottens):
k
t
n 1 t m / T T
m% 1
e 100% .
k!
k 0
Zur Bestimmung der Systemordnung wurden die Quotienten der Zeitprozentverhältnisse wie folgt
ermittelt:
n
t10 / t 90
t10 / t 70
t10 / t 50
t10 / t 30
t 30 / t 70
t 30 / t 50
1
2
3
4
5
6
7
8
9
10
0.05
0.14
0.21
0.26
0.30
0.34
0.37
0.40
0.42
0.44
0.09
0.22
0.31
0.37
0.42
0.45
0.48
0.51
0.53
0.55
0.15
0.32
0.41
0.48
0.52
0.56
0.58
0.61
0.63
0.65
0.30
0.48
0.58
0.63
0.67
0.70
0.72
0.74
0.75
0.76
0.30
0.45
0.53
0.58
0.62
0.65
0.67
0.69
0.70
0.71
0.52
0.65
0.72
0.75
0.78
0.80
0.81
0.82
0.83
0.84
Die untere Darstellung wurde durch das Programm EXCEL erstellt und wiedergibt die Tabellengrößen
graphisch.
53
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
Für z.B. n=1, 2, …, 10 lassen sich die Quotienten
tm
berechnen. Chien-Hrones-Reswick haben diese
T
Berechnung tabellarisch (und auch graphisch) wie folgt ermittelt:
n
t10 / T
t 30 / T
t 50 / T
t 70 / T
t 90 / T
1
2
3
4
5
6
7
8
9
10
0.11
0.53
1.10
1.74
2.43
3.15
3.89
4.66
5.43
6.22
0.36
1.10
1.91
2.76
3.63
4.52
5.41
6.31
7.22
8.13
0.69
1.68
2.67
3.67
4.67
5.67
6.67
7.67
8.67
9.67
1.20
2.44
3.62
4.76
5.89
7.01
8.11
9.21
10.3
11.4
2.30
3.89
5.32
6.68
7.99
9.27
10.5
11.8
13.0
14.2
54
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
Zur Bestimmung der Zeitkonstante T berücksichtigt man die Zeile in der obigen Tabelle, wo die
Ordnung des Systems festgelegt wurde. Für irgend eines Verhältnis
tm
der erwähnten Zeile wird die
T
Zeitkonstante T berechnet (siehe Laborunterlagen).
Beispiel
Eine Klimaanlage antwortet auf einer Eingangsgröße von 2 auf 5 mit folgender Temperaturänderung:
Der Verstärkungsfaktor V berechnet sich im stationären Zustand der Sprungantwort nach
V
y () 27 16C
3.66C .
u
52
Nun werden die Ordnung n und die Zeitkonstante T aus der Sprungantwort berechnet. Die
Zeitprozente lassen sich grob wie folgt ablesen:
t10 4s; t 30 6.8s; t 50 9s; t 70 12.8s; t 90 18.9s .
Die Ordnung des Systems kann aus der obigen
Zeitprozentkennwertverhältnisses ermittelt werden:
Tabelle
durch Bildung z.B.
eines
t10
4s
0.211 → n =3.
t 90 18.9s
Die anderen Zeitprozentverhältnisse führen zum gleichen Ergebnis und liefern auch nach der
entsprechenden Tabelle die Systemordnung n =3.
55
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
Mit der Bestimmung dieser Größe liest man für n =3 die zu
tm
gehörenden Werte ab, woraus sich die
T
Zeitkonstante T ermittelt wird:
t10
T
t 30
T
t 50
T
t 70
T
t 90
T
t10
4s
3.63
1.10 1.10
t
6. 8 s
1.91 T 30
3.56
1.91 1.91
t
9s
2.67 T 50
3.37
2.67 2.67
t
12.8s
3.62 T 70
3.53
3.62 3.62
t
18.9 s
5.32 T 90
3.55
5.32 5.32
1.10 T
Durch Bildung der einfachen arithmetischen Mittelwert wird dann die letzte Unbekannte, nämlich die
Zeitkonstante T =3.528 berechnet. Die Übertragungsfunktion des unbekannten Systems lautet dann:
F (s)
Y ( s)
V
3.66C
n
U ( s ) 1 sT
1 s3.5283
.
Die Berechnung der Sprungantwort liefert die folgende mathematische Beziehung (Reihenbildung):
n 1 t / T k t / T
y (t ) h(t ) V 1
e
k 0 k!
1
2
t 0
t
t
t
t
t
3.528 3.528 3.528 3.528 3.528 3.528
3.661
e
e
e
0!
1!
2!
t
t
t
t
t2
3.661 e 3.528
e 3.528
e 3.528
3.528
24.89
t
t
t 2
3.661 e 3.528 1
3.528 24.89
Das folgende Bild mit EXCEL gefertigt wiedergibt die Funktion der Sprungantwort aus der obigen
Funktionsgleichung für h(t ) .
56
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
57
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
12. Korrespondeztabelle, Regelkreisglieder (Quelle: Reuter)
58
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
59
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
60
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
61
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
62
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
63
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
64
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
65
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
66
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
67
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
68
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
13. Analyse von geschlossenen Regelkreisen
Stabilitätsuntersuchung
Für den Begriff Stabilität gilt die allgemeine Aussage: Ein lineares Übertragungssystem heißt
stabil, wenn seine Sprungantwort für t → ∞ einem endlichen Wert zustrebt. Anderenfalls heißt
es instabil.
Weitere Kriterien:
Fall 1.
„Die charakteristische Gleichung eines geschlossenen Systems folgt durch Nullsetzen des Nenners.
Maßgebend für die Stabilität eines Systems ist, dass alle Nullstellen von 1 F0 ( s) , d.h. die
Polstellen des Systems, in der linken Halbebene liegen.“
69
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
Die Führungsübertragungsfunktion des geschlossenen Regelkreises lautet:
FW ( s)
FR ( s) FS ( s)
X ( s)
W ( s) 1 FR ( s) FS ( s)
chaktaristische
Gleichung
Fall 2:
Nyquist-Kriterium: „Ist der offene Regelkreis stabil, so ist der geschlossene Regelkreis genau dann
stabil, wenn die Ortskurve des offenen Kreises den Punkt -1 (der reellen Achse) weder umkreist noch
durchdringt.“
Beispiel a)
F0 ( s )
4.2 s 1.3
4s 1
Die charakteristische Gleichung des geschlossenen Regelkreises lautet:
4.2s 1.3 8.2s 0.3
0
4s 1
4s 1
8.2s 0.3 0
1 F0 ( s) 1
s 0.0365
Die Nullstelle befindet sich demnach in der positiven Halbebene und demnach ist das System
instabil.Betrachtet man das Kriterium nach Nyquist und berücksichtigt man die Ortskurve des offenen
Regelkreises
MATLAB-Befehl: nyquist(F0),
Nyquist Diagram
1.5
1
Imaginary Axis
0.5
0
-0.5
-1
-1.5
-1.5
-1
-0.5
0
0.5
Real Axis
70
1
1.5
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
so erkennt man, das die Ortskurve des offenen Regelkreises den Punkt -1 auf der negativen reellen
Achse umkreist. Nach den Kriterien von Nyquist ist auch das System instabil. Auch die Sprungantwort
des geschlossenen Regelkreises
FW ( s )
FR ( s ) FS ( s )
X ( s)
W ( s ) 1 FR ( s ) FS ( s )
4.2s 1.3
F ( s ) FS ( s )
1 FR ( s ) FS ( s )
1
1
4.2 s 1.3
4s 1
X (s) W ( s) R
4.2s 1.3 s 4 s 1 4.2s 1.3
1 FR ( s ) FS ( s ) s 1 FR ( s ) FS ( s ) s
1
4s 1
1 4.2 s 1.3
s 8.2 s 0.3
MATLAB-Befehl:
step(feedback(F0,1))
7
1
Step Response
x 10
0
Amplitude
-1
-2
-3
-4
-5
-6
0
50
100
150
200
250
300
350
400
450
Time (sec)
Die Instabilität des geschlossenen Regelkreises ist aus der Sprungantwortkennlinie ohne Ausgleich zu
erkennen.
71
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
Beispiel b)
F0 ( s )
4.2 s 1.3
4s 1
Die charakteristische Gleichung des geschlossenen Regelkreises lautet:
4.2s 1.3 8.2s 2.3
0
4s 1
4s 1
8.2s 2.3 0
1 F0 ( s) 1
s 0.28
Die Nullstelle befindet sich demnach in der negativen Halbebene und demnach ist das System stabil.
Betrachtet man das Kriterium nach Nyquist und berücksichtigt man die Ortskurve des offenen
Regelkreises MATLAB-Befehl: nyquist(F0),
Nyquist Diagram
0.2
0.15
0.1
Imaginary Axis
0.05
0
-0.05
-0.1
-0.15
-0.2
-1
-0.5
0
0.5
1
1.5
Real Axis
so erkennt man, das die Ortskurve des offenen Regelkreises den Punkt -1 auf der negativen reellen
Achse nicht umkreist und auch nicht durchdringt. Nach den Kriterien von Nyquist ist auch das System
stabil. Auch die Sprungantwort des geschlossenen Regelkreises
72
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
FW ( s )
FR ( s ) FS ( s )
X ( s)
W ( s) 1 FR ( s) FS ( s )
F ( s ) FS ( s)
1 FR ( s ) FS ( s )
1
X (s) W (s) R
1 FR ( s ) FS ( s ) s 1 FR ( s ) FS ( s ) s
4.2s 1.3
1
4.2s 1.3
4s 1
4.2s 1.3 s 4s 1 4.2s 1.3
1
4s 1
1 4.2s 1.3
s 8.2s 2.3
MATLAB-Befehl:
step(feedback(F0,1))
Step Response
0.58
0.57
Amplitude
0.56
0.55
0.54
0.53
0.52
0.51
0
5
10
15
20
25
Time (sec)
Die Stabilität des geschlossenen Regelkreises ist aus der Sprungantwortkennlinie mit Ausgleich zu
erkennen.
Fall 3:
Nyquist Kriterium:
Ist die Ortskurve weit genug vom kritischen Punkt -1 entfernt, so verläuft der Einschwingvorgang des
geschlossenen Regelkreises hinreichend gedämpft. Nach Nyquist ist die Phasenreserve R ein
geeignetes Maß für den Abstand der Ortskurve vom Punkt -1. R ist auch ein geeignetes Maß für die
Dämpfung des Einschwingvorgangs. Eine kleine Phasenreserve
73
R bedeutet ein starkes
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
Überschwingen und lange Überschwingdauer. Bei Erhöhung der Phasenreserve R wird der
Einschwingvorgang gedämpft, Überschwingweite und Einschwingdauer nehmen ab.
Beispiel:
Gegeben sei die Übertragungsfunktion des offenen Regelkreises
F0 ( s)
V
. Dabei ist V der Verstärkungsfaktor des Systems und wäre variabel.
s(1 s)(1 0.2s)
Durch Änderung des Verstärkungsfaktors V wird die Stelle der Durchtrittsfrequenz D verändert
und als Folge dafür auch die Größe der Phasenreserve R , wie das Beispiel zeigt.
Step Response
2
1.8
1.6
1.4
Amplitude
1.2
1
0.8
0.6
0.4
0.2
0
0
5
10
15
20
25
Time (sec)
74
30
35
40
45
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
Bode Diagram
Gm = -0.291 dB (at 2.24 rad/sec) , Pm = -0.722 deg (at 2.27 rad/sec)
Magnitude (dB)
50
0
-50
-100
Phase (deg)
-150
0
-90
-180
-270
-2
10
-1
0
10
10
1
10
2
10
Frequency (rad/sec)
Der Verstärkungsfaktor wurde weiter vergrößert. Dadurch ist die Phasenreserve R nicht nur kleiner
geworden sondern auch ihre Polarität verändert.
Bode Diagram
Gm = -10.7 dB (at 2.24 rad/sec) , Pm = -24 deg (at 3.92 rad/sec)
Magnitude (dB)
50
0
-50
Phase (deg)
-100
0
-90
-180
-270
-2
10
-1
10
0
10
Frequency (rad/sec)
75
1
10
2
10
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
Die Erfahrung aus der Praxis erfordert eine mindestens Phasenreserve von R 60 . Unterhalb dieser
Größe führt die Stabilität des geschlossenen Regelkreises in die kritische Lage.
76
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
ANLAGEN
A1:
Anwendungsbeispiele mit MATLAB:
MATLAB-Befehle:
F=tf([1 4],[1 5 10 4 10 1])
Transfer function:
s+4
--------------------------------------s^5 + 5 s^4 + 10 s^3 + 4 s^2 + 10 s + 1
Pole=pole(F)
Pole =
-2.5592 + 1.7529i
-2.5592 - 1.7529i
0.1109 + 0.9973i
0.1109 - 0.9973i
-0.1032
Nulstellen=tzero(F)
Nulstellen =
-4
Pole=roots([1 5 10 4 10 1])
Pole =
-2.5592 + 1.7529i
-2.5592 - 1.7529i
0.1109 + 0.9973i
0.1109 - 0.9973i
-0.1032
77
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
G=zpk(F)
Zero/pole/gain:
(s+4)
----------------------------------------------------------(s+0.1032) (s^2 - 0.2217s + 1.007) (s^2 + 5.118s + 9.623)
nyquist(F)
grid
Nyquist Diagram
2.5
0 dB
-2 dB
2
Imaginary Axis
1.5 2 dB
1 4 dB
6 dB
0.5 10 dB
20 dB
0
-4 dB
-6 dB
-10 dB
-20 dB
-0.5
-1
-1.5
-2
-2.5
-1
-0.5
0
0.5
1
1.5
Real Axis
78
2
2.5
3
3.5
4
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
bode(F)
grid
Bode Diagram
Magnitude (dB)
50
0
-50
-100
-150
-270
Phase (deg)
-315
-360
-405
-450
-4
10
-3
10
-2
-1
10
10
Frequency (Hz)
79
0
10
1
10
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
margin(F)
grid
Bode Diagram
Gm = Inf , Pm = -147 deg (at 0.179 Hz)
Magnitude (dB)
50
0
-50
-100
-150
-270
Phase (deg)
-315
-360
-405
-450
-4
10
-3
10
-2
-1
10
10
Frequency (Hz)
80
0
10
1
10
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
feedback(F, 1)
Transfer function:
s+4
--------------------------------------s^5 + 5 s^4 + 10 s^3 + 4 s^2 + 11 s + 5
step(feedback(F, 1))
grid
Step Response
2.5
2
1.5
Amplitude
1
0.5
0
-0.5
-1
-1.5
0
1
2
3
4
5
Time (sec)
81
6
7
8
9
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
A2:
Das stationäre Verhalten des Regelungskreises
(Quelle: Manfred Berger, Grundkurs der Regelungstechnik)
Allgemeines
Aufgabe der Regelungstechnik:
Die Regelgröße x(t) trotz auftretender Störgrößen zn (t) möglichst genau der
Führungsgröße w(t) anzupassen,
Die bleibende Regelabweichung in stationären Endzustand verschwinden zu lassen.
FR(s) ist die Übertragungsfunktion des Reglers
FS(s) ist die Übertragungsfunktion der Regelstrecke
Mathematische Behandlung:
Xd(s): Regelabweichung
Xd (s) W(s) X(s)
Die Regelabweichung Xd(s) ist gleichzeitig die Eingangsgröße des Reglers.
Die Ausgangsgröße des Reglers ist dann
W(s) X(s) FR (s) .
Die Eingangsgröße der Regelstrecke ist die Summe von Ausgangsgröße des Reglers
plus Störgröße
W(s) X(s) FR (s) Z(s)
Die Ausgangsgröße der Regelstrecke ist dann
W(s) X(s)F (s) Z(s)F (s)
R
S
82
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
Dieses Potential ist identisch mit dem Potential X(s) und kann gleichgesetzt werden
W(s) X(s)F (s) Z(s)F (s) X(s) .
R
S
Fasst man die Terme zusammen, so gilt:
W(s) X(s)F (s) Z(s) F (s) X(s)
R
S
W(s)FR (s) X(s)FR (s) Z(s) Fs (s) X(s)
W(s)FR (s)FS (s) X(s)FR (s)FS (s) Z(s)FS (s) X(s)
W(s)FR (s)FS (s) Z(s)FS (s) X(s) 1 FR (s)FS (s)
W(s)
FR (s)FS (s)
FS (s)
Z(s)
X(s )
1 FR (s)FS (s)
1 FR (s)FS (s)
Die Führungsübertragungsfunktion ist dann
F (s)FS (s)
X(s)
R
W(s) Z(s)0 1 FR (s)FS (s)
Die Störübertragungsfunktion lautet
FS (s)
X(s)
Z(s) W(s)0 1 FR (s)FS (s)
Bestimmung der Regelabweichung:
(Die Störgröße wird vernachlässigt)
Xd (s) W(s) X(s)
Das gleiche Potential erhält man, wenn man im geschlossenen Regelkreis die
Regelabweichung in Abhängigkeit der Regelgröße bestimmt zu
Xd (s)
1
X(s)
FR (s)FS (s)
X(s) Xd (s)FR (s)FS (s)
Setzt man die Größe X(s) in die obige Gleichung ein, folgt daraus die
Regelabweichung:
83
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
Xd (s) W(s) Xd (s)FR (s)FS (s)
Xd (s) 1 FR (s)FS (s) W(s)
Xd (s)
W(s)
1 FR (s)FS (s)
Die bleibende Regelabweichung im Zeitbereich e() ergibt sich für t auf
Grund des Endwertsatzes zu:
xd () lim x d (t) lim Xd (s)s
t
s0
s
W(s) .
1 FR (s)FS (s)
Beispiel:
Man bestimme die bleibende Regelabweichung
e()
für den angegebenen
Regelungskreis mit KR=100.
Das System wird mit einer Sprungfunktion w(t) 5 1(t) beaufschlagt und ist für alle
Verstärkungsfaktoren des Reglers KR>0 stabil.
Die Reglerübertragungsfunktion: FR (s) K R .
Die Streckenübertragungsfunktion ergibt sich aus der Kreisstruktur der beiden Blöcke.
Bezeichnet man den Reglerausgang mit y, dann ergibt sich für die Produktbildung
folgende Beziehung:
84
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
1
1
X(s)
Xd (s)K R X(s)
2
s 2 s 10s 24
1
1
1
Xd (s)K R s2 10s 24 X(s) s 2 s2 10s 24 X(s)
1
1
1
Xd (s)K R 2
X(s) 1
2
s 10s 24
s 2 s 10s 24
X(s)
FR (s)Fs (s)
Xd (s)
1
s 10s 24
1
1
1
2
s 2 s 10s 24
1
KR 2
s 10s 24
1 (s 2)(s2 10s 24)
(s 2)(s2 10s 24)
KR
2
1
(s 2)(s2 10s 24)
s2 10s 24 1 (s 2)(s2 10s 24)
K R (s 2)
K R (s 2)
3
2
1 (s 2)(s 10s 24) s 12s2 44s 49
KR
Die bleibende Regelabweichung im Zeitbereich e() ergibt sich für t auf
Grund des Endwertsatzes zu:
x d ( ) lim x d (t) lim Xd (s)s lim
t
s 0
s 0
s
W(s)
1 FR (s)FS (s)
s
1
5
K R (s 2)
s
1 3
2
s 12s 44s 49
1
x d ( ) lim
5
s 0
K R (s 2)
1 3
s 12s2 44s 49
1
x d ( ) lim
5
s 0
KR 2
1
49
5
x d ()
0.98 0
100 2
1
49
x d ( ) lim
s 0
85
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
Mit der Übertragungsfunktion wird die Sprungantwort berechnet und dargestellt.
F (s)FS (s)
X(s)
F(s)
R
W(s) 1 FR (s)FS (s)
K R (s 2)
s 12s2 44s 49
K R (s 2)
1 3
s 12s2 44s 49
3
K R (s 2)
100(s 2) s3 12s2 44s 49
100(s 2)
F(s) 3
s 12s2 144s 249
F(s)
Sprungantwort:
F=tf([100 200],[1 12 144 249])
Transfer function:
100 s + 200
-------------------------s^3 + 12 s^2 + 144 s + 249
step(F)
grid
86
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
Step Response
1
0.9
0.8
0.7
Amplitude
0.6
0.5
0.4
0.3
0.2
0.1
0
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
Time (sec)
Bode-Diagramm
Bode Diagram
20
Magnitude (dB)
0
-20
-40
-60
-80
0
Phase (deg)
-45
-90
-135
-180
-1
10
0
1
10
10
Frequency (Hz)
87
2
10
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
margin(F)
Bode Diagram
Gm = Inf dB (at Inf Hz) , Pm = 113 deg (at 1.47 Hz)
20
Magnitude (dB)
0
-20
-40
-60
-80
0
Phase (deg)
-45
-90
-135
-180
-1
0
10
1
10
2
10
10
Frequency (Hz)
nyquist(F)
Nyquist Diagram
1
0.8
4 dB
2 dB
0 dB
-2 dB
-4 dB
-6 dB
0.6 6 dB
Imaginary Axis
0.4 10 dB
0.2
-10 dB
20 dB
-20 dB
0
-0.2
-0.4
-0.6
-0.8
-1
-1
-0.8
-0.6
-0.4
-0.2
0
Real Axis
88
0.2
0.4
0.6
0.8
1
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
Die nächsten Abbildungen zeigen das Eingangssignal w(t) 5 1(t) den Graph x(t),
dessen Endwert mit dem ermittelten Wert übereinstimmt.
100(s 2)
5
s 12s2 144s 249
500s 1000
F(s) 3
s 12s2 144s 249
3
Step Response
5
4.5
4
3.5
3
Amplitude
F(s)
2.5
2
1.5
1
0.5
0
0
0.2
0.4
0.6
Time (sec)
89
0.8
1
1.2
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
Step Response
5
4.5
4
3.5
Amplitude
3
2.5
2
1.5
1
0.5
0
0
0.2
0.4
0.6
Time (sec)
A3:
Phasenrand, Amplitudenrand
90
0.8
1
1.2
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
A4:
Wendetangente
Tu-Tg
A5:
Vergleich Reglertypen
91
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
A6:
Entwurf im Bode-Diagramm
f1=tf([0 1],[1 0])
Transfer function:
1
s
f2=tf([0 1],[1 4])
Transfer function:
1
----s+4
f3=tf([0 1],[1 6])
Transfer function:
1
----s+6
F=f1*f2*f3
Transfer function:
1
------------------s^3 + 10 s^2 + 24 s
bode(F)
hold on
margin(F)
92
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
D : Durchtrittsfrequenz
: Die Frequenz bei der Phase 180
A R : Amplitudenreserve
R : Phasenreserve
93
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
Beispiel:
(Quelle: Manfred Berger, Grundkurs der Regelungstechnik)
Bemerkungen:
An
den
Amplituden- und Phasengang des aufgetrennten
F0 ( j) FR ( j) FS ( j) werden folgende Forderungen gestellt:
Regelkreises
REGLER STRECKE
o Im unteren Frequenzbereich D soll der Betrag 20log F0 (j) , d.h. der
Verstärkungsfaktor K möglichst groß sein, damit die bleibende
Regelabweichung klein wird und die Regelung effizient ist.
o Im mittleren Frequenzbereich darf der Amplitudengang den Wert von -20dB
pro Dekade in der Nähe der Durchtrittsfrequenz D bei phasenminimalen
Systemen nicht wesentlich überschreiten, da sonst die Phasenreserve R zu
klein wird. Hierdurch werden eine ausreichende Stabilitätsreserve, gutes
Führungsverhalten
und
geringe
Empfindlichkeit
gegenüber
Parametervariationen des Regelungssystems erzielt. Je größer D ist, desto
schneller ist die Systemantwort und desto größer ist auch die Bandbreite b .
o Im Oberen Frequenzbereich D sorgt ein rascher Abfall des
Amplitudenganges für geringen Störgrößeneinfluß bzw. Unterdrückung
unerwünschter höherfrequenter Signale, z.B. Sensorrauschen.
94
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
o Mit den folgenden Erfahrungswerten für die Amplitudenreserve A R und die
Phasenreserve R des aufgetrennten Regelungskreises erhält man ein
befriedigendes dynamisches Führungs- und Störverhalten des geschlossenen
12 A R 20dB; 40 R 60
Regelungskreises:
Führungsverhalten:
Störverhalten: 3.5 AR 9.5dB; 20 R 50
o Die Phasenreserve R sollte nicht unter 40° absinken.
o Ist ein aperiodischer Verlauf der Regelgröße erwünscht, wählt man die
Phasenreserve größer als 70°.
o Beim Auslegen eines Regelungskreises wird man Kompromisse eingehen
müssen.
o Die gewählten Einstellwerte des Reglers erfüllen in den meisten Fällen nicht
gleichzeitig die geforderten Werte für gutes Führungs- und Störverhalten. Die
Ergebnisse sind wie beim Entwurf nach dem Wurzelortskurven-Verfahren
entsprechend zu verifizieren und nachzubessern (Faustformel: Siehe Manfred
Berger, Seite 272).
o Beispiel: Reglerentwurf im Bode-Diagramm, Berger, Seite 273,
Verstärkungsfaktor-Kompensation (P-Regler):
Transfer function:
1
------------------s^3 + 10 s^2 + 24 s
bode(F, {0.1, 10})
hold on
margin(F)
95
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
Beträgt die gewünschte Phasenreserve R 60 , dann konstruiert man eine Gerade
mit dem Abstand von 60° von der 180°-Phasenlinie aus und vestimmt man den
Schnittpunkt mit der Phasenkennlinie.
Dieser Schnittpunkt legt die Durchtrittsfrequenz bei dem Amplitudengang fest.
Dadurch ist die 0dB-Linie des Amplitudenganges nach unten verschoben. Die
Amplitudenreserve A R ist dann dadurch bei festzulegen.
96
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
D
Neue 0dB-Linie
AR
R 60
Wünscht man sich nach dieser erfolgten Änderung einen Verstärkungsfaktor (aus der
neuen Darstellung nach der Faustformel von Berger abgeleitet!) von K=37 und
betrachtet man dann die Sprungantwort des geschlossenen Regelkreises, so folgt:
97
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
Statischer Zustand ab ca. 3s !
98
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
Ist K=1, also ohne vorherige Korrektur, dann sähe die Sprungantwort wie folgt aus (Kein
Überschwingverhalten aber die Führungsgröße wird erst nach 150s erreicht):
Zusammenfassung:
Die Durchtrittsfrequenz D ist dijenige Frequenz, bei der der Amplitudengang A()
des aufgetrennten Regelkreises F0 (j) die 0-dB-Linie schneidet.
Analog wird die Durchtrittsfrequenz krit als diejenige Frequenz definiert, bei der
der Phasengang () die -180°-Linie schneidet.
Die Amplitudenreserve A R und die Phasenreserve R des aufgetrennten Regelkreises
geben an, wie weit der Betrag der Amplitude in dB bzw. der Phase in Grad erhöht
werden darf, bevor Instabilität auftritt.
99
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
Die Amplitudenreserve A R und die Phasenreserve R können aus dem BodeDiagramm des aufgetrennten Regelkreises abgelesen werden.
Die Amplitudenreserve A R
AR
1
F0 (j )
gibt an, um welchen Faktor die Verstärkung K Kkrit der Übertragungsfunktion F0 (j)
bis zum Erreichen der Stabilitätsgrenze erhöht werden darf. Durch die obige
Beziehung erhält man für die Amplitudenreserve in dB
AR
dB
20log(1 20log( F0 ( j ) )
und damit die kritische Verstärkung
Kkrit 10
AR
20
mit der die Übertragungsfunktion F0 (j) multipliziert werden muß, damit der
geschlossene Regelungskreis grenzstabiles Übertragungsverhalten hat.
Der Kreis schwingt dann mit der Frequenz krit .
Die Phasenreserve
R (D ) 180
wird mit der Amplitudendurchtrittsfrequenz D bestimmt und für die stabile
Regelungskreise größer Null.
100
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
Eine wichtige Kenngröße für das dynamische Verhalten des Regelungssystems
ist die Bandbreite b des aufgetrennten Regelungskreises, die beim -3 dB
Abfall ermittelt wird.
Durch das Verschieben der 0 dB-Linie nach unten (Vergrößerung des
Verstärkungsfaktors) wird die Bandbreite b des Regelungssystems erhöht.
Eine hohe Bandbreite b bewirkt eine schnelle Reaktion des Systems auf
Führungsgrößenänderungen.
Nachteilig wirkt sich dann die Verstärkung höherfrequenter Störanteile, z.B.
Systemrauschen aus.
Zur näherungsweisen Berechnung können die folgenden Faustformeln für die
Phasenreserve
R 100 bzw.
R
; 0 0.7
100
und die Bandbreite
101
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
b D für R 90; b 2D für R 45
verwendet werden.
A7:
Stabilitätsbetrachtung
Stabilitätsuntersuchung im Bode-Diagramm: „Die Übertragungsfunktion
F0 (j) des aufgetrennten Kreises habe nur Pole mit negativem Realteil und
höchstens zwei Pole bei s=0.
Weiterhin darf in der Übertragungsfunktion ein Totzeitanteil auftreten.
Mit der obigen Vereinbarung ist die Übertragungsfunktion F0 (j) des
aufgetrennten Regelkreises stabil und hat höchstens integrierendes oder
doppelintegrierendes Verhalten sowie ein Totzeitglied.
F0 (s)
KI
Y(s)
U(s)
si
(s z1 )(s z 2 )...(s zm ) sTt
e
(s p1 )(s p2 )...(s pn ) Totzeitglied
Integrator
m n; i 0,1,2
BIBO-Stabilität liegt also vor, wenn die folgende Bedingung erfüllt ist:
AR 0; R 0; D .
Ist
die
Amplitudenreserve
und
die
Phasenreserve
gleich
Null
AR 0; R 0; D ist das System grenzstabil, anderenfalls instabil
AR 0; R 0; D .
102
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
Beispiel:
Regelungskreis mit Einheitsrückführung
Für den nachfolgenden Regelungskreis ist mit der Übertragungsfunktion F0 (s) des
aufgetrennten Kreises das Bode-Diagramm dargestellt.
Der geschlossene Regelungskreis soll eine relative Dämpfung von 0.6 haben.
Man gebe die Phasenreserve und den Verstärkungsfaktor K des Systems an.
Für die geforderte Dämpfung erhält man eine Phasenreserve von R 100 0.6 60 .
Der geschlossene Regelungskreis erfüllt die Bedingung, wenn die 0-dB-Linie um 20
dB nach unten verschoben wird.
103
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
Der Verstärkungsfaktor des Reglers lautet dann
20 log10 K 20dB
log10 K 1dB
K 101 10
Beispiel:
Man zeichne für die angegebene Übertragungsfunktion
F0
10
s(s 13s2 46s 48)
3
eines aufgetrennten Regelungskreises – I-Regler mit PT3-Strecke – das Bode-Diagramm und
gebe die Amplituden- und die Phasenreserve des Systems an.
1. Wie groß ist der kritische Verstärkungsfaktor Kkrit bzw. der Stabilitätsbereich des
geschlossenen Regelkreises?
2. Mit welcher Frequenz krit schwingt das System beim Erreichen der Stabilitätsgrenze?
3. Man bestimme die Bandbreite b des aufgetrennten Regelungskreises.
4. Bei welcher Frequenz hat sich die Größe der Amplitude A2 des Ausgangssignals
des geschlossenen Kreises auf 1/10 der Größe der Amplitude A1 des Eingangssignals
verringert?
104
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
zu 1.
A R 24 dB
20 log10 K 24
log10 K
24
20
24
K 10 20
K 15.66
R 78.5
zu 2.
D 0.2
krit 2
A R 0 und R 0 System ist stabil
Stabilitätsbereich: 0<K<15.66
zu 3.
Bandbreite des aufgetrennten Systems:
b D 0.2
105
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
MATLAB-Befehle (K=10):
F1=tf([10],[1 13 46 48])
Transfer function:
10
-----------------------s^3 + 13 s^2 + 46 s + 48
F2=tf([1],[1 0])
Transfer function:
1
s
F=F1*F2
Transfer function:
10
---------------------------s^4 + 13 s^3 + 46 s^2 + 48 s
margin(F)
106
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
Bode Diagram
Gm = 23.9 dB (at 0.306 Hz) , Pm = 78.7 deg (at 0.0329 Hz)
50
Magnitude (dB)
0
-50
-100
-150
Phase (deg)
-200
-90
-180
-270
-360
-2
10
-1
10
0
10
1
10
2
10
Frequency (Hz)
K=15.66
Bode Diagram
Gm = 20 dB (at 0.306 Hz) , Pm = 72.5 deg (at 0.0509 Hz)
50
Magnitude (dB)
0
-50
-100
-150
Phase (deg)
-200
-90
-180
-270
-360
-2
10
-1
10
0
10
Frequency (Hz)
107
1
10
2
10
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
K=20
Bode Diagram
Gm = 17.9 dB (at 0.306 Hz) , Pm = 68 deg (at 0.0643 Hz)
50
Magnitude (dB)
0
-50
-100
-150
Phase (deg)
-200
-90
-180
-270
-360
-2
-1
10
10
0
10
1
10
2
10
Frequency (Hz)
zu 4.
Im Eingeschwungenen Zustand lautet der Amplitudengang
A() F(j)
A 2 Amplitude der Ausgangsschwingung
0.1
A1 Amplitude der Eingangsschwingung
und damit
A dB 20log(0.1) 20 dB A() 20 dB 1.5 rads-1
Die Frequenz erhält man aus dem Bode-Diagramm des aufgetrennten R
Regelungskreises.
108
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
A8:
Frequenzgang-Verfahren
Betrachtet wird das Übertragungsverhalten eines linearen, zeitinvarianten Systems mit einem
sinusförmigen Eingangssignal (Testsignal) x e (t) (d.h. einer harmonischen Schwingung), mit
der Amplitude A 1 und der Frequenz .
xa (t) A2 sin(t )
xe (t) A1 sin(t)
f(t)
Als Systemantwort erhält man im stationären (eingeschwungenen) Zustand wieder ein
sinusförmiges Ausgangssignal xa (t) mit der Amplitude A 2 und einer Phasenverschiebung .
109
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
In komplexer Schreibweise lauten die Sinussignale
x e (t) A1 e jt
xa (t) A 2 e j( t )
Setzt man deren zeitlichen Ableitungen in die allg. lineare Differenzialgleichung
(n)
(m)
an x a (t) ... a1 xa (t) a0 x a (t) b0 x e (t) b1 x e (t) ... bm x e (t)
ein, so erhält man den Frequenzgang des linearen Übertragungsgliedes als Funktion der
Kreisfrequenz in rads-1.
F( j)
( j)m bm ... ( j)2 b 2 ( j)b1 b0
A 2 j ( )
e
A( )e j( )
, mn.
A1
( j)n an ... ( j)2 a 2 ( j)a1 a0
Der Betrag des Frequenzganges ist im eingeschwungenen Zustand der Amplitudengang
A() F(j)
A 2 Amplitude der Ausgangsschwingung
,
A1 Amplitude der Eingangsschwingung
und das Argument arg(G( j)) der Phasengang
Im F( j)
() arg(F( j)) arctan
Re F( j))
der die Phasenverschiebung des Ausgangssignals gegenüber dem Eingangssignal des Systems
angibt.
Der Frequenzgang F(j) hat für j s (Formaler Übergang: j s
d
) dieselbe Form
dt
wie die Übertragungsfunktion F(s) .
Folglich geht man beim Berechnen des Frequenzganges von der Übertragungsfunktion F(s)
aus, indem man s j setzt.
Die Analyse und Synthese eines Regelungssystems erfolgt im Frequenzbereich mit
der Ortskurve
und dem Bode-Diagramm.
Beide Verfahren gehen von der
Übertragungsfunktion
Regelungskreises aus.
110
F0 (s)
des
aufgetrennten
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
Aufgetrennter Regelungskreis
Ortskurve des Frequenzganges
Allgemein ist der Frequenzgang des aufgetrennten Regelungskreises
F0 ( j)
( j)m bm ... ( j)2 b2 ( j)b1 b0
, m n.
( j)n an ... ( j)2 a2 ( j)a1 a0
Die komplexe Funktion F0 (j) kann in algebraischer oder in exponentieller Form
F0 (j) Re{F0 (j)} Im{F0 (j)} A( )e j( )
angegeben werden.
Der Frequenzgang F0 (j) wird durch seinen Amplitudengang
A( ) F0 ( j) Re F0 ( j) Im F0 ( j)
2
2
und Phasengang
Im F0 ( j)
() arg F0 ( j) arctan
Re F ( j)
0
berechnet und in einem Zeigerdiagramm, der sog. Ortskurve, dargestellt, indem man die
Frequenz von 0 bis variiert.
Die für jeden -Wert ermittelten Schnittpunkte des Real- und Imaginärteils der komplexen
Funktion F0 (j) (sie stellen Zeigerdiagramme dar) werden miteinander verbunden.
Der daraus resultierende Verlauf wird als Ortskurve bezeichnet.
111
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
II
I
0
()
A()
III
IV
Ortskurve
Aus der Ortskurve lassen sich für den Kurvenparameter die Phasenverschiebung () und
das Amplitudenverhältnis A() von Eingangs- und Ausgangssignal im stationären Zustand
entnehmen.
Das obige Bild zeigt die Ortskurve eines PT2-Systems, die durch den vierten und dritten
Quadranten verläuft.
Eine besondere Bedeutung haben diejenigen Punkte der Ortskurve, bei denen der
Amplitudengang einen Maximalwert erreicht.
Einen solchen Punkt nennt man eine Resonanzstelle MR und die dazugehörige Frequenz die
Resonanzfrequenz R .
112
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
A9:
Laplace-Transformation
Die Laplace-Transformation ist eine Integraltransformation. Mittels des Laplace-Integrals
t
F (s)
f (t ) e st dt
t 0
wird einer Zeitfunktion f (t ) eine korrespondierende Funktion F ( s ) im Laplace-Bereich
zugeordnet. s wird als Laplace-Variable bezeichnet. Die symbolische Zuordnung wird durch
die Beziehung
F (s) L f (t )
dargestellt.
113
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
Beispiel:
Die Laplace-Transformation einer Sinus-Funktion mit den Angaben
o für t 0
f (t )
sin(t ) für t 0
ergibt sich zu:
L sin t
t
sin t e
t 0
st
dt
dv
u
Es gilt: u dv u v v du
1
u sin t ; du cos t ; dv e st ; v e st
s
t
t
1
1
L sin t e st sin t e st cos t dt
s
s
t 0
t 0
0
t
1
L sin t e st cos t dt
s t 0
t
e jt e jt
1
e st
s t 0
2
dt
cos t
nachEuler
1 st jt
e e dt e st e jt
2s 0
0
t
1
1
1
s j t
s j t
e
e
2 s s j
s j
t 0
1 1
1
2 s s j s j
s 2
2
114
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
A10:
Passiver Zweipol
Beispiel
1
R2
jC1
1
R2
R2
ua ( j)
R2
R2
jC1
1 jC1R2
F( j)
1
R2
ue ( j)
R2 R11 jC1R2 R2 R1 jC1R1R2
R2
R1
jC1
1 jC1R2
R1
1
R2
jC1
R2
1
R1 R2 1 jC R1R2
1
R1 R2
R1R2
RR
1 jC1 1 2
R2
1
R2
R1 R2
R1 R2
2
R1R2
R1 R2 1 jC R1R2
R
R
1
2
R1R2
1 jC1
1
1 C1
R1 R2
R1 R2
R1 R2
R1R2
C1
R2
1
R1 R2
j
2
2
R1 R2
RR
1 C R1R2
1 C1 1 2
1R R
R
1
2
1 R2
ReF( j)
ImF( j)
1 jC1
115
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
Amplitudengang
Betrag von F( j) :
F( j)
R2
R1 R 2
R2
R1 R 2
R2
R1 R 2
F( j) dB
1
R 1R 2
1 C1
R
1 R2
2
R 1R 2
C 1
R1 R 2
2
R 1R 2
1 C1
R
1 R2
R 1R 2
1 C1
2
R
1 R2
R 1R 2
1 C1
R1 R 2
1
1
R 1R 2
1 C1
R1 R 2
2
2
2
2
R2
R 1R 2
20 log
20 log 1 C1
R1 R 2
R1 R 2
2
20 log0.5 20 log 1
2
mit C1
R 1R 2
1
C1R 10ms und g 200 s 1
R1 R 2
Phasengang
R1R 2
ImF( j)
arctan C1
arctan
R1 R 2
ReF( j)
F( j) dB
0
20 log0.5 6dB
1
2
20 log0.5 20 log 1 1 -9dB
ab
1
,
Abfall mit -
arctan
arctan0 0
arctan1 45
arctan 90
20dB/Dekade
116
ReF( j)
ImF( j)
R2
R1 R 2
0
R2
1
R1 R 2 2
0
R2
1
R1 R 2 2
0
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
Simulation mit MATLAB/SIMULINK
syms staw
syms s positive
y=tf([0.5],[0.005 1])
Setzt man die vorgegebenen Werte für C und R ein, so lautet die Übertragungsfunktion:
Transfer function:
0.5
----------0.005 s + 1
margin(y)
grid
Frequenzgang
Bode Diagram
Gm = Inf , Pm = Inf
0
Magnitude (dB)
-10
-20
-30
-40
Phase (deg)
-50
0
Grenzfrequenz (wie oben
rechnerisch
ermittelt)
1
g
200 s 1
-45
-90
1
10
2
3
10
10
Frequency (rad/sec)
117
4
10
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
Ortskurve
Nyquist Diagram
1
4 dB
0.8
2 dB
0 dB
-2 dB
-4 dB
-6 dB
0.6 6 dB
Imaginary Axis
0.4 10 dB
0.2
-10 dB
20 dB
-20 dB
0
-0.2
-0.4
-0.6
-0.8
-1
-1
-0.5
0
0.5
Real Axis
Sprungantwort
Step Response
0.5
0.45
0.4
0.35
Amplitude
0.3
0.25
0.2
0.15
0.1
0.05
0
0
0.005
0.01
0.015
Time (sec)
118
0.02
0.025
0.03
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
A11:
PI-Regeleinrichtung
(Proportional-integral Verhalten)
Die Ausgangsgröße y R (t ) einer PI-Regeleinrichtung
ist gleich
(Parallelschaltung) der Ausgangsgrößen einer P- und einer I-Einrichtung.
der
Summe
Der mathematische Zusammenhang zwischen der Ausgangs- und Eingangsgrößen einer PIRegeleinrichtung wird durch folgende Gleichung beschrieben:
y R (t ) K P x d (t ) K I x d (t )dt .
mit:
K I :Übertragungskons tan te oder Verstärkungsfaktor des I-Gliedes
KI
KP
Tn
meistens wird K P 1 gewählt und K I durch Tn ermittelt
bzw:
Tn
Kp
KI
: Zeitkons tan te des I-Gliedes
K P : Übertragungskons tan te oder Verstärkungsfaktor des P-Gliedes
Setzt man anstelle der Übertragungskonstante K I die Zeitkonstante ein, so folgt aus der
obigen Gleichung die Beziehung:
y R (t ) K P [ x d (t )
1
Tn
x
d
(t )dt ] .
119
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
Führt man die Laplace-Transformation durch
YR ( s ) K P [ X d ( s )
1 1
X d ( s )]
Tn s
so lässt sich die Übertragungsfunktion der PI-Regeleinrichtung bestimmen:
FR ( s)
YR ( s)
1
K P 1
X d ( s)
s Tn
.
Die komplexe Schreibweise:
FR ( j )
y R ( j )
1
K P 1
xd ( j )
j Tn
1 j Tn
K P
j Tn
a) Sprungantwort:
0 t 0
xd (t )
xd 0 t 0
1
YR ( s ) X d ( s ) K P 1
s Tn
1
1
x d 0 K P 1
s
s Tn
1 1 1
x d 0 K P 2
s s Tn
Die Laplace-Rücktransformation ergibt dann die Funktion der Sprungantwort im Zeitbereich
wie folgt:
t
y R (t ) xd 0 K P 1 .
Tn
Sprungantwort einer PI-Regeleinrichtung
120
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
b) Ortskurve:
FR ( j )
y R ( j )
1
K P 1
xd ( j )
j Tn
ReFR ( j ) K P
ImFR ( j )
KP
Tn
Der Realteil der Übertragungsfunktion
ist konstant
ReFR ( j) K P
frequenzunabhängig. Für den imaginären Teil der Übertragungsfunktion gilt:
und
0 ImFR ( j )
1
ImFR ( j ) K P
Tn
ImFR ( j ) 0
Stabilisierung nach Nyquist:
Senken der Betragskennlinie:
Die Durchtrittsfrequenz wird nach links verlegt. Links ist die höhere Phasenlage, d.h. höhere
Stabilität und genügende Phasenlage. Der Regelkreis wird aber langsamer (Kompromisse
erzielen!).
Die Stabilisierungseffekte eines geschlossenen Regelkreises lässt sich anhand des offenen
Regelkreises ermitteln.
121
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
Beispiel (Föllinger):
Der offene Regelkreis besteht aus der Serienschaltung von Regler und Strecke.
Die Übertragungsfunktion der Strecke:
1
1
1
1 0.3 j 1 0.2 j 1 0.05 j
1
1
1
15
1 Tn1 j 1 Tn 2 j 1 Tn3 j
FS ( j ) 15
Tn1 , Tn 2 und Tn3
D1
sind die Zeitkonstanten der Strecke. Die Kehrwerte davon sind
1
1
1
1
1
1
3.33, D 2
5 und D 3
20
Tn1 0.3
Tn 2 0.2
Tn 3 0.05
die Knickfrequenzen des Frequenzganges.
Die Übertragungsfunktion des Reglers:
FR ( j ) K R
1 0.3 j
.
j
Bemerkung:
Die Übertragungsfunktion des Reglers wurde davor ermittelt durch die Beziehung:
FR ( s)
YR ( s)
1
K P 1
X d ( s)
s Tn
.
Der rechte Term der obigen Gleichung lässt sich schreiben durch:
1 s Tn
1
K P
K P 1
s Tn
s Tn
.
Man geht davon aus, dass der Zähler 1 s Tn der obigen Gleichung mit dem Glied der
höchsten Zeitkonstante der Strecke identisch ist, so dass die beiden Terme sich wegkürzen (In
der Technik üblich und sehr wichtig!). In der obigen Gleichung bleiben dann die Faktoren
übrig:
1
K P
s Tn
.
Setzt man für die Zeitkonstante
122
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
Tn
KP
KI
ein, so folgt:
1
KP
KP
s
KI
K 1
I
s
Damit ergibt sich die Gesamtübertragungsfunktion des offenen Regelkreises:
F0 ( j ) FR ( j ) FS ( j )
1 0.3 j
1
1
1
15
j
1 0.3 j 1 0.2 j 1 0.05 j
1
1
1
K R 15
j 1 0.2 j 1 0.05 j
KR
V
Nun wird der Verstärkungsfaktor K R aus dem Frequenzgang des offenen Regelkreises bei
unterschiedlichen Phasenreserven ermittelt und anschließend die Sprungantwort des
geschlossenen Regelkreises beobachtet (Stabilitätsverhalten).
Angenommen, dass V nicht bekannt ist, d.h. wir setzen in der Gesamtübertragungsfunktion
des offenen Regelkreises V 1 ein:
F0 ( j )
1
1
1
.
j 1 0.2 j 1 0.05 j
Der Amplitudengang verfügt über zwei Knickfrequenzen bei
D1
1
5
0.2
und
1
1
20 . Die Kennlinie des Integralanteils
fällt mit 20dB/Dek bis zur ersten
0.05
j
Knickfrequenz ab.
D1
123
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
Für den Phasengang gilt:
1
1
1
1
1
2
2
3
j 1 0.25 j 0.01
0.25 j 1 0.01 2
j 0.25 j 0.01
F0 ( j )
1
0.25 j 1 0.01 2
0.25 j 1 0.01 2 0.25 j 1 0.01 2
1
1 0.01
1 0.25 j 1 0.01 1 0.25
j
2
N
2
N
N
ImF0(jωj
1 0.01ω 2
artan
0.25ω
ReF0(jωj
arctan
Bemerkung: Die Verstärkung V lässt sich auf der Kennlinie des Frequenzganges durch 1
bestimmen
Übung:
FS ( s )
KS
X (s)
YR ( s ) 1 sT1
FR ( s )
1 sTn
YR ( s )
KP
X d (s)
sTn
KS
1 sTn
KP
FS ( s ) FR ( s )
1 sT1
sTn
K S K P (1 sTn )
X (s)
FW ( s )
KS
1 sTn (1 sT1 ) sTn K S K P (1 sTn )
W ( s ) 1 FS ( s ) FR ( s )
1
KP
1 sT1
sTn
FW ( s )
K S K P (1 sTn )
K S K P (1 sTn )
2
sTn s T1Tn K S K P sK S K P Tn s T1Tn s (Tn K S K P Tn ) K S K P
2
KS KP
(1 sTn )
T1Tn
2 (1 sTn )
FW ( s )
2
1 KsKP KsKP
s s 2 2
s2 s
T1
T1Tn
T1 Tn
W (s) 0
1
: Führungsgröße ist eine Sprungfunktion
s
X ( s) 0
2 (1 sTn )
2Tn
2
0
2
2
2
2
2
2
s( s s 2 )
s( s s 2 ) s s 2
124
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
K S 2; T1 20s; K I 0.1s 1 ; Tn
KP
25s; K P 2.5
KI
2
KS KP
2 * 2.5
0.01 0.1
T1Tn
20 * 25
2
1 K S K P 1 2 * 2.5
0.3 0.15
T1
20
0.01
0.25
X ( s) 0 2
2
s( s s0.3 0.01) s s0.3 0.01
s 2 s 0.3 0.01 0
0.3 (0.3) 2 4 *1 * 0.01 0.3 0.2236
2 *1
2
s1 0.2618
s1, 2
s 2 0.0382
0.01
0.25
X ( s) 0
s( s 0.2618)( s 0.0382) ( s 0.2618)( s 0.0382)
1
A
B
C
s ( s 0.2618)( s 0.0382) s s 0.2618 s 0.0382
A( s 0.2618)( s 0.0382) Bs ( s 0.0382) Cs( s 0.2618)
s ( s 0.2618)( s 0.0382)
A( s 2 0.3s 0.01) Bs 2 Bs 0.0382 Cs 2 Cs0.2618
s ( s 0.2618)( s 0.0382)
s 2 ( A B C ) s ( A0.3 B0.0382 C 0.2618) A0.01
s ( s 0.2618)( s 0.0382)
125
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
A BC 0
0.3 A 0.0382 B 0.2618C 0
0.01A 1
A 100
100 B C 0
30 0.0382 B 0.2618C 0
B 100 C
30 0.0382(100 C ) 0.2818C 0
30 3.82 0.0382C 0.2818C 0
0.2236C 26.18
C 117.08
B 17.08
1
A
B
A( s 0.0382) B( s 0.2618)
( s 0.2618)( s 0.0382) s 0.2618 s 0.0382
( s 0.2618)( s 0.0382)
s( A B) 0.0382 A 0.2618B
( s 0.2618)( s 0.0382)
A B 0
0.0382 A 0.2618 B 1
A B
0.0382 B 0.2618B 1
0.2236 B 1
B 4.472
A 4.472
0.01
0.25
X ( s) 0
s( s 0.2618)( s 0.0382) ( s 0.2618)( s 0.0382)
17.08
117.08
4.472
100
4.472
0 0.01
0.25
s 0.2618 s 0.0382
s
s 0.2618 s 0.0382
0.1708
1.1708
1.117
1.117
1
0
s s 0.2618 s 0.0382 s 0.2618 s 0.0382
0.9462
0.0538
1
0
s s 0.2618 s 0.0382
126
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
Sprungantwort:
x(t ) 0 1 0.9462e 0.2618*t 0.0538e 0.0382*t
Step Response
1
0.9
0.8
0.7
Amplitude
0.6
0.5
0.4
0.3
0.2
0.1
0
5
0
15
10
Time (sec)
Regelabweichung:
lim x(t ) lim s X ( s)
t
s 0
0.9462
0.0538
1
lim s
s 0
s s 0.2618 s 0.0382
1
x d (t ) w(t ) x(t )
x d (t ) 1 1 0
127
20
25
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
Frequenzgang von Übertragungselementen
Am Eingang eines linearen Übertragungselements F( j) liegt ein sinusförmiges Eingangssignal
x e ( j) x e cos(t) jsin(t)
x e e jt
.
Nachdem die Einschwingvorgänge abgeklungen sind, ändert sich das Ausgangssignal
x a ( j) x a e
j t ( )
des Übertragungselementes nach einer harmonischen Funktion mit der gleichen Frequenz wie die des
Eingangssignals. Die Amplitude und die Phasenlage der Eingans- und Ausgangssignale sind aber
verscheiden (Abb. 1).
Eingangsgröße
Ausgangsgröße
x e ( j) x e cos(t) jsin(t)
x e e jt
F( j)
x a ( j) x a e
j t ( )
lineares
Übertragungselement
Abb.1: Lineares Übertragungselement mit Ein- und Ausgangsgrößen
Die Kreisfrequenz des Eingangssignals bestimmt im Allgemeinen das Verhältnis x a / x e der
Amplituden und die Phasenverschiebung , (Abb.2).
128
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
Der Frequenzgang F( j) ergibt sich als Quotient aus Ein- und Ausgangssignals wie folgt:
F( j)
x a ( j) x a e jt e j( ) x a e j( ) x a j( )
e
x e ( j)
x a e jt
xa
xa
Abb.2: Eingangs- und Ausgangskennlinien eines linearen Übertragungselementes
Aus
der
letzten
Gleichung
ist
zu
entnehmen,
dass
der
Frequenzgang
F( j)
eines
Übertragungssystems das Verhältnis der sinusförmigen Ausgangsschwingung zur sinusförmigen
Eingangsschwingung für alle Kreisfrequenzen in komplexer Form darstellt.
Der Frequenzgang F( j) ist eine komplexe Größe, die sich entweder in Real- und Imaginärteil
F(j) Re F(j) j Im F(j)
oder in Betrag und Phase der komplexen Darstellung
F( j) F( j) e j
formuliert.
129
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
Demnach gilt für den Betrag des Frequenzganges
F( j) Re2 F( j) Im2 F( j)
und für die Phase
F( j) arctan
Beispiel:
130
Im F( j)
.
Re F( j)
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
131
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
Bestimmung des Verhältnisses der sinusförmigen Ausgangsschwingung zur sinusförmigen
Eingangsschwingung:
132
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
F( j)
xa
xe
e j
0.70707 j
e 0.70707 e j
0.99994
Und für die Phase gilt:
dT=0.79670
133
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
Die halbe Periodendauer beträgt nach der obigen Messung dT=3.13187. Danach gilt für die
Phasenverschiebung zwischen Ein- und Ausgangsschwingung des Übertragungssystems:
3.13187 180
0.79670
.
45.789
Für den Frequenzgang gilt dann:
F( j)
xa
e j
0.70707 j
e 0.70707 e j45.789
0.99994
xe
0.70707 cos 45.789 jsin 45.789
0.70707 0.6973 j0.7167
0.493 j0.506
Für den Betrag und Phase gilt dann:
F( j)
0.493)
2
0.506
2
0.7064
arctan
0.506
arctan(1.0263) 45.74 .
0.493
134
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
Frequenzgang Lissajous-Figur
Die beiden im unteren Bild dargestellten zwei Signalverläufe sind um φ = -315° phasenverschoben
(Abb. 3 und 4). Man bestimmt zunächst die Amplitudenwerte der beiden Signalverläufe zu beliebigen
Zeitpunkten und ordnet den einen Amplitudenwert für die x-Achse und den anderen für y-Achse ein.
Der Schnittpunkt dieser beiden Größen bildet einen Punkt auf die Lissajous-Figur.
Abb. 3: Zeitverzögerte Signalverläufe
Abb. 4: Zeitverzögerte Signalverläufe gemessen mit dem Oszilloskop
Wiederholt man den Vorgang unter Berücksichtigung weiteren Amplitudenwerten zu weiteren,
mehreren Zeitpunkten und verbindet man dann deren Schnittpunkte miteinander, so entsteht die
komplette Lissajous-Figur, wie im unteren Bild dargestellt ist (Abb. 5, Simulationsprogramm
winFACT-BORIS)
135
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
Abb. 5: Gemessene Signalverläufe in x-y-Betrieb (Lissajous-Figur)
Den gleichen Verlauf erzielt man auch wenn man die einzelnen Amplitudenwerte zu gegebener Zeiten
bestimmt und z.B. die Darstellung in EXCEL durch xy-Format aufzeichnet (Abb. 6 und 7).
Abb. 6: Gemessene Amplituden zu den Zeitpunkten t 0,1s für eine Periodendauer von T 6,28s
d.h. f 1Hz
136
Prof. Dr.-Ing. Cihat Karaali
__________________________________________________________________________________
Abb. 7: Mit Hilfe des Grafikprogramms EXCEL erstellte Lissajous-Figur
Auch aus dem Konstruktionsbild der Lissajous-Figur lässt sich der Frequenz- und Phasengang des
linearen Übertragungsgliedes bestimmen (Siehe Laboraufgaben Regelungstechnik).
137