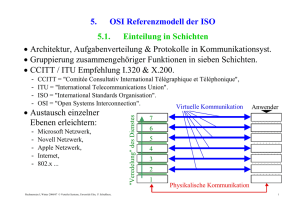
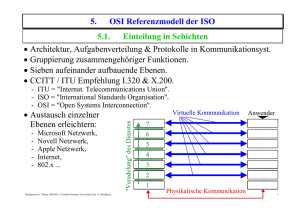
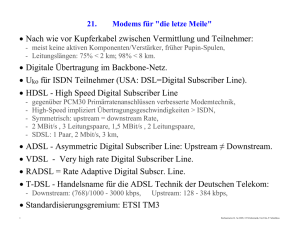
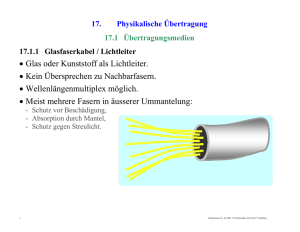
Blätter zur Vorlesung - Institut für Verteilte Systeme
Werbung

24. Global Positioning System (GPS) Amerikanisches Satellitennavigationssystem. 24.1 Einsatzbereiche Militärische & zivile Positionsbestimmung: - Zielfindung für Marschflugkörper, Systeme zur Flugsicherung, Orientierung im Gelände, Fahrerassistenzsysteme, passives System ! Seismische Messungen: - Unregelmässigkeiten der Erdkugel, - dyn. Verformungen der Erdkugel, - Landvermessung. Nutzung als Zeitnormal ... 1 Rechnernetze II, P. Schulthess, 2002, ©VS Informatik, Ulm 24.2 24.2.1 Grundprinzip Triangulation Jeder Satellit sendet Position und Uhrzeit. Empfänger bestimmt seine Position durch Triangulation. Eigentlich genügen 3 Satelliten für eine Position auf der Erdoberfläche. Ausgleichsrechnung bei mehr Satelliten. x, y, z t Bodenstationen senden Korrekturpolynome. 2 Rechnernetze II, P. Schulthess, 2002, ©VS Informatik, Ulm 24.2.2 Geometrische Orte 2 Orte auf der Erdoberfläche mit 2 Satelliten. Im dreidimensionalen Raum mit drei Satelliten. Ohne eigene genaue Uhr mit viertem Satellit. 3 Rechnernetze II, P. Schulthess, 2002, ©VS Informatik, Ulm 24.2.3 Nominale GPS Konstellation 24 Satelliten in 6 Umlaufbahnen. 4 Statelliten pro Bahn 55 Grad Inklination 20200 km Höhe. 4 Rechnernetze II, P. Schulthess, 2002, ©VS Informatik, Ulm 24.2.4 Reserve-Satelliten 24 aktive Satelliten. ~3 Reservesatelliten. 6 verschiedene Bahnen. 12 Äquatorschnittpkte. Quelle: Peter H. Dana Satelliten gelegentlich zu Wartungszwecken abschalten. Reservesatelliten werden auf die 6 Umlaufbahnen verteilt. Wegen Treibstoffverbrauchs keine Umsteuerung zwischen Bahnen. 5 Rechnernetze II, P. Schulthess, 2002, ©VS Informatik, Ulm 24.3 24.3.1 Realisierung Bei-Spielgerät Elektronische Wanderhilfe: - Geschwindigkeit & Weg, Satellitenkonstellation, Höhenmesser, Landkarte ... Unterschiedliche Kartographierungssysteme einstellbar 6 Rechnernetze II, P. Schulthess, 2002, ©VS Informatik, Ulm 24.3.2 GPS Navigation Message Masterframe: - 12,5 min, 750 sec, - 25 Basic Messages. Basic Message/ Frame: - 30 sec Dauer, - 5 Subframes à je 6 sec, - 5*10 Wörter à je 30 Bits. System Info (Almanach) Master Frame . . . Subframe Subframe Subframe Subframe Subframe Basic Message Subframe [1..3]: - Polynom für Zeitkorrektur, - Zeit & Umlaufbahn dieses Satelliten. Subframe [4..5] : - 2 Seiten aus dem Almanach für alle Satelliten. 7 Almanach (="Sternkalender") - Umlaufkalender für alle Satelliten, Systemdaten (Integrität, ... ), alle 750 sec wiederholt, besteht aus 50 Seiten. Rechnernetze II, P. Schulthess, 2002, ©VS Informatik, Ulm 24.3.3 Modulation: Spreizspektrumverfahren: - direct sequence spread spectrum, ziviler Code(C/A): 1 MHz Chiprate, militärischer Code (P): 10 MHz Rate, Einstieg in P-Code über zivilen Code. C/A Datenrate ist 50 Bit/sec. C/A-PRN (Coarse Acquisition): - 1023 Bit Pseudorandom-Code: Wiederholung 1000 mal / sec, Ergibt 1023 KHz Bandbreite, Spreizfaktor 20000. P-PRN (Precision Code): L1 Träger 1.57 GHz C/A-PRN ~1 MHz C/A Data P-Data P-PRN ~10 MHz 1.22 GHz L2 Träger - 10.23 MHz Chiprate, - Periode 267 Tage. Y-Code nach der Entschlüsselung. 8 Rechnernetze II, P. Schulthess, 2002, ©VS Informatik, Ulm 24.3.4 Signaleigenschaften Codierung: Atomuhren im Satelliten: - Früher Cäsium, neuerdings Rubidium, - Cäsium Uhren sind eher wartungsintensiv, - Mehrere Uhren aus Redundanzgründen. Nutzung als Zeitnormal: Multiplier - Unverschlüsselte Nachricht ungenau, - Max. Genauigkeit nur für Militär, - Abgeschaltet seit 1.4.2000. Oszillator "Selective Availability": Atom-Resonator - Unterschiedlicher Code für jeden Satelliten, - z.B. mit rekursivem 10 Bit Schieberegister, - 32 Satelliten & 51 „Pseudoliten“. *X Regelung - Für verteilte Anwendungen und LAN/WAN Protokolle, - Alternative zum DCF77 Signal. 9 Rechnernetze II, P. Schulthess, 2002, ©VS Informatik, Ulm 24.3.5 Differentielles GPS Korrektur über Radio Modem und serielle Schnittstelle am Empfänger. Kurze Distanzen zwischen fester & mobiler Station. Genau vermessene Referenzstation am Boden. Feste Station berechnet Differenzsignal: - für alle sichtbaren Satelliten, - relativ zur eigenen Position, - in Echtzeit ... "WAIS" geplant: = Wide Area Augmentation System, - Flächendeckendes Korrektursystem, - Lokale Ausbreitungsbedingungen, - Verteilung über Satelliten, - Satellitenzustand. 10 Rechnernetze II, P. Schulthess, 2002, ©VS Informatik, Ulm 24.4 Genauigkeit der Messung Einzelner C/A Chip: - Ungefähr 1 µsec bzw. 290 m, - Genauigkeit ca. 10 m ... Einzelner P-Code Chip: - für militärische Anwendungen, - ca. 0.1 µsec bzw. 29 m, - ca. 1 m genau. Überlagerte Fehlerquellen: - Mehrwegeausbreitung, - ionosphärische Dispersion, - Wolken in der Troposhäre. Synchronisieren auf Trägerphase: - Periodendauer ca. 0.6 nsec bzw. 20 cm, - Synchronität unterwegs beibehalten, - ~ 1 cm genau, für Vermessungen ... Selective Availability: - Degradation des Zeitstempels in der C/A-Message, - Verschlüsselung der Korrektur im P-Code, - überlisten durch Chip-Synchronisierung. 11 Rechnernetze II, P. Schulthess, 2002, ©VS Informatik, Ulm