2.2 Grundgesetze der Dynamik
Werbung

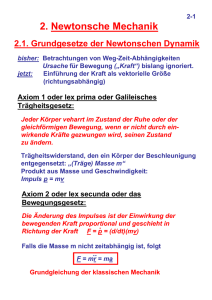
2.2 Grundgesetze der Dynamik In dem vorangegangenen Abschnitt zur Kinematik habe wir die Bewegung von Massepunkten geometrisch-analytisch beschrieben. • Wir wissen also, wie sich ein Massenpunkt bewegt. • Die Fragen nach den Ursachen können wir jedoch noch nicht beantworten. • Dieser Fragestellung widmet sich die Dynamik 2.2.1 Erstes Newtonsches Axiom Erstes Newtonsches Axiom (Trägheitsprinzip) Ein Körper bleibt in Ruhe oder bewegt sich mit konstanter Geschwindigkeit (Betrag und Richtung) weiter, wenn keine resultierende Kraft auf den Körper einwirkt. Die Eigenschaft eines Körpers seinen Bewegungszustand beizubehalten, bezeichnet man als Trägheit. Daher bezeichnet man das erste Newtonsche Axiom auch als Trägheitsgesetz. Früher (vor Galilei) nahm man an, dass stets eine Kraft wirken muss um einen Körper in Bewegung zu halten. Alltagserfahrung Ein gezogener Schlitten gleitet nach dem Loslassen ein Stück weiter und bleibt schließlich stehen. Galilei und Newton erkannten aber, dass sich der Schlitten aufgrund von Reibung nicht kräftefrei bewegt. Galilei Experiment (motiviert 1tes Newtonsches Axiom) h ϑ ϑ' Die Bälle bewegen sich unabhängig vom Neigungswinkel der Schräge fast wieder bis zu ihrer ursprünglichen Höhe h . 1) Je kleiner der Neigungswinkel ϑ wird, um so weiter rollt der Ball nach rechts. 2) Bei Vernachlässigung der Reibung wird der Ball auf einer horizontalen Ebene, d.h. ϑ = 0 , für immer und ohne Geschwindigkeitsänderung weiterrollen. Dieser Sachverhalt motivierte die Formulierung des ersten Newtonschen Axioms. Bezugssystem, Inertialsystem Das 1te Newtonsche Axiom unterscheidet nicht zwischen einem ruhenden und einem sich gradlinig gleichförmig, d.h. mit konstanter Geschwindigkeit (Betrag und Richtung), fortbewegenden Körper. Ob ein Körper ruht oder sich mit konstanter Geschwindigkeit bewegt, hängt von dem für die Betrachtung der Bewegung gewählten Koordinatensystem ab. Gedankenexperiment y' S' Eisenbahnwaggon Gegenstand Luftkissentisch O' a) x' Der Gegenstand befindet sich in dem Koordinatensystem S ', dessen Ursprung O' mit dem Waggon verbunden ist, in Ruhe. y S y' S ' v O' O b) x' x Der Gegenstand befindet sich relativ zum Waggon, d.h. relativ zum Bezugssystem S ' in Ruhe. Die Geschwindigkeit v wird relativ zum Koordinatensystem S , das mit den Schienen verbunden ist, gemessen. Relativ zum Bezugssystem S bewegt ich der Gegenstand mit der selben Geschwindigkeit v wie der Waggon nach rechts. y S y' ' S ' ' F a O' ' O c) x' ' x Der Eisenbahnwaggon starte zur Zeit t = 0 aus einer Ruheposition heraus. Der Gegenstand erfahre wegen des Luftkissens keine Reibung und bleibe relativ zum Bewegungssystem S in Ruhe, während sich der Luftkissentisch zusammen mit dem Waggon unter ihm hinwegbewegt. Im beschleunigten Bezugssystem S ' ' wird der Gegenstand mit − a nach hinten beschleunigt, d.h. er unterliegt ohne Krafteinwirkung einer horizontalen Beschleunigung. Um den Gegenstand im Bezugssystem S ' ' in Ruhe zu halten, ist die horizontale Kraft F nötig. ⇒ Das erste Newtonsche Axiom gilt nicht in beschleunigten Bezugssystemen. • Ein Bezugssystem heißt genau dann Inertialsystem, wenn das erste Newtonsche Axiom gilt. • Ein Bezugssystem, das sich relativ zu einem Inertialsystem mit konstanter Geschwindigkeit (Betrag und Richtung) bewegt, ist selbst auch ein Inertialsystem. • Ein mit der Erdoberfläche verbundenes Bezugssystem kann wegen der Erdbewegung genaugenommen kein Inertialsystem sein. • Ist die Erddrehung im Vergleich zum Zeitablauf eines Experiments vernachlässigbar langsam, so kann ein mit der Erdoberfläche verbundenes Bezugssystem in guter Näherung als Inertialsystem angesehen werden. 2.2.2 Zweites Newtonsches Axiom Zweites Newtonsches Axiom (Aktionsprinzip) Die Beschleunigung eines Körpers ist umgekehrt proportional zu seiner Masse und direkt proportional zur resultierenden Kraft, die auf ihn wirkt, d.h. r r F a= m bzw. r r F = ma • Eine Kraft ist die Größe, die einen Körper dazu bringt, seine Geschwindigkeit zu ändern, d.h. zu beschleunigen. • Die Kraft und die von ihr verursachte Beschleunigung zeigen in dieselbe Richtung. • Der Betrag der Kraft ist das Produkt aus der Masse und dem Betrag der Beschleunigung. • Wirken mehrere Kräfte gleichzeitig auf einen Körper ein, so beobachtet man, dass der Körper nur in eine Richtung beschleunigt wird, so als ob auch nur eine resultierende Kraft an ihm angreife. • Um die resultierende aus mehreren Teilkräften zu finden, setzt man diese unter Parallelverschiebung aneinander. Die Resultierende ist dann der Schlusspfeil des gebildeten Kraftecks. r F' Beispiel: r F2 r F1 r F2 r F'' r Fres r F1 Resultierende zweier Kräfte r Fres r F4 r F3 Geometrische Addition von Kräften r F2 r F3 r F1 r F1 r Fres r F4 Geometrische Addition von Kräften (das Krafteck) r F2 r F3 Drei Kräfte im Gleichgewicht Die Masse (genauer träge Masse) ist die jedem Körper innewohnende Eigenschaft, sich einer Beschleunigung zu widersetzen. Das Verhältnis zweier Massen kann wie folgt definiert werden. Eine Kraft F wirke auf zwei Körper der Masse m1 bzw. m2 und erzeuge die Beschleunigung a1 bzw. a2 , d.h. F = m1a1 und F = m2 a2 Gleichsetzen liefert F = m1a1 = m2 a2 und nach Umformen die Definition der Masse m1 a2 = m2 a1 Mit diesem Gesetz können Massen verglichen, z.B. aus m2 = 2m1 und m3 = 4m1 ⇒ m3 = 2m2 , und eine Massenskala mittels eines Standartkörpers, dessen Masse man als Masseneinheit festlegt, definiert werden. Die Einheit der Kraft ist 1 Newton [N] und entspricht jener Kraft, die benötigt wird, um einen Körper der Masse 1kg mit 1m/s 2 zu beschleunigen. Aus den Definitionen der zuvor eingeführten Begriffe der Kraft und Masse folgt direkt das 2te Newtonsche r Axiom 2r r r dv d r =m 2 F = ma = m dt dt Das 2te Newtonsche Axiom verbindet die • dynamischen Größen - Masse und Kraft mit den • kinematischen Größen - Beschleunigung, Geschwindigkeit und Verschiebung Impuls Der Impuls ist definiert als r r p = mv Newton hat das 2te Axiom selbst etwas allgemeiner formuliert. Wenn eine Kraft auf einen Körper wirkt, so ändert sich sein Impuls. r r dpr d (mvr ) dm r dv = = F= v +m dt dt dt dt Ist die Masse keine Funktion der Zeit, so gilt r r dpr r dv F= =m = ma dt dt Übungsaufgabe 7 Gewichtskraft r Die Gewichtskraft FG eines Körpers ist die Gravitationskraft zwischen dem Körper und der Erde. Sie ist proportional zur Masse m und zur Erdbeschleunigung r g , durch die das Gravitationsfeld der Erde definiert wird und die mit der Beschleunigung des freien Falls übereinstimmt, d.h. r r FG = m g Die Gewichtskraft ist keine körpereigene Eigenschaft. Sie ist wie die Beschleunigung ortsabhängig. 2.2.3 Drittes Newtonsches Axiom Drittes Newtonsches Axiom (Reaktionsprinzip) Kräfte treten immer paarweise auf. Wenn ein Körper A eine Kraft auf einen Körper B ausübt, so wirkt eine gleich große, aber entgegengesetzt gerichtete Kraft von Körper B auf Körper A. Im Zusammenhang mit dem 3ten Newtonschen Axiom werden häufig die Begriffe • • Kraft und Gegenkraft verwendet, d.h. wenn ein Körper A eine Kraft auf einen Körper B ausübt, dann wird die Kraft, mit der B umgekehrt auf A einwirkt, als Gegenkraft bezeichnet. Kraft-Gegenkraft-Paar r FT ' Kraft Gegenkraft r FT Körper r FG r FG ' r Die Gewichtskraft FG ist die Kraft, die von der Erde auf den Körper ausgeübt wird. Eine r gleich r große, aber entgegengesetzt gerichtete Kraft FG ' = − FG wirkt als Gegenkraft vom Körper auf die Erde. r Der Tisch wiederum übt eine Kraft FT auf den Körper aus, da sonst der Körper nach unten beschleunigt würde. r Der rKörper wirkt seinerseits mit der Gegenkraft FT ' = − FT auf den Tisch ein. Kraft und Gegenkraft wirken auf verschiedene Körper, so dass sich diese Kräfte niemals gegeneinander aufheben können. 2.2.4 Kräfte und Scheinkräfte Fundamental Kräfte Alle Kräfte, denen wir in der Natur begegnen, können durch vier grundlegende Wechselwirkungen erklärt werden. • Gravitationswechselwirkung • elektromagnetische Wechselwirkung • starke Wechselwirkung (Protonen und Neutronen, die den Zusammenhalt des Atomkerns bewirken) • schwache Wechselwirkung (zwischen Elektron und Proton oder Neutron) Die meisten Kräfte, die auf makroskopische Gegenstände des Alltags einwirken, wie die Kontaktkräfte, die von Federn, Seilen oder Oberflächen ausgeübt werden, beruhen auf molekularen Kräften. Sie sind letztlich eine Folge elektromagnetischer Wechselwirkungen. Für die meisten Anwendungen ist eine empirische Beschreibung des makroskopischen Verhaltens hinreichend. Kontaktkräfte Federkraft (Rückstellkraft) Ein zusammengedrückte oder auseinandergezogene Feder nimmt nach dem Loslassen ihre ursprüngliche Form an, vorausgesetzt, die Stauchung oder Dehnung war nicht zu groß. Bei zu großen Auslenkungen, d.h. oberhalb einer gewissen Grenze, wird die Feder dauerhaft verformt. Experimentell beobachtet man, dass bei kleinen Auslenkungen ∆x die Federkraft proportional zu ∆x ist und entgegen der Auslenkungsrichtung wirkt. Dieser Sachverhalt ist als Hooksches Gesetz Fx = −c ( x − x0 ) = −c ∆x bekannt, wobei die Proportionalitätskonstante c als Federkonstante bezeichnet wird. Körper x = x0 Fx = 0 x a) Wenn die Feder weder gedehnt noch gestaucht ist, übt sie auch keine Kraft auf den Körper aus. ∆x Fx Fx = −c ∆x ist negativ da ∆x positiv x x = x0 b) Wenn die Feder gedehnt wird, d.h. ∆x > 0 ,dann greift die Kraft in negativer x-Richtung mit dem Betrag c ∆x am Körper an. ∆x Fx = −c ∆x ist positiv, da ∆x negativ Fx x = x0 x c) Wenn die Feder gestaucht wird, d.h. ∆x < 0 ,dann greift die Kraft in positiver x-Richtung mit dem Betrag c | ∆x | am Körper an. Normalkraft, Hangabtriebskraft y r FH r FE x ϑ r FN ϑ r r FG = m g Die Gewichtskraft führt bei Körpern auf einer schiefen Ebene mit dem Neigungswinkel ϑ zu einer senkrecht auf dier schiefe Ebene wirkenden Kraft, der Normalkraft FN , mit dem Betrag FN = m g cos ϑ und zu einer parallel zur schiefen Ebene gerichteten r beschleunigenden Kraft, der Hangabtriebskraft FH mit dem Betrag FH = m g sin ϑ Übungsaufgabe 8 Festkörperreibungskraft Körper r F Boden r FR , H Beim Versuch, einen großen Gegenstand zu schieben, wirkt die Reibung einer Bewegung r entgegen. Der Boden übt eine Haftreibungskraft FR , H aus, die die aufgewendete Kraft ausgleicht, so lange F < FR ,H max. Intuitiv könnte man vermuten, dass die Haftreibungskraft proportional zur Größe der Berührungsfläche ist. Experimentell zeigt sich jedoch, dass die Haftreibung • nicht von der Größe der Berührungsfläche abhängt • proportional zur Normalkraft ist, die eine Oberfläche auf die andere ausübt • von der Oberflächenbeschaffenheit der beteiligten Körperflächen abhängt. Die maximale Haftreibungskraft ergibt sich folglich zu FR , H max = µ H FN wobei der Proportionalitätsfaktor µ H als Haftreibungszahl bezeichnet wird und von der Oberflächenbeschaffenheit der Berührungsfläche abhängt. Allgemein gilt für die Haftreibungskraft FR , H ≤ µ H FN Bei einer Kraft F > FR , H max gerät der Gegenstand in Bewegung. Um den Gegenstand mit konstanter Geschwindigkeit weiterbewegen zu können, muss jetzt eine Kraft aufgebracht werden, die die Gleitreibungskraft kompensiert, d.h. Gleitreibung wirkt ebenfalls der Bewegung entgegen. Die Gleitreibung ist definiert als FR ,G = µ G FN wobei µ G die Gleitreibungszahl angibt. Experimentell ergibt sich • µ G ist kleiner µ H • µ G hängt von der Relativgeschwindigkeit der Oberflächen ab. Im Geschwindigkeitsbereich von 1cm/s bis zu mehreren Metern pro Sekunde kann als näherungsweise konstant angesehen werden. • µ G hängt wie µ H von der Beschaffenheit der Kontaktflächen, nicht aber von der Größe der makroskopischen Fläche ab. FR Reibungskraft FR , H max = µ H FN FR ,G = µ G FN FR , H = F eingesetzte Kraft F Übungsaufgabe 9 Eine dritte Variante der Festkörperreibung ist die sogenannte Rollreibung. Während z.B. ein Autoreifen rollt, müssen sich die Kontaktflächen ständig voneinander lösen. Außerdem verformt sich die Oberfläche. Wie bei der Gleitreibung, erfasst man alle zur Rollreibung beitragenden Einflüsse pauschal durch eine Rollreibungszahl µ R , wobei die Rollreibungskraft vereinfacht durch FR , R = µ R FN definiert ist. Übungsaufgabe 10 Scheinkräfte, Trägheitskräfte Die Newtonschen Gesetze gelten nur in Inertialsystemen, d.h. in ruhenden oder gradlinig gleichförmig bewegten Bezugssystemen. Sie gelten nicht in beschleunigten Bezugssystemen. Sie lassen sich aber trotzdem anwenden, wenn man Scheinkräfte einführt, die von der Beschleunigung des Bezugssystems abhängen. Translationsbeschleunigte Bezugssysteme Gegenstand auf Luftkissentisch im beschleunigten Eisenbahnwaggon. y S y' ' S ' ' r FS r F m r a O' ' O x' ' x Das 2te Newtonsche Axiom kann im Bezugssystem des Waggons nur dann angewendet werden, wenn wir die Scheinkraft (Trägr r heitskraft) FS = − m a einführen. d‘Albertsches Prinzip In Bezug auf ein mit einem beschleunigten Körper mitbewegtes Bezugssystem befindet sich dieser in Ruhe. Die Vektorsumme aller am Körper angreifender Kräfte r Fn (n = 1, 2,K, N ) einschließlich der Scheinkraft r r FS = −m a ist stets gleich Null N r r r r r r ∑ Fn + FS = Fres + FS = Fres − m a n =1 Übungsaufgabe 11 Rotierende Bezugssysteme Eine mit einer rotierenden Scheibe fest verbundenes Bezugssystem ist kein Inertialsystem, denn jeder Punkt auf der Scheibe bewegt sich auf einer Kreisbahn und besitzt demzufolge eine Zentripetalbeschleunigung. 1tes Experiment: Ein Körper ist über ein Seil mit dem Mittelpunkt einer rotierenden Scheibe verbunden. a) Für einen neben der Scheibe stehenden Beobachter (INS) bewegt sich der Körper auf einer Kreisbahn mit der Zentripetalbem schleunigung, die von r r a der Zugkraft (der Zenr F v tripetalkraft) zp zp r Fzp = Fzp v2 = m a zp = m r im Seil aufgebracht wird. b) Für einen Beobachter auf der Scheibe befindet sich der Körper in Ruhe. Damit das 2te NewtonscheAxiom gilt, muss eine r F Scheinkraft, die Zentrim fugalkraft r zf Fzp r r Fzf = − Fzp r r v2 Fzf = Fzf = Fzp = r eingeführt werden, die nach außen wirkt und die Zentripetalkraft ausgleicht. Damit das zweite Newtonsche Axiom in rotierenden Bezugssystemen gilt, muss neben der Zentrifugalkraft noch eine weitere von der Geschwindigkeit des Körpers abhängende Scheinkraft, die Coriolis-Kraft, eingeführt werden. 2tes Experiment: Vom Zentrum einer rotierenden Scheibe wird eine Kugel mit der Geschwindigkeit v horizontal abgeworfen. a) In einem Inertialsystem bewegt sich die Kugel geradlinig und verpasst den Fänger, weil sich dieser mit der Scheibe weggedreht hat. Fänger Fänger Werfer Werfer t = t0 + ∆t t = t0 Beobachter Beobachter b) Im Bezugssystem der rotierenden Scheibe ist der Fänger in Ruhe und die Kugel wird nach rechts abgelenkt. Die Scheinkraft, die die Kugel von der gradlinigen Bahn abbringt, heißt Coriolis-Kraft. t = t0 t = t0 + ∆t Fänger Fänger Werfer Werfer Beobachter Beobachter r ∆s Die Coriolis-Beschleunigung/Kraft erhält man wie folgt Verschiebung: für t0 = 0, s0 = 0 ⇒ radial r = vt lateral s = vω t 2 ∆s = s − s0 = s, ∆t = t − t0 = t gilt (r = v ∆t ) (∆s = r 2π n ∆t = r ω ∆t = v ω ∆t ) 2 wobei n = T1 die Drehzahl, ω = 2Tπ die Winkelgeschwindigkeit und T die Dauer einer Umdrehung bezeichnet. Coriolis-Beschleunigung: Coriolis-Kraft: r d 2s ac = ac = 2 = 2 v ω dt r Fc = Fc = m ac = 2 m v ω Beispiel: a) Einfluss der Zentrifugalbeschleunigung auf die Erdbeschleunigung. b) Wirkung der Coriolis-Kraft auf der Erde.