Abschlußprüfung - Stichpunktzettel zum üben
Werbung

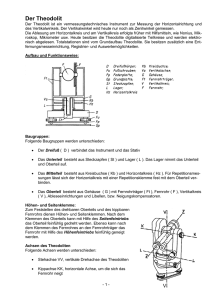
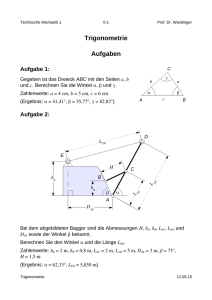
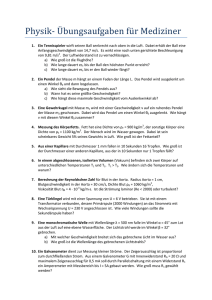
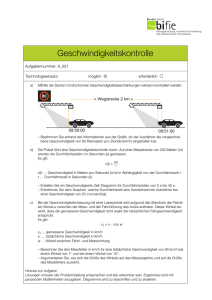
Abschlußprüfung - Stichpunktzettel zum üben Schreibweise von Maßzahlen (Anhang1 im Ordner1) Verlängerung: 37.56 Endmaß: 37.56 Spannmaß: 37.56 Steinbreite: 37.56 Strebe: 37.56 Gerechnetes Maß: (37.56) Mehrere Punkte auf einer Senkrechten: 37.56 Gebäudevermessung: 37.56 Abgehende Meßlinie: 37.56 Einmessung eines topographischen Gegenstandes: 37.56 Schnittpunkt: 37.56 Angelegtes Maß: 37.56 Maßkontrollen (Anhang2 im Ordner1) Zur Kontrolle werden Streben, Steinbreiten und das Kopfmaß (jedes 2) in die Messung mit eingebracht. Eine Einfache Probe ist die Pythagorasprobe mit der man anhand von Streben den Zielpunkt kontrollieren kann. Wenn der Fehler in der kürzeren der beiden Grundseite ist kann man den Fehler nicht finden. Man merke ist der Winkel größer als 45° (50gon) wird der Zielpunkt nur durch die Gegenkathete Kontrolliert. Wenn der Winkel kleiner als 45° (50gon) ist wird der Zielpunkt nur durch dei Ankathete kontrolliert, erst wenn das Verhältnis der beiden Seiten 1:1 ist kann der Zielpunkt durch beide Seiten kontrolliert werden (maximales Seitenverhältnis von 2:1).. Ägypten (Anhang3 im Ordner1) Der Ursprung des Kataster- und Vermessungswesen wird auf 3000 v. Zw. Geschätzt. (Die Ägypter haben es wegen der besseren Besteuerung der einzelnen Grundstücke eingeführt). Erstes Kataster: Der Dorfschreiber hatte das Kataster zu führen. In der nächsthöheren Instanz gab es Abschriften. Gemessen wurde mit einem Leinenmessband (100Ellen). Durch einen Fehler waren alle Flächen nahezu doppelt so groß. Vermessungstechnische Beweisstücke bei den Ägyptern: Die Cheopspyramide (2500 v. Zw.), die Höhenmessung wurde mit einer simplen Setzwaage durchgeführt die sehr exakt die Höhe der Pyramide festlegte. Um einen rechten Winkel abzustecken wandten die Ägypter die Methode 3:4:5 an, da sie damals schon wussten das bei diesen Seitenverhältnis der eingeschlossene Winkel der beiden kurzen Seiten immer 90° ergibt. Pythagoras formulierte später einen Lehrsatz daraus: c² = a² + b². Die Erde ist keine Scheibe: 500 v. Zw. War Pythagoras davon überzeugt das die Erde keine Scheibe ist. Als erstes waren Seefahre davon überzeugt, da der Mann im Ausguck das Land immer als erstes sehen konnte und die anderen Seemänner am Deck noch das Meer sahen. Eratosthenes führte 250 v. Zw. Die erste Erdmessung durch. Er wusste das alljährlich die Sonne in Syene (Assuan) in einen tiefen Brunnen spiegelt und gleichzeitig ein Obelisk ind Alexandria einen Schatten wirft. Er berechnete mit einem Schattenstab den Winkel in Alexandria und ermittelte die Strecke zwischen Syene (Assuan) und Alexandria durch die Reisezeit einer Karamelkarawane. Der Rest wurde mit der Bogenformel berechnet. Er erreichte eine Genauigkeit von 7% zu heutigen Messungen. Al-Mamus aus Damaskus führte 1000Jahre später die zweite Messung durch. Von Lehrmitteln, Urkunden und Instrumenten: Seilspanner: Sie besaßen ein Leinenmessband von 100Ellen. Priester und Feldmesser waren für diese Aufgabe zuständig. Die Zahl 100 soll gleichzeitig die Bedeutung Seil gehabt haben. Formelsammlung: Der Papyrus RHIND ist die älteste Formelsammlung die gefunden wurde, benannt wurde sie nach seinem ersten westlichen Besitzer Alexander Henry RHIND (1858). Gefertig ca 2000 v. Zw., sie enthält verschiedene Formeln und Aufgaben. Außerdem wurde eine altbabylonische Keilschrifttafel auch aus dem Jahr 2000 v. Zw. Gefunden. Sie enthält Formeln von denen Euklid eine zum Lehrsatz erklärte h² = p *q . Der rechte Winkel und die Ebene (Grieschen): Dioptra: Dies ist ein universelles Winelmessinstrument. Heron beschrieb dieses ca 100 n. Zw. In Alexandria. Die Konstruktion war zu kompliziert und die Materialien waren zu teuer, deshalb diente es nur zur Forschung. Bei den Römern: Groma: Das Groma war ein Visiergerät zur Absteckung von rechten Winkeln. Chorobat: Das Chorobat diente zur Höhenmessungs und Schaffung einer Horizontalen. Vitruv beschrieb das Chorobat im 1. Jahrhundert v. Zw. Vermessungstechnische Beweisstück 550 v. Zw hat Eupalinos einen Tunnel durch den Berg „Kastro „ geführt. Als Hilfsmittel waren zu dieser Zeit die Höhenübertragung, Absetzen von rechten Winkeln und Streckenmesungen bekannt. Er begann den Bau von 2 Seiten und berechnete einen möglichen Fehler ein sodas er veranlasst hat nach einer bestimmten Strecke eine Seite im Zick Zack weiter bauen zu lassen. Alles was er benutzt hat um dies zu realisieren waren rechte Winkel um Richtungswechsel darzustellen. Der Mensch ist das Maß aller Dinger Vitruv ließ die Maßverhältnisse eines idealen Menschen in seine Baukunst einfließen. Leonardo da Vinci griff Vitruvs Angaben auf und setzte sie zu den Idealformen von Kreis und Quadrat in Beziehung. Maßeinheiten Vor 130 Jahren wurden alle Maße vom Menschen abgeleitet was demnach zu vielen unterschiedlichen Maßen führte (1870 ca 600 verschiedene Flächenmaße). Da gab es die Daumenbreite, Elle (Abstand von Ellenbogen und Mittelfingerspitze), Fingerbreite, Fuß/Schuh, Handbreite, Klafter ( Länge zwischen den Mittelfingerspitzen und dem waagerecht ausgestreckten Arm), Meile ( 1000 Doppelschritte bei den Römern ca 1479m), Rute, Schritt, Spanne und Zoll. Das Ur – Meter 1867 stellten die Franzosen das Ur – Meter. (das Ur- Meter sollte der zehnmillionste Teil des über die Pole gemessenen Erdmerianquadranten sein). Höhenbestimmung (Anhang4 im Ordner1) Es gibt fünf verschiedene Arten die Höhe zu bestimmen. 1) geometrisches Nivellement : Höhenunterschiede werden mit Hilfe einer horizontalen Ziellinie unmittelbar bestimmt.Genauigkeit ca 10mm auf 1 km 2) trigonometrisches Nivellement: Höhenunterschiede werden mittels der Zenitwinkel (Vertikalwinkel) und der Entfernung zum Zielpunkt berechnet. Genauigkeit ca 2-3cm. 3) barometrisches Nivellement: Höhenunterschiede werden aus den Differenzen aus des gemessenen Luftdrucks bestimmt. 4) photogrammetrisches Nivellement: Durch zwei von unterschiedlichen Standpunkten hergestellten Einzelbildern wird mit Auswertgeräten ein räumliches Modell hergestellt. Durch Vergleichshöhen kann bei stereoskopischer (räumlicher) Betrachtung auf andere Höhen geschlossen werden. Genauigkeit liegt im dm und bei aufwendiger Technik im cm Bereich. 5) Satellitengestützes Nivellement : Genauigkeit ca 2-3cm Gesetze der geometrischen Optik (Anhang5 im Ordner1) Reflexionsgetz: Der Einfallswinkel ist gleich dem Reflexionswinkel. Brechungsgesetz: (Von Snellius 1581 – 1626). Beim Übergang aus einem optisch dünneren in einen optisch dichteren Stoff werden Lichtstrahlen zum Einfallslot hin gebrochen (und umgekehrt). Totalreflexion: Wenn der Winel vom Lichtstrahl zum Einfallslot mehr als 46,5gon beträgt, dann entsteht eine Totalreflexion. Koordinatensysteme (Anhang6 im Ordner1) Alle Punkte gleicher Länge heißen Meridiane Alle Punkte gleicher Breite heißen Breitenkreise Soldner – Koordinaten Nullpunkt ist ein ausgezeichneter Punkt I. Ordnung, Abzissenachse ist der durch diesen Punkt laufende Meridian. Die Ordinate des Punktes P ist das ellipsoidische Lot von P auf die Abzissenachse und die Abzisse von P ist der Meridianbogen vom Koordinatenanfangspunkt bis zum Ordinatenfußpunkt. Mit zunehmender Entfernung der Ordinaten vom Hauptmeridian konvergieren (zusammenlaufen) diese. Gauß – Krüger – Koordinaten Carl – Friedrich – Gauß hat ein Konformes (Winkeltreue) Abbildung der Erdoberfläche unter günstigen Verzerrungsverhältnissen in die Kartenebene aufgestell. Johann Krüger griff diese Arbeit 92 Jahre später auf und entwickelte sie neu, daher wird diese Abbildung meistens Gauß – Krüger – Abbildung genannt. Der Nullpunkt jedes Systems liegt am Äquator, Abzissenachse der einzelnen Systeme ist jeder durch drei teilbare Meridian ausgehend vom Null – Meridian in Greenwich. Die Ordinaten stehen senkrecht auf dem Mittelmeridian.Um negative Werte zu vermeiden wurde dieser Wert um 500 000 erhöht. Nach einem Beschluss der Arbeitsgemeinschaft der Vermessungsverwaltung ist nach beiden Seiten des Mittelmeridians jedes Systems eine Ausdehnung von 1° 40’ (100km) vorgesehen. Das heißt das sich zwei benachbarte Systeme um 20’ (ca 23 km) überlappen. Höhenbezugsflächen im Wandel der Zeit (Anhang7 im Ordner1) Das derzeit gültge Höhenbezugssystem in Deutschland heißt DHHN 92, früher war dies in der Bundesrepublik Deutschland NN Normalnull (Berliner Sternenwarte) und in der DDR HN Höhennull (Kronstädter Pegel). Die beiden damaligen Höhenbezugsflächen HN und NN wiesen einen Unterschied zwischen 12cm und 16cm auf, an der Grenze von Berlin galt HNhöhe + 15cm = NNhöhe. Die beiden Systeme NN und NHN haben einen Höhenunterschied von 0.018m wobei die NHN Höhen immer den geringeren Zahlenwert aufweisen. 1897 wurde in Deutschland eine einheitliche Nullmarke am Grundpfeiler einer Berliner Sternwarte (37.000m) bestimmt. 1913 musste diese Nullmarke verändert werden, sie befand sich im Müncheberger Stadtforst am Hoppegarten. Referenzsysteme, Referenzrahmen und das geodätische Datum(Anhang8 im Ordner1) Referenzsystem beschreibt die theoretische ideale Definition eines Koordinatensystems in einem Raum. Ein Referenzrahmen defeniert die Realisierung eines solchen Systems, in Form von Koordinaten fest installierten Beobachtungspunkten bzw. Stationen. Ein Referenzsystem kann mehrere Referenzrahmen aufweisen. Das geodätische Datum wird durch 8 Parameter definiert: die große und kleine Halbachse des Ellipsoids, drei Translationsparameter zur Festlegung des Koordinatenursprungs und drei Rotationsparameter zur Festlegung der Orientierung. Nicht geozentrische Referenzsysteme waren nur für einen Bereich (z.B. Kontinent) optimal angepasst. Terrestrische globale geozentrische Referenzsysteme sind mit dem Erdkörper rotierende Koordinatensysteme. Zwei bekannte Referenzsysteme sind das World Geodetic System 1984 (WGS 84) und der IERS Terrestrial Reference Frame (ITRT). Ältere Lagefestpunktfelder basieren auf einem nicht geozentrischen Koordinatensystem, aufgebaut in vier Stufen. TP I. Ordnung mit Seitenverhältnissen von 30 – 50 km TP II. Ordnung mit Seitenverhältnissen von 10 – 20 km TP III. Ordnung mit Seitenverhältnissen von 3 – 10 km TP IV. Ordnung mit Seitenverhältnissen von 1 – 3 km TP III. Und TP IV. wurden durch Polygonzüge verdichtet. Die Bezugsfläche des DHDN (deutsches Hauptdreiecksnet) ist das 1841 von Bessel aus 10. Gradmessungen berechnete Ellipsoid, Fundamentalpunkt ist der Punkt Rauenberg mit der angenommenen Lotabweichung Null. Hauptdreiecksseiten wurden in Abständen von 100 bis 200 km durch Basismessungen bestimmt. Eine Basis war ca. 5 – 8 km lang und wurde mit Invadrähten gemessen um eine Genauigkeit von 1 : 1 000 000 zu erreichen, durch Winkelmessungen wurde diese Basis auf die Hauptdreiecksseiten übertragen deren Genauigkeit auf 1 : 100 000 veranschlagt wurde. Anfang der 70er Jahre wurde angefange das Lagefestpunktfeld zu erneuern, neue Messverfahren wie die elektronische Distanzmessung kamen diesem nur entgegen. 1980 wurde in Niedersachsen ein Lagefestpunktfeld durch Trilateration und Polygonierung sehr wirtschaftlich erstellt. Heute wird dies durch Satellitenverfahren abgelöst (Größere Distanzen mit einer sehr guten Genauigkeit). Die Grundlage für ein Globales geozentrisches terrestrischer Referenzrahmen bildet ein Satellitenpositionierungssystem ( z.B. GPS), die Lasermessung zu künstlichen Erdsatelliten (SLR) und zum Mond (LLR) sowie very long baseline interferometrie (VLBI) oder eine Kombination all dieser Verfahren. Der globale Referenzrahmen WGS 89 beruht auf der Technik von Satellitenpositionierungssysteme. Durch Beobachtung von VLBI, GPS, SLR und LLR Stationen wird ein Internationales Terrestrischer Referenzrahmen (ITRF) jährlich neu berechnet. Die Genauigkeit von ITRF wird auf wenige Zentimeter angegeben. Im stabilen Teil von Europa soll eine 3D Genauigkeit von ±15 mm herschen. Für Europa gibt es den Referenzrahmen ETRF 89 der durch 35 europäische Statonen definiert wird. Der nationale Referenzrahmen für Deutschland heißt DREF, das Netzt besteht aus 109 Punkten die meisten davon sind TP I. Ordnung. In Berlin bildeten vier Koordinatensysteme eine Grundlage. Konformes System Müggelberg, Konformes System Berliner Rathausturm, 18. Soldnersystem Müggelberg und das 19. Soldnersystem Götzerberg (Spandau). 1970 wurde damit begonnen das Lagefestpunktfeld zu erneuern. Es wurde in zwei Hierarchiestufen eingeteilt, die übergeordneten Lagefestpunkte und die Aufnahmepunkte. Auch im neuen Lagefestpunktfeld dient der TP I. Ordnung Müggelberg als Nullpunkt, allerding wurde im neuen Lagefestpunktfeld der Nullpunkt fiktiv um 40 000m westlich und 10 000m südlich verschoben. Wenn das ETRS 89 eingeführt wird verliert der TP I. Ordnung Müggelberg seine Bedeutung. Unter Trilateration versteht man Streckenmessung von Dreiecksseiten. Quadratnetzkonstruktionen (Anhang9 im Ordner1) Man zieht zwei Diagonalen, vom Schnittpunkt aus trägt man mit einem Zirkel zu den Ecken gleiche Strecken ab. Nun hat man ein genaues Rechteck. Mann sollte möglichst zu allen Rändern einen Abstand von 4cm einhalten. Als nächstes zeichnet man 10cm * 10cm große Quadrate. Hilfsmittel: Koordinatograph, Gitterkreuz Konstruktions Lochplatte und die Diagonalmethode Bestimmung der Fernrohrvergrößerung (Anhang10 im Ordner1) Es gibt zwei Methoden die Fernrohrvergrößerung zu bestimmen 1)Bestimmen der Vergrößerung durch Vergleichen scheinbares Sehfeld / wahres Sehfeld 2)Bestimmung der Vergrößerung Objektivdurchmesser / Eintrittspupille Umrechnung vom neuen ins alte Koordinatensystem (Anhang11 im Ordner1) Y 31 100 +60 000 91 100 X 24 600 -10 000 14 600 Neues System Altes System Der Aufbau einer Gauß – Krüger – Koordinate Pkt. P1 Y (3) 529 471.13 Die geklammerte 3 bedeutet das, dass der 9° Meridian ist. Die weiteren zahlen sagen ob der Punkt östlich oder westlich des Mittelmeridians ist in diesem Fall östlich,weil wenn die Zahlenfolge kleiner als 500 000 ist liegt der Punkt westlich. X (5847) 221.92 Die geklammerte Zahl sagt einem wie viel km der Punkt über dem Äquator liegt. Baugrubensicherung (Anhang12 im Ordner1) Die Standfestigkeit der Seiten hängt von mehreren Faktoren ab: Bodenart, Witterungsverhältnisse, Erschütterung des Bodens (Verkehr, Baumaschinen), zusätzliche Belastungen durch Aufschüttung, Baumaterialien usw. Es gibt zwei Arten die Seiten zu sichern. 1)Abböschen: Steht genügend Platz zur Verfügung ist die Abböschung das einfachste und das billigste die Seiten zu sichern. 45° bei leichten Böden (Muttererde, Sand), 60° bei mittelschwerem Boden (Lehm, Ton), 80° bei schwerem Boden (Stein). 2)Verbauen: Wenn der nötige Platz nicht vorhanden ist werden Stahlspundwände in den Boden gerammt um die Seiten zu sichern. Klassifizierung von Theodoliten (Anhang13 im Ordner1) Theodolit niedriger Genauigkeit Messgenauigkeit: 2.1 – 5.0 mgon Einsatzgebiet: Einfache Messungen bei Bauarbeiten, Absteckungen und Kleinpunktvermessung. Horizontalkreis: 70 – 80 mm Vertikalkreis: 50 – 80 mm sofern vorhanden Fernrohrvergrößerung: 15 – 20 fache Vergrößerung Theodolit mittlerer Genauigkeit Messgenauigkeit: 0.51 – 2.0 mgon Einsatzgebiet: Polygonierung, Kleintriangulation, Absteckungen und Tachymetrische Messungen. Horizontalkreis: 70 – 90 mm Vertikalkreis: 50 – 80 mm Fernrohrvergrößerung: 20 – 25 fache Vergrößerung Mikroskopvergrößerung: 20 fache Mikroskopvergrößerung (Winkelablesung) Theodolit hoher Genauigkeit Messgenauigkeit: 0.26 – 0.5 mgon Einsatzgebiet: Präzisionspolygonierung, Präzisionstachymetrie, Ingenieurmessungen hoher Genauigkeit und Triangulation 2 und 3 Ordnung. Horizontalkreis: 80 – 100 mm Vertikalkreis: 70 – 90 mm Fernrohrvergrößerung: 30 fache Vergrößerung Theodolit höchster Genauigkeit Messgenauigkeit: < 0.1 mgon Einsatzgebiet: Triangulation 1 Ordnung, Tunnelabsteckung und der gleichen Horizontalkreis: 100 – 250 mm Vertikalkreis: 90 – 150 mm Fernrohrvergrößerung: 30 – 65 fache Vergrößerung Libellen am Theodolit Es gibt zwei Libellenarten an einem Theodolit, die Dosenlibelle und die Röhrenlibelle. Dosenlibelle: Die Dosenlibelle ist in ein Metall gefasstes zylindrisches Glasgefäß, der Deckel ist innen Kugelförmig ausgeschliffen, bis auf die Libellenblase ist die Dosenlibelle mit einer leichtbeweglichen Flüssigkeit wie Alkohol oder Äther gefüllt (meist Äther) und der Boden ist zugeschmolzen. Die Dosenlibelle hat in einem Theodolit den Zweck zur Grobhorizontierung einer Ebene, bzw. Vertikalstellen einer Achse. Sie hat im allgemeinen Angaben nicht unter 8’ und der Schliffradius ist nicht größer als 0.8m. Röhrenlibelle: Die Röhrenlibelle besteht aus einer innen tonnenförmig ausgeschliffenen zylindrischen Glasröhre, sie ist in einer Metallfassung spannungsfrei gelagert und wird mit einer leichtbeweglichen Flüssigkeit wie bei einer Dosenlibelle gefüllt, die Dämpfe bilden die Libellenblase. Die Röhrenlibelle hat den Zweck zur Feinhorizontierung, sie besitzt eine Genauigkeit von 20’’ – 30’’. Die Angaben (Empfindlichkeit) der Libellen hängt vom Schliffradius ab, je größer der Radius desto empfindlicher ist die Libelle und desto kleiner sind die Angaben. Horizontal- und Vertikalkreis Der Horizontal- und Vertikalkreis bestehen aus Glas oder bei einfachen Theodoliten aus Metall oder Kunststoff. Aufbau: Der Vertikalkreis ist fest mit dem Fernrohr verbunden und seine Ebene steht vertikal auf dem Horizontalkreis. Die Kippachse verläuft durch den Mittelpunkt des Vertikalkreises. Die Stehachse des Theodoliten verläuft durch den Mittelpunkt des Horizontalkreises. Die Teilung ist im Uhrzeigersinn in Gon oder Grad beziffert. Für die Teilkreise bestehen Digitale und Analoge Ableseeinrichtungen. Die Strichdicke auf dem Glasteilkreis beträgt 2 – 8 Mikrometer. Die Nullrichtung beim Vertikalkreis befindet sich in Richtung des Zenits, die Winkelgröße wird am festen Höhenindex abgelesen. Die Nullrichtung beim Horizontalkreis kann durch den Benutzer individuell eingestellt werden (bei analogen Teilkreisen sollte man diese Einstellungen nicht durchführen). Achsen am Theodolit Achsen: Vertikalachse (Stehachse) Libellenachse Zielachse(Kollimationsachse) Kippachse(Horizontalachse) VV LL ZZ KK Geometrische Beziehungen 1. 2. 3. 4. V (senkrecht auf) L K (senkrecht auf) V Z (senkrecht auf) K K (parallel zu) L Wichtigkeit der Achsen Meßfehler verhindern V (senkrecht auf) L ist falsch Justieren eines Nivellierinstruments anhand eines Kollimators (Anhang14 im Ordner1) Die Zielachse eines Kollimators wird mithilfe einer Libelle streng lotrecht gestellt. Das zu prüfende Nivellier stellt man direkt vor den Kollimator und das Strichkreuz wird auf unendlich eingestellt. Nun wird mit der Kippschraube das Strichkreuz des Prüflings mit dem Strichkreuz des Kollimators zur Deckung gebracht, danach justiert man die Dosenlibelle oder man spielt zuerst die Libelle ein und justiert mit Hilfe der Strichkreuzberichtigungsschrauben das Strichkreuz. Klassifizierung der Libellennivelliere Die Klassifizierung wird anhand der Abweichung für 1km Doppelnivellement angegeben. Nivelliere niederer Genauigkeit > 10mm/km, Nivelliere mittlerer Genauigkeit < 10mm/km, Nivelliere hoher Genauigkeit < 3mm/km, Nivelliere sehr hoher Genauigkeit < 1mm/km, Nivelliere höchster Genauigkeit < 0.5mm/km Nivelliere niederer und mittlerer Genauigkeit Diese werden auch als Baunivelliere bezeichnet, sie werden häufig auf Baustellen für Höhenmessungen, Flächenaufnahmen und kurzen Anschlußnivellements genommen. Die Instrumente haben ein festes Fernrohr oder ein mit einer Kippschraube einstellbares Fernrohr, Objektdurchmesser von 25 bis 30mm, 18 bis 25 fache Fernrohrvergrößerung und Libellen mit 30’’ bis 60’’ Angaben auf 2mm. Nivelliere hoher Genauigkeit Diese werden auch als Ingenieurnivelliere bezeichnet und dienen vornehmlich zur Ingenieurvermessung wie Gleis-, Brücken- und Tunnelabsteckungen sowie zur Festpunktnivellements. Die neueren Ingenieurnivelliere mit Libellenhorizontierung sind ausnahmslos mit Kippschrauben ausgestattet. Sie haben ein Objektdurchmesser von 30 bis 40mm, 25 bis 30 fache Fernrohrvergrößerung und Koinzidenzlibellen mit Angaben von 20’’ bis 30’’ auf 2mm. Manche Typen sind zur Verfeinerung der Ablesung mit einem aufsteckbarem Planplattenmikrometer ausgestattet. Nivelliere sehr hoher und höchster Genauigkeit Diese Geräte werden auch als Präzisions- oder Feinnivelliere bezeichnet. Typische Aufgaben für diese Instrumente sind Festpunktnivellements höchster Genauigkeit, Überwachungsnivellement von Brücken, Staumauern, Feinvermessung im Maschinenbau und Senkungsnivellement im Bergbau. Sie besitzen einen ähnlich konstruierten Unterbau wie Ingenieurnivellierem sie sind aber in allen Teilen etwas schwerer und größer. Weitere Kennzeichnen sind mindestens eine 40fache Fernrohrvergrößerung, Objektdurchmesser von etwa 50mm und Libellen mit 5’’ bis 10’’ Angaben. Ältere Feinnivelliere wurden auf das Nivellieren mit Libellenausschlägen eingerichtet. Neuere Feinnivelliere besitzen eine Koinzidenzlibelle, deren Angaben im Hinblick auf die hohen Einstellgenauigkeit beim koinzidieren etwa mit 10’’ bemessen wird. Ebenfalls besitzen sie einen Planplattenmikrometer, um die Ganuigkeit des Strichkreuzes zu erhöhen und unabhängig der Entfernung gut die Angaben ablesen zu können ist die hälfte des Horizontalfades durch zwei, einen flachen Keil bildenden, Striche ersetzt. Koinzidenzlibelle Koinzidieren heißt zusammenlaufen oder einander decken. Nivellierlatten Einfache Nivellierlatten sind 3 bis 5m lang und 6 bis 8cm breit. Um sie leichter zu transportieren werden Klapp- und Schiebelatten gefertigt. Es gibt Modelle die eine E – Teilung besitzen. Sie sind in cm – Felder eingeteilt und nach dm beziffert. Die Bezifferung steht nach 1 dm mal auf rechts und dann auf links. Die Farbe der Teilung ist nach 1 m abwechselnd rot oder schwarz, der Hintergrund ist weiß oder gelb und die Bezifferung ist schwarz. Dann gibt es noch Latten mit einem binären Muster, Latten deren Zahlen auf dem Kopf stehen für Nivelliergeräte die kein Bildumkehrendes Fernrohr besitzen und Latten mit einer doppelten Feldereinteilung(die weißen flächen erscheinen bei hellem Licht größer als die schwarze bzw rote Einteilung). Einfache Nivellierlatten besitzen zum senkrechtstellen eine justierbare Dosenlibelle mit einer Angabe von etwa 30’. Bei den Präzisions – Nivellierlatten für Nivelliere mit analoger Meßwertausgabe unterscheidet man zwei Teilungsarten: Die Strichteilung, Teilungseinheit 10mm Die E – Schachbretteilung, Teilungseinheit 5mm Es gibt Zweiskalenlatten die für Nivelliere hoher und höchster Genauigkeit mit optischen Mikrometer empfohlen werden. Diese Latten besitzen zwei Teilungen, von denen eine mit Null, die andere mit einem bestimmten Betrag, der Lattenkonstante, beginnt. Teilungsträger ist bei Präzisionsnivellierlatten ein temperaturunempfindliches Metallband (z.B. Invar). Außerdem gibt es noch Wendelatten die auf beiden Seiten eine Teilung besitzen. Präzisionsnivellierlatten besitzen auf der Rückseite eine justierbare Dosenlibelle mit einer Angabe von etwa 20’. Nivellierlatten und Empfänger für Rotationslaser Sind Rotationslaser im Einsatz, so verwendet man Nivellier – Latten, auf denen ein Empfänger (Detektor) verschoben werden kann. Mit dem Detektor wird der Laserhorizont aufgesucht und ein Ableseindex, der mit dem Detektor verbunden ist; dient zum Ablesen der Nivellierlatte. Ein akustisches Signal erleichtert das Aufsuchen des Lasers. Der Detektor kann auch unmittelbar genutzt werden, um Höhenmarken auf Mauern oder andere Einrichtungen zu übertragen. Bestimmung von Horizontalwinkeln (Anhang15 im Ordner1) Folgende Messungsanordnungen sind zu unterscheiden: 1 Einfache Winkelmessung 1a In einer Fernrohrlage 1b In beiden Fernrohrlagen mit Verstellen des Teilkreises 1c In beiden Fernrohrlagen ohne Verstellen des Teilkreises 2. Repetitionswinkelmessung Zu 1b Messung in zwei Halbsätzen Zu 1c Satzweise Winkelmessung Bemerkung (ein Halbsatz) (zwei Halbsätze) (ein voller Satz) Nach der ersten Lage wird der Teilkreis um ca. 1 – 4 Gon verstellt Bei der Richtungsmessung wird der Teilkreis nach dem ersten Satz um 200 / n verstellt. (n = Anzahl der Sätze) Tachymeter (Anhang16 im Ordner1) Elektronische Winkelbestimmung: Inkrementalverfahren Grundlage: Gläserner Teilkreis mit Inkrementen (Rasterstrichen) wird mit Foto und Leuchtdioden abgetastet. Relatives Verfahren: Bei Bewegung werden Lichtimpulse, die durch die Rasterstriche entestehen, gezählt. Ein Mikroprozessor zählt die Impulse und wertet diese als Richtungsänderung aus Quasi – Absolut Verfahren: Genau wie beim relativen Verfahren, nur wird hier noch ein Nullpunkt auf dem Teilkreis festgelegt um einen genauen Richtungswinkel zu bestimmen. Durch kippen und drehen wird der Nullpunkt abgetastet um ihn zu identifizieren. Ablesegenauigkeit Zur Steigerung nutzt man zwei diametral (gegenüberliegende) Diodenpaare Codeverfahren: (Anhang 17 im Ordner1) Beim Codeverfahren wird ein gläserner Teilkreis in mehrere Konzentrische Spuren eingeteilt. Diese bestehen aus unterschiedlich geschwärzten Segmenten. Auf der Oberseite sind für jedes Segment eine Leuchtdiode und auf der Unterseite eine Fotodiode oder ein CCD – Sensor angebracht. Immer wenn die Leuchtdiode ein Lichtdurchlässiges Segment durchleuchtet, sendet die gegenüberliegende Fotodiode / CCD – Sensor das Signal 1, an allen undurchlässigen Stellen sendet die Fotodiode / CCD – Sensor das Signal 0. Durch diese Signale entsteht eine Reihe von 1 un 0 z.B.: 100100, hinter diesem Code ist ein Winkel abgespeichert. Um die Genauigkeit der Winkelbestimmung zu erreichen, wird die Auflösung des Teilkreises mittels elektronischer Interpolation (Genauigkeitsverfahren) erhöht. Es ist ein absolutes Verfahren. (CCD – Sensor heißt Charge Coupled Device „Ladungsgekoppeltes Bauelement“) Messprogramme in Theodoliten (Anhang18 im Ordner1) Die im Instrument integrierte Software gestattet über das Grafikdisplay - das Anlegen, Öffnen und Löschen von Aufträgen, - die Eingabe von Maßstab, Höhenniveau, Temperatur und Druck, - originäre Daten, Koordinatenverzeichnisse und Codeverzeichnisse zu editieren - Daten per COM oder zur Karte zu übertragen, Daten in die Station zu übernehmen und - Benutzerdefinierte Vermessungsprogramme aufzurufen Grundsätzlich werden von den Instrumentenherstellern Basisprogramme für - freie Stationierung mit Anzeige der Restklaffen, - Tachymetrie inklusive der Messung zu unzugänglichen Punkten, - Absteckung, - Flächenberechnung direkt oder aus Koordinaten auszugeben mitgeliefert. Ergänzt werden können diese Programme durch zusätzliche Applikationen, die u.a. folgende funktionen aufweisen: - Neuberechnung von Koordinaten nach Datenkorrektur (z.B. Reflektorhöhe), - Grafische und numerische Positionsanzeige bei der Absteckung, - Berechnung von Polygonzügen mit Ausgleichung des gesamten Punktfeldes, - Bestimmung des Umfeldes von Objekten durch Kombination von elektronischer und Messbandmessung, - Scannen von Obeflächen, - Koordinatentransformation, - Erfassung von Punkten auf einer vertikalen Ebene, - Point to Line (Orthogonalaufmessung), - Bestimmung von Umringsmaßen, - Katasterlösungen mit voreingesellten Druckdateien entsprechend den Vorschriften der Vermessungsverwaltung. Absteckung eines Schnurgerüstes: Bei Gebäudeabsteckungen hat es sie bewährt, die Gebäudeseiten bis über die mutmaßliche Ausdehnung der Baugrube zu verlängern und dort ein Schnurgerüst zu erstellen, auf dem die genauen Verlängerungen mit Nägeln markiert werden. So können durch Einhängen von Schnüren oder Drähten die Gebäudeseiten während des Baus jederzeit wieder hergestellt werden. Messung vom unzugänglicher Punkte: 1. Senkrecht unter dem Punkt, dessen Höhe bestimmt werden soll, einen Reflektor aufstellen. Die Position des Tachymeters ist beliebig. 2. Die Distanz zum Reflektor messen. 3. Hochpunkt anzielen. 4. Auf Knopfdruck wird der Höhenunterschied H zwischen Bodenpunkt und Hochpunkt berechnet und angezeigt. Spannmaßberechnung: Das Programm berechnet Distanz und Höhenunterschied zwischen zwei Punkten. 1. Tachymeter beliebig aufstellen. 2. Zu beiden Punkten die Distanz messen. 3. Auf Knopfdruck werden Abstand und Höhenunterschied angezeigt. Geländeaufnahme (Polarverfahren) Messung der Umringsmaße eines Gebäudes: Durch Winkel und Distanzmessung wird die Lage und die Höhe von Objektpunkten erfasst, z.B. um einen Situationsplan zu erstellen. Dazu wird in einem lokalen Koordinatensystem das Instrument auf einen beliebigen markanten Punkt aufgestellt. Zur Orientierung wird ein weiterer markanter Punkt gewählt, nach dessen Anzielung der Horizontalkreis auf „Null“ gestellt wird. Liegt bereits ein Koordinatensystem vor, so ist das Instrument auf einen bekannten Punkt aufzustellen und der Horizontalkreis zu einem zweiten bekannten Punkt zu orientieren. Zwei Gebäudeecken werden mit dem Tachymeter elektronisch, alle weiteren Gebäudeecken mittels Messband gemessen. Die Gebäudeecken werden als rechtwinklig angenommen. Kanalmessstab: Dieses Programm erlaubt Messungen zu einem Punkt der nicht direkt sichtbar ist. Hilfsmittel ist ein spezieller Kanalmessstab der 2 oder 3 Prisma aufmontiert hat. Die Daten für den verdeckten Punkt werden aus den Messungen zu den Prismen, den Prismenabständen und der bekannten Länge des Stabes berechnet. Der Stab kann positioniert werden wie man will, egal was für ein Winkel, jedoch muss er während den Messungen unbewegt bleiben. Die „Messungen“ werden so berechnet, als ob die Stabspitze direkt angezielt worden wäre. Diese Messungen können in der aktiven Datei gespeichert werden. An dem Messstab können zwei oder drei Reflektoren angebracht sein. Die Daten des Messstabes werden in der Konfiguration des Programmes bestimmt. Es werden die Werte für die Stablänge, die Prismenabstände und die Additionskonstante der Prismen eingegeben. Wird ein Messtab mit drei Reflektoren verwendet, wird das Ergebnis aus allen möglichen Kombinationen der Messungen berechnet. Reflektor1 + Reflektor2 Reflektor3 + Reflektor2 Reflektor1 + Reflektor3 Die X,Y und Z Koordinatenwerte ergeben sich aus jeder Messkombination die dann gemittelt die XYZ Koordinaten des verdeckten Punktes ergeben. Eletronische Tachymeter (Anhang19 im Ordner1) Leistungsfähigkeit: - Alle Bedienelemente (z.B. Horizontal- und Vertikalkreis, Dosenlibelle, Höhen- und Seitenfeintrieb) des Theodoliten sind auch hier beim Tachymeter vorhanden. - Daten werden im Mikroprozessor verarbeitet. - Alle Meßdaten werden gespeichert. - Standardsoftware vorhanden, die Lösung vielfältiger geodätischer Probleme ermöglicht. - Kompensiert automatisch Instrumentenfehler (z.B. Aufstellfehler) und atmosphärische Korrekturen (Temperatur, Luftdruck). - Eine interaktive Totalstation aufzubauen ist möglich (dadurch, daß grafikfähiges Display und Tastaturen darauf schon abgestimmt sind) Eigenschaften: - Standardabweichung der Winkelmesung 0.2 – 2mgon - Standardabweichung der Distanzmessung ±(1mm + 2ppm) - ±(5mm + 5ppm) - Bei Verwendung mehrerer Prismen (z.B. 7 Prismen auf einer Scheibe angebracht) ist eine Reichweite der Distanzmessung bis zu 5000Meter möglich - Zweiachskompensator(Kompensator je für Steh- und Horizontalachse) zur Feinhorizonzierung vorhanden - Display mit numerischer (NUM) und / oder alphanumerischer (ALPHA) Eingabemöglichkeit vorhanden - Regestrierung der Daten auf einer PC – Card - Sowie Schnittstellen zum Datentransfer Die Leistungsfähigkeit kann durch zusätzliche Komponenten erhöht werden: - reflektorlose Distanzmessung. - Autofokus zur Scharfstellung im Fernrohr (das Fernrohr wird erst durch Grobvisierung zum Reflektor / Ziel ausgerichtet, dann wird die AF – Taste gedrückt und die Fokussierung erfolgt automatisch, manuelle Fokussierung bleibt aber erhalten) - Licht – Zielhilfe (SearchLight) zum anvisieren schlecht sichbarer Prismen - Laserlot anstelle eines optischen Lotes - Motorisierung der Totalstation (Servotachymeter) - Gerätehersteller bieten Software an mit der man Servotachymeter zur Ein – Mann Station aufrüsten kann (dafür wird eine Fernbedienung benötigt, die Daten werden vom Gerät zur Fernbedienung oder von der Fernbedienung zum Gerät übertragen) Positioniereinrichtung (Zieleinweishilfe): - farbiges Blinklicht am Fernrohr zeigt Sollrichtung an Zielsensor: - übernimmt automatische Zielerfassung, die Feinanzielung und gestattet Zielverfolgung - Fernrohr grob auf Prisma ausrichten - Ausgesendeter Laserstrahl wird vom Prisma zurückgeworfen - Instrument ermittel zentrale Abweichung - Über Steuerbefehle werden mittels Schritt und Stellmotoren Abweichungen korrigiert - Fadenkreuz wird zur Mitte hin ausgerichtet - Wenn Prisma im zentralen Drittel des Fernrohrgesichtsfeldes dann sofortige Erkennung - Wenn nicht dann spiralförmiges Absuchen des Fernrohrgesichtsfeldes Anlage eines Polygonzuges (Anhang20 im Ordner1) Polygonpunkte werden Dauerhaft durch Tonröhren, Eisenrohre oder Nägel gesichert. Bevor man einen Neupunkt festlegt muss man auf gute Sichtbedingungen, möglichst weite Strecken, keine spitzen Winkel und möglichst gestreckte Winkel geachtet werden. Eine Einmessskizze wird angefertigt um den Neupunkt bei späteren Vermessungsarbeiten wiederfinden zu können, auf eine Einmessskizze muss der Nordpfeil drauf sein, der Punkt muss auf nahe gelegende Objekte eingemessen werden (Messband) und die Skizze muss so groß sein das man anhand von Gebäude, Straßen die grobe Lage erkennen kann. Bei einer Polygonzugmessung sollte man in 2Halbsätzen besser in 2Vollsätzen messen, die Seiten werden doppelt gemessen (mm) und es muss eine Zwangszentrierung vorhanden sein. Zenitwinkelmessung (Anhang21 im Ordner1) Vertikalwinkel: Der Zenitwinkel z ist der Winkel zwischen dem Zenit und dem Zielpunkt (definiert durch die Zielachse des Fernrohrs). Der Zenit wird dabei durch die Lotrichtung des Standpunktes realisiert. Der Höhenwinkel α ist der Winkel zwischen der Horizontalen und dem Zielpunkt. Bei dem Nadirwinkel handelt es sich um den Winkel zwischen der Lotrichtung und dem Zielpunkt. Im Gegensatz zum Horizontalkreis, der bei Drehung des Theodoliten um die Stehachse fest bleibt, dreht der Vertikalkreis bei Drehung des Fernrohrs um die Kippachse mit, da der Vertikalkreis fest mit der Kippachse verbunden ist. Die Ablesevorrichtung des Vertikalkreises ist fest mit der Stütze verbunden und wird durch eine spezielle Libelle, die sog. Höhenindexlibelle, bzw. Durch einen speziellen Kompensator parallel zur Lotrichtung ausgerichtet. Bei den älteren Theodoliten muss die Höhenindexlibelle noch bei jeder einzelnen Zenitdistanzmessung manuell eingespielt werden. Hierzu dient eine Einstellschraube mit einer besonderen Riffelung. Bei neueren Theodoliten sorgt ein automatischer Kompensator für die Ausrichtung. Der Fehler des Kompensators bzw. Der Fehler der Libelle wird als Höhenindexfehler i bezeichnet. Es handelt sich hier also um einen Nullpunktsfehler, der alle Zielungen in gleicher Art und Weise beeinflusst, allerdings in beiden Fernrohrlagen mit unterschiedlichen Vorzeichnen. Er kann daher durch Messung in zwei Lagen eliminiert werden. Drei Teilkreisverfahren (Anhang22 im Ordner1) - Codeverfahren Inkrementalverfahren Dynamisches Verfahren Nach dem Einschalten des Instrumentes ist es beim Dynamischen Verfahren direkt einsatzbereit. Nachtrag Elektronische Winkelbestimmung Dynamische Verfahren: Beim dynamischen Verfahren werden alle Teilkreisstriche durch Rotation des Teilkreises zur Messung herangezogen. Während der Drehung wird die Kreisteilung an zwei diametral gelegenen Teilkreisstellen durch Lichtschranken abgetastet. Der Messwert entsteht aus der Differenz der Werte der zwei Abtaststellen. Der aus einer solchen Messung abgeleitete Winkelwert ist frei von Einflüssen aus Teilkreisfehlern. Werden noch die Nullrichtung für die Horizontal- und Vertikalrichtung mittels Lichtschrankenpaar fest definiert, kann auf eine Initialisierung der Teilkreise verzichtet werden. Freie Stationierung (Anhang23 im Ordner1) Freie Stationierung bedeutet Aufnahme oder Absteckung von einem frei wählbaren Standpunkt aus! Besonders eignet sich dazu ein registrierender elektronischer Tachymeter mit der Möglichkeit, die polaren Meßelemente sofort weiterzuverarbeiten. Dank der großen Reichweite und Genauigkeit der Instrumente erlaubt dieses Verfahren eine große Bewegungsfreiheit im Gelände. Man kann den Standpunkt in erster Linie nach topographischen Gesichtspunkten aussuchen, Hindernisse umgehen und kommt mit einem Minimum an Stationen aus. Genauigkeit der freien Stationierung: - Die Genauigkeit wächst mit der Anzahl der Festpunkte (3 – 4) - Die Genauigkeit eines Polarpunktes hängt von der Lage des Standpunktes nicht ab - Der Standpunkt wird umso genauer, je näher er beim Schwerpunkt der – als identische Punkte benutzten – Fespunkte liegt. Wissenswertes über sonstige Themen (rote Nummern) Anhang1 im Ordner1 Anhang2 im Ordner1 Anhang3 im Ordner1 Anhang4 im Ordner1 Anhang5 im Ordner1 Anhang6 im Ordner1 Anhang7 im Ordner1 Anhang8 im Ordner1 Anhang9 im Ordner1 - Aufgaben und Tätigkeitsmerkmale eines Vermessers Lehrsatz des Euklid Begriffsbestimmung (Vermessung) Einfluchten Steigung, Neigung, Gefälle Libellen Instrumente zum absetzen von rechten und gestrecktn Winkeln Linsen Verschiedene Fernrohre Anhang10 im Ordner1Anhang11 im Ordner1Anhang12 im Ordner1Anhang13 im Ordner1Anhang14 im Ordner1Anhang15 im Ordner1Anhang16 im Ordner1Anhang17 im Ordner1Anhang18 im Ordner1Anhang19 im Ordner1Anhang20 im Ordner1Anhang21 im Ordner1Anhang22 im Ordner1Anhang23 im Ordner1Anhang24 im Ordner1- Koordinaten, verschiebe Werte Kurzübersicht „Grundlagen zu Landesvermessung“ Orthogonalpunktberechnung altdeutsche Schrift Schnittberechnung Schnitt- Gerade/Kreis Richtungswinkel (2Seiten) Polares Anhängen Richtungswinkel und Polygonzug (2Seiten) Instrumenteninformationen Beispiel zur satzweisen Winkelmessung Prüfen und Berichtigen es Theodoliten Praxis der indirekten Höhenbestimmung Kippachsenfehler Geometrisches Nivellement Robert Gregat Vermessungstechnik Teil 1 = Ordner1 (4998 Wörter)