aufgabe 1 - Cal Poly
Werbung

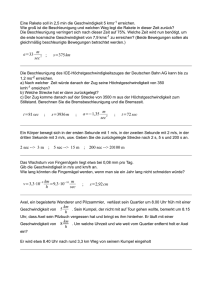
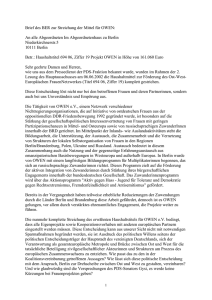
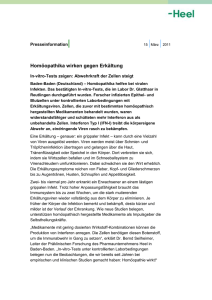
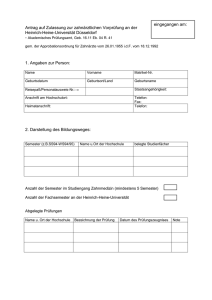
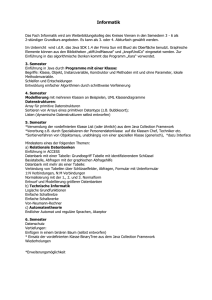
Technische Dynamik 1 – Owen/Heel – Winter Semester 2006/7 FH München, Fakultät 03, Fahrzeug- und Flugzeugtechnik Prüfung in Technische Dynamik I am 25. Januar 2007 F. Owen / P. Heel Bearbeitungszeit: 90 min, mit Unterlagen, 5 Aufgaben. Viel Erfolg!! Name: Semester: Punkte: Note: Bitte beachten Sie folgende Punkte: Bearbeiten Sie Ihre Prüfung auf zwei verschiedenen Arbeitsblättern. Verwenden Sie für die Aufgaben 1 und 2 einen anderen Papierbogen als für die Aufgaben 3, 4 und 5. Geben Sie Ihre Antworten in zwei Teile ab. Nummerieren Sie Ihre Antworten unbedingt deutlich und entsprechend dem Fragebogen (z.B. 1a, 1b, 1c… u.s.w.). Teil 1: AUFGABE 1 (20%) Für die Teilaufgaben a), b), c) und d) kreuzen Sie bitte alle möglichen Lösungen an. a) Die Überlagerung zweier harmonischer Schwingungen gleicher Frequenz ergibt unbedingt: x wieder eine harmonische Schwingung derselben Frequenz. □ eine nichtperiodische Schwingung. □ eine Schwingung, wobei die Amplitude die Summe der beiden einzelnen Amplituden ist. □ eine harmonische Schwingung mit der Amplitude = A A und derselben Frequenz. 2 1 2 2 b) Die Überlagerung zweier Schwingungen mit irrationaler Frequenzverhältnis ergibt: x eine nicht-periodische Schwingung. □ eine periodische Schwingung mit einer durchschnittlichen Frequenz. □ eine harmonische Schwingung mit einer durchschnittlichen Frequenz. □ eine harmonische Schwingung mit der Frequenz = + . 1 2 c) Ein Fahrzeug bewegt sich mit einer konstanten Geschwindigkeit VFRZ. Die Antriebsräder drehen wegen glatter Fahrbahn durch, die Rotationsgeschwindigkeit der Räder (Radius = r) sei für diese Betrachtung konstant. Die Geschwindigkeitsverteilung entlang der vertikalen Radachse soll in nachfolgender Skizze eingetragen werden. Zeichnen Sie die Geschwindigkeit der Hauptbewegung des Fahrzeugs in Skizze 1, die der reinen Drehungbewegung des Rads in Skizze 2 und schließlich die gesamte Geschwindigkeitsverteilung des Rads in Skizze 3 ein. 1) 2) + 3) = Seite 1 von 11 Technische Dynamik 1 – Owen/Heel – Winter Semester 2006/7 Die Bedingung für Schlupf lautet: □V □V xV FRZ > • r FRZ = • r FRZ < • r d) Ein Flugzeug fliegt vom Nordpol zum Äquator (von A über B nach C) mit einer konstanten Geschwindigkeit VFLZ. Definieren Sie die Coriolisbeschleunigung, die dabei auf das Fluggerät wirkt. (Die Atmosphäre dreht mit der Erde.) Drehrichtung der Erde: von oben betrachtet gegen den Uhrzeigersinn A Für den Punkt A (Nordpol): B acor = 2VFLZ Für den Punkt B (auf 45° Breitengrad): acor = 2V FLZ C Und für den Punkt C: acor = 0 In welcher Richtung wirkt die Coriolisbeschleunigung beim Durchfliegen von B? □ Es gibt keine Coriolisbeschleunigung am Punkt B x In Drehrichtung der Erde □ Entgegen der Drehrichtung der Erde □ In Flugrichtung □ Entgegen der Flugrichtung e) Man skizziere rechts das Phasendiagramm für die links dargestellte periodische Schwingung. Die markierten Zeitpunkte im Zeitbereich sind in der Phasenkurve ebenfalls einzutragen. Beschriften Sie die Achsen des rechten Diagramms. x x 2 8 1 6 9 7 8 1 3 7 t 5 4 6 9 5 4 Seite 2 von 11 3 2 x Technische Dynamik 1 – Owen/Heel – Winter Semester 2006/7 f) Von einem Schwingungsvorgang ist eine freie Ausschwingkurve x(t) gemessen worden. Ermitteln Sie folgende Kennwerte: logarithmisches Dekrement, Abklingkonstante und dimensionsloser Dämpfungsgrad. x(t), cm Meßergebnis 6 5 4 3 2 1 0 -1 0 -2 -3 -4 -5 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1 1.2 1.3 1.4 1.5 t, Sek. y (t ) 5 ln ln ln( 2) 0,693 2,5 y (t T ) 0,693 1,155 Sek 1 Abklingkonstante: T 0,6 Sek 2 Dimensionsloser Dämpfungsgrad: 0,110 2 1 2 Logarithmisches Dekrement: g) Ein System hat die folgende DGL: 2x x 18x u 18u Für welche überkritische Erregerfrequenz ergibt die Vergrößerungsfunktion genau den Wert 1? Das System ist Typ A/B wegen das u und u auf der rechten Seite. Für Typ A/B schneiden alle Kurven (eben, wie groß ist) V() = 1, wenn = 1,4 = 2 . Also = 2 . Im obrigen System, 0 18 3 Rad / Sek 2 , 0 0 2 3 Rad / Sek 4,24 Rad / Sek Seite 3 von 11 Technische Dynamik 1 – Owen/Heel – Winter Semester 2006/7 AUFGABE 2 (20%) Skizziert ist ein einfaches Modell zur Simulation der Schwenkbewegung eines Hubschrauberrotorblattes (Masse m, Pendellänge r, Hebellänge e, Dämpfungskonstante d, Federkonstante c). Die Drehgeschwindigkeit ist konstant, die Schwenkbewegung erfolgt in der horizontalen Ebene. Reibung und Schwerkraft spielen keine Rolle. Mit = 0 ist die Feder entspannt. a) Man schneide den Arm r samt Masse m frei und zeichnet das D’Alembert-Diagramm der Kräfte oder alternativ die Frei-Körper- und Masse-Beschleunigung-Diagramme des schwingenden Arms r. b) Man ermittle die Bewegungsgleichung für den Winkel . Für dieses Teil der Aufgabe, ist die Coriolisbeschleunigung zu vernachlässigen. c) Man wende die Vereinfachung an, dass sehr klein ist. Wie lautet die vereinfachte Bewegungsgleichung für den Fall, dass der Winkel sehr klein ist? d) Man ermittle die Eigenfrequenz für diesen Fall. Die folgenden kinematischen Beziehungen gelten: b e sin r sin a sin m r g e c d Hilfestellung: m a r O b e A Seite 4 von 11 Technische Dynamik 1 – Owen/Heel – Winter Semester 2006/7 Lösung: a) FKD = MBD ma t At An ma n r = r O Md , M c b) M A : ma n ma Cor M d M c mat r man b maCor cos r M c c M d d a n a 2 a r t d c mr 2 ma 2 b b e sin , a r sin sin ab er sin mr 2 d c m 2 er sin 0 c) A klein → mr 2 d c m 2 er 0 d) 0 c m 2 er mr 2 Seite 5 von 11 X Technische Dynamik 1 – Owen/Heel – Winter Semester 2006/7 FH München, Fakultät 03, Fahrzeug- und Flugzeugtechnik Prüfung in Technische Dynamik I am 25. Januar 2007 F. Owen / P. Heel Bearbeitungszeit: 90 min, mit Unterlagen, 5 Aufgaben. Viel Erfolg!! Name: Semester: Punkte: Note: Bitte beachten Sie folgende Punkte: Bearbeiten Sie Ihre Prüfung auf zwei verschiedenen Arbeitsblättern. Verwenden Sie für die Aufgaben 1 und 2 einen anderen Papierbogen als für die Aufgaben 3, 4 und 5. Geben Sie Ihre Antworten in zwei Teile ab. Nummerieren Sie Ihre Antworten unbedingt deutlich und entsprechend dem Fragebogen (z.B. 1a, 1b, 1c… u.s.w.). Teil 2: AUFGABE 3 (15%) X g y R x Die Scheibe links dreht gegen den Uhrzeigersinn mit der Drehgeschwindigkeit . Die Masse m kann sich reibungslos entlang der Führung bewegen. Bei entspannter Feder ( = 0) ist die Masse mit dem Abstand r von der Drehachse entfernt. m k r a) Ziehen Sie zunächst den stationären Fall in Betracht. Die Scheibe dreht mit einer konstanten Drehgeschwindigkeit, die Masse m rotiert ohne Schwingung entlang der Führungsschiene. Man schneide die Masse frei und zeichne die Kraft/Beschleunigungs-Diagramme oder alternativ das D’Alembert’sche Diagramm für diesen stationären Fall. b) Für den stationären Fall ermittelt man die Funktion (x, k, m, r). Anschließend untersuche man den dynamischen Fall. ist nicht konstant und die Masse bewege sich entlang der Führung. Beantworten Sie die Fragen in allgemeiner Form mit den in der Skizze angegebenen Variablen. c) Man zeichne die Kraft/Beschleunigungs-Diagramme oder alternativ das D’Alembert’sche Diagramm für den dynamischen Fall. d) Man beschreibe die x-Beschleunigungs-Gleichung, für diesen Fall. e) Wie lautet die Gleichung für die senkrecht auf die Führung gerichtete Kraft N? Seite 6 von 11 Technische Dynamik 1 – Owen/Heel – Winter Semester 2006/7 Lösung: a) FKD = MBD = Fk ma n y x b) Fx : Fk man Fk k ( x r ) a n x 2 k ( x r ) mx 2 k (x r) mx c) FKD = MBD ma t ma x = Fk ma n N ma Cor y x d) Fx : Fk man ma x a x x k ( x r ) m 2 x mx mx (k m 2 ) x kr e) Fy : N mat maCor at x aCor 2 x N m( x 2x ) Seite 7 von 11 Technische Dynamik 1 – Owen/Heel – Winter Semester 2006/7 AUFGABE 4 (20%) Ein System wird durch folgende Bewegungsgleichung beschrieben: mx dx c1 x 2 c 2 x 0 a) Man ermittle mittels des Störansatzes die Ruhelagen des Systems. b) Wie lauten die Gleichungen der gestörten Bewegungsgleichungen in der Nähe der Ruhelagen? c) Sind die gefundenen Ruhelagen stabile oder instabile Ruhelagen? Begrunden Sie Ihre Antwort. Lösung: a) x x0 x x x x x mx dx c1 x0 x c 2 x0 x 0 2 Statischer Fall : x, x , x 0 c1 x02 c 2 x0 0 x0 (c1 x0 c 2 ) 0 c2 c1 Diese sind die zwei Ruhelagen des Systems. x0 0, b1) c1) b2) x0 0 : mx dx c1 x 2 c 2 x 0 , aber x2 ≈ 0, weil x so klein ist. Also, x0 0 : mx dx c2 x 0 Erforderlich für Stabilität um diese Ruhelage: m, d, c2 > 0. 2 c c c x0 2 : mx dx c1 2 x c 2 2 x 0 c1 c1 c1 2 c2 c2 c c2 c x 22 2 2 x x 2 22 2 2 x c1 c1 c1 c1 c1 c 22 c c mx dx c1 2 2 2 x c 2 2 x 0 c1 c1 c1 mx dx 2c 2 x c 2 x 0 mx dx c 2 x 0 c2) Für Stabilität, m, d, -c2 > 0, also c2 < 0 für Stabilität um diese Ruhelage. Seite 8 von 11 Technische Dynamik 1 – Owen/Heel – Winter Semester 2006/7 AUFGABE 5 (25%) Für eine Vibrationsuntersuchung an einem Hubschrauberheckausleger wird an einem von vier Heckrotorblätter eine Zusatzmasse mz befestigt. Der Abstand zur Drehachse hat die Länge a. Zur Abschätzung der Steifigkeit des Heckauslegers wird eine Kraft Ftest in vertikaler Richtung aufgebracht (siehe Skizze) und die Auslenkung Xtest gemessen. Nach dem Test wird Ftest wieder auf 0 N gefahren. Die Strukturdämpfung (lehrsche Dämpfung) wird abgeschätzt. Die zu berücksichtigende schwingende Masse des Heckauslegers sei mH, die Masse des Rotors mR. Diese Parameter haben die folgenden Größen: Parameter mZ a Ftest Xtest mH mR Größe 0,5 0,02 1000 0,001 1% Einheit kg m N m – 30 25 kg kg a) Übertragen Sie zur Untersuchung des Systems den Heckauslegers in ein äquivalentes, vertikales Massen-Feder-Dämpfer-Schwingungssystem. Zeichnen Sie dieses System und beschriften Sie mZ, mR, mH, , d und k auf Ihrer Skizze. b) Berechnen Sie die Eigenfrequenz des äquivalenten Systems. c) Berechnen Sie die Auslenkung des Heckauslegers in vertikaler Richtung bei einer Heckrotordrehzahl von 2000 Umdrehungen pro Minute? d) Bei welcher Drehgeschwindigkeit ergibt sich die maximale Auslenkung in vertikaler Richtung? e) Wie groß ist dabei die maximale Auslenkung des Heckauslegers? Ftest = 1000 N Heckrotormasse, m R = 25 kg a X X Zusatzmasse, m Z = 0,5 kg Schwingende Heckauslegermasse, m H = 30 kg Seite 9 von 11 Technische Dynamik 1 – Owen/Heel – Winter Semester 2006/7 Lösung: a) mZ a t m H+ m R x d k b) 0 c) kg m k N 1E 6 134,2 rad / sec m H m R mZ m 55,5 kg N sec 2 X ( ) F k m ist die allgemeine Formel auf Seite K4/S8. In dieser ( d ) Formel ist F die Amplitude der Kraft und m die ganze schwingende Masse. Also 2000 2 2 2 rev min 2 rad 209 min 60 sec rev sec 209 F m Z a 0,5 kg (0,02 m) sek F 1000 N Ftest kX test , k test X test 0,001m 2 2 437 N 1E 6 N / m d 2m 0 sec2 N N 134,2 d 2m 0 2(55,5 kg ) 0 , 01 149 kg m m / sec sec 437N X (2000 rpm) 2 2 N sec 209 2 N sec 1 E 6 N / m 55 , 5 kg ( 209 rad / sec) 149 kg m m sec X (2000 rpm) 0,0003m 0,304 mm d) max 1 2 2 1 2(0,01) 2 0,9999 rad rad , 0 0,9999 (134,2) 134,2 0 sec sec Seite 10 von 11 2 Technische Dynamik 1 – Owen/Heel – Winter Semester 2006/7 e) Die Berechnung ist das Gleiche wie in Teil c) aber bei = 134,2 rad/sec und F: 2 134,2 F mZ a 0,5 kg (0,02 m) 180 N sec 2 180 N X (134,2 rad / sec) 2 2 N sec 134,2 2 N sec 1 E 6 N / m 55 , 5 kg ( 134 , 2 rad / sec) 149 kg m m sec X(134,2 rad/sec) = 9,0 mm Seite 11 von 11 2