Mehrdimensionale Gaußsche Normalverteilung und Brownsche
Werbung

Mehrdimensionale Gaußsche Normalverteilung und
Brownsche Molekularbewegung
Georg Messerle
Diplomarbeit
Hauptgutachter: Prof. Dr. Joachim Gwinner
Universität der Bundeswehr München
Fakultät für Luft- und Raumfahrttechnik
Institut für Mathematik und Rechneranwendungen
München, 18.05.06
I. Kurzzusammenfassung
I.
Kurzzusammenfassung
Die für den Studenten der Ingenieurwissenschaften überaus komplexe und
weitläufige Landschaft der Mathematik, mit Ihren mehr als dreitausend
Einzeldisziplinen (Basieux[3]), erfordert im Hinblick auf wichtige Teilgebiete
bedarfsgerechte
und
Zusammenfassungen
verständliche,
und
aber
Einführungen.
nicht
Gerade
das
unvollständige
bei
Studenten
gefürchtete Gebiet der Stochastik und der mathematischen Statistik,
erfordert daher eine genaue Hinführung und Einbettung in die Grundlagen
des
mathematischen
Denkens.
In
dieser
Arbeit
werden
vor
allem
Stochastische Prozesse, aber auch Grundlagen der Stochastik systematisch
und aufeinander aufbauend erarbeitet und immer im Hinblick auf ihre
Einbettung in die Strukturmathematik verständlich erklärt.
Schwerpunkte
sind
dabei
zunächst
auf
den
grundlegenden
Zusammenhängen und Strukturen gesetzt, sowie in späteren Kapiteln auf
der Annäherung eines Wiener-Prozesses mittels der Zufälligen Irrfahrt und
der Herleitung der gemeinsamen Verteilungsfunktion. Ihr Verhalten wird für
große Zufallsvektoren studiert.
Eine Hinführung zur Brownschen Molekularbewegung als die kohärente
Fortsetzung des Kalküls der Markov´schen Ketten und der Zufälligen Irrfahrt
in Verbindung mit multivariaten Gaußmaßen, bildet den zweiten Hauptteil.
Dabei wird gesondert auf mehrdimensionale Bewegungen und das Verhalten
der Kovarianzmatrix eines Wiener-Prozesses für differenzielle Zuwächse
eingegangen.
Diplomarbeit Stochastische Prozesse
V
Georg Messerle LRT 2002
Bezeichnungen
Bezeichnungen
∅,∈, ⊂, ⊃
⊂
⊂
mengentheoretische Symbole
⊂
⊂
Menge der natürlichen bzw. ganzen bzw. rationalen
bzw. reellen bzw. komplexen Zahlen
o.B.d.A.
ohne Beschränkung der Allgemeinheit
X(t,ω)
Realisation ω der ZV zur Zeit t; äquivalent hierzu
werden
auch
die
Notationen
Xt
und
X t (ω )
verwendet.
Abbildung; z.B.: ξ : Ω → Z , Abbildung ξ aus dem
→
Raum Ω in den Raum Z.
F,S…
Felder und σ-Felder
Restriktion von Abbildung f:A→B auf Menge A0 ⊂ A
f A0
B
Borel´sche σ-Algebra
D c ; Ω\D
Komplement von D
I
Einheitsmatrix
A×B
kartesisches Produkt der Mengen A und B
(t ∧ t )
entspricht: min {ti , t j }
X t1 ⊗ ... ⊗ X tn
die von den Ereignismengen erzeugte Produkt-σ-
i
j
Algebra
m
Mittelwert
E ( Xt X s )
bedingter Erwartungswert
Ansonsten werden nur Standardbezeichnungen und Standardschreibweisen
verwendet.
Diplomarbeit Stochastische Prozesse
VI
Georg Messerle LRT 2002
Abbildungsverzeichnis
Abbildungsverzeichnis
Abb. 24.1
Zustandsraum
24
Abb. 30.1
Übergangsgraph einer Markov´schen Kette
30
Abb. 31.1
Übergangswahrscheinlichkeit
31
Abb. 31.2
mehrstufige Übergangswahrscheinlichkeit
32
Abb. 44.1
Pfade eines zufälligen Läufers
44
Abb. 60.1
N(0,1)-Verteilung
60
Abb. 68.1
Entartung der bedingten Verteilung
61
Abb. 71.1
Verhalten der Verteilung für große t
71
Abb. 72.1
Entartung um den Nullpunkt
72
Abb. 76.1
Zwei unabhängige Wiener-Prozesse
76
Abb. 92.1
Stoppzeiten
92
Abb. 93.1
Zweidimensionaler Wiener-Prozess
93
Anmerkung:
Sowohl Abbildungen als auch Formeln sind nach Seitenzahlen nummeriert
um das Auffinden im Text zu erleichtern. Z.B.: Formel (23.2) bezeichnet die
zweite Formel auf Seite 23. Formeln werden nur nummeriert, wenn sich im
Text wieder darauf bezogen wird.
Diplomarbeit Stochastische Prozesse
VII
Georg Messerle LRT 2002
II. Inhaltsverzeichnis
II. II. Inhaltsverzeichnis
I.
Kurzzusammenfassung
V
Bezeichnungen
VI
Abbildungsverzeichnis
VII
1.
Motivation
5
2.
Aufgabenstellung
6
3.
Grundlagen
7
3.1.
Mengen, Felder und Filtrationen…………………………………. 7
3.1.1. Algebra und Topologie…………………………………………… 8
3.1.2. Das σ-Feld………………………………………………………….. 10
3.1.3. Borel´sche Menge und mengenerzeugtes σ-Feld…………...12
3.1.4. Filtrationen………………………………………………………… 14
3.2.
Der Wahrscheinlichkeitsraum…………………………………….. 15
3.2.1. Einführung………………………………………………………… 15
3.3.
Wahrscheinlichkeitsmaße………………………………………….. 18
3.3.1. Inhalte auf σ-Algebren…………………………………………… 18
3.3.2. Maßdefinierende Funktion und Verteilungsfunktion…….. 19
3.3.3. Einschub: Zufallsvariable………………………………………. 20
3.3.4. Dichtefunktion……………………………………………………. 21
3.3.5. Das Lebesgue-Maß……………………………………………….. 21
4.
Stochastische Prozesse (SP)
4.1.
23
Definition und Einführung…………………………………………. 23
4.1.1. Einschub: Zustandsräume…………………………………….. 24
4.2.
Kenngrößen stochastischer Prozesse……………………………. 25
4.2.1. Verteilungsfunktionen und
endlichdimensionale Verteilungen……………………………. 25
4.2.2. Die Trendfunktion…………………………………………………26
Diplomarbeit Stochastische Prozesse
1
Georg Messerle LRT 2002
II. Inhaltsverzeichnis
4.2.3. Die Kovarianzfunktion…………………………………………… 26
4.2.4. Die Korrelationsfunktion……………………………………….. 27
4.3.
Eigenschaften stochastischer Prozesse…………………………..27
4.3.1. Stationarität……………………………………………………….. 27
4.3.2. SP mit unabhängigen Zuwächsen……………………………. 28
4.3.3. Die Markov- Eigenschaft………………………………………...28
4.4.
Markov´sche Ketten………………………………………………….. 29
4.4.1. Markov´sche Ketten mit diskreter Zeit………………………. 30
4.4.2. Die Gleichung von Chapman-Kolmogoroff………………….. 34
4.4.3. Langzeitverhalten Markov´scher Systeme…………………... 35
4.4.4. Markov´sche Ketten mit stetiger Zeit, Markov-Prozess….. 36
5.
Die zufällige Irrfahrt
5.1.
38
Einfacher Random-Walk……………………………………………. 38
5.1.1. Einführung………………………………………………………… 38
5.1.2. Erwartungswert und Varianz………………………………….. 42
5.1.3. Die m-stufigen Übergangswahrscheinlichkeiten………….. 44
5.2.
Verhalten eines Random-Walk für große n…………………….. 46
5.2.1. Abschätzung der Aufenthaltswahrscheinlichkeiten
für n→∞….………………………………………………………….. 49
5.3. Stetiger Random-Walk als Approximation eines WienerProzesses…………………………………………………………………. 51
5.3.1. Fokker-Planck-Gleichung……………………………………… 54
5.3.2. Der differentielle Random-Walk als Vorstufe des WienerProzesses………………………………………………………….. 55
6.
Mehrdimensionale (Gaußsche Normal-)Verteilungen
6.1.
59
Definition und Einführung der Normalverteilung................. 59
6.1.1. Eigenschaften Gaußscher Verteilungen…………………….. 60
6.2.
Die Faltungsstabilität der Normalverteilung…………………… 61
6.3.
Die bedingte Verteilung und die Markov-Eigenschaft……….. 64
Diplomarbeit Stochastische Prozesse
2
Georg Messerle LRT 2002
II. Inhaltsverzeichnis
6.3.1. Die bedingte Verteilung der Brownschen Bewegung……...66
6.3.2. Die bedingte Varianz…………………………………………….. 69
6.4.
Multidimensionale Normalverteilung unabhängiger
Zufallsvariablen………………………………………………………. 69
6.4.1. Einschub: Dirac-Distribution………………………………….. 72
6.5.
Die Normalverteilung als Lösung der Diffusionsgleichung…. 73
6.5.1. Analytische Ableitung…………………………………………….73
7.
Brownsche Bewegung
7.1.
76
Definition und Eigenschaften……………………………………… 76
7.1.1. Physikalische Bedeutung………………………………………. 77
7.1.2. Definition…………………………………………………………… 78
7.2.
Die „Topologie“ der Brownschen Bewegung……………………. 78
7.2.1. Einschub: Das Produktsigmafeld…………………………….. 79
7.3.
Die Verteilungsfunktion der Brownschen Bewegung………… 82
7.3.1. Der Bezug zum zentralen Grenzwertsatz…………………… 82
7.3.2. Erwartungswert………………………………………………….. 83
7.3.3. Varianz……………………………………………………………...84
7.3.4. Die Inkremente des Wiener-Prozesses………………………. 86
7.4.
Darstellung als Markov- bzw. Gauß-Prozess…………………… 87
7.4.1. Einschub: stochastischer Kern………………………………...88
7.4.2. Die Markov-Eigenschaft………………………………………….91
7.4.3. Die starke Markov-Eigenschaft……………………………….. 91
7.4.3.1. Einschub: Stoppzeiten……………………………………. 91
7.5.
Mehrdimensionale Stochastische Prozesse…………………….. 93
7.5.1. Verallgemeinerung auf n Dimensionen…………………….. 93
7.5.2. Interpretation als Markov´sche Kette ………………………. 95
7.5.3. Brownsche Bewegung in mehreren Dimensionen……….. 96
7.5.3.1. Diffusionsgleichung für eine mehrdimensionale
Bewegung………………………………………………………………. 96
7.5.4. Beispiel: zweidimensionale Brownsche Bewegung………..97
Diplomarbeit Stochastische Prozesse
3
Georg Messerle LRT 2002
II. Inhaltsverzeichnis
7.6.
Stetigkeit der Trajektorien………………………………………….. 98
7.6.1. Stetigkeit im Quadratmittel……………………………………..98
7.6.2. Topologisches Analogon…………………………………………. 100
7.7.
Die Kovarianzmatrix…………………………………………………. 102
7.7.1. Die Kovarianzfunktion……………………………………………. 102
8. Zusammenfassung
107
9. Glossar
108
10. Literaturverzeichnis
113
Diplomarbeit Stochastische Prozesse
4
Georg Messerle LRT 2002
1.Motivation
1.
Motivation
Trotz der umfangreichen mathematischen Ausbildung im Ingenieursstudium
bleiben für die meisten Studenten viele grundlegende Zusammenhänge
unklar.
Vor
allem
die
Vorstellung
von
Räumen
und
Abbildungen,
insbesondere in der Linearen Algebra, stellt eine große Herausforderung für
den Studenten dar. Da dieses Kalkül auch Grundlage der Stochastik und
der mathematischen Statistik ist, soll diese Arbeit den Einstieg in die
komplexe Welt der Stochastischen Prozesse im Allgemeinen und der
Brownschen Bewegung im Speziellen, erleichtern. Dies geschieht durch die
behutsamen Einführung der Begriffe und systematisches, durch lebensnahe
Beispiele aus den Ingenieurwissenschaften unterlegtes Vorgehen.
Dabei soll das vielschichtige Gebiet der Stochastischen Prozesse, immer
unter Einbeziehung der Grundlagen, von Anfang an erläutert werden und
dem Leser an den wesentlichen Stellen sowohl Beweise vorgeführt, als auch
phänomenologische Annäherungen ermöglicht werden.
Im Vordergrund steht die methodische Aufbereitung des Stoffes durch einen
für den Studenten nachvollziehbaren und kohärenten Aufbau, der eine
Auseinandersetzung erleichtert und einen raschen Gesamtüberblick zulässt.
Unkompliziertheit
ohne
Unvollständigkeit
und
Ungenauigkeit
ist
der
Anspruch.
Durch eine Herleitung der Begriffe von den Grundlagen an und einer
gezielten Vertiefung an den kritischen Stellen, soll den Bedürfnissen des
Ingenieurs Rechnung getragen werden.
Diplomarbeit Stochastische Prozesse
5
Georg Messerle LRT 2002
2. Aufgabenstellung
2.
Aufgabenstellung
Beginnend bei den Fundamenten der Wahrscheinlichkeitstheorie wird
zunächst auf den Begriff des Wahrscheinlichkeitsraumes hingearbeitet.
Besonderes Gewicht wird, im Hinblick auf den Schwerpunkt „Gaußsche
Normalverteilung“, auf die Erklärung des Maßbegriffes sowie die Ableitung
der Verteilungsfunktion gelegt. Der Begriff des Stochastischen Prozesses
wird zunächst von seiner axiomatischen Definition her eingeführt und am
Beispiel der Markov´schen Ketten mit diskreter Zeit verdeutlicht. Näher
eingegangen wird neben den Markov´schen Ketten auf die zufällige Irrfahrt,
die bereits als Vorläufer einer Brownschen Bewegung interpretiert werden
kann.
Der
Schwerpunkt
liegt
hierbei
auf
der
Betrachtung
des
Langzeitverhaltens irrfahrender Teilchen und der Approximation des WienerProzesses.
Im
Kapitel
„Gaußsche
Normalverteilung“
wird
deren
Definition
und
Verallgemeinerung auf n-Dimensionen, sowie ihre physikalische Bedeutung
behandelt, sowie das Anfangsverhalten der gemeinsamen Verteilung eines nwertigen Zufallsvektors für Variationen des Parameters t, sei er diskret oder
kontinuierlich, studiert.
Den Hauptteil bildet die Einführung des Wiener-Prozesses. Dabei wird noch
einmal besonders auf die Markov-Eigenschaft eingegangen und die Stetigkeit
der
Trajektorien
nachgewiesen.
Unter
Ausnutzung
der
zuvor
nachgewiesenen Unabhängigkeit der Inkremente wird die Brownsche
Bewegung auch formal den Markov-Prozessen zugeordnet. Darüber hinaus
wird
die
Vorstellung
auf
mehrere
Dimensionen
erweitert
und
die
Kovarianzmatrix für eine 3-dimensionale Brownsche Bewegung berechnet.
Diplomarbeit Stochastische Prozesse
6
Georg Messerle LRT 2002
4. Stochastische Prozesse
3.
Grundlagen
3.1. Mengen, Felder und Filtrationen
Nach der Definition des Begründers der Mengenlehre, Georg Cantor, ist eine
Menge „eine Zusammenfassung von bestimmten, wohlunterscheidbaren
Objekten unserer Anschauung oder unseres Denkens zu einem Ganzen“
(Basieux[14]).
Gemäß
dieser
Definition
lassen
sich
alle
Objekte
kategorisieren, zusammenfassen und als Menge betrachten. Alles ist eine
Menge, und die Vorstellung von den Mengen und ihren Beziehungen
untereinander bilden den Grundstein der Mathematik.
Besonders wichtig sind die Beziehungen, die zwischen den Mengen bestehen
und die ihnen Strukturen aufprägen. Es existieren drei Grundstrukturen:
1. Strukturierung durch Relationen, also Abbildungen aus der Menge X
in die Menge Y vermittels einer Beziehung z.B.: x<y, x=y, a ist schöner
als b, usw.
2. Die algebraische Struktur, M × M → M , also Abbildungen aus dem
kartesischen Produkt [A1] der Menge in die Menge selbst, umgesetzt
durch Verknüpfung zweier Elemente zu einem Dritten: a+b=c, a-c=b.
3. Die topologische Struktur, einfach ausgedrückt, die Strukturierung
einer Menge M durch Auszeichnung von Teilmengen.
Da gerade diese dritte Struktur auch den Grundstein der Stochastik bildet,
und
darüber
hinaus
Wahrscheinlichkeitstheorie
zusammen
zugrunde
liegt,
mit
der
werden
Algebra
die
Begriffe
aller
hier
eingeführt, um ein grundlegendes Verständnis zu ermöglichen.
Diplomarbeit Stochastische Prozesse
7
Georg Messerle LRT 2002
4. Stochastische Prozesse
3.1.1. Algebra und Topologie
a)
Topologie
Definition:
T ⊆ P ( M ) nennt man eine Topologie T auf der Menge M wenn gilt:
1)
∅ ∈T ; M ∈T
2)
A1 , A2 ∈ T → A1 ∩ A2 ∈ T
3)
Ai ∈ T , i ∈ I →
∪
i∈I
Durchschnittsstabilität
A i ∈ T Vereinigungsstabilität
(M,T) d.h. die Menge M, strukturiert durch die Topologie T, heißt
topologischer Raum (TR). Die Elemente
Bi ∈ M heißen die Punkte des
topologischen Raumes. Die Elemente Ai der Topologie T heißen offene
Mengen.
Es
sei
(M,T)
ein
topologischer
Raum
und
A⊂ M ,
dann
heißt
A
abgeschlossen, wenn M\A offen ist, also nach Definition gilt: M\A ∈ T (auch:
Komplementstabilität) (Jänich[8],Plachky[6]).
Beispiele topologischer Räume:
1) M sei eine Menge. Dann ist ihre Potenzmenge eine Topologie auf M. Sie
heißt diskrete Topologie, weil jede einelementige Menge offen ist. Sie ist
die feinste Topologie, weil die Potenzmenge die Menge aller Mengen
und somit auch die Obermenge aller Topologien auf M ist. In einer
diskreten Topologie ist jede offene Menge abgeschlossen.
2) M sei wiederum eine Menge. Dann ist T = {∅, M } die gröbste Topologie
auf M. Sie heißt triviale Topologie auf M. Da das Komplement von M
die Nullmenge ist und umgekehrt, sind auch hier wieder alle Elemente
sowohl offen als auch abgeschlossen.
3) Definition und Beispiel: Ein topologischer Raum heißt HaussdorffRaum (oder separierbar), wenn zu jedem x1 , x2 ∈ M , x1 ≠ x2 disjunkte
Diplomarbeit Stochastische Prozesse
8
Georg Messerle LRT 2002
4. Stochastische Prozesse
Umgebungen U1 ,U 2 ∈ T mit x1 ∈ U1 , x2 ∈ U 2 und U1 ∩ U 2 = ∅ existieren.
Diese
Forderung
(→Kap.7.6.2.)(vgl.
ist
die
Nachweis
Grundlage
auf
des
Stetigkeit
Konvergenzbegriffes
mit
dem
--Beweis
(Merziger/Wirth[37], Jänich[17], Basieux[121]) ).
Definition:
Eine Abbildung f:X→Y heißt stetige Abbildung, wenn das Urbild jeder
offenen Menge wieder offen ist, d.h.:
für ein A ∈ Y und A offen in der Topologie T(Y)von Y, gilt f −1 ( A) ∈ X , wobei
f −1 ( A) offen in der Topologie T(X) der Menge X sein muss. (→ Kap. 7.6.2.)
Die Morphismen der Topologien, d.h. deren strukturerhaltende Abbildungen
heißen demnach auch stetige Abbildungen.
b)
Algebra
Unter einer algebraischen Struktur versteht man die Strukturierung einer
Menge durch Verknüpfungen. Genauer gesagt, ist eine Verknüpfung eine
Funktion ξ : M × M → M , also eine Abbildung aus dem kartesischen Produkt
der Trägermenge M in die Menge M selbst.
Dabei werden immer zwei Elemente aus M × M mittels einer Verknüpfung zu
einem dritten Element verbunden, welches wiederum Teil der Menge M ist.
Zu den Verknüpfungen zählen u.a. die Grundrechenoperationen (+, ×,…).
Deshalb wird der Umgang mit diesen Operationen in der Schule auch
schlicht Algebra genannt. Natürlich können nicht nur einzelne Zahlen (also
Elemente des
1
) miteinander verknüpft werden, sondern es kann sich bei
den Elementen auch um Teilmengen einer Menge Ω , oder Mengen im
Allgemeinen handeln (Basieux[39]).
Diplomarbeit Stochastische Prozesse
9
Georg Messerle LRT 2002
4. Stochastische Prozesse
3.1.2. Das σ-Feld
Da es nicht möglich ist, einem einzelnen Punkt ω aus einer Menge Ω eine
Wahrscheinlichkeit zuzuordnen, ist man gezwungen mit Teilmengen der
Potenzmenge eines Raumes Ω zu arbeiten [A2]. Diese speziellen Teilmengen
sind die Felder und σ-Felder.
Man benötigt zur systematischen Behandlung der Wahrscheinlichkeit eine
Klasse von Teilmengen, welche alle in Frage kommenden Intervalle (also die
interessierenden
Ereignisse)
enthält
und
auch
nach
Bildung
von
abzählbaren Vereinigungen und Durchschnitten derselben abgeschlossen
bleibt. Abgeschlossen bedeutet in diesem Zusammenhang, dass alle
Mengenoperationen,
die
mit
den
Teilmengen
innerhalb
der
Klasse
vorgenommen werden, wieder in die Klasse der Teilmengen zurückführen.
Beispiel (Abgeschlossenheit):
{ x} = ∩ ( x −
Wir betrachten:
n
1
, x]
n
Jeder Punkt x auf der reellen Achse ist demnach als abzählbarer
1
Durchschnitt der Intervalle ( x − , x] darstellbar. Wenn eine Klasse alle
n
Punkte enthält und bei der Bildung beliebiger Vereinigungen abgeschlossen
ist, enthält sie alle Teilmengen von Ω.
(Anmerkung: Im speziellen Fall der später auftretenden σ-Felder, gilt die
Abgeschlossenheit nur eingeschränkt: die Klasse der Teilmengen enthält bei
Bildung beliebiger Vereinigungen nicht alle Elemente von Ω, sondern nur die
sog. „beobachtbaren Ereignisse“.)
Definition:
Eine Auszeichnung von Teilmengen eines Raumes Ω heißt
Feld, wenn folgende Forderungen erfüllt sind:
Ω∈F
A∈ F
Ac ∈ F
Diplomarbeit Stochastische Prozesse
d.h. F ist komplementstabil
10
Georg Messerle LRT 2002
4. Stochastische Prozesse
A, B ∈ F
A ∪ B∈ F
d.h. F ist vereinigungsstabil
Da Ω c = ∅ → ∅ ∈ F
Nach dem Gesetz von DeMorgan gilt außerdem:
A ∩ B = ( Ac ∪ B c )c daraus folgt:
A, B ∈ F
→
A∩ B∈ F
d.h. F ist durchschnittsstabil
Dies sind jedoch auch die Bedingungen für die Auszeichnung eines
topologischen
Raumes.
Dennoch
ist
ein
Feld
im
Sinne
der
Wahrscheinlichkeitstheorie nicht einfach eine Topologie auf Ω (siehe [A3]). Es
handelt sich viel mehr um ein „topologieähnliches“ Gebilde, welches zwar
die Bedingung der Abgeschlossenheit erfüllt, aber nicht alle Elemente der
Trägermenge Ω enthält. In der Literatur wir oft auch der Begriff Algebra als
Synonym für Feld verwendet. Diese Bezeichnung ergibt sich aus der
Forderung
nach
Abgeschlossenheit,
d.h.
dass
man
bei
speziellen
Operationen (z.B. Durchschnittsbildung) in der Klasse F (mit Elementen A(i))
als Resultat immer wieder auf eine Teilmenge Ai ∈ F stößt. Insofern kann
man den Begriff Algebra analog verwenden, da gilt:
ξ :F × F → F
Ein Feld ist eine algebraisierte Topologie auf Ω, eine sog. multiple Struktur.
Ein σ-Feld entsteht, wenn das Feld zusätzlich bei Bildung von abzählbar
unendlichen Vereinigungen abgeschlossen ist:
A1 , A2 ... ∈ F
→
∞
∪A ∈F
i
und nach DeMorgan:
i =1
A1 , A2 ... ∈ F
→
∞
∩A ∈F
i
i=1
Wozu
diese
Eigenschaften
in
der
Praxis
dienen
wird
im
Kapitel
„Wahrscheinlichkeitsraum“ erläutert.
Beachte:
Nicht jedes Feld ist automatisch auch ein σ-Feld.
Diplomarbeit Stochastische Prozesse
11
Georg Messerle LRT 2002
4. Stochastische Prozesse
Größtes σ-Feld auf Ω ist die Potenzmenge mit 2Ω Elementen, vgl.
diskrete Topologie.
Kleinstes σ-Feld ist demnach die triviale Topologie mit der
Nullmenge und der Menge selbst als den Elementen.
3.1.3. Borel´sche Menge und mengenerzeugtes σ-Feld
Wichtig für das Verständnis der Wahrscheinlichkeitstheorie anhand der
Literatur, ist der immer wieder auftretende Begriff der Borel´schen Menge
[A3]. In diesem Zusammenhang stößt man zunächst auf eine Klasse von
Feldern, die wiederum als „Produkte“ bestimmter Klassen von Teilmengen
einer Trägermenge Ω zutage treten. Bei der Untersuchung von Klassen
befinden wir uns sozusagen im „2.Stockwerk“ des Gedankengebäudes der
Mengen: Im Erdgeschoss sind die Punkte oder Atome von Ω, im ersten Stock
die Teilmengen Ai.
Klassen sind an sich nichts weiter als Zusammenfassungen von Teilmengen,
die durch ihre speziellen Eigenschaften wiederum den Grundstein für eine
größere Klasse legen.
a) Mengenerzeugtes σ-Feld
Definition:
A sei eine Klasse von Teilmengen Ai einer Trägermenge Ω. Dann heißt σ(A)
das von A erzeugte σ-Feld, wenn gilt:
(i)
A ⊂ σ(A)
(ii)
σ(A) ist ein σ-Feld
(iii)
σ(A) ist „so klein wie möglich“ , dazu später mehr.
Diplomarbeit Stochastische Prozesse
12
Georg Messerle LRT 2002
4. Stochastische Prozesse
Wie kann nun eine Klasse A ein σ-Feld erzeugen? Man kann sich vorstellen,
dass auf einer Trägermenge Ω mehrere verschiedene Auszeichnungen von
Teilmengen (Klassen) vorgenommen werden können, die den Bedingungen
des σ-Feldes genügen, also selbst σ-Felder sind. Darüber hinaus ergibt ein
völlig beliebiger Durchschnitt von
σ-Feldern wiederum ein σ-Feld [A4].
Interessiert man sich beispielsweise bei einem Experiment E welche darin
besteht, n-mal zu Würfeln, für dessen zufällige Ausgänge, so betrachtet man
stets die Teilmenge A1 × ... × An von Ω1 × ... × Ω n . Die Produkte A1 × ... × An mit Ai ∈ A i
erzeugen nun aber gerade die Produkt-σ-Algebra A i ⊗ ... ⊗ A n . Existiert nun
als Durchschnitt verschiedener σ-Felder ein σ-Feld, welches die Klasse A
beinhaltet also A ⊆ σ ( A ) , so heißt σ(A) das von A erzeugte σ-Feld. Das
bedeutet, dass die Klasse A in allen erzeugenden Klassen enthalten sein
muss, also in gewisser Weise einen „Grundbaustein“ darstellt (sie ist eine
toplogische Subbasis des erzeugten Feldes) (Jänich[15]). Das erzeugte Feld
σ(A) ist so klein wie möglich wenn gilt: A ⊂ G und G ist ein σ-Feld, dann ist G
eines der σ-Felder deren Durchschnitt σ(A) erzeugt, so dass σ(A)wiederum in
G enthalten ist (siehe auch [A3]). Eine Trägermenge Ω, versehen mit einer
(Borel´schen) σ-Algebra heißt auch Messraum.
b) Borel´sche Mengen
Es sei I die Klasse der Teilintervalle (siehe unten) von (0,1] . Diese Klasse
erzeugt ihrerseits ein σ-Feld B = σ ( I ) . Die Elemente dieses σ-Feldes heißen
Borel´sche Mengen.
Es handelt sich dabei um einen bestimmten Bereich der Potenzmenge des
Einheitsintervalls und zwar um alle Teilintervalle
I = {(a, b]: a, b ∈ ; a < b}
Diplomarbeit Stochastische Prozesse
13
Georg Messerle LRT 2002
4. Stochastische Prozesse
Die Festlegung nur Intervalle zuzulassen, deren rechte Grenze größer als die
linke ist, garantiert, dass beim Herausgreifen eines beliebigen Intervalls die
Differenz b-a stets positiv ist. Auf diese Weise bildet die Borel´sche σ-Algebra
ein „Scharnier“ zwischen Topologie und Maßtheorie und ermöglicht den
axiomatischen Zugang zur Wahrscheinlichkeitstheorie (Kap. 3.2.2.).
Der
Zustandsraum eines Stochastischen Prozesses (Kap. 4.1.) muss dieses
Kriterium erfüllen.
3.1.4. Filtrationen
Mit dem Fortschreiten der Zeit vermehrt sich unser Wissen. Wir ändern
unsere Sichtweise auf die Vergangenheit, streichen vormals gedachte
Möglichkeiten aus unserem Gedächtnis und lassen neue zu. Kurz: wir
wissen immer besser Bescheid, was passiert ist und was alles passieren
kann (Brzezniak/Zastawniak[46], Karatzas/Shreve[3]).
Dieser Wissenszuwachs kann mathematisch durch eine Filtration modelliert
werden.
Definition:
Eine
Folge
von
σ-Feldern
F1 , F2 , F3 .... auf
Ω
mit
der
Eigenschaft
F1 ⊂ F2 ⊂ F3 .... ⊂ F wird eine Filtration genannt.
Fn bezeichnet den Stand des Wissens zum Zeitpunkt n. Er beinhaltet alle
Ereignisse A(n). Zum Zeitpunkt n ist also die Aussage möglich, ob sich ein
Ereignis A(k) mit k ≤ n ereignet hat oder nicht. Mit fortschreiten der Zeit wird
es eine Zunahme von Ereignissen A(k) geben, das heißt, die Familie Fn ,
welche unser Wissen repräsentiert, wird größer. Wir können also immer
besser beurteilen, ob sich eine beliebiges Ereignis bis dahin ereignet hat oder
nicht.
Praktische Bedeutung haben die Filtrationen bei der Realisation von
Zufallsvariablen (Kap. 7.4.3.1. Stoppzeiten). Dabei werden Teilmengen aus
Diplomarbeit Stochastische Prozesse
14
Georg Messerle LRT 2002
4. Stochastische Prozesse
dem
σ-Feld
des
Wahrscheinlichkeitsraumes,
der
Ereignismenge,
herausgegriffen, sprich realisiert. Die Zufallsvariable greift dabei immer ins
„neueste“ σ-Feld, welches alle vorhergehenden enthält (Kap. 7.2.)
3.2. Der Wahrscheinlichkeitsraum
3.2.1. Einführung
Jede endliche Folge von Versuchen V1 , V2 , V3 ...Vn führt ein Ergebnis E1 , E2 , E3 ...En
herbei. Dabei bedeutet E j ( k ) : Zustand E j , vom Versuch Vk herbeigeführt.
Das heißt, der Ablauf der Versuche (später auch des Prozesses) wird durch
eine Aussagenfolge E j1 (1), E j2 (2), E j3 (3)....E jn ( n) beschrieben. Es sind nun drei
Fälle denkbar, in denen Beziehungen zwischen den Aussagen hergestellt
werden können (Basieux[150], Bauer[1 ff]).
1.
Wenn j1... jn sind bekannt sind, dann ist auch jn +1 bekannt. Daraus
folgt, dass bei Vorliegen von E j1 (1) , das Ergebnis
E jn (n)
bereits
vollständig determiniert ist. Solche Angelegenheiten sind dann nicht
Sache der Stochastik.
2.
Obwohl die j1... jn bekannt sind, ist das Ergebnis völlig unbestimmt d.h.
aus der Kenntnis der ersten m Versuche fließt keine Information über
die Resultate der späteren Versuche. Chaos.
3.
Das Resultat der ersten m Versuche liefert eine gewisse Information
über den Versuch V(m+1), welche die möglichen Versuchsergebnisse
verschieden oder gleich stark vermuten lässt. Bsp.: Ziehen aus einer
Urne.
Der erste Fall beschreibt völlig deterministische Ereignisse, die i.A. mit Hilfe
von Differentialgleichungen beschrieben werden können. Im zweiten Fall ist
ausgehend von einem Versuch n keine Aussage über den Versuch n+1
möglich. Die Ereignisse verlaufen nach nicht greifbaren Gesetzen. Drittens
stellt den häufigsten und wichtigsten Fall dar und weist gleichzeitig auf
Diplomarbeit Stochastische Prozesse
15
Georg Messerle LRT 2002
4. Stochastische Prozesse
einen weit verbreiteten Begriff hin: die bedingte Wahrscheinlichkeit (Kap.
6.3.), oder genauer gesagt, die Wahrscheinlichkeit, dass B eintritt, wenn
zuvor A eingetreten ist. Wir werden in späteren Kapiteln Folgen von
Zufallsereignissen betrachten und die Beziehungen, die zwischen den
einzelnen Realisationen bestehen, genau untersuchen.
Losgelöst von den Vorstellungen, die die reale Welt uns intuitiv vorgibt, kann
der Begriff der Wahrscheinlichkeit auch in mengentheoretischer Fassung
konkretisiert werden. Aufbauend auf der Vorstellung der Topologien und
ihren Morphismen, lässt sich der Begriff des Wahrscheinlichkeitsraumes
definieren. Dies tat zuerst Andrej Kolmogoroff, mit seiner hier angegebenen
axiomatischen Definition der Wahrscheinlichkeit aus dem Jahre 1933:
Definition:
Ein Tripel (Ω,F,P) heißt Wahrscheinlichkeitsraum, wenn die folgenden
Bedingungen erfüllt sind:
1.
Ω ist eine Menge
2.
F ⊆ P ( Ω ) . F ist eine Menge von ausgezeichneten Teilmengen von Ω,
also eine Teilmenge der Potenzmenge.
F ist ein σ-Feld und heißt auch Ereignisfeld.
3.
P: F →[0,1]; P ist eine reelle Funktion von F ins abgeschlossene
Einheitsintervall [0,1]. P besitzt folgende Eigenschaften:
a)
P (∅) = 0
P (Ω) = 1
b)
Für jede endliche oder abzählbar unendliche Familie
( A1 )i∈I
von
Elementen aus F , wobei die Elemente ( A1 )i∈I paarweise disjunkt
sind, gilt
P
(∪
i∈I
)
Ai = ∑ i∈I P ( Ai ) .
Ausgehend von dem Würfelversuch, lassen sich diese Axiome sehr
anschaulich interpretieren:
Diplomarbeit Stochastische Prozesse
16
Georg Messerle LRT 2002
4. Stochastische Prozesse
1. Ω ist die Menge aller elementaren, möglichen Ereignisse.
2. Als Auszeichnung einer Teilmenge der Potenzmenge von {1,2,3,4,5,6},
F ⊆ P ( Ω ) , wird für den einmaligen Würfelversuch die Menge Ω selbst
mit ihren Elementen betrachtet. F ist die Menge aller beobachtbaren
Ereignisse des Wahrscheinlichkeitsraumes. Wenn ein Würfelversuch
bevorsteht, dann ist folgendes Ereignisfeld sinnvoll: Ω bestehe aus
sechs
Ereignissen
Ei =
„es
wird
eine
Zahl
gewürfelt“,
also
Ω = { Ei i = 1, 2,3, 4,5, 6} , und F sei die enge aller Teilmengen von Ω. Dabei
muss zum Beispiel das Ereignis A = { E1 , E3 , E4 } gedeutet werden als: „Es
wird 1 oder 3 oder 4 gewürfelt“. Allgemeiner bedeutet A ∈ F: eines der
Elementarereignisse aus A tritt ein. Das Ereignis Ω\A ist das Ereignis
„nicht A“; und offensichtlich tritt ja auch für jedes A immer eines
Ereignisse A oder Ω\A ein. Das Ereignis Ω ist absolut sicher, das
Ereignis ∅ dagegen unmöglich. Die Eigenschaften eines Ereignisfeldes
sind damit recht plausibel.
3. P ist eine Abbildung (Morphismus, stetige Abbildung) aus dem
Ereignisfeld des W-Raumes in das Einheitsintervall. Die Bedingung
P (∅) = 0
P ( Ω ) = 1 , enthält eine willkürliche Normierungsforderung,
die aber mit der intuitiven Vorstellung gut übereinstimmt. Das sichere
Ereignis „eine natürliche Zahl wird gewürfelt“, wird eben bei jedem
Versuch
eintreten;
das
unmögliche
Ereignis
„keine
Zahl
wird
gewürfelt“ ist, wenn wir die Möglichkeit ausschließen, dass der Würfel
auf einer Kante stehen bleibt usw., naturgemäß ausgeschlossen.
Axiom 3b) ist das wichtigste Axiom des Tripels, da es effektive
Methoden zur Berechnung der Wahrscheinlichkeiten ermöglicht. Es ist
auch die Voraussetzung, dass es sich bei der Abbildung P um einen
Morphismus handelt. Charakteristisch ist, dass nicht nur einzelne,
sondern
betrachtet
auch
zusammengesetzte
werden
können
Diplomarbeit Stochastische Prozesse
und
17
Ereignisse
auf
diese
(Familien
Weise
( A1 )i∈I )
beliebige
Georg Messerle LRT 2002
4. Stochastische Prozesse
Ereigniskombinationen
prognostiziert
werden
können.
Das
Raumkalkül ist schlicht ein zweckmäßiges mathematisches Konstrukt,
zur Modellierung eines komplexen Lebenssachverhaltes.
3.3. Wahrscheinlichkeitsmaße
Wie im vorstehenden Kapitel erläutert, vermittelt die Funktion P eine
Abbildung
einer
Ereignisfamilie
aus
der
Trägermenge
Ω,
auf
das
Einheitsintervall [0,1]. Grundproblem ist, eine Vorschrift zu finden, die den
Ereignisfamilien
und
Einzelereignissen
die
vom
Lebenssachverhalt
vorgegebene Wahrscheinlichkeit zuordnen kann.
Definition:
Eine Mengenfunktion ist eine reellwertige Funktion, definiert auf einer
Klasse von Teilmengen von Ω. Eine Mengenfunktion P auf einem Feld F heißt
Wahrscheinlichkeitsmaß, wenn folgende Bedingungen erfüllt sind:
1.
0≤P(A)≤1,
2.
P (∅) = 0
3.
Wenn A1,A2…An eine paarweise disjunkte Folge von F-Mengen ist und
wenn
A ist Element von F
P ( Ω ) = 1 , normiert
∞
∪A
k
∈ F ist, dann gilt:
k =1
P
(∪
i∈I
)
Ai = ∑ i∈I P ( Ai )
Mathematisch exakter ausgedrückt, gilt folgendes:
3.3.1. Inhalte auf σ-Algebren
Definition:
Es sei F eine Algebra über Ω. Dann heißt die Abbildung µ:F→
Diplomarbeit Stochastische Prozesse
18
mit
Georg Messerle LRT 2002
4. Stochastische Prozesse
µ( ∅ )=0 und µ(A)≥0, A ∈ F (Nicht-Negativität) und
µ(A+B)=µ(A)+µ(B), A∩B= ∅ (Additivität),
Inhalt auf F.
Der Inhalt µ heißt weiterhin σ-additiv, wenn µ
(∑
∞
n =1
)
An = ∑ n =1 µ ( An ) ,
∞
Weitere Eigenschaften von Inhalten (Plachky[14]):
Ein Inhalt µ auf einer Algebra F über Ω heißt
a) endlich, wenn µ(Ω)<∞ gilt,
b) σ-endlich, wenn alle An ∈F, n=1,2,3,…, paarweise disjunkt sind und
∑
∞
n =1
An = Ω sowie µ( An )<∞ gelten.
Ein σ-additiver Inhalt µ auf einer σ-Algebra F über Ω heißt Maß. Gilt
zusätzlich µ(Ω)=1, so heißt µ Wahrscheinlichkeitsmaß.
3.3.2. Maßdefinierende Funktion und Verteilungsfunktion
Definition:
Ist µ ein Maß auf F (F1 Borel) mit der Eigenschaft µ((a,b])<∞ für a,b ∈
und
a<b so heißt eine Funktion mit den Eigenschaften
F(x):=µ(0,x]), x>0 und
F(x):=-µ((x,0]), x<0 , jedoch gilt stets F>0, sowie
F(0):=0,
maßdefinierende Funktion.
Wenn F zusätzlich monoton wachsend (die Monotonie folgt unmittelbar aus
der Nicht-Negativität der endlichen Inhalte über einer borel´schen Algebra)
und rechtsseitig stetig ist und darüber hinaus gilt:
F(-∞)= lim F ( x ) = 0 und F(∞)=1, dann heißt die maßdefinierende Funktion F
x →−∞
eindimensionale Verteilungsfunktion.
Diplomarbeit Stochastische Prozesse
19
Georg Messerle LRT 2002
4. Stochastische Prozesse
Also: Inhalt → Maß → Wahrscheinlichkeitsmaß + maßdefinierende Funktion
→ Verteilungsfunktion.
Ausgehend vom Inhalt wird unter Heranziehung von Axiomen der Begriff der
Verteilungsfunktion entwickelt.
Bevor der Begriff näher erläutert wird,
zunächst ein Einschub über Zufallsvariable (ZV) und ihren Zusammenhang
mit den Wahrscheinlichkeitsmaßen.
3.3.3. Einschub: Zufallsvariable
Meistens lässt sich der Ausgang eines Experiments durch eine reellwertige
Größe X beschreiben. Zum Beispiel:
- Werfen eines Würfels
X = Augenzahl Ω={1,2,3,4,5,6}
- Werfen einer Münze
X=0,wenn Kopf; X=1 wenn Zahl; Ω={0,1}
- Abgaskontrolle bei Pkw
X = Konzentration von NO, o.ä.
Festzuhalten ist, dass das Ergebnis eines wissenschaftlichen Experiments
meistens Werte in den reellen Zahlen annimmt (Marti[10]). Man kann die
Zufallsvariable daher auch als eine Abbildung X:Ω→R auffassen, die durch
Realisation eine Abbildung aus der Trägermenge Ω in eine Teilmenge der
reellen Zahlen vermittelt. Diese Teilmenge ist wiederum Element der
Trägermenge Ω und heißt auch Zustandsraum Z.
Jede ZV zieht ein Wahrscheinlichkeitsmaß µ nach sich, welches auf dem σFeld (der σ-Algebra über Ω) der Borel´schen Mengen von Ω definiert ist und
seinerseits
eine
Abbildung
µ:R→R+,
vom
Zustandsraum
Z
ins
abgeschlossene Einheitsintervall vermittelt.
Die Verteilung einer ZV X ist also das Wahrscheinlichkeitsmaß µ, definiert
auf allen Teilmengen A von F, ausgedrückt durch die Funktion F(x)=µ(0,x].
Die Verteilungsfunktion F ordnet praktisch die Wahrscheinlichkeiten zu. Es
gilt: µ(A)=P(X ∈ A). Strenger:
F(x)=µ((0,x])=P{X≤x}
Bemerkung:
Diplomarbeit Stochastische Prozesse
20
Georg Messerle LRT 2002
4. Stochastische Prozesse
Die σ-Additivität des Wahrscheinlichkeitsmaßes impliziert für F eine
Treppenfunktion wenn die Ereignismenge diskret ist.
3.3.4. Dichtefunktion
Definition:
Eine Funktion f:R→R heißt Dichtefunktion der Zufallsvariablen X wenn gilt:
P { X ∈ B} = ∫ f X ( x )dx
B
Weitere Eigenschaften der Dichtefunktion:
F ( x ) = µ ( (o, x]) = P { X ≤ x} = ∫ f X ( x )dx
Es gilt:
B
d
F ( x) = f ( x) .
dx
und
Bemerkung:
Nach dem Lebesgueschen Ableitungssatz, ist jede auf einem Intervall der
Zahlengeraden
differenzierbar.
definierte,
In
fast
Differentialquotient F´(x).
monotone,
allen
reelle
Punkten
Funktion
existiert
λ1 − fast
daher
der
überall
reelle
Nach dem Satz von Radon-Nikodym bezeichnet
man f ( x ) auch als Radon-Nikodymsche-Derivierte (Bauer [179]).
3.3.5. Das Lebesgue-Maß
Definition:
Es sei F die Borelsche-σ-Algebra mit I = {(a, b]: a, b ∈ ; a < b} auf (0,1].
Die Zuordnung λ(I) = I = b-a heißt Lebesgue-Maß, wenn gilt:
1.
∅ ∈ I , Intervall mit Länge 0, d.h. λ ( 0 ) = 0
2.
A = ∪ i =1 I n , I n paarweise disjunkt
3.
λ ( A) = ∑ λ ( I n ) = ∑ I n
n
n
n
i =1
i =1
und
(2., 3. Axiome!)
Diplomarbeit Stochastische Prozesse
21
Georg Messerle LRT 2002
4. Stochastische Prozesse
Man erkennt, dass auf dem Einheitsintervall der Absolutbetrag einer
Teilmenge gleich ihrer („prozentualen“) Wahrscheinlichkeit ist und das
Lebesgue-Maß diese Zuordnung vornimmt (Plachky[19], Bauer[XIII]). Es ist
das einzige Maß welches jedem Intervall seine Länge als Wahrscheinlichkeit
zuordnet. Das Lebesgue-Maß ist aufgrund dessen translationsinvariant, d.h.
es kommt nur auf die Länge des Teilintervalls an, nicht jedoch auf seine
Lage im Einheitsintervall: λ(B+x)=λ(B). Diese Vorstellung liegt dem im Kapitel
„Eigenschaften
Stochastischer
Prozesse“
auftretenden
Begriff
der
Stationarität eines stochastischen Prozesses zugrunde (Billingsley).
Diplomarbeit Stochastische Prozesse
22
Georg Messerle LRT 2002
4. Stochastische Prozesse
4. Stochastische Prozesse
4.1.Einführung und Definition
Wie in Kap. 3.2. erläutert, handelt es sich bei der ZV X um das Ergebnis
eines Versuches unter bestimmten, vorgegebenen Bedingungen. Ändern sich
diese, so wird sich auch das Ergebnis des Experiments verändern. Manche
Ereignisse werden wahrscheinlicher, andere verlieren an Bedeutung. Um die
Veränderung der Bedingungen (z.B. bei Langzeitexperimenten) mit zu
berücksichtigen, betrachtet man Zufallsgrößen X=X(t), die von einem
deterministischen Parameter t abhängen. Dies führt zu allgemeineren
Zufallsexperimenten, als den bisher betrachteten. Was gemeint ist, soll
zunächst anhand eines Beispiels verdeutlicht werden:
Beispiel:
Messen der Temperatur über Jahreszeitraum.
Es wird täglich am selben Ort zur selben Zeit einmal die Temperatur
gemessen. Die Messergebnisse schwanken natürlich zufällig, sind aber
logischerweise auch von der Jahreszeit t abhängig. Es ist klar, dass es sich
bei Temperaturmessungen im Laufe eines Jahres um Werte verschieden
verteilter Zufallsvariablen handelt. Die am Tag i gemessene Temperatur
bezeichnet man daher mit X(i). Bei kurzen Zeiträumen (z.B. ein Tag) kann
jedoch davon ausgegangen werden, dass die ZV identisch verteilt sind.
Werden die Temperaturen nicht nur an diskreten Zeitpunkten (Tagen),
sondern mittels eines Sensors kontinuierlich das ganze Jahr über gemessen,
so führt dies zu einer ZV, die von einem reellen Parameter t abhängt. Auf
diese Weise erhält man für jedes Jahr den Temperaturverlauf als eine stetige
Funktion der Zeit x=x(t). Dabei ist x als Wert der Zufallsvariablen X zu
verstehen. Wird der Einfluss langfristiger Veränderungen des Weltklimas
vernachlässigt, sind die Verläufe rein zufallsbedingt.
Diplomarbeit Stochastische Prozesse
23
Georg Messerle LRT 2002
4. Stochastische Prozesse
Man könnte also eine Klasse Zufallsexperimente definieren, die „Messen der
Temperatur über ein Jahr“ heißt und alle Familien (zufälligen Vektoren)
{ X(t), 0≤t≤T } betrachten. Als Ergebnisse erhielte man dann auch nicht mehr
einzelne Realisationen x der ZV X, sondern reelle Funktionen, so genannte
zufällige Funktionen. Anstelle dieser Bezeichnung verwendet man auch den
Ausdruck
stochastischer
Prozess
oder
zufälliger
Prozess
(Beichelt/Montgomery[110]).
Weitere
Beispiele
stochastischer
Prozesse
sind
zum
Beispiel
die
Kursschwankungen an der Börse, der Pfad eines tropischen Wirbelsturmes
(Freund/Pöschel[89]) oder der Gang eines Schwerbetrunkenen („DrunkardsWalk“, Srinivasan/Mehata[56]).
Definition (1):
Unter
einem
stochastischen
Prozess
mit
Parameterraum
T
und
Zustandsraum Z (siehe Zustandsraum) versteht man eine Familie von
Zufallsvariablen {X(t), t ∈ T}, wobei Z die Menge aller Zustände (Werte)
bezeichnet, die die X(t) für alle t annehmen können (Borodin/Salminen[1]).
Der Parameter t wird im Allgemeinen mit der Zeit identifiziert, kann aber
praktisch beliebige physikalische Bedeutung haben. In den meisten Fällen
handelt es sich bei der Menge T={ t:t ∈ N } um die Menge der natürlichen
Zahlen, die Zeit nimmt also diskrete Werte an. Die Menge T={ t: a≤t≤b, b>a,
a≥0 } kann aber auch ein beliebiges Intervall der reellen Zahlen sein d.h. in
diesem Fall ist die „Zeit“ stetig. Die Menge T kann physikalisch als
Beobachtungszeitraum aufgefasst werden, in der allgemeinen Theorie
stochastischer Prozesse, kann der Parameterraum T aber als beliebig
vorausgesetzt werden.
Definition (2):
Stochastische
Prozesse
X t : Ω → Z mit Z ⊆
n
sind
Familien
{X t : t ∈T}
von
Zufallsvariablen
, die über ein und demselben Wahrscheinlichkeitsraum
Diplomarbeit Stochastische Prozesse
24
Georg Messerle LRT 2002
4. Stochastische Prozesse
(Ω,F,P) definiert sind, wobei (Ω,F,P) ein beliebiger Wahrscheinlichkeitsraum
sein kann, der oft nicht näher spezifiziert wird. Die Indexmenge T kann eine
beliebige Menge sein. Der Bildraum Z der ZV X t kann ebenfalls eine
beliebige Menge sein, die lediglich mit einer σ-Algebra B(Z) von Teilmengen
von Z versehen ist, d.h. (Z, B(Z)) ist ein beliebiger Messraum, der so
genannte
Zustandsraum
des
stochastischen
Prozesses
(Schmidt[3],
Karatzas/Shreve[1]).
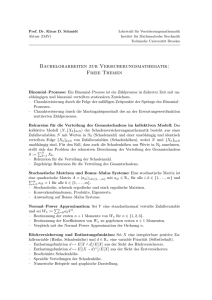
4.1.1. Einschub: Zustandsräume
Abb. 24.1
Es ist: X t : Ω → Z ⊆
W⊂
und Z ⊂ W ⊂
n
Zur Erklärung des Begriffs und zur Anbindung an das Kalkül des
Wahrscheinlichkeitsraumes lässt sich die ZV X auch als Abbildung
begreifen, die durch Realisation (also den Übergang von X→x) zum Zeitpunkt
t, aus der Menge der „möglichen“ Ereignisse, in die Menge der „tatsächlich
eingetretenen“ Ereignisse Z abbildet. Der Zustandsraum kann sowohl eine
diskrete Menge, d.h. mit abzählbaren Elementen, als auch ein Intervall sein.
In diesem Fall spricht man von einem stochastischen Prozess mit stetiger
Zeit. (Karlin[17])
Diplomarbeit Stochastische Prozesse
25
Georg Messerle LRT 2002
4. Stochastische Prozesse
D efinition:
Sei At die mögliche Realisation von X t für ein festes t. Dann wird die Menge
Z = ∪ At
t∈T
der Zustandsraum eines stochastischen Prozesses
{X t : t ∈T}
genannt. Es
handelt sich ebenfalls um einen Messraum, da ja die Produkte A1 × ... × An mit
Ai ∈ A i eine Produkt-σ-Algebra erzeugen, so dass gilt: A i ⊗ ... ⊗ A n = B ( Z )
(→Kap. 3.1.3.). (Brzezniak/Zastawniak[88], Srinivasan/Mehata[10])
4.2. Kenngrößen stochastischer Prozesse
4.2.1. Verteilungsfunktionen und endlich-dimensionale Verteilungen
Die Verteilungsfunktionen Ft ( x) = P( X t ≤ x) der X t sind bei reellwertigen
Zufallsvariablen, die wohl wichtigsten Funktionen in Verbindung mit einem
stochastischen Prozess. Sie geben Aufschluss über das Wesen des Prozesses.
Die
Gesamtheit
der
Verteilungsfunktionen
bestimmt
die
Wahrscheinlichkeitsverteilung des stochastischen Prozesses. Die vollständige
Charakterisierung eines SP erfordert daher für alle n=1,2,3,…und für alle nTupel {t1...tn } mit ti ∈ T die Angabe der gemeinsamen Verteilungsfunktion des
n-dimensionalen zufälligen Vektors { X (t1 ), X (t2 ),..., X (tn )} :
Ft1 ,t2 ,...tn ( x1 , x2 ,...xn ) = P { X (t1 ) ≤ x1 , X (t2 ) ≤ x2 ,..., X (tn ) ≤ xn }
D efinition:
Sei
{ X t , t > 0, t ∈T }
ein SP mit T=[0,∞) und Z=
Indizes wir die Mengenfunktion Pt1 ...tn : Β (
Diplomarbeit Stochastische Prozesse
26
n
. Für jedes n-Tupel t..t>0 von
) → [0,1] mit
Georg Messerle LRT 2002
4. Stochastische Prozesse
(
Pt1 ...tn ( B1 × ... × Bn ) = P xt1 ∈ B1 ,...xtn ∈ Bn
{Xt}
endlich-dimensionale Verteilung von
n-dimensionale
)
genannt. Es handelt sich um eine
Verteilungsfunktion,
auf
die
alle
Gesetze
von
beschreibt
den
mehrdimensionalen ZV zutreffen (Marti[56]).
4.2.2. Die Trendfunktion
Die
Trendfunktion
eines
stochastischen
Prozesses
Erwartungswert als Funktion der Zeit: m(t)=E(X(t)), d.h. sie beschreibt die
durchschnittliche Entwicklung.
+∞
Es gilt:
m(t ) =
∫ xf ( x)dx
t ∈T
t
wenn
f t (t ) =
−∞
dFt ( x)
dx
existiert.
4.2.3. Die Kovarianzfunktion
Die
Kovarianzfunktion
eines
Stochastischen
Kovarianz zwischen den Zufallsgrößen
Prozesses
X t und
Xs
beschreibt
die
als Funktion der
Zeitpunkte t und s.
Definition:
K ( s, t ) = Cov( X t , X s ) = E ([ X s − ms ][ X t − mt ]) = E ( X s X t ) − ms mt
Im Spezialfall s =t gilt: Var ( X t ) = K (t , t )
Die Funktion ist im Zusammenhang mit der Markov-Eigenschaft und dem
Grenzübergang s→t zweier aufeinander folgender ZV X s und X t , wichtig. Sie
beschreibt die Korrelation der ZV zweier unterschiedlicher Zeitpunkte als
Funktion Ihres Abstandes auf der Zeitachse. Da nach der MarkovEigenschaft (siehe Abschnitt 3.4.3.3.) nur unmittelbare Vorgängerzeitpunkte
maßgebend für die Realisation der ZV sind und nicht der Prozesspfad, wird
Diplomarbeit Stochastische Prozesse
27
Georg Messerle LRT 2002
4. Stochastische Prozesse
das Verhalten der Kovarianzfunktion beim Übergang s→t in den Kapiteln 4.6
und 5.4ff ausführlich behandelt.
4.2.4. Die Korrelationsfunktion
Wie in der elementaren Statistik kann auch bei den Stochastischen
Prozessen ein Maß der Abhängigkeiten zwischen zwei Zufallsvariablen
eingeführt
werden.
Die
Korrelationsfunktion
beschreibt
gleich
der
Kovarianzfunktion die Abhängigkeit zweier ZV als Funktion der Zeitpunkte s
und t. Sie ist eine bezogene Kovarianzfunktion.
Definition:
ρ ( s, t ) =
Cov ( X s , X t )
Var ( X s ) Var ( X t )
4.3. Eigenschaften stochastischer Prozesse
4.3.1. Stationarität
Man unterscheidet zwischen:
a) Stationarität im weiteren Sinn:
wenn m(t)=konst. und wenn auch die Varianz konstant ist: Var(X(t))=konst.
( Def. Var(X(t)), siehe 4.2.3)
b) Stationarität im engeren Sinn
Der stochastische Prozess { X t , t ∈ T } ist stationär im engeren Sinne, oder stark
stationär, wenn für alle n sowie für beliebige reelle h (mit ti + h ∈ T ), für alle nTupel {t1 , t2 ...tn } und alle { x1 , x2 ...xn } gilt:
Ft1 ,t2 ...tn ( x1 , x2 ...xn ) = Ft1 + h ,t2 + h ,...tn + h ( x1 , x2 ...xn )
Diplomarbeit Stochastische Prozesse
28
Georg Messerle LRT 2002
4. Stochastische Prozesse
d.h.
die
Verteilung
translationsinvariant
und
damit
gegenüber
das
Wahrscheinlichkeitsmaß
absoluten
Zeitverschiebungen.
sind
Die
Fluktuation der Trajektorien um die Trendfunktion wird keine signifikanten
Änderungen erfahren. Die Trendfunktion verläuft bei stationären Prozessen
parallel zur Zeitachse.
4.3.2. Stochastische Prozesse mit unabhängigen Zuwächsen
Der Zuwachs eines stochastischen Prozesses im Intervall [t1 , t2 ] wird definiert
als die zufällige Differenz X (t2 ) − X (t1 ) . Zuwächse können natürlich auch
negativ sein (→Kap. 7.3.4.).
a) homogene Zuwächse
{Xt , t ∈T}
hat homogene oder stationäre Zuwächse wenn X ( t2 − τ ) − X ( t1 − τ )
für alle τ mit t1 + τ ∈ T und t2 + τ ∈ T die gleiche Wahrscheinlichkeitsverteilung
haben. Anschaulich geht es hier um die „Schrittweite“ eines stochastischen
Prozesses, also um die Abstände zwischen den Werten der einzelnen
Realisierungen (bei diskreten Parametern), die wiederum durch eine
Zufallsvariable beschrieben werden können.
b) unabhängige Zuwächse
{Xt , t ∈T}
n-Tupel
hat unabhängige Zuwächse wenn gilt: für alle n=1,2,3,… und alle
{t1 , t2 ,..., tn } mit
t1 < t2 < ... < tn ,
ti ∈ T
sind
die
Zuwächse
X 2 − X 1 , X 3 − X 2 ,..., X n − X n −1 unabhängig von t. Das bedeutet, dass sich die
Zuwächse aus disjunkten Intervallen gegenseitig nicht beeinflussen.
4.3.3. Die Markov-Eigenschaft
Die Markov-Eigenschaft ist eine der wichtigsten Eigenschaften bei der
Beschreibung stochastischer Prozesse, da die SP unter anderem anhand
dieser Eigenschaft klassifiziert werden.
Diplomarbeit Stochastische Prozesse
29
Georg Messerle LRT 2002
4. Stochastische Prozesse
Definition:
{ X t , t ∈ T } hat
Tupel
die Markov-Eigenschaft, wenn für alle n=2,3,… und alle (n+1)-
{t1 , t2 ,..., tn+1} mit
t1 < t2 < ... < tn +1 , sowie für beliebige Ai ⊆ Z , i = 1, 2,..., n + 1
gilt:
(
) (
P X tn+1 ∈ An +1 X tn ∈ An , X tn−1 ∈ An −1 ,..., X t1 ∈ A1 = P X tn+1 ∈ An +1 X tn ∈ An
Wenn gilt Z =
)
, sind die An hierbei disjunkte Intervalle von Z.
Die Wahrscheinlichkeit, dass X tn+1 im Intervall An +1 realisieren wird, hängt nur
vom gegenwärtigen Zustand ab, nicht aber von vergangenen Zuständen. Für
die Wahrscheinlichkeitsverteilung der ZV X tn+1 ist nur der augenblickliche
Zustand maßgebend, nicht aber die frühere Entwicklung des Prozesses,
sprich wie man in diesen Zustand gelangt ist. Prozesse die die MarkovEigenschaft haben, werden Markov´sche Prozesse genannt. Prozesse mit
unabhängigen Zuwächsen sind immer markovsch.
Bemerkung:
Gaußscher Prozess
Ein SP heißt Gaußscher Prozess, wenn die zufälligen Vektoren für alle nTupel einer n-dimensionalen Normalverteilung genügen. (→Kap. 7.4.).
4.4. Markov´sche Ketten
Markov´sche Ketten sind „einfache“ stochastische Prozesse, mit deren Hilfe
grundlegende Probleme relativ einfach und anschaulich demonstriert werden
können. Sie können (im fortgeschrittenen Stadium) sogar bereits zur
Annäherung einer eindimensionalen Brownschen Bewegung benutzt werden.
Diplomarbeit Stochastische Prozesse
30
Georg Messerle LRT 2002
4. Stochastische Prozesse
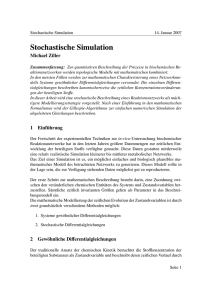
4.4.1. Markov´sche Ketten mit diskreter Zeit
Das Grundproblem wird wie folgt bezeichnet:
Es sei (Ω,F,P) ein Wahrscheinlichkeitsraum und Z der dazugehörige
Zustandsraum. Zwischen den Elementen von Z (also den möglichen
Zuständen) sind Übergangswahrscheinlichkeiten bestimmt.
Abb. 30. 1
Definition:
Ein stochastischer Prozess
{Xt , t ∈T}
mit dem Zustandsraum Z = {0,1, 2,...}
heißt Markov´sche Kette mit diskreter Zeit, falls T diskret ist und dieser
Prozess die Markov-Eigenschaft aufweist.
Die
pij = P ( X n +1 = j X n = i )
Wahrscheinlichkeiten
sind
die
einstufigen
Übergangswahrscheinlichkeiten der Markov´schen Kette (sie können i. A.
vom Zeitpunkt abhängen).
Eine
Markov´sche
Kette
heißt
homogen,
wenn
die
Übergangswahrscheinlichkeiten nicht vom Zeitpunkt abhängen. Es gilt also:
pij ( n ) = pij wobei n den Zeitpunkt bezeichnet.
Die Übergangswahrscheinlichkeiten (bei begrenzten Zustandräumen) werden
zweckmäßigerweise
in
der
Übergangswahrscheinlichkeiten
Transitionsmatrix
und
sie
ist
Matrix
zusammengefasst.
eine
der
Diese
stochastische
einstufigen
Matrix
Matrix,
d.h.
heißt
die
Zeilensummen sind gleich 1 und alle Einträge sind nichtnegativ. Es handelt
Diplomarbeit Stochastische Prozesse
31
Georg Messerle LRT 2002
4. Stochastische Prozesse
sich also um ein System von diskreten Zuständen, die eingenommen werden
können und zwischen denen Übergänge möglich und wahrscheinlich sind.
Beispielhaft hierfür sind sehr viele Lebenssachverhalte, so lassen sich z.B.
diskrete Erfolgswahrscheinlichkeiten alltäglicher Entscheidungsabfolgen, die
verschiedene
Resultate
herbeiführen
mit
Hilfe
Markov´scher
Ketten
abschätzen. Beispielsweise die Planung von Projekten mittels der Petri-Netze
im Projektmanagement oder Methoden der ökonomischen Evaluation im
Gesundheitswesen („der häufigste absorbierende Zustand ist der Tod“;
Kobelt[17]), basieren auf den Markov´schen Ketten. Betrachten wir nun die
Zusammenhänge zwischen den Zuständen dieser Ketten:
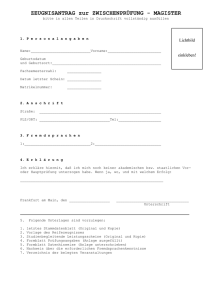
pij bezeichnet die Wahrscheinlichkeit, dass die Markov´sche Kette in einer
Zeiteinheit sprunghaft vom Zustand i in den Zustand j übergeht.
Abb. 31. 1
Bei mehreren in Frage kommenden Übergängen d.h.
mehreren, den Zustand i umgebenden möglichen
Zuständen j gilt stets:
∑p
j∈Z
Darüber
hinaus
ij
i∈Z
=1
lassen
sich
auch
mehrstufige
Übergangswahrscheinlichkeiten definieren:
Abb. 31. 2
pij( m ) = P ( X n + m = j X n = i )
Diplomarbeit Stochastische Prozesse
32
m = 1, 2,3,...
Georg Messerle LRT 2002
4. Stochastische Prozesse
Dies ist die Wahrscheinlichkeit, dass die Kette ausgehend vom Zustand i
nach m Zeitschritten im Zustand j angelangt ist. pij( m ) heißt die m-stufige
Übergangswahrscheinlichkeit.
Die m-stufigen Übergangswahrscheinlichkeiten werden in der Matrix der mstufigen Übergangswahrscheinlichkeiten zusammengefasst.
P ( m ) = ⎡⎣( pij( m ) ) ⎤⎦ mit m=1,2,3.. und i, j ∈ Z
Die Matrix der m-stufigen Übergangswahrscheinlichkeiten ergibt sich durch
m-malige
Multiplikation
der
Matrix
der
einstufigen
Übergangswahrscheinlichkeiten: P ( m ) = P m wobei P (1) = P
Ist eine Anfangsverteilung gegeben, so ist die Markov´sche Kette bei
Vorliegen
der
Matrix
der
einstufigen
Übergangswahrscheinlichkeiten
vollständig bestimmt. Es lassen sich dann alle n-dimensionalen Verteilungen
der Kette berechnen. Eine Anfangsverteilung ist eine Verteilung der Gestalt:
⎧
⎫
p (0) = ⎨ pi(0) = P ( X 0 = i ) ; i ∈ Z , ∑ pi(0) = 1⎬
i∈Z
⎩
⎭
Die
Summe
bedeutet
(Wahrscheinlichkeit
1)
dabei,
einen
dass
der
zur
das
Teilchen
Auswahl
mit
stehenden
Sicherheit
Zustände
einnehmen wird. Die Eingangswahrscheinlichkeit oder Anfangsverteilung
gibt also für jeden Zustand die Wahrscheinlichkeit an, dass die Kette in
diesem Zustand loszulaufen beginnt.
Ist der Vektor der Anfangsverteilungen bekannt können nun alle ndimensionalen Verteilungen aus p (0) und P berechnet werden:
P ( X 0 = i0 , X 1 = i1 ,..., X n = in ) = pi(0)
⋅ pi0i1 ⋅ pi1i2 ⋅ .... ⋅ pin−1in
0
Man kann darüber hinaus die absolute Verteilung nach m-Schritten
berechnen:
{p
(m)
j
(m)
= P ( X m = j ) ; j ∈ Z } mit p (jm ) = ∑ p (0)
j pij
i∈Z
Dies ist die Wahrscheinlichkeit, dass die Kette nach m Schritten einen
bestimmten Zustand j eingenommen hat. Da die Markov´schen Ketten große
praktische Bedeutung haben und die folgenden Überlegungen darauf
aufbauen, folgt ein
Diplomarbeit Stochastische Prozesse
33
Georg Messerle LRT 2002
4. Stochastische Prozesse
Beispiel:
N=3 → 3dimensionale Verteilung, bzw. 3 diskrete Zustände
Übergangsgraph:
1
1
1⎫
⎧
p (0) = ⎨ P ( X 0 = 1) = , P ( X 0 = 2) = , P ( X 0 = 3) = ⎬
3
3
3⎭
⎩
Anfangsverteilung:
Übergangsmatrix:
P
(1)
⎛ 0.7 0.4 0 ⎞
⎜
⎟
= P = ⎜ 0.6 0 0.2 ⎟
⎜ 0 0.3 0.5 ⎟
⎝
⎠
a) 3-dimensionale Verteilung
1
P ( X 0 = 1, X 1 = 2, X 2 = 3, X 3 = 2 ) = p (0) ⋅ p12 ⋅ p23 ⋅ p32 = ⋅ 0.4 ⋅ 0.2 ⋅ 0.3 = 0.008
3
b) absolute Verteilung nach m-Schritten
m=3, j=3
(m)
Mit p (jm ) = ∑ p (0)
j pij
i∈Z
und mit der dritten Potenz der Übergangsmatrix (z.B. Berechnung mit
Matlab)
⎛ 0.4000 0.4480 0.1260 ⎞
⎜
⎟
P = ⎜ 0.3840 0.1980 0.1460 ⎟
⎜ 0.1620 0.2190 0.1850 ⎟
⎝
⎠
3
gilt:
(3)
(3)
p3(3) = p1(0) p13(3) + p2(0) p23
+ p3(0) p33
1
1
1
p3(3) = ⋅ 0,126 + ⋅ 0,146 + ⋅ 0,185
3
3
3
= 0.15233
Diplomarbeit Stochastische Prozesse
34
Georg Messerle LRT 2002
4. Stochastische Prozesse
4.4.2. Die Gleichung von Chapman-Kolmogoroff
Bei mehrstufigen Übergangswahrscheinlichkeiten besteht der folgende
Zusammenhang:
p ( m )ij = ∑ pik( r ) pkj( m − r )
k∈Z
Die Wahrscheinlichkeit, nach m Schritten ausgehend vom Zustand i in den
zustand j übergegangen zu sein, lässt sich ausdrücken durch die Summe
der Wahrscheinlichkeiten nach r Schritten im Zustand k zu sein und von
dort ausgehend in den verbleibenden m-r Schritten den Zustand j zu
erreichen. Bei diskreten Zustandsräumen wie zum Beispiel der Irrfahrt auf
einem Graphen (siehe Kap. 5.1.1.) wird die Wahrscheinlichkeit p ( m )ij über
alle
möglichen
Zwischenzustände
aufsummiert.
Jede
Übergangswahrscheinlichkeit ist daher als Funktion aller k-1 übrigen
Übergangswahrscheinlichkeiten, sprich aller möglichen Zwischenzustände
darstellbar.
Bemerkung:
Man betrachte auf einem diskreten Zahlenstrahl die Zustände i=0 und j=4.
Man kann sich nun überlegen auf welchen Wegen, sprich über welche
Zwischenzustände mit m=6 Schritten vom Zustand 0 in den Zustand 4
übergegangen werden kann.
Speziell gilt:
p ( m )ij = pi(,mj −−11) p j −1, j + p (jm, j−+1)1 p j +1, j
(34.1)
Bei stetigen oder abzählbar unendlichen Zustandsräumen geht die Summe
zum (Stieltjes-) Integral über:
pij( m ) = ∫ pik( r ) pkj( m− r ) dk
Z
Diplomarbeit Stochastische Prozesse
35
Georg Messerle LRT 2002
4. Stochastische Prozesse
4.4.3. Langzeitverhalten Markov´scher Systeme
In diesem Abschnitt wird kurz auf das Langzeitverhalten der Markov´schen
Ketten im Allgemeinen eingegangen.
Um dieses Verhalten zu untersuchen betrachtet man zunächst das
Verhalten der Matrix P n für große Werte von n. Dies bedeutet in der Praxis,
dass wir das Verhalten der Wahrscheinlichkeit eines Überganges von i nach j
bei zunehmender Zeit anschauen.
Es erhebt sich also die Frage, ob der Grenzwert lim P n existiert oder nicht.
n →∞
Tatsächlich gibt es diesen Grenzwert. Er wird mit Π bezeichnet und man
lim P n = Π
schreibt:
n →∞
Die Zeilen der Matrix sind identisch, wenn es ein v gibt, das die folgende
Bedingung erfüllt (Z sei als endlich vorausgesetzt):
1.
v ist ein Wahrscheinlichkeitsvektor, d.h.
∑v
i
= 1 und vi ≥ 0
i
2.
lim vP n = π , wobei π gleich einer Zeile der Matrix Π ist. Dies muss für
n →∞
jedes v gelten.
Ist
π
ein
Wahrscheinlichkeitsvektor,
kann
für
jede
Eingangswahrscheinlichkeit v geschrieben werden:
π = lim vP n
n →∞
Dann gilt:
(
)
π = lim vP n +1 = lim vP n P = π P
n →∞
n →∞
Man nennt den Vektor π eine invariante Wahrscheinlichkeitsverteilung von P.
In der Literatur ist manchmal auch von stationären Verteilungen oder
Steady-State-Verteilungen die Rede (Lawler[12]).
Bei Systemen mit diskreten, abgeschlossenen Zustandsräumen ergeben sich
mit hinreichend großer Zeit stationäre Verteilungen. Es sind dann Aussagen
Diplomarbeit Stochastische Prozesse
36
Georg Messerle LRT 2002
4. Stochastische Prozesse
möglich, mit welcher Wahrscheinlichkeit sich die Kette nach langer Zeit in
welchem Zustand befinden wird. Es wird gezeigt werden, dass diese
Aussagen bei stetigen, unendlichen Zustandsräumen nicht mehr möglich
sind.
4.4.4. Markov´sche Ketten mit stetiger Zeit, Markov-Prozess
Bisher haben wir Prozesse betrachtet, deren Zustandsraum diskret war und
zwischen dessen Zuständen wir Übergangswahrscheinlichkeiten definieren
konnten.
Definition:
Ein stetiger stochastischer Prozess ist ein Familie von Zufallsvariablen deren
Indizes Werte in T (üblicherweise T=[0,∞)) annehmen.
Als erster Schritt werden beim Übergang auf Markov-Prozesse die Anzahl der
Zustände
der
(Waubke[40]).
Zufallsgrößen
Analog
zur
als
kontinuierliche
Markov-Kette
gilt
für
Größe
angesetzt.
die
unbedingte
Wahrscheinlichkeit, die Gleichung von Chapman-Kolmogoroff:
∞
p ( xt ) =
∫ p(x
t
xt −1 ) p ( xt −1 ) dxt −1
−∞
Diese Beziehung kann man verwenden, um die Smoluchowski-ChapmanKolmogoroff-Vorwärtsgleichung aufzustellen:
∞
p( xt + h xt − h ) =
∫ p(x
t +h
xt ) p ( xt xt − h ) dxt
−∞
Lässt man die Zeitinkremente h gegen Null gehen, so führt dies auf einen in
der Zeit kontinuierlichen Markov-Prozess.
Der Übergang auf kontinuierliche Zeiten bedeutet, dass die Korrelation, die
nur von einem Zeitpunkt zum nächsten existiert, in eine Distribution
entartet.
Diplomarbeit Stochastische Prozesse
37
Georg Messerle LRT 2002
4. Stochastische Prozesse
Die Korrelationsfunktion lautet mithin:
ρ ( t , s ) = Aδ ( t − s )
wobei
δ
die
Dirac-Funktion
darstellt.
Die
Dirac-Funktion
ist
im
mathematischen Sinne eine verallgemeinerte Funktion oder Distribution (→
Kap. 6.4.1.). Der Parameter A ist ein Maß für die Intensität der Kopplung.
Wir werden diese Distribution als Anfangsbedingung bei der Lösung der
Fokker-Planck-Gleichung (Kap. 6.6.) benötigen. In Kap. 7.7.2. findet sich
eine Betrachtung der Korrelationsfunktion eines Wiener-Prozesses. In den
Kapiteln 6.3.1. und 7.4. wird die Entartung der gemeinsamen Verteilung
explizit gezeigt (Waubke[41], Karatzas/Shreve[396]).
Diplomarbeit Stochastische Prozesse
38
Georg Messerle LRT 2002
5. Zufällige Irrfahrt
5. Die zufällige Irrfahrt
5.1. Einfacher Random-Walk (zufällige Irrfahrt)
5.1.1. Einführung
Ausgehend von der Vorstellung Markov´scher Ketten, kann man die so
genannte zufällige Irrfahrt (Random-Walk) beschreiben, die als Vorstufe
eines Diffusionsprozesses wie der Brownschen Bewegung angesehen werden
kann. Es wird gezeigt werden, dass sich der Random-Walk in einen Wiener
Prozess überführen lässt und für beide dieselben konditionierenden
Gleichungen gelten.
Die allgemeine Theorie der zufälligen Irrfahrt findet, gleich den Markov´schen
Ketten, in vielen Bereichen des Alltags Anwendung, beispielsweise in der
Risikoanalyse; der Berechnung von Bahnen von Asteroiden im Interstellaren
Raum oder in der Festkörperphysik. Beim eindimensionalen Random-Walk,
hat ein Partikel genau zwei Nachbarzustände. Die Übergänge des Partikels
von einer Position zur Anderen finden in Einheitsschritten, entweder
vorwärts oder rückwärts, mit speziellen Wahrscheinlichkeiten statt. Im
mehrdimensionalen Fall bewegt sich der Läufer in Einheitsschritten parallel
zu den Koordinatenachsen wiederum vor oder zurück. Für einen Läufer, der
im Koordinatenursprung losläuft, kommen als mögliche Zustände alle
Punkte mit ganzzahligen Koordinaten in Frage. Im zweidimensionalen Raum
hat ein Zustand jeweils 4 umgebende Zustände, im dreidimensionalen Fall 6,
im n-dimensionalen Fall 2n Zustände. Um den Random-Walk näher zu
beschreiben, müssen die Übergangswahrscheinlichkeiten zwischen den
Zuständen
spezifiziert
werden.
Im
Allgemeinen,
müssen
die
Übergangswahrscheinlichkeiten nicht gleich sein, sondern können beliebige
Werte
nach
beliebigen
Übergangswahrscheinlichkeiten
Diplomarbeit Stochastische Prozesse
Vorschriften
gleich,
38
annehmen.
spricht
man
Sind
von
die
einem
Georg Messerle LRT 2002
5. Zufällige Irrfahrt
symmetrischen
Random-Walk,
da
jede
Richtung
gewissermaßen
gleichwahrscheinlich ist. Die Theorie der zufälligen Irrfahrt beruht letztlich
auf der Untersuchung von Folgen von Zufallsvariablen, welche von
einfachen,
diskreten
und
unabhängigen
Zufallsvariablen
bis
hin
zu
bedingten Zufallsvariablen reichen.
Zunächst wird eine Irrfahrt mit sowohl diskretem Parameterraum als auch
diskretem Zustandsraum betrachtet. Wir betrachten die zufällige Irrfahrt auf
einem völlig beliebigen Graphen der Gestalt von Abb.22.1, dessen Zustände
in völlig beliebiger Weise miteinander verbunden sind.
Die Zustände der Markov´schen Kette sind die Knotenpunkte des Graphen
und in jedem Zeitintervall springt die Kette rein
zufällig in einen mit dem Zustand i verbundenen
Zustand j (vgl. Abb. 23.2).
Schreibweise: v(i)~v(j) wenn die Zustände i und j
miteinander verbunden sind.
Die Matrix der Übergangswahrscheinlichkeiten ist
dann gegeben durch:
P (vi v j ) =
1
d (vi )
wobei
d (vi )
die Anzahl der
Verbindungen eines Zustandes i mit einem Zustand j darstellt. Es liegt die
Annahme zugrunde, dass alle Sprünge i→j gleichwahrscheinlich sind, also
die
Übergangswahrscheinlichkeiten
immer
nur
von
der
Anzahl
der
umgebenden Zustände abhängt. Es wird als Spezialfall mit vorausgesetzt,
dass im Fall d (vi ) =0 die Wahrscheinlichkeit P(vi vi ) = 1 beträgt [A8].
Diese Kette heißt zufällige Irrfahrt auf einem Graphen. Wenn nun die Menge
der Zustände endlich ist, ist die Transitionsmatrix P vollständig bestimmbar
und somit die Kette bei Vorliegen einer Eingangsverteilung vollständig
determiniert. Man kann also für jeden Zustand nach beliebig vielen Schritten
eine Wahrscheinlichkeit berechnen, auch ungeachtet dessen, wo die Kette
gestartet ist.
Diplomarbeit Stochastische Prozesse
39
Georg Messerle LRT 2002
5. Zufällige Irrfahrt
Im nächsten Abschnitt wird ein allgemeiner Ansatz für den Random-Walk
erarbeitet, das Verhältnis zur Theorie der Markov´schen Ketten erläutert und
die Markov-Eigenschaft bewiesen.
Definition:
Eine Zufallsvariable der Gestalt
Yn = X 1 + X 2 + ... + X n
heißt Random-Walk.
Man kann sich darunter die Position eines Partikels vorstellen, der entlang
einer Achse verschoben wird und zu jedem Zeitpunkt n den Zuwachs X n
erfährt. Die Variable Yn ist die Summe aller bis zum Zeitpunkt n erfolgten
Zuwächse (die natürlich auch negativ sein können) und bezeichnet somit die
Lage des Partikels oder Läufers zur Zeit n. Diese Definition enthält sich
jedweder
Aussagen
über
die
Beschaffenheiten
des
Zustands-
oder
Parameterraumes. Es können beide daher gleichermaßen stetig oder diskret
sein. Auch können die Zufallsvariablen X 1.... X n unabhängig und beliebig
verteilt sein. Zwar ist anschaulich klar, dass sich ein Partikel welches sich
an einer Position X n −1 befindet, sich im n-ten Schritt nicht unendlich weit
fortbewegen wird, sondern „wahrscheinlicher“ in einer gewissen Umgebung
seines Standortes eine neue Position einnehmen wird, jedoch ist diese
Möglichkeit nicht auszuschließen. In der Praxis werden die X n von den X n −1
abhängig sein und damit auch ihre Verteilungen. Eine wichtige, vollständig
äquivalente Definition ist die folgende:
X n = X n −1 + Z n
(40.1)
Z n bezeichnet hierbei den Zuwachs zum Zeitpunkt n, X n −1 den Standort des
Läufers einen Zeitschritt zuvor.
Es ist vorstellbar, das Position und Zuwachs unabhängig sind, jedoch ist mit
der Einführung des Zuwachsbegriffes bereits ein wesentliches Problem der
Diplomarbeit Stochastische Prozesse
40
Georg Messerle LRT 2002
5. Zufällige Irrfahrt
Stochastischen Prozesse umgangen worden: die Abhängigkeiten zwischen
den ZV und ihren Verteilungen bei infinitesimalen Zeitschritten, sprich bei
stetigem Parameterraum.
Im Folgenden wird ein einfacher Random-Walk auf einem diskreten,
abzählbar unendlichen Zustandsraum mit einem diskreten Parameterraum
betrachtet
und
Erwartungswert
und
Varianz
berechnet.
Es
wird
vorausgesetzt dass die Zufallsvariablen unabhängig sind und identische
Verteilungen besitzen.
Wir betrachten eine Folge von Zufallsvariablen X n mit n>1. Die Verteilungen
der ZV seien P ( X 1 = 1) = p und P ( X 1 = 0 ) = 1 − p = q . Man definiert nun eine
neue Zufallsvariable
n
Yn = ∑ X n mit n>1 und Y0 = 0 .
i =1
Es wird nun gezeigt, dass es sich dabei um eine Markov´sche Kette mit den
einstufigen Übergangswahrscheinlichkeiten
⎧ p, wenn j = i + 1
⎪
pij = ⎨ q, wenn j = i − 1
⎪
0, sonst
⎩
handelt und dass der Prozess die Markov-Eigenschaft hat.
Beweis:
Da die X n unabhängig sind, sind die Yn sowie die X n +1 ebenfalls unabhängig.
Es gilt:
P (Yn +1 = s Y0 = s0 ,..., Yn = sn )
= P (Yn + X n +1 = s Y0 = s0 ,..., Yn = sn )
= P ( X n +1 = s − sn Y0 = s0 ,..., Yn = sn )
= P ( X n +1 = s − sn )
Man erkennt, dass
sowohl die Zuwächse unabhängig vom Prozessverlauf
sind, als auch die Position zur Zeit n+1 nur von der Position zur Zeit n
abhängt (siehe Abschnitt 4.3.3.)
Diplomarbeit Stochastische Prozesse
41
Georg Messerle LRT 2002
5. Zufällige Irrfahrt
Gleichermaßen gilt:
P (Yn +1 = s Yn = sn ) = P (Yn + X n +1 = s Yn = sn )
= P ( X n +1 = s − sn Yn = sn ) = P ( X n +1 = s − sn )
Die
Übergangswahrscheinlichkeiten
sind
frei
wählbar,
nach
obiger
Voraussetzung unterscheiden sie sich für Schritte nach links oder rechts.
Wenn eine zufällige Irrfahrt X n = X n −1 + Z n durch die Verteilung
P ( Z n = 1) = p
P ( Z n = −1) = 1 − p = q
beschrieben wird, spricht man von einem einfachen Random-Walk. Es
handelt sich in diesem Fall um eine periodische, homogene Markov´sche
Kette. Die einstufigen Übergangswahrscheinlichkeiten sind für alle i,j durch
pij = pδ i +1, j + qδ i −1, j
beschrieben, wobei
⎧1, wenn j = i + 1
⎩ 0, sonst
δ i +1, j = ⎨
sowie
⎧1, wenn j = i − 1
⎩ 0, sonst
δ i −1, j = ⎨
die Kronecker-Symbole sind. Man braucht hier keine stochastische Matrix,
da die Verteilungen für alle i, j sofort aus der obigen Formel erhalten werden
können.
5.1.2. Erwartungswert und Varianz
Ungeachtet der Kenntnis der m-stufigen Übergangswahrscheinlichkeiten
können Erwartungswert und Varianz für den einfachen Random-Walk
angegeben werden.
Vorausgesetzt der Läufer startet im Punkt X 0 = 0 , ergibt sich mit der
Definition des Erwartungswertes:
Diplomarbeit Stochastische Prozesse
42
Georg Messerle LRT 2002
5. Zufällige Irrfahrt
n
1
⎛1
⎞
E ( X n ) = ∑ pi xi = 0 + n ⎜ (1) + ( −1) ⎟ = 0
2
⎝2
⎠
i =0
Der Erwartungswert ist also konstant Null, der Läufer wird sich im Mittel an
derselben Position befinden, bzw. jeweils gleichgroße Fluktuationen um den
Startpunkt ausführen.
Mit der Definition der Varianz und mit Hilfe der Momente ergibt sich:
σ 2 = m2 − m12
Dabei ist m12 = 0 , wegen E ( X n ) = 0 .
σ 2 = m2
Es verbleibt:
n
m2 = ∑ ( X i ) p j
2
wobei
i =1
x1 = −1
x2 = 1
die beiden möglichen Realisationen sind.
Es ergibt sich also:
2 1
2
⎛
m2 = n ⎜ ( −1) + (1)
2
⎝
1⎞
2
⎟ = n ⋅1 = σ
2⎠
Die Varianz ist n.
Die Kette wird sich im Mittel um n Schritte vom Mittelwert 0 entfernen, bzw.
mit zunehmender Zeit immer weiter vom Mittelwert abweichen. Die Formel
für die m-stufigen Übergangswahrscheinlichkeiten eines einfachen RandomWalk ergibt sich folgendermaßen:
5.1.3. Die m-stufigen Übergangswahrscheinlichkeiten des RW
Diplomarbeit Stochastische Prozesse
43
Georg Messerle LRT 2002
5. Zufällige Irrfahrt
Bei der Herleitung der m-stufigen Übergangswahrscheinlichkeiten setzt man
voraus, dass sich der Läufer nach 2n Schritten vom Startpunkt 0 aus
gesehen, wieder im selben Punkt befinden soll. Um dies zu erreichen muss
er sich genau n Schritte in die eine Richtung und dann wieder n Schritte in
die andere Richtung bewegen. Jeder Pfad, d.h. jede Kombination aus n
Bewegungen nach links und n Bewegungen nach rechts, ist dabei zulässig.
Das
bedeutet,
dass
beispielsweise
die
n
Linksschritte
nicht
alle
hintereinander ausgeführt werden müssen, sondern nur nach 2n Schritten
n Schritte in jede Richtung ausgeführt worden sein müssen. Ist p=q=1/2
2n
⎛1⎞
beträgt die Wahrscheinlichkeit jedes einzelnen Pfades PPfad = ⎜ ⎟ .
⎝2⎠
Wir
betrachten nun exemplarisch die Möglichkeiten, die ein Läufer hat, der sich
im Nullpunkt eines Zahlenstrahles befindet, in genau n Schritten einen
Zustand m zu erreichen. Um die Allgemeinheit zu wahren, setzen wir p≠q.
B eispiel:
Wir betrachten den Übergang von 0 nach m=2 in n=4 Schritten auf dem
Zahlenstrahl. Abbildung 34.1 zeigt die möglichen Übergangspfade:
Position des Läufers
3
3
2
2
1
1
0
1
0
0
0
-1
2
1
2
3
Pfad1
Pfad2
Pfad3
Pfad4
4
-1
Zeitschritte
Abb. 44.1
Diplomarbeit Stochastische Prozesse
44
Georg Messerle LRT 2002
5. Zufällige Irrfahrt
Alle vier Pfade weisen genau drei Rechtsschritte mit Wahrscheinlichkeit p
und einen Linksschritt mit Wahrscheinlichkeit q auf. Man erkennt ferner,
dass sich die Pfade nur dadurch unterscheiden, wann der Schritt nach links
ausgeführt wird. Die Wahrscheinlichkeit für einen Übergang, sprich einen
beliebigen dieser Pfade zu beschreiten, beträgt demnach PPfad = p3q . Mit den
Gesetzen der Kombinatorik lässt sich die Anzahl der Möglichkeiten
berechnen:
Bei einem Übergang 0→2 in n=4 Schritten, gibt es genau
⎛ 4 ⎞
⎛ n ⎞
⎟ = ⎛ 4 ⎞ = 4 und es gibt 4
⎜
⎟ Möglichkeiten. Im vorliegenden Fall ist ⎜
4
2
+
n
+
m
⎜⎜
⎟⎟ ⎜⎝ 3 ⎟⎠
⎜⎜
⎟⎟
⎝ 2 ⎠
⎝ 2 ⎠
Pfade.
Die Wahrscheinlichkeit einen der Pfade zu nehmen beträgt im allgemeinen
Fall
PPfad = p
⎛ n+m ⎞
⎜
⎟
⎝ 2 ⎠
q
⎛ n+m ⎞
n −⎜
⎟
⎝ 2 ⎠
und die Gesamtwahrscheinlichkeit:
(n)
0m
p
⎛ n ⎞ ⎛ n+m ⎞ ⎛ n−m ⎞
⎜
⎟ ⎜
⎟
= ⎜ n + m ⎟ p⎝ 2 ⎠ q⎝ 2 ⎠
⎜⎜
⎟⎟
⎝ 2 ⎠
(45.1)
Formel (45.1) gibt also einen Ausdruck für die Wahrscheinlichkeit an, dass
sich ein Läufer oder Partikel ausgehend vom Zustand 0 nach n Zeitschritten
im Zustand m befindet. Die Wahrscheinlichkeiten des Random-Walk als
solchem sind somit vollständig berechenbar.
Für große Werte von n wird nun eine Abschätzung der m-stufigen
Übergangswahrscheinlichkeiten gemacht, die erste Rückschlüsse auf das
asymptotische Verhalten der n-dimensionalen Verteilung des zufälligen
Vektors { X 1 ,..., X n } zulässt.
Diplomarbeit Stochastische Prozesse
45
Georg Messerle LRT 2002
5. Zufällige Irrfahrt
5.2. Verhalten eines Random-Walk für große n (n→∞)
Wir betrachten wiederum einen einfachen Random-Walk:
X n = X n −1 + Z n
Es ist gezeigt worden, dass Erwartungswert und Varianz durch
E ( Xn ) = 0
Var ( X n ) = n
gegeben sind.
Wenn n sehr groß wird, der Läufer also sehr viele Schritte macht und nun
wieder der Fall p=q=1/2 betrachtet wird, kann man die n- stufige
Übergangswahrscheinlichkeit für m<<n durch
1
2
⎪⎧ ⎛ m ⎞ ⎪⎫
⎛ 2 ⎞2
exp
−
⎨
⎜
⎟⎬
⎜
⎟
⎝πn ⎠
⎪⎩ ⎝ 2n ⎠ ⎭⎪
(n)
0m
p
abschätzen.
Beweis:
Wir
betrachten
zunächst
mit
Hilfe
der
Stirling´schen
Formel
zur
Abschätzung von Fakultäten großer n, den natürlichen Logarithmus der
Fakultät von n:
⎡⎛ n ⎞ n
⎤
ln n ! ≈ ln ⎢⎜ ⎟ 2π n ⎥
⎣⎢⎝ e ⎠
⎦⎥
n
⎛n⎞
= ln ⎜ ⎟ + ln 2π n
⎝e⎠
1⎞
1
⎛
= ⎜ n + ⎟ ln n − n + ln 2π
2⎠
2
⎝
(46.1)
Die Wahrscheinlichkeit p0( nm) lässt sich nach (45.1)
mit p=q=1/2 wie folgt
darstellen:
Diplomarbeit Stochastische Prozesse
46
Georg Messerle LRT 2002
5. Zufällige Irrfahrt
(n)
0m
p
n!
⎛1⎞
=
n + m ⎞ ⎛ n + m ⎞ ⎝⎜ 2 ⎠⎟
⎛
⎜n−
⎟ !⎜
⎟!
2 ⎠⎝ 2 ⎠
⎝
n+m
2
⎛1⎞
⎜ ⎟
⎝2⎠
n−
n+m
2
n!
⎛1⎞
=
n + m ⎞ ⎛ n + m ⎞ ⎝⎜ 2 ⎠⎟
⎛
⎜n−
⎟ !⎜
⎟!
2 ⎠⎝ 2 ⎠
⎝
n
(47.1)
Der natürliche Logarithmus von p0( nm) schreibt sich dann so:
⎛n−m⎞
⎛n+m⎞
⎛1⎞
ln p0( nm) = ln n !− ln ⎜
⎟ !− ln ⎜
⎟ !+ n ln ⎜ ⎟
⎝ 2 ⎠
⎝ 2 ⎠
⎝2⎠
(47.2)
Mit Formel (46.1) ist:
⎛ n − m ⎞ ⎛⎛ n − m ⎞ 1 ⎞ ⎛ n − m ⎞ ⎛ n − m ⎞ 1
ln ⎜
⎟! = ⎜ ⎜
⎟ + ⎟ ln ⎜
⎟−⎜
⎟ + ln 2π
⎝ 2 ⎠ ⎝⎝ 2 ⎠ 2 ⎠ ⎝ 2 ⎠ ⎝ 2 ⎠ 2
Und
⎛ n + m ⎞ ⎛⎛ n + m ⎞ 1 ⎞ ⎛ n + m ⎞ ⎛ n + m ⎞ 1
ln ⎜
⎟! = ⎜ ⎜
⎟ + ⎟ ln ⎜
⎟−⎜
⎟ + ln 2π
⎝ 2 ⎠ ⎝⎝ 2 ⎠ 2 ⎠ ⎝ 2 ⎠ ⎝ 2 ⎠ 2
Eingesetzt in (47.2) ergibt sich folgendes:
⎡⎛ ⎛ n − m ⎞ 1 ⎞ ⎛ n − m ⎞ ⎛ n − m ⎞ 1
⎤
1⎞
1
⎛
ln p0( nm) = ⎜ n + ⎟ ln n − n + ln 2π − ⎢⎜ ⎜
⎟ + ⎟ ln ⎜
⎟−⎜
⎟ + ln 2π ⎥
2⎠
2
⎝
⎣⎝ ⎝ 2 ⎠ 2 ⎠ ⎝ 2 ⎠ ⎝ 2 ⎠ 2
⎦
⎡⎛ ⎛ n + m ⎞ 1 ⎞ ⎛ n + m ⎞ ⎛ n + m ⎞ 1
⎤
− ⎢⎜ ⎜
⎟ + ⎟ ln ⎜
⎟−⎜
⎟ + ln 2π ⎥ − n ln 2
⎣⎝ ⎝ 2 ⎠ 2 ⎠ ⎝ 2 ⎠ ⎝ 2 ⎠ 2
⎦
Nach Ausmultiplizieren und Kürzen ergibt sich:
1
1
1
⎛n−m⎞ ⎛n−m⎞
ln p0( nm) = n ln n + ln n − n + ln 2π − ( n − m + 1) ln ⎜
⎟+⎜
⎟
2
2
2
⎝ 2 ⎠ ⎝ 2 ⎠
1
1
⎛n+m⎞ ⎛n+m⎞ 1
− ln 2π − ( n + m + 1) ln ⎜
⎟+⎜
⎟ − ln 2π − n ln 2
2
2
⎝ 2 ⎠ ⎝ 2 ⎠ 2
Diplomarbeit Stochastische Prozesse
47
Georg Messerle LRT 2002
5. Zufällige Irrfahrt
Es gilt nun:
m
⎛m+n⎞
ln ⎜
⎟ = ln1 − ln 2 + ln n + ln(1 + )
n
⎝ 2 ⎠
Die verbleibende Komponente ln(1 +
m
) kann nun mit der bekannten
n
Taylorreihenentwicklung ln x ≈ x – ½ x² wie folgt angenähert werden
(Merziger/Wirth [Umschlagseite]):
m
m m2
ln(1 + ) ≈ − 2
n
n 2n
Es ergibt sich also:
⎡⎛ n m 1 ⎞ ⎛
1⎞
m m2 ⎞ ⎤
⎛
ln p0( nm) = ⎜ n + ⎟ ln n − ⎢⎜ − + ⎟ ⎜ − ln 2 + ln n − − 2 ⎟ ⎥
2⎠
n 2n ⎠ ⎦
⎝
⎣⎝ 2 2 2 ⎠ ⎝
⎡⎛ n m 1 ⎞ ⎛
m m2 ⎞⎤ 1
− ⎢⎜ + + ⎟ ⎜ − ln 2 + ln n + − 2 ⎟ ⎥ − ln 2π − n ln 2
n 2n ⎠ ⎦ 2
⎣⎝ 2 2 2 ⎠ ⎝
Nach Ausmultiplizieren und Kürzen [A9] verbleibt:
ln p0( nm) = −
Die
n-stufige
m2 m2 1
1
1
+ 2 + ln 2 − ln n − ln π
2n 2n 2
2
2
Übergangswahrscheinlichkeit
lautet
nach
Bildung
der
Umkehrfunktion
(n)
0m
p
1
1
1
⎧ m2 m2 ⎫
−
−
= exp {ln p } = exp ⎨−
+ 2 ⎬ exp {ln 2} 2 exp {ln n} 2 exp {ln π } 2
⎩ 2n 2n ⎭
(n)
0m
1
(n)
0m
p
⎧ m2 m2 ⎫
⎛ 2 ⎞2
=⎜
+ 2⎬
⎟ exp ⎨−
⎝πn ⎠
⎩ 2n 2n ⎭
(48.1)
Man kann erkennen, dass sich die Verteilungsfunktion einer zufälligen
Irrfahrt für große Werte von n, einer Normalverteilung annähert, da für
Diplomarbeit Stochastische Prozesse
48
Georg Messerle LRT 2002
5. Zufällige Irrfahrt
große n der Term
m2
im Exponenten vernachlässigt werden kann. Die
2n 2
Wahrscheinlichkeit, dass sich ein Läufer nach n Schritten zwischen zwei
festen, vorgegebenen Zuständen befindet, kann deshalb folgendermaßen
approximiert werden:
j
2
t
−
1
2n
P (i ≤ X n ≤ j ) =
e
dt
2π n ∫i
Es handelt sich hierbei um eine der wichtigsten Aussagen des zentralen
Grenzwertsatzes (Kap. 7.3.1.) (Billingsley[357], Beichelt/Montgomery[96]). Die
Verteilung des Random-Walk zeigt bei zunehmendem n eine Asymptotik
gegen die N(0,1)-Verteilung..
Wie bei jeder anderen Normalverteilung liegen auch hier 99.73% aller Werte
im Intervall [nµ-3 n σ, nµ+3 n σ]. Anders ausgedrückt: nach n Schritten
befindet sich ein Läufer mit Wahrscheinlichkeit 0.9973 im besagten
Intervall.
5.2.1. Abschätzung der Aufenthaltswahrscheinlichkeiten
Eine interessante Beobachtung lässt sich nun für den Grenzfall n→∞
machen. Im vorhergehenden Abschnitt wurde gezeigt, dass bei endlichem
Zustandsraum und beliebigem Parameterraum zu jeder Zeit eine Aussage
über die voraussichtliche Position eines Partikels oder Läufers möglich ist.
Im Fall n→∞ erweitern wir nun den Parameterraum auf T = [0, ∞) und setzen
einen unbeschränkten Zustandsraum voraus. Wir betrachten dann das
Verhalten der Verteilungsfunktionen, sprich der Möglichkeit Aussagen über
die Lage des Partikels zu machen.
Wir betrachten:
j
lim P ( i ≤ X n ≤ j ) = lim ∫
n →∞
n →∞
i
⎛ ( x − nµ ) 2 ⎞
1
exp ⎜
⎟dx
2n ⎠
2π n
⎝
Der Mittelwert µ ist dabei nach Voraussetzung Null.
Diplomarbeit Stochastische Prozesse
49
Georg Messerle LRT 2002
5. Zufällige Irrfahrt
Mit der Substitution
z=
x
x2
→ z2 =
2n
2n
ergibt sich die Exponentialfunktion zu exp ( z 2 ) und die Änderung der
Integrationsvariablen bewirkt
dz
1
=
→ dx = 2ndz
dx
2n
Mit der Transformation der Grenzen i und j in
z1 =
i
2n
j
2n
und z2 =
Schreibt sich das Integral folgendermaßen:
z2
1
lim P ( i ≤ X n ≤ j ) = lim ∫
n →∞
n →∞
πn
z1
exp ( z 2 )dz
Zieht man die konstanten Terme vor das Integral und betrachtet das
Konvergenzverhalten der Grenzen für große n, so ergibt sich folgendes:
lim P ( i ≤ X n ≤ j ) = lim
n →∞
mit dem Integrationsbereich z2 − z1 =
n →∞
1
z2
exp ( z )dz
πn ∫
2
z1
j −i
, der für große n gegen Null strebt.
πn
Der gesamte Grenzwert ist wegen der Monotonie der e-Funktion Null.
Das bedeutet, dass die Wahrscheinlichkeit einen Partikel nach n→∞
Schritten in einem beliebigen Intervall [i, j] anzutreffen, verschwindet
(Srinivasan/Mehata[96]). Nach hinreichend langen Zeiträumen sind dann
keine Aussagen mehr über die wahrscheinliche Position des Partikels
möglich (→Kap. 7.4.).
Diplomarbeit Stochastische Prozesse
50
Georg Messerle LRT 2002
5. Zufällige Irrfahrt
5.3. Der stetige Random-Walk als Approximation des WienerProzesses
Wie bereits eingeführt, handelt es sich bei einem einfachen Random-Walk
um eine einfache, diskrete Form eines Diffusionsprozesses. Im folgenden
Abschnitt wird zunächst die stetige Version des Random-Walk konstruiert
und dann nachgewiesen, dass es sich dabei tatsächlich um einen
Diffusionsprozess handelt.
Wir betrachten noch einmal einen diskreten RW:
Es sei { X n } eine unendliche Folge von Zufallsvariablen für die gilt:
X n = X n −1 + Z n und X 0 = 0
n=1,2,3…
Die Verteilung von Z n ist
P( Z n = 1) = p und P( Z n = −1) = 1 − p = q
{ X n}
modelliert wieder die Position des Partikels nach n Schritten, der eine
zufällige Irrfahrt auf dem Strahl der ganzen Zahlen, beginnend beim
Nullpunkt, ausführt. Für die n-stufigen Übergangswahrscheinlichkeiten gilt
wieder Gleichung (45.1).
Abweichend von der vorhergehenden Anschauung wird nun angenommen,
dass der Partikel ausgehend von x=0 nach jeweils ∆t (vorher ganzzahlige
Sprünge mit Betrag 1) Zeiteinheiten um ∆x Längeneinheiten (vorher um
ganze Einheiten der Länge 1) nach links oder rechts springt. Wir nehmen
darüber hinaus an, dass die aufeinander folgenden Schritte der Irrfahrt im
Intervall ∆t plötzlich erfolgen und in getrennten Intervallen ∆t stattfinden.
Die Verteilung der Zuwächse sei wieder
P ( Z n = −∆x) = P ( Z n = ∆x) =
1
2
Es sei nun { X t } die Lage des Partikels zum Zeitpunkt t. Es gilt dann:
Diplomarbeit Stochastische Prozesse
51
Georg Messerle LRT 2002
5. Zufällige Irrfahrt
⎛
⎞
X t = ∆x ⎜ X 1 + X 2 + ... + X t ⎟
∆t ⎠
⎝
denn falls t ein Vielfaches von ∆t ist, bestimmt
t
die Anzahl der in der Zeit t
∆t
gemachten Schritte, wobei die Zufallsvariable X i die Werte +1 und -1 für
links oder rechts annimmt. Erwartungswert und Varianz dieses Prozesses
ergeben sich wie folgt:
Man kann schreiben:
⎛ −∆x ∆x ⎞
⎟
PX = ⎜ 1
1⎟
⎜⎜
⎟
⎝ 2
2⎠
Für den Erwartungswert gilt:
⎡1
n
1
⎤
µ = ∑ p j x 0j = n ⎢ ( −∆x ) + ( ∆x ) ⎥ = 0
2
⎣2
⎦
j =1
Var ( X i ) = ∆x 2
Die Varianz jeder einzelnen ZV X i ist:
Mit
(52.1)
⎛ n
⎞ n
Var ⎜ ∑ X i ⎟ = ∑ Var ( X i )
⎝ i =1 ⎠ i =1
(Unkorreliertheit vorausgesetzt)
gilt hier:
n
2
2 ⎡ t ⎤
Var ( X t ) = ∑ ( ∆x ) = ( ∆x ) ⎢ ⎥
⎣ ∆t ⎦
i =1
(52.2)
Wenn nun ∆t→0 und n→∞, sowie ∆x→0 gehen, erhalten wir die stetige
Version der zufälligen Irrfahrt.
Ziel ist es, das Verhalten des Prozesses
{ X t , t ≥ 0}
für ∆t→0 und ∆x→0 zu
untersuchen. Um ein sinnvolles Ergebnis zu erzielen, wendet man folgenden
Trick an: ∆x und ∆t werden ohne Beschränkung der Allgemeinheit so
gewählt, dass für ein beliebiges σ>0 die folgende Beziehung gilt:
∆x = σ ∆t
Diplomarbeit Stochastische Prozesse
52
(52.3)
Georg Messerle LRT 2002
5. Zufällige Irrfahrt
Forderung:
Der
aus
dem
Grenzübergang
resultierende
stochastische
Prozess
{ X t , t ≥ 0} hat die Eigenschaften
E ( Xt ) = 0
und
Var ( X t ) = σ 2t .
Beweis:
Wir setzen somit voraus, dass der Prozess den wir nach Bildung des Limes
erhalten, den Mittelwert µ=0 und die Varianz σ 2t hat.
Daraus folgt:
lim ( ∆x )
∆x → 0
∆t → 0
und
2
t
= σ 2t
∆t
lim ( p − q ) ∆x
∆x → 0
∆t → 0
(53.1)
t
=0
∆t
Bemerkung:
In unserem Fall ist der Mittelwert von vorne herein Null, da p=q gilt. Die
obige Gleichung ist in diesem Fall trivial. Allgemein kann diese Identität aber
nicht vorausgesetzt werden.
Es ist leicht einsehbar, dass nach Umschreibung der obigen Grenzwerte
mittels der gewählten Beziehung, die Varianz auch bei stetigem Parameterund Zustandsraum endlich ist und den Wert Var ( X t ) = tσ 2 annimmt.
Als Ergebnis des Grenzüberganges ∆x→0 und ∆t→0 einer zufälligen Irrfahrt,
erhalten wir einen stochastischen Prozess
{ X t , t ≥ 0} ,
mit t ∋ T = [0, ∞ ) und
stetigem Zustandsraum, dessen Erwartungswert nach wie vor Null ist und
der die Varianz Var ( X t ) = tσ 2 besitzt.
Es muss nun nachgewiesen werden, dass dieser Prozess tatsächlich einen
Diffusionsprozess beschreibt und dass es sich letztlich um einen WienerProzess handelt.
Diplomarbeit Stochastische Prozesse
53
Georg Messerle LRT 2002
5. Zufällige Irrfahrt
5.3.1. Die Fokker-Planck-Gleichung/Diffusionsgleichung
Wie
aus
anderen
(Strömungsmechanik,
ingenieurwissenschaftlichen
Werkstoffkunde,
Wärme-
und
Disziplinen
Stoffübertragung)
bekannt, genügen Diffusions- oder Wärmeleitungsprozesse der so genannten
Diffusions- oder Wärmeleitungsgleichung (Baehr[56]). Es handelt sich hierbei
um eine partielle Differentialgleichung 2.Ordnung in der Form:
∂
∂2 f
f =D 2
∂t
∂x
(54.1)
Da stochastische Prozesse u.a. Diffusionsprozesse beschreiben, genügen
auch sie dieser Gleichung. Umgekehrt kann mit Hilfe dieser Gleichung
nachgeprüft werden, ob ein stochastischer Prozess ein Diffusionsphänomen
beschreibt oder nicht. Im nächsten Abschnitt werden die groben Züge der
allgemeinen Ableitung dieser Gleichung vorgestellt und ihre Beziehung zu
den stochastischen Prozessen aufgezeigt. Eine genaue Herleitung findet sich
in Srinivasan/Mehata[210ff] und Risken/Haken[20ff].
Auf
der
Basis
von
Differentialgleichungen
Markov-Prozessen
lösen.
Der
lässt
sich
Sonderfall
eine
der
Vielzahl
von
Brownschen
Molekularbewegung wurde von Fokker 1914 und Planck 1917 gelöst. Die
allgemeine Lösung des Problems von partiellen Differentialgleichungen in
Verbindung mit stochastischen Prozessen stammt von Kolmogoroff 1931.
Es sei p( y, t2 , x, t1 ) die Dichtefunktion der Übergangswahrscheinlichkeiten,
also die Dichte der Wahrscheinlichkeit, dass die Zufallsvariable zum
Zeitpunkt t2 den Wert y annimmt, wenn zum Zeitpunkt t1 der Wert x=X( t1 )
vorgelegen hat.
Diplomarbeit Stochastische Prozesse
54
Georg Messerle LRT 2002
5. Zufällige Irrfahrt
Ausgehend von der Gleichung von Chapman-Kolmogoroff und der Inversion
der charakteristischen Funktion von p, wird die Fokker-Planck-Gleichung
abgeleitet (Srinivasan/Mehata[122]).
Es ergibt sich:
∂
∂
1 ∂2
p (t , x, y ) = − [ K1 ( y ) p(t , x, y )] +
[ K 2 ( y) p(t , x, y)]
∂t
∂y
2 ∂y 2
Die beiden Koeffizienten K1 und K 2 stellen Drift- und Diffusionskoeffizenten
dar.
Für K1 = 0 und K 2 = 2 D nimmt sie die Form der Diffusionsgleichung an:
∂
∂2
p( y, t ) = D 2 p ( y, t )
∂t
∂x
Man kann nun nachweisen, dass ein Random-Walk der Diffusionsgleichung
genügt:
5.3.2. Die zufällige Irrfahrt als Wiener-Prozess
Ausgangspunkt ist die Gleichung von Chapman-Kolmogoroff für die nstufigen Übergangswahrscheinlichkeiten:
p (jkn ) = p (jn,k−−1)1 p + p (jn,k−+1)1q
(55.1)
Bemerkung:
Die Gleichung (55.1) wird aus (34.1) durch Umbenennen von j in k und die
Gleichsetzungen
p = p j −1, j
und
q = p j +1, j
gewonnen.
Es
wird
somit
vorausgesetzt, dass die Wahrscheinlichkeiten für einen Rechts- bzw.
Linksschritt über den gesamten Zustandsraum konstant sind.
Diplomarbeit Stochastische Prozesse
55
Georg Messerle LRT 2002
5. Zufällige Irrfahrt
Es sei nun P ( k n ) die Verteilungsfunktion der Position eines Partikels nach n
Zeitschritten. Nach (34.1) kann P ( k n ) für jedes feste j folgendermaßen
geschrieben werden:
P ( k n ) = P ( k − 1 n − 1) p + P ( k + 1 n − 1) q
(56.1)
Wenn die P ( k n ) stetige Verteilungen sind, kann man auch schreiben:
P ( x , t ) = P ( x − ∆x t − ∆ t ) p + P ( x + ∆ x t − ∆ t ) q
(56.2)
Taylor-Entwicklung:
∆x ) ∂ 2
(
∂
∂
2
P ( x − ∆x t − ∆t ) = P ( x, t ) − ∆t P ( x, t ) − ∆x P ( x, t ) +
P ( x, t ) + o ( ∆ x )
2
∂t
∂x
2! ∂x
2
und
∆x ) ∂ 2
(
∂
∂
3
P ( x + ∆x t − ∆t ) = P ( x, t ) − ∆t P ( x, t ) + ∆x P ( x, t ) +
P ( x, t ) + o ( ∆ x )
2
∂t
∂x
2! ∂x
2
Einsetzen in Gleichung (57.2) liefert:
2
⎛
⎞
∆x ) ∂ 2
(
∂
∂
,
P ( x, t ) = ⎜ P ( x, t ) − ∆t P ( x, t ) − ∆x P ( x, t ) +
P
x
t
⎟p
(
)
2
⎜
⎟
2!
t
x
x
∂
∂
∂
⎝
⎠
2
⎛
⎞
∆x ) ∂ 2
(
∂
∂
,
P
x
t
+ ⎜ P ( x, t ) − ∆t P ( x, t ) + ∆x P ( x, t ) +
⎟q
(
)
2
⎜
⎟
2!
t
x
x
∂
∂
∂
⎝
⎠
Nach Ausmultiplizieren und Kürzen ergibt sich:
( ∆x ) ∂ 2 P x, t
∂
∂
∆t P ( x, t ) = ( q − p ) ∆x P ( x, t ) +
( )
∂t
∂x
2 ∂x 2
2
Diplomarbeit Stochastische Prozesse
56
(56.3)
Georg Messerle LRT 2002
5. Zufällige Irrfahrt
Davon ausgehend wird der Grenzübergang ∆t→0 und ∆x→0 beobachtet. Mit
∆x 2
= σ 2 und µ=0 (alias q=p) schreibt sich (56.3) als
∆ x → 0 ∆t
∆t → 0
den Voraussetzungen lim
∂P
∆x ∂P ∆x 2 ∂ 2 P
= (q − p)
+
∂t
∆t ∂x 2∆t ∂x 2
Der Grenzübergang ergibt:
∂P
∆x ∂P
∆x 2 ∂ 2 P
= lim (q − p)
+ lim
∆x →0 ∂t
∆x →0
→0 2∆t ∂x 2
∆t ∂x ∆∆xt →
∆t →0
∆t →0
0
lim
∂P
∂t
0, n.V .
σ 2 ∂2P
2 ∂x 2
Schließlich verbleibt:
∂P σ 2 ∂ 2 P
=
∂t
2 ∂x 2
(57.1)
was die Form der eingangs angegebenen Diffusionsgleichung (54.1) hat. Ein
einfacher Random-Walk genügt also der Fokker-Planck-Gleichung. Wie noch
gezeigt werden wird, sind die Übergangswahrscheinlichkeiten des WienerProzesses und die Verteilungen des einfachen RW gleichermaßen Lösungen
der
Diffusionsgleichung.
Die
zufällige
Irrfahrt
genügt
aufgrund
der
Asymptotik ihrer Verteilungen gegen die N(0,1)-Verteilung den Gesetzen des
Wiener-Prozesses (Einstein 1905).
Diplomarbeit Stochastische Prozesse
57
Georg Messerle LRT 2002
6. Mehrdimensionale Normalverteilung
6.
Mehrdimensionale (Gaußsche Normal-)Verteilungen
6.1. Definition und Einführung der Gaußschen Normalverteilung
Die Sonderstellung der Gaußschen Normalverteilungen und unter ihnen der
N(0,1)-Verteilung, begründet sich aus dem Zentralen Grenzwertsatz. Die
Gaußschen Verteilungen finden sich in vielen Bereichen der Technik und der
Natur. Darüber hinaus hat diese Verteilung auch schöne mathematische
Eigenschaften, wie Symmetrie und Faltungsstabilität. Wie wir bereits
gesehen haben sind auch die Zuwächse einer zufälligen Irrfahrt nach
hinreichend langer Zeit asymptotisch normalverteilt. Da gezeigt worden ist,
dass der RW den Gesetzen eines Wiener-Prozesses genügt, ist anzunehmen,
dass auch die Inkremente der Brownschen Bewegung dieser Verteilung
gehorchen. Die Einführung dieser Verteilung, ihrer Eigenschaften sowie ihre
Verallgemeinerung auf beliebig viele Dimensionen sind der Hauptgegenstand
dieses Kapitels. Darüber hinaus wird auf mehrdimensionale Verteilungen im
Allgemeinen eingegangen und es werden grundlegende Vorbereitungen für
das Verständnis der Brownschen Bewegung getroffen.
Definition:
Es seien a,σ reelle Zahlen, wobei σ>0 ist.
Die Gaußsche Normalverteilung N(a, σ²) ist ein Wahrscheinlichkeitsmaß
1
definiert über der Borel´schen σ-Algebra des
, dessen Dichtefunktion die
Form(Lifshits[1]):
1
ρ (r ) =
e
2πσ
−( r − a )
2
2σ 2
besitzt.
Diplomarbeit Stochastische Prozesse
59
Georg Messerle LRT 2002
6. Mehrdimensionale Normalverteilung
Abb. 60.1
Es gilt (Normierungsbedingung):
∞
∫ ρ ( r )dr = 1
−∞
In der Familie der Gaußschen Normalverteilungen N={N(a, σ²)} nimmt die
Standardnormalverteilung
Grenzwertsatz,
Kap.
N(0,1)
7.3.1.)
eine
ein.
Sonderstellung
Deswegen
hat
sie
(→Zentraler
eine
spezielle
Schreibweise:
Φ (r ) =
1
2π
∞
⎧ −u 2 ⎫
exp
∫−∞ ⎩⎨ 2 ⎭⎬du
6.1.1. Eigenschaften Gaußscher Verteilungen
1) Die Dichte ist symmetrisch zum Punkt a und weist ein Maximum bei
r = a auf, welches den Wert
Diplomarbeit Stochastische Prozesse
1
besitzt.
2πσ
60
Georg Messerle LRT 2002
6. Mehrdimensionale Normalverteilung
2) Wenn sich r von a fortbewegt, fällt ρ ( r ) monoton und extrem schnell.
Man
kann
beweisen,
dass
mehr
als
99.7%
der
gesamten
Wahrscheinlichkeitsmasse im Intervall [a-3σ, a+3σ] liegen. Der Punkt a
ist der Schwerpunkt (das Baryzentrum) der Verteilung.
3) Große
Bedeutung
hat
ihre
Laplace-Transformation,
die
sog.
momentenerzeugende Funktion (Lifshits[2]) (→Kap. 6.5.1.):
Λ (γ ) =
∞
∫ e ρ ( r ) dr = e
γr
(
)
⎛1
2 2 ⎞
⎜ aγ +σ γ ⎟
⎝2
⎠
−∞
4) N(a, σ²) ist faltungsstabil, d.h. N ( a1 , σ 12 ) ∗ N ( a2 , σ 2 2 ) = N ( a1 + a2 , σ 12 + σ 2 2 ) .
Wie noch ausführlich gezeigt werden wird, folgt daraus, dass die
gemeinsame Verteilung der Summe unabhängiger Zufallsvariablen
durch die Faltung gegeben ist; (Beichelt/Montgomery[83]) (→Kap. 6.2.).
Im Folgenden wird zunächst anhand des Beispiels von zweidimensionalen
Zufallsvariablen die Definition der Faltung erarbeitet und darauf aufbauend
das Kalkül auf n-Dimensionen erweitert.
6.2. Die Faltungsstabilität der Normalverteilung
Als Vorstufe zu den mehrdimensionalen Zufallsvariablen, bzw. Summen
mehrerer Zufallsvariabler (z.B. der Position eines Partikels), betrachten wir
eine zweidimensionale Zufallsgröße. Man könnte diese auch als einen
zweistufigen stochastischen Prozess mit T = {1,2} interpretieren.
Sind die Zufallsvariablen unabhängig und schreiben wir Z = X 1 + X 2 als die
Summe von X 1 und X 2 , so lässt sich die Verteilungsfunktion FZ ( z ) wie aus
der Vorlesung bekannt, folgendermaßen bestimmen (Marti[57]):
Diplomarbeit Stochastische Prozesse
61
Georg Messerle LRT 2002
6. Mehrdimensionale Normalverteilung
FZ ( z ) = P ( Z ≤ z ) =
∞ z − x1
∫ ∫ f ( x , x )dx dx
1
2
1
2
−∞ −∞
Man summiert über alle z, die der Bedingung z ≤ x1 + x2 genügen. Sind die
Zufallsvariablen unabhängig gilt wie wir behaupten:
FZ ( z ) =
∞
∫
FX 2 ( z − x1 )dFX1 =
−∞
∞
∫ F (z − x ) f
1
X2
X1
dx1
−∞
denn wegen der Unabhängigkeit gilt f ( x1 , x2 ) = f X1 ( x1 ) f X 2 ( x2 ) und es
folgt mit Vertauschung der Integrationen:
∞ z − x1
∫ ∫
−∞ −∞
f X1 ( x1 ) f X 2 ( x2 ) dx1dx2 =
∞
∫
−∞
⎛ z − x1
⎞
f X1 ( x1 ) ⎜ ∫ f X 2 ( x2 ) dx2 ⎟dx1
⎜
⎟
⎝ −∞
⎠
FX 2 ( z − x1 )
∞
=
∫
f X1 ( x1 )FX 2 ( z − x1 ) dx1
−∞
Mit
f X1 ( x1 ) =
∂FX1 ( x1 )
∂x1
dx1 =
und daraus folgend
1
f X1 ( x1 )
dFX1 ( x1 )
ergibt sich:
P(Z ≤ z) =
∞
∫ F ( z − x ) dF
1
X2
(62.1)
X1
−∞
Die Verteilungsdichte ergibt sich zu:
fZ ( z ) =
∞
dFZ ( z ) d ∞
d
=
F
z
−
x
f
x
dx
=
FX ( z − x1 ) f X1 ( x1 ) dx1
(
)
(
)
1
1
1
X2
X1
∫
∫
dz
dz −∞
dz 2
−∞
f X 2 ( z − x1 )
fZ ( z ) =
∞
∫
f X 2 ( z − x1 ) f X1 ( x1 ) dx1
(62.2)
−∞
Diplomarbeit Stochastische Prozesse
62
Georg Messerle LRT 2002
6. Mehrdimensionale Normalverteilung
Diese
Operation
ist
in
allgemeiner
Form
als
Faltung
bekannt
(Beichelt/Montgomery[83], Bailey[7]). Die Lösung der Faltungsintegrale ist i.A.
sehr schwierig und kann nur in einigen Sonderfällen von Hand durchgeführt
werden.
Beispiel:
Es seien X 1 und X 2 normalverteilte, unabhängige Zufallsvariablen mit den
Parametern µ1 , σ 12 und µ 2 , σ 2 2 .
Die Dichte der Verteilungsfunktion ihrer Summe Z = X 1 + X 2 ist dann:
∞
fZ ( z) =
∫
−∞
⎧⎪ 1 ⎛ z − x − µ ⎞ 2 ⎫⎪ 1
⎧⎪ 1 ⎛ x − µ ⎞ 2 ⎫⎪
2
1
exp ⎨− ⎜
exp ⎨− ⎜
⎟ ⎬
⎟ ⎬ dx
σ
σ
2
2
πσ
2πσ 2
2
2
⎠ ⎭⎪
1
⎩⎪ ⎝
⎩⎪ ⎝ 1 ⎠ ⎪⎭
1
⎧⎪ 1 ( z − x − µ 2 )2 1 ( x − µ1 )2 ⎫⎪
=
∫ exp ⎨⎪− 2 σ 22 − 2 σ 12 ⎬⎪dx
2πσ 1σ 2 −∞
⎩
⎭
1
∞
Schreibt man u = x − µ1 und v = z − µ1 − µ2
→
z − x − µ2 = v − u
und verwendet die Substitution
t=
kann man
σ 2 2 + σ 12
σ1
u−
v
σ 1σ 2
σ 2 σ 2 2 + σ 12
und
dx =
σ 1σ 2
σ 2 2 + σ 12
dt
f Z ( z ) nach längerem Umformen (Beichelt/Montgomery[83]) auf
diese Form bringen:
⎧⎪
⎫⎪ ∞ − t 2
v2
fZ ( z) =
e 2 dt
exp ⎨
2
2 ⎬ ∫
2
2
+
σ
σ
2
2π σ 2 + σ 1
1 )⎪
⎪⎩ ( 2
⎭ −∞
1
Das Integral nimmt den Wert
2π (Bronstein/Semendjaev[305]) an und es
verbleibt:
Diplomarbeit Stochastische Prozesse
63
Georg Messerle LRT 2002
6. Mehrdimensionale Normalverteilung
fZ ( z) =
⎧⎪ ( z − µ − µ )2 ⎫⎪
1
2
exp ⎨
2
2 ⎬
2
2
2π (σ 2 + σ 1 )
⎩⎪ 2 (σ 2 + σ 1 ) ⎭⎪
1
Man erkennt, dass sich die Parameter der Einzelverteilungen addieren. Es
gilt der folgende
Satz:
Seien X 1 , X 2 ,..., X n n unabhängige Zufallsgrößen mit Verteilungen FX1 ,...., FX n
und Verteilungsdichten f X1 ,...., f X n , so gilt gemäß (62.1/2) für die Verteilungen
und Dichten ihrer Summen
f Z ( z ) = f X1 ∗ f X 2 ∗ .... ∗ f X n
FZ ( z ) = FX1 ∗ FX 2 ∗ .... ∗ FX n
Sind
die
Zufallsvariablen
identisch
verteilt,
so
ist
die
Verteilungsfunktion FZ ( z ) von Z, die n-te Faltungspotenz von FX ( x) . Höhere
Faltungspotenzen werden rekursiv berechnet. (Deswegen treten in obigem
Beispiel auch nur die Variablen z und x auf).
Dieses Ergebnis gilt nach wie vor nur für unabhängige Zufallsvariablen. Die
gemeinsame
Verteilung
von
n
unabhängigen,
normalverteilten
Zufallsvariablen genügt einer n-dimensionalen Normalverteilung, wobei die
Parameter von F(z) sich durch Addition der entsprechenden Parameter der
Summanden ergeben. Man spricht in diesem Zusammenhang auch von
Faltungsstabilität. Die Faltung ist eine Abbildung, deren Bilder im Falle der
Normalverteilung durch die additive Verknüpfung der Parameter erzeugt
werden.
6.3. Die Bedingte Verteilung
Eine Folge von Zufallsvariablen kann allerdings nicht nur unabhängig sein,
in welchem Fall ihre gemeinsame Verteilung durch die Faltung gegeben ist,
sondern die ZV können in beliebiger Weise voneinander abhängen. Im
Kapitel 4.3.3. „Markov-Eigenschaft“, wurde festgestellt, dass in einem
Diplomarbeit Stochastische Prozesse
64
Georg Messerle LRT 2002
6. Mehrdimensionale Normalverteilung
Prozess die ZV beispielsweise immer von ihren Vorgängern abhängen
können. Der nächste Schritt des Prozesses wird immer durch den Ort des
Partikels nach Abschluss des vorausgehenden Schrittes beeinflusst. Wir
benötigen
zur
konkreten
Verteilungsfunktion,
welche
Modellierung
die
also
Position
eine
des
gemeinsame
Partikels
zum
Vorgängerzeitpunkt berücksichtigt:
FX t ( x X s = b ) , d.h. die Wahrscheinlichkeit, im Schritt t die Position x
einzunehmen, wenn im Schritt s (s<t) die Position b erreicht wurde. Da der
Wiener-Prozess markovsch ist (→Kap. 7.4.2.), sind seine Verteilungen
prinzipiell bedingt, da ja jeder Schritt von seinem Vorgängerschritt abhängt.
Anhand
einer
zweidimensionalen
Zufallsgröße
werden
die
bedingte
Verteilung und die bedingte Dichte erläutert.
Definition:
Die Verteilungsfunktion FY ( y x ) = P (Y ≤ y X = x ) heißt bedingte Verteilung.
(Βei stetigen Verteilungen lässt sich eine alternative Erklärung angeben
(Bauer[395]):
Sei X eine ZV über (Ω,F,P) und C eine Unter-σ-Algebra von F, so heißt jede
Abbildung PX C : ( Ω, C ) → ( Ω, F ) bedingte Verteilung unter der Hypothese C.)
Nach der Definition der bedingten Wahrscheinlichkeit
P ( a b) =
P(a ) ∩ P(b)
P (b)
gilt hier analog:
x +∆x
⎞
1 ⎛
,
f
u
v
du
(
)
⎜
⎟ dv
∫
∫
P(Y ≤ y ∩ x ≤ X ≤ x + ∆x) −∞ ∆x ⎝ x
⎠
=
P ( Y ≤ y x ≤ X ≤ x + ∆x ) =
1
P( x ≤ X ≤ x + ∆x)
( FX ( x + ∆x) − FX ( x) )
∆x
y
Der Grenzübergang ∆x→0 liefert die bedingte Verteilungsfunktion von Y
unter der Bedingung X=x.
Diplomarbeit Stochastische Prozesse
65
Georg Messerle LRT 2002
6. Mehrdimensionale Normalverteilung
FY ( y x ) =
y
1
fX
( x) ∫
f ( x, v)dv =
−∞
1
fX ( x)
F ( x, y )
Bemerkung:
Der
Quotient
FX ( x) =
im
dFX
= f X ( x) .
dx
Summe schreiben:
FX ( x + ∆x) − FX ( x)
, ist
∆x → 0
∆x
Nenner
lim
die
Ableitung
von
Der Ausdruck im Zähler lässt sich als Riemannsche
1
∆x → 0 ∆x
lim
( x − xk −1 ) f ξ , v
1 n
lim k
( k )
∑
n →∞
∆x → 0 ∆x
n
k =1
x +∆x
f ( u , v ) du = lim
∫
x
∆x
Wir wählen die gröbste Zerlegung des Integrationsbereiches [ x, x + ∆x ] mit der
Feinheit δ i =
( xk − xk −1 ) = ∆x .
n
Weiterhin gilt: ξ k ∈ [ x, x + ∆x ] , woraus sich für den
Fall ∆x→0 die Bedingung ξ k = x ergibt. Der Grenzübergang ∆x→0 ergibt nun:
1
lim
∆x → 0 ∆x
x +∆x
∫ f ( u, v ) du = f ( x, v )
x
Die bedingte Dichte ist also:
fY ( y x ) =
1 ∂
f ( x, y )
F ( x, y ) =
f X ( x) ∂y
f X ( x)
(66.1)
Sind X und Y unabhängig gilt: fY ( y x) = fY ( y ) .
6.3.1. Die bedingte Verteilung der Brownschen Bewegung
Um den Gebrauch der bedingten Verteilung zu verdeutlichen betrachten wir
im
folgenden
Abschnitt
eine
Brownsche
Bewegung
{ X t , t ≥ 0} .
Die
eindimensionalen Verteilungsdichten sind für alle t gegeben durch:
Diplomarbeit Stochastische Prozesse
66
Georg Messerle LRT 2002
6. Mehrdimensionale Normalverteilung
⎧ x2 ⎫
1
ft (t ) =
exp ⎨− 2 ⎬
2π tσ
⎩ 2σ t ⎭
Man betrachtet zwei willkürlich herausgegriffene Zufallsvariable X S und X t
mit 0<s<t und berücksichtigt, dass die Zuwächse unabhängig sind, nämlich
wenn für alle n-Tupel
{t1 ,..., tn } die
Zuwächse
{ X 2 − X 1 , X 3 − X 2 ,..., X n − X n−1}
unabhängig von t sind. Mit anderen Worten: im Intervall t-s kann jeder
Zuwachs auftreten.
Die gemeinsame Verteilung von X S und X t ergibt sich so:
f s ,t ( x1 , x2 ) = p( s, 0, x1 ) p(t − s, x1 , x2 )
⎧⎪ ( x1 − x2 )2 ⎫⎪
⎧ x12 ⎫
1
1
=
exp ⎨− ⎬
exp ⎨−
⎬
2π s
⎩ 2s ⎭ 2π ( s − t )
⎪⎩ 2 ( t − s ) ⎭⎪
=
⎧ x2 ( x − x )2 ⎫
1
exp ⎨− 1 − 1 2 ⎬
2π s(t − s)
⎩ 2s 2(t − s) ⎭
Bildung des Hauptnenners im Exponenten:
HN:
2s(t-s)
f s ,t ( x1 , x2 ) =
⎧⎪
1
1
⎪⎫
x12t − 2 sx1 x2 + sx22 ) ⎬
exp ⎨−
(
2π ( s − t )
⎩⎪ 2 s ( t − s )
⎭⎪
Diese Verteilung hat die Gestalt einer zweidimensionalen Normalverteilung
mit
der
Korrelationsfunktion
ρ=
s
t
und
der
Kovarianzfunktion
K = Cov( X s , X t ) = s . (Beichelt/Montgomery [110], Bauer[26]).
Ohne Beweis haben wir hier so genannte Übergangswahrscheinlichkeiten
zugrunde gelegt. Diese werden in (Kap. 7.4.1.) abgeleitet.
Nun betrachten wir den Fall, dass X S und X t abhängig sind und zwar: 0<s<t
und X s =b.
Die bedingte Dichte von X t (unter der Bedingung X s =b) ist gemäß ihrer
Definition (66.1) wie folgt darstellbar:
Diplomarbeit Stochastische Prozesse
67
Georg Messerle LRT 2002
6. Mehrdimensionale Normalverteilung
f X t ( xt xs = b) =
f ( xs , xt )
=
f X s ( xs )
⎧⎪
1
1
⎪⎫
x12t − 2 sx1 x2 + sx22 ) ⎬
exp ⎨−
(
2π (t − s )
⎪⎩ 2 s ( t − s )
⎭⎪
f X s ( xt xs = b) =
⎧ x2 ⎫
1
exp ⎨− 1 ⎬
2π s
⎩ 2s ⎭
⎧
1
1
2⎫
exp ⎨ −
( xt − b ) ⎬
(t − s )
⎩ 2(t − s )
⎭
2π
s
Dies entspricht einer Normalverteilung mit den Parametern E ( X t X s = b ) = b
1
und Var ( X t X s = b ) = (t − s ) .
s
Wie bereits berechnet, betrachtet man nun den Übergang s→t, d.h. man
geht zu infinitesimaler Schrittweite über. Der Erwartungswert ist dabei
1
konstant b, die Varianz ( lim (t − s ) ) nimmt den Wert 0 an. Da die Markovs →t s
Eigenschaft den Prozess nur ab dem Zeitpunkt t betrachtet, zu dem X s den
Wert b angenommen hat, kommt dies einem „loslaufen“ des Prozesses bei
X s = X 0 = b gleich. Der Erwartungswert ist demnach b.
Abb. 68.1
Diplomarbeit Stochastische Prozesse
68
Georg Messerle LRT 2002
6. Mehrdimensionale Normalverteilung
Die bedingte Verteilung entartet um den Nullpunkt, wenn s gegen Null und t
gegen s strebt. Induktiv kann man diese Vorstellung auf jeden beliebigen
Zeitpunkt s und t übertragen. Die „Höhe“ der Verteilung ist dann
anschaulich ein Maß für die Kopplung im Nahbereich, d.h. für die
Aufenthaltswahrscheinlichkeit eines diffundierenden Partikels bei sehr
kleinen Zeitabschnitten (t-s).
6.3.2. Die bedingte Varianz
Ein
wichtiger
Aspekt
in
der
mathematisch
sauberen
Beschreibung
stochastischer Prozesse ist das Verhalten der Varianz für infinitesimale
Schrittweiten. Wie wir gesehen haben, impliziert die Markov-Eigenschaft eine
Abhängigkeit zwischen aufeinander folgenden Zufallsvariablen. Maßzahlen
für diese Abhängigkeiten sind Varianz und Kovarianz. Wir betrachten das
Verhalten der Varianz in Abhängigkeit von t und s:
1
Var ( X t X s = b ) = (t − s )
s
Eine Funktionsuntersuchung liefert den folgenden Verlauf:
Die Funktion ist unbeschränkt wenn s→0 geht, sie besitzt Nullstelle bei s=t
und verläuft für s>t asymptotisch zu F(s)=-1. Ein Prozess mit Varianz Null
wird
als
weißes
Rauschen
bezeichnet,
und
spielt
in
den
Ingenieurwissenschaften bei der Modellierung von zufälligen Anregungen von
Strukturen, z.B. durch Wind, eine wichtige Rolle (Waubke).
6.4. Multidimensionale Normalverteilung unabhängiger
Zufallsgrößen
Um das Problem der Abhängigkeit zu umgehen, können zwei Tricks
angewendet werden: Entweder beschränkt man sich bei der Beschreibung
eines Prozesses auf seine Inkremente, oder man definiert für stetige Prozesse
Übergangswahrscheinlichkeiten d.h. Größen die die Wahrscheinlichkeit eines
Diplomarbeit Stochastische Prozesse
69
Georg Messerle LRT 2002
6. Mehrdimensionale Normalverteilung
Überganges innerhalb eines Zeitintervalls angeben und die aktuelle Position
des
Prozesses
berücksichtigen.
In
diesem
Abschnitt
werden
die
Eigenschaften der in Kap. 4.4.4. bereits eingeführten Verteilung, im
Vergleich zur bedingten Verteilung betrachtet; eine genaue Ableitung findet
sich in Kap. 7.4.
Jede Zufallsvariable ist als Summe unabhängiger Zuwächse darstellbar. Im
Zusammenhang mit dem zentralen Grenzwertsatz folgt daraus, dass ein nwertiger Wahrscheinlichkeitsvektor einer n-dimensionalen Normalverteilung
genügt (→Kap. 7.3.1.).
Gemäß (Kap. 4.4.4.) lautet diese (Brzezniak/Zastawniak[151]):
P ( X ≤ x) = F ( x) =
∞
∞ ∞
−∞
−∞ −∞
∫ ... ∫ ∫ p ( t , 0, x ) p ( t
1
1
2
− t1 , x1 , x2 ) .... p ( tn − tn −1 , xn −1 , xn ) dx1dx2 ...dxn
(70.1)
Hierbei sind die Dichten wieder unabhängig, und die Verteilung ergibt sich
nach obiger Gleichung.
Die gemeinsame Dichtefunktion erhält man nach n-maliger Differentiation:
∂ n F ( x1...xn )
ft1 ...tn ( x1...xn ) =
∂x1∂x2 ....∂xn
ft1 ...tn ( x1...xn ) =
2
⎧⎪ 1 ⎛ x 2 ( x − x )2
xn − xn −1 ) ⎞ ⎫⎪
(
2
1
1
+ ... +
exp ⎨− ⎜ +
⎟⎬
⎜ t1
⎟
−
−
t
t
t
t
2
2
1
1
n
n
−
⎪
⎠ ⎭⎪
t1 ( t2 − t1 ) ... ( tn − tn −1 )
⎩ ⎝
1
n
( 2π ) 2
(70.2)
Man erkennt, dass es sich um die gemeinsame Dichte n-1 unabhängiger
Zuwächse
handelt.
Ist
die
Trendfunktion
konstant
0,
d.h.
der
Erwartungswert in Abhängigkeit der Zeit von Anfang an konstant, so ist der
Prozess durch seine Kovarianzfunktion vollständig charakterisiert.
Die obige Definition der Übergangswahrscheinlichkeiten ist in der Praxis der
Definition
der
bedingten
Verteilung
äquivalent.
Die
Ableitung
der
vorliegenden gemeinsamen Verteilungsfunktion geschieht anschaulich mit
Hilfe der Vorstellung des stochastischen Kerns (Ableitung: Kap. 7.4.1.). Die
Diplomarbeit Stochastische Prozesse
70
Georg Messerle LRT 2002
6. Mehrdimensionale Normalverteilung
so gewonnene Verteilungsfunktion zeigt jedoch dieselben Charakteristiken
wie die gemeinsame bedingte Verteilung.
Wir betrachten diese Verteilung nun noch einmal für ihre Anfangswerte:
Abb. 71.1
Diesmal lassen wir den Parameter t größere Werte annehmen. Wir
betrachten somit die Wahrscheinlichkeit, einer ersten Realisation des
Prozesses im Zeitabschnitt (t-0). Nimmt t große Werte an (z.B. t=10) so
flachen die Schwänze der Verteilung stark ab. Für t→∞ nähert sich die
Verteilung einer geraden Linie. Da die Norm auch im Unendlichen bestehen
bleibt, rückt das Maximum dabei beliebig nahe an den Nullpunkt heran.
Umgekehrt bedeuten „dickere Schwänze“ natürlich einen Anstieg der
Aufenthaltswahrscheinlichkeit eines Partikels, in weiter vom Nullpunkt
entfernten Regionen.
Gleich
der
bedingten
Verteilung
entartet
die
vorliegende
Verteilungsdichtefunktion um den Nullpunkt (t→0) zur Dirac-Distribution.
Diplomarbeit Stochastische Prozesse
71
Georg Messerle LRT 2002
6. Mehrdimensionale Normalverteilung
Abb. 72.1
6.4.1. Einschub: Dirac-Distribution
Bei der Dirac-Distribution (auch: δ-Distribution) handelt es sich um eine
verallgemeinerte Funktion. Der in der Literatur häufig auftretende Begriff
„Dirac-Funktion“ ist streng genommen inkorrekt, da eigentlich keine
konkrete funktionale Zuordnung (Abbildung) vorgenommen wird. Vielmehr
handelt es sich um einen Peak unendlicher Höhe und infinitesimaler Breite.
Definition:
⎧0 , x ≠ a
⎩∞ , x = a
δ ( x − a) = ⎨
Das Integral über den gesamten Bereich der reellen Zahlen der DiracDistribution ergibt den Wert 1. Aufgrund dieser Normierungsbedingung
eignet sie sich zur Beschreibung des Anfangsverhaltens der gemeinsamen
Verteilung eines stochastischen Prozesses. Darüber hinaus ist sie die
Ableitung (im Sinne der Ableitung einer Distributionen) der aus der SteuerDiplomarbeit Stochastische Prozesse
72
Georg Messerle LRT 2002
6. Mehrdimensionale Normalverteilung
und
Regelungstechnik
bekannten
Heaviside-Sprungfunktion
(dem
Einheitssprung).
6.5. Die Normalverteilung als Lösung der Diffusionsgleichung
Die Diffusionsgleichung ist wie in Abschnitt 5.3.1. gezeigt, eine partielle
Differentialgleichung zweiter Ordnung. In der Diffusionstheorie beschreibt
sie die Konzentration x der diffundierenden Substanz zur Zeit t, deren
Konzentration zum Zeitpunkt 0 einen bestimmten Wert a hatte. In der
Wärmelehre beschreibt sie die übertragene Wärmemenge als Funktion von t
und x. Bei den stochastischen Prozessen kann die Funktion p als die
Dichtefunktion
der
Übergangswahrscheinlichkeiten
aufgefasst
werden.
Einstein leitete 1905 erstmals eine Normalverteilung als Lösung dieser
Gleichung ab und definierte somit als Erster den Wiener-Prozess in seiner
heutigen Gestalt.
Die
Gleichung
wird
nun
unter
Zuhilfenahme
von
Rand-
und
Anfangsbedingungen gelöst.
6.5.1. Analytische Ableitung
Die Lösung der Diffusionsgleichung mit einer deltaartigen Anfangsverteilung
entspricht einer auseinander laufenden Normalverteilung.
∂p 1 ∂ 2 p
=
∂t 2 ∂y 2
(73.1)
Als Anfangsbedingung kommt in Frage:
p(0, x, y ) = δ ( y − x) = lim p( xt xs )
t →s
Es handelt sich hierbei um eine deltaartige Eingangsverteilung, die der
Normierungsforderung entspricht. Handelt es sich dabei um bekannte
Startwerte, so ist über die Dirac-Funktion zu integrieren, was letztlich
Diplomarbeit Stochastische Prozesse
73
Georg Messerle LRT 2002
6. Mehrdimensionale Normalverteilung
bedeutet, dass einfach der Anfangswert in der bedingten Wahrscheinlichkeit
einzusetzen ist (Waubke[40], Risken/Haken[45]).
Randbedingungen:
p (t , x, ∞ ) = p (t , x, −∞ ) = 0
d.h. die Wahrscheinlichkeit, dass der Partikel sprunghaft im Unendlichen
verschwindet ist Null. Es werden darüber hinaus folgende Voraussetzungen
gemacht:
Die partiellen Ableitungen
∂p ∂p ∂ 2 p
, ,
sind stetig in t und y, sowie nach x
∂t ∂y ∂y 2
integrierbar.
Man
betrachtet
nun
die
charakteristische
Funktion
(Methode
der
Charakteristiken (Bronstein/Semendjaev))
Φ(θ , t ) =
∞
∫e
iθ y
p(t , x, y )dy
−∞
Gleichung (73.1) mit eiθ y multipliziert, ergibt
∂p iθ y 1 ∂ 2 p iθ y
e =
e
∂t
2 ∂y 2
Und nach zweimaliger partieller Integration nach y:
∞
Linke Seite:
∂
∂
peiθ y dy = Φ
∫
∂t −∞
∂t
Rechte Seite:
⎡
⎤
∞
⎢
⎥
∞
∞
∞
1 ∂ 2 p iθ y
1 ⎢ ⎡ ∂p iθ y ⎤
1
iθ y
2 iθ y
e dy = ⎢ e ⎥ − ⎡⎣ piθ e ⎤⎦ − ∫ θ e pdy ⎥ = − θ 2Φ
2
∫
−∞
⎥
2 −∞ ∂y
2 ⎢ ⎣ ∂y
2
⎦ −∞
−∞
⎢
⎥
p ( t , x , ±∞ ) = 0
θ 2Φ
→Term = 0
⎢⎣ 0,wg .RB
⎥⎦
Also:
∂
1
Φ = − θ 2Φ
∂t
2
(74.1)
Diese Differentialgleichung kann nun durch einen Exponentialansatz gelöst
werden:
Diplomarbeit Stochastische Prozesse
74
Georg Messerle LRT 2002
6. Mehrdimensionale Normalverteilung
Φ(θ , t ) = Ae− λt
∂
Φ (θ , t ) = − Aλ e − λt
∂t
Eingesetzt in Gleichung (74.1) ergibt sich:
Φ(θ , t ) = Ae
1
− θ 2t
2
Die Konstante A kann aus der Anfangsbedingung ermittelt werden:
Φ(θ , 0) = A = eiθ x
Die Gesamtlösung lautet also:
Φ(θ , t ) = e
Die
Rücktransformation
mittels
1
iθ x − θ 2t
2
der
Inversionsformel
Transformation (Srinivasan/Mehata[9], Merziger/Wirth[360])
der
Fourierergibt die
Dichtefunktion einer Normalverteilung mit Mittelwert x und Varianz t:
⎛ 1 ( y − x )2 ⎞
1
p(t , x, y ) =
exp ⎜ −
⎟
⎜ 2
⎟
t
2π t
⎝
⎠
(75.1)
Um zu verifizieren ob das Ergebnis tatsächlich die Diffusionsgleichung löst,
differenzieren wir Gleichung (75.1) partiell nach t und y:
y 2 − 2 yx + x 2 − t
∂
p (t , x, y ) =
p(t , x, y )
2t 2
∂t
x− y
∂
p(t , x, y ) =
p (t , x, y )
t
∂y
y 2 − 2 yx + x 2 − t
∂2
(
,
,
)
=
p
t
x
y
p (t , x, y )
∂y 2
t2
Einsetzen in Gleichung (73.1) ergibt die Trivialbeziehung
1 1
= . Da im
2 2
allgemeinen Fall der Parameter σ² auf der rechten Seite steht, folgt dass σ²=1
sein
muss.
Die
Normalverteilung
ist
damit
eine
Lösung
der
Diffusionsgleichung.
Diplomarbeit Stochastische Prozesse
75
Georg Messerle LRT 2002
7. Brownsche Bewegung
7.
Brownsche Bewegung
Abb. 76.1
(Quelle: Wikipedia)
7.1
Definition und Eigenschaften
Die Brownsche Bewegung (in der Literatur auch oft als Wiener-Prozess
bezeichnet) ist ein stochastischer Prozess, der die stetige zufällige Bewegung
eines Partikels modelliert. Sie wurde von dem englischen Botaniker Robert
Brown [A4] entdeckt, der die Bewegung von Pollen in einem Wasserglas
feststellte. Die Brownsche Molekuarbewegung stellt die erste Anwendung von
Markov-Prozessen in Verbindung mit der Fokker-Planck-Gleichung dar. Sie
beschreibt den Vorgang der Diffusion in einfacher Weise. Dabei wird
angenommen, dass die einzelnen Teilchen (Moleküle) eines Gases oder einer
Flüssigkeit sich mit konstanter Geschwindigkeit bewegen, bis sie auf ein
anderes Teilchen stoßen und dabei Energie austauschen, was zu einer
Änderung des Bewegungszustandes führt. Der Wiener-Prozess, der diesen
Vorgang beschreibt besitzt als Aufenthaltswahrscheinlichkeit für jeden
Zeitpunkt eine Normalverteilung (Billingsley[498]).
Diplomarbeit Stochastische Prozesse
76
Georg Messerle LRT 2002
7. Brownsche Bewegung
Die mathematischen Grundlagen wurden 1923 von dem US-amerikanischen
Mathematiker Norbert Wiener gelegt, der erstmals die Existenz eines solchen
Prozesses nachwies.
7.1.1. Physikalische Bedeutung
Physikalisch beobachtbar ist der Prozess zum Beispiel im Falle einer
Rauchwolke
in
vollständig
ruhender
Luft.
Ausgehend
von
einer
Konzentration zum Anfangszeitpunkt wird sich die Wolke mit der Zeit über
ein sehr großes Volumen verteilen. Der Konstruktion des Wiener-Prozesses
gehen
aus
diesem
Grunde
auch
physikalische
Annahmen
voraus
(Lawler[143]). Diese Annahmen sind mathematisch rein willkürlich, stellen
aber die Anbindung des mathematischen Konstruktes an die Wirklichkeit
dar.
o
X t sei die Position eines Partikels zum Zeitpunkt t.
o
t∈
+
; Xt ∈
n
n = 1, 2,3,...
Es
handelt
sich
also
um
einen
stochastischen Prozess mit sowohl stetigem Parameterraum als auch
kontinuierlichem Zustandsraum.
o
X t =0 = 0 ; der Prozess läuft im Koordinatenursprung zum Zeitpunkt t=0
los.
o Es seien s und t (s<t) zwei vollständig beliebige Zeitpunkte: Die
Bewegung nach der Zeitspanne t-s ist unabhängig von X s . Diese
Annahme wird für jede endliche Anzahl von Zeitpunkten benötigt
werden.
o Die Verteilungen der zufälligen Bewegungen ändern sich nicht mit der
Zeit. Man kann annehmen, dass die Verteilung der ZV X t − X s nur von
der Differenz t-s abhängt.
o Es gibt keine Drift, d.h. die Trendfunktion ist konstant Null.
o Die Funktion X t ist eine stetige Funktion der Zeit.
Wiener-Prozesse
werden
heutzutage
nicht
nur
zur
Modellierung
der
Molekularbewegung herangezogen, sondern auch zur Beschreibung von
Diplomarbeit Stochastische Prozesse
77
Georg Messerle LRT 2002
7. Brownsche Bewegung
Kursschwankungen an der Börse. Eine grundlegende Arbeit hierzu stammt
von Bachelier aus dem Jahr 1900, der zum ersten Mal die Brownsche
Bewegung mit den Schwankungen des Aktienkurses in Verbindung brachte.
(Wikipedia: http://.www.wikipedia.org/index/math/brownian.motion.html)
7.1.2. Definition
Definition (1):
Ein Wiener-Prozess mit Varianz σ² ist ein stochastischer Prozess X t mit
stetigem
Zustandsraum
Z⊆
.
Für
alle
s1 < t1 < s2 < t2 ....
sind
die
Zufallsvariablen X t1 − X s1 .... unabhängig. Für jedes s<t hat die Zufallsvariable
Xt − X s
eine Normalverteilung mit Mittelwert 0 und Varianz (t-s)σ². Die
Trajektorien t→W(t) sind stetig (Brzezniak/Zastawniak[151]).
Definition (2):
Eine (eindimensionale) Brownsche Bewegung ist ein stetiger, über einem
Wahrscheinlichkeitsraum (Ω,F,P) definierter Prozess X = { X t , Ft , 0 ≤ t ≤ ∞} mit
den Eigenschaften dass X 0 = 0 ist, und für 0 ≤ s ≤ t ist das Inkrement X t − X s
normalverteilt mit Mittelwert Null und Varianz t-s, sowie unabhängig von Fs
(Martingal-Eigenschaft) ist (Karatzas/Shreve[47]).
7.2. Die „Topologie“ der Brownschen Bewegung
In diesem Abschnitt werden die Grundlagen (Kap. 3.1.ff) wiederholt, um die
Brownsche Bewegung nicht nur axiomatisch, sondern auch anschaulich
sauber zu konstruieren. Besonderes Gewicht liegt auf der Einbindung der
Filtrationen und der Einführung des Martingalbegriffes (→Definition(2)).
Zunächst betrachten wir den zugrunde liegenden Wahrscheinlichkeitsraum
noch einmal genauer:
Diplomarbeit Stochastische Prozesse
78
Georg Messerle LRT 2002
7. Brownsche Bewegung
Es handelt sich dabei um einen Messraum (Ω, F), bestehend aus einer
Trägermenge Ω (Ω topologischer Raum), versehen mit einer Borel´schen σAlgebra über welchem eine Familie von Zufallsvariablen definiert ist. Diese
Folge von Zufallsexperimenten bildet Punkte des Ereignisfeldes F in einen
zweiten Messraum (S, S), den Zustandsraum, ab. Für jeden Punkt ω aus Ω
ist die Abbildung t→X(t,ω) eine (physikalisch interpretierbare) Trajektorie des
stochastischen Prozesses (Kap. 7.6.).
Definition:
Ein Prozess
{( t , ω ) ; X
t
{ X t , t ≥ 0} heißt
messbar, wenn für jedes A ∈ B (
d
)
die Menge
∈ A} zum Produktsigmafeld von B ([0, ∞) ) ⊗ F gehört. Es gilt also:
( t , ω ) → X t (ω ) : ([0, ∞) × Ω, B ([0, ∞) ) ⊗ F ) → (
d
, B(
d
))
ist messbar. (Karatzas/Shreve[3])
7.2.1. Einschub: Das Produktsigmafeld
In Kap. 3.1. ist gezeigt worden, dass es sich bei einer Borel´schen σ-Algebra
letztlich um eine Art Topologie auf Ω handelt. Auf diese Weise ist auch das
Produkt B ([0, ∞) ) ⊗ F zu erklären:
Definition:
Seien X und Y topologische Räume. Eine Teilmenge W ⊂ X × Y heißt offen in
der Produkttopologie, wenn es zu jedem Punkt (x,y) ∈ W Umgebungen U von x
in X und V von y in Y gibt, so dass U × V ⊂ W . Mit der dadurch definierten
Topologie heißt der topologische Raum X × Y das kartesische Produkt der
Räume X und Y, welches von den Produkten U × V erzeugt wird (Jänich[14]).
Diplomarbeit Stochastische Prozesse
79
Georg Messerle LRT 2002
7. Brownsche Bewegung
Übertragen auf die Wahrscheinlichkeitstheorie bedeutet dies, dass hier eine
ähnliche Konstruktion erzeugt wird. Ein spezielles Ereignis A muss Element
einer bestimmten Teilmenge von X × Y sein, um messbar zu sein. Explizit ist
der Teilbereich W hier mit B ([0, ∞) ) ⊗ F angegeben. Es ist ein fundamentaler
Bestandteil des wahrscheinlichkeitstheoretischen Kalküls (→Kap. 3.2.), dass
die
Ereignisse
A
Elemente
des
Ereignisfeldes
F
des
Wahrscheinlichkeitsraumes (Ω, F, P) sind und so auch Umgebungen von A
in F existieren.
Gehört für alle „beobachtbaren“ Ereignisse A ∈ B (
d
)
das Paar (t,ω) zu
diesem Produktsigmafeld, ist also offen in der Produkttopologie von B ([0, ∞) )
und F, so heißt der Prozess
{ X t , t ≥ 0}
messbar. Der Begriff „messbar“ hat in
der Maßtheorie eine analoge Bedeutung wie der Begriff „offen“ in der
Topologie.
Es gibt darüber hinaus einen wichtigen anschaulichen Grund, σ-Felder bei
der Betrachtung stochastischer Prozesse mit einzubeziehen, nämlich der
„Stand der Information“. Der durch die Indizierung des Prozesses vermittelte
Zeitablauf erlaubt es, zu jedem Zeitpunkt t>0 von Vergangenheit, Gegenwart
und Zukunft eines Prozesses zu sprechen. Man kann aufgrund dessen
vergleichende Betrachtungen anstellen, wie viel ein Beobachter über den
gegenwärtigen Stand des Prozesses weiß, gegenüber dem, wie viel er zu
einem Zeitpunkt in der Vergangenheit wusste und wie viel er zu einem
beliebigen Zeitpunkt in der Zukunft wissen wird (Karatzas/Shreve[4]). Wir
versehen den Zustandsraum Z des Prozesses deswegen mit einer Filtration
(Kap. 3.1.4.) und schreiben:
F∞ =
(∪
t ≥0
Ft
)
Die einfachste Filtration ist diejenige, die von Prozess selbst generiert wird:
Ft X = σ ( X s : 0 ≤ s ≤ t )
Diplomarbeit Stochastische Prozesse
80
Georg Messerle LRT 2002
7. Brownsche Bewegung
Bemerkung:
Die angegebene Filtration wird auch kanonische Filtration oder minimale
Filtration genannt (Bauer[138]).
Mit jeder Realisation von X s steigen die Kombinationsmöglichkeiten für
Ereignisfamilien A, welche ja topologische Subbasen des erzeugten σ-Feldes
Fs sind. Wir können also beurteilen, ob sich zur Zeit t eine spezielle Familie
Ai (als „Realisationskombination“ von X s <t ) ereignet hat oder nicht.
Definition:
Ein stochastischer Prozess heißt adaptiert an die Filtration Ft , wenn für jedes
t>0, X t eine Ft -messbare Zufallsvariable ist (Karatzas/Shreve[4]).
Die Brownsche Bewegung ist nach Voraussetzung ein reellwertiger Prozess,
über einem Wahrscheinlichkeitsraum (Ω, F, P), der an eine gegebene
Filtration Ft adaptiert ist, so dass
E Xt < ∞
∀t ∈ T
gilt.
Definition:
Ein Prozess heißt Martingal, wenn für beliebige s,t ∈ T , s<t der bedingte
Erwartungswert
E ( Xt Xs ) = X s
ist.
Bemerkung:
Gilt
E ( Xt Xs ) ≤ X s
bzw.
E ( Xt Xs ) ≥ X s
so
heißt
{ X t , t ≥ 0} Super-
bzw.
Submartingal bezüglich Ft (Bauer[139]).
Charakteristisch für ein Martingal ist, dass die Zufallsvariable X t immer
unabhängig von Fs ist (→Kap. 7.4.3.). Dies ist die Folge der Adaption des
Prozesses an die Filtration. In Kap. 7.3.2. wird gezeigt, dass der
Erwartungswert für willkürlich herausgegriffene Zeitpunkte s und t (s<t)
Diplomarbeit Stochastische Prozesse
81
Georg Messerle LRT 2002
7. Brownsche Bewegung
immer
Xs
ist und damit die notwendige Bedingung der Martingal-
Eigenschaft des Wiener-Prozesses erfüllt ist.
7.3. Die Verteilungsfunktion der Brownschen Bewegung
7.3.1. Der Bezug zum zentralen Grenzwertsatz
Im Folgenden wird eine Verteilung abgeleitet, die den oben beschriebenen
Anforderungen, die an den stochastischen Prozess gestellt werden, genügt.
Ein erster, leicht einprägsamer Ansatz lässt sich über die Zerlegung einer
beliebigen Zufallsvariablen in die Summe von n unabhängigen Zuwächsen
erzielen: zum Beispiel kann eine ZV
X 1 als Summe n unabhängiger
Zuwächse dargestellt werden:
⎡
⎤ ⎡
⎤
⎡
⎤
X 1 = ⎢ X 1 − X 0 ⎥ + ⎢ X 2 − X 1 ⎥ + ... + ⎢ X n − X n −1 ⎥
n⎦
n ⎦
⎣ n
⎦ ⎣ n
⎣ n
Die einzige Verteilung, die als Summe n unabhängiger, identisch verteilter
Zufallsgrößen geschrieben werden kann, ist die Normalverteilung (Marti[60]).
Wenn die Irrfahrt eines Systems von einer Vielzahl unterschiedlicher,
unabhängiger Ursachen herrührt, besagt der zentrale Grenzwertsatz, dass
das „Nettoresultat“ normalverteilt sein wird und mit zunehmender Anzahl
(der Einflüsse) gegen die Standardnormalverteilung N(0,1) konvergiert. Die
Zufallsvariablen X i der Brownschen Bewegung sind daher normalverteilt. Da
die Brownsche Bewegung nach Voraussetzung ein zeitstetiger Prozess ist,
werden die Dichten der Zufallsvariablen wie bei den Markov´schen Ketten
mit stetiger Zeit, durch Übergangsdichten ausgedrückt.
Man definiert die
Verteilungsfunktion einer Brownschen Bewegung daher so:
Diplomarbeit Stochastische Prozesse
82
Georg Messerle LRT 2002
7. Brownsche Bewegung
Definition (Verteilung der Brownschen Bewegung):
Für eine endliche Folge von Zeitpunkten 0 < t1 < t2 < ... < tn und Borel´schen
Mengen A1 ,...., A2 ⊂
gilt:
{
}
P X t1 ∈ A1 ,...., X tn ∈ An = ∫ ... ∫ p(t1 , 0, x1 ) p(t2 − t1 , x1 , x2 ).... p(tn − tn −1 , xn −1 , xn )dx1...dxn
A1
An
−
1
e
Dabei sind die Übergangsdichten p (t , x, y ) =
2π t
( x − y )2
2t
.
Der Ausdruck p (t2 − t1 , x1 , x2 ) beispielsweise bezeichnet dabei die Dichte der
Wahrscheinlichkeit des Überganges von einem Zustand x1 in einem Zustand
x2 im Zeitabschnitt ∆t = t2 − t1 (Karlin [273]).
Es
wird
im
folgenden
Dichtefunktion von Wt
gezeigt,
dass
−
1
f ( x) =
e
2π t
( x )2
2t
tatsächlich
die
ist und wie Erwartungswert und Varianz der
gemeinsamen Verteilungsfunktion der Brownschen Bewegung aussehen.
7.3.2. Erwartungswert
Die obige Begriffsbestimmung besagt, dass sich die gemeinsame Verteilung
des zufälligen Vektors ( Wt1 ,..., Wtn ) durch das n-fach Integral über das Produkt
der Übergangsdichten berechnet.
Wenn
−
1
f ( x) =
e
2π t
( x )2
2t
eine Dichte der Verteilung sein soll, so kann es sich nur um
f ( x) = p (t1 , 0, x1 )
handeln.
Wir berechnen nun für diese Dichte den Erwartungswert (da die Integration
leicht fällt) und schließen dann induktiv auf die restlichen Übergänge
(Brzezniak/Zastawniak[152]). Der Erwartungswert ergibt sich wie folgt:
Diplomarbeit Stochastische Prozesse
83
Georg Messerle LRT 2002
7. Brownsche Bewegung
∞
1
E (Wt ) = ∫ xp(t , 0, x)dx =
2π t
−∞
∞
∫ xe
−
x2
2t
dx
−∞
Da gilt:
2
2
d − x2t
x − x2t
e =− e
dx
t
2
→
2
x
−
d − x2t
− t e = xe 2t und
dx
1
E (Wt ) = −
2π t
d
∫ dx adx = a
ergibt sich:
∞
x
⎡
− ⎤
d − x2t
t
2t
=
−
e
dx
e
⎢
⎥ =0
∫−∞ dx
π
2
t
⎣⎢
⎦⎥ −∞
2
∞
2
Der Erwartungswert ist für alle Zeitpunkte t gleich Null, d.h. die
Trendfunktion ist konstant Null und der Prozess bewegt sich im Mittel an
der x-Achse entlang.
7.3.3. Varianz
Analog zum Erwartungswert berechnet sich die Varianz:
∞
1
Var (Wt ) = ∫ x p(t , 0, x)dx =
2π t
−∞
2
1
=
2π t
∞
∫ x ⋅ xe
−
x2
2t
−∞
∞
∫xe
2
−
x2
2t
dx
−∞
t
dx = −
2π t
2
∞
d − x2t
∫ x dxe dx
−∞
Durch partielle Integration gewinnt man:
2
Mit: v = x
→
dv
= 1 und
dx
t
−
2π t
∞
du d − x2t
= e
dx dx
→ u=e
2
2
x
−
d − x2t
t
2t
x
e
dx
=
−
xe
∫−∞ dx
2π t
1.
Diplomarbeit Stochastische Prozesse
84
−
x2
2t
∞
t
+
2π t
−∞
∞
∫e
−
x2
2t
dx
−∞
2.
Georg Messerle LRT 2002
7. Brownsche Bewegung
Der erste Teil (1.) wird bezüglich seines Verhaltens gegen +∞ und -∞
untersucht:
2
x
−
t
xe 2t
−
2π
2
∞
2
x
−
t
xe 2t
+
2π
−∞
2
x
x
−
−
t
t
2t
=−
lim xe +
lim xe 2t = ?
2π x →∞
2π x →∞
Aufgrund des Quadrates im Exponenten und des negativen Vorzeichens des
ersten Summanden ergibt sich die Summe, unabhängig von x, zu Null. Doch
auch wenn x→∞ geht kann gezeigt werden, dass der Grenzwert existiert und
Null ist:
x
⎛ t
−
lim ⎜
xe 2t
x →∞ ⎜
⎝ 2π
2
⎡∞⎤
⎡1⎤
⎢ ⎥
⎢ ⎥
⎞ [0 ∞] t
x ⎣∞⎦ t
1 ⎣∞ ⎦
lim x2 =
lim
=0
⎟ =
x2
⎟
x →∞
x →∞
2
2
π
π
x
⎠
e 2t
e 2t
t
Der erste Teil des Integrals ist also Null.
Der zweite Teil (2.) kann durch die Substitution u =
x
und dx = tdu auf die
t
Form
t
2π t
∞
∫e
−∞
−
x2
2t
∞
2
u
−
t
dx =
t ∫ e 2 du
2π −∞
gebracht werden.
Der Wert des Integrals ist 2π (Merziger/Wirth[290]) und somit verbleibt für
die Varianz:
2
∞
u
−
t
t ∫ e 2 du = t
2π −∞
Var (Wt ) = 0 + t = t
Alle Wt haben also eine Normalverteilung mit Mittelwert 0 und Varianz t.
Wir greifen nun zwei beliebige, aufeinander folgende Zufallsvariablen heraus
und
betrachten
die
gemeinsame
Diplomarbeit Stochastische Prozesse
Varianz,
85
den
Mittelwert
und
die
Georg Messerle LRT 2002
7. Brownsche Bewegung
Dichtefunktion. Es sei nun s<t und wir betrachten die Zufallsvariablen Wt
und Ws . Die gemeinsame Dichte ist nach Definition
fWt ,Ws = p ( s, 0, x ) p (t − s, x, y )
Der Erwartungswert ist:
E (Wt ,Ws ) =
∞ ∞
∫∫
⎛∞
⎞
xp
(
s
,
0,
x
)
⎜ ∫ yp(t − s, x, y )dy ⎟
∫−∞
⎝ −∞
⎠
∞
xy ⋅ p ( s, 0, x) p (t − s, x, y )dxdy =
−∞ −∞
x
∞
=
∫x
2
p ( s, 0, x)dx = Var (Ws ) = s
−∞
Das bedeutet, dass der Erwartungswert zweier um t-s auseinander liegender
Zufallsgrößen die Varianz der Zufallsgröße zum Zeitpunkt s ist. Dies ist eine
Konsequenz der Markov-Eigenschaft. Zu jedem Zeitpunkt s hängt der
Übergang nach t nur von s ab: wie gezeigt worden ist, kann man sich
vorstellen, dass der Prozess zu jedem Zeitpunkt s an einem Punkt x(s)
startet.
Für beliebige {s, t : s < t} gilt:
E (Wt , Ws ) = min {s, t} für beliebige s,t.
7.3.4. Die Inkremente des Wiener-Prozesses
Unter
den
Inkrementen
eines
Wiener-Prozesses
versteht
man
die
Zufallsvariablen X t − X S (s<t), also die Zuwächse, die der Prozess in der
Zeitspanne t-s erfährt (Kap. 4.3.2.).
Die Inkremente sind ebenfalls normalverteilt mit Mittelwert 0 und Varianz
t-s.
Beweis:
Var ( X t − X S ) = E ( X t − X S ) = E ( X t 2 ) − 2 E ( X t X s ) + E ( X s 2 )
2
= t − 2s + s = t − s
Diplomarbeit Stochastische Prozesse
86
Georg Messerle LRT 2002
7. Brownsche Bewegung
Die Inkremente sind darüber hinaus unabhängig. Dies folgt aus der
Tatsache, dass die Inkremente normalverteilt sind. Sie sind deswegen genau
dann unabhängig, wenn sie unkorelliert sind, d.h. gilt:
Cov ( X t − X S , X n − X r ) = 0
Es sei 0<r<n<s<t.
Mit
Cov ( X i , X j ) = E ( X i , X j ) − E ( X i ) E ( X j )
gilt:
Cov ( X t − X S , X n − X r ) = E ( ( X n − X r )( X t − X s ) ) − E ( X n − X r ) E ( X t − X s )
0
0
= −E ( X n X s ) − E ( X r X t ) + E ( X n X t ) + E ( X r X s )
= −n − r + n + r
=0
Die Inkremente sind also tatsächlich unabhängig. Folglich kann die
gemeinsame Verteilung eines n-wertigen Zufallsvektors bei Betrachtung der
Inkremente sehr leicht als Produkt der Übergangsdichten geschrieben
werden (siehe Kap. 7.3./7.4.).
7.4. Darstellung als Markov- bzw. Gauß-Prozess
Wie bereits eingeführt, gilt für den Wiener-Prozess die Markov-Eigenschaft.
Wie später gezeigt werden wird, gilt sogar die so genannte starke MarkovEigenschaft. Zunächst soll jedoch noch einmal in allgemeiner Form diese
Charakteristik erläutert, und die Brownsche Bewegung somit formal den
Markov-Prozessen zugeordnet werden.
Es
wird
darüber
hinaus
nun
auch
rein
formal
der
Begriff
der
Übergangswahrscheinlichkeiten abgeleitet. Bisher hatten wir diesen Begriff
als anschauliches Vehikel aus der Vorstellung Markov´scher Ketten
übernommen.
Diplomarbeit Stochastische Prozesse
87
Georg Messerle LRT 2002
7. Brownsche Bewegung
Um dies zu zeigen, wird der Begriff des stochastischen Kerns eingeführt
(Bauer[311], Jänich[8], Plachky[75]).
Wir
betrachten
:B(
)→[0,1]
zunächst
ein
beliebiges
Wahrscheinlichkeitsmaß
über der Borel´schen σ-Algebra des Wahrscheinlichkeitsraumes, sowie einen
stochastischen Kern
P:[0, ∞)×
)→[0,1].
× B(
7.4.1. Einschub: stochastischer Kern
Der Begriff des Kerns in der Topologie umfasst einfach die Menge aller
inneren Punkte x einer Topologie T, für die offene Umgebungen existieren,
also Teilmengen B ⊂ X, X ∈ T. Man gelangt zum Begriff des Kerns auch wenn
man
nach
der
Wahrscheinlichkeit
P(x,B)
fragt,
also
danach,
wie
wahrscheinlich es ist, ein auf (Z,B) irrfahrendes Teilchen zu einem Zeitpunkt
t>0 in einer Menge B zu finden, wenn es sich zuvor am Ort x befand. Für
jedes Element x des Zustandsraumes ist dann eine Abbildung B→P(x,B) ein
Wahrscheinlichkeitsmaß auf der σ-Algebra. Außerdem ist die Abbildung
x→P(x,B)
bei
feststehender
Menge
B
borel-meßbar.
Für
eine
phänomenologische Annäherung reicht es, sich den stochastischen Kern als
Abbildung
aus
Zustandsraum
dem
und
kartesischen
σ-Algebra
in
Produkt
das
von
Parameterraum,
abgeschlossene
Intervall
[0,1]
vorzustellen (genaue Herleitung: Bauer[311]).
Der Kern muss weiterhin folgende Eigenschaften besitzen:
P(0,x, { x} ) = 1
P(t1 + t2 , x, B) = ∫ P(t2 , y, B) P(t1 , x, dy )
für beliebige t>0.
Ein
solcher
Kern
wird
auch
Übergangskern
genannt
(Schmidt[23],
Plachky[76]).
Diplomarbeit Stochastische Prozesse
88
Georg Messerle LRT 2002
7. Brownsche Bewegung
Definition:
Ein stochastischer Prozess mit Werten in Z=R heißt homogener MarkovProzess (siehe Kap. Eigenschaften stochastischer Prozesse), wenn es einen
Übergangskern und ein Wahrscheinlichkeitsmaß gibt, so dass
{
}
P X t0 ∈ B0 , X t1 ∈ B1 ,...., X tn ∈ Bn = ∫ ... ∫ P (tn − tn −1 , xn −1 , dxn )...P (t2 − t1 , x1 , dx2 ) P (t1 , x0 , dx1 )α ( dx0 )
B0
Bn
(89.1)
wobei die Anfangsverteilung genannt wird (vgl. Markov´sche Ketten, Kap.
4.4.1.). P(h,x,B) wird als die Wahrscheinlichkeit interpretiert, dass der
Prozess in h Zeiteinheiten vom Zustand x in einen Zustand aus B übergeht.
Man kann nun beweisen, dass ein Wiener-Prozess mit der Verteilung
⎧⎪ ( y − x )2 ⎫⎪
1
exp ⎨−
P(t , x, B) =
⎬
2t ⎭⎪
2π t ∫B
⎪⎩
(89.2.)
ein Markov-Prozess ist. Gleichzeitig lässt sich bei dieser Ableitung auf die (in
Kap 6.4. schon abgeleitete) gemeinsame Dichtefunktion schließen. Die
Beweisidee beruht darauf, zu zeigen, dass aufgrund der Unabhängigkeit und
Normalverteiltheit der Zuwächse (siehe Kap. 7.6.) Gleichung (89.1.) für den
Wiener-Prozess erfüllt ist (Schmidt[24ff]):
Aufgrund der Voraussetzung X(0)=0 ist es ausreichend zu zeigen, dass
anstelle von (89.1.) die folgende Desintegrationsgleichung erfüllt ist:
{
}
P X t1 ∈ B1 ,...., X tn ∈ Bn = ∫ ... ∫ P(tn − tn −1 , xn −1 , dxn )...P(t2 − t1 , x1 , dx2 ) P(t1 , 0, dx1 )
B1
Bn
(Die Voraussetzung bewirkt eine Indexverschiebung, da α ( dx0 ) = 1 ist und die
Integration somit zuerst alle Zustände x1 erfassen muss.)
Aus der Unabhängigkeit der Zuwächse des Wiener-Prozesses ergibt sich
Diplomarbeit Stochastische Prozesse
89
Georg Messerle LRT 2002
7. Brownsche Bewegung
{
P X t1 ∈ B1 ,...., X tn ∈ Bn
}
{
= P X t1 ∈ B1 , X t2 − X t1 ∈ B2 − X t1 ,..., X tn − X t1 ∈ Bn − X t1
{
}
}{
= ∫ P X t2 − X t1 ∈ B2 − xt1 ,..., X tn − X t1 ∈ Bn − xt1 P X t1 ∈ dx1
}
B1
=
∫ ∫ P{X
t3
∫ ∫
∫
B1 B2 − x1
}{
} {
− X t2 ∈ B3 − xt1 − xt2 ,..., X tn − X t2 ∈ Bn − xt1 − xt2 P X t2 − X t1 ∈ dx2 P X t1 ∈ dx1
}
.
.
.
.
.
=
...
B1 B2 − x1
Bn − x1 ... xn−1
{
} {
} {
P X tn − X tn−1 ∈ dxn ...P X t2 − X t1 ∈ dx2 P X t1 ∈ dx1
}
Somit lässt sich schreiben:
{
P X t1 ∈ B1 ,...., X tn ∈ Bn
=
∫ ∫
...
∫ ∫
...
B1 B2 − x1
=
∫
⎛
⎞
⎛
⎞
⎛ x2 ⎞
xn2
x22
1
1
exp ⎜⎜ −
exp ⎜⎜ −
exp ⎜ − 1 ⎟ dx1
⎟⎟dxn ....
⎟⎟ dx2
2π t1
2π ( tn − tn −1 )
2π ( t2 − t1 )
⎝ 2t1 ⎠
⎝ 2 ( tn − tn −1 ) ⎠
⎝ 2 ( t2 − t1 ) ⎠
∫
⎛ ( x − x )2 ⎞
⎛ ( x − x )2 ⎞
⎛ x2 ⎞
1
1
exp ⎜ − 2 1 ⎟ dx2
exp ⎜ − 1 ⎟ dx1
exp ⎜ − n n −1 ⎟dxn ....
⎜ 2 ( t2 − t1 ) ⎟
⎜
⎟
2π t1
2π ( t2 − t1 )
2π ( tn − tn −1 )
⎝ 2t1 ⎠
⎝
⎠
⎝ 2 ( tn − tn −1 ) ⎠
Bn − x1 −...− xn−1
Bn − x1 −...− xn−1
B1 B2 − x1
Damit
}
ist
1
1
die
Gültigkeit
von
Gleichung
(89.1.)
gezeigt,
wobei
der
Übergangskern des Wiener-Prozesses durch Gleichung (78.2.) gegeben ist.
Es ergibt sich, dass der Vektor eine multivariate Normalverteilung besitzt
deren Dichtefunktion durch Gleichung (69.1) Kap.6.4. gegeben ist.
Ein
Prozess,
dessen
endlichdimensionale
Verteilungen
multivariate
Normalverteilungen sind, heißt Gauß-Prozess.
Diplomarbeit Stochastische Prozesse
90
Georg Messerle LRT 2002
7. Brownsche Bewegung
7.4.2. Die Markov-Eigenschaft
Sei X t ein Standard-Wiener-Prozess. Fs sei die Information, die in X s (s<t)
enthalten ist, sprich die Informationsmenge, die man durch Beobachtung
des Prozesses bis zum Zeitpunkt s erhalten könnte. Fs ist also die Filtration
von F. Der Erwartungswert von X t ist dann:
E ( X t Fs ) = E ( X s Fs ) + E ( X t − X s Fs )
Weil X s Fs -messbar sein muss, ist der Erwartungswert E ( X t Fs ) = X s . Der
Zuwachs X t − X s ist dagegen unabhängig von Fs , d.h. E ( X t − X s Fs ) = 0 .
Daher gilt
E ( X t Fs ) = X s = E ( X t X s ) .
Die Gleichung besagt, dass X t ein Prozess unabhängig von X s ist. Mit
anderen Worten ist X t ein Prozess, der zur Zeit t0 = s am zufälligen Punkt
X s losläuft (Karlin[230], Lawler[72]), Karatzas/Shreve[79])).
7.4.3. Die Starke Markov-Eigenschaft
Für viele computerbasierte Anwendungen im Zusammenhang mit der
Brownschen Bewegung, wird eine strengere, allgemeine Formulierung der
Markov-Eigenschaft benötigt. Zunächst benötigt man jedoch die Definition
des Begriffes einer reellwertigen Stoppzeit.
7.4.3.1. Einschub: Stoppzeiten
Wir betrachten einen stochastischen Prozess { X n ; n ≥ 1} . Die Zufallsvariable
L (ω ) = inf {n : X n (ω ) = a}
heißt Stoppzeit.
Diplomarbeit Stochastische Prozesse
91
Georg Messerle LRT 2002
7. Brownsche Bewegung
Eine Zufallsvariable dieser Art, die Werte in1, 2,…n annimmt, heißt
Stoppzeit relativ zu
{Fn , n ≥ 1} ,
wobei Fn eine Folge von Teilmengen des σ-
Feldes von (Ω,F,P) ist, so dass gilt F1 ⊂ F2 ⊂ ... ⊂ Fn . Die Stoppzeit bezieht sich
also auf die aktuelle Filtration.
1
1
2
3
4
t
-1
L(ω)
Abb. 92.1
Sie beschreibt die Wahrscheinlichkeit des Erreichens des Punktes a.
{ X n ; n ≥ 1}
Beispielsweise kann sie, falls
Erreichen des ersten Gewinns beschreiben:
ein Bernoulli-Prozess ist, das
L (ω ) = inf {n : X n (ω ) = 1} . In Abb.
92.1 erreicht ein Spieler beim Dritten Wurf einer Münze erstmals ein
positives Ergebnis.
Da sich die Stoppzeit immer auf die aktuelle Filtration bezieht, ist das
Ereignis
{L ≤ t} stets
Ft -messbar. Das bedeutet, um herauszufinden, ob ein
Prozess vor einem Zeitpunkt t angehalten hat oder nicht, muss man sich den
Prozess bis zum Zeitpunkt t ansehen. Ist L(ω) eine Stoppzeit, so ist Ft die bis
zum Zeitpunkt t enthaltene Information (Lawler[24]).
Wir betrachten nun einen Prozess
Yt = X t + L − X L
Anschaulicherweise handelt es sich hierbei um den Prozess „hinter“ der
Stoppzeit.
Dann besagt die strenge Markov-Eigenschaft, dass Y unabhängig von Ft ist.
Diplomarbeit Stochastische Prozesse
92
Georg Messerle LRT 2002
7. Brownsche Bewegung
7.5. Mehrdimensionale Stochastische Prozesse
Abb. 93.1
(Quelle: Wikipedia)
Bisher haben wir stochastische Prozesse nur in einer Dimension betrachtet
und als Zustandsraum die Menge der positiven reellen Zahlen zugrunde
{
}
gelegt. Wir betrachteten nun einen zufälligen n-wertigen Vektor X t1 ,... X tn ,
bestehend aus Zufallsvariablen X i , welche jede für sich genommen in nur
einer Dimension realisieren.
7.5.1. Verallgemeinerung auf n Dimensionen
Erweitern wir die Vorstellung auf n Dimensionen, so realisiert die
Zufallsvariable nun pro Zeitschritt in n-1 weiteren Raumpunkten, sprich
Dimensionen.
∼
⎧ ∼( n ) ∼( n )
⎫
X t = ⎨ X 1 , X 2 ,..., X n( n ) ⎬
⎩
⎭
∼
wobei nun jede ZV die Form
X
∼
(n)
i
∼
⎧ ∼(1) ∼(2)
⎫
= ⎨ X i , X i ,..., X i( n ) ⎬
⎩
⎭
besitzt.
Diplomarbeit Stochastische Prozesse
93
Georg Messerle LRT 2002
7. Brownsche Bewegung
Der Prozess ist somit darstellbar als:
⎧⎛ X 11 ⎞ ⎛ X 21 ⎞
⎛ X n1 ⎞ ⎫
⎪⎜ 2 ⎟ ⎜ 2 ⎟
⎜ 2 ⎟⎪
⎪⎜ X 1 ⎟ ⎜ X 2 ⎟
⎜ X n ⎟⎪
⎪⎪⎜ . ⎟ ⎜ . ⎟
⎜ . ⎟ ⎪⎪
∼
⎟,⎜
⎟⎬
X t = ⎨⎜
⎟ ,..., ⎜
⎜ . ⎟⎪
⎪⎜ . ⎟ ⎜ . ⎟
⎜ . ⎟⎪
⎪⎜ . ⎟ ⎜ . ⎟
⎜
⎟⎪
⎪⎜⎜ n ⎟⎟ ⎜⎜ n ⎟⎟
n⎟
⎜
X
X
X
⎝ n ⎠ ⎭⎪
⎩⎪⎝ 1 ⎠ ⎝ 2 ⎠
Beispiel:
Random-Walk auf dem
3
:
Ausgehend vom Koordinatenursprung führt ein Läufer eine dreidimensionale
Bewegung aus. Er macht dabei in den einzelnen Raumrichtungen jeweils
nur einen Schritt nach vorne oder einen Schritt zurück. Es gilt:
⎧ −1
X X (t ) = X Y (t ) = X Z (t ) = ⎨
⎩ +1
jeweils mit Wahrscheinlichkeit ½.
Die Position des Partikels nach t Schritten ist dann:
⎛ X X1 + ... + X X t
⎜
X t = ⎜ X Y1 + ... + X Yt
⎜⎜
⎝ X Z1 + ... + X Zt
∼
⎞
⎟
⎟
⎟⎟
⎠
Man erkennt, dass jede Komponente aus unabhängigen Zufallsvariablen
besteht und jeweils einen, von den Anderen unabhängigen Random-Walk
ausführt.
∼
Xt
kann deshalb auch als „Zusammenfassung“ dreier unabhängiger
Irrfahrten aufgefasst werden. Für die Konstruktion eines dreidimensionalen
Wiener-Prozesses bedeutet dies, dass 3 unabhängige Wiener-Prozesse dem
dreidimensionalen Wiener-Prozess zugrunde liegen.
Diplomarbeit Stochastische Prozesse
94
Georg Messerle LRT 2002
7. Brownsche Bewegung
7.5.2. Interpretation als Markov´sche Kette
Beginnend im Ursprung macht die Kette wiederum entweder einen Schritt
+1 oder -1 in jeder Dimension.
In jedem Punkt i hat die Kette dann 8 Möglichkeiten weiterzulaufen, da in
einem diskreten Gitter bei Ausführung je eines Schrittes in jeder Dimension,
jeder Punkt i 24 direkte Nachbarpunkte besitzt. Da die (auch teilweise)
Stagnation der Kette ausgeschlossen ist, sind die möglichen Zustände die
Eckpunkte eines Würfels mit Kantenlänge 2 und Mittelpunkt i. Die
Indizierung
der
Zustände
in
der
Matrix
erfolgt
ebenenweise
im
Uhrzeigersinn, beginnend jeweils mit einem Nicht-Eckpunkt.
Die Matrix der (Einstufigen-) Übergangswahrscheinlichkeiten ist:
P (1)
⎡
⎢0
⎢
= pij = ⎢0
⎢
⎢0
⎣
1
1
1
1⎤
0
0
0
8
8
8
8⎥
⎥
0 0 0 0 0 0 0⎥
1
1
1
1⎥
0
0
0
⎥
8
8
8
8⎦
Die Übergangswahrscheinlichkeit zu den möglichen Zuständen ist
3
⎛1⎞ 1
pij = ⎜ ⎟ =
⎝2⎠ 8
Bemerkung:
Im geometrischen Wahrscheinlichkeitsraum ⎡⎣( 0,1) ⎤⎦
3
ist pij der Wert des
dreidimensionalen Lebesgue-Maßes.
Diplomarbeit Stochastische Prozesse
95
Georg Messerle LRT 2002
7. Brownsche Bewegung
7.5.3. Brownsche Bewegung in mehreren Dimensionen
Definition:
Der vektorwertige stochastische Prozess X t = ( X t1 ,..., X td ) heißt d-dimensionale
Brownsche Bewegung (Lawler[153]).
X t erfüllt die Bedingungen der Brownschen Bewegung (siehe Kap. 7.1.). Da
die Komponenten unabhängig sind, gilt für die gemeinsame Dichtefunktion:
1
d
f ( x1 ,..., xd ) = ∏
i =1
( 2π t )
i
2
e
−
xi
2
=
2t
1
( 2π t )
d
2
e
−
x
2
2t
2
Dabei ist x = x12 + x22 + ... + xd2 .
Wir greifen nun wieder zwei beliebige Zeitpunkte s und t (s<t) heraus, und
betrachten die gemeinsame Dichtefunktion eines Überganges x(s)→y(t). Nach
Gleichung (70.1, Kap. 6.4.) gilt:
ps , t ( x, y ) =
1
( 2π ( t − s ) )
d
2
⎧⎪ y − x 2 ⎫⎪
exp ⎨−
⎬ mit x,y ∈
⎪⎩ 2 ( t − s ) ⎭⎪
d
Ausgehend von dieser Gleichung, lässt sich durch Anwendung der
Gleichung
von
Chapman-Kolmogoroff
in
Integralform
eine
Diffusionsgleichung analog zu Kap. 4.3.2. herleiten.
7.5.3.1. Diffusionsgleichung für eine mehrdimensionale Bewegung
Gleichung (55.1) kann leicht auf d Dimensionen erweitert werden, wenn für
∂2
der d-dimensionale Laplace-Operator eingeführt wird:
∂x 2
d
∆f ( t ; x1...xd ) = ∑
i =1
Diplomarbeit Stochastische Prozesse
96
∂2 f
∂xi 2
Georg Messerle LRT 2002
7. Brownsche Bewegung
Es ergibt sich:
∂f 1
= ∆f ( t ; x1...xd ) .
∂t 2
7.5.4. Beispiel: 2-dimensionaler Wiener-Prozess
Es sei:
⎛ X t1 ⎞
Xt = ⎜ 2 ⎟
⎝ Xt ⎠
Gesucht:
die Wahrscheinlichkeit, dass X t < R ; wobei R>0 ist, und
ein Wiener-Prozess.
x = ( x1 ) + ( x2 ) die euklidische Norm auf dem R² ist.
2
2
2
Da X t1 und X t 2 unabhängig sind, ist ihre gemeinsame Dichte nach (69.1)
das Produkt ihrer Einzeldichten.
Es gilt:
P { X t < R} =
∫
p (t , 0, x) p(t , 0, y )dxdy
{ x < R}
mit
1
p(t , 0, x) p (t , 0, y ) =
2π t
2
2
x
y
−
−
1
1 −
2t
e e 2t =
e
2π t
2π t
(x
2
+ y2
)
2t
ergibt sich:
−
1
P { X t < R} =
e
2π t { x ∫< R}
Das
Integral
löst
man
durch
eine
(x
2
+ y2
2t
)
dxdy
Koordinatentransformation
zu
Polarkoordinaten:
Mit
(x
2
+ y2 ) = r 2
dxdy = rdrdϕ
schreibt sich das Integral folgendermaßen:
Diplomarbeit Stochastische Prozesse
97
Georg Messerle LRT 2002
7. Brownsche Bewegung
R 2π
1
P{ Xt < R } =
2π t ∫0
∫ re
2
= −e
−
2
r
2t
−
r2
2t
0
R
= −e
−
2
R
1
d −r
dϕ dr = −
2π t ∫ e 2t dr
2π t
dr
0
r2
2t
− ( −1)
0
= 1− e
R2
−
2t
Analog konstruiert man den 3-dimensionalen Fall (Kugelkoordinaten).
7.6. Stetigkeit der Trajektorien
7.6.1. Stetigkeit im Quadratmittel
Physikalisch gesehen, ist die Stetigkeit der Pfade eines Partikels zu jedem
Zeitpunkt
gegeben.
Bildhaft
kann
die
Trajektorie
als
Zeitreihe
aus
„unendlich“ dichten Sprüngen interpretiert werden (Waubke[42]).
Da der direkte Beweis der Stetigkeit sehr schwierig ist, zeigt man
ersatzweise, dass ein Prozess im Quadratmittel stetig ist.
Definition:
Ein stochastischer Prozess heißt stetig im Quadratmittel, wenn gilt:
2
lim E X t − X t0 = 0
t →t0
Es muss also bezüglich der L²-Norm X t → X t0 wenn t → t0 geht (Karlin[277]).
Wenn diese Bedingung überall im Intervall (a,b) ⊂ T gilt, ist X t überall auf
(a,b) stetig im Quadratmittel. Diese Bedingung weist auf die Struktur der
Kovarianzfunktion des Prozesses hin. Die Stetigkeit der Kovarianzfunktion
hat direkten Einfluss auf die Stetigkeit des Prozesses im Quadratmittel.
Diplomarbeit Stochastische Prozesse
98
Georg Messerle LRT 2002
7. Brownsche Bewegung
Satz:
Ein stochastischer Prozess ist dann und nur dann im Quadratmittel stetig,
wenn
die
Kovarianzfunktion
K(s,t)
im
Punkt
( t0 , t0 )
stetig
ist
(Srinivasan/Mehata[256]).
Beweis:
Wenn K(s,t) bei ( t0 , t0 ) stetig ist, dann gilt auch:
lim ( K ( t0 + k , t0 + h ) − K ( t0 , t0 ) ) = 0
h , k →0
Es gilt nun:
(
2
E X t0 + h − X t0 = E X t0 + h − X t0
)( X
t0 + h
− X t0
)
Mit
K ( s, t ) = E
(( X
s
− E ( X s )) ( X t − E ( X t ))
)
2
folgt für E X t0 + h − X t0 :
K ( t0 + h, t0 + h ) − K ( t0 + h, t0 ) − K ( t0 , t0 + h ) + K ( t0 , t0 )
= ⎡⎣ K ( t0 + h, t0 + h ) − K ( t0 , t0 ) ⎤⎦ − ⎡⎣ K ( t0 , t0 + h ) − K ( t0 , t0 ) ⎤⎦ − ⎡⎣ K ( t0 , t0 + h ) − K ( t0 , t0 ) ⎤⎦
0
0
0
Bilden wir nun den Limes h→0, so wird der gesamte obere Ausdruck Null
und somit der Prozess im Quadratmittel stetig. Andererseits sind die
Trajektorien nirgends differenzierbar. Es sei an dieser Stelle nur eine
Plausibilitätsbetrachtung gegeben:
Für eine beliebige Trajektorie ist die Differenz X(t+h)-X(t) durchschnittlich
von der Größenordnung ihrer Standartabweichung also
h . Bildet man nun
die Ableitung, sprich den Limes
X (t + h ) − X (t )
∂x(t )
h
= lim
= lim
=∞
h
→
0
h
→
0
∂t
h
h
Diplomarbeit Stochastische Prozesse
99
Georg Messerle LRT 2002
7. Brownsche Bewegung
so zeigt sich, dass diese nicht existiert. Die Trajektorien sind also nirgends
differenzierbar.
7.6.2. Topologisches Analogon
Da der vollständige Beweis der Stetigkeit der Trajektorien sehr schwierig ist
und somit den Rahmen der Arbeit sprengen würde, sei hier, um doch noch
eine vertiefende Betrachtungsweise mit einfließen zu lassen, eine weitere
Betrachtungsmöglichkeit gegeben [A8].
Definition:
Seien X und Y topologische Räume. Eine Abbildung f:X→Y heißt stetig, wenn
die Urbilder offener Mengen stets wieder offen sind (Jänich[16]).
Eine Trajektorie eines stochastischen Prozesses ist eine Abbildung
ξ :Ω → Z
wobei für jedes ω ∈ Ω gilt:
T ∋ t → ξ (t, ω )
(Karatzas/Shreve[1]).
Wenn X mit dem Parameterraum T und Y mit dem Zustandsraum Z
identifiziert wird, so muss zunächst geprüft werden, ob es sich dabei
überhaupt um topologische Räume im Sinne der Definition handelt und so
die Voraussetzungen für die Existenz stetiger Abbildungen erfüllt sind.
Der Raum T stellt sich als Intervall I ⊂
dar, auf dem eine beliebige Metrik
d definiert werden kann. T ist also o.B.d.A. metrisch und somit aufgrund
dieser Eigenschaft mit der Topologie des metrischen Raumes O(d) versehen.
Ist dies der Fall, so ist der erzeugte toplogische Raum auch metrisierbar
(Aussage ist trivial), was aber wiederum impliziert, dass es sich um einen
Hausdorffraum (vgl. Kap. 3.1.1.) handelt.
Diplomarbeit Stochastische Prozesse
100
Georg Messerle LRT 2002
7. Brownsche Bewegung
Bemerkung:
Man könnte auch durch Wahl einer geeigneten Subbasis S eine Topologie
auf T definieren, z.B. die diskrete Topologie, wenn man als Menge S aller von
vorne herein offenen Mengen, alle Elemente des Intervalls T definieren
würde.
Die Menge Z ist nach Voraussetzung (Kap. 4.1.1.) ein Teilraum der
Trägermenge Ω:
Z ⊂Ω⊂
wobei Ω ein beliebiger Messraum (Ω,F) ist,
welcher mit einer Borel´schen σ-Algebra F, also einer speziellen Topologie
(Kap. 3.1.3.)[A3], versehen ist.
Als Teilraum von Ω, ist Z mit der so
genannten Teilraumtopologie
F Z = {U ∩ Z U ∈ F }
ausgestattet, welche im Übrigen dieselbe Feinheit wie die auf ganz Ω
geltende Topologie F hat. Nach Voraussetzung ist der Zustandsraum „stetig“,
d.h. besitzt ebenfalls die Hausdorff-Eigenschaft (Jänich[23]).
Bemerkung:
Ist f:X→Y stetig und X 0 ⊂ X ein Teilraum, so ist auch die Einschränkung
f X0 : X0 → Y
stetig.
Die Voraussetzungen für die Existenz einer stetigen Abbildung zwischen den
Räumen T und Z sind also erfüllt. Betrachten wir nun die Abbildung
t → X ( t ) genauer:
Es muss nachgeprüft werden, ob die Urbilder t, der auf (Z, F Z ) offenen
Funktionswerte X(t) wieder offene Mengen der sich auf T befindlichen
Topologie O(d) sind, d.h. ob gilt: f −1 ( X (t ) ) ⊂ V mit t ∈ V und V eine Umgebung
von t ist.
Gülte auf T nun die diskrete Topologie, so wäre die Forderung von vorne
herein erfüllt, da jedes t aufgrund der Konstruktion der diskreten Topologie
auf T automatisch offen wäre. Im Falle der Topologie des metrischen Raumes
Diplomarbeit Stochastische Prozesse
101
Georg Messerle LRT 2002
7. Brownsche Bewegung
O(d) auf T, kann die Frage nicht so leicht beantwortet werden, da nicht von
Anfang an klar ist, ob das Urbild t einer in O(d) offenen Menge angehören
muss. Man kann jedoch davon ausgehen, dass T als Intervall offen in der
üblichen Topologie ist, d.h. zu jedem t auch eine „Kugel“ um diesen Punkt in
der Topologie enthalten ist. Kritisch ist diese Annahme für unsere Zwecke
lediglich an den Randpunkten von T. Wir setzen ohne Beweis voraus, dass
wir es i.A. mit inneren Punkten zu tun haben, also t ∈ B wobei die B
Umgebungen von t sind.
Ist dies der Fall, sind die t zumindest mit hoher Wahrscheinlichkeit offen
und die Abbildung stetig. Allerdings kann das Argument dann erweitert
werden: Sind die t ∈ B und die B Umgebungen, dann ist f eine bijektive
Abbildung (da sowohl Bild und Urbild stets offen sind und umgekehrt) und
wird Homöomorphismus genannt.
Man kann also aufgrund der topologischen Beschaffenheiten der beiden
Räume T und Z, zumindest mit hoher Wahrscheinlichkeit davon ausgehen,
dass die Abbildung t→X(t) stetig ist. Keine Probleme bereitet die Behandlung
der Topologie des Zustandsraumes, da alle X(t) natürlich Elemente auf Z
offener Mengen sind (Kap. 3.2.2.) und die „Prüfung auf Offenheit“ nicht
Voraussetzung des Stetigkeitsbegriffes war.
7.7. Die Kovarianzmatrix der 3-dimensionalen Bewegung
7.7.1. Die Kovarianzfunktion
Wir betrachten einen beliebigen über (Ω,F,P) mit F =
d
definierten,
dreidimensionalen Prozess:
⎧⎛ X 1x ⎞ ⎛ X 2x ⎞
⎛ X nx ⎞ ⎫
⎪⎜
⎟ ⎜
⎟
⎜
⎟⎪
X t = ⎨⎜ X 1y ⎟ , ⎜ X 2y ⎟ ,..., ⎜ X ny ⎟ ⎬
⎪⎜ z ⎟ ⎜ z ⎟
⎜ X nz ⎟ ⎪
⎝
⎠⎭
⎩⎝ X 1 ⎠ ⎝ X 2 ⎠
∼
Diplomarbeit Stochastische Prozesse
102
Georg Messerle LRT 2002
7. Brownsche Bewegung
Das
Problem
besteht
nun
darin,
dass
sich
bei
einem
n-wertigen
Zufallsvektor allein bei der Betrachtung einer einzelnen Dimension eine n×nMatrix ergibt. Für die Behandlung aller Kovarianzen, also auch derer der
Spaltenvektoren, steht kein Mittel zur Verfügung. Darüber hinaus sind die
Komponenten der Spaltenvektoren nach Voraussetzung unabhängig und
somit alle Kovarianzen gleich Null. Die Betrachtung derselben liefert also
auch keine neuen Erkenntnisse.
Eine Alternative besteht in der Betrachtung der Zuwächse. Dabei ist gerade
die Länge der Zuwächse normalverteilt mit Mittelwert 0 und Varianz t-s. Wir
betrachten
nun
zunächst
die
Kovarianzfunktion
und
dann
die
Kovarianzmatrix.
Mit den Ergebnissen aus (Kap. 7.3.) ist:
Cov( X t , X s ) = K ( s, t ) = E ( X t X s ) − mt ms
= min {t , s}
Wegen der Markov-Eigenschaft sind jeweils nur aufeinander folgende
Zeitpunkte korreliert. Bemerkenswert sind Varianz und Kovarianz. Sie
nehmen
mit
der
Zeit
zu.
Dies
repräsentiert
signifikant
das
Diffussionsverhalten der Teilchen. Ausgehend von einem deterministischen
Startpunkt zum Zeitpunkt t = 0 der an der Stelle x = 0, breiten sich die
Teilchen aus. Dabei wächst die Varianz linear mit der Zeit an.
Um herauszufinden, was passiert, wenn t→s strebt, betrachten wir
folgenden eindimensionalen Prozess:
⎧
⎫
⎨ X 0 , X 1 , X 2 ,..., X n ⎬
n
n
n⎭
⎩
Der Parameter n teilt hierbei das Einheitsintervall [0,1] in n gleiche Teile auf.
Auf diese Weise wird der Parameterraum partitioniert (Vgl. „Brownsche
Brücke“
(Karatzas/Shreve[358])).
Strebt
n→∞
so
ergibt
sich
ein
Grenzübergang zu stetigem Parameterraum. Wir betrachten im Folgenden
Diplomarbeit Stochastische Prozesse
103
Georg Messerle LRT 2002
7. Brownsche Bewegung
das Verhalten der Varianz und Kovarianz, sowie der Korrelationsfunktion.
Dazu bedienen wir uns wiederum der Zuwächse:
Mit:
X = X k − X k −1
n
n
und den Ergebnissen aus Kap. 6.7. ist die Varianz
⎛
⎞ k k −1 1
Var ⎜ X k − X k −1 ⎟ = −
=
n
n
n
n ⎠
⎝ n
Strebt n nun gegen unendlich, so verschwindet die Varianz (der Prozess wird
zum so genannten „weißen Rauschen“; man kann weißes Rauschen auch
auf Grundlage anderer Prozesse, z.B. des Poisson-Prozesses beobachten
(Waubke[40])). Es ergibt sich ein scheinbarer Widerspruch, denn bei stetigem
Parameterraum (und nichts anderes bedeutet n→∞) wäre die Varianz stets 0.
Natürlich wäre aber auch der Zuwachs infinitesimal. Die Kopplung von
Zuwachs und Varianz gilt auch im Infinitesimalen.
Um das Problem näher zu beleuchten, betrachten wir die Kovarianzfunktion:
⎛
⎞
k −1
⎛ k k −1 ⎞
K⎜ ,
⎟ = E ⎜ X k X k −1 ⎟ − mk −1 mk =
n
⎝n n ⎠
n
n
⎝ n n ⎠
0
Daraus folgt:
k −1
⎛ k k −1 ⎞
=0=K⎜ ,
⎟
n →∞ n
⎝n n ⎠
lim
Betrachtet man jedoch die Kovarianzmatrix des Hilfsprozesses, z.B. für n=3,
so ist:
⎡1
⎢3
⎢
⎛ k −1 k ⎞ ⎢1
, ⎟=
Λ = Cov ⎜
⎝ 3 3 ⎠ ⎢3
⎢
⎢1
⎢⎣ 3
Diplomarbeit Stochastische Prozesse
104
1
3
2
3
2
3
1⎤
3⎥
⎥
2⎥
3⎥
⎥
3⎥
3 ⎥⎦
Georg Messerle LRT 2002
7. Brownsche Bewegung
Man erkennt, dass sie Matrix symmetrisch und positiv semidefinit ist.
Es gilt folgender
Satz:
Ist X t eine normale reelle Brownsche Bewegung, so ist X t1 ⊗ ... ⊗ X tn für jede
Wahl endlich vieler Zeitpunkte 0 ≤ t1 ≤ ... ≤ tn eine (n-dimensionale) Gaußsche
Zufallsvariable
mit
dem
Nullvektor
als
Erwartungswert
und
der
Kovarianzmatrix
(
)
Cov X t1 ⊗ ... ⊗ X tn = ( ti ∧ t j )
i , j =1,..., n
Rein anschaulich ist dieser Satz seit der Berechnung der Kovarianzfunktion
im vorhergehenden Abschnitt klar. Diese Eigenschaft kann jedoch auch
noch auf anderem Wege gezeigt werden (Bauer[352]):
Setzt man:
(
X = X t1 ⊗ ... ⊗ X tn = X t1 ,..., X tn
)
so sind die Zufallsvariablen
X t1 , X t2 − X t1 ,..., X tn − X tn−1
wegen der Unabhängigkeit der Zuwächse (vgl. Kap. 7.4.) unabhängig. Man
kann für diese ZV nun ein multivariates Gauß-Maß ν definieren:
ν = ν 0,t ⊗ν 0,t −t ⊗ ... ⊗ν 0,t
1
2
1
n − tn−1
Dieses Maß repräsentiert die gemeinsame Verteilung. Es ist die „multivariate
Abbildung“ ins Einheitsintervall, aus der von den Ereignismengen erzeugten,
n-wertigen Produkt-σ-Algebra des Wahrscheinlichkeitsraumes (Kap. 7.2.).
Aufgrund der Eigenschaften von Gaußmaßen (Kap. 6.4.) folgt, dass auch X
eine Gaußsche Zufallsvariable ist. Da jedes X den Mittelwert Null besitzt
Diplomarbeit Stochastische Prozesse
105
Georg Messerle LRT 2002
7. Brownsche Bewegung
erhält man auch für den Vektor der Mittelwerte der gemeinsamen Verteilung
den Nullvektor. Damit lässt sich nun die Kovarianzmatrix berechnen:
(
) (
(
)
(
)
Cov X ti , X t j = E X ti X t j = E ⎡ X t j − X ti X ti + X ti 2 ⎤
⎣
⎦
= E ⎡ X t j − X ti X ti ⎤ + E X ti 2 = V X ti = ti = ti ∧ t j
⎣
⎦
)
(
)
( )
Im Beispiel eines dreistufigen Prozesses ergibt sich folgende Matrix:
(
Cov X t1 ⊗ X t2 ⊗ X t3
)
⎡t1 ∧ t2 t1 ∧ t2
= ⎢⎢t2 ∧ t1 t2 ∧ t2
⎢⎣ t3 ∧ t1 t3 ∧ t2
t1 ∧ t3 ⎤ ⎡1 1 1 ⎤
t2 ∧ t3 ⎥⎥ = ⎢⎢1 2 2 ⎥⎥
t3 ∧ t3 ⎥⎦ ⎢⎣1 2 3 ⎥⎦
Im Falle höherer Dimensionen nimmt die Matrix folgende Gestalt an:
(
Cov X t1 ⊗ X t2 ⊗ ... ⊗ X tn
)
⎡1
⎢1
⎢
⎢1
⎢
= ⎢.
⎢.
⎢
⎢.
⎢1
⎣
1 1 1 ...
1 ⎤
2 2 2 ...
2 ⎥⎥
3 3 3 ...
3 ⎥
⎥
3 4 4 ...
4 ⎥
3 4 5 ...
. ⎥
⎥
. . . n − 1 n − 1⎥
3 ... ... n − 1 n ⎥⎦
1
2
2
2
.
.
2
Die Matrix ist wiederum symmetrisch und positiv semidefinit. Darüber
hinaus gilt:
) (
(
(
Cov X t1 ⊗ ... ⊗ X tn = Cov X t1 ⊗ ... ⊗ X tn
))
−1
und
(Cov ( X
t1
⊗ ... ⊗ X tn
))
−1
( (
= Cov X t1 ⊗ ... ⊗ X tn
))
T
Die Matrix ist gegenüber der Invertierung und der Transposition invariant,
d.h. sie ist nicht nur symmetrisch, sondern auch orthogonal.
Diplomarbeit Stochastische Prozesse
106
Georg Messerle LRT 2002
8. Zusammenfassung
8. Zusammenfassung
Beginnend bei den Grundlagen der Wahrscheinlichkeitstheorie, unter
besonderer
Gewichtung
der
Grundlagen
der
Maßtheorie,
wurde
ein
Überblick über die Brownsche Molekularbewegung gegeben. Dabei wurde
konsequent ein leicht nachvollziehbarer Aufbau verwendet, der einem
Studenten den einfachen Zugang ermöglichen soll. Zunächst wurden
deshalb stochastische Prozesse im Allgemeinen beleuchtet und eine
Einführung in die Markov´schen Ketten gegeben. Diese sehr allgemein
gehaltene Vorstellung wurde durch die Betrachtung des Langzeitverhaltens
einer zufälligen Irrfahrt und der sich ergebenden Asymptotik weiter
verfeinert.
In Verbindung mit der Verstetigung des Parameterraumes der
zufälligen Irrfahrt und der Ableitung der Diffusionsgleichung, wurde die
Annäherung der Irrfahrt an den Wiener-Prozess gezeigt. Die Ableitung der
Normalverteilung als Lösung der auch für Wiener-Prozesse gültigen FokkerPlanck-Gleichung, bestätigte dies.
Die Normalverteilung wurde dann noch einmal axiomatisch eingeführt und
mit Hilfe des Faltungssatzes im Falle unabhängiger Zufallsvariablen auf
zunächst zwei Dimensionen erweitert. Um die Markov-Eigenschaft mit
einzubinden
und
die
Korrelation
aufeinander
folgender
ZV
zu
berücksichtigen, wurde die bedingte Verteilung abgeleitet und ihr Verhalten
für die Variation der Zeit, insbesondere für das Anfangsverhalten, studiert.
Im
Kapitel
„Brownsche
Bewegung“
wurde
dann
der
Wiener-Prozess
definitorisch eingeführt und die Brownsche Bewegung auch formell den
Markov-Prozessen zugeordnet. Unter Ausnutzung der zuvor nachgewiesenen
Unabhängigkeit der Zuwächse wurde darüber hinaus eine Form der
gemeinsamen Verteilung angegeben, die das Problem der Korrelation umgeht
und eine handliche Berechnung ihrer Kennzahlen ermöglicht. Abschließend
wurde die Kovarianzmatrix berechnet, um deren Charakteristiken zu zeigen.
Diplomarbeit Stochastische Prozesse
107
Georg Messerle LRT 2002
Glossar
7.
Glossar
[A1]
Unter dem kartesischen Produkt einer Menge M versteht man die
Menge der möglichen paarweisen Kombinationen ihrer Elemente. Z.B.:
M={1,2,3}, dann ist MxM={11,12,13,23,22,33}, d.h. die Menge aller Paare.
[A2]
Die Potenzmenge einer Menge Ω ist die „Menge aller Teilmengen“ von
Ω, also die Menge aller aus Punkten von Ω zusammengesetzten Mengen und
Permutationen.
[A3]
Die Borel´sche σ-Algebra, benannt nach Émile Borel, bildet in der
Mathematik ein Scharnier zwischen Topologie und Maßtheorie. Für einen
gegebenen topologischen Raum Ω ist die Borel´sche σ-Algebra definiert als
die kleinste σ-Algebra, die die Topologie von Ω enthält.
Vokabelerklärung:
•
Eine Topologie einer Grundmenge Ω ist eine Menge von Teilmengen,
die die Grundmenge und die leere Menge enthält und die bezüglich
beliebiger
(auch
überabzählbarer)
Vereinigung
und
endlicher
Schnittmengenbildung abgeschlossen ist. Die Elemente der Topologie
heißen offene Mengen. Eine Grundmenge zusammen mit einer auf ihr
erklärten Topologie heißt topologischer Raum.
•
Eine σ-Algebra einer Grundmenge Ω ist eine Menge von Teilmengen,
die die Grundmenge enthält und die bezüglich Komplementbildung
und abzählbarer Vereinigung abgeschlossen ist. Eine Grundmenge
zusammen mit einer auf ihr erklärten σ-Algebra heißt auch Messraum.
Eine Borel´sche σ-Algebra ermöglicht es somit, einen topologischen Raum in
kanonischer
Weise
mit
der
zusätzlichen
Struktur
eines
Messraums
auszustatten. Im Hinblick auf diese Struktur heißt der Raum dann auch
Borel-Raum.
Diplomarbeit Stochastische Prozesse
108
Georg Messerle LRT 2002
Glossar
Ein besonders wichtiges Beispiel ist die Borel´sche σ-Algebra auf der Menge
der reellen Zahlen. Die kanonische Topologie des
wird von den offenen
Intervallen (a,b) aufgespannt. Die Borel´sche σ-Algebra des
(aufgrund
der
Abgeschlossenheit
einer
σ-Algebra
enthält
bezüglich
der
Komplementbildung) außer den offenen auch die geschlossenen Intervalle.
Die Borel´sche σ-Algebra des
enthält nicht alle Teilmengen des
zeigt man, indem man den
mittels des Auswahlaxioms in bestimmte
. Das
überabzählbar viele Teilmengen (Vitali-Mengen, nach Giuseppe Vitali (1875 1932)) zerlegt; diese lassen sich nicht durch abzählbare Vereinigung,
Schnittmengenbildung und Komplementbildung aus den offenen Intervallen
des
erzeugen. Siehe dazu: Vitali-Menge, Hausdorff-Paradoxon, Banach-
Tarski-Paradoxon.
Genau genommen lässt sich sogar zeigen, dass die Borel´sche σ-Algebra
gleichmächtig zur Menge der reellen Zahlen ist und somit echt kleiner als die
Potenzmenge von
. Die Borel´sche σ-Algebra liegt Borel-Maßen zugrunde.
(Quelle:http://de.wikipedia.org/wiki/Borel-Algebra)
[A4]
Betrachtet man ein Glücksrad mit x gleichgroßen Feldern d.h.
Partitionen, dann ist die Wahrscheinlichkeit eine beliebige Partition k mit
0<k<x zu treffen P(k)=1/x. Halbiert man nun die Felder, so verringert sich
die Wahrscheinlichkeit auf P(k)=1/2x, da sich die Anzahl der Felder
verdoppelt hat. Verfährt man auf diese Weise immer weiter, d.h. erhöht die
Anzahl der Felder nach der Vorschrift A(x)=N 2x wobei x=0, 1, 2,…, dann
verringert sich die Wahrscheinlichkeit ein Feld k zu treffen um P(k)=1/ N 2x.
Schrumpfen nun die Felder bis auf Linien der Breite 0 zusammen, ist die
⎛ 1
Wahrscheinlichkeit eine solche zu treffen P(k)= lim ⎜
x →∞ N 2 x
⎝
⎞
⎟ = 0.
⎠
Diplomarbeit Stochastische Prozesse
Georg Messerle LRT 2002
109
Glossar
[A5]
Der Durchschnitt von σ-Feldern ist wiederum ein σ-Feld.
Beweis:
Es sei F = ∩ Θ FΘ
wobei die FΘ σ-Felder sind.
Ω ∈ FΘ für alle Θ → Ω ∈ F
A ∈ F impliziert, dass A ∈ FΘ ∀ Θ → Ac ∈ FΘ ∀ Θ
Wenn gilt: An ∈ F für alle n, dann gilt auch An ∈ FΘ für alle n, Θ
Daraus folgt, dass die Vereinigung
∪
n
An ∈ FΘ ebenfalls ein
Element von FΘ ist. Dann ist diese Vereinigung aber auch ein
Element von F. Ist die Vereinigung beliebiger σ-Felder sowohl in
F als auch in FΘ enthalten, wobei F = ∩ Θ FΘ gilt, so muss F
wiederum ein σ-Feld sein.
[A6]
1827 beobachtete der schottische Botaniker Robert Brown unter dem
Mikroskop, wie Pflanzenpollen sich in einem Wassertropfen unregelmäßig
hin- und herbewegten (daher der Name Brownsche Bewegung). Doch es
waren nicht Naturwissenschaftler, die die Entwicklung des mathematischen
Modells vorantrieben: 1880 beschrieb der Statistiker und Astronom Thorvald
Nicolai Thiele (1838-1910) in Kopenhagen erstmals einen solchen "Prozess"
(die Theorie der stochastischen Prozesse war damals allerdings noch nicht
entwickelt), als er wirtschaftliche Zeitreihen und die Verteilung von Residuen
bei der Methode der kleinsten Quadrate studierte.
1900 griff der französische Mathematiker Louis Bachelier (1870-1946), ein
Schüler Poincarés, Thieles Idee auf, als er versuchte, die Kursbewegungen
an der Pariser Börse zu analysieren. Beide Ansätze hatten letztendlich nur
geringen Einfluss auf die zukünftige Entwicklung des Prozesses, zum Teil
wohl aus dem Grunde, dass Finanzmathematik zu diesem Zeitpunkt eine
untergeordnete Rolle in der Mathematik jener Zeit spielte (heute jedoch gilt
gerade die Finanzmathematik als Hauptanwendungsgebiet von WienerProzessen). Dennoch bevorzugte zum Beispiel der Stochastiker William Feller
die Bezeichnung Bachelier-Wiener-Prozess.
Diplomarbeit Stochastische Prozesse
110
Georg Messerle LRT 2002
Glossar
Der Durchbruch kam 1905, als Albert Einstein in seinem annus mirabilis
den Wiener-Prozess in seiner heutigen Gestalt definierte - offenbar ohne
Kenntnis von Bacheliers Arbeiten. Seine Motivation war es, die Bewegung
der brownschen Partikel durch die molekulare Struktur des Wassers zu
erklären (ein Ansatz, der damals äußerst kontrovers war, heute aber
unbestritten ist) und diese Erklärung mathematisch zu untermauern.
Interessanterweise forderte er dabei eine weitere, physikalisch sinnvolle
Eigenschaft, die Rektifizierbarkeit der Zufallspfade, für sein Modell nicht.
Obwohl dies bedeutet, dass die Partikel in jeder Sekunde eine unendlich
lange
Strecke
zurücklegen
(was
das
gesamte
Modell
theoretisch
disqualifiziert), bedeutete der Einsteinsche Ansatz den Durchbruch sowohl
für die molekulare Theorie, als auch für den stochastischen Prozess. Einen
Beweis für die wahrscheinlichkeitstheoretische Existenz des Prozesses blieb
Einstein
allerdings
schuldig.
Dieser
gelang
erst
1923
dem
US-
Amerikanischen Mathematiker Norbert Wiener, der dabei neue Hilfsmittel
von Lebesgue und Borel auf dem Gebiet der Maßtheorie ausnutzen konnte.
Dennoch war sein Beweis so lang und kompliziert, dass ihn wohl nur eine
handvoll Zeitgenossen verstehen konnten. Von Itō Kiyoshi ist überliefert,
dass er einige seiner größten Fortschritte bei der Entwicklung des
stochastischen
Integrals
bei
dem
Versuch
erreichte,
Wieners
Arbeit
nachzuvollziehen.
Letztendlich war es auch Itō, der dem Wiener-Prozess den Weg von der
Physik in andere Wissenschaften ebnete: durch die von ihm aufgestellten
stochastischen
Differentialgleichungen
konnte
man
die
Brownsche
Bewegung an mehr statistische Probleme anpassen. Bacheliers Ansatz
scheiterte letztendlich daran, dass der Wiener-Prozess, unabhängig von
seinem Startwert, im Laufe der Zeit fast sicher einmal negative Werte
erreicht, was für Aktien unmöglich ist. Doch die durch eine stochastische
Differentialgleichung abgeleitete geometrische Brownsche Bewegung löst
dieses Problem und gilt seit der Entwicklung des berühmten Black-ScholesModells als Standard. Heute werden in praktisch allen Natur- und vielen
Geisteswissenschaften brownsche Bewegungen und verwandte Prozesse als
Hilfsmittel verwendet. (Quelle: Wikipedia )
Diplomarbeit Stochastische Prozesse
111
Georg Messerle LRT 2002
Glossar
[A7]
Sind
Kovarianzmatrix, Bedeutung
X,
Y,
Z
Zufallsvariablen,
dann
ist
die
Kovarianzmatrix
des
Zufallsvektors (X,Y,Z) gegeben durch
Bildhaft kann man sich eine Abnahme der Werte in der Matrix mit
zunehmendem Abstand von der Hauptdiagonalen, als eine Abnahme der
Korrelation
zwischen
"weit
voneinander
entfernten"
Ereignissen
im
Zufallsprozess vorstellen. "Der Apfel fällt nicht weit vom Stamm" verdeutlicht
dies: Je mehr man sich vom Stamm (Hauptdiagonale) entfernt, desto weniger
Äpfel (kleinere Matrixeinträge) wird man finden.
(Quelle: http://de.wikipedia.org/wiki/Kovarianzmatrix)
[A8]
Bemerkung:
Mein alter Physiklehrer würde sagen, es handle sich bei der folgenden
Argumentation um ein „Hand-waving-argument“, d.h. eine unexakte,
unvollständige,
aber
zum
besseren
Verständnis
äußerst
hilfreiche
Eselsbrücke.
[A9]
m m2 m
m
m 2 m3
1
1
1
ln p = n ln n + ln n + ln 2 − ln n +
+ 2 − ln 2 + ln n −
−
2
2
2
2n 4n
2
2
2n 4n 2
n
n
m 1
m m2 m
m
m2
1
+ ln 2 − ln n + + ln 2 − ln n −
+
+ ln 2 − ln n −
2
2
2 2
2
2n 4 n 2 2
2
2n
3
2
m
n
n
m m 1
+ 2 + ln 2 − ln n − +
− ln 2π − n ln 2
4n 2
2
2 4n 2
m2 m2
1
1
1
= ln 2 − ln π − ln n + 2 −
2
2
2
2n
2n
Diplomarbeit Stochastische Prozesse
112
Georg Messerle LRT 2002
10. Literaturverzeichnis
10. Literaturverzeichnis
[1]
Billingsley, Patrick; “Probability and Measure”; Wiley, 1995
[2]
Lawler, Gregory F.; “Introduction to Stochastic Processes”; Chapman
and Hall, 1995
[3]
Montgomery
D.C./Beichelt
F.;
„Taschenbuch
der
Stochastik“;
Teubner- Verlag 2003
[4]
N. Borodin/ P. Salminen; “Handbook of Brownian Motion”; Birkhäuser
Verlag 1996
[5]
Lifshits, M. A.; “Gaussian Random Functions”; Kluwer Academic
Publishers 1995
[6]
Merziger / Wirth; „Repetitorium der höheren Mathematik“; Binomi
Verlag 1999
[7]
Basieux, Pierre; „Die Architektur der Mathematik“; Rowohlt Verlag
2000
[8]
Plachky,
D.;
„Einführung
Wahrscheinlichkeitstheorie
und
in
die
Grundbegriffe
mathematischen
der
Statistik“;
Oldenbourg-Verlag 2000
[9]
Z. Brzezniak/ T. Zastawniak; “Basic Stochastic Processes”; SpringerVerlag 1999
Diplomarbeit Stochastische Prozesse
113
Georg Messerle LRT 2002
10. Literaturverzeichnis
[10]
S. Srinivasan/ K. Mehata; “Stochastic Processes”; Tata McGraw-Hill
Publishers, New Delhi, 1988
[11]
Schmidt, Volker; Skript: „Wahrscheinlichkeitstheorie“; Universität
Ulm, Sommersemester 2005
[12]
Marti,
Kurt;
Skript:
„Statistik
für
Ingenieure“;
Universität
der
Bundeswehr München 2004
[13]
Jänich, Klaus; „Topologie“; 8. Auflage, Springer-Verlag 2005
[14]
Schmidt, Volker; Skript „Wahrscheinlichkeitsrechnung“; Uni Ulm,
Wintersemester2003/2004.
[15]
Stroock, D./Varadhan, S.R.; “Multidimensional Diffusion Processes”;
Springer-Verlag 1997
[16]
Karlin, S; “A First Course in Stochastic Processes”; Academic Press
New York 1972
[17]
Bailey, N.T.J.; “The Elements of Stochastic Processes”; Wiley 1990
[18]
Freund, J. /Pöschel,T; “Stochastic Processes in Physics, Chemistry
and Biology”; Springer-Verlag 2000
[19]
Karatzas, I. /Shreve, S; “Brownian Motion and Stochastic Calculus”;
Springer-Verlag 1988
[20]
Bauer, H; „Wahrscheinlichkeitstheorie“; de Gruyter-Verlag 1991
Diplomarbeit Stochastische Prozesse
114
Georg Messerle LRT 2002
10. Literaturverzeichnis
[21]
Waubke,
H;
„Moment-Closure
elastoplastischen
Reaktion
von
Technik
zur
Abschätzung
Stockwerksrahmen
auf
der
zufällige
Belastungen aus Windereignissen“; Habilitationsschrift, Technische
Universität
München,
Fakultät
für
Bauingenieur-
und
Vermessungswesen,1999.
[22]
Schönes Applet zur Simulation eines Weißen Rauschens:
http://www.mpg.unirostock.de/~reinhard/lehre/viewerapplet/index.html
[23]
Risken, H. / Haken, H. (Hrsg.): „The Fokker-Planck Equation”; 2nd Ed.
Springer-Verlag 1984 (Springer Series in Synergetics, Vol. 18).
[24]
Bronstein,
I.
N./Semendjaev,
K.
A./Musiol,
G./Mühlig,
H.:
„Taschenbuch der Mathematik“; 2., überarb. und erw. Aufl. Frankfurt
am Main, Harri Deutsch Verlag, 1995.
[25]
Dreger,
Jens;
„Untersuchung
des
Starkkopplungsverhaltens
der
Fokker-Planck-Gleichung mit anharmonischer Drift“; Diplomarbeit,
Freie Universität Berlin, Fachbereich Physik; 2002
[26]
von
Randow;
Gero;
„Das
Ziegenproblem
-
Denken
in
Wahrscheinlichkeiten“; 9. Aufl., Rowohlt-Verlag 2000
[27]
Gisela Kobelt; „Einführung in die ökonomische Evaluation“, OHE,
London
Verwendete Adressen im WWW:
http://www.mathematik.uniulm.de/stochastik/lehre/ss05/wt/skript
/node47.html
Diplomarbeit Stochastische Prozesse
115
Georg Messerle LRT 2002
10. Literaturverzeichnis
http://de.wikipedia.org/wiki/Kovarianzmatrix
http://.www.wikipedia.org/index/math/brownian.motion.html
http://www.mathematik.uniulm.de/stochastik/lehre/ws03_04/wr/sk
ript/skript.html
http://www.kfs.oeaw.ac.at/staff_and_associates/waubke/publications
/habil.pdf
http://de.wikipedia.org/wiki/Borel-Algebra
http://www.biologie.de/biowiki/Bild:Wienerprozess.png
Diplomarbeit Stochastische Prozesse
116
Georg Messerle LRT 2002
10. Literaturverzeichnis
Diplomarbeit Stochastische Prozesse
113
Georg Messerle LRT 2002