Skript
Werbung

1.
Mechanik
Wir teilen in der Vorlesung „Physik für Ingenieure“ die Mechanik auf in die Teilgebiete
•
•
•
Mechanik des Massenpunkts
Mechanik des starren Körpers (Kap. 1.4)
Mechanik der Flüssigkeiten und Gase (Kap. 1.5)
Zunächst werden also hauptsächlich sogenannte „Massenpunkte“ oder „Punktmassen“ behandelt.
Natürlich gibt es keine wirklich „punktförmigen“ Körper1. Ein Massenpunkt ist ein Modell, das
vernünftige und aussagekräftige Ergebnisse liefert, wenn die Ausdehnung der Körper klein sind
gegen die Abmessungen des Raumgebiets, in dem er sich bewegt. Für ein Elektron in einer
Bildröhre trifft das zweifelsfrei zu. Aber auch die Erde kann als Massepunkt betrachtet werden,
wenn man die Bahn der Erde um die Sonne betrachtet. Im Modell „Massenpunkt“ werden
Drehungen des Körpers und alle „internen“ Bewegungen (innere Freiheitsgrade) nicht betrachtet.
Behandeln wir ein Auto näherungsweise als Massenpunkt, so können wir durchaus Weg,
Geschwindigkeit, Beschleunigung, Antriebskraft, Leistung etc. angeben bzw. berechnen (und für
viele Zwecke reicht das aus). Ein reales Auto hat eine Ausdehnung, es kann sich um verschieden
Achsen drehen, es gibt zahlreiche elastischen Komponenten, die sich bei Belastung verformen, es
gibt intern Teile, die rotieren oder schwingen , … Für eine Fahrdynamik-Simulation reicht das
Modell „Massenpunkt“ deshalb nicht aus. Hier werden kompliziertere Modelle mit vielen
Freiheitsgraden verwendet, die Sie aber erst verstehen können, wenn Sie den „Massepunkt“ verstanden haben.
„Mechanik des Massenpunkts“
Wir unterteilen dieses Kapitel weiter in
einen ersten Teil, in dem wir Bewegungen lediglich (mit mathematischen
Modellen) beschreiben.
Anschließend fragen wir nach den Ursachen von Veränderungen des Bewegungszustands. Da reale Körper eine
Masse haben und „träge“ sind, sind
hierzu Kräfte nötig.
Im dritten Teil behandeln wir die für die
Mechanik
wichtigen
„Erhaltungssätze“ Diese erlauben es, die Berechnung mechanischer Vorgänge dadurch
zu vereinfachen, dass „Bilanzierungsgleichungen“ verwendet werden.
Wir werden in allen drei Teilen sowohl
die
Translation
(geradlinige
Bewegung) als auch die Rotation
(Drehbewegung) behandeln.
1.1
KINEMATIK
Bewegungslehre
Wie
bewegt sich ein Objekt?
1.2
DYNAMIK
Kräfte...
Warum?
Ursache der Beweg. -Änderung
1.3
Erhaltungssätze
Erhaltung
von
• Energie
• Impuls
• Drehimpuls
1
Es gibt aber sehr, sehr kleine Elementarteilchen. Bei einigen davon (z.B. Elektronen und Quarks) konnte bisher keine
Struktur und keine wirkliche Ausdehnung gemessen werden; sie benehmen sich also wie „punktförmige“ Objekte,
obwohl das (aus Gründen die hier nicht näher erläutert werden) physikalisch eigentlich gar nicht möglich ist. Dieser
scheinbare Widerspruchs kann erst in der Quantenphysik aufgelöst werden.
Physik_1_1_Kinematik.doc, Prof. Dr. K. Rauschnabel, HHN, 21.10.2014 11:57
S.1/39
Zur Mechanik gehören natürlich auch noch die (wichtigen!) Kapitel Statik (Kräfte-/
Momentengleichgewicht) und die Elastizitätstheorie. Diese werden wir in der Physik aber nur am
Rande besprechen, da sie in den Ingenieursstudiengängen i.d.R. im ersten Semester in Technische
Mechanik ausführlichst behandelt werden.
1.1 Kinematik
Bewegung eines (Masse-)
Punkts wird in best.
Die Kinematik oder Bewegungslehre befasst sich
mit der Beschreibung von Bewegungsvorgängen
mit Hilfe von geeigneten Koordinaten,
Geschwindigkeiten, Beschleunigungen etc.
Bezugssystem
Bezugssysteme
Man muss sich darüber im Klaren sein, dass die
Beschreibung einer Bewegung immer ein
vorgegebenes Bezugssystem voraussetzt. Der
gleiche
Bewegungsvorgang
kann
in
unterschiedlichen Bezugssystemen mit völlig
anderen Zahlen für Ort, Geschwindigkeit etc.
beschrieben werden
beschrieben
z.B. x,y,z-Koordinaten
Beispiele:
-
-
-
-
Sie werfen Ihrem Nachbarn im fahrenden Zug
einen Apfel zu. Die Bewegung des Apfels
kann Bezugssystemd es Zugs oder auch vom
Bahndamm aus beschrieben werden.
Die NASA schickt eine Raumsonde zum
Mars. Die Bewegung der Raumsonde kann
im Bezugssystem der Erde, der Sonne oder
des Mars beschrieben werden. Für die
verschiedenen Flugphasen wird man hier
verschiedene System wählen: Der Start ist
sicher im erdgebundenen System am
einfachsten zu beschreiben; für den
interplanetaren Flug wird man ein
Bezugssystem wählen, in dem die Sonne im
Ursprung des Koordinatensystems liegt; für
den Landeanflug wird man am dagegen ein
marsgebundenes System bevorzugen.
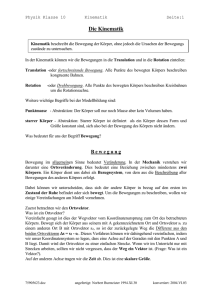
Bezugssysteme
Punkt P bewegt sich –
Beschr. der gleichen Bewegung durch
Beobachter O / O’ / O’’ ergibt
verschiedene Koordinaten (x,y,z) /
(x’,y’,z’) / (x’’,y’’,z’’) und
Geschwindigkeiten v / v’ / v’’
z
x
O
y
z’
Ein Roboter montiert z.B. eine Autoscheibe
und bewegt sich dabei auf Schienen parallel O’
zum Band neben dem Auto her. Die
Bewegung des Greifarms kann hier entweder x’
im Bezugssystem der Werkshalle oder im
eigenen Koordinatensystem des Roboters
beschrieben werden.
y’
z’’
O’’
y’’
x’’
Ein Schiff fährt auf einem Fluss. Seine Geschwindigkeit kann relativ zum Ufer oder relativ zum
Wasser angegeben werden. Je nachdem, wie groß die Strömungsgeschwindigkeit des Flusses
ist, kann der Unterschied beträchtlich sein.
Physik_1_1_Kinematik.doc, Prof. Dr. K. Rauschnabel, HHN, 21.10.2014 11:57
S.2/39
Wir werden später auf unterschiedliche Bezugssysteme (insbesondere auf das sogenannte
„Schwerpunktsystem“) zurück kommen und auch die Umrechnung zwischen verschiedenen
Bezugssystemen behandeln.
1.1.1 Geschwindigkeit
Wir beschränken uns zunächst auf die Beschreibung von eindimensionalen Bewegungen, d.h.
solche Bewegungen, bei denen zu Angabe der Position eine einzige Zahl (mit Einheit!) genügt. Dies
ist z.B. der Fall bei einer geradlinigen Bewegung oder bei einem Schienenfahrzeug, das sich zwar
auf einer kurvigen Bahn bewegt, bei dem aber auch die Angabe des „Streckenkilometers“ ausreicht,
um die Position anzugeben. Eine eindimensionale Bewegung lässt sich durch eine „Weg-Zeits = s (t ) 0
Funktion“
bzw.
„Orts-Zeit-Funktion“
s(t+Δt)
beschreiben. Ist diese Funktion bekannt, so kann z.B. ein
s(t)
Computerprogramm erstellt werden, das für beliebige
Zeitpunkte t die bis dahin zurückgelegte Wegstrecke s
Δs
berechnet
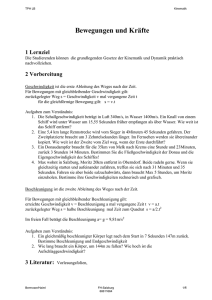
Die Weg-Zeit-Funktion“beschreibt die
gesamte Bewegung. Als Diagramm
dargestellt erhält man daraus einen
„grafischen Fahrplan“. Aus der WegZeit-Funktion ergibt sich auch die
Geschwindigkeit
und
(bei
beschleunigten
Bewegungen)
die
Beschleunigung.
Weg
Zeit
Geschwindigkeit =
s
A
Der Begriff Geschwindigkeit ist Ihnen
sicher bekannt. Schon allein aus den Stuttgart
Einheiten
(Kilometer/Stunde,
Meilen/Stunde, Meter/Sekunde etc.
ergibt sich, was mit Geschwindigkeit
gemeint ist.
B
C
D
Heilbronn
Wir
behandeln
Spezialfall:
zunächst
den
Konstante Geschwindigkeit
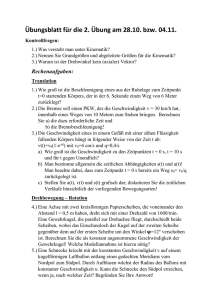
1.1.1.1 Konstante Geschwindigkeit
Bei einer Bewegung mit konstanter Geschwindigkeit
werden in gleichen Zeitintervallen immer die gleichen
Wegstrecken zurückgelegt. Es gilt also:
gleiche Zeit
gleicher Weg
doppelte Zeit
doppelter Weg
…
14:00
15:00
16:00
Uhrzeit
17:00
s
s1
s2
α
t1
Physik_1_1_Kinematik.doc, Prof. Dr. K. Rauschnabel, HHN, 21.10.2014 11:57
t2
t
S.3/39
Im Weg-Zeit-Diagramm erhält man eine Gerade. Anders ausgedrückt: Das Verhältnis von
s1 s2 s3
Weg : Zeit ist in diesem Fall immer gleich:
= = = K = const .
t1 t2 t3
Bei einer Bewegung mit konstanter Geschwindigkeit gilt:
s~t
;
„ Weg s ist proportional 2 zur Zeit t “
Jede Proportionalitätsrelation X ~ Y kann mittels einer Proportionalitätskonstanten C in eine
Gleichung X = C ⋅ Y überführt werden. Im Fall unserer Weg-Zeit- Proportionalität, s ~ t , erhalten
wir so s = v ⋅ t
Bei einer Bewegung mit konstanter Geschwindigkeit ist der in der Zeit t zurückgelegte Weg s
proportional zur Zeit t .
Die Geschwindigkeit ist dabei die Proportionalitätskonstante, es gilt
s = v ⋅t
[Gl.1.1.1.]
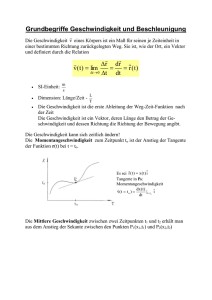
Im Weg-Zeit-Diagramm kann man die Geschwindigkeit am Steigungsdreieck ablesen. Die
Geschwindigkeit ist die Steigung der Geraden (im allgemeinen Fall, bei nicht konstanter
s
Geschwindigkeit: Steigung der Kurve!) im s-t-Diagramm: v = .
t
" Beachten Sie aber, dass die aus der Mathematik bekannte geometrische Interpretation
Steigung = tan α (mit dem Steigungswinkel α) direkt und unverändert nur verwendet
werden kann, wenn die Maßstabsfaktoren für die Zeit- und die Weg-Achse gleich sind
(wenn also das Diagramm mit z.B. im Maßstab 1 s =ˆ 1 cm und 1 m =ˆ 1 cm gezeichnet
wurde). In diesem Fall könnte der Zahlenwert {v} der Geschwindigkeit (der Tangens
{s}
eines Winkels hat keine Einheiten!) gemäß {v} = = tan α aus dem im Diagramm
{t}
abgelesenen Steigungswinkel α bestimmt werden.
Zeichnet man die Geschwindigkeit als Funktion der Zeit auf, so erhält man (bei konstanter
Geschwindigkeit) eine waagerechte Linie. Die Fläche v ⋅ t unter dieser Linie ist der zurückgelegte
Weg s = v ⋅ t .
s
v
Steigungsdreieck:
s
v=—
t
0
t
Steigung im Weg-Zeit-Diagramm
Fläche
= v ⋅t
0
t
Fläche im Geschwindigkeits-Zeit-Diagramm
Geschwindigkeit
2
Weg
Als Proportionalzeichen wird statt„ ~ “ gelegentlich auch das Zeichen „ ∝ “ verwendet.
Physik_1_1_Kinematik.doc, Prof. Dr. K. Rauschnabel, HHN, 21.10.2014 11:57
S.4/39
Bisher hatten wir vorausgesetzt…
"WEG":
seit Start zurückgelegter Weg
"ZEIT":
seit Start vergangene Zeit
D.h., für unsere Weg-Zeit-Funktion s (t ) galt für t = 0: s (0 ) = 0 . Im s–t–Diagramm ergibt sich
damit eine Ursprungsgerade.
Aber: Auf dem Bahnfahrplan fährt z.B. nicht jeder Zug um 0 Uhr bei km 0 ab. Um auch
Bewegungen beschreiben zu können, die nicht zur Zeit t = 0 und beim Ort s = 0 beginnen,
verwenden wir eine etwas allgemeinere „Orts-Zeit-Funktion“, die ohne diese speziellen
Anfangsbedingungen auskommt. Zur Beschreibung des Orts können wir bei einer geradlinigen
Bewegung z.B. eine der Koordinaten (x, y, oder z) verwenden, oder wir verwenden weiterhin den
Buchstaben s (z.B. bei einer krummlinigen Bewegung auf einer vorgegebenen Bahn).
Wir wollen nun eine Bewegung mit konstanter Geschwindigkeit, die zu einem Zeitpunkt t1 am Ort
s1 beginnt, mathematisch beschreiben.
s (t1 ) = s1
Die Anfangsbedingungen lauten also:
s
Der seit dem Start zurückgelegte Weg ist: s − s1
Die seit dem Start vergangene Zeit ist:
t − t1
Da die Geschwindigkeit konstant ist gilt:
Weg ~ Zeit ,
also:
Δs
(s − s1 ) ~ (t − t1 )
Mit der Geschwindigkeit v als Proportionalitätskonstanten ergibt sich die Gleichung
(s − s1 ) = v ⋅ (t − t1 )
α
s1
Δt
s0
Start
t1
t
Wenn man die letzte Gleichung nach s auflöst, so erkannt man, dass sie einen konstanten Teil und
eine von der Zeit t abhängigen Teil enthält: s = v{
⋅ t + (s1 − vt1 )
1
424
3
abh. von t !
konst.!
Wir bezeichnen den konstanten Teil mit s0 und erhalten
s = v ⋅ t + s0
[Gl.1.1.2.]
(bzw. mit anderen Buchstaben: x = v ⋅ t + x0 , y = v ⋅ t + y0 , h = v ⋅ t + h0 , …)
Im Orts-Zeit-Diagramm ergibt sich wieder eine Gerade. Diese ist aber verschoben, läuft also nicht
notwendigerweise durch den Ursprung. Die Gerade schneidet die s-Achse bei s0 – beachten Sie
aber, dass die Bewegung nicht unbedingt zum Zeitpunkt t = 0 beginnen muss; der Achsenabschnitt
s0 ergibt sich lediglich daraus, dass man die Gerade bis zu t = 0 extrapoliert. Die Gerade selbst wird
durch ihre Steigung (die Geschwindigkeit) und einen beliebigen Punkt (z.B. den Startpunkt (t1 s1 ) )
festgelegt. Aus dem Diagramm können wir wieder die Geschwindigkeit aus dem Steigungsdreieck
Δs s − s1
v=
=
[Gl.1.1.3.]
ablesen. Es gilt:
Δt t − t1
Übung:
Ein Fahrzeug fährt mit der Geschwindigkeit 120 km/h. Wie lange braucht es für 2 km?
Ein Radfahrer braucht für eine Strecke 5 km die Zeit 25 Min., Wie groß ist seine
Geschwindigkeit (in km/h , in m/s) ?
Die Schallgeschwindigkeit in Luft ist 340 m/s. Welche Strecke legt Schall in 20 ms zurück?
Physik_1_1_Kinematik.doc, Prof. Dr. K. Rauschnabel, HHN, 21.10.2014 11:57
S.5/39
Ultraschall (US) in Körpergewebe hat eine Geschwindigkeit von ca. 1500 m/s.
a) Wie lange braucht US für die Strecke von 30 cm ?
b) Wie lange braucht Röntgenstrahlung für die gleiche Stecke?
Die Lichtgeschwindigkeit im Vakuum ist c0 = 3 ⋅108 m/s .
a) Wie lange braucht das Licht ihrer Deckenlampe bis zum Fußboden?
b) Welche Strecke legt Licht (im Vakuum) in 10 ns zurück?
Die Lichtgeschwindigkeit in einem Medium ist cn = c0 n
Wasser: n ≈ 1,33 , Luft: n ≈ 1,000273
a) Welche Strecke legt Licht in Wasser in 0,01 µs zurück?
b) In welcher Zeit tW durchquert Licht die Strecke s in Wasser (Zahlenbeispiel: s = 10 µm);
welche Strecke L legt Licht in der gleichen Zeit im Vakuum zurück („optischer Weg“)?
d) Wie groß ist die Differenz der optischen Wege in 5 cm Luft und 5 cm Vakuum?
a) Beschreiben Sie in Worten die im Diagramm „Stuttgart-Heilbronn“ (Seite 3) dargestellten
Bewegungen der Fahrzeuge A – D! Welche Bedeutung habe die Schnittpunkte zweier Linien
(es gibt zwei verschiedene Arten von Schnittpunkten!)?
b) Die Fahrtstrecke HN-Stgt. sei 60 km. Bestimmen Sie (näherungsweise) die
Geschwindigkeiten der Fahrzeuge!
Ein Punkt auf einem Rad mit dem Radius 0,08 m bewegt sich mit der Geschwindigkeit 8 m/s.
Wie lange braucht er für 42 Umdrehungen?
Ein „Ding“ startet zum Zeitpunkt t1 = 27 s bei s1 = 123 m und bewegt sich mit der
konstanten Geschw. v = −100 m / s . Bestimmen sie die Orts-Zeit-Funktion s( t ) ! Wo
befindet es sich zum Zeitpunkt t 2 = 30 s, t3 = 40 s, t 4 = 50 s ? Zeichnen Sie die Orts -ZeitFunktion s( t ) !
(Siehe auch: Gnuplot-Datei kin_1d_bsp_1_geschw_const.plt)
Ein Körper startet zum Zeitpunkt t1 = −10 s bei x1 = 0,25 m und bewegt sich mit der
konstanten Geschwindigkeit v = 0,75 m/s . Stellen Sie die Orts -Zeit-Funktion x(t ) auf,
skizzieren Sie x(t ) ! Berechnen Sie die Position des Körpers zu den Zeiten
t 2 = 0 s, t3 = 1 s, t 4 = 2 s ! Berechnen Sie den Zeitpunkt t5 , zu dem der Körper x5 = 6,25 m
erreicht!
Ein Fahrzeug befindet sich um 15 Uhr bei x1 = 40 km und fährt mit konstanter
Geschwindigkeit. Um 15:15 Uhr ist es bei x2 = 25 km . Bestimmen Sie x(t ) ! Wann erreicht
das Fahrzeug x = 0 ?
Ein Fahrzeug A startet bei t = 0 bei x1 = 90 km mit der Geschwindigkeit v A = −30 km/h , ein
Fahrzeug B startet zum Zeitpunkt t1 = 14 h bei x = 0 mit der Geschwindigkeit vB = 50 km/h .
a) Skizzieren Sie die Bewegungen in einem x-t-Diagramm!
b) Bestimmen Sie die beiden Orts-Zeit-Funktionen x A (t ) und xB (t ) !
c) Wann kommt B bei x1 und wann kommt A bei x = 0 an?
d) Die beiden Fahrzeuge begegnen sich zum Zeitpunkt t2 am Ort x2 . Berechnen Sie t2 und x2!
Physik_1_1_Kinematik.doc, Prof. Dr. K. Rauschnabel, HHN, 21.10.2014 11:57
S.6/39
oder: Was - Hätten - Wir - Lernen – Können ?
Zusammenfassung
Die Geschwindigkeit ist die Steigung im Orts-Zeit-Diagramm ( s (t ), x(t ), K !)
Eine Bewegung mit konstanter Geschwindigkeit ergibt im Orts-Zeit-Diagramm eine Gerade
Wenn wir die (bis jetzt) konstante Geschwindigkeit als Funktion der Zeit auftragen, dann erhalten
wir natürlich lediglich eine waagrechte Linie.
Eine Bewegung mit konstanter Geschwindigkeit ergibt im Geschwindigkeits-Zeit-Diagramm
eine waagrechte Linie
konstante Geschwindigkeit
Orts-Zeit-Diagr.
s
konstante Steigung
im Orts-Zeit-Diagr.
t
Geschwindigkeits-Zeit-Diagr.
v
Gerade
s = v ⋅ t + s0
t
Eine große Geschwindigkeit ergibt eine steil
s
ansteigende Gerade,
eine kleine Geschwindigkeit eine flache Gerade,
Geschwindigkeit Null eine waagrechte Gerade.
groß
klein
Null
Negative Geschwindigkeit (fallende Gerade)
bedeutet, dass sich eine Objekt entgegen der von 0
uns gewählten positiven Achsenrichtung bewegt.
negativ t
(„rückwärts“)
Die Fläche unter der GeschwindigkeitsZeit-Linie ergibt die bis zum Zeitpunkt t v
zurückgelegte Strecke (ohne die Anfangsposition).
Fläche:
= v ⋅t
t
Physik_1_1_Kinematik.doc, Prof. Dr. K. Rauschnabel, HHN, 21.10.2014 11:57
S.7/39
1.1.1.2 Veränderliche Geschwindigkeit
In
der
Regel
verlaufen
Bewegungen höchsten zeitweise
oder
näherungsweise
mit
konstanter Geschwindigkeit. Z.B.
beschreiben die Skizzen
Folgenden Ablauf im Orts-Zeitbzw. Im Geschwindigkeits-ZeitDiagramm:
Ein Fahrzeug steht zunächst
am Startpunkt …
dann
beschleunigt
es
(Geschwindigkeit steigt), im
s-t-Diagramm ergibt sich eine
nach oben gekrümmte Kurve
anschließend fährt fas FZ
einige Zeit mit konst.
Geschw. (Gerade im s-tDiagramm, waagerechte Linie
im v-t-Diagramm)
dann bremst es, v sinkt, die
s-t-Kurve ist nach unten
gekrümmt
… bis v=0 erreicht wird und
das FZ am Ziel steht
(s=const.)
s
Orts-Zeit-Diagramm
Bremsen
steht (am
Zielpunkt)
Fahrt mit konst.
Geschw.
steht (am
Startpunkt)
Beschl.
t
Geschwindigkeits-Zeit-Diagramm
v
t
Eine Bewegung mit veränderlicher Geschwindigkeit zeigt sich also im Orts-Zeit-Diagramm als
(gekrümmte) Kurve.
Bei einer Bewegung mit veränderlicher
veränderliche Geschwindigkeit
Geschwindigkeit müssen wir (wie übrigens
bei jeder anderen zeitabhängigen Größe
Geschwindigkeit
Momentane Geschwindigkeit
auch) zwischen dem Momentanwert und dem Mittlere
Gesamtweg
Ortsveränderung Δs
v(t ) =
=
Durchschnittswert unterscheiden. Man kann v =
Gesamtzeit
Δt
Zeitintervall
z.B. durchaus in einer Stunde nur 30 km
zurücklegen und trotzdem kurze Zeit
60 km/h fahren.
welches?
Die mittlere Geschwindigkeit (Durchschnittgeschwindigkeit) ist der Quotient von gesamtem
zurückgelegten Weg und Gesamtzeit.
Die Momentangeschwindigkeit dagegen ergibt sich aus der Wegstrecke, die in einem (kurzen)
Zeitintervall3 zurückgelegt wird.
3
Die Frage, wie klein das Zeitintervall sein muss, behandeln wir weiter unten.
Physik_1_1_Kinematik.doc, Prof. Dr. K. Rauschnabel, HHN, 21.10.2014 11:57
S.8/39
Beispiele:
Ein Fahrradtachometer misst das (kurze) Zeitintervall für eine Radumdrehung, er bestimmt
damit (näherungsweise) die Momentangeschwindigkeit
Bei der Verkehrsüberwachung mit Radar (Dopplereffekt),
„Laserpistole“, Kontaktschleifen oder (dreifach-) Lichtschranke wird
ebenfalls die Momentangeschwindigkeit ermittelt. Wer die Kamera
rechtzeitig sieht und vor der Messung bremst, der kann seine
Momentangeschwindigkeit u.U. rechtzeitig verringern …
Neuere Überwachungssysteme in (GB, A, I, NL, …) bestimmen die Zeit für eine längere
Strecke mit zwei Kameras und automatische Kennzeichenerkennung. Sie berechnen daraus
die mittlere Geschwindigkeit kurzfristiges Bremsen hilf dann nichts mehr …
Übungsbeispiel:
Ein Fahrzeug fährt jeweils …
a) die Hälfte der Zeit
b) die Hälfte der Strecke
mit der Geschwindigkeit v1 = 40 km/h bzw. v2 = 80 km/h
Berechnen Sie jeweils die mittlere Geschwindigkeit v !
Mittlere Geschwindigkeit v
(z.B. bei einer Bewegung mit „stückweise konstanter Geschwindigkeit)
Wir betrachten eine Bewegung, bei der die Geschwindigkeit jeweils für eine gewisse Zeitspanne
(bzw. auf einem gewissen Weg) konstant bleibt. Selbstverständlich ist dies nicht exakt realisierbar,
da die Geschwindigkeit sich nicht augenblicklich ändern kann. Dies Beschreibung stellt eine
Vereinfachung dar, die in vielen Fällen zulässig ist. Voraussetzung ist, dass die Beschleunigungsbzw. Bremsphasen, bei denen sich die Geschwindigkeit ändert, sehr kurz sind.
Es ist hier einfacher, wenn wir die einzelnen Zeitintervalle4 mit t1 , t 2 , K und die einzelnen Strecken4
mit s1 , s2 , K bezeichnen. Für das Intervall Nummer i (i = 1K N ) gilt dann:
Zeit Geschw.
Weg
t1
v1
s1 = v1 ⋅ t1
1)
v2
s 2 = v2 ⋅ t 2
2) t 2
M
M
M
M
i
ti
vi
si = vi ⋅ ti
M
M
M
M
N tN
vN
sN = vN ⋅ t N
v(t)
v2
v1
v
v3
s1
s2
s3
t1
t2
t3
4
Also ti bezeichnet hier die Zeitdauer für die einzelne Teilstrecke (nicht den Zeitpunkt) und die si bezeichnet die
X Ohne diese Definition müssten wir in den
einzelne Teilstrecke (nicht die Koordinate bzw. Position)!
nachfolgenden Gleichungen umständlicher (t2-t1) statt t2 ; (s2-s1) statt s2 etc. schreiben!
Physik_1_1_Kinematik.doc, Prof. Dr. K. Rauschnabel, HHN, 21.10.2014 11:57
S.9/39
t
Beachten Sie: Die Wegstücke s1 , s2 , K entsprechen im v-t-Diagramm den Flächen unter dem jeweiligen
Kurvenstücken (durch unterschiedliche Schraffur gekennzeichnet). Die gesamte Fläche , also die Summe
s
dieser Teilstrecken, ist die Gesamtstrecke s ges . Die mittlere Geschwindigkeit ergibt sich aus v = ges . Also
t ges
muss auch die Fläche v ⋅ t ges unter der waggerechten Linie (bei v ) die Gesamtstrecke s ges ergeben!5
Es ist also
v=
s ges
t ges
s(t)
s + s + s + K v1t1 + v2t 2 + v3t3 + K
= 1 2 3
=
t1 + t 2 + t3 + K
t1 + t 2 + t3 + K
s3
s2
Im Weg-Zeit-Diagramm wird eine Bewegung mit der
mittleren Geschwindigkeit durch eine Gerade
dargestellt, die nach der gleichen Zeit beim gleichen
Weg endet wie die eigentliche Bewegung.
s = v ⋅t
s1
t1
Mittlere Geschwindigkeit:
v=
t2
s ges
t3
[Gl.1.1. 4. ]
t ges
N
für stückweise konstante Geschwindigkeit: v =
s ges
t ges
=
∑v ⋅t
i =1
N
i
∑t
i =1
i
i
Dies bedeutet: Die mittlere Geschwindigkeit ergibt sich als gewichtetes Mittel6: Jeder Wert wird
mit einem „Wichtungsfaktor“ multipliziert, das Ergebnis wird aufsummiert und am Schluss durch
die Summe der Wichtungsfaktoren dividiert. Beim zeitlichen Mittel sind die Wichtungsfaktoren
durch die jeweiligen Zeitintervalle gegeben.
5
Dies gilt allgemein: Den Mittelwert einer zeitabhängigen physikalische Größe „X(t)“ (z.B. Spannung, Temperatur,
Druck, Beschleunigung, …) erhält man, indem man im X(t) - t -Diagramm eine waagerechte Linie einzeichnet, die die
gleiche Fläche zur t-Achse einschließt.
6
Vergl. z.B. die Berechnung eines gewichteten Notendurchschnitts:
Summe ( Note * Wichtungsfaktor) / Summe (Wichtungsfaktoren)
Physik_1_1_Kinematik.doc, Prof. Dr. K. Rauschnabel, HHN, 21.10.2014 11:57
S.10/39
t
Übung:
Welche Bewegung beschreiben die folgenden v-t-Diagramme? Wie groß ist hier jeweils mittlere
Geschwindigkeit v ?
a)
c) s1 = 23 s , s2 = 13 s
b)
v(t)
v(t)
v(t)
v1
v1
v1
t1
t
t1
t
t1
e) s1 = s2 = 12 s
d)
v(t)
t
f) s1 = 54 s , s2 = 15 s
v(t)
v(t)
v2
t2
v1
2v1
v1
v1
t1
t
t1
t2
t1
t
t2
t
Momentane Geschwindigkeit v(t )
Es wurde weiter oben schon gesagt, dass sich die momentane Geschwindigkeit v(t ) ergibt als:
v(t )=
Ortsveränderung Δs
=
Zeitintervall
Δt
Dabei ist Δt ein „genügend kleines“ Zeitintervall. Wie klein muss Δt sein ?
1) Wie groß ist die
Momentangeschwindigkeit bei t1 = 20 s ?
Weg-Zeit-Diagramm
0.15
s(t)
0.10
0.05
0.00
s /m
Wir betrachten dazu als
Beispiel einen
Bewegungsvorgang, bei
dem sich ein Körper von
x = 0 aus mehrfach
zwischen x > 0 und
x < 0 hin und her
bewegt und seine
Geschwindigkeit
dauernd ändert.
-0.05
-0.10
-0.15
-0.20
-0.25
0
10
20
30
Zeit t /s
40
Physik_1_1_Kinematik.doc, Prof. Dr. K. Rauschnabel, HHN, 21.10.2014 11:57
50
60
S.11/39
Weg-Zeit-Diagramm
0.15
0.05
v = ( 0.04389 m ) / (
5 s) = 0.008778 m/s
0.00
-0.05
-0.10
-0.15
-0.20
-0.25
3) Wir vergrößern einen
Ausschnitt aus dem
Diagramm, so dass wir
nur noch den Zeitraum
von 17,5 s bis 22,5 s
sehen …
0
10
20
30
Zeit t /s
40
50
60
Weg-Zeit-Diagramm
0.110
s(t)
0.105
0.100
v = ( 0.007979 m ) / (
0.095
1 s) = 0.007979 m/s
0.090
s /m
Mit Δt = 1 s ergibt sich
v = 7,979 mm/s
s(t)
0.10
s /m
2) Wir nehmen zunächst
ein Zeitintervall
von Δt = 5 s , betrachten
also den Zeitraum von
17,5 s bis 22,5 s. Die
Differenz zwischen
Anfangs- und
Endposition in dieser
Zeit ist 43,89 mm und
aus dem
Steigungsdreieck
ergibt sich die Geschw.
zu 8,778 mm/s – allerdings bewegt sich der
Körper völlig anders!
0.085
0.080
…
0.075
0.070
0.065
0.060
17.5
18
18.5
19
4) …
19.5
20
20.5
Zeit t /s
21
21.5
22
22.5
Weg-Zeit-Diagramm
Mit Δt = 0,2 s
ergibt sich
0.109
v = 7,945 mm/s
0.107
Jetzt ist der Unterschied
zwischen der wirklichen
Bewegung (blaue Kurve)
und der Hypotenuse des
Steigungsdreiecks (rote
Linie) kaum mehr zu
sehen …
0.106
s(t)
s /m
0.108
0.105
v = ( 0.001589 m ) / (
0.104
0.2 s) = 0.007945 m/s
0.103
0.102
0.101
0.100
19.5
19.6
19.7
19.8
19.9
20
20.1
Zeit t /s
20.2
20.3
Physik_1_1_Kinematik.doc, Prof. Dr. K. Rauschnabel, HHN, 21.10.2014 11:57
20.4
20.5
S.12/39
4) Die Vergrößerung
zeigt aber noch kleine
Abweichungen, mit
Δt = 0,05 s
ergibt sich fast der
gleiche Wert wie im
vorherigen Schritt,
v = 7,944 mm/s
Weg-Zeit-Diagramm
0.1060
s(t)
0.1058
0.1056
0.1054
s /m
0.1052
0.1050
v = ( 0.0003972 m ) / (
0.05 s) = 0.007944 m/s
0.1048
0.1046
0.1044
0.1042
19.9
5) …
mit Δt = 0,02 s
ergibt sich wieder
20
Zeit t /s
20.05
20.1
Weg-Zeit-Diagramm
0.10545
s(t)
0.10540
v = 7,944 mm/s ,
0.10535
0.10530
s /m
also (auf 4 Dezimalen
genau) der gleiche Wert
wie oben!
19.95
0.10525
0.10520
0.10515
0.10510
v = ( 0.0001589 m ) / (
0.02 s) = 0.007944 m/s
0.10505
0.10500
19.975 19.98 19.985 19.99 19.995 20 20.005 20.01 20.015 20.02 20.025
Zeit t /s
v = 7,944 mm/s
Weg-Zeit-Diagramm
0.10530
s(t)
0.10528
0.10526
0.10524
0.10522
s /m
6) In der letzten Vergrößerungsstufe (mit
Δt = 0,02 s ) sieht man
praktisch keinen
Unterschied mehr
zwischen der geraden
Linie aus dem
Steigungsdreieck und der
blauen , (ursprünglich
„krummen“) Linie der
Bewegung.
0.10520
0.10518
0.10516
0.10514
0.10512
0.10510
v = ( 0.0001589 m ) / (
19.99
19.995
0.02 s) = 0.007944 m/s
20
Zeit t /s
20.005
Physik_1_1_Kinematik.doc, Prof. Dr. K. Rauschnabel, HHN, 21.10.2014 11:57
20.01
S.13/39
Beachten Sie:
Wir haben in allen Diagrammen immer die gleiche Funktion s(t) gezeichnet!
Bei „genügend starker Vergrößerung“ (entspricht „genügend kleinem“ Δt ) wird aus der
gekrümmten Linie näherungsweise eine Gerade. Bei einer Geraden ist aber die Steigung
unabhängig von der Größe des Δt -Intervalls!
Wenn wir die Steigung einer gekrümmten Kurve an einem bestimmten Punkt bestimmen
wollen, dann müssen wir Δt so klein machen, das die Kurve praktisch mit der Hypotenuse
(also der „schrägen Seite“) des Steigungsdreiecks zusammenfällt!
Dies geht („Satz aus Mathematik“) wenn …
•
die betrachtete Funktion s (t ) stetig ist (keine „Lücken“ hat und „keine Sprünge macht“)
Dies ist in der Physik (im Gegensatz zur Mathematik) aber eigentlich kein Problem: Ein Körper ist zu
jedem Zeitpunkt irgendwo und er kann nicht in Null Zeit von A nach B kommen! Also sind physikalisch
sinnvollen Orts-Zeit-Funktionen s(t) immer stetig!
•
und „keine Ecken hat“ (siehe weiter unten!)
Am obigen Beispiel sehen wir: Die Momentangeschwindigkeit v(t) ergibt sich als
Tangentensteigung der Weg-Zeit-Kurve s(t) beim Zeitpunkt t. Mathematisch bedeutet das, wir
habe durch de immer kleiner werdenden Δt -Intervalle versucht, durch Zahlenrechnung
(numerisch) den Grenzwert (Limes) von Δs Δt für den Fall dass Δt gegen Null geht zu
berechnen. Kürzer lässt sich das in einer mathematischen Formel ausdrücken:
Steigung
Δs d s
=
= s ′( t ) = s&( t )
Δt → 0 Δt
dt
v( t ) = lim
[Gl.1.1.5.]
WHWL K ?
Die Geschwindigkeit ist die "1. Ableitung des Orts nach der Zeit":
v( t ) =
ds
dt
Ableiten (im Sinne von die Steigung einer Funktion berechnen) wird auch differenzieren genannt.
Es gibt verschiedene Möglichkeiten, die mathematische Operation des „Nach-der-ZeitDifferenzierens“ zu scheiben:
Aus der Schulmathematik sicher bekannt: mit einem Strich ( ′ ): s′(t )
Nachteil: Es wird nicht deutlich, dass nach der Zeit differenziert wird (Wenn man nur Funktion y(x) nach x differenziert, ist
das kein Problem. In der Physik gibt es aber oft z.B. Funktionen x(t)), bei denen dann eben t die unabhängige Variable ist!
Wenn man speziell darauf hinweisen möchte, dass nach der Zeit differenziert werden muss,
dann schreibt man statt dem Strich einen Punkt ( & ): s& (t )
Nachteil: Bei handschriftlichen Notizen (z.B. auf einer schlecht geputzten Tafel) könnte ein Pünktchen schon mal übersehen
werden oder unbeabsichtigt an der falschen Stelle auftauchen!
Zu bevorzugen ist deshalb die Schreibweise als „Differentialquotient“:
Diese Schreibweise erinnert an die Herkunft: Aus den
werden durch den Grenzübergang die so genannten
v (t ) =
ds
dt
Differenzen Δs, Δt
Differentiale d s und d t .
Beachten Sie: Das „d“ ist dabei eine „Rechenvorschrift“, es bildet mit dem „s“ bzw. „t“ eine
Einheit (und darf keinesfalls getrennt oder gar gekürzt werden).
Physik_1_1_Kinematik.doc, Prof. Dr. K. Rauschnabel, HHN, 21.10.2014 11:57
S.14/39
An dieser Stelle wird nicht weiter auf die Berechnung der Ableitung eingegangen. Dies können Sie im Fach
Mathematik lernen (oder haben es schon gelernt). Fall Sie beim Differenzieren der mathematischen Grundfunktionen
(Potenzen, sin, cos, log, exp, …), bei zusammengesetzten Funktionen, bei der Anwendung von Produkt-, Quotientenoder Kettenregel etc, noch Probleme haben, dann sollten Sie dieses Kapitel dringend mit Hilfe eines guten Mathebuchs
(z.B. Papula) nacharbeiten.
Merke: Sie müssen das können, nicht Ihr Taschenrechner!
Es bleibt noch zu klären …
•
Gibt es Orts-Zeit-Funktionen s(t) , die man nicht differenzieren kann?
Nicht differenzieren kann man z.B. Funktionen, die eine Sprung machen oder die an einer Stelle
nicht definiert sind. Darüber müssen wir uns in Physik keine Sorgen machen: Ein Körper kann nicht
in Null Zeit von A nach B springen, außerdem befindet er sich zu jeder Zeit irgendwo.
•
Gibt es physikalisch sinnvolle Orts-Zeit-Funktionen s(t) "mit Ecken"
(Mathe : nicht stetig differenzierbare Funktionen) ?
Auch Ecken in s(t)-Funktionen sind "künstlich", d.h. sie sind nur ein mathematisches
Problem, auf Grund eines zu groben physikalischen Modells! An einer „Ecke“ würde sich die
Geschwindigkeit augenblicklich (in Null Zeit!) verändern. Dies ist bei der Bewegung eines
massebehafteten Körpers aber nicht möglich. Geschwindigkeitsveränderungen benötigen auf
Grund der Masseträgheit immer etwas Zeit, da sonst unendliche Kräfte nötig wären!
Sinnvolle Weg-Zeit-Funktionen sind also stetig-differenzierbar.
h
Wenn in einem Modell nicht stetig differenzierbare Weg-ZeitFunktionen auftauchen, so bedeutet das nur, dass das Modell
mehr der weniger stark vereinfacht wurde.
t
Beispiel: Wir beschreiben, wie eine Stahlkugel auf eine harte
Steinplatte fällt und dort abprallt. Beim Auftreffen auf der Platte
ändert sich in kürzester Zeit das Vorzeichen der
Geschwindigkeit von „-„ nach „+“. In einem ersten, groben
Modell des Vorgang hat die Weg-Zeit-Funktion an dieser Stelle
eine „Ecke“. Abhilfe: Das Modell muss verbessert werden, in
dem die Elastizität der Kugel berücksichtigt wird. Durch die
elastische Verformung der Kugel wird diese (genauer: ihr
Schwerpunkt!) zunächst auf Geschwindigkeit Null gebremst und
anschließend wieder nach oben beschleunigt.
Übung:
1.
Skizzieren Sie für obiges Beispiel (Kugel fällt auf Stahlplatte) die Weg-Zeit-Funktion und
die Geschwindigkeits-Zeit-Funktion!
2.
Mathe-Übung für Freaks: Die Weg-Zeit-Funktion des einführenden Beispiels (ab Seite 14)
ist: s (t ) = sin (ωt ) ⋅ e -λt ⋅ (a + bt + ct 2 )
mit den Konstanten: ω = 0,2 s -1 , λ = 0,2 s -1 , a = 0,01 m, b = 0,02 m/s, c = −0,02 m/s 2
Berechnen Sie die Geschwindigkeit zum Zeitpunkt t1 = 20 s !
(Das Erg. ist v = 7,944 mm/s - vergleiche numerische Berechnung/Digramme!)
Physik_1_1_Kinematik.doc, Prof. Dr. K. Rauschnabel, HHN, 21.10.2014 11:57
S.15/39
1.1.2 Beschleunigung
Wenn die Geschwindigkeit nicht konstant bleibt, dann sprechen wir von einer beschleunigten
Bewegung. Dabei kann die Geschwindigkeit größer oder auch kleiner werden.
Beschleunigte Bewegung
(+) bzw.
Geschwindigkeit ändert sich !
Die Geschwindigkeit v ist also eine Funktion der Zeit t:
(-)
v=v(t)
1.1.2.1 Konstante Beschleunigung (Gleichförmig beschleunigte Bewegung)
Wir betrachten als Beispiel zunächst wieder eine lineare Funktion v(t ) , d.h. in gleichen
Zeitintervallen ändert sich die Geschwindigkeit um den gleichen Betrag. Zusätzlich nehmen wir
zunächst an, dass die Geschwindigkeit bei t = 0 Null ist.
v
a
Steigungsdreieck:
v
a=—
t
0
Fläche
0
t
Steigung im Geschwindigkeits-Zeit-Diagramm
= a ⋅t
t
Fläche im Beschleunigungs -Zeit-Diagramm
Beschleunigung
Geschwindigkeit
Als nächstes Beispiel betrachten wir eine Bewegung mit konstanter Beschleunigung, aber mit einer
Anfangsgeschwindigkeit v0 .
Es ergibt sich wieder eine lineare Funktion v(t ) , die überall die gleiche Steigung hat. Die Fläche im
Beschleunigungs-Zeit-Diagramm ergibt sich wie vorher zu a ⋅ t . Sie berücksichtigt also nur die
Veränderung der Geschwindigkeit seit Beginn (t = 0 ) und NICHT die Anfangsgeschwindigkeit v0 !.
Fläche im a-t-Diagramm = a ⋅ t = v(t ) − v0
v
v (t ) = a ⋅ t + v0
Δv
v0
0
Δt
Steigungsdreieck:
Δv
a = ——
Δt
v(t ) = a ⋅ t + v0
a
Fläche
t
Steigung im Geschwindigkeits-Zeit-Diagramm
Beschleunigung
= a ⋅ Δt
Δt
Fläche im Beschleunigungs -Zeit-Diagramm
Veränderung der Geschwindigkeit im
betrachteten Zeitintervall
Physik_1_1_Kinematik.doc, Prof. Dr. K. Rauschnabel, HHN, 21.10.2014 11:57
S.16/39
Δv
ist, dann gilt umgekehrt Δv = a ⋅ Δt . Dies ist wieder die Fläche im
Δt
Beschleunigungs-Zeit-Diagramm. Die Veränderung der Geschwindigkeit im betrachteten
Zeitintervall ergibt sich also als Fläche unter der a(t)-Linie. Ist a konstant, dann ist das die
Fläche eines Rechtecks, nämlich a ⋅ Δt . Wenn bei t = 0 die Geschwindigkeit Null ist, dann
gilt einfach v = a ⋅ t . Mit Anfangsgeschwindigkeit v(0 ) dagegen muss beachtet werden, das
die Fläche a ⋅ t nur die Veränderung der Geschwindigkeit anzeigt, es ist also v − v(0 ) = a ⋅ t .
Wenn a =
Noch etwas allgemeiner können wir eine
Bewegung mit konstanter Beschleunigung
betrachten, die zu einem Zeitpunkt t1 mit der
Geschwindigkeit v1 beginnt. Auch hier ist
das Wesentliche, dass die Veränderung der
Geschwindigkeit
proportional
zur
vergangenen Zeit ist: (v − v1 ) ~ (t − t1 )
Die Proportionalitätskonstante ist hie die
Beschleunigung a. Für v(t ) gibt es dann
wieder
verschiedene
Arten
der
mathematischen Beschreibung:
(v − v1 ) = a ⋅ (t − t1 )
⋅ t + (v1 − at1 )
v = a{
1
424
3
abh. von t!
konst.!
v = a ⋅ t + v0
Ein v(t) – Diagramm mit konstanter Steigung
(also eine Gerade!) beschreibt also eine
Bewegung mit konstanter Beschleunigung.
An der Geradensteigung kann dann die
Beschleunigung abgelesen werden:
v
Δv
α
v1
Δt
Start
v0
t
t1
Steigungs-Dreieck:
Δv v − v1
=
a=
Δt t − t1
[Gl.1.1.6.]
Beschleunigung …
groß
v
klein
Null
0
negativ t
(„Verzögerung“)
WHWLK ?
Die (momentan-) Beschleunigung a ist die Steigung im v(t) - Diagramm!
Die Fläche im a(t)-Diagramm ergibt die Veränderung der Geschwindigkeit im betrachteten
Zeitintervall
Physik_1_1_Kinematik.doc, Prof. Dr. K. Rauschnabel, HHN, 21.10.2014 11:57
S.17/39
1.1.2.2 Veränderliche Beschleunigung
Hier müssen wir (wie bei der Geschwindigkeit, vergleiche mittlere Geschwindigkeit und
Momentangeschwindigkeit) zwischen Momentanwert und Mittelwert der Beschleunigung
unterscheiden. Wir betrachten als Beispiel eine Bewegung, bei der die Beschleunigung von einem
postitiven Anfangswert linear auf Null absinkt. Die Geschwindigkeit wächst dann stetig an, aber die
Steigung der Geschwindigkeits-Zeit-Kurve nimmt ständig ab.
v(t)
momentane
Beschleunigung
= Tangentensteigung!
mittlere
Beschleunigung
v(t) – v(0)
a = ————
t
0
t1
t
Steigung der Tangente im
Geschwindigkeits-Zeit-Diagramm
momentaneBeschleunigung
a(t)
a(t1)
a
0
t
t1
Fläche im Beschleunigung -Zeit-Diagramm
Veränderung der Geschwindigkeit im
betrachteten Zeitintervall
waagerechte Linie mit gleicher Fläche
mittlere Beschleunigung
Wir hatten gefunden, dass sich die (momentane) Geschwindigkeit als Ableitung des Orts nach der
Zeit ergibt (vergleiche Gl.1.1.5. , Seite 14). In der gleichen Weise bestimmen wir jetzt die
momentane Beschleunigung. Dazu berechnen wir a zunächst als Δv Δt , verkleinern dann das
Zeitintervall Δt und erhalten schließlich im Grenzfall Δt → 0 die Ableitung von v nach t :
Die Beschleunigung ist die Steigung im v(t) – Diagramm und wird berechnet als
"1. Ableitung der Geschwindigkeit nach der Zeit"
a(t ) = lim
Δt →0
Δv d v
=
= v′(t ) = v& (t )
Δt d t
[Gl.1.1.7.]
ds⎞
⎛
Berücksichtig man, dass v schon die erste Ableitung von s nach t ist ⎜ v(t ) =
⎟ , so ergibt sich:
dt ⎠
⎝
Die Beschleunigung ist die 1. Ableitung der Geschwindigkeit nach der Zeit oder
die "2. Ableitung des Orts nach der Zeit"
„d-zwei nach
d-t-Quadrat“
⎧d s ⎫
d⎨ ⎬
dv
d2 s
dt
[Gl.1.1.8.]
a(t ) =
= ⎩ ⎭ =
= &s&
2
dt
dt
dt
Physik_1_1_Kinematik.doc, Prof. Dr. K. Rauschnabel, HHN, 21.10.2014 11:57
S.18/39
Bei Bewegungen mit nicht konstanter Beschleunigung 7 ergibt sich im v(t) – Diagramm
keine Gerade und im a(t) – Diagramm keine waagerechte Linie (Konstante) mehr. Die
grundlegende Beziehung zwischen Geschwindigkeit und Beschleunigung bleibt aber erhalten:
Die (momentan-) Beschleunigung ist die Veränderung der Geschwindigkeit pro Zeit,
also die Steigung im v(t) – Diagramm
Die Fläche unter der a(t) –Kurve
Änderung der Geschwindigkeit
∗ Zeit ) ergibt die Geschwindigkeit bzw.
(also:
Zeit
genauer die Veränderung der Geschwindigkeit im betrachteten Zeitraum.
1.1.2.3 Allgemeiner Zusammenhang zwischen
Ort, Geschwindigkeit und Beschleunigung
Ort
Geschwindigkeit
Beschleunigung
!! jeweils differenzieren !!
Wie erhalten wir d. Geschwindigk. v aus d. Beschleunigung a?
Wie erhalten wir d. Ort s aus d. Geschwindigkeit v?
Beschleunigung
Geschwindigkeit
∫ a d t = v( t)
Ort
!! jeweils integrieren !!
∫ v d t = s( t)
7
In der Praxis sind Bewegungen mit konstanter Beschleunigungen eher die Ausnahme (auch wenn in der Schule mesit
nur dieser einfache Fall behandelt wird). Sanftes Anfahren und Abbremsen eines KFZ z.B. bedeutet immer eine
zeitabhängige, sich stetig ändernde Beschleunigung.
Physik_1_1_Kinematik.doc, Prof. Dr. K. Rauschnabel, HHN, 21.10.2014 11:57
S.19/39
WHWL K ?
W e g ,
O r t ,
Orts-Veränderung ⁄ Zeit ergibt
Geschwindigkeit
o Steigung berechnen!
o Ableitung: v =
ds
dt
P o s i t i o n
Geschwindigkeit * Zeit ergibt
Orts-Veränderung
o Orts-Veränderungen
aufsummieren,
Fläche berechnen
o Integral: s = ∫ v d t
G e s c h w i n d i g k e i t
Geschwindigk.-Veränderung ⁄ Zeit
ergibt Beschleunigung
o Steigung berechnen!
o Ableitung: a =
dv
dt
Beschleunigung * Zeit ergibt
Geschwindigkeits -Veränderung
o Geschwindigkeits Veränderungen aufsummieren,
Fläche berechnen
o Integral: v = ∫ a d t
B e s c h l e u n i g u n g
Physik_1_1_Kinematik.doc, Prof. Dr. K. Rauschnabel, HHN, 21.10.2014 11:57
S.20/39
…………………………………………………………………………………………………..
…… Beispiele, konst a zuerst, auch ohne Integralrechnung (Dreiecksfläche!), Dreiecks-Besch
einbauen, mit Gnuplot-Diagr.!.
Übungsaufgaben V(t) Diagr., a ablesen, s-Ablesen,
Wertepaare geben, Funktion aufstellen
Einfache Fkt. angeben, diff/integrieren
Polynom, sin, cos, exp, ln, sqrt ….
…………………………………………………………………………………………………..
Beispiele
a. Masse schwingt an Feder:
s( t ) = A ⋅ sin(ωt )
0
m
geg.: Amplitude A= 10 cm
s(t)
Frequenz
f
bzw.
Kreisfrequenz ω = 2π ⋅ f = 10 1 s
v(t)
schwingende Masse
0,1
s/m
0,05
s(t)
0
-0,05
-0,1
0
0,2
0,4
0,6
t/s
0,8
1
Sie
die Geschwindigkeit v(t) als Funktion der Zeit sowie die
Bestimmen
Beschleunigung a(t) als Funktion der Zeit! Berechnen Sie die Geschwindigkeit zum
Zeitpunkt
t1 = 0.3 s
,
die
Beschleunigung
zum
Zeitpunkt
t2 = 0.3 π s (= 0.942478 s) sowie den Maximalwert der Geschwindigkeit und
Beschleunigung!
Physik_1_1_Kinematik.doc, Prof. Dr. K. Rauschnabel, HHN, 21.10.2014 11:57
S.21/39
Nehmen Sie Ihr Ergebnis für a(t) und bestimmen Sie daraus wieder v(t) und s(t)!
Zeichnen Sie die Funktionen s(t), v(t), a(t) (oder lassen Sie dies Ihren Si-Knecht
machen) !
geg.: Geschwindigkeit: v( t ) = v 0 ⋅ e − λt mit
b. "Exponentiell-gebremste Bewegung":
10
8
6
4
2
0
exp.-ged.-Bewegung
v / ms-
v0 = 10 m/s u. λ = 0.5 1/s
Bestimmen Sie Beschl.
a(t) und Weg s(t)! (bei t =
0 sei s(0) = 0 !)
0
⇔
1
2
3
4 5
t/s
6
7
8
gleichförmig beschleunigte
Bewegung
a=
dv
= const.
dt
v( t ) = ∫ a d t
=?
s( t ) = ∫ v( t ) d t
=?
Wichtigste Anw.:
Beschl. im Schwerefeld der Erde (Wurf, freier Fall)
a = g = 9.81 m/s2
[Gl.1.1.9.]
(nur in der Nähe der Erdoberfläche!!!!)
a = const.
Physik_1_1_Kinematik.doc, Prof. Dr. K. Rauschnabel, HHN, 21.10.2014 11:57
S.22/39
v( t ) = ∫ a d t = a ⋅ t + v
0
s( t ) = ∫ v( t ) d t = 1 a ⋅ t 2 + v t + s
2
0
0
"unbestimmte Integrale"
⇒
bei
jeder
"Integrationskonstante" !
⇒ v0 , s0
Bedeutung:
Integration
eine
Geschw. u. Ort "zum Zeitp. t=0"
Bestimmung: aus Anfangsbedingungen
einfachstes Beispiel:
bei t=0 sei gegeben v(0) = 0
⇒
also einfach …
sonst:
Anf.-Bed. in
und
v0 = 0
s(0) = 0
s0 = 0
s( t ) = 12 a ⋅ t 2
bzw.
einsetzen, v0 , s0 bestimmen!
Kinematik•
•
Skizze anfertigen, Koordinatensystem u.
Wo ist für Sie s=0 ? Welche Richtung ist + ?
Richtungen
Nullpunkt
der
Zeitachse
Welchen Zeitpunkt bezeichnen Sie als t=0 ?
Beschleunigung best.!
festlegen!
festlegen!
allgemeine Formel
Bsp.: gleichf. Beschl.
a( t ) =K
a = const.
1.
Integration v( t ) = ∫ a d t =K
eine Integrationsk.
v( t ) = a ⋅ t + v
0
2.
Integration s( t ) = ∫ v( t ) d t =K
eine weitere Integr.-konst.
s( t ) = 1 a ⋅ t 2 + v t + s
2
0
0
Anfangsbedingungen
aufschreiben
( )
v( t ) = v
2
2
t : st =s
1
1
1
t :
2
t = 0: s( 0) = 0 ; v( 0) = 0
Physik_1_1_Kinematik.doc, Prof. Dr. K. Rauschnabel, HHN, 21.10.2014 11:57
S.23/39
()
( )
in
u.
einsetzen, s t = s
1
1
Integrationskonst. best.
vt =v
2
2
Orts-/Geschw.-Zeit-Bez.
s( t ) =K
⇒ s =K
0
s = 0;v = 0
0
0
⇒ v =K
0
v( t ) =K
E i n Koordinatensystem - e i n e Zeit t !
s( t ) = 1 a ⋅ t 2
2
v( t ) = a ⋅ t
sonst :
______________________________________________________________________
Oder … mit bestimmten Integralen
----------------------------------------------------------------------------------------------------------Mathe:
unbestimmtes Integral
bestimmtes Integral
⇒
∫ f ( x ) d x = F( x ) + C
b
∫ f ( x ) d x = F ( b ) − F( a)
a
keine unbest. Konstante C!
[Gl.1.1.10.]
[Gl.1.1.11.]
☺
-----------------------------------------------------------------------------------------------------------
Physik_1_1_Kinematik.doc, Prof. Dr. K. Rauschnabel, HHN, 21.10.2014 11:57
S.24/39
Anfangsbedingungen in bestimmtes Integral einsetzen …
Bsp.:
()
( )
a=const. ; v t = v ; s t = s
1
1
1
1
( )
v( t ) − v = a ⋅ t − t
1
1
( )
2
s( t ) − s = 1 a ⋅ t − t
+ v ⋅ t − t (***)
1
1
1
1 2
(
t
v( t ) − v t = ∫ a(t ′) d t ′
1
t
1
)
(
t
s( t ) − s t = ∫ v(t ′) d t ′
1
t
1
)
(
)
(***) ausmultiplizieren, umstellen …Ergebnis kennen wir schon!
gleiches Ergebnis!
¿ einfacher ?
Bem: Darstellung als K(t − t1 ) +K(t − t1 ) +K wie bei (***) ist dann besonders sinnvoll u.
übersichtlich, wenn Ort und/oder Geschwindigkeit nicht bei t=0 sondern bei t = t1 bekannt
sind und/oder die Beschleunigung ab t = t1 wirkt!
2
Physik_1_1_Kinematik.doc, Prof. Dr. K. Rauschnabel, HHN, 21.10.2014 11:57
S.25/39
Beispiel
„Dreiecks-Beschleunigung“
Wir betrachten ein „sanftes Anfahren“, d.h. ein Körper soll auf eine Endgeschwindigkeit
beschleunigt werden, ohne dass die Beschleunigung a (t ) „Sprünge“ macht. Eine einfache
Möglichkeit dafür ist, dass a (t ) innerhalb der Zeit t1 linear von Null auf die
Maximalbeschleunigung a0 anwächst, und dann bis zum Zeitpunkt 2t1 wieder linear bis auf
Null absinkt. Es sei v(0 ) = 0 und x(0 ) = 0 .
Beschleunigung
Damit erhält man für die Beschleunigung (mit Fallunterscheidung für die zwei Phasen):
a(t)
a0
⎧ a0
⎪⎪ t ⋅ t
a(t ) = ⎨ 1
a
⎪a0 − 0 ⋅ (t − t1 )
⎪⎩
t1
0 ≤ t ≤ t1
(I)
t1 < t ≤ 2t1
(II)
(I)
0
(II)
t1
2 t1
t
Anmerkungen:
Fall I: a (t ) soll mit t linear von Null an anwachsen. Damit ergibt sich für Fall I eine
a
a
Ursprungsgerade mit Steigung 0 , also aI (t ) = 0 ⋅ t .
t1
t1
Fall II: Es gibt (wie meistens) mehrere Wege, um zur Beschleunigung im Fall II zu kommen:
1. Verlängern Sie die fallende Gerade rückwärts bis zu t = 0 , der Achsenabschnitt ist
a
2a0 , die Steigung vom Betrag wie bei I, jedoch negativ, also: aII (t ) = 2a0 − 0 ⋅ t .
t1
2. Gehen Sie vom Punkt bei t1 (Maximum) aus. Dort ist a = a0 . Ab t = t1 fällt a (t ) mit
a
a
der (negativen) Steigung − 0 . Also ist aII (t ) = a0 − 0 ⋅ (t − t1 )
t1
t1
3. Gehen Sie vom Punkt bei 2t1 (Nulldurchgang) aus. Dort ist a = 0 . Vor t = t1 fällt a (t )
a
a
mit der (negativen) Steigung − 0 . Also ist aII (t ) = 0 − 0 ⋅ (t − 2t1 )
t1
t1
Alle drei Ansätze liefern das gleiche Ergebnis!
Übung: Zeigen Sie, dass die drei Ergebnisse identisch sind!
Stellen Sie zur Übung die Gleichung für a (t ) auf, wenn die Phase mit abfallender
Beschleunigung (II) die doppelte Zeit dauert (t1 < t ≤ 3t1 )
Geschwindigkeit
Die Geschwindigkeit erhalten wir durch Integration aus der Beschleunigung: v(t ) = ∫ a(t )d t .
Dabei müssen wir natürlich wieder die Fallunterscheidung beachten und unbedingt auf die
Anfangs- bzw. Anschlussbedingungen achten. Diese sind:
Physik_1_1_Kinematik.doc, Prof. Dr. K. Rauschnabel, HHN, 21.10.2014 11:57
S.26/39
Für Fall I :
v(0 ) = 0
Für Fall II :
vI (t1 ) = vII (t1 ) , Da v stetig sein muss, muss die Formel für Fall II für t = t1
das gleiche Ergebnis liefern wie die Formel für Fall I!
Die Geschwindigkeiten für die Zeitpunkte t1 und 2t1 können wir unmittelbar aus den
Dreiecksflächen bestimmen: v(t1 ) = 12 ⋅ t1 ⋅ a0 und v(2t1 ) = 12 ⋅ 2t1 ⋅ a0 = t1 ⋅ a0 .
Hinweis:
Sie sollten dies verwenden, um die allgemeinen Formeln für v(t ) zu überprüfen!
Für Fall I ergibt sich durch Integration:
vI (t ) = ∫ aI (t )d t
a0
1 a
⋅t d t = ⋅ 0 ⋅t2
t1
2 t1
Wegen v(0 ) = 0 ist die Integrationskonstante Null. Auch wenn wir das bestimmte Integral
vI (t ) = ∫
t
v(t ) − v(0 ) = ∫ a (t ′)d t ′ ausrechnen, erhalten genau so schnell und einfach das Ergebnis:
0
t
a0
1 a
⋅ t′ d t′ = ⋅ 0 ⋅ t 2 − 0
t
2 t1
0 1
vI (t ) − v{
I (0 ) = ∫
=0
Übung: Überprüfen Sie, ob Sie für t1 das richtige Ergebnis erhalten (vergl. Dreiecksfläche) !
t
Für Fall II verwenden wir das bestimmte Integral v(t ) − v(t1 ) = ∫ a(t ′)d t ′ . Also:
t1
t
v(t ) = v(t1 ) + ∫ a0 −
t1
a0
⋅ (t ′ − t1 )d t ′
t1
Es ergibt sich (
Nachrechnen!) :
a
2
v(t ) = 12 a0t1 + a0 ⋅ (t − t1 ) − 0 ⋅ (t − t1 )
2t1
Damit ergibt sich für v(t ) insgesamt:
⎧ 1 a0 2
⎪⎪ 2 ⋅ t ⋅ t
1
v(t ) = ⎨
a
1
⎪ 2 a0t1 + a0 ⋅ (t − t1 ) − 0 ⋅ (t − t1 )2
2t1
⎩⎪
0 ≤ t ≤ t1
(I)
t1 < t ≤ 2t1 (II)
Ort
Physik_1_1_Kinematik.doc, Prof. Dr. K. Rauschnabel, HHN, 21.10.2014 11:57
S.27/39
1.1.3 Bew. in mehreren Dimensionen
"krummlinige Bew."
1.1.3.1 Orts- u. Geschw.-Vektor
z
t2
t4
t1
r
r (t 2 )
r
r (t1 )
t3
r
r (t3 ) r
r (t 4 )
y
x
Ortsvektor r(t)
ist Funktion der Zeit!
Beschreibung einer Bewegung im Raum:
3 Koordinaten
⇒
3 Funktionen der Zeit
x(t), y(t), z(t)
Zusammenfassung zu einem Vektor:
Physik_1_1_Kinematik.doc, Prof. Dr. K. Rauschnabel, HHN, 21.10.2014 11:57
S.28/39
Ortsvektor
⎛ x ( t )⎞
r
r ( t ) = ⎜ y( t )⎟
⎜
⎟
⎝ z( t ) ⎠
[Gl.1.1.12.]
Geschwindigkeits-Vektor
⎛ d x⎞
⎜ ⎟
r
r
r
r ⎜ dt ⎟
r
Δr d r
dy
r (t + Δt ) − r ( t )
= lim
=
=⎜ ⎟
v ( t ) = lim
Δt
Δt → 0
Δt → 0 Δt d t ⎜ d t ⎟
⎜ d z⎟
⎝ dt ⎠
Richtung von
Bahnkurve!
v(t)
[Gl.1.1.13.]
r
v
: Tangente der
Δr
r(t)
r(t+Δt)
Beispiel:
•
gegeben:
Bew. mit konst. Geschwindigkeit
Ort
u.
Ort
[m]
Geschw.
bei
t=0
Geschw.
[m/s]
x-Komp.
3
1
y-Komp.
5
-1
z-Komp.
-2
0
Physik_1_1_Kinematik.doc, Prof. Dr. K. Rauschnabel, HHN, 21.10.2014 11:57
S.29/39
•
Es
r
r r
und somit r (t ) = r0 + v0 ⋅ t
•
•
•
⎛ K⎞
r ⎜ ⎟
mit r0 = ⎜K⎟
⎜ K⎟
⎝ ⎠
Wo ist der Körper zum Zeitpunkt t1 = 10 s ?
⎛ K⎞
⎜ ⎟
r
r (t1 ) = ⎜K⎟
⎜ K⎟
⎝ ⎠
r
Berechnen Sie den Betrag der Geschw.! v0 = K
Wann
t2 = K
•
•
⎛K⎞
r
r
v ( t ) = v = ⎜K⎟ = const.
0 ⎝K⎠
ist
ist
der
⎛ K⎞
⎜ ⎟
r
r (t 2 ) = ⎜K⎟
⎜ K⎟
⎝ ⎠
Körper
bei
y=0
?
Wo
(x,y,z!)
ist
er
dann
?
r r
r r
Welcher Winkel ist zw. r1 = r (t1 ) und r2 = r (t 2 ) ? α = K
Zeichnen Sie in ein "y-x-Diagramm" die Bahn des Körpers, den Ortsvektor zum Zeitpunkt t=0
und t=1 s! Kennzeichnen Sie auf der Bahn die Position des Körpers in
1 s-Schritten zwischen t=0 und t= 10 s !
1.1.3.2 Beschleunigungs-Vektor
Physik_1_1_Kinematik.doc, Prof. Dr. K. Rauschnabel, HHN, 21.10.2014 11:57
S.30/39
Bahn des Körpers
v(t)
r(t)
v(t+Δt)
r(t+Δt)
Änderung des
Geschwindugkeits-
v(t)
Vektors
Δv
v(t+Δt)
Beschleunigungs-Vektor
Geschwindigkeit zum Zeitp.
t:
…
zum Zeitp.
…
-Änderung:
r
v(t)
r
t + Δt : v ( t + Δt )
r
Δv
r
r
Änderung Δv des Geschw.-Vektors v :
Betrag
Richtung
Betrag und Richtung
Physik_1_1_Kinematik.doc, Prof. Dr. K. Rauschnabel, HHN, 21.10.2014 11:57
S.31/39
Beschleunigung
⎛ d v x ⎞ ⎛⎜ d 2 x ⎞⎟
⎟
⎜
d t ⎟ ⎜ d t2 ⎟
⎜
r
r
r
r
Δv d v ⎜ d v y ⎟ ⎜ d 2 y ⎟
v (t + Δt ) − v ( t )
r
a( t ) = lim
= lim
=
=⎜
⎟ =⎜ 2⎟
d
d
Δ
Δ
t
t
t
t
Δt → 0
Δt → 0
⎜ dv ⎟ ⎜ dt ⎟
⎜ z ⎟ ⎜ d2 z ⎟
⎜ d t ⎟ ⎜⎜ 2 ⎟⎟
⎠ ⎝ dt ⎠
⎝
TangentialBeschleunigung
Normal-Beschleunigung
r r
a v
r r
a ⊥v
Richtung bleibt konst.
r
v ändert sich
[Gl.1.1.14.]
allg. Fall
Richtung ändert sich
Richtung und
r
r
v bleibt konst.
v ändern sich
r
Vektor a zeigt zur "Innenseite der Kurve"!
1. Tangentialbeschleunigung:
r r
dv = a ⋅dt
rr
r r
a v ⇒ dv v
r
⇒ nur der Betrag von v ändert sich!
dv
v(t)
v(t+dt)
2. Normalbeschleunigung:
v(t+dt)
dv
v(t)
r r
r r
a ⊥v ⇒ d v ⊥ v
r
⇒ nur die Richtung von v ändert sich!
r
r
r
Bem.: für eine Normalbeschl. und "infinitesimal kleine" d t bzw. d v ist v( t + d t ) ≈ v( t ) !
3. beliebige Richtung:
v
a wird zerlegt in
r
eine Komp. parallel zu v
Physik_1_1_Kinematik.doc, Prof. Dr. K. Rauschnabel, HHN, 21.10.2014 11:57
S.32/39
und
r
eine Komp. senkrecht zu v :
bzw. Geschw.-Änderung
v(t+dt)
v(t)
v r
a=a
r
+a
II
⊥
r
r
r
dv = dv + dv
II
⊥
dv
dv
dv
1.1.3.3 Überlagerung von Bewegungsabläufen
Superpositionsprinzip
♦ Gleichzeitig ablaufende Bewegungen eines Körpers beeinflussen einander nicht
♦ Wenn diese Bewegungen einzeln nacheinander ablaufen wird der gleiche Bewegungszustand
erreicht
♦ Ein (komplizierter) Bewegungsablauf kann in einzelne (einfachere) Teil-Bewegungen "zerlegt"
werden
Beispiel: Flugzeug - Wind
Vw
VF
Vges
Beschleunigungen, Geschwindigkeiten, Ortsvektoren
… vektoriell addieren!
Bem: Dies gilt nicht mehr unverändert, wenn die Geschw. sehr groß
(vergleichbarmit der Lichtgeschw.) werden! Relativität!
Physik_1_1_Kinematik.doc, Prof. Dr. K. Rauschnabel, HHN, 21.10.2014 11:57
S.33/39
Begr.:
a.) Physik -
Bewegungen stören sich nicht
(⇔ Beschr. der gl. Bew. in versch Bezugssystemen)
b.)
--------------------------------------------------------------------------------------
( =$ Σ !)
Mathe: Integral
∫ [ f ( x ) + g( x )] d x = ∫ f ( x ) d x + ∫ g( x ) d x
→
"lineare
Operation"
"erst addieren, dann 1 Integral = 2 × integrieren, dann addieren"
--------------------------------------------------------------------------------------
Beschleunigung
Geschwindigkeit
Ortsvektor
Bew. 1
Bew. 2
Gesamt-Bew.
r
a
1
r
r
v = ∫ a dt
1
1
r
a
2
r
r
v = ∫ a dt
2
2
r
r
r = ∫ v dt
1
1
r
r
r = ∫v dt
2
2
r r
r
a = a +a
1 2
r
r
v = ∫ adt
r r
= ∫ a + a dt
1 2
r r
= v +v
1 2
r
r
r = ∫ v dt
r r
= ∫ v + v dt
1 2
r r
= r +r
1 2
(
)
(
)
[Gl.1.1.15.]
Merke: gleiches Ergebnis , egal ob Sie …
1. Beschleunigungen "a" addieren, daraus "v" und "r" ausrechnen
oder
2. für jede Bew. einzeln "v" ausrechnen, dann "v" addieren
oder
3. für jede Bew. einzeln "r" ausrechnen, dann "r" addieren
Bsp.1: waagerechter Wurf
y
Überlagerung von
Bew. 1:
konst. Geschwindigkeit
→
Bew. 2:
konst. Beschleunigung
↓
O
v0
x
g
Anfangsbed.: x(0)=0 , vx(0)=v0
y(0)=0 , vy(0)=0
Physik_1_1_Kinematik.doc, Prof. Dr. K. Rauschnabel, HHN, 21.10.2014 11:57
S.34/39
(Abwurf im Ursprung, y-Achse nach oben)
Bew. 1:hor. Bew. mit Bew. 2:vert. Bew. mit Gesamt-Bew.
konst Geschw.
konst. Beschl.
r r
r
r
a =0
a = −0g
a = −0g
1
2
Geschwindigkeit
r r
⎛v ⎞
v = v = ⎜ 0⎟
1 0 ⎝ 0⎠
( )
r
v = (−0gt )
2
Orstvektor
r ⎛ v ⋅ t⎞
r =⎜ 0 ⎟
1 ⎝ 0 ⎠
r ⎛ 0 ⎞
r = ⎜ − 1 gt 2 ⎟
2 ⎝ 2
⎠
Beschleunigung
( )
r ⎛v ⎞
v =⎜ 0⎟
⎝ − gt⎠
r ⎛ v0 ⋅ t ⎞
r = ⎜⎜ 1 2 ⎟⎟
⎝ − 2 gt ⎠
[Gl.1.1.16.]
Bsp. 2: schiefer Wurf
y
v0
Überlagerung von
r0
Bew. 1:
g
φ
O
r
konst. Geschwindigkeit v0
x
Bew. 2:
konst. Beschleunigung ↓
r ⎛x ⎞
r = ⎜ y0 ⎟ (gegeben)
0 ⎝ 0⎠
Anfangsbed.: Abwurf bei
r
v = v , Winkel zur Horiz.: ϕ (geg.)
0
0
Abwurfgeschw.
Zerl. der Anfangs-Geschw. in x- u. y-Komp.:
r
Bew. 1: konst Geschw. v0
Beschl.
Geschw.
r r
a =0
1
⎛ v ⋅ cos ϕ⎞
r
r
v = v = ⎜ v0 ⋅ sin ϕ ⎟
1
0 ⎝ 0
⎠
⎛ v ⋅ cos ϕ⎞
r
v = ⎜ v0 ⋅ sin ϕ ⎟
0 ⎝ 0
⎠
Bew.
2:
r
Beschl. g
( )
r
v = (−0gt )
2
r
r
a = g = −0g
2
konst. Gesamt-Bew.
r r
a=g
r v
r
v = g ⋅t + v
0
Physik_1_1_Kinematik.doc, Prof. Dr. K. Rauschnabel, HHN, 21.10.2014 11:57
S.35/39
Ortsv.
r r
r
r = v ⋅t + r
1
0
0
⎛ v ⋅ cos ϕ ⋅ t + x ⎞
= ⎜ v0 ⋅ sin ϕ ⋅ t + y 0 ⎟
⎝ 0
0⎠
r
r
r
v
r = 1 gt 2 + v t + r
0
0
2
⎛ 0 ⎞
r
r = ⎜ − 1 gt 2 ⎟
2 ⎝ 2
⎠
[Gl.1.1.17.]
oder: Bew. 1:
Bew. 2:
v = v ⋅ cosϕ
0
x
hor. Bew. mit konst Geschw.
vert. Bew. konst. Beschl., Anfangsgeschw. v
y
0
= v ⋅ sin ϕ
0
Ergebnis (wie oben):
( )
⎛ v ⋅ cos ϕ⎞
⎛x ⎞
r
r = 1 −0g ⋅ t 2 + ⎜ v0 ⋅ sin ϕ ⎟ ⋅ t + ⎜ y0 ⎟
2
⎝ 0
⎠
⎝ 0⎠
0 + v ⋅ cos ϕ ⋅ t + x ⎞
⎛
0
0
= ⎜⎜ 1
2 + v ⋅ sin ϕ ⋅ t + y ⎟⎟
−
⋅
g
t
⎝ 2
0
0⎠
[Gl.1.1.18.]
⇒ Bahnkurve y=y(x), Wurfweite, Wurfhöhe, optim. Abwurfwinkel etc.
y
1.1.3.4 Kreisbewegung
zunächst: gleichförmige Kreisbewegung:
r
v = const.
r
r
r
⇒ a = 0 ! nur Normalbeschl. a !
⊥
II
v
r
φ
s
R
x
Richtung
r
von v ändert sich dauernd
⇒ beschleunigte Bewegung!
r
Richtung von a ?
r
r r
r r
v Tangente! , v ⊥r ⇒ v ⋅ r = 0
r r
r
r r
da a ⊥v , und a zur "Kurveninnenseite" zeigt ⇒ a ( −r )
r
⇒ a zeigt zum Kreismittelpunkt!
"Zentripetalbeschleunigung"
Physik_1_1_Kinematik.doc, Prof. Dr. K. Rauschnabel, HHN, 21.10.2014 11:57
S.36/39
r
v = const. ⇒ Bogenlänge
r
s = v ⋅ t = v ⋅ t (mit s( 0) = 0 !)
Mit ϕ im Bogenmaß …
s = ϕ⋅R
vt = ϕR
v
ϕ( t ) = t = ω ⋅ t
R
v
R
[Gl.1.1.19.]
dϕ
= ϕ&
dt
[Gl.1.1.20.]
Winkelgeschwindigkeit (Kreisfrequenz) ω : ω =
allg.
ω = "Winkeländerung pro Zeit",
ω=
ϕ = ∫ ω d t , hier: ϕ = ω ⋅ t
Periodendauer T: ωT = 2 π ⇒ ω =
1
2π
Frequenz f = , ω = 2 πf
T
T
[Gl.1.1.21.]
Drehbewegung:
Winkel
ϕ
Einh.: 1
Winkelgeschwindigkeit
ω
Einh.: 1/s
Winkelbeschleunigung
α
Einh.: 1/s2
(rad.) Bogenmaß!!!
ω( t ) = ∫ α( t ) d t
[Gl.1.1.22.]
ϕ( t ) = ∫ ω( t ) d t
[Gl.1.1.23.]
Bsp.: gleichf. beschl Drehbewegung
()
()
α=const. ; ω t = ω ; ϕ t = ϕ
1
1
1
1
()
ω( t ) − ω = α ⋅ t − t
1
1
()
2
ϕ( t ) − ϕ = 1 α ⋅ t − t
+ω ⋅ t−t
1 2
1
1
1
t
ω( t ) − ω t = ∫ α(t ′) d t ′
1
t
1
t
ϕ( t ) − ϕ t = ∫ ω(t ′) d t ′
1
t
1
(
)
( )
( )
Vergleich
1-dim. Bewegung
Ort, Weg s
Geschwindigkeit
Beschleunigung
Drehbewegung
Winkel
v = s&
a = v& = &&
s
ϕ
Winkelgeschwindigkeit
Winkelbeschleunig.
ω = ϕ&
&&
α = ω& = ϕ
Physik_1_1_Kinematik.doc, Prof. Dr. K. Rauschnabel, HHN, 21.10.2014 11:57
S.37/39
Vergleich wird fortgesetzt!
Merke: auch eine gleichförmige Kreisbewegung ist eine
b e s c h l e u n i g t e Bewegung!
r
r r
a=a ≠0
⊥
!!!
z.Zw.d.Ü.:
•
Beschreiben Sie die gleichf. Kreisbewegung eines Körpers in der x-y-Ebene durch den
r r
Orstvektor r = r ( t ) !
geg.:
Winkelgeschw.: ω
Bahnradius: R,
Drehr.: entgegen dem Uhrzeigers.,
Anfangsbed.: bei t=0 sei der Körper y=0
()
r
r (t) = K
K
•
r
Wie groß ist r ?
•
Bestimmen Sie ϕ( t ) !
•
•
•
•
•
•
Lösung durch
a.) Nach-Denken
b.) Nach-Rechnen
Lösungwege wie oben!
r
dr ( t )
r
Bestimmen Sie rechnerisch den Geschw.-Vektor v ( t ) =
dt
r r
Zeigen Sie rechnerisch, dass v⊥ r ist!
r
d v ( t)
r
Bestimmen Sie rechnerisch den Beschleunigungs-Vektor a( t ) =
dt
r
r r
r
Zeigen Sie, dass a ↑↓ r ist, d.h. a( t ) = −(K) ⋅ r ( t ) !
r r
Zeigen Sie rechnerisch, daß a ⊥v ist!
r
Zeigen Sie, dass a( t ) zeitlich konstant ist!
Ergebnis:
Zentripetalbeschleunigung
a = ω2 ⋅ R
z
v2
=
R
[Gl.1.1.24.]
Physik_1_1_Kinematik.doc, Prof. Dr. K. Rauschnabel, HHN, 21.10.2014 11:57
S.38/39
Physik_1_1_Kinematik.doc, Prof. Dr. K. Rauschnabel, HHN, 21.10.2014 11:57
S.39/39