Schwingungsminderung an Eisenbahn-Rädern durch
Werbung

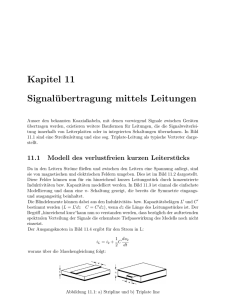
Diplomarbeit am Institut für Strömungsmechanik und Technische Akustik der
Technischen Universität Berlin
Schwingungsminderung an Eisenbahn-Rädern
durch Piezo-Aktoren
Michael Stütz
Betreut von:
Dr.-Ing. Joachim Feldmann
Dr.-Ing. Andre Jakob
Prof. Dr.-Ing. Michael Möser
Berlin, November 2005
.
Die selbstständige und eigenhändige Anfertigung
versichere ich an Eides statt.
Datum/U nterschrif t
Abstract
Es wurde die Dämpfung eines Eisenbahn-Radsatz-Modelles durch passive und aktive
Maßnahmen mit Hilfe von Piezoelementen untersucht. Bei der aktiven Dämpfung wurde
ein Feedbacksystem benutzt. Als Aktoren dienten dabei 2 piezoelektrische Platten,
welche auf die Radscheibe aufgeklebt wurden. Die selben piezoelektrischen Platten wurden bei der passiven Dämpfung dazu benutzt durch ein elektrisches Netzwerk, welches
mit den Piezoelementen verbunden wurde, dem Rad in einzelnen Moden Schwingungsenergie zu entziehen.
Mit dem Verfahren der aktiven Schwingungsminderung konnten zum Teil sehr gute
Ergebnisse erzielt werden. Die P(2,0) Mode bei 1428Hz konnte beim rollenden Rad im
Mittel an allen Messpunkten um 20 dB reduziert werden. Erwartungsgemäß konnten mit
der passiven Dämpfung nicht ganz so gute Werte erreicht werden. Für die P(2,0) Mode
wurde eine Dämpfung von 8 dB erreicht. Da die innere Dämpfung des Schwingkreises
nicht optimal war, ist eventuell bei entsprechender Optimierung eine Steigerung der
Schwingungsdämpfung möglich.
Inhaltsverzeichnis
Tabellenverzeichnis
7
1 Einleitung
8
2 Der piezoelektrische Effekt
10
2.1 Piezoelektrische Koeffizienten . . . . . . . . . . . . . . . . . . . . . . . . 10
3 Piezoelektrische Dämpfungstechniken
3.1 Passive Techniken . . . . . . . . . . .
3.1.1 1-modal . . . . . . . . . . . .
3.1.2 Multimodal . . . . . . . . . .
3.2 Aktive Techniken . . . . . . . . . . .
3.2.1 Feedback . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
12
13
14
19
23
24
4 Versuchsaufbau
25
4.1 Versuchsaufbau bei frei hängendem Radsatz . . . . . . . . . . . . . . . . 25
4.1.1 Gyratoren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
4.2 Versuchsaufbau des Radprüfstandes . . . . . . . . . . . . . . . . . . . . . 30
5 Das Radsatzmodell
31
5.1 Eigenfrequenzen des frei hängenden Radsatzes . . . . . . . . . . . . . . . 32
5.2 Eigenfrequenzen des rollenden Radsatzes . . . . . . . . . . . . . . . . . . 36
6 Ergebnisse
6.1 Versuchsdurchführung und Ergebnisse bei frei hängendem Radsatz
6.1.1 Passive Schwingungsminderung . . . . . . . . . . . . . . .
6.1.2 Aktive Schwingungsminderung . . . . . . . . . . . . . . . .
6.2 Versuchsdurchführung und Ergebnisse bei rollendem Radsatz . . .
6.2.1 Passive Schwingungsminderung . . . . . . . . . . . . . . .
6.2.2 Aktive Schwingungsminderung . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
38
38
38
45
50
50
51
7 Zusammenfassung und Ausblick
54
Literaturverzeichnis
56
A Größenverzeichnis
59
1
INHALTSVERZEICHNIS
B Messergebnisse der passiven Dämpfung bei ruhendem Rad
B.1 347Hz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.2 437Hz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.3 653Hz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.4 860Hz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.5 904Hz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.6 1304Hz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.7 Einfluss der Abweichung der elektrischen Resonanzfrequenz . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
60
60
62
65
67
69
71
73
C Messergebnisse
C.1 347Hz . . .
C.2 437Hz . . .
C.3 653Hz . . .
C.4 860Hz . . .
C.5 904Hz . . .
C.6 1304Hz . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
75
75
78
80
83
85
88
der aktiven Dämpfung bei
. . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . .
ruhendem
. . . . . . .
. . . . . . .
. . . . . . .
. . . . . . .
. . . . . . .
. . . . . . .
Rad
. . .
. . .
. . .
. . .
. . .
. . .
.
.
.
.
.
.
D Messergebnisse der passiven Dämpfung bei rollendem Rad
91
D.1 1428Hz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
E Messergebnisse der aktiven Dämpfung bei rollendem Rad
94
E.1 1428Hz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94
E.2 1428Hz - Dämpfung bei unterschiedlichen Drehzahlen . . . . . . . . . . . 96
2
Abbildungsverzeichnis
2.1 Piezolelektrische Platte . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
3.1 Einteilung der Dämpfungsschaltungen nach Fleming [21] . . . . . . . . .
3.2 Schwingkreis bestehend aus einem Piezoelement (gestrichelt umrandet)
mit parallel dazu geschaltetem Widerstand RS und Induktivität L . . . .
3.3 Einmassenschwinger gedämpft durch a) ein Piezo-Element beschaltet mit
einem elektrischen Schwingkeis (RSP) und b) einen mechanischem Resonanzabsorber (PMD) . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.4 Einfluß des elektrischen Dämpfungsparameters r auf ein ungedämpftes
mechanisches System . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.5 Einfluß des elektrischen Dämpfungsparameters r auf ein gedämpftes System mit dem mechanischen Dämpfungsparameter ζ=0,1 . . . . . . . . .
3.6 3-modaler current-flow Schaltkreis nach Hollkamp [3] . . . . . . . . . . .
3.7 2-modaler current-block Schaltkreis nach Wu [27] . . . . . . . . . . . . .
3.8 3-modaler current-flow Schaltkreis nach Behrens und Moheimani[30] . . .
3.9 2-modaler series-parallel Schaltkreis nach Behrens und Moheimani [6] . .
3.10 (a) Impedanz-Synthese (b) Admittanz-Synthese . . . . . . . . . . . . . .
3.11 Synthetische Admittanz mit einer spannungskontrollierten Stromquelle
(schattiert dargestellt) . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.12 Blockschaltbild eines Feedbacksystems . . . . . . . . . . . . . . . . . . .
4.1 Versuchsaufbau des stationären Radsatzes, M1-M3 kennzeichnen die Messpunkte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2 Versuchsaufbau des Feedbacksystems . . . . . . . . . . . . . . . . . . . .
4.3 Gyratoren unterschiedlicher Bauart ((a) aus [16][33], (b) aus [12], (c) aus
[34]) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.4 Radprüfstand mit eingebautem Radsatz und Schienenrad (schwarz) . . .
5.1 Transferadmittanzen Y des Radsatzes bei (a) axialer und (b) radialer
Anregung (νr≡radiale Schnelle, νa≡axiale Schnelle, p≡Schalldruck (in
0,5m Entfernung und 45◦ zur Scheibenebene)) . . . . . . . . . . . . . . .
5.2 Modenformen der ersten 6 Moden (axial) . . . . . . . . . . . . . . . . . .
5.3 Radsatzmoden, Knotendurchmesser und -kreise (rot dargestellt) in Bezug
zur Lage der Messpunkte und den piezolelektrischen Platten . . . . . . .
5.4 Schnellespektrum des Radsatzes rollend mit Schienenrad sowie ruhend
mit und ohne Schienenrad (mit Impulshammer angeregt) . . . . . . . . .
3
13
14
14
18
19
20
20
21
22
23
23
24
26
26
29
30
33
34
35
36
ABBILDUNGSVERZEICHNIS
5.5 P(2,0) Mode des Radsatzes rollend mit Schienenrad sowie ruhend mit
und ohne Schienenrad (mit Impulshammer angeregt) . . . . . . . . . . . 37
6.1 Übertragungsfunktionen für verschiedene Kopplungskoeffizienten Kij mit
Dämpfung des Systems (a) ζ = 0,002 (b) ζ = 0,02 . . . . . . . . . . . . .
6.2 Transferadmittanz Messpunkt 1 (axial) . . . . . . . . . . . . . . . . . . .
6.3 Transferadmittanz Messpunkt 2 (axial) . . . . . . . . . . . . . . . . . . .
6.4 Transferadmittanz Messpunkt 3 (radial) . . . . . . . . . . . . . . . . . .
6.5 Transferadmittanz Mikrophon 1 (axial) . . . . . . . . . . . . . . . . . . .
6.6 Transferadmittanz Mikrophon 2 (radial) . . . . . . . . . . . . . . . . . .
6.7 Dämpfung des Schwingkreises durch Kopplung mit dem Radsatz . . . .
6.8 Transferfunktionen bei verschiedenen Resonanzfrequenzen des Schwingkreises (a) theoretisch (b) Messpunkt 1 (axial) . . . . . . . . . . . . . . .
6.9 347-Hz-Mode, Transferadmittanz am Messpunkt 1 mit und ohne Feedbackregelung (axial) . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.10 437-Hz-Mode, Transferadmittanz Messpunkt 1 mit und ohne Feedbackregelung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.11 653-Hz-Mode, Transferadmittanz Messpunkt 1 mit und ohne Feedbackregelung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.12 860-Hz-Mode, Transferadmittanz Messpunkt 1 mit und ohne Feedbackregelung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.13 904-Hz-Mode,Transferadmittanz Messpunkt 1 mit und ohne Feedbackregelung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.14 1304-Hz-Mode, Transferadmittanz Messpunkt 1 mit und ohne Feedbackregelung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.15 Schnellespektrum mit und ohne passiver Dämpfung, Messpunkt 2 . . . .
6.16 Schnellespektrum des Sensorsignals mit und ohne aktiver Dämpfung . . .
6.17 stabile / instabile Übertragungsfunktion der Sekundärstrecke bei ruhendem Rad gemessen, roter Kreis markiert Instabilität . . . . . . . . . . . .
B.1
B.2
B.3
B.4
B.5
B.6
B.7
B.8
B.9
B.10
B.11
B.12
B.13
B.14
B.15
B.16
Transferadmittanz
Transferadmittanz
Transferadmittanz
Transferadmittanz
Transferadmittanz
Transferadmittanz
Transferadmittanz
Transferadmittanz
Transferadmittanz
Transferadmittanz
Transferadmittanz
Transferadmittanz
Transferadmittanz
Transferadmittanz
Transferadmittanz
Transferadmittanz
Messpunkt 1 (axial) .
Messpunkt 2 (axial) .
Messpunkt 3 (radial)
. . . . . . . . . . . .
Messpunkt 1 (axial) .
Messpunkt 2 (axial) .
Messpunkt 3 (radial)
Mikrophon 1 (axial) .
Mikrophon 2 (radial)
. . . . . . . . . . . .
Messpunkt 1 (axial) .
Messpunkt 2 (axial) .
Messpunkt 3 (radial)
. . . . . . . . . . . .
Messpunkt 1 (axial) .
Messpunkt 2 (axial) .
4
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
39
41
41
42
42
43
43
45
47
48
48
49
49
50
51
53
53
60
61
61
62
62
63
63
64
64
65
65
66
66
67
67
68
ABBILDUNGSVERZEICHNIS
B.17
B.18
B.19
B.20
B.21
B.22
B.23
B.24
B.25
B.26
B.27
Transferadmittanz Messpunkt 3 (radial) . . . . . . . . . . . . . . . . . .
Transferadmittanz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Transferadmittanz Messpunkt 1 (axial) . . . . . . . . . . . . . . . . . . .
Transferadmittanz Messpunkt 2 (axial) . . . . . . . . . . . . . . . . . . .
Transferadmittanz Messpunkt 3 (radial) . . . . . . . . . . . . . . . . . .
Transferadmittanz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Transferadmittanz Messpunkt 1 (axial) . . . . . . . . . . . . . . . . . . .
Transferadmittanz Messpunkt 2 (axial) . . . . . . . . . . . . . . . . . . .
Transferadmittanz Messpunkt 3 (radial) . . . . . . . . . . . . . . . . . .
Transferadmittanz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Transferfunktionen bei verschiedenen Resonanzfrequenzen des Schwingkreises (a) theoretisch (b) Messpunkt 1 (axial) . . . . . . . . . . . . . . .
B.28 Transferadmittanzen bei verschiedenen Resonanzfrequenzen des Schwingkreises Messpunkt 2 (axial) und Messpunkt 3(radial) . . . . . . . . . . .
B.29 Transferadmittanzen bei verschiedenen Resonanzfrequenzen des Schwingkreises Mikrofon 1 und 2 . . . . . . . . . . . . . . . . . . . . . . . . . . .
68
69
69
70
70
71
71
72
72
73
C.1 Transferadmittanz
C.2 Transferadmittanz
C.3 Transferadmittanz
C.4 Transferadmittanz
C.5 Transferadmittanz
C.6 Transferadmittanz
C.7 Transferadmittanz
C.8 Transferadmittanz
C.9 Transferadmittanz
C.10 Transferadmittanz
C.11 Transferadmittanz
C.12 Transferadmittanz
C.13 Transferadmittanz
C.14 Transferadmittanz
C.15 Transferadmittanz
C.16 Transferadmittanz
C.17 Transferadmittanz
C.18 Transferadmittanz
C.19 Transferadmittanz
C.20 Transferadmittanz
C.21 Transferadmittanz
C.22 Transferadmittanz
C.23 Transferadmittanz
C.24 Transferadmittanz
C.25 Transferadmittanz
C.26 Transferadmittanz
C.27 Transferadmittanz
C.28 Transferadmittanz
C.29 Transferadmittanz
75
76
76
77
77
78
78
79
79
80
80
81
81
82
82
83
83
84
84
85
85
86
86
87
87
88
88
89
89
Messpunkt 1 (axial) .
Messpunkt 2 (axial) .
Messpunkt 3 (radial)
. . . . . . . . . . . .
PZT2 . . . . . . . .
Messpunkt 1 (axial) .
Messpunkt 2 (axial) .
Messpunkt 3 (radial)
. . . . . . . . . . . .
PZT 1 . . . . . . . .
Messpunkt 1 (axial) .
Messpunkt 2 (axial) .
Messpunkt 3 (radial)
. . . . . . . . . . . .
PZT 1 . . . . . . . .
Messpunkt 1 (axial) .
Messpunkt 2 (axial) .
Messpunkt 3 (radial)
. . . . . . . . . . . .
PZT 1 . . . . . . . .
Messpunkt 1 (axial) .
Messpunkt 2 (axial) .
Messpunkt 3 (radial)
. . . . . . . . . . . .
PZT 1 . . . . . . . .
Messpunkt 1 (axial) .
Messpunkt 2 (axial) .
Messpunkt 3 (radial)
. . . . . . . . . . . .
5
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
73
74
74
ABBILDUNGSVERZEICHNIS
C.30 Transferadmittanz PZT 1 . . . . . . . . . . . . . . . . . . . . . . . . . . 90
D.1
D.2
D.3
D.4
Schnelle
Schnelle
Schnelle
Schnelle
im
im
im
im
Messpunkt
Messpunkt
Messpunkt
Messpunkt
E.1
E.2
E.3
E.4
E.5
E.6
Schnellespektrum
Schnellespektrum
Schnellespektrum
Schnellespektrum
Schnellespektrum
Schnellespektrum
1 (axial) . . .
2 (axial) . . .
3 (radial) . .
4 . . . . . .
.
.
.
.
91
92
92
93
mit und ohne Feedback, Messpunkt 1 . . . . . . . . . .
mit und ohne Feedback, Messpunkt 2 (Feedbacksensor)
mit und ohne Feedback, Messpunkt 3 . . . . . . . . . .
in den Messpunkten 1-4 bei 87 U/min . . . . . . . . .
in den Messpunkten 1-4 bei 114 U/min . . . . . . . . .
in den Messpunkten 1-4 bei 155 U/min . . . . . . . . .
94
95
95
96
97
97
6
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Tabellenverzeichnis
5.1 Abmessungen des Radsatzmodelles . . . . . . . . . . . . . . . . . . . . . 31
5.2 Theoretische und gemessene Modulationsfrequenzen fm . . . . . . . . . 37
6.1 Überblick über die Messergebnisse der passiven Schwingungsminderung
der ersten 6 Moden des Radsatzes, ∆ ν/VF ist die maximal erreichte
Schwingungsminderung, ζ die strukturelle Dämpfung, Q die erreichte
Güte des Schwingkreises . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
6.2 Überblick über die Messergebnisse der aktiven Schwingungsminderung
der ersten 6 Moden des Radsatzes für die Messpunkte M1 bis M5 . . . . 47
7
Kapitel 1
Einleitung
Seit etlichen Jahren wird der piezoelektrische Effekt in der passiven und aktiven Schwingungsminderung eingesetzt. Die Anwendungen reichen dabei von Satellitentechnik bis
hin zu gewöhnlichen Konsumprodukten wie z.B. in Snowboards [1].
Einerseits kommen Piezo-Elemente als Aktoren in der Aktiven Schwingungsminderung
zur Anwendung. Andererseits lässt sich der Piezoelektrische Effekt auch umkehren und
macht die Anwendung in der passiven Schwingungsminderung möglich. Hagood und
von Flotow [2] stellten 1991 in ihrer Arbeit ein Modell zur passiven piezoelektrischen
Dämpfung, in Analogie zur Dämpfung durch viskoelastische Materialien, vor. Die durch
die mechanische Schwingungsenergie entstandenen freien Ladungsträger werden über
ein elektrisches Netzwerk, welches an die Piezokeramik angeschlossen wird, abgeleitet.
Die elektrische Impedanz des Netzwerkes muss dafür genau abgestimmt werden. In ihrer
Arbeit erreichten Hagood und von Flotow eine Reduzierung der Schwingungsamplitude
der ersten Mode eines einfach eingespannten Biegebalkens um 35 dB. In Kapitel 3 sind
diese und andere Techniken genauer beschrieben. Seither gab es zahlreiche Forschungsberichte, die die Schwingungsdämpfung von Stäben und Platten beschreiben. Davon
sollen hier nur einige wenige beispielhaft genannt werden.
Hollkamp [3] erweiterte die Technik von Hagood und von Flotow und erreichte eine
gleichzeitige Dämpfung der zweiten und dritten Mode eines Stabes von 19 dB und 12
dB mit nur einem Piezo-Element. Allerdings lässt sich das multiresonante elektrische
Netzwerk nur noch numerisch optimieren. Moheimani, Behrens und Fleming [4]-[11]
entwickelten neue leichter zu optimierende elektrische Netzwerk und schlugen u.a. vor,
die elektrische Impedanz, die an der Piezokeramik anliegt durch einen Digitalen Signalprozessor (DSP) zu synthetisieren. Sie widmen sich in ihren zahlreichen Arbeiten nicht
nur der passiven sondern auch der aktiven strukturellen Dämpfung mit Hilfe von PiezoElementen.
Agnes [12] kombiniert aktive und passive Schwingungsminderung. Er beschaltet wie
Hagood und von Flotow ein Piezo-Element mit einem R-L-Schaltkreis zur modalen
Dämpfung. Gleichzeitig benutzt er das gleiche Piezo-Element aber auch als Aktor einer
Feedbackschleife zur breitbandigen Dämpfung. Experimentell wird die Schwingungsamplitude der 2. Mode eines einfach eingespannten Biegebalkens mit dieser Technik um 20
dB reduziert.
Adachi, Awakura und Iwatsubo [13] entwickeln eine neue aktive Steuerungstechnik,
basierend auf der von Agnes [12] beschriebenen Methode. Durch die Kombination von
8
KAPITEL 1. EINLEITUNG
passiven und aktiven Elementen wird die strukturelle Dämpfung, im Gegensatz zu reinen
aktiven Maßnahmen, verbessert. Durch die passive Dämpfung wird der Kontrollaufwand
des aktiven Systems verringert, welches somit auch stabiler wird.
Auch Morgan und Wang [14][15] kombinieren in ihrer Arbeit aktive und passive Methoden, um die Nachteile der rein passiven Methode zu kompensieren, für den Fall, dass
sich die Resonanzfrequenzen verschiebenden .
Ahmadian und Jeric [16] untersuchten den Einfluss von Piezo-Elementen mit einem RL-Schaltkreis auf die Schalldämmung einer dünnen Metallplatte. Sie konnten damit die
Schalldämmung um bis zu 7 dB erhöhen.
Niekerk, Tongue und Packard [17] erhöhen die Schalldämmung einer dünnen runden
Scheibe, mit Hilfe von Piezo-Elementen als Aktoren einer dynamischen Feedback/ Feedforward Regelung. Sie erreichen damit eine Verbesserung der Schalldämmung um 15 dB.
Eine Reihe von Arbeiten [18][19][20] beschäftigt sich auch mit der Möglichkeit ein PiezoElement als Sensor und gleichzeitig als Aktor zu benutzen. Dadurch kann auf einen
zusätzlichen Sensor verzichtet werden.
Am häufigsten werden Piezo-Elemente zur Dämpfung von Leichtbaustrukturen eingesetzt. Die Gewichstzunahme ist im Gegensatz zu herkömmlichen Methoden viel geringer.
Aber nicht nur bei Leichtbaustrukturen finden Piezo-Elemente Anwendung. Ahlers [23]
und auch Hagedorn und von Wagner [26] benutzen erfolgreich in ihren Arbeiten PiezoElemente zur Unterdrückung von Bremsenquietschen.
Heckl und Abrahams [24] und Heckl und Huang [25] untersuchen die Unterdrückung von
Kurvenquietschen bei Eisenbahnrädern, mit Hilfe einer aktiven Feedback-Steuerung. Als
Aktoren kommen dabei Piezokeramiken zum Einsatz.
Ziel dieser Arbeit ist es zu untersuchen, inwieweit piezoelektrische Platten dazu benutzt werden können, passiv und aktiv die Schwingung von Eisenbahnrädern zu mindern. Der Einfluss der Modenform auf die Dämpfung wird auch betrachtet. Zur passiven
Schwingungsminderung wurde das Modell von Hagood und von Flotow [2] benutzt. Bei
der aktiven Schwingungsminderung kam ein Feedbackregelkreis zur Anwendung. Die Untersuchungen wurden alle an einem Radsatzmodell vom Maßstab 1:4 durchgeführt. Zuerst wurde ein ruhender frei hängender Radsatz untersucht und dann wurde überprüft,
in wie weit sich die Ergebnisse auf einen rollenden Radsatz übertragen lassen.
Am Anfang dieser Arbeit wird in Kapitel 2 kurz auf die Grundlagen des piezoelektrische
Effektes eingegangen. In Kapitel 3 werden die verschiedenen Möglichkeiten der piezoelektrischen Dämpfungstechniken erläutert. Dabei liegt der Schwerpunkt auf der verwendeten passiven Methode von Hagood und von Flotow. In den Kapiteln 4 und 5 wird
das verwendete Radsatzmodel und der Versuchsaufbau näher beschrieben. In Kapitel 6
werden die experimentellen Ergebnisse präsentiert und diskutiert. Eine Zusammenfassung dieser Arbeit sowie einen Ausblick auf mögliche zukünftige Untersuchungen findet
man in Kapitel 7.
9
Kapitel 2
Der piezoelektrische Effekt
Das Wort ”P iezo” ist vom griechischem Wort für Druck abgeleitet. Im Jahre 1880
entdeckten die Brüder Pierre und Jacques Curie den Piezoeffekt am Turmalin. Im Experiment konnten sie nachweisen, dass eine elektrische Spannung an den Oberflächen
entstand, sobald der Kristall mechanischem Druck ausgesetzt wurde. Wenig später fanden sie diese Eigenschaft auch an anderen Kristallen, wie etwa Quarz, Topaz oder Seignettesalz. 1881 sagte Gabriel Lippmann den umgekehrten Piezoeffekt, sprich die Verformung des Kristalls aufgrund eines angelegten elektrischen Feldes, voraus, welcher
dann auch von den Curie Brüdern experimentel nachgewiesen wurde. Der bei Quarzen
festgestellte piezoelektrische Effekt ist allerdings sehr gering. Für technische Anwendungen sind vor allem Piezokeramiken wie z.b. Barium-Titanat BaTiO3 und Blei-ZirkonatTitanat (PZT) interessant, welche einen um bis zu 200 mal größeren elektromechanischen
Wirkungsgrad aufweisen. Auf Grund der Eigenschaft piezoelektrischer Materialien elektrische Energie in mechanische umzuwandeln und umgekehrt, kann man diese sehr gut
in der Aktorik und Sensorik einsetzen. Durch die kompakte Bauform und dem geringen
Gewicht fanden piezoelektrische Wandler rasche Verbreitung in vielen Bereichen, wie der
Ultraschalltechnik (Ultraschallschweißen), Nanopositionierung (Ventile), Ultraschallmotoren und als Sensoren in der Körperschallmesstechnik.
In den letzten Jahren fanden Piezomaterialien immer häufiger Einsatz in Systemen zur
passiven und aktiven Schwingungskompensation.
2.1
Piezoelektrische Koeffizienten
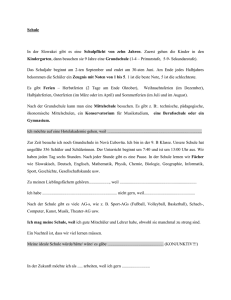
Der Piezoeffekt ist wegen der anisotropen Natur von Piezokeramiken richtungsabhängig.
Zur Festlegung der Richtungen werden die Achsen 1, 2 und 3 eingeführt (analog zu den
X-, Y- und Z-Achsen des kartesischen Koordinatensystems). Die Drehachsen θx , θy und
θz werden mit 4, 5 und 6 bezeichnet. In Bild 2.1 ist das Koordinatensystem eines PiezoElementes beispielhaft dargestellt. Die Polarisationsachse ist die Achse 3.
10
KAPITEL 2. DER PIEZOELEKTRISCHE EFFEKT
Abbildung 2.1: Piezolelektrische Platte
Piezoelektrische Materialien werden durch verschiedene Parameter charakterisiert.
dij Piezomodul [m/V] oder Ladungskoeffizient [C/N] beschreibt die erzeugte relative
Dehnung [m/m] je Einheit angelegtem elektrischen Feld [V/m] oder Ladungsdichte
[C/m2 ] pro Einheit Druck [N/m2 ]
gij Spannungskoeffizienten [m2 /C] oder Feldkoeffizienten [Vm/N]: erzeugtes elektrisches
Feld [V/m] pro Einheit Druck [N/m2 ] oder erzeugte Dehnung [m/m] pro Einheit
Ladungsdichte [C/m2 ]
kij Kopplungskoeffizient [dimensionslos]: Die Kopplungskoeffizienten stellen Energieverhältnisse dar, welche die Umwandlung von mechanischer in elektrische Energie
oder umgekehrt beschreiben. Das Verhältnis von gespeicherter Energie (mechanisch oder elektrisch) zu aufgewendeter Energie (mechanisch oder elektrisch) wird
durch kij2 ausgedrückt.
Andere wichtige Parameter sind der Elastizitätsmodul und die relative Dielektrizitätskonstante, welche die Kapazität des Materials bestimmt.
Um elektrische und mechanische Größen miteinander zu verbinden, werden doppelte
Indizes eingeführt. Der erste Index gibt die Richtung der Erregung, der zweite die Richtung der Reaktion des Systems an. Zusätzlich können die elektrischen oder mechanischen
Randbedingungen durch hochgestellte Indizes beschrieben werden.
• S steht für konstante Dehnung (mechanisch geklemmt)
• T steht für konstanten Druck (nicht geklemmt)
• E steht für konstantes Feld (kurzgeschlossen)
• D steht für konstante dielektrische Verschiebung (elektrisch offen)
11
Kapitel 3
Piezoelektrische
Dämpfungstechniken
Von den unterschiedlichen piezoelektrischen Wandlern, kommen für die Dämpfung von
Leichtbaustrukturen, hauptsächlich piezoelektrische Platten, sogenannte Patches, zum
Einsatz. Dazu werden sie auf die Struktur aufgeklebt. Vorteilhaft ist, dass durch das
geringe Gewicht und Dicke der Platte die Struktur kaum beeinflusst wird. Bei stark gekrümmten Flächen sind sie aber nicht verwendbar. Dann muß auf man auf Piezofolien
(z.B. PVDF) zurückgreifen, welche sich aber eher als Sensoren eignen und als Aktoren
nicht so leistungsfähig sind. Piezoelektrische Stapelaktoren können zwar große Kräfte
übertragen, haben jedoch auch den Nachteil einer sehr großen Steifigkeit und müssen
zudem an einer großen Masse abgestützt werden. Das ist in vielen Fällen unpraktikabel.
Deshalb werden sie hier nicht weiter betrachtet.
Piezolelektrische Platten können durch Anlegen einer Wechselspannung dazu benutzt
werden ein Biegemoment in eine Struktur einzubringen. Somit sind sie geeignet als
Schwingungserreger gezielt Gegenkräfte in die Struktur einzuspeisen, wie es in der aktiven Schwingungsminderung üblich ist.
Andersherum führt ein Biegemoment der Struktur, welches eine Formveränderung der
piezolelektrischen Platte verursacht, zu einer elektrischen Spannung. Durch Anlegen einer externen elektrischen Impedanz, kann die freie Ladung der Piezokeramik abgeleitet
werden. Diese externe Impedanz kann durch passive elektrische Bauteile wie z.B. Spulen,
Wiederstände und Kondensatoren realisiert werden. Durch den Ohmschen Wiederstand
des Schaltkreises wird elektrische Energie in Wärmeenergie umgewandelt. Somit wird
dem System Schwingungsenergie entzogen.
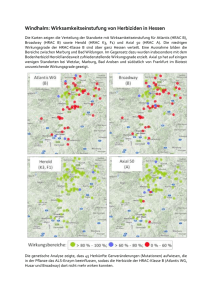
Diese unterschiedlichen Dämpfungstechniken können nach Fleming [21] in verschiedene Gruppen eingeteilt werden und können Bild 3.1 entnommen werden. Bei einer linearen Beschaltung der Piezokeramik, ist das Verhältnis von Strom und Spannung,
also der Impedanz, im betrachteten Frequenzbereich linear. Die linearen Techniken lassen sich in passive und aktive Techniken unterteilen. Der Vollständigkeit halber soll
hier noch erwähnt werden, dass wie von Hagood und von Flotow [2] dargestellt wird,
auch eine Beschaltung mit nur einem Wiederstand möglich ist. Damit kann eine Breitbandige Dämpfung erzielt werden, jedoch nur bei sehr großem Kopplungskoeffizient
kij . Diese werden mit Piezolelektrischen Platten nicht erreicht. Alle anderen passiven
Dämpfungstechniken sind modaler Art.
12
KAPITEL 3. PIEZOELEKTRISCHE DÄMPFUNGSTECHNIKEN
Es gibt auch sogenannte Hybridtechniken [12][13][14][15]. Diese Techniken verbinden
passive und aktive Techniken miteinander. Die linearen Methoden werden in den folgenden Kapiteln beschrieben. Die nicht linearen Methoden werden nicht weiter betrachtet.
Abbildung 3.1: Einteilung der Dämpfungsschaltungen nach Fleming [21]
3.1
Passive Techniken
Die Beschaltung eines Piezo-Elementes mit diskreten passiven elektrischen Bauteilen hat
den Vorteil, dass unter gewissen Umständen keine Stromversorgung wie bei den aktiven
Techniken benötigt wird. Ein weiterer Vorteil ist die recht leichte Anwendbarkeit, da
nicht unbedingt ein Modell des zu dämpfenden Systems benötigt wird. Es wird auch kein
zusätzlicher Sensor benötigt. Instabilitäten, die zu einer Verstärkung der Schwingung
führen, sind nicht möglich. Allerdings ist die erreichte Dämpfung im Vergleich mit den
aktiven Techniken nicht so groß. Es können jedoch auch Dämpfungen der einzelnen
Moden von über 20 dB erreicht werden. In den folgenden Unterkapiteln wird auf die
einzelnen elektrischen Netzwerke und ihre Wirkungsweise eingegangen. Der Schwerpunkt
liegt dabei auf dem 1-modalen Netzwerk von Hagood und von Flotow, da dieses zur
Anwendung kam (vgl. Abb. 3.1 linear-passive-single mode-series).
13
KAPITEL 3. PIEZOELEKTRISCHE DÄMPFUNGSTECHNIKEN
3.1.1
1-modal
Bei der passiven piezoelektrischen Dämpfung stellt das Piezo-Element eine Spannungsquelle und eine Kapazität dar (in Bild 3.2 gestrichelt umrandet dargestellt). Im einfachsten Fall wird an den Kontakten des Piezo-Elementes eine Induktivität und ein
Wiederstand angeschlossen. Dadurch entsteht ein einfach-resonanter Schwingkreis.
Abbildung 3.2: Schwingkreis bestehend aus einem Piezoelement (gestrichelt umrandet) mit
parallel dazu geschaltetem Widerstand RS und Induktivität L
Hagood und von Flotow [2] geben in ihrer Arbeit eine detailierte analytische Ableitung eines piezoelektrischen Dämpfers in Wechselwirkung mit einer ungedämpften
mechanischen Struktur. Um die modale Dämpfung zu berechnen, wird die Mode des zu
dämpfenden Systems vereinfacht durch einen Ein-Massen-Schwinger beschrieben. Das
mit einem elektrischen Schwingkeis beschaltete Piezo-Element (RSP - Resonant Shunted
Piezoelement) ist dabei parallel zur Steife des Systems, wie in Bild 3.3 gezeigt wird.
Abbildung 3.3: Einmassenschwinger gedämpft durch a) ein Piezo-Element beschaltet mit
einem elektrischen Schwingkeis (RSP) und b) einen mechanischem Resonanzabsorber (PMD)
14
KAPITEL 3. PIEZOELEKTRISCHE DÄMPFUNGSTECHNIKEN
Die modale Geschwindigkeit υ des Systems in der Laplace Ebene ist
ν(s) =
F (s)
,
RSP
M s + K/s + Zjj
(s)
(3.1)
mit den modalen Größen Kraft F , Masse M , Steife K und der mechanischen Impedanz
Z RSP der Piezokeramik mit passivem elektrischem Netzwerk. Die elektrische Impedanz
LSU
eines L-R-Netzwerkes ist
i
LSU
(3.2)
i (s) = Ls + R ,
wobei der Index i für die Richtung steht, in der das Piezo-Element gepolt ist, für piezoelekrische Platten normalerweise über die Dicke. Wenn man nun noch die Kapazität
der Piezokeramik einbezieht, welche parallel zum Netzwerk geschaltet ist, ergibt sich die
elektrische Gesamtimpedanz ZiEL zu
ZiEL =
Ls + R
.
T
+ RCpi
s+1
T 2
LCpi
s
(3.3)
Indem man durch die elektrische Impedanz bei offenem Netzwerk teilt, also die Impedanz
des Piezo-Elementes an sich, ergibt sich die dimensionslose elektrische Gesamtimpedanz
Z̄iEL zu
T 2
T
LCpi
s + RCpi
s
ZiEL
Z EL
=
.
(3.4)
Z̄iEL (s) = i D =
T
T 2
T
Zi
1/Cpi
s
LCpi
s + RCpi
s+1
ME
Die dimensionslose mechanische Impedanz Z̄jj
ist nach Hagood und von Flotow [2]
ME
Z̄jj
(s) =
1 − kij2
,
1 − kij2 Z̄iEL
(3.5)
welche von der dimensionslosen elektrischen Gesamtimpedanz Z̄iEL abhängt. kij ist der
elektromechanische Kopplungskoeffizienten mit dem elektrischen Feld in i-Richtung und
der mechanischen Größenänderung der Piezokeramik in j-Richtung. Durch Einsetzen
von (3.4) in (3.5) erhält man die mechanische Impedanz, des mit einem L-R-Netzwerk
beschalteten Piezoelementes
RSP
Z̄jj
(s) = 1 − kij2 (
δ2
)
γ 2 + δ 2 rγ + δ 2
(3.6)
mit
q
S
,
ωe = 1/ LCpi
δ = ωe /ωnE ,
γ = s/ωnE .
(3.7)
(3.8)
(3.9)
Das dimensionslose Frequenzverhältnis δ ist das Verhältnis der elektrischen Resonanzfrequenz ωe zur mechanischen Resonanzfrequenz ωnE des Einmassenschwingers. Die Eigenfrequenz des Systems ωnE wird mit kurzgeschlossenem Piezo-Element gemessen. Die
15
KAPITEL 3. PIEZOELEKTRISCHE DÄMPFUNGSTECHNIKEN
S
Kapazität Cpi
wird bei konstanter Dehnung (eingespannt) gemessen und ist folgendermaßen verknüpft mit der Kapazität bei konstanter Spannung
T
S
Cpi
= Cpi
[1 − kij2 ] .
(3.10)
Die mechanische Impedanz ist nun die dimensionslose mechanische Impedanz geteilt
durch die mechanische Impedanz des Piezo-Elementes ohne Netzwerk bzw. mit geöffnetem
Netzwerk.
1
D
E
Zjj
(s) = (1/s)Kjj
.
(3.11)
1 − kij2
E
Kjj
ist die mechanische Steife des Piezo-Elementes wenn die Kontakte kurzgeschlossen
sind. Für die Übertragungsfunktion des Systems erhält man aus den Gleichungen (3.1)
und (3.6) den Ausdruck
x
γ 2 + δ 2 rγ + δ 2
=
xST
(γ 2 + 1)(γ 2 + δ 2 rγ + δ 2 ) + Kij2 (γ 2 + δ 2 rγ)
(3.12)
mit xST = F/Ktot , wobei Ktot für die modale Gesamtsteife des Systems steht. Der
allgemeine elektromechanische Kopplungskoeffizient Kij ist folgendermaßen definiert
Kij2
kij2
kij2
KijE
)(
) = K̄
.
=(
1 − kij2
K + KijE 1 − kij2
(3.13)
K̄ ist das Verhältnis aus der Steife des kurzgeschlossenen Piezo-Elementes und der Gesamtsteife des Systems. Der Kopplungskoeffizient bringt zum Ausdruck, dass die Steife
des Piezo-Elementes parallel zur Systemsteife ist und ein Teil der Bewegungsenergie des
Systems in elektrische Energie umgewandelt wird. Da sich die Steife des Piezo-Elementes
ändert, wenn die Kontakte offen oder geschlossen sind, ändert sich dementsprechend
auch die Resonanzfrequenz des Systems. Da die Kopplung meist sehr gering ist, ist die
Frequenzverschiebung dementsprechend klein. Nach [2] erhält man folgende Beziehung
Kij2 = {(ωnD )2 − (ωnE )2 }/(ωnE )2 .
(3.14)
Wie schon erwähnt ist ωnE die Resonanzfrequenz des Systems mit kurzgeschlossenem
Piezo-Element und ωnD die Resonanzfrequenz bei geöffneten Kontakten.
Optimierung der Dämpfung
Es gilt nun die optimalen Parameter zu finden, um die Dämpfung zu maximieren
x
zu minimieren. Dazu kann auf bewährte Technibzw. die Übertragungsfunktion xST
ken zurückgegriffen werden. Ein System mit einem Piezo-Element, welches mit einem
elektrischen Schwingkeis beschaltet ist (RSP-resonant shunted piezoelectric), ist vergleichbar mit einem System mit einem mechanischem Resonanzabsorber (PMD-proof
mass damper), wie in Bild 3.3 dargestellt ist.
Auf Grund der Vergleichbarkeit dieser beiden Systeme können Methoden zur Optimierung der Dämpfungsparameter eines PMD-Systems auf ein RSP-System übertragen
16
KAPITEL 3. PIEZOELEKTRISCHE DÄMPFUNGSTECHNIKEN
werden. Zur Berechnung der ”optimalen”Parameter benutzen Hagood und von Flotow eine Technik von Timoshenko, Young und Weaver [22]. Der Ansatz dieser Technik
x
ist, dass sich alle Kurven der Übertragungsfunktion xST
, unabhängig vom Parameter r, in 2 Punkten schneiden. Dies ist allerdings nur der Fall, wenn die strukturelle
Dämpfung gleich null ist. Aus der Lage dieser Schnittpunkte lassen sich die ”optimalen”
Dämpfungsparameter berechnen. Für das ”optimale” dimensionslose Frequenzverhältnis
δopt erhält man
q
(3.15)
δopt = 1 + Kij2 .
Daraus lässt sich die Induktivität der Spule bestimmen
Lopt =
1
S
ωe2 Cpi
=
1
.
S
(δopt ωe )2 Cpi
(3.16)
Der ”optimale” elektrische Dämpfungsparameter ropt ist
ropt =
√
2
Kij
,
1 + Kij2
(3.17)
woraus sich der ”optimale” Widerstand Ropt berechnen lässt.
Ropt =
ropt
.
S
ωnE Cpi
(3.18)
Es gibt natürlich auch andere Techniken, um die optimalen Parameter zu berechnen.
Insbesondere wenn man die Dämpfung mit berücksichtigt, ist eine geschlossene Lösung
nicht mehr möglich und man muss auf numerische Lösungen zurückgreifen. Für schwach
gedämpfte Strukturen ist der Fehler der oben beschriebenen Methode durch die Vernachlässigung der Dämpfung jedoch sehr gering.
Da die strukturelle Dämpfung einen entscheidenden Einfluss auf die Dämpfbarkeit einer Mode hat, soll sie hier berücksichtigt werden. Nach Hollkamp [3] erweitert man
Gleichung 3.12 zu
γ 2 + δ 2 rγ + δ 2
x
=
xST
(γ 2 + 2ζγ + 1)(γ 2 + δ 2 rγ + δ 2 ) + Kij2 (γ 2 + δ 2 rγ)
(3.19)
mit ζ als mechanischem Dämpfungsparameter des Systems.
x
in Abhängigkeit von r kann man weiterZur Minimierung der Übertragungsfunktion xST
hin Gleichung (3.18) benutzen. Mit der in MATLAB implementierten Funktion ”fminimax”
lässt sich das Minimierungsproblem sehr einfach numerisch lösen. Diese Funktion basiert
auf der SQP Methode (sequential quadratic programming).
In Bild 3.4 sind die Ergebnisse der Übertragungsfunktion (3.12) für unterschiedliche
elektrische Dämpfungsparameter r dargestellt. Für den elektromechanischen Kopplungskoeffizienten wurde Kij =0,06 gewählt. Mit der Methode von Hagood und von Flotow
erhält man für ropt =0,0845 und mit der Funktion ”fminimax” erhält man rSQP =0,090 ,
wodurch man eine geringfügig besseren Verlauf der Übertragungsfunktion erhält.
Um denn Einfluss der Dämpfung zu verdeutlichen sind in Bild 3.5 die Ergebnisse für das
17
KAPITEL 3. PIEZOELEKTRISCHE DÄMPFUNGSTECHNIKEN
gleiche System, aber mit einer Dämpfung von ζ=0,04 und Gleichung (3.19) berechnet,
dargestellt. Mit der Funktion ”fminimax” erhält man rSQP =0,0744 und ropt ändert sich
natürlich nicht. Das Ergebnis zeigt, dass auch bei Dämpfung die Methode von Hagood
und von Flotow zur Abschätzung der optimalen Parameter gute Ergebnisse liefert. Die
durch rSQP und ropt gefundenen Übertragungsfunktionen unterscheiden sich so gut wie
nicht.
Die maximal zu erreichende Dämpfung nimmt mit zunehmender struktureller Dämpfung
stark ab. Schon bei einer Dämpfung von 4% des Systems kann nur eine zusätzliche
Dämpfung von maximal 3dB erreicht werden (mit Kij =0,06). Bei stark gedämpften
Systemen kann eine zusätzliche Dämpfung nur durch unrealistisch hohe Kopplungskoeffizienten erreicht werden.
Abbildung 3.4: Einfluß des elektrischen Dämpfungsparameters r auf ein ungedämpftes mechanisches System
18
KAPITEL 3. PIEZOELEKTRISCHE DÄMPFUNGSTECHNIKEN
Abbildung 3.5: Einfluß des elektrischen Dämpfungsparameters r auf ein gedämpftes System
mit dem mechanischen Dämpfungsparameter ζ=0,1
Da man in der Praxis meistens mehrere Moden gleichzeitig dämpfen will, benötigt man
für jede Mode je ein Piezo-Element mit je einem auf die jeweilige Mode abgestimmten
Resonanzkreis. Das ist nicht immer erwünscht oder praktikabel, da es zu ungewollten
Veränderungen der zu dämpfenden Struktur kommen kann oder kein Platz da ist die
benötigte Anzahl von Piezo-Elementen unterzubringen.
3.1.2
Multimodal
Damit man mit einem Piezo-Elementen mehrere Moden gleichzeitig dämpfen kann, muß
der einfach resonante Schaltkreis zu einem multiresonanten Schaltkreis erweitert werden. Dafür gibt es verschiedene Ansätze, welche hier nur kurz erläutert werden, da sie
in dieser Untersuchung nicht eingesetzt wurden.
Hollkamp Schaltkreis
Hollkamp [3] erweiterte den einfachen R-L-Schaltkreis durch je einen dazu parallel geschalteten C-R-L-Schaltkreis je zusätzlich zu bedämpfender Mode (Bild 3.6).
19
KAPITEL 3. PIEZOELEKTRISCHE DÄMPFUNGSTECHNIKEN
Abbildung 3.6: 3-modaler current-flow Schaltkreis nach Hollkamp [3]
Da sich die Parallelschaltkreise alle gegenseitig beeinflussen, kann nicht jeder Schaltkreis für sich optimiert werden. Die optimalen Dämpfungsparameter können nur numerisch gefunden werden, was auf Grund der Anzahl der Parameter schwer lösbar ist.
current-block Schaltkreis
Wu [27][28] fügt in jeden Parallelschaltkreis sogenannte ”current-block” Schaltkreise ein.
Die schattiert dargestellten current-block Schaltkreise in Bild 3.7 werden auf die benachbarte Mode abgestimmt, um den Parallelschaltkreis zu entkoppeln. Die Anzahl dieser
Antiresonanzschaltkreise hängt von der Anzahl der gleichzeitig zu dämpfenden Moden
ab. Das Beispiel in Bild 3.7 zeigt einen Schaltkreis zur Bedämpfung von 2 Moden. R1
und L1 sowie R2 und L2 werden so eingestellt, dass die elektrische Resonanzfrequenz
mit der jeweils zu bedämpfenden Mode des mechanischen Systems übereinstimmt. Die
current-block Schaltkreise Ĉ1 und L̂1 sowie Ĉ2 und L̂2 werden auf die Resonanzfrequenz des benachbarten Parallelschaltkreis eingestellt. Die steigende Komplexität mit
zunehmender Modenanzahl beschränkt diese Technik auf maximal 3 Moden.
Abbildung 3.7: 2-modaler current-block Schaltkreis nach Wu [27]
20
KAPITEL 3. PIEZOELEKTRISCHE DÄMPFUNGSTECHNIKEN
current-flow Schaltkreis
Behrens und Moheimani [4][5] schlagen ein sogenanntes ”current-flow” Netzwerk vor. In
jeden i-ten Parallelschaltkreis wird ein current-flow Schaltkreis, bestehend aus Ci − L̂i ,
eingefügt. Jeder i-te current-flow Schaltkreis ist so eingestellt, dass er einen Kurzschluss
für die i-te zu dämpfende Mode darstellt und für alle anderen Moden einen elektrisch
offenen Schaltkreis. Ri und Li von jedem Parallelschaltkreis können auf die i-te zu
dämpfende Mode abgestimmt werden, wie beim einfach resonanten Schwingkreis. Das
vereinfacht die Optimierung des Netzwerkes erheblich. Auch die Komplexität des Netzwerkes steigt nur linear mit der Anzahl der Moden, wodurch es möglich wird eine große
Anzahl von Moden gleichzeitig zu dämpfen. In [5] wurden z.B. 5 Moden einer Platte gleichzeitig gedämpft. In Bild 3.8 ist ein Beispiel für einen 3-modalen current-flow
Schaltkreis dargestellt.
Abbildung 3.8: 3-modaler current-flow Schaltkreis nach Behrens und Moheimani[30]
series-parallel Schaltkreis
Fleming und Moheimani [6] schlagen vor die einzelnen Schaltkreise zur Dämpfung einer
Mode nicht wie bisher parallel sondern in Reihe zu schalten. Jeder Schaltkreis besteht
wiederum aus zwei parallel zueinander geschalteten Schaltkreisen: einem current-block
Schaltkreis Ĉi − L̂i und dem Dämpfungsnetzwerk Li − Ri zur Dämpfung der i-ten Mode.
Diese beiden Schaltkreise werden auf die gleiche Resonanzfrequenz eingestellt. Bei dieser Frequenz ist die Impedanz des current-block Schaltkreis sehr groß und alle anderen
current-block Schaltkreise haben eine kleine Impedanz. Dafür müssen die einzelnen Resonanzfrequenzen natürlich weit genug auseinander liegen. Der Strom kann also durch
alle anderen current-block Schaltkreise hindurch fließen, nur bei der jeweiligen Resonanzfrequenz wird der Strom gezwungen, durch das Dämpfungsnetzwerk zu fließen. Der
Vorteil des series-parallel Schaltkreises ist, dass die Kapazitäten Ĉi frei wählbar sind.
Dadurch werden die Größen der Induktivitäten stark verringert. Das ist in den anderen
Schaltungen ein Problem, da die Kapazität des Piezo-Elementes meistens sehr klein ist
und dies bei der Dämpfung von tieffrequenten Moden zu unrealistisch großen Induktivitäten führen kann.
21
KAPITEL 3. PIEZOELEKTRISCHE DÄMPFUNGSTECHNIKEN
Abbildung 3.9: 2-modaler series-parallel Schaltkreis nach Behrens und Moheimani [6]
Synthetische Impedanz
Die bisher betrachteten 1-modalen und multimodalen Netzwerke bestehen alle aus passiven elektrischen Bauteilen, also Spulen, Kondensatoren und Widerständen. Die Realisierung solcher Netzwerke scheint auf den ersten Blick nicht sonderlich schwierig zu sein.
Doch wie schon im Abschnitt 3.1.2 erwähnt wurde, benötigt man insbesondere bei der
Dämpfung tieffrequenter Moden sehr große Induktivitäten bis hin zu 1000 Henry. Realistisch handhabbare Spulen haben aber normalerweise Induktivitäten weit unter 1 Henry.
Außerdem kann die Induktivität nur sehr schwer verändert werden, was aber nötig ist,
um die Resonanzfrequenz des Schwingkreises auf die entsprechende Mode abzustimmen.
Deshalb werden mit Gyrator-Schaltkreisen Induktivitäten simuliert. Diese Schaltkreise
sind nicht leicht zu handhaben und stellen auch meist nur ein schlechtes Abbild einer
idealen Spule dar. In Kapitel 4.1.1 wird ausführlich auf Gyratoren eingegangen.
Eine weitere Schwierigkeit, stellt die Hochspannung von bis zu 200 V dar, die von dem
Piezo-Element erzeugt werden können. Deshalb müssen die Bauteile des Schaltkreises
für Hochspannung ausgelegt sein.
Diese Nachteile umgehen Fleming, Behrens und Moheimani [7] [8] [9] [10] indem sie
einen Digitalen Signalprozessor DSP benutzen, um die elektrische Impedanz, die am
Piezoelement anliegt, zu synthetisieren. Aus der erwünschten Impedanz Z(s) und dem
gemessenen Stromfluss IZ (s) lässt sich die erforderliche Spannung VZ (s) errechnen (Bild
3.10(a)).
VZ (s) = Z(s)IZ (s)
(3.20)
Man kann natürlich auch anders herum die Spannung VZ (s) messen und den Stromfluss
regulieren (Bild 3.10(b)).
Komplexe multimodale Schaltungen, die Alterungsprozessen unterliegen und sich elektrisch nicht ideal verhalten und anfällig gegenüber Umwelteinflüssen (Temperatur, Alterungsprozesse usw.) sind, können somit durch einen DSP ersetzt werden. Bild 3.11
zeigt eine von Fleming, Behrens und Moheimani verwendete Schaltung mit einer spannungskontrollierten Stromquelle (schattiert dargestellt). Durch diese Technik geht der
passive Charakter allerdings weitestgehend verloren. Vorteilhaft gegenüber aktiven Maß22
KAPITEL 3. PIEZOELEKTRISCHE DÄMPFUNGSTECHNIKEN
nahmen werden auch die Stabilität und die Möglichkeit sich dem mechanischen System
unter Umständen schnell anpassen zu können, genannt.
Abbildung 3.10: (a) Impedanz-Synthese (b) Admittanz-Synthese
Abbildung 3.11: Synthetische Admittanz mit einer spannungskontrollierten Stromquelle
(schattiert dargestellt)
3.2
Aktive Techniken
Die Prinzipien der aktive Schwingungsminderung sollen an dieser Stelle als bekannt
vorausgesetzt werden. Als Aktoren werden Piezoelektrische Platten benutzt. Die einzige
aktive Methode die spezifisch für Anwendung von Piezo-Elementen als Aktoren entworfen wurde, ist die Methode der ”Negativen Kapazität”. Die Idee dabei ist, dass die
optimale elektrische Impedanz die am Piezo-Element anliegt vom Betrag her gleich ist
aber mit entgegengesetzter Phase. Näheres dazu ist der Literatur [11][29] zu entnehmen.
Mit der aktive Schwingungsminderung werden im allgemeinen bessere Ergebnisse erzielt
als mit passiven Methoden. Speziell bei der Verwendung von Piezo-Elementen ist, dass
diese mit Hochspannung bis zu 200 V betrieben werden müssen, was einen zusätzlichen
hohen technischen Aufwand erfordert. Da in dieser Untersuchung ein Feedback-System
benutzt wurde, werden an dieser Stelle kurz die Grundlagen dargestellt.
23
KAPITEL 3. PIEZOELEKTRISCHE DÄMPFUNGSTECHNIKEN
3.2.1
Feedback
Im Bild 3.12 ist das Blockdiagramm einer Feedbackschleife dargestellt. D(s) ist das
Primärsignal welches mit einem Sekundärsignal so überlagert werden soll, dass E(s)
möglichst null ergibt. W (s) ist die Übertragungsfunktion der Regelstrecke (z.B. Phasenschieber, Filter, Verstärker) und C(s) ist die Übertragungsfunktion der Struktur. Für
E(s)
die Störübertragungsfunktion D(s)
erhält man
E(s) = D(s) + (C(s)W (s)E(s))
D(s) = E(s)(1 − C(s)W (s))
1
E(s)
=
D(s)
1 − (C(s)W (s))
Wenn man die Störfunktion gegen null gehen lässt, muss W (s) gegen Unendlich gehen.
W (s) → ∞ y
E(s)
→0
D(s)
(3.21)
In der Praxis ist die Verstärkung des Signals natürlich beschränkt durch die maximal
mögliche technische Verstärkung, was somit auch die Dämpfung begrenzt. Das System
wird instabil, wenn |W (s)C(s)| ≥ 0dB und die Phase von W (s)C(s) ein ganzahliges
Vielfaches von 2π ist.
Abbildung 3.12: Blockschaltbild eines Feedbacksystems
24
Kapitel 4
Versuchsaufbau
Die Versuche wurden an einem ruhenden, frei hängenden Radsatz sowie an einem in
einen Prüfstand eingebauten sich drehenden Radsatz durchgeführt.
4.1
Versuchsaufbau bei frei hängendem Radsatz
Das Radsatzmodell wurde für die stationäre Untersuchung an einem Stahlseil in der
Prüfhalle des Institutes aufgehängt. Das Seil war an der Achse befestigt, so dass diese senkrecht zum Fußboden hing. Das untere Rad des Radsatzes wurde am Radkranz
in axialer Richtung (90◦ zur Radscheibe) mit einem Schwingerreger angeregt. Die Anregung wurde mit einem Kraftaufnehmer Type 8200 von Brüel und Kjær gemessen.
Obwohl die Anregung in der Realität radial erfolgt, wurde die axiale Richtung gewählt.
Die Moden lassen sich in Abhängigkeit von der Anregerichtung unterschiedlich gut anregen [32]. Plattenschwingungen, welche starke axiale Bewegungsanteile aufweisen, sind
für die Schallabstrahlung besonders interessant. Diese Moden lassen sich besonders gut
in axialer Richtung anregen.
An 3 Punkten des Rades wurde mit Beschleunigungsaufnehmern Type 4393 von Brüel
und Kjær die Beschleunigung gemessen. Zwei Punkte in axialer Richtung und ein Punkt
in radialer Richtung. Die Lage der Messpunkte sind Bild 4.1 zu entnehmen. Zusätzlich
wurde in einigen Fällen noch an zwei Punkten der Schalldruck gemessen. Beide Punkte
lagen 50 cm vom Achsmittelpunkt entfernt. Mikrofon 1 lag 45◦ zur Radebene und Mikrofon 2 lag 0◦ zur Radebene.
Als Messsystem diente ein HP35650 mit 6 Kanälen. Alle Ergebnisse, falls nicht anders
angegeben, sind Transferadmittanzen, also entweder p/VF oder ν/VF . Da der Schwingerreger keine ideale rückwirkungsfreie Kraftquelle darstellte, gab es insbesondere bei
Moden mit starken axialen Radkranzbewegungen einen Kraftverlauf mit Resonanz und
Antiresonanz in den Radsatzmoden. Das verfälschte die Transferadmittanzen und konnte auch durch leistungfähigere Schwingerreger nicht behoben werden. Deshalb wurde als
Bezugsgröße das am Schwingerreger anliegende Spannungssignal VF gewählt.
Auf der Innenseite des unteren Rades wurden 2 Piezo-Elemente des Typs ACX QP-10W
aufgeklebt. Dazu wurde Kleber HBM X60 für Dehnmessstreifen verwendet. Die beiden
piezolelektrischen Platten wurden so angeordnet, dass sie einander gegenüberliegen. Die
Längsdehnung des Piezo-Element 1 (PZT 1) erfolgte in Richtung des Radius und Piezo25
KAPITEL 4. VERSUCHSAUFBAU
Element 2 (PZT 2) dehnte sich senkrecht zum Radius (in der Scheibenebene). Für die
Positionierung in Abhängigkeit vom Abstand vom Mittelpunkt gab es keinen Spielraum
zwischen Radkranz und Achse. Den prinzipiellen Versuchsaufbau zeigt Bild 4.
Abbildung 4.1: Versuchsaufbau des stationären Radsatzes, M1-M3 kennzeichnen die Messpunkte
Die Piezo-Elemente wurden bei der passiven Schwingungsminderung jeweils mit einem
einfach-resonanten R-L-Schaltkreis beschaltet. Die Induktivität wurde von einer Gyratorschaltung synthetisiert. Diese wird in dem folgenden Abschnitt 4.1.1 näher beschrieben.
Bei der aktiven Schwingungsminderung wurde das Piezo-Element 2 als Feedbacksensor und das Piezo-Element 1 als Schwingerreger benutzt. Das Feedbacksignal wurde
mittels Schmalbandfilter (multimetrics AF-220) gefiltert. Als Anfangseinstellung wurde als Mittenfrequenz die jeweils zu bedämpfende Mode eingestellt. Die Phase konnte
mit einem Phasenschieber (PCB 780) verändert werden. Verstärkt wurde das Signal
durch einen geeigneten Verstärker (ACX Quickpack Power Amplifier) mit einer maximalen Ausgangsspannung von 200 V und einer maximal 20fachen Verstärkung des
Eingangssignals. Da das Sensorsignal kleiner als 2 Volt war, wurde dieses noch durch
einen Vorverstärker (B&K 2713) verstärkt. Das Sensorsignal wurde zusätzlich durch ein
Oszilloskop sichtbar gemacht, um es minimieren zu können.
Abbildung 4.2: Versuchsaufbau des Feedbacksystems
26
KAPITEL 4. VERSUCHSAUFBAU
4.1.1
Gyratoren
Wie schon erwähnt, sind Induktivitäten schwierig herzustellen. Mit Hilfe eines Gyrators
ist es möglich, mit einer Kapazität die Wirkung einer Induktivität zu erzeugen. Diese
Schaltung kann an Stelle einer Spule eingesetzt werden.
2
Die Resonanzfrequenz des Schwingkreises ωel
= 1/LCpi wird bestimmt durch die Kapazität Cpi des Piezo-Elementes und der Induktivität L des Schaltkreises. Da die Kapazität
Cpi nicht veränderbar ist, muss L so variiert werden, dass man die gewünschte Resonanzfrequenz erhält. Die Kapazitäten von Piezoelektrischen Platten sind sehr klein und
bei der Dämpfung von tieffrequenten Moden ergeben sich somit zwangsläufig sehr große
Induktivitäten. Die in diesem Versuch verwendeten Piezoelektrischen Platten haben laut
Herstellerangaben eine Induktivität von Cpi = 0, 1µF . Bei einer Resonanzfrequenz von
fres = 347Hz ergibt sich für die Induktivität L = 2, 1H. Da solch ein Wert mit einer
gewöhnlichen Spule nicht realisierbar ist und außerdem die Induktivität schwer regelbar
ist, wird ein Gyrator benutzt.
Es gibt eine recht große Anzahl von verschiedenen Gyratoren. In Bild 4.3 sind 3 verschieden Schaltungen dargestellt. Die Schaltung (a) wurde z.B. von Ahmadian und Jeric
[16] benutzt und wird von Lynch in [33] etwas genauer beschrieben. Die Induktivität
berechnet sich folgendermaßen
R1 R3 R4
L=
C1
(4.1)
R2
Indem man den Widerstand R2 durch einen Potentiometer regelbar macht, kann man
die Induktivität theoretisch beliebig einstellen. Beim Testen dieses Gyrators wurde allerdings festgestellt, dass es sehr auf das Verhältnis der Kapazität C1 und den Widerständen
ankommt, ob die Schaltung das gewünschte Ergebnis liefert oder nicht. Da in der Literatur keine Details über den Arbeitsbereich der einzelnen Bauteile zu finden waren,
wurden auch andere Gyratorschaltungen ausprobiert. Die Schaltung (b) wurde von [12]
benutzt, lieferte aber in dieser Arbeit aus ungeklärten Gründen keine brauchbaren Ergebnisse.
Letztendlich wurde die Gyratorschaltung (c) verwendet. Diese Schaltung benötigt nur
einen Operationsverstärker, einen Kondensator und 2 Widerstände. Die Induktivität
berechnet sich folgendermaßen
L = CR1 (R2 − R1 )
(4.2)
Für R2 ≫ R1 vereinfacht sich die Gleichung zu
L = CR1 R2
(4.3)
In dem man wieder den Wiederstand R2 durch einen Potentiometer regelbar macht,
kann man die Induktivität theoretisch beliebig einstellen. Dies funktionierte auch in
den Vorversuchen sehr gut, so dass diese Schaltung ausgewählt wurde und in allen
Versuchen benutzt wurde. Die Widerstände R1 und R2 konnten durch Potentiometer
eingestellt werden. Bei R2 wurden 2 Potentiometer in Reihe geschaltet, ein Potentiometer mit großem Ohmbereich (0-220kΩ) und dem anderen Potentiometer (0-10kΩ) zur
Feineinstellung des Widerstandes. Für die Kapazität C wurde 0,22 µF gewählt.
Die Gleichung (4.2) lieferte in der Praxis nur halbwegs befriedigende Ergebnisse. Die
27
KAPITEL 4. VERSUCHSAUFBAU
durch die Induktivität eingestellten Resonanzen lagen in der Praxis zum Teil 20% neben dem theoretischen Wert. Das liegt wahrscheinlich daran, dass bei einem sehr klein
gewählten R1 schon geringe Abweichungen, wie nicht beachtete Leitungswiderstände,
großen Einfluss auf die Induktivität haben.
Die Gyratorschaltung stellt im Schwingkreis keine ideale Induktivität dar sondern
ist verlustbehaftet und stellt somit auch gleichzeitig einen Widerstand dar. Dies ist insofern von Interesse, da zur optimalen Schwingungsdämpfung der Wiederstand RS des
Schwingkreises optimal eingestellt werden muss. Der Widerstand RS eines Schwingkreises gibt die Dämpfung ζe der elektrischen Resonanzfrequenz an. Die Dämpfung ζe wird
öfters auch mit der Güte Q des Schwingkreises angegeben.
Q=
1
ζe
(4.4)
Die Güte Q des Schwingkreises hängt stark von den beiden Widerständen R1 und R2
ab. Eine hohe Güte lässt sich erreichen, wenn R1 sehr kein (< 30Ω) und R2 sehr groß
(> 100kΩ) gewählt wird. Die Güte Q lässt sich folgendermaßen berechnen
r
1
L
Q=
(4.5)
RS C
oder aber aus der Messung der Bandbreite B bzw. der Dämpfung ζe der elektrischen
Resonanz bestimmen.
f0
1
Q=
=
(4.6)
B
ζe
Aus der gemessenen Dämpfung ζe der elektrischen Resonanz des Schwingkeises, bestehend aus dem Gyrator und dem Piezo-Element, lässt sich somit der Wiederstand RS
des Schwingkreises berechnen.
RS =
ζe
ω0 Cpi
(4.7)
Die Güte des Schwingkreises hängt weiterhin von den Verlusten des Kondensators ab
und wahrscheinlich auch vom Operationsverstärker.
28
KAPITEL 4. VERSUCHSAUFBAU
Abbildung 4.3: Gyratoren unterschiedlicher Bauart ((a) aus [16][33], (b) aus [12], (c) aus
[34])
29
KAPITEL 4. VERSUCHSAUFBAU
4.2
Versuchsaufbau des Radprüfstandes
Beim 2. Teil der Untersuchung stand ein Radprüfstand zur Verfügung. Über einen
Elektromotor konnte die Drehung des Rades stufenlos eingestellt werden. Die Anregung erfolgte über ein zweites Rad, welches auf dem Eisenbahnrad auflag und sich
mitdrehen konnte. Dieses Rad, im folgenden Schienenrad genannt, soll die Anregung
der Schiene simulieren. Beide Seiten des Schienenrades wurden mit Entdröhnbelag beschichtet. Das hatte allerdings nur begrenzt Erfolg wie man in Kapitel 6.2 an den
Messergebnissen sehen kann. Die Messkanäle und die Hochspannungssignale der Piezoelemente wurden getrennt über einen 8-Kanal-Quecksilberdrehübertrager und einen
4-Kanal-Quecksilberdrehübertrager übertragen. Laut Herstellerangaben können Signale
bis 60 V übertragen werden, deshalb wurde die Stärke des Feedbacksignals auf maximal
100 V beschränkt. Wie im Vorversuch wurden auf der Innenseite des Rades 2 PiezoElemente des Typs ACX QP-10W aufgeklebt. Die Anordnung der Piezoelemente zueinander wurde nicht verändert. Auch das Messsystem, der Aufbau der passiven und aktiven
Dämpfungstechniken wurden nicht verändert. Als Feedback-Sensor wurde diesmal nicht
ein Piezoelement sondern der Beschleunigungsaufnehmer am Messpunkt 2 gewählt, denn
die Übertragung der Hochspannungssignale mit dem Quecksilberdrehübertrager erwies
sich als problematisch. Es konnte ein Übersprechen zwischen den einzelnen Kanälen
beobachtet werden. Deshalb wurden die Hochspannungssignale der Piezoelemente über
einen seperaten Drehübertrager, getrennt von den Messsignalen, übertragen.
Abbildung 4.4: Radprüfstand mit eingebautem Radsatz und Schienenrad (schwarz)
30
Kapitel 5
Das Radsatzmodell
Die Messungen wurden an einem Radsatzmodell im Maßstab 1:4 durchgeführt. Dieses
und andere Radsatzmodelle wurden in dem Forschungsvorhaben zur ”Akustischen Optimierung von Radkenndaten für Schienenfahrzeuge” [31] schon eingehend auf Schwingungsformen und Abstrahlverhalten untersucht. Auf diese Daten konnte größtenteils
zurückgegriffen werden. Das Radsatzmodell entspricht einem Eisenbahnradsatz der Bauart 92. Es ist aber bezüglich der Scheibenebene symmetrisch aufgebaut, d.h. es verfügt
nicht wie in der Realität über einen Sturz. Die Abmessungen des verwendeten Modells
sind in Tabelle 5.1 aufgelistet.
Radsatzmodell
Abmessung
Laufkreisdurchmesser
230 mm
Radkranzdicke
12,5 mm
Radkranzbreite
34 mm
Scheibendicke
6,5 mm
Nabeninnendurchmesser
47,5 mm
Nabenbreite
42 mm
Tabelle 5.1: Abmessungen des Radsatzmodelles
Aufgrund des Maßstabes 1:4 des Radsatzmodelles sind die einzelnen Resonanzfrequenzen um den Faktor 4 größer als sie bei Orginalgröße des Radsatzes auftreten würden.
Zur Klassifizierung der Schwingungsformen das Radsatzes bzw. des Rades werden folgende Schwingungstypen [31] übernommen:
P(m,j) Plattenschwingungen mit m Knotendurchmessern und j Knotenkreisen. Diese
Moden weisen hauptsächlich Schwingungen in axialer Richtung auf.
S(m,j) Scheibenschwingungen mit m Knotendurchmessern und j Knotenkreisen. Diese
Moden weisen hauptsächlich Schwingungen in radialer Richtung auf.
BA(m) Biegeschwingungen der Achse mit m Knoten.
LA(m) Longitudinale Schwingungen der Achse mit m Knoten
31
KAPITEL 5. DAS RADSATZMODELL
Durch Unsymetrien des Radkranzes sind Plattenschwingungen und Scheibenschwingungen miteinander gekoppelt und verursachen auch in die jeweils andere Richtung
Schwingungen. Moden mit nur einem Knotendurchmesser m = 1 verursachen immer
auch Biegebewegungen der Achse, so dass beide Räder miteinander gekoppelt sind. Bei
Moden mit mehr als einem Knotendurchmesser m > 1 schwingen die Räder autonom
und sind nicht über die Achse miteinander gekoppelt. Alle Moden sind axial/radial unterschiedlich gut anregbar und tragen unterschiedlich stark zum Abstrahlungsverhalten
bei. Verallgemeinernd lässt sich sagen, dass Plattenschwingungen besonders gut axial
und Scheibenschwingungen besonders gut radial anregbar sind. Moden mit starken axialen Bewegunganteilen sind für die Schallabstrahlung besonders relevant.
5.1
Eigenfrequenzen des frei hängenden Radsatzes
Der frei hängende Radsatz wurde auf seine Eigenfrequenzen hin untersucht. Dazu wurden die Transferadmittanzen der radialen als auch der axialen Schnelle νr bzw. νa in
Bezug zu dem am Schwingerreger anliegende Spannungssignal VF gemessen. Weiterhin
wurde auch die Transferadmittanz des Schalldrucks (in 0,5 m Entfernung und 45◦ zur
Scheibenebene) in Bezug zu dem am Schwingerreger anliegende Spannungssignal VF
gemessen. In Bild 5.1 sind die Transferadmittanzen des Radsatzes bei (a) axialer und
(b) radialer Anregung dargestellt. Die ersten 6 Moden liegen bei 347Hz, 437Hz, 653Hz,
860Hz, 904Hz und 1304Hz. Sie lassen sich sowohl radial als auch axial anregen. Die 2.,
3. und 4. Mode tragen besonders zur Schallabstrahlung bei. Den Moden können folgende Schwingungsformen zugeordnet werden: 347Hz ↔ P (1, 0)A , 437Hz ↔ P (1, 0)S ,
653Hz ↔ P (0, 0), 860Hz ↔ P (0, 1)A , 904Hz ↔ P (0, 1)S und 1304Hz ↔ P (2, 0). Die
Indizes A und S stehen für antisymmetrisch bzw. symmetrisch bezüglich des Achsschwerpunktes. Zur Identifizierung der Moden wurde trockener, feiner Sand auf die
Radscheibe aufgebracht und der Radsatz jeweils in der entsprechenden Eigenfrequenz
angeregt. Durch die Radschwingung wandern die Sandkörner von Orten starker Auslenkung zu Orten geringer Auslenkung. Die so sichtbar gemachten Knotenlinien werden
Chladnische Klangfiguren genannt. Die Ergebnisse sind in Bild 5.2 dargestellt. In Bild
5.3 sind die Modenformen schematisch dargestellt. Die Knotenlinien sind durch eine rote Linie gekennzeichnet. Auf der rechten Seite der Radscheibe befindet sich jeweils das
Piezo-Element 1 und der Messpunkt M 1, auf der linken Seite das Piezo-Element 2 und
der Messpunkt M 2. Die 3. Mode ist nicht dargestellt, da sie über keine Knotenlinien
verfügt. Die 4. Mode zeigt Ansätze eines Knotendurchmessers, was eher untypisch ist.
Sie wurde trotzdem als P(0,1) Mode klassifiziert.
Die ersten 6 Moden sind für die Schallabstrahlung weitestgehend unwichtig. Sie wurden
dennoch gewählt, da für die aktive Schwingungsdämpfung besonders tieffrequente Moden in Frage kommen. In dieser Untersuchung geht es vorrangig darum ob und wie gut
man Moden in Abhängigkeit von ihrer Schwingungsform mit Hilfe von piezolelektrischen
Platten dämpfen kann. Die Relevanz für die Schallabstrahlung wird zwar betrachtet, ist
aber kein Auswahlkriterium für die einzelnen Moden gewesen.
32
KAPITEL 5. DAS RADSATZMODELL
Abbildung 5.1: Transferadmittanzen Y des Radsatzes bei (a) axialer und (b) radialer Anregung (νr≡radiale Schnelle, νa≡axiale Schnelle, p≡Schalldruck (in 0,5m Entfernung und 45◦
zur Scheibenebene))
33
KAPITEL 5. DAS RADSATZMODELL
Abbildung 5.2: Modenformen der ersten 6 Moden (axial)
34
KAPITEL 5. DAS RADSATZMODELL
Abbildung 5.3: Radsatzmoden, Knotendurchmesser und -kreise (rot dargestellt) in Bezug
zur Lage der Messpunkte und den piezolelektrischen Platten
35
KAPITEL 5. DAS RADSATZMODELL
5.2
Eigenfrequenzen des rollenden Radsatzes
Eine Radscheibe des Radsatzes, welcher in den Radprüfstand eingebaut wurde, wurde
durch eine Keilriemenscheibe ersetzt. Obwohl es sich somit nicht mehr um ein vollständiges
Radsatzmodell handelt, soll es an dieser Stelle der Einfachheit halber weiterhin Radsatz
genannt werden.
Die Eigenfrequenzen und die dazugehörigen Modenformen wurden in einer Voruntersuchung bestimmt. Dazu wurde der ausgebaute Radsatz des Prüfstandes frei hängend
untersucht. Dabei wurde genauso vorgegangen wie im vorhergehenden Abschnitt 5.1 beschrieben. Danach wurden die Eigenfrequenzen des Radsatzes im eingebauten Zustand
bestimmt und mit den zuvor bestimmten Eigenfrequenzen verglichen.
Beim rollenden Radsatz tritt hauptsächlich, wie man in Bild 5.4 erkennen kann, die
Mode bei 1428 Hz auf. Dabei handelt es sich um die P (2, 0) Modenform, wie im Vorversuch festgestellt wurde. Das ist die erste Modenform bei der die Radscheibe vom Rest
des Radsatzes entkoppelt ist. Die tieffrequenteren Moden können durch die veränderten
Randbedingungen in der Form nicht mehr auftreten, da der Radsatz nun nicht mehr frei
schwingen kann, da er an 2 Punkten fest eingespannt ist. Das Schienenrad (siehe Kapitel 4.4) hat im dargestellten Frequenzbereich einen Einfluss insbesondere ab 800 Hz.
Einerseits stellt es eine Veränderung der Randbedingung dar: das Eisenbahnrad kann
am Kontaktpunkt nicht mehr unbehindert schwingen. Andererseits ist das Schienenrad
nicht vollständig gedämpft und regt das Eisenbahnrad in seinen eigenen Eigenfrequenzen
besonders stark an. Zum Vergleich zum rollenden Rad wurden in Bild 5.4 zwei Schnellespektren des ruhenden (eingebauten) Radsatzes einmal ohne und einmal mit Kontakt
zum Schienenrad dargestellt. Das ruhende Rad wurde mit einem Impulshammer angeregt. Man sieht in allen 3 Fällen gut die Mode bei 1428 Hz auftreten. Im übrigen
Frequenzbereich gibt es allerdings keine weiteren nennenswerten Übereinstimmungen.
Abbildung 5.4: Schnellespektrum des Radsatzes rollend mit Schienenrad sowie ruhend mit
und ohne Schienenrad (mit Impulshammer angeregt)
Sehr interessant an der P(2,0) Mode ist, dass sie, vom ruhenden Beobachter aus gesehen,
feststeht. Am Anregepunkt des Rades befindet sich ein Schnellemaximum der Mode. Da
36
KAPITEL 5. DAS RADSATZMODELL
der Anregepunkt vom ruhenden Beobachter aus gesehen, feststeht, kann sich die Modenform nicht mit dem Rad mitdrehen. Das Rad mit Beschleunigungsaufnehmern sowie den
Piezoelementen dreht sich somit durch die Mode hindurch. Dadurch wird das gemessene
Beschleunigungssignal mit der doppelten Drehfrequenz fdreh moduliert, da es sich ja um
eine Mode mit 2 Knotendurchmessern handelt und somit je Umdrehung 2 Schwingungen
durchlaufen werden. Dies führt dazu, dass man im Frequenzspektrum statt einer Resonanzfrequenz zwei Resonanzfrequenzen findet. Der Abstand dieser beiden Frequenzen
von der Resonanzfrequenz entspricht der Modulationsfrequenz fm . Dieser Effekt ist in
Bild 5.5 gut erkennbar und tritt natürlich nur beim rollenden Rad auf. Etwas oberhalb
der Radmode ist bei 1453 Hz eine Eigenfrequenz des Schienenrades zu erkennen, welches
nicht stark genug gedämpft war. In Tabelle 5.2 sind für 3 verschiedene Drehzahlen die
theoretischen und gemessenen Frequenzmodulationen aufgelistet.
Abbildung 5.5: P(2,0) Mode des Radsatzes rollend mit Schienenrad sowie ruhend mit und
ohne Schienenrad (mit Impulshammer angeregt)
Drehzahl [U/min]
87
114
155
fdreh [Hz]
1,45
1,9
2,6
fm [Hz] (theoretisch) fm [Hz] (gemessen)
2,9
2,9
3,8
3,9
5,2
5,5
Tabelle 5.2: Theoretische und gemessene Modulationsfrequenzen fm
37
Kapitel 6
Ergebnisse
6.1
Versuchsdurchführung und Ergebnisse bei frei
hängendem Radsatz
Aktive und passive Methoden wurden zuerst an einem frei hängenden Radsatz angewendet. Bei beiden Methoden wurde immer nur jeweils eine Mode gedämpft. Die Anregung
erfolgte an 2 verschiedenen Punkten, um eventuell einen Einfluss der Lage bzw. der
Ausrichtung der Piezo-Elemente erkennen zu können.
6.1.1
Passive Schwingungsminderung
Vorberechnung
Damit man die Dämpfung nach [2] berechnen kann, muss als erstes der allgemeine elektromechanische Kopplungskoeffizient Kij nach Gleichung 3.14 bestimmt werden. Ein
Einfluss eines Piezo-Elementes auf die Eigenfrequenzen des Radsatzmodell konnte bei
einer Messgenauigkeit des Messsystems von ∆f = 0,01 Hz nicht festgestellt werden. Somit ist der Kopplungskoeffizient für die erste Mode Kij < 0,007 und mit steigender
Frequenz kleiner werdend.
Für sehr kleine Kopplungskoeffizienten geht das optimale dimensionslose Frequenzverhältnis δopt (Gleichung 3.15) gegen 1. Das bedeutet, dass die elektrische Resonanzfrequenz genau auf die mechanische Resonanzfrequenz des Radsatzes abgestimmt werden
kann. Die Schwingungsdämpfung verringert sich mit kleiner werdendem Kopplungskoeffizienten. Aber auch bei sehr kleinen Kopplungskoeffizienten lässt sich bei sehr schwach
gedämpften Moden noch eine Schwingungsdämpfung erzielen. In Bild 6.1 ist die optimale Dämpfung für verschiedene Kopplungskoeffizienten und Dämpfungsparameter dargestellt. Bei einem Kopplungskoeffizienten Kij = 0,003 erreicht man noch eine Schwingungsdämpfung von 3 dB, wenn die strukturelle Dämpfung ζ = 0,002 beträgt. Allerdings
sieht man auch, dass bei einer strukturellen Dämpfung von ζ = 0,02 selbst bei einem
sehr hohen Kopplungskoeffizienten von Kij = 0,01 die Schwingungsdämpfung nur 1 dB
beträgt.
Problematisch ist, dass der optimale Widerstand RS,opt des Schwingkreises mit kleiner werdenden Kopplungskoeffizienten abnimmt, was gleich bedeutend damit ist, dass
38
KAPITEL 6. ERGEBNISSE
der Schwingkreis immer ungedämpfter werden muss. Für Kij = 0,007 z.B. ist ropt = 0,01.
Das würde einer Güte des Schwingkreises von Q = 100 entsprechen. Für den optimalen
Widerstand des Schwingkreises ergeben sich somit RS,opt = 50, 40, 26, 20, 19 und 13Ω für
die ersten 6 Moden. Schwingkreise mit solch hoher Güte sind allerdings unrealistisch.
Diese Werte konnten durch die verwendete Gyratorschaltung nicht realisiert werden. Die
höchste Güte die erreicht wurde lag bei Q = 27, was einem Wiederstand des Schwingkreises von RS = 149Ω entspricht.
Abbildung 6.1: Übertragungsfunktionen für verschiedene Kopplungskoeffizienten Kij mit
Dämpfung des Systems (a) ζ = 0,002 (b) ζ = 0,02
Versuchsdurchführung und Ergebnisse
An jedes Piezo-Element wurde eine Gyratorschaltung (Bild 4.3(c)) angeschlossen. Da
die Dämpfung des Schwingkreises durch die Gyratorschaltung schon über dem optimalen Wert lag, wurde ein zusätzlicher Widerstand im Schwingkreis nicht benötigt. Um die
Resonanz des Schwingkreises genau auf die jeweils zu dämpfende Mode abzustimmen,
wurde der Schwingkreis, bestehend aus aufgeklebtem Piezo-Element und Gyrator, mit
weißem Rauschen angeregt. Dazu wurde in den Schwingkreis eine Spannungsquelle in
V
, dabei sind Vpi die SpanReihe geschaltet. Gemessen wurde die Transferadmittanz Vpi
F
nung am Piezo-Element und VF die Spannung der Stromquelle. Als Richtwert für R2
des Gyrators diente Gleichung (4.3). Dieser Wert wurde dann solange verändert bis die
gewünschte Resonanzfrequenz eingestellt war. Dies war zum Teil sehr zeitaufwendig.
An der Transferadmittanz (Bild 6.7) kann man sehr gut erkennen, dass der Dämpfungseffekt in beide Richtungen funktioniert. Die elektrische Schwingung des Schwingkreises
39
KAPITEL 6. ERGEBNISSE
wird durch das mechanische System in dessen Resonanz gedämpft. Die anliegende Spannung führt zu Formänderungen des Piezo-Elementes, wodurch der Radsatz zum Schwingen angeregt wird. Dabei wird elektrische Energie in mechanische Energie umgewandelt
und es kommt zu einem Einbruch in der Transferadmittanz in der Resonanzfrequenz des
Radsatzes. Wie stark die Dämpfung ist, hängt wiederum vom unbekannten Kopplungskoeffizienten Kij ab. Wenn man die Tranzferadmittanzen in den jeweiligen Resonanzfrequenzen anschaut (Abbildungen 6.7, B.4, B.14, B.18, B.22, B.26), sieht man, dass nur
bei der 2. Mode eine nennenswerte Dämpfung der elektrischen Resonanz von ungefähr
3 dB auftritt. Bei den anderen Resonanzfrequenzen ist keine oder nur eine minimale
Dämpfung der elektrischen Resonanz durch den Radsatz erkennbar. Dieses Ergebnis
spiegelt sich dann auch in der Schwingungsdämpfung der Moden des Radsatzes durch
den Schwingkreis wieder. In der 2. Mode konnte eine maximale Schwingungsdämpfung
von 7 dB erreicht werden. Bei allen anderen Moden war die Dämpfung kleiner oder
gleich 1 dB. Die Ergebnisse für die 2. Mode bei 437 Hz sind in den Abbildungen 6.2 bis
6.7 dargestellt. Obwohl die elektrische Dämpfung des Schwingkreises bei 437 Hz nicht
optimal war, konnte mit beiden Piezoelementen eine Schwingungsdämpfung von 6 bis 7
dB in allen Messpunkten erreicht werden.
Da in allen Messpunkten eine Pegelabnahme festgestellt werden konnte, auch in den
beiden Mikrofonpositionen (Abb. 6.5 - 6.6), ist davon auszugehen, dass die Dämpfung
nicht nur in diesen einzelnen Punkten, durch Verschiebung der Schwingungsenergie, erfolgte, sondern die Schwingung des Rades an sich reduziert wurde.
Es wurde jeweils die Dämpfung je eines Piezo-Elementes sowie beider Piezo-Elemente
zusammen gemessen. Durch ein Piezoelement wird im Mittel eine Dämpfung der Mode
von 4 dB erreicht. Mit dem Piezo-Element 1 werden etwas bessere Ergebnisse erreicht,
da es für diese Mode wahrscheinlich optimaler ausgerichtet ist. Die beiden Anregeposition hatten keinen Einfluss auf die Schwingungsdämpfung, da für die 2. Mode die Lage
der Piezo-Elemente hinsichtlich der Modenform bei beiden Anregepositionen nur geringfügig verschoben ist, wie man Bild 5.3 entnehmen kann.
40
KAPITEL 6. ERGEBNISSE
Abbildung 6.2: Transferadmittanz Messpunkt 1 (axial)
Abbildung 6.3: Transferadmittanz Messpunkt 2 (axial)
41
KAPITEL 6. ERGEBNISSE
Abbildung 6.4: Transferadmittanz Messpunkt 3 (radial)
Abbildung 6.5: Transferadmittanz Mikrophon 1 (axial)
42
KAPITEL 6. ERGEBNISSE
Abbildung 6.6: Transferadmittanz Mikrophon 2 (radial)
Abbildung 6.7: Dämpfung des Schwingkreises durch Kopplung mit dem Radsatz
Obwohl die erste und die zweite Mode des Radsatzes sich nur in der Symmetrie
bezüglich des Achsschwerpunktes unterscheiden, konnte bei der 1. Mode keine Dämpfung
erreicht werden. Dies liegt daran, dass die 1. Mode viel stärker gedämpft ist als die 2.
43
KAPITEL 6. ERGEBNISSE
Mode. Die mechanische Dämpfung der 1. Mode beträgt ζ = 0, 01 und für die 2. Mode
ζ = 0, 002. Wenn man von einem gleichbleibenden elektromechanischen Kopplungsfaktor
für beide Moden ausgeht, lässt sich in der Theorie die 1. Mode nur um 0,7 dB dämpfen.
Da aber der optimale Widerstand des Schwingkreises in der Praxis nicht erreicht werden
konnte, ist es somit nicht verwunderlich, dass bei der 1. Mode keine Dämpfung erzielt
wurde.
Die 3. bis 6. Mode konnten nicht oder nur sehr schwach gedämpft werden. Es ist davon
auszugehen, dass der elektromechanische Kopplungskoeffizient sehr klein ist, da wie in
Abschnitt 6.1.1 schon beschrieben, kein Einfluss des beschalteten Piezo-Elementes auf
die Eigenfrequenzen des Rades messbar waren. Da die strukturelle Dämpfung der 3. bis
6. Mode zwischen ζ = 0,002 und ζ = 0,005 beträgt, könnte man bei hoher Güte des
Schwingkreises eine wenn auch geringe Schwingungsdämpfung erwarten. Hier konnten
beim Schwingkreis aber keine so hohen Güten erzielt werden. Bei 437 Hz wurde noch eine
Güte von Q = 27 erreicht. Bei den höheren Moden lag die Güte im Schnitt zwischen
5 und 7 und konnte auch durch Variationen der Widerstände und der Kapazität der
Gyratorschaltung nicht verbessert werden. Bei der 3. Mode und bei der 5. Mode wurde
trotzdem mit beiden Piezo-Elementen eine Dämpfung von fast 1 dB erreicht. Bei einem
stärker entdämpften Schwingkreis ließen sich hier sicherlich ähnlich gute Ergebnisse wie
bei der 2. Mode erzielen und auch bei der 2. Mode könnte mit optimaler Güte des
Schwingkreises die Dämpfung noch verbessert werden. Hier ließen sich theoretisch 11
dB erreichen mit einem optimalen Widerstand des Schwingkreises von RS,opt = 50Ω.
Bei den anderen Moden lassen sich keine theoretischen Dämpfungwerte angeben, da
der elektromechanische Kopplungskoeffizient für diese Moden nicht bestimmt werden
konnte.
In Tabelle 6.1 sind die Messergebnisse für die ersten 6 Moden des Radsatzes dargestellt.
∆ ν/VF gibt die maximal erreicht Pegelabnahme der Transferadmittanz an. In Anhang
B sind der Vollständigkeit halber die Messergebnisse der passiven Schwingungsdämpfung
in allen Messpunkten für alle betrachteten Moden dargestellt.
Nr.
Mode
1 P (1, 0)A
2 P (1, 0)S
3
P (0, 0)
4 P (0, 1)A
5 P (0, 1)S
6
P (2, 0)
f [Hz]
347
437
653
860
904
1304
ζ
Q ∆ ν/VF [dB]
0,01 26
0
0,002 27
7
0,002 9
1
0,005 5
0
0,005 5
1
0,003 3
0
Tabelle 6.1: Überblick über die Messergebnisse der passiven Schwingungsminderung der ersten 6 Moden des Radsatzes, ∆ ν/VF ist die maximal erreichte Schwingungsminderung, ζ die
strukturelle Dämpfung, Q die erreichte Güte des Schwingkreises
Weiterhin wurde der Einfluss untersucht, den ein nicht optimal abgestimmter Schwingkreis hat. Dazu wurde die Induktivität der Gyratorschaltung schrittweise verändert und
die Dämpfung gemessen. Um die Ergebnisse mit der Theorie vergleichen zu können,
muss der Kopplungskoeffizient Kij bestimmt werden. Aus der gemessenen Dämpfung
44
KAPITEL 6. ERGEBNISSE
des Schwingkreises lässt sich der Widerstand RS der Schaltung bestimmen. Wenn man
nun annimmt, dass für den gemessenen maximalen Dämpfungswert von 6 dB die elektrisch Resonanzfrequenz optimal auf die Mode abgestimmt ist (δopt = 1), erhält man
Kij = 0,009. Mit diesem Wert lassen sich die Übertragungsfunktionen für nicht optimal
eingestellte Schwingkreise berechnen. Die Ergebnisse sind in Abbildung 6.8 dargestellt.
Die theoretischen und gemessenen Werte stimmen sehr gut überein. Bei einer Abweichung der elektrischen Resonanzfrequenz von 6% vom Optimum, beträgt die Dämpfung
nur noch 1 dB. Je ungedämpfter der Schwingkreis ist, um so stärker wirken sich Frequenzverschiebungen auf die Dämpfung aus. Dabei ist es egal ob sich die elektrische Resonanz ändert oder sich die Resonanz des mechanischen Systems ändert. In dem hier vorliegenden Fall ist es eher unwahrscheinlich, dass sich die Eigenfrequenzen des Radsatzes
verschieben. Geringe Änderungen der Kapazität oder der Widerstände des Netzwerkes
können jedoch eine beachtliche Verschiebung der Resonanzfrequenz des Schwingkreises
verursachen.
Abbildung 6.8: Transferfunktionen bei verschiedenen Resonanzfrequenzen des Schwingkreises (a) theoretisch (b) Messpunkt 1 (axial)
6.1.2
Aktive Schwingungsminderung
Bei der aktiven Schwingungsminderung wurde das Piezo-Element 1 als Sensor benutzt.
Ziel war es das Spannungssignal VS des Sensors zu minimieren, welches proportional zur
Auslenkung an diesem Ort ist. Dazu wurde das Signal gefiltert, phasenverschoben und
verstärkt. Dies wurde von Hand so eingestellt, dass das mit einem Oszilloskop sichtbar
gemachte Sensorsignal minimiert wurde. Das so modifizierte Spannungssignal VA lag am
Piezo-Element 2 an, welcher als Sekundärschwingerreger diente.
45
KAPITEL 6. ERGEBNISSE
Bei allen betrachteten Moden zeigte sich eine hohe Unempfindlichkeit gegenüber der
Phasenverschiebung. An einzelnen Punkten kam es wie zu erwarten zur positiven Rückkopplung und eine daraus folgende Instabilität des Systems. Aber außerhalb dieser kritischen Phasenverschiebung konnte so gut wie kein Einfluss beobachtet werden. Den
größten Einfluss hatten die Verstärkung und die Filtereinstellungen. Als Anfangseinstellung des Schmalbandfilters wurde immer die jeweilige Resonanzfrequenz der Mode
als Mittenfrequenz gewählt. Die Bandbreite wurde sehr schmal gewählt, so dass wenn
möglich alle anderen Eigenfrequenzen außerhalb des Durchlassbereiches des Filters lagen. Diese Einstellung musste in fast allen Fällen noch nachgeregelt werden, um die
Stabilität des Feedback-Systems zu sichern.
Die erzielten Schwingungsdämpfungen in allen Messpunkten und für alle Moden sind in
Tabelle 6.2 zusammengefasst und in Anhang C detailiert dargestellt.
Am besten ließ sich die 3. Mode bei 653 Hz dämpfen. An allen Messpunkten konnte eine
Dämpfung von 13 bis 14 dB bei Anregung am Punkt 1 und 19 bis 20 dB bei Anregung
am Punkt 2 erzielt werden (Abb.6.11). Es ist also davon auszugehen, dass die Schwingungsminderung nicht nur lokal um den Sensorpunkt erfolgte, sondern das Rad an sich
gedämpft wurde.
Bei den restlichen Moden ließ sich auch eine Verringerung des Sensorsignals und des
nahe gelegenen Messpunktes 1 (Abb. 6.9-6.14) erzielen. Jedoch kommt es bei der 1. und
2. Mode am Messpunkt 2, welcher in der Nähe von der Sekundärquelle liegt, zu einem
Anstieg von 0-3 dB bei Anregung am Punkt 1 bzw. 3-9 dB bei Anregung am Punkt
2. Der starke Anstieg bei Anregung am Punkt 2, ist aber höchst wahrscheinlich darauf
zurückzuführen, dass sich die Schwingungsform des Rades durch die Sekundärquelle etwas verändert und der Messpunkt 2 nicht mehr in der Knotenlinie der Schwingungsform
liegt. An allen anderen Messpunkten kommt es zu einer zwischen den Messpunkten nur
schwach schwankenden Schwingungsminderung von 4 dB bei 347 Hz und 12 dB bei 437
Hz. Es liegt deshalb auch bei diesen 2 Moden höchst wahrscheinlich eine globale Schwingungsminderung vor.
Die 4. Mode bei 860 Hz und die 5. Mode bei 904 Hz liegen dicht beieinander, so dass
man weder die eine noch die andere dämpfen kann ohne die andere mit zu beeinflussen. Problematisch ist dabei, dass die Modenformen zwar fast identisch aber zueinander phasenverschoben sind. Das bedeutet, dass das Sekundärsignal bei einer Mode zur
Schwingungsminderung und bei der jeweils anderen zur Verstärkung führt. Während
bei 853 Hz bei Anregung am Punkt 1 keine befriedigende Einstellung gefunden werden
konnte, ohne dass die Mode bei 904 Hz instabil wurde, konnte bei Anregung am Punkt
2 eine mittlere Minderung von 4 dB erreicht werden, ohne das es zu einer Verstärkung
der 904 Hz Mode kam. Wenn das Sekundärsignal weiter verstärkt wurde, konnte die 853
Hz Mode zwar bis 8 dB gedämpft werden, ohne dass das System instabil wurde, aber
nur bei gleichzeitiger Pegelzunahme der 904 Hz Mode um 14 dB (Bild 6.13).
Bei aktiven Minderung der 904-Hz-Mode konnte bei beiden Anregepunkten eine Schwingungsminderung von 3-5 dB erzielt werden, dabei stieg der Pegel der 853-Hz-Mode in
einigen Punkten um 1-2 dB.
Der Messpunkt 1 bei Anregung in Punkt 2 und der Messpunkt 2 bei Anregung in Punkt
1 liegen bei der 1304-Hz-Mode in oder dicht bei der Knotenlinie der Schwingungsform,
wie man gut Abbildung 5.3 entnehmen kann. Somit kommt es in diesen Messpunkten
zu nicht repräsentativen Abweichungen von den anderen Messpunkten (Abb. 6.14). Es
46
KAPITEL 6. ERGEBNISSE
kommt aber zu keinem Anstieg in der Transferadmittanz wie bei den entsprechenden
Messpunkten bei 347 Hz und 437 Hz. Bei den übrigen Messpunkten kann eine Pegelabnahme von 5-10 dB bei Anregung Punkt 1 und von 3-5 dB bei Anregung Punkt 2
gemessen werden.
f [Hz] Anregepunkt
347 Hz
A1
347 Hz
A2
437 Hz
A1
437 Hz
A2
653 Hz
A1
653 Hz
A2
860 Hz
A1
860 Hz
A2
904 Hz
A1
904 Hz
A2
1304 Hz
A1
1304 Hz
A2
Messpunkte
M1
M2
M3
M4
M5
4,5 dB 0 dB
5 dB 1,5 dB
4 dB
4,5 dB -3 dB
5 dB
5 dB
4 dB
7 dB -3 dB 21 dB 1,5 dB 19 dB
12 dB -9 dB 14 dB 11 dB 14 dB
13 dB 12 dB 13 dB 14 dB 14 dB
20 dB 19 dB 19 dB 19 dB 19 dB
1 dB 1 dB
0 dB 0,5 dB
1 dB
4 dB 5 dB
4 dB
3 dB 1,5 dB
5 dB 5 dB 2,5 dB 3,5 dB
4 dB
5 dB 5 dB
4 dB
3 dB
4 dB
5 dB 2 dB 7,5 dB 10 dB
7 dB
0 dB 3 dB 4,5 dB
3 dB
5 dB
Tabelle 6.2: Überblick über die Messergebnisse der aktiven Schwingungsminderung der ersten
6 Moden des Radsatzes für die Messpunkte M1 bis M5
Abbildung 6.9: 347-Hz-Mode, Transferadmittanz am Messpunkt 1 mit und ohne Feedbackregelung (axial)
47
KAPITEL 6. ERGEBNISSE
Abbildung 6.10: 437-Hz-Mode, Transferadmittanz Messpunkt 1 mit und ohne Feedbackregelung
Abbildung 6.11: 653-Hz-Mode, Transferadmittanz Messpunkt 1 mit und ohne Feedbackregelung
48
KAPITEL 6. ERGEBNISSE
Abbildung 6.12: 860-Hz-Mode, Transferadmittanz Messpunkt 1 mit und ohne Feedbackregelung
Abbildung 6.13: 904-Hz-Mode,Transferadmittanz Messpunkt 1 mit und ohne Feedbackregelung
49
KAPITEL 6. ERGEBNISSE
Abbildung 6.14: 1304-Hz-Mode, Transferadmittanz Messpunkt 1 mit und ohne Feedbackregelung
6.2
Versuchsdurchführung und Ergebnisse bei rollendem Radsatz
Prinzipiell unterscheidet sich die Versuchsdurchführung nicht vom vorhergehenden Versuch. Da weder mit der passiven noch mit der aktiven Dämpfungstechnik im Frequenzbereich unterhalb 1400 Hz ein Ergebnis erzielt werden konnte, werden im folgenden nur
die Ergebnisse der Dämpfung der P(2,0) Mode bei 1428 Hz dargestellt.
6.2.1
Passive Schwingungsminderung
Im Vergleich zum freihängenden ruhenden Radsatz konnte insgesamt eine weit höhere
Dämpfung erreicht werden. Wie schon in Kapitel 5.2 beschrieben, handelt es sich bei
der P(2,0) Mode um eine Mode, die sich aufgrund der ortsfesten Anregung nicht mit
dem Rad mitdreht. Durch die Drehung der Piezoelemente durch die Modenform erfahren diese eine insgesamt viel stärkere Auslenkung. Somit wird die elektromechanische
Kopplung wesentlich verbessert. Weiterhin konnte ein großer Unterschied in der Wirksamkeit der unterschiedlich ausgerichteten Piezoelemente festgestellt werden. Mit dem
Piezoelement 1 konnte nur eine Dämpfung von 3 dB erreicht werden. Wogegen mit
dem Piezoelement 2 eine Dämpfung von 7 dB erreicht werden konnte. Bei Benutzung
beider Piezoelemente gleichzeitig, ist die Schwingungsdämpfung nur geringfügig besser
als mit dem Piezoelement 2 allein (Abb. D.2). Die Ausrichtung der Piezoelemente hat
bei dieser Modenform einen starken Einfluss auf die elektromechanische Kopplung. Das
50
KAPITEL 6. ERGEBNISSE
Piezoelement 2 wird in seine Wirkrichtung viel stärker verformt als dass Piezoelement
1.
Abbildung 6.15: Schnellespektrum mit und ohne passiver Dämpfung, Messpunkt 2
6.2.2
Aktive Schwingungsminderung
Im Mittel konnte die 1428 Hz Mode an allen Messpunkten um 20 dB reduziert werden. Als Aktor kam sowohl das Piezoelement 1 als auch Piezoelement 2 zum Einsatz.
Die Ergebnisse unterscheiden sich etwas aber nicht wesentlich. Ob der Unterschied in
der unterschiedlichen Ausrichtung der Piezoelemente begründet liegt oder in nicht ganz
optimalen Einstellungen der Regelstrecke des Feedbacksystems wurde nicht weiter untersucht. Eine Abhängigkeit der Dämpfung von der Drehzahl konnte nicht festgestellt
werden. Die Messergebnisse für unterschiedliche Drehzahlen sind in Anhang E.2 dargestellt. Bei diesem Versuch wurde die Dämpfung für die Drehzahl von 114 U/min
optimiert. Ohne Änderungen an den Einstellungen der Feedbackregelung vorzunehmen,
wurde dann die Drehzahl auf 155 U/min erhöht bzw. auf 87 U/min verringert und jeweils
die Dämpfung gemessen. Man sieht recht deutlich, dass auch ohne drehzahlabhängige
Regelung in diesem Drehzahlbereich sehr gute Ergebnisse erzielt werden können.
Die Übertragungsfunktion der Sekundärstrecke lässt sich im drehenden Zustand nicht
messen, da das Ergebniss durch die Anregung des Schienenrades und Störgeräusche
des Motors usw. verfälscht wird. Deshalb konnte die Übertragungsfunktion der Sekundärstrecke nur bei ruhendem Rad gemessen werden. In Abbildung 6.17 ist der Betrag
und die Phase der Übertragungsfunktion H des offenen Kreises eines stabilen und eines instabilen Feedback-Systems dargestellt. Dazu wurde die Kreisübertragungsfunktion
zwischen dem Ladungsverstärker des Beschleunigungsaufnehmers und dem Phasenschie51
KAPITEL 6. ERGEBNISSE
ber getrennt. Statt dem Sensorsignal erhielt der Phasenschieber ein Rauschsignal VF r .
Die Übertragungsfunktion H ist das nun gemessene Beschleunigungssignal Va in Bezug
zum Rauschsignal VF r .
Va
H=
(6.1)
VF r
Im instabilen Fall ist die Phase bei 1428Hz gleich null und der Betrag gleichzeitig
größer als 0 dB, was bekanntlich zur Instabilität führt (In Abbildung 6.17 mit rotem
Kreis markiert.). Die Filtereinstellung des Bandpasses in diesem Fall betrug 1250 Hz 1900 Hz. Im stabilen Fall war der Bandpassfilter auf 950 Hz-1400 Hz eingestellt. Wichtig
dabei ist, dass die Resonanzfrequenz von 1428 Hz schon außerhalb des Durchlassbereiches liegt und somit gedämpft wird. Wie allerdings die Übertragungsfunktionen bei
drehendem Rad aussehen, ist unbekannt. Es ist aber davon auszugehen, dass durch
die veränderten Randbedingungen sich auch die Übertragungsfunktionen ändern. Der
Kontaktpunkt von Eisenbahnrad und Schienenrad und auch die Modenform ist vom
Feedbacksensor aus gesehen nicht mehr stationär. Es konnte in einzelnen Fällen sogar
festgestellt werden, dass ein stabiles Feedbacksystem instabil wurde sobald man den
Radprüfstand anhielt.
52
KAPITEL 6. ERGEBNISSE
Abbildung 6.16: Schnellespektrum des Sensorsignals mit und ohne aktiver Dämpfung
Abbildung 6.17: stabile / instabile Übertragungsfunktion der Sekundärstrecke bei ruhendem
Rad gemessen, roter Kreis markiert Instabilität
53
Kapitel 7
Zusammenfassung und Ausblick
Es wurde die Dämpfung eines Eisenbahn-Radsatz-Modelles durch passive und aktive
Maßnahmen mit Hilfe von Piezoelementen untersucht. Bei der aktiven Dämpfung wurde ein Feedbacksystem benutzt. Als Aktoren dienten dabei 2 piezoelektrische Platten,
welche auf die Radscheibe aufgeklebt wurden. Die gleichen piezoelektrischen Platten
wurden bei der passiven Dämpfung dazu benutzt durch ein passives elektrisches Netzwerk, welches mit den Piezoelementen verbunden wurde, dem Rad in einzelnen Moden
Schwingungsenergie zu entziehen.
Mit dem Verfahren der aktiven Schwingungsminderung konnten zum Teil sehr gute
Ergebnisse erzielt werden. Die P(2,0) Mode bei 1428Hz konnte beim rollenden Rad im
Mittel an allen Messpunkten um 20 dB reduziert werden.
Erwartungsgemäß konnten mit der passiven Dämpfung nicht ganz so gute Werte erreicht werden. Es zeigte sich, dass für schwach gedämpfte Moden, bei ausreichender elektromechanischer Kopplung, Dämpfungen von bis zu 8 dB möglich sind. Da die Dämpfung
des Schwingkreises nicht optimal einzustellen war, ist eventuell bei entsprechender Optimierung eine Steigerung der Dämpfung möglich. Moden, wie z.B. die P(2,0) Mode, die
sich nicht mit dem Rad mitdrehen, scheinen optimal für die passive Dämpfung zu sein. In
diesen Fällen erfährt das Piezoelement beim Durchwandern der Mode die größtmögliche
Auslenkung. Es ist aber auf die Ausrichtung des Piezoelementes zu achten, da sich hier
große Unterschiede zeigen. Für P(m,0) Moden mit m=2,3,4... Knotendurchmesser sollte
die Wirkrichtung des Piezoelementes in der Scheibenebene senkrecht zum Radius liegen. Eine Aussage über die optimale Formgebung der Piezoelemente kann nicht getroffen
werden, da nur Piezoelemente der gleichen Form und Größe verwendet wurden.
Die passive piezoelektrische Dämpfung ist der aktiven Dämpfung zwar in der Wirksamkeit unterlegen, aber der technische Aufwand ist geringer. Es werden nur wenige
elektrische Bauelemente benötigt. Die verwendeten Operationsverstärker benötigen allerdings eine Stromversorgung, welche aber auch mit Batterien realisiert werden kann.
Da besonders schwach gedämpfte Moden für die passive Dämpfung in Betracht kommen,
wäre eine Anwendung in der Unterdrückung von Kurvenquietschen oder Bremsenquietschen denkbar. Heckl und Huang [25] stabilisierten Radmoden die für Kurvenquietschen
verantwortlich sind mit Hilfe eines Feedbacksystems. Ein passives System würde einen
wesentlich geringeren Aufwand bedeuten. Mit zunehmender Selbstanregung und Instabilität einer Mode dürfte auch die elektromechanische Kopplung zunehmen. Das würde
bedeuten, dass die Mode um so stärker gedämpft wird je instabiler sie wird.
54
KAPITEL 7. ZUSAMMENFASSUNG UND AUSBLICK
Zur Minimierung der Schallabstrahlung von Rollgeräuschen scheint die aktive Dämpfung
geeigneter. Hier sind viel größere Pegelminderungen möglich. Welche Modenformen sich
am besten dämpfen lassen, konnte aus den vorliegenden Ergebnissen nicht abgelesen
werden. Die Drehung des Feedbacksensors und -aktors mit der Radscheibe durch die
Mode hat auch bei der aktiven Dämpfung einen positiven Einfluss. Bei der P(2,0) Mode konnte am ruhenden Radsatz nur eine mittlere Dämpfung von 7 dB erzielt werden.
Beim drehenden Rad verbesserte sich die Dämpfung auf 20 dB. Da sich Sensor und
Aktor durch die Mode drehen, ist es sehr wahrscheinlich, dass dabei immer optimale
Orte durchlaufen werden, an denen die Dämpfung dann maximal wird.
In der Praxis ist die Einstellung der Regelstrecke von Hand sicher unpraktikabel. Der
Entwurf einer effizienten automatischen zeitinvarianten Regelung für ein zeitvariantes
von der drehzahlabhängiges System dürfte ein spannendes Unterfangen sein.
In wie weit die hier erhaltenen Erkenntnisse auch auf Moden, die für die Schallabstrahlung besonders verantwortlich sind, übertragbar sind, müssen zukünftige Untersuchungen zeigen.
55
Literaturverzeichnis
[1] E. Bianchini, R. Spangler, and C. Andrus, The use of piezoelectric devices to control snowboard vibrations, In Proc. SPIE Smart Structures and Materials: Smart
Structures and integrated systems, SPIE Vol. 3329, pages 106−114, 1998
[2] Hagood NW, von Flotow AH., Damping of structural vibrations with piezoelectric
materials and passive electrical networks. Journal of Sound and Vibration 1991;
146(2):243-368
[3] Hollkamp JJ, Multimodal passive vibration suppression with piezoelectric materials
and resonant shunts, Journal of Intelligent Material Systems and Structures 1994;
5:49-57
[4] S. Behrens and S. O. R. Moheimani, Current flowing multiple mode piezoelectric shunt dampener. In Proc. SPIE Smart Materials and Structures, Paper No.
4697−24, 217−226, San Diego, CA, March 2002
[5] S. Behrens, S. O. R. Moheimani, and A. J. Fleming. Multiple mode current
flowing passive piezoelectric shunt controller. Journal of Sound and Vibration,
266(5):929−942, 2003
[6] A. J. Fleming and S. O. R Moheimani, Reducing the inductance requirements of piezoelectric shunt damping circuits. IOP Smart Materials and Structures, 12:57−64,
January 2003
[7] Fleming AJ, Behrens S, Moheimani SOR, Synthetic impedance for implementation
of piezoelectric shuntdamping circuits, Electronic Letters 2000; 36:1525-1526
[8] Fleming, A.J.; Moheimani, S.O.R.; Control orientated synthesis of highperformance piezoelectric shunt impedances for structural vibration control, IEEE
Transactions on Control Systems Technology, Volume 13, Issue 1, Jan. 2005, 98 112
[9] Moheimani, S.O.R.; Fleming, A.J.; Behrens, S.; Dynamics, stability, and control
of multivariable piezoelectric shunts, IEEE/ASME Transactions on Mechatronics,
Volume 9, Issue 1, März 2004, 87 - 99
[10] Moheimani, S.O.R.; A survey of recent innovations in vibration damping and control
using shunted piezoelectric transducers , IEEE Transactions on Control Systems
Technology, Volume 11, Issue 4, July 2003, 482 - 494
56
LITERATURVERZEICHNIS
[11] S. Behrens, A. J. Fleming, and S. O. R.Moheimani. A broadband controller for piezoelectric shunt damping of structural vibration. IOP Smart Materials and Structures, 12:18 - 28, January 2003.
[12] Gregory S. Agnes, ”Development of a Modal Model for Simultaneous Active and
Passive Piezoelectric Vibration Suppression”, Journal of Intelligent Material Systems and Structures, 6 Jul 1995, 482-487
[13] Adachi, Awakura und Iwatsubo, Hybrid Piezoelectric Damping for Structural Vibration Suppression, Journal of Intelligent Material Systems and Structures, Vol.15,
Nov 2004, 795-801
[14] R. A. Morgan and K. W. Wang, An Active-Passive Piezoelectric Absorber for Structural Vibration Control Under Harmonic Excitations With Time-Varying Frequency, Part 1: Algorithm Development and Analysis; Journal of Vibration and Acoustics, January 2002 Volume 124, Issue 1, pp. 77-83
[15] R. A. Morgan and K. W. Wang, An Active-Passive Piezoelectric Absorber for Structural Vibration Control Under Harmonic Excitations With Time-Varying Frequency, Part 2: Experimental Validation and Parametric Study; Journal of Vibration
and Acoustics, January 2002 Volume 124, Issue 1, pp. 84-89
[16] M. Ahmadian; K. M. Jeric, On the application of shunted piezoceramics for increasing acoustic transmission loss in structures, Journal of Sound and Vibration, 2001,
Volume 243(2),347-359
[17] J. L. van Niekerk, B. H. Tongue, A. K. Packard, Active control of a circular Plate
to reduce transient noise transmission, Journal of Sound and Vibration, 1995, Vol.
183(4),643-662
[18] Garnett E. Simmers,Jr. ;Jeffrey R. Hodgkins ;David D. Mascarenas Improved Piezoelectric Self-sensing Actuation; Journal of Intelligent Material Systems and Structures, Vol. 15, No. 12, 941-953 (2004)
[19] Wenfeng Zhang, Jinhao Qiu, Junji Tani ;Robust Vibration Control of a Plate Using
Self-sensing Actuators of Piezoelectric Patches; Journal of Intelligent Material Systems and Structures, Vol. 15, No. 12, 923-931 (2004)
[20] W. H. Liao, W. W. Law, K. W. Chan; Implementation of Adaptive Structures with
Enhanced Self-Sensing Piezoelectric Actuators, IEEE ICIT‘02 Bangkok, 2002, S.
955-960
[21] S. Behrens, Passive and Semi-Active Vibration Control of Piezoelectric Laminates,
Masters Thesis, Dep. Elect. Comput. Eng., Univ.Newcastle, 2000
[22] Timoshenko, Young und Weaver, Vibration Problems in Engineering, 1974, New
York (4. Auflage)
[23] H. Ahlers, Passive Dämpfung reibungsinduzierter Bremsgeräusche mit Piezoelementen, Fortschr.-Ber. VDI Reihe 1 Nr. 354, 2002
57
LITERATURVERZEICHNIS
[24] Maria A. Heckl, I. D. Abrahams, Active control of friction-driven Oscillations, Journal of Sound and Vibration, 1996, Vol. 193(1),417-426
[25] Maria A. Heckl, X. Y. Huang, Curve Squeal of Train Wheels, Part 3: Active Control,
Journal of Sound and Vibration, 2000, Vol. 229(3),709-735
[26] Hagedorn, P. and von Wagner, U.; SSmart pads”: A new tool for the suppression of
brake squeal? , VDI-Bericht, proceedings of XXIV. m-Kolloquium, 2004, Vol. 575,
S.153-172
[27] S. Y. Wu, Method for multiple mode shunt damping of structural vibration using
a single PZT transducer. In Proc. SPIE Smart Structures and Materials, Smart
Structures and Intelligent Systems, SPIE Vol. 3327, pages 159−168, Huntington
Beach, CA, March 1998
[28] S. Y. Wu, Multiple PZT transducers implemented with multiple-mode piezoelectric
shunting for passive vibration damping. In Proc. SPIE Smart Structures and Materials, Passive Damping and Isolation, SPIE Vol. 3672, pages 112−122, Huntington
Beach, CA, March 1999
[29] S. Y. Wu. Broadband piezoelectric shunts for structural vibration control. Patent
No. 6,075,309, June 2000
[30] S. Behrens, S. O. R. Moheimani, and A. J. Fleming. Multiple mode passive piezoelectric shunt dampener. In Proc. IFAC Mechatronics 2002, Berkerley, CA, December 2002
[31] M. Heckl, P. Heiß, Akustische Optimierung von Radkenndaten für Schienenfahrzeuge, BMFT TV 8416/9, Institut für Technische Akustik, TU Berlin, 1987
[32] M. Heckl, J. Feldmann, Körperschallentstehung beim Rad/Schiene-System und
Ausarbeitung von Vorschlägen zur Geräuchminderung, BMFT TV 8021/3, Abschlußbericht Teil II, Institut für Technische Akustik, TU Berlin, 1984
[33] Lynch, T.H., ”The Right Gyrator Trims the Fat Off Active Filters”, Electronics,
21 Jul 1977, 115-119
[34] Designing
with
the
LMC835
Digital-Controlled
Graphic
Equalizer, National Semiconductor Application, Note 435, March 1986
(http://www.national.com/an/AN/AN-435.pdf)
58
Anhang A
Größenverzeichnis
C
f
F
kij
K
Kij
L
M
r
R
s
Y
Z
δ
γ
ζ
λ
υ(x)
ω
ν(s)
Kapazität
Frequenz
Kraft
elektromechanischer Kopplungskoeffizient
modale Steife
allgemeiner elektromechanischer Kopplungskoeffizient
Induktivität
modale Masse
Dämpfungsparameter
ohmscher Widerstand
komplexe Frequenz
Transfer-Admittanz
Impedanz
dimensionsloses Frequenzverhältnis
dimensionslose komplexe Frequenz
mechanischer Dämpfungsparameter
Wellenlänge
Schnelle
Kreisfrequenz
modale Geschwindigkeit
Indizes
el
i
j
opt
res
D
E
S
T
elektrisch
Richtung der Erregung des Piezos
Richtung der Reaktion des Piezos
optimal
Resonanz
steht für konstante dielektrische Verschiebung
steht für konstantes Feld
steht für konstante Dehnung
steht für konstanten Druck
59
Anhang B
Messergebnisse der passiven
Dämpfung bei ruhendem Rad
B.1
347Hz
Abbildung B.1: Transferadmittanz Messpunkt 1 (axial)
60
ANHANG B. MESSERGEBNISSE DER PASSIVEN DÄMPFUNG BEI
RUHENDEM RAD
Abbildung B.2: Transferadmittanz Messpunkt 2 (axial)
Abbildung B.3: Transferadmittanz Messpunkt 3 (radial)
61
ANHANG B. MESSERGEBNISSE DER PASSIVEN DÄMPFUNG BEI
RUHENDEM RAD
Abbildung B.4: Transferadmittanz
B.2
437Hz
Abbildung B.5: Transferadmittanz Messpunkt 1 (axial)
62
ANHANG B. MESSERGEBNISSE DER PASSIVEN DÄMPFUNG BEI
RUHENDEM RAD
Abbildung B.6: Transferadmittanz Messpunkt 2 (axial)
Abbildung B.7: Transferadmittanz Messpunkt 3 (radial)
63
ANHANG B. MESSERGEBNISSE DER PASSIVEN DÄMPFUNG BEI
RUHENDEM RAD
Abbildung B.8: Transferadmittanz Mikrophon 1 (axial)
Abbildung B.9: Transferadmittanz Mikrophon 2 (radial)
64
ANHANG B. MESSERGEBNISSE DER PASSIVEN DÄMPFUNG BEI
RUHENDEM RAD
Abbildung B.10: Transferadmittanz
B.3
653Hz
Abbildung B.11: Transferadmittanz Messpunkt 1 (axial)
65
ANHANG B. MESSERGEBNISSE DER PASSIVEN DÄMPFUNG BEI
RUHENDEM RAD
Abbildung B.12: Transferadmittanz Messpunkt 2 (axial)
Abbildung B.13: Transferadmittanz Messpunkt 3 (radial)
66
ANHANG B. MESSERGEBNISSE DER PASSIVEN DÄMPFUNG BEI
RUHENDEM RAD
Abbildung B.14: Transferadmittanz
B.4
860Hz
Abbildung B.15: Transferadmittanz Messpunkt 1 (axial)
67
ANHANG B. MESSERGEBNISSE DER PASSIVEN DÄMPFUNG BEI
RUHENDEM RAD
Abbildung B.16: Transferadmittanz Messpunkt 2 (axial)
Abbildung B.17: Transferadmittanz Messpunkt 3 (radial)
68
ANHANG B. MESSERGEBNISSE DER PASSIVEN DÄMPFUNG BEI
RUHENDEM RAD
Abbildung B.18: Transferadmittanz
B.5
904Hz
Abbildung B.19: Transferadmittanz Messpunkt 1 (axial)
69
ANHANG B. MESSERGEBNISSE DER PASSIVEN DÄMPFUNG BEI
RUHENDEM RAD
Abbildung B.20: Transferadmittanz Messpunkt 2 (axial)
Abbildung B.21: Transferadmittanz Messpunkt 3 (radial)
70
ANHANG B. MESSERGEBNISSE DER PASSIVEN DÄMPFUNG BEI
RUHENDEM RAD
Abbildung B.22: Transferadmittanz
B.6
1304Hz
Abbildung B.23: Transferadmittanz Messpunkt 1 (axial)
71
ANHANG B. MESSERGEBNISSE DER PASSIVEN DÄMPFUNG BEI
RUHENDEM RAD
Abbildung B.24: Transferadmittanz Messpunkt 2 (axial)
Abbildung B.25: Transferadmittanz Messpunkt 3 (radial)
72
ANHANG B. MESSERGEBNISSE DER PASSIVEN DÄMPFUNG BEI
RUHENDEM RAD
Abbildung B.26: Transferadmittanz
B.7
Einfluss der Abweichung der elektrischen Resonanzfrequenz
Abbildung B.27: Transferfunktionen bei verschiedenen Resonanzfrequenzen des Schwingkreises (a) theoretisch (b) Messpunkt 1 (axial)
73
ANHANG B. MESSERGEBNISSE DER PASSIVEN DÄMPFUNG BEI
RUHENDEM RAD
Abbildung B.28: Transferadmittanzen bei verschiedenen Resonanzfrequenzen des Schwingkreises Messpunkt 2 (axial) und Messpunkt 3(radial)
Abbildung B.29: Transferadmittanzen bei verschiedenen Resonanzfrequenzen des Schwingkreises Mikrofon 1 und 2
74
Anhang C
Messergebnisse der aktiven
Dämpfung bei ruhendem Rad
C.1
347Hz
Abbildung C.1: Transferadmittanz Messpunkt 1 (axial)
75
ANHANG C. MESSERGEBNISSE DER AKTIVEN DÄMPFUNG BEI RUHENDEM
RAD
Abbildung C.2: Transferadmittanz Messpunkt 2 (axial)
Abbildung C.3: Transferadmittanz Messpunkt 3 (radial)
76
ANHANG C. MESSERGEBNISSE DER AKTIVEN DÄMPFUNG BEI RUHENDEM
RAD
Abbildung C.4: Transferadmittanz
Abbildung C.5: Transferadmittanz PZT2
77
ANHANG C. MESSERGEBNISSE DER AKTIVEN DÄMPFUNG BEI RUHENDEM
RAD
C.2
437Hz
Abbildung C.6: Transferadmittanz Messpunkt 1 (axial)
Abbildung C.7: Transferadmittanz Messpunkt 2 (axial)
78
ANHANG C. MESSERGEBNISSE DER AKTIVEN DÄMPFUNG BEI RUHENDEM
RAD
Abbildung C.8: Transferadmittanz Messpunkt 3 (radial)
Abbildung C.9: Transferadmittanz
79
ANHANG C. MESSERGEBNISSE DER AKTIVEN DÄMPFUNG BEI RUHENDEM
RAD
Abbildung C.10: Transferadmittanz PZT 1
C.3
653Hz
Abbildung C.11: Transferadmittanz Messpunkt 1 (axial)
80
ANHANG C. MESSERGEBNISSE DER AKTIVEN DÄMPFUNG BEI RUHENDEM
RAD
Abbildung C.12: Transferadmittanz Messpunkt 2 (axial)
Abbildung C.13: Transferadmittanz Messpunkt 3 (radial)
81
ANHANG C. MESSERGEBNISSE DER AKTIVEN DÄMPFUNG BEI RUHENDEM
RAD
Abbildung C.14: Transferadmittanz
Abbildung C.15: Transferadmittanz PZT 1
82
ANHANG C. MESSERGEBNISSE DER AKTIVEN DÄMPFUNG BEI RUHENDEM
RAD
C.4
860Hz
Abbildung C.16: Transferadmittanz Messpunkt 1 (axial)
Abbildung C.17: Transferadmittanz Messpunkt 2 (axial)
83
ANHANG C. MESSERGEBNISSE DER AKTIVEN DÄMPFUNG BEI RUHENDEM
RAD
Abbildung C.18: Transferadmittanz Messpunkt 3 (radial)
Abbildung C.19: Transferadmittanz
84
ANHANG C. MESSERGEBNISSE DER AKTIVEN DÄMPFUNG BEI RUHENDEM
RAD
Abbildung C.20: Transferadmittanz PZT 1
C.5
904Hz
Abbildung C.21: Transferadmittanz Messpunkt 1 (axial)
85
ANHANG C. MESSERGEBNISSE DER AKTIVEN DÄMPFUNG BEI RUHENDEM
RAD
Abbildung C.22: Transferadmittanz Messpunkt 2 (axial)
Abbildung C.23: Transferadmittanz Messpunkt 3 (radial)
86
ANHANG C. MESSERGEBNISSE DER AKTIVEN DÄMPFUNG BEI RUHENDEM
RAD
Abbildung C.24: Transferadmittanz
Abbildung C.25: Transferadmittanz PZT 1
87
ANHANG C. MESSERGEBNISSE DER AKTIVEN DÄMPFUNG BEI RUHENDEM
RAD
C.6
1304Hz
Abbildung C.26: Transferadmittanz Messpunkt 1 (axial)
Abbildung C.27: Transferadmittanz Messpunkt 2 (axial)
88
ANHANG C. MESSERGEBNISSE DER AKTIVEN DÄMPFUNG BEI RUHENDEM
RAD
Abbildung C.28: Transferadmittanz Messpunkt 3 (radial)
Abbildung C.29: Transferadmittanz
89
ANHANG C. MESSERGEBNISSE DER AKTIVEN DÄMPFUNG BEI RUHENDEM
RAD
Abbildung C.30: Transferadmittanz PZT 1
90
Anhang D
Messergebnisse der passiven
Dämpfung bei rollendem Rad
D.1
1428Hz
Abbildung D.1: Schnelle im Messpunkt 1 (axial)
91
ANHANG D. MESSERGEBNISSE DER PASSIVEN DÄMPFUNG BEI
ROLLENDEM RAD
Abbildung D.2: Schnelle im Messpunkt 2 (axial)
Abbildung D.3: Schnelle im Messpunkt 3 (radial)
92
ANHANG D. MESSERGEBNISSE DER PASSIVEN DÄMPFUNG BEI
ROLLENDEM RAD
Abbildung D.4: Schnelle im Messpunkt 4
93
Anhang E
Messergebnisse der aktiven
Dämpfung bei rollendem Rad
E.1
1428Hz
Abbildung E.1: Schnellespektrum mit und ohne Feedback, Messpunkt 1
94
ANHANG E. MESSERGEBNISSE DER AKTIVEN DÄMPFUNG BEI
ROLLENDEM RAD
Abbildung E.2: Schnellespektrum mit und ohne Feedback, Messpunkt 2 (Feedbacksensor)
Abbildung E.3: Schnellespektrum mit und ohne Feedback, Messpunkt 3
95
ANHANG E. MESSERGEBNISSE DER AKTIVEN DÄMPFUNG BEI
ROLLENDEM RAD
E.2
1428Hz - Dämpfung bei unterschiedlichen Drehzahlen
Abbildung E.4: Schnellespektrum in den Messpunkten 1-4 bei 87 U/min
96
ANHANG E. MESSERGEBNISSE DER AKTIVEN DÄMPFUNG BEI
ROLLENDEM RAD
Abbildung E.5: Schnellespektrum in den Messpunkten 1-4 bei 114 U/min
Abbildung E.6: Schnellespektrum in den Messpunkten 1-4 bei 155 U/min
97