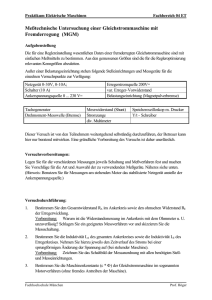
Geregelter Vier-Quadranten-Antrieb mit Gleichstrommaschine
Werbung

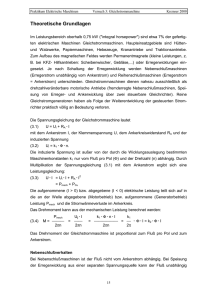
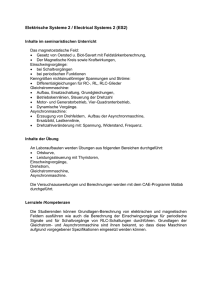
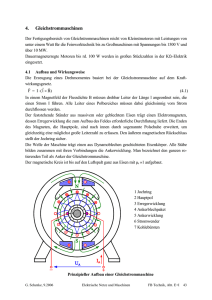
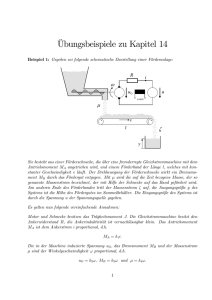
ENERGIETECHNISCHES PRAKTIKUM II Versuch 4: Geregelter Vier-Quadranten-Antrieb mit Gleichstrommaschine 1 EINLEITUNG....................................................................................................... 2 1.1 Last- und Antriebskennlinien.......................................................................................... 3 1.1.1 Lastkennlinien ....................................................................................................... 3 1.1.2 Fremderregte Gleichstrommaschine...................................................................... 4 1.1.3 Reihenschlussmaschine ......................................................................................... 5 1.2 Regelung einer fremderregten Gleichstrommaschine..................................................... 6 2 NETZGEFÜHRTER STROMRICHTER MIT SECHSPULS-BRÜCKENSCHALTUNG .. 8 3 SPEISUNG EINER FREMDERREGTEN GLEICHSTROMMASCHINE ÜBER NETZGEFÜHRTEN STROMRICHTER ................................................................. 11 4 REGELUNG EINES ELEKTRISCHEN ANTRIEBS MIT UMKEHRSTROMRICHTER13 5 SCHUTZMAßNAHMEN ...................................................................................... 17 6 VERSUCHSAUFBAU .......................................................................................... 18 7 VERSUCHSPROGRAMM .................................................................................... 20 8 VERSUCHSPROTOKOLL ................................................................................... 21 1 Einleitung In Industrie und Verkehr werden eine Reihe mechanischer Bewegungen mit unterschiedlicher Kraft und Geschwindigkeit benötigt. Die meisten dieser Bewegungen sind translatorisch oder rotatorisch. Sie werden heute zunehmend mit Hilfe von Elektromotoren rotatorisch vorgegeben und, falls erforderlich, in translatorische umgesetzt. Der Elektromotor ist ein elektromechanischer Wandler, der elektrische Energie in mechanische umsetzt. Zusammen mit einem Stellglied, das die elektrischen Größen des Netzes in die für den Motor erforderliche Form bringt, bildet er den Antrieb (Abbildung 1), der so auszulegen ist, dass die vom Anwender geforderten Bewegungen zustande kommen. Energiequelle Umrichter Maschine mech. Last (Energiesenke) Messsignale/ Schaltsignale/ Sensorsignale Steuersignale Steuerung/ Regelung Sensorsignale Antrieb Abbildung 1: Komponenten eines elektrischen Antriebssystems (Energiefluss im Motorbetrieb) Bei einem Antrieb mit fremderregter Gleichstrommaschine, wie er hier betrachtet wird, muss die Spannung am Anker abhängig von der Drehzahl und dem Moment verändert werden. Früher löste man diese Aufgabe mit einem Maschinenumformer, dem "Leonard-Satz", heute werden netzgeführte Stromrichter eingesetzt. Der Motor wird dabei aus einem vorhandenen Drehstromnetz über den Stromrichter mit Gleichspannung gespeist. Der Stromrichter dient als Stellglied für die Ankerspannung. Stromrichter zeichnen sich gegenüber den mechanischen Umformern durch eine Reihe guter Eigenschaften aus: • keine bewegten Teile (bis auf den Lüfter bei großen Leistungen), • geringe Verluste, • geringe Geräusche, • keine nennenswerte Wartung, • geringer Raumbedarf und kein besonderes Fundament. Die verwendete Stromrichterschaltung richtet sich nach den Forderungen, denen der Antrieb genügen muss. Wird z.B. nur ein positives Moment bei unterschiedlichen Drehrichtungen gefordert, so reicht ein netzgeführter Einfachstromrichter mit steuerbaren Ventilen aus (z.B. B6Schaltung). Werden von der Gleichstrommaschine zusätzlich auch negative Drehmomente verlangt, so ist ein Doppelstromrichter (auch Umkehrstromrichter genannt) erforderlich. Von den vielen Ausführungsmöglichkeiten eines Umkehrstromrichters wird in diesem Praktikumsversuch die kreisstromfreie Antiparallelschaltung mit zwei SechspulsBrückenschaltungen behandelt. 2 1.1 Last- und Antriebskennlinien 1.1.1 Lastkennlinien In Abbildung 2 sind einige idealisierte Grundtypen von Widerstandsmomenten dargestellt. Der Fall eines konstanten, drehzahlunabhängigen Widerstandsmomentes ist näherungsweise bei einem Aufzug gegeben (a). Ist das Moment vom Betrag her konstant, wechselt aber mit der Bewegungsrichtung das Vorzeichen, so wirkt das Widerstandsmoment immer bremsend. Ein Beispiel hierfür ist die trockene Reibung (b). Flüssige Reibung kennzeichnet sich dagegen durch ein geschwindigkeitsproportionales Widerstandsmoment (c). Eine Abhängigkeit vom Quadrat der Drehzahl ergibt sich bei Pumpen, Lüftern und der Luftreibung rotierender Maschinen (d). Abbildung 2: Idealisierte Lastkennlinien MW ist das Moment, das im stationären Betrieb auftritt. Bei Beschleunigungs- und Verzögerungsvorgängen kommt noch ein Beschleunigungsmoment MB hinzu, das dem Trägheitsmodn . ment J proportional ist: M B = 2π ⋅ J dt Bei der elektrisch erregten Gleichstrommaschine existiert der Freiheitsgrad, in welcher Art und Weise Anker- und Erregerkreis elektrisch verschaltet werden. Hierdurch ergeben sich verschiedene Typen von Gleichstrommaschinen, die im Folgenden diskutiert werden sollen. 3 1.1.2 Fremderregte Gleichstrommaschine Werden Ankerkreis und Erregerkreis von zwei getrennten Energiequellen versorgt, so spricht man von der fremderregten Gleichstrommaschine. Sie ist die in der heutigen Antriebstechnik weitverbreitetste Gleichstrommaschine, da bei ihr alle Freiheitsgrade der getrennten Steuerbarkeit des erregenden Feldes und des momentbildenden Ankerstromes erhalten bleiben. Ia Ra La Lf Ua Ui Rf M If Uf Abbildung 3: Ersatzschaltbild der fremderregten Gleichstrommaschine Für die Ankerspannung Ua gilt mit dem Fluss φ und der Maschinenkonstanten k die folgende Gleichung: U a = Ra I a + kφ 2πn . (1) Das Antriebsmoment Ma kann direkt über den Ankerstrom eingestellt werden: M a = kφ ⋅ I a . (2) Die Kennlinie der fremderregten Gleichstrommaschine, also die funktionale Abhängigkeit der Drehzahl vom Drehmoment, n = f(M), ergibt sich aus den Maschinengleichungen: n= U − Ra I a Ua Ra Ui = a = − ⋅M 2 p ⋅ kφ 2 p ⋅ kφ 2 p ⋅ kφ 2 p ⋅ (kφ ) 2 (3) Normalerweise wird der Fluss konstant gehalten. Als Kennlinie ergibt sich damit eine Gerade mit einer negativen Steigung (Abbildung 4), welche von Ra abhängt. Je größer Ra ist, desto stärker fällt die Drehzahl mit steigendem Drehmoment ab. Eine Maschine hoher Güte sollte daher einen möglichst kleinen Ankerwiderstand haben, so dass sich eine sehr steife (flache) nM-Kennlinie ergibt. Über die Ankerspannung kann die Drehzahl verstellt werden: steigt die Ankerspannung bei konstantem Drehmoment und Ankerstrom, so steigt auch die Drehzahl an. 4 n Ua n0,3 n0,2 n0,1 M Abbildung 4: Kennlinienschar der fremderregten Gleichstrommaschine Ist das Drehmoment M = 0, befindet sich die Maschine also im Leerlauf, so kann die Leerlaufdrehzahl n0 berechnet werden: n0 = Ua 2 p ⋅ kφ (4) 1.1.3 Reihenschlussmaschine Wird die Erregerwicklung in Serie (Reihe) mit der Ankerwicklung verschaltet, so erhält man die Reihenschlussmaschine. Ia Ra La Ua Ui Lf Rf M Uf Abbildung 5: Ersatzschaltbild der Reihenschlussmaschine Zur Berechnung der Kennlinie der Reihenschlussmaschine wird angesetzt, dass der Fluss proportional zum Ankerstrom ist: φ ~ I f = I a . Zusätzlich wird angenommen, dass keine Sättigung in der Maschine auftritt. Mit dem Proportionalitätsfaktor k’ gilt kφ = k ' I a M = k ' I a2 und 5 Daraus und aus den Maschinengleichungen lässt sich die Gleichung für die Kennlinie der Reihenschlussmaschine ableiten: n= U − ( Ra + Rf ) ⋅ I a Ua R + Rf Ui = a = − a 2 p ⋅ kφ 2 p ⋅ k '⋅I a 2p ⋅ k ' 2p ⋅ k ' ⋅ M (5) Der Verlauf der Kennlinie ist sehr charakteristisch, man spricht daher auch häufig vom Reihenschlussverhalten. Liegt kein Lastmoment an, so beschleunigt die Maschine auf sehr hohe Drehzahlen. Auf der anderen Seite sinkt die Drehzahl sehr stark mit dem Drehmoment ab. Abbildung 6: Die Kennlinie der Reihenschlussmaschine 1.2 Regelung einer fremderregten Gleichstrommaschine Die Vorgabe einer durch ein Stellglied einzustellenden Ankerspannung geschieht oft durch eine Steuerung, so dass komplizierte Lastzyklen (Reversieren, Beschleunigungsvorgänge etc.) exakt bewältigt werden können. Im Nachstehenden wird die Struktur der Drehzahlregelung einer Gleichstrommaschine, die über einen Stromrichter aus dem Netz gespeist wird, betrachtet (Abbildung 7). In einem inneren Regelkreis wird der Ankerstrom geregelt. Über die Maschinengleichungen, in der Gesamtheit auch als Maschinenmodell bezeichnet, wird aus dem Sollwert des Ankerstromes und der aktuellen Drehzahl die einzustellende Ankerspannung berechnet. Diese Vorgehensweise wird als Vorsteuerung oder feed forward control bezeichnet. Da die Parameter des Maschinenmodells aber fehlerhaft sein können und sich mit der Temperatur verändern, muss noch eine Rückkopplung eingefügt werden, welche auch als feed back control bezeichnet wird und eine Regelung im Gegensatz zu einer Steuerung auszeichnet. Die Differenz aus Sollund Istwert des Ankerstromes wird auf einen PI-Regler gegeben, dessen Ausgang noch zu den Ergebnissen, die aus den Berechnungen des Maschinenmodells resultieren, hinzuaddiert wird. Die PI-Regelung sorgt dafür, dass der Fehler der Regelungsgröße zu Null wird. Sie käme auch ohne die Vorsteuerung aus. Diese macht die Regelung jedoch schneller, da die Stellgröße in Form der Ankerspannung Ua über das Maschinenmodell berechnet wird, wodurch die Größenordnung der Stellgröße korrekt gewählt wird. Der PI-Regler muss dann nur noch den auftretenden Fehler ausregeln. 6 Ra+sLa n* PI M* 1 k I*a Vorsteuerung (feed forward) U*a Steuerungslogik Ui n PI 2pk AC n Ia DC (feed back) Rückkopplung M n Tacho Abbildung 7: Drehzahlregelung einer fremderregten Gleichstrommaschine Für den äußeren Drehzahlregelkreis wird die Drehzahl über ein Tachometer gemessen. Der Fehler der Drehzahl geht wiederum auf einen PI-Regler, dessen Ausgang in Form des Solldrehmomentes über die Erregung in den Sollstrom umgerechnet wird. 7 2 Netzgeführter Stromrichter mit Sechspuls-Brückenschaltung Richtet man mit der steuerbaren Sechspuls-Brückenschaltung (B6C-Schaltung) nach Abbildung 8 die Spannungen des Drehstromsystems gleich, so erhält man die in Abbildung 9 dargestellte gleichgerichtete Spannung U dia . U + Ldc n1 U10 n3 n5 i1 Ra U20 U12 U31 i2 U30 Udiα Uq U23 i3 n4 U n6 n2 _ Abbildung 8: Gesteuerte B6-Schaltung (B6C) mit Glättungsdrossel und Belastung mit Gegenspannung Als Last wurde eine Gleichstrommaschine, dargestellt durch die Quelle Uq und den Innenwiderstand Ra, und eine sehr große Glättungsinduktivität Ldc vorausgesetzt. Die Drossel erzwingt einen Strom Id, der als glatt angenommen werden kann. Dementsprechend sind die Ventilströme und die Netzströme i1 bis i3 blockförmig. Der Mittelwert der gleichgerichteten Spannung U dia kann über den Steuerwinkel a verstellt werden. Bei vereinfachter Rechnung (ideale Kommutierung) ergibt sich folgender Zusammenhang: U dia = 3 2 U 12 ⋅ cos α . π (6) Dabei ist U12 der Effektivwert der verketteten Leiterspannung. Dieser Zusammenhang wird als Steuerkennlinie des Stromrichters bezeichnet. 8 u U10 Û10 U20 U30 U+ 0 wt Ua u U12 Û12 U23 U31 Udiα 0 wt 2%3 π Id i i1 Id 0 wt 1 i1 -π 6 0 π 2 0 π 2 3π 2 π π 3π 2 2π 2π wt wt' Abbildung 9: Spannungs- und Stromverläufe der B6C-Schaltung für einen Steuerwinkel a = 45° Für Steuerwinkel von 0° bis 90° ist der Mittelwert der Ausgangsspannung positiv. Es wird vom Gleichrichterbetrieb gesprochen, bei dem die Energie von der Wechselstromseite zur Gleichstromseite transportiert wird. Für Steuerwinkel von 90° bis 180° ist der Mittelwert der Ausgangsspannung negativ, wie anhand von Gl. (6) zu sehen ist. Es wird vom Wechselrichterbetrieb gesprochen, bei dem die Energie von der Gleichstromseite zur Wechselstromseite transportiert wird. Dieser liegt vor, wenn die Gleichstrommaschine bremst und als Generator arbeitet. Im Gleichrichterbetrieb kann der Steuerwinkel ohne Einschränkung zwischen 0° und 90° eingestellt werden. Im Wechselrichterbetrieb ist der Steuerwinkelbereich nicht bis 180° ausnutzbar. Zum einen dauert die Stromumschaltung (Kommutierung) von einem Ventil auf das nächste wegen vorhandener Netzreaktanzen eine endliche Zeit, wobei der Kommutierungswinkel u mit dem Strom Id nichtlinear zunimmt. Außerdem ist einem Thyristor nach der 9 Leitzeit eine gewisse Erholzeit (Schonzeit tc) zu gewähren, bevor die Spannung am Thyristor wieder positiv wird. Ist a + u + wtc > 180°, so bleiben die stromführenden Ventile weiter leitend. Dieses Kommutierungsversagen nennt man Wechselrichterkippen. Der Stromrichter verbindet dann unzulässig lange die Gleichspannungsquelle mit einer einzigen Phase des Drehstromnetzes, so dass U dia verschwindet. Der Mittelwert des Stromes steigt daher vom Ausgangswert I d1 stark an und strebt gegen den Wert I d2 = U dc R a (Abbildung 10). Der Stromrichter kippt, d.h. er verliert seine Eigenschaft als Wechselrichter. Dieses führt bei Halbleiterstromrichtern in der Regel zur Zerstörung eines oder mehrerer Ventile, wenn diese nicht durch besonders angepasste Sicherungen oder Schnellschalter geschützt sind. Um eine ausreichende Schonzeit (auch bei minimaler Netzspannung) sicherzustellen, werden die zulässigen Steuerwinkel in der Regel auf z.B. 150° begrenzt. u U12 Û12 U23 U31 Udiα2 0 wt Udiα1 Ra Id2=Uq Uq Ra Id1 Kippen Abbildung 10: Zum Kippen des Wechselrichters Mit Gl. (2) wird der erforderliche Strom im Gleichstromkreis Ia = Id und mit Gl. (l) die notwendige Ankerspannung U a = U dia festgelegt. Im stationären Betrieb lassen sich so die gewünschte Drehzahl und das durch die Lastkennlinie gegebene Moment einstellen. Will man nun den Arbeitspunkt verstellen, so genügt es, die Spannung U dia entsprechend zu verändern. Da der Steuerwinkel sehr schnell beeinflusst werden kann, ist auch eine hohe Stromänderungsgeschwindigkeit möglich: Der Stromrichter ermöglicht somit auch dynamische Lastwechsel. Bei einer Drehzahlregelung ist i.a. eine Ankerstromregelung unterlagert, wodurch ein gutes dynamisches Verhalten erreicht wird. Außerdem lässt sich dabei leicht der Ankerstrom begrenzen, was zum Schutz des Antriebes erforderlich ist. Der Leitbereich jedes Thyristors beträgt bei Vernachlässigung der Kommutierung 120°. Der Netzstrom ergibt sich aus der Überlagerung der einzelnen Ströme in den Ventilen (s. i1 in Abbildung 9). Verwendet man einen gesteuerten Stromrichter, so ist näherungsweise die Phasenverschiebung zwischen der Grundschwingung von Netzstrom und Netzspannung gleich dem Steuerwinkel a. 10 3 Speisung einer fremderregten Gleichstrommaschine über netzgeführten Stromrichter Die Drehzahl der konstant erregten Antriebsmaschine wird mit der Ankerspannung in Abhängigkeit des Momentes festgelegt. Mit größer werdendem Steuerwinkel wird die Spannung und damit die Drehzahl kleiner und schließlich bei a » 90° zu Null. Treibt man nun die Maschine entgegen ihrem motorischen Drehsinn an, so wird sie zum Generator und liefert bei gleicher Strom- und Drehmomentrichtung eine negative Spannung. Mit Hilfe einer B6-Schaltung als Stromrichter kann man, wie Abbildung 11 zeigt, nur die Hälfte des Betriebsdiagramms der fremderregten Gleichstrommaschine einstellen, da nur ein positiver Strom und damit ein positives Moment eingestellt werden kann. Der Drehsinn der Maschine bestimmt, ob sie als Motor oder als Generator läuft. Udia Udi0 1,0 a=0 0,5 0 a = 90° Id,max Idc -0,5 a = 150° -1,0 Abbildung 11: Betriebsbereich eines Einfachstromrichters Schaltet man zwei gesteuerte B6-Brücken so zusammen, dass im Gleichstromkreis verschiedene Stromrichtungen möglich sind, so kann die Gleichstrommaschine in beiden Drehrichtungen angetrieben und gebremst werden (Vierquadrantenantrieb, Abbildung 12). 11 Udia Udi0 1,0 a2 = 150° a1 = 0° 0,5 0 Id,max Idc a1 = 90° -0,5 a2 = 0° a1 = 150° -1,0 Abbildung 12: Betriebsbereich des Umkehrstromrichters Eine mögliche Schaltung ist der kreisstromfreie Umkehrstromrichter, der in diesem Praktikumsversuch verwendet wird (Abbildung 13). Ldc i1 i2 Udia i3 Id Abbildung 13: Schaltung eines kreisstromfreien Umkehrstromrichters Wegen des begrenzten Steuerwinkels im generatorischen Betrieb ist die verfügbare Spannung kleiner als im motorischen Betrieb. Das führt zu Schwierigkeiten, wenn der Steuerwinkel nicht auch zu kleinen Werten hin begrenzt wird. 12 4 Regelung eines elektrischen Antriebs mit Umkehrstromrichter Die Regelung eines Umkehrstromrichters muss nach den Anforderungen des elektrischen Antriebes ausgelegt sein. Häufig wird von der Gleichstrommaschine eine genau einstellbare Drehzahl verlangt. Das Drehmoment wird dabei durch die mechanische Belastung vorgegeben und ist meistens nicht konstant. Für diese Anforderungen sind die Regler der Umkehrstromrichter normalerweise ausgelegt; auch der in diesem Versuch verwendete arbeitet nach diesem Prinzip. Die wesentlichen Regelparameter sowie Schwellen, die den Eingriff von Schutzeinrichtungen bewirken, können von dem Benutzer dem jeweiligen Antriebsproblem durch Einlöten entsprechender Widerstände und Kondensatoren angepasst werden. Das Regelkonzept (Stromleitverfahren) ist für einen Einfachstromrichter in Abbildung 14 dargestellt. In der inneren Regelschleife wird der Stromsollwert mit dem Stromistwert verglichen. Die Differenz wird in einem Regelverstärker (Stromregler) mit PI-Verhalten verstärkt und auf ein Linearisierungsglied gegeben, das die Steuerspannung für den Impulserzeuger liefert. Der Zündwinkelgenerator stellt die Verzögerung der Zündimpulse gemäß dieser Steuerspannung ein. Der, wie die Steuerkennlinie (Gleichung 6) zeigt, von Natur aus Cosinusförmige Zusammenhang zwischen dem Zündwinkel und der Spannung U dia wird durch die Linearisierung kompensiert, so dass die Ausgangsspannung des Stromrichters U dia proportional zu der Ausgangsspannung des Stromreglers ist. Der sich aufgrund der Ausgangsspannung und der Last einstellende Gleichstrom wird typischerweise auf der Wechselstromseite des Stromrichters gemessen und als Stromistwert in den inneren Regelkreis zurückgeführt. Abbildung 14: Struktur der Regelung eines Antriebs mit Einfachstromumrichter und fremderregter Gleichstrommaschine In dem übergeordneten Drehzahlregelkreis wird die Istdrehzahl mit der Solldrehzahl verglichen. Die Differenz wird mit einem Regelverstärker (Drehzahlregler) mit PI-Verhalten verstärkt und ergibt den Stromsollwert für den unterlagerten Stromregelkreis. Dieser Stromsollwert wird zum Schutz des Umkehrstromrichters begrenzt. Da der Strom im unmittelbaren 13 Zusammenhang mit dem Drehmoment der Gleichstrommaschine steht, ist deren maximales Drehmoment ebenfalls begrenzt. Die Strombegrenzung kann verändert und so den jeweiligen Anforderungen angepasst werden. Der Stromrichter hat eine statistisch schwankende Totzeit, weil eine plötzliche Zündwinkelverstellung nicht unmittelbar, sondern erst beim Zünden des nächsten Ventils wirksam werden kann. Die Regelung eines Umkehrstromrichters erfordert zusätzliche Maßnahmen, wie aus Abbildung 15 zu entnehmen ist. Bei dem hier verwendeten kreisstromfreien Umkehrstromrichter darf jeweils nur ein Teilstromrichter, d.h. eine B6-Brücke, Strom führen und Zündimpulse erhalten. Die Umschaltung der Stromrichtung wird von einer Umsteuerung herbeigeführt. Wenn der Stromsollwert, der vom Drehzahlregler geliefert wird, einen Wechsel der Stromrichtung erfordert, muss abgewartet werden, bis der Strom in der alten Richtung Null geworden ist. Steuern der Zündimpulse in Wechselrichterendlage (maximales a) beschleunigt dies und verhindert ein ungewolltes Wiederansteigen des Stromes. Eine StromnullErkennungsschaltung gibt bei Unterschreiten einer sehr kleinen Stromschwelle das Stromnullsignal aus. Nach Sperrung der Zündimpulse muss eine stromlose Pauseabgewartet werden (Größenordnung l ms), welche die Schonzeit der Thyristoren enthält. Danach werden die Zündimpulse für den Teilstromrichter der neuen Stromrichtung freigegeben . Da die Ausgangsspannung des einen Teilstromrichters mit a zunimmt und die des anderen mit a abnimmt, ändert sich (wenn keine besondere Maßnahme getroffen wird), beim Umschalten der Regelsinn der Stromregelstrecke. Dieses wird dadurch vermieden, dass der Stromistwert bereits als Betrag gemessen und die Polarität des Stromsollwertes beim Umschalten gewechselt wird. 14 Abbildung 15: Struktur der Regelung eines Antriebes mit kreisstromfreiem Umkehrstromrichter und fremderregter Gleichstrommaschine 15 Die induzierte Spannung der Gleichstrommaschine Uq, die für die Stromregelung eine Störgröße darstellt, ändert sich nur langsam, so dass für die beiden gleichgerichteten Spannungen vor und nach der Umschaltung gilt: U q ≈ U diα 1 = U diα 0 cos α1 ≈ U diα 2 = −U diα 0 cos α 2 . Der Steuerwinkel muss demnach auch bei langsamen Stromänderungen im allgemeinen über einen großen Bereich springen: α 2 ≈ π − α1 . Da der Stromregler seinen Ausgangswert nicht schnell genug ändern kann, wird zum Ausgang des Stromreglers ein dem Mittelwert der gleichgerichteten Spannung proportionaler Wert addiert: Störgrößenaufschaltung, hier Spannungsaufschaltung. Ein Polaritätswechsel dieses Wertes bei Umschalten liefert die erforderliche Zündwinkeländerung. Der Stromregler braucht somit nur noch den "dynamischen Anteil" der gleichgerichteten Spannung einzustellen, das ist näherungsweise (bei Vernachlässigung der ohmschen Widerstände) die Differenz zwischen dem Mittelwert der gleichgerichteten Spannung und der in der Maschine induzierten Spannung, die an der Induktivität im Ankerkreis auftritt. 16 5 Schutzmaßnahmen Im normalen Betrieb übernimmt die Steuer- und Regeleinrichtung den Schutz der Anlage. Die eingebaute Strombegrenzung verhindert Überströme, die z.B. bei Laststößen und Drehzahlsollwertsprüngen auftreten würden. Auch das speisende Netz wird überwacht. Bei Unterspannung oder starker Unsymmetrie werden die Zündimpulse gesperrt. Das vorgeschaltete Netzschütz kann nur stromlos schalten. Für den Fall, dass die Regelung versagt oder ein Kurzschluss auftritt, sind auf der Wechselstromseite des Umkehrstromrichters (s. Abbildung 16) Induktivitäten und Sicherungen vorhanden. Die Netzdrosseln begrenzen den Anstieg des Stromes in den Thyristoren, bis die Sicherungen auslösen. Bei diesen Sicherungen muss es sich um sehr schnelle Sicherungen mit definiertem Grenzlastintegral handeln, die außerdem für den Langzeitbereich angepasst sein müssen. Abbildung 16: Leistungsteil des Stromrichtergerätes Um Überspannungen an den Thyristoren zu begrenzen, ist ein kleiner Hilfsgleichrichter vorhanden (Abbildung 16 unten), der in Verbindung mit den Netzdrosseln Spannungsspitzen des Netzes auf zulässige Werte reduziert und auch als TSE-Beschaltung wirkt. 17 6 Versuchsaufbau Abbildung 17: Versuchsaufbau 18 In Abbildung 17 ist der Versuchsaufbau dargestellt. Über einen kreisstromfreien Umkehrstromrichter, der aus zwei antiparallel geschalteten B6-Brückenschaltungen besteht, wird der Anker einer Gleichstrommaschine gespeist. Die Erregung dieser Gleichstrommaschine erfolgt ungeregelt über einen Hilfsgleichrichter. Ein Tachogenerator auf der Antriebswelle liefert das Drehzahlsignal. Das Lastmoment wird von der Belastungsmaschine aufgebracht. Durch die pendelnde Aufhängung ihres Ständers ist es möglich, das Drehmoment mit einem Biegestab zu erfassen. Auf beiden Seiten des Biegestabes sind je zwei Dehnungsmessstreifen aufgeklebt, welche die Dehnung oder Stauchung an der Oberfläche des Stabes in Änderungen ihrer Widerstände überführen. Sie sind zu einer Wheatstoneschen Brücke verschaltet, die von einer konstanten Spannung gespeist wird und eine dem Drehmoment proportionale Spannung liefert. Der Leonard-Satz, der aus einer Asynchronmaschine und einer fremderregten Gleichstrommaschine besteht, ermöglicht den Energietransport vom Drehstromnetz ins Gleichstromnetz und umgekehrt. Er erfüllt prinzipiell die gleichen Aufgaben wie ein Umkehrstromrichter. Die Steuerung erfolgt über das Feld der Gleichstrommaschine. Dessen Größe kann mit einem Stelltransformator und seine Richtung mit einem Umschalter verändert werden. 19 7 Versuchsprogramm 1. Erläutern Sie den Sinn folgender Bauelemente in Verbindung mit einem Umkehrstromrichter: • Netzschütz, • Sicherungen, • Netzdrosseln, • Stromregelkreis, • Überspannungsschutz, • Regel- und Steuereinheit und • Glättungsdrossel. 2. Stellen Sie die Strom- und Spannungsverläufe für a = 75° und a =105° auf einem Oszilloskop dar und zeichnen Sie diese. 3. Aufnahme der Kennlinie n = f(M) der Antriebsmaschine für verschiedene Solldrehzahlen. Erläutern Sie die Kennlinien. 4. Messung und Diskussion der Zeiten, die der Antrieb benötigt a : zum Hochlaufen (von Stillstand bis Höchstdrehzahl) b : zum Reversieren (von positiver zu negativer Höchstdrehzahl) c : zum Bremsen (von Höchstdrehzahl auf Stillstand) d : zum Auslaufen (von Höchstdrehzahl auf Stillstand). 20 8 Versuchsprotokoll Abbildung 18: Vorlage zu 7.2 21 n / min -1 t Abbildung 19: Vorlage zu 7.4 a) n / min-1 t Abbildung 20: Vorlage zu 7.4 b) 22 -1 n / min t Abbildung 21: Vorlage zu 7.4 c) -1 n / min t Abbildung 22: Vorlage zu 7.4 d) (Id = 0) 23