Regelungstechnik - WS 2011/2012 - Institut für Automatisierungs
Werbung

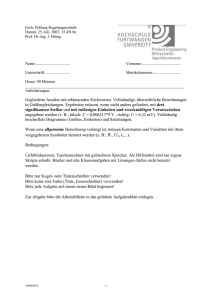
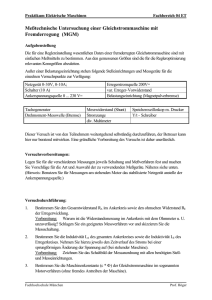
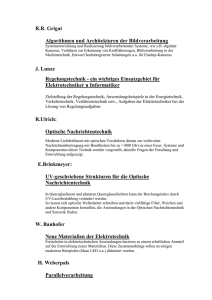
3 Modellbildung, Simulation und Reglerentwurf Ziel dieser Übung ist die mathematische Modellbildung, Simulation und Regelung von dynamischen Systemen. Bei den Systemen handelt es sich zum einen um eine einfache Operationsverstärkerschaltung und zum anderen um eine Gleichstrommaschine mit Propeller. Die Modellierung dieser Systeme erfolgt mit Hilfe der Kirchhoffschen Regeln, den jeweiligen Beschreibungen der (idealen) elektrischen Bauteile sowie den grundlegendenden Bewegungsgleichungen der Mechanik. Der Reglerentwurf soll mittels Frequenzkennlinienverfahren (FKL) sowohl im s-Bereich als auch im q-Bereich erfolgen. Die für die Zeitdiskretisierung und den Reglerentwurf nach dem Frequenzkennlinienverfahren benötigten Grundlagen wurden in der VU Automatisierung vorgestellt. Studieren Sie daher zur Vorbereitung dieser Übung das folgende Skriptum: • Skriptum zur VU Automatisierung (WS 2011/12) [3.2] – Kapitel 1 bis Kapitel 6 Bei Fragen oder Anregungen zu dieser Übung wenden Sie sich bitte an • Martin Niederer <[email protected]> oder • Stephan Strommer <[email protected]>. 3.1 Elektrisches System In der folgenden Aufgabe soll das elektrische System aus Abbildung 3.1 untersucht werden. Das betrachtete Netzwerk besteht aus einem Operationsverstärker (OP), aus den Kapazitäten C1 und C2 sowie aus den Widerständen R1 , R2 und R3 . Weiterhin bezeichnet Us eine auftretende Störung. Aufgabe 3.1 (Modellierung). 1. Leiten Sie unter der Annahme eines idealen Operationsverstärkers das mathematische Modell des elektrischen Netzwerks aus Abbildung 3.1 in der Form ẋ = Ax + bu u + bd d T y=c x (3.1a) (3.1b) mit der Spannung Ue (t) als Eingang u bzw. der Spannung Us (t) als Störeingang Laborübung Regelungstechnik (WS 2011/2012) © Institut für Automatisierungs- und Regelungstechnik, TU Wien 3.1 Elektrisches System Seite 26 C1 Us UC1 R2 iein,p Ue R1 R2 ud UC2 C2 OP V− V+ (K − 1)R3 Ua iein,n R3 Abbildung 3.1: Elektrisches System. d sowie der Spannung Ua (t) als Ausgang y, in Maple her. Wählen Sie dazu i h die beiden Kondensatorspannungen als Systemzustände xT = UC1 UC2 . Beachten Sie weiterhin die eingetragene Pfeilrichtung. Hinweis: Unter einem idealen OP versteht man einen Verstärker, bei dem die beiden Eingangsströme iein,p und iein,n , sowie die Differenzspannung ud gleich Null sind. 2. Bestimmen Sie die Übertragungsfunktion Tu,y (s) und das entsprechende Bodediagramm des elektrischen Netzwerks (3.1) in Maple. 3. Bei der Übertragungsfunktion Tu,y (s) aus Punkt 2 handelt es sich um ein Verzögerungsglied 2. Ordnung (PT2 ) mit der Übertragungsfunktion in der Form V . Bestimmen Sie in Maple die beiden Widerstände Tu,y (s) = 1 s2 +2 D s+1 ω2 K ωK R1 und R2 so, dass der Dämpfungsgrad D = 0.8 und die Knickfrequenz ωK = 1000 s−1 beträgt. Wählen Sie dazu die Kapazitäten C1 = C2 = 1 µF und K = 3. Hinweis: Zur Überprüfung Ihrer Ergebnisse sei an dieser Stelle die numerische Dynamikmatrix und die zugehörigen Eingangsvektoren des Systems (3.1) angegeben " # −1886.79 s−1 −5373.59 s−1 , A= 286.79 s−1 286.79 s−1 " # 1600 s−1 bu = , 0 Laborübung Regelungstechnik (WS 2011/2012) © Institut für Automatisierungs- und Regelungstechnik, TU Wien " # 0 . bd = 286.79 s−1 3.1 Elektrisches System Seite 27 Aufgabe 3.2 (Implementierung in Matlab/Simulink). 1. Öffnen Sie das M-file Parameter.m aus dem zip-Archiv uebung3.zip auf der Homepage der Lehrveranstaltung und ergänzen Sie die Systemmatrix A, den Eingangsvektor bu , den Vektor der Störung bd sowie den Ausgangsvektor c an entsprechender Stelle. Ergänzen Sie die zuvor berechneten Widerstände R1 und R2 . 2. Generieren Sie mit Hilfe des Matlab-Befehl ss() die Zustandsdarstellung des Systems 3.1. Weiterhin soll mit dem Matlab-Befehl tf() die Übertragungsfunktion dieser Zustandsdarstellung ermittelt werden. Implementieren Sie dies ebenfalls im M-File Parameter.m. 3. Öffnen Sie das Matlab/Simulink-Modell Modell_elektrisch.mdl und ergänzen Sie im State-Space-Block die Systemmatrizen A, bu , bd und c. Hinweis: Beachten Sie, dass im Falle des Systems 3.1 kein direkter Durchgriff vom Eingang zum Ausgang auftritt. Im State-Space-Block ist dies mit einem Nullvektor zu implementieren. Weiterhin ist zu beachten, dass sowohl die Eingangsspannung Ue als auch die Störspannung Us Eingangsgrößen des StateSpace-Blocks sind. 4. Im Folgenden soll das Verhalten des Systems untersucht werden. Als Eingangsspannung steht Ihnen im Modell aus Punkt 3 eine sprungförmige sowie eine sinusförmige Eingangsgröße Ue (t) zur Verfügung. Variieren Sie die Frequenz der sinusförmigen Eingangsgröße z.B. gemäß der Folge [10 Hz, 100 Hz, 1 kHz, 10 kHz]. Welches Systemverhalten können Sie hierbei erkennen? Vergleichen Sie das simulierte Systemverhalten mit dem Bodediagramm der Strecke. 5. Untersuchen Sie das Systemverhalten unter Berücksichtigung einer sprungförmigen Störung. Aufgabe 3.3 (Reglerentwurf). In dieser Aufgabe soll ein zeitkontinuierlicher PI-Regler für das elektrische System(3.1) nach dem Frequenzkennlinienverfahren entworfen werden. Der geschlossene Kreis soll dabei folgende Spezifikationen erfüllen: bleibende Regelabweichung Überschwingen Anstiegszeit e∞ |r(t)=σ(t) = 0 ü ≤ 5%. tr = 3 ms 1. Ist das Frequenzkennlinienverfahren ein exaktes Entwurfsverfahren, wenn - wie im vorliegenden Fall - die Strecke ein Verzögerungsglied 2.Ordnung ist? Laborübung Regelungstechnik (WS 2011/2012) © Institut für Automatisierungs- und Regelungstechnik, TU Wien 3.2 Gleichstrommaschine mit Propeller Propeller Seite 28 LGSM RGSM i GSM MrGSM cGSM P MP JP ϕP , ωP (a) JGSM dGSM P MGSM MGSM ϕGSM , ωGSM ΨEGSM uiGSM uGSM ϕGSM , ωGSM (b) Abbildung 3.2: Gleichstrommaschine mit Propeller, (a) mechanisches Teilsystem, (b) elektrisches Teilsystem. 2. Schreiben Sie in Matlab ein M-file, in dem Sie den Entwurf des PI-Reglers nach dem Frequenzkennlinienverfahren durchführen. 3. Erweitern Sie das Simulationsmodell aus Aufgabe 3.2 um den in der obigen Teilaufgabe entworfenen PI-Regler. 4. Verifizieren Sie das Führungsverhalten des geschlossenen Kreises für eine sprungförmigen Eingangsgröße ohne Störung. Überprüfen Sie das Ergebnis mit Hilfe des Endwertsatzes der Laplace-Transformation. 5. Untersuchen Sie weiterhin das Verhalten des geschlossenen Kreises unter Berücksichtigung der Störspannung Us . 6. Beurteilen Sie die Stabilität des geschlossenen Regelkreises. Begründen Sie Ihre Antwort. 3.2 Gleichstrommaschine mit Propeller Abbildung 3.2 zeigt schematisch eine permanenterregte Gleichstrommaschine (GSM), die über eine linear elastische und dämpfende Welle (konstante Steifigkeit cGSM P , viskose Dämpfung dGSM P ) einen Propeller (P) antreibt. Die mechanischen Freiheitsgrade des Systems sind die beiden Drehwinkel ϕGSM und ϕP . Die zugehörigen Winkelgeschwindigkeiten werden mit ωGSM und ωP benannt. Im Folgenden wird stets von ωGSM > 0 und ωP > 0 ausgegangen. Auf den Propeller (Massenträgheitsmoment JP ) wirkt ein Lastmoment der Form MP = dvP ωP + dqP ωP2 + Mext , (3.2) wobei dvP die viskose Dämpfungskonstante, dqP der Koeffizient des zum Geschwindigkeitsquadrat proportionalen Dämpfungsanteils und Mext ein zusätzliches externes Moment ist. Das Massenträgheitsmoment der Gleichstrommaschine wird mit JGSM bezeich- Laborübung Regelungstechnik (WS 2011/2012) © Institut für Automatisierungs- und Regelungstechnik, TU Wien 3.2 Gleichstrommaschine mit Propeller Seite 29 net. Die Lagerung des Ankers verursacht ein Reibmoment der Form MrGSM = dcGSM + dvGSM ωGSM (3.3) mit der Coulombschen Reibkonstante dcGSM und der viskosen Dämpfungskonstante dvGSM . Das von der (idealen) Gleichstrommaschine erzeugte elektrische Moment ist MGSM = kGSM iGSM , wobei kGSM die Ankerkreiskonstante kGSM = cA ΨEGSM bezeichnet. Für die induzierte Spannung gilt uindGSM = kGSM ωGSM . Die Ankerkreisinduktivität wird mit LGSM , der Ankerkreiswiderstand mit RGSM und die Eingangsspannung mit uGSM bezeichnet. Aufgabe 3.4 (Modellierung). 1. Berechnen Sie das mathematische Modell des mechanischen Teilsystems nach Abbildung 3.2(a) mit Hilfe der Impulserhaltung. Stellen Sie das Modell in der Form ẋm = fm (xm , um ) (3.4) h T = dar und wählen Sie dazu die Zustandsgrößen xm ϕGSM h T = und die Eingänge um MGSM rechnungen in Maple durch. i ωGSM ϕP ωP i Mext . Führen Sie die entsprechenden Be- 2. Im System (3.4) treten die Größen ϕGSM und ϕP stets in Form der Differenz (ϕGSM − ϕP ) = ϕGSM P auf. Mit Hilfe der nichtregulären Zustandstransformation xM 1 0 −1 0 ϕ GSM P = ωGSM = 0 1 0 0 xm 0 0 0 1 ωP (3.5) kann daher eine Differentialgleichung eingespart werden. Führen Sie diese Transformation durch, d. h. bestimmen Sie ẋM = fM (xM , uM ), (3.6) wobei uM = um gelten soll. 3. Bestimmen Sie das mathematische Modell des elektrischen Teilsystems nach Abbildung 3.2(b) in der Form ẋE = fE (xE , uE ). (3.7) h T = Verwenden Sie den Zustand xE = iGSM und die Eingänge uE ωGSM Laborübung Regelungstechnik (WS 2011/2012) © Institut für Automatisierungs- und Regelungstechnik, TU Wien i uGSM . 3.2 Gleichstrommaschine mit Propeller Seite 30 4. Vereinigen Sie die beiden Teilmodelle (3.6) und (3.7) so, dass das resultierende dynamische System ẋ = f (x, u, d) (3.8a) y = h(x) (3.8b) den Zustandsvektor h i h T xT = xE xM = iGSM ϕGSM P ωGSM i ωP , (3.9) den Eingang u = uGSM und die Störung d = Mext besitzt. Als Ausgang des Systems soll y = ωP verwendet werden. Bestimmen Sie für stationäre Eingangswerte die Ruhelage des Systems (3.8), linearisieren Sie es bezüglich derselben und stellen Sie es in der Form ∆ẋ = A∆x + bu ∆u + bd ∆d T ∆y = c ∆x (3.10a) (3.10b) dar. Berechnen Sie weiterhin die Eigenwerte der Dynamikmatrix des linearisierten Systems, wobei die Parameterwerte aus Tabelle 3.1 und für die stationären Eingangsgrößen uGSM,R = 12 V und Mext,R = 0 N m zu verwenden sind. 5. Berechnen Sie die Übertragungsfunktion G(s) = ∆ŷ(s) ∆û(s) (3.11) des unter 4 linearisierten Systems, wobei wiederum die Parameterwerte aus Tabelle 3.1 und für die stationären Eingangsgrößen uGSM,R = 12 V und Mext,R = 0 N m zu verwenden sind. Bestimmt man die Eigenwerte λi mit i = 1, . . . , 4 der Dynamikmatrix A des um die Ruhelage linearisierten Systems (3.10), so ergeben sich diese in aufsteigend sortierter Reihenfolge zu λ1 = −435.612 s−1 , λ2 = −26.811 s−1 + I 8.459s−1 , λ3 = −26.811 s−1 − I 8.459s−1 und λ4 = −3.925 s−1 . Offensichtlich ist das System (lokal) asymptotisch stabil. Auffällig ist jedoch, dass |λ1 | ≫ |λi | ∀ i ∈ {2, 3, 4}, (3.12) d. h. der Eigenwert λ1 liegt in der komplexen Ebene sehr viel weiter links als die übrigen Eigenwerte, was eine relativ schnelle Dynamik im zugehörigen Unterraum der Lösung nach sich zieht. Es lässt sich nun mit Hilfe der singulären Störungstheorie [3.1] zeigen, dass dieser Eigenwert zumindest näherungsweise der Stromdynamik zugewiesen werden darf. Somit kann in weiterer Folge die Dynamik des elektrischen Teilsystems als quasistationär betrachtet werden, womit sich die zugehörige Differentialgleichung zu einer algebraischen Gleichung Laborübung Regelungstechnik (WS 2011/2012) © Institut für Automatisierungs- und Regelungstechnik, TU Wien 3.2 Gleichstrommaschine mit Propeller Seite 31 Parameter Wert 2.8 1.3731 0.0625 58.5 · 10−6 0.0173 26.37 · 10−6 0.001 1.6129 · 10−4 1.0406 · 10−6 47.746 · 10−3 1 · 10−4 LGSM RGSM kGSM JGSM dcGSM dvGSM JP dvP dqP cGSM P dGSM P mH Ω Vs kg m2 Nm N m s/rad kg m2 N m s/rad N m s2 /rad2 N m/rad N m s/rad Tabelle 3.1: Parameter des Systems Gleichstrommaschine mit Propeller. der Form iGSM = 1 RGSM uGSM − kGSM ωGSM RGSM (3.13) reduziert. Aufgabe 3.5 (Reduziertes System). 1. Verwenden Sie die Näherung (3.13) um im System (3.8) die zugehörige Differentialgleichung der Stromdynamik zu eliminieren. Damit erhalten Sie ein reduziertes System ẋred = fred (xred , u, d) (3.14a) y = hred (xred ) (3.14b) h T = mit dem neuen Zustandsvektor xred ϕGSM P ωGSM u, Störung d und Ausgang y unverändert bleiben. i ωP , wobei Eingang 2. Bestimmen Sie für stationäre Eingangswerte die Ruhelage des reduzierten Systems (3.14) und linearisieren Sie es bezüglich derselben. 3. Ist die Ruhelage des reduzierten Systems (3.14) gleich jener des vollständigen Systems (3.8)? Begründen Sie Ihre Antwort. Laborübung Regelungstechnik (WS 2011/2012) © Institut für Automatisierungs- und Regelungstechnik, TU Wien 3.2 Gleichstrommaschine mit Propeller Seite 32 4. Berechnen Sie die Übertragungsfunktion Gred (s) = ∆ŷ(s) ∆û(s) (3.15) des unter 2 linearisierten Systems in Maple, wobei wiederum die Parameterwerte aus Tabelle 3.1 und für die stationären Eingangsgrößen uGSM,R = 12 V und Mext,R = 0 N m zu verwenden sind. Berechnen Sie die zugehörige Sprungantwort von Gred (s) und stellen Sie diese grafisch in Maple dar. Vergleichen Sie das Ergebnis mit der Sprungantwort in Aufgabe 3.4 (Punkt 4 und 5) erhaltenen linearisierten Systems (3.10) bzw. (3.11). Hinweis: Zur Berechnung der Sprungantwort in Maple können Sie z. B. den Befehl invlaplace(G/s,s,t) aus dem Package inttrans verwenden. Aufgabe 3.6 (Implementierung in Matlab/Simulink). Erstellen Sie für das System Gleichstrommaschine mit Propeller ein Simulationsmodell. Es soll das vollständige nichtlineare Modell (3.8) (inklusive Stromdynamik) in Form einer Level 2 M-Code T S-function enthalten. Wählen Sie hierzu als Eingang h der S-function den Vektori u = i h T uGSM Mext und als Ausgangsvektoren y1 = iGSM ϕGSM P ωGSM ωP bzw. h i y2T = MGSM MKopp . Hierbei bezeichnet MGSM das elektrische Moment der GSM und Mkopp das Kopplungsmoment zwischen Motor und Propeller, also das über die Feder cGSM P und den Dämpfer dGSM P übertragene Moment. Verwenden Sie als Anfangszustand die Ruhelage für uGSM = 12 V und Mext = 0 N m. Weiterhin sollen die Eingangsgrößen folgende Verläufe aufweisen: uGSM = 12 − 2σ(t − 2) + 2σ(t − 5) − 4σ(t − 8) + 4σ(t − 13) und Mext = 0.05σ(t − 11) (uGSM in V und Mext in Nm). Laborübung Regelungstechnik (WS 2011/2012) © Institut für Automatisierungs- und Regelungstechnik, TU Wien 3.2 Gleichstrommaschine mit Propeller Seite 33 Hinweis: Beachten Sie bei der Implementierung nachfolgende Punkte: • Alle Systemparameter und Anfangszustände sollen als Parameter von außen an die S-function übergeben werden. Definieren Sie diese Größen in einem M-file, das Sie jeweils vor dem Start der Simulation ausführen. • Übernehmen Sie dabei die analytischen Ausdrücke der Ruhelagen und des linearisierten Modells aus der in Aufgabe 3.4, Teilaufgabe 4 erstellten Maple-Arbeitsblatt-Datei in besagtes M-file und berechnen Sie erst dort die numerischen Werte. Damit ist es später einfach möglich beliebige Ruhelagen zu untersuchen. Weiterhin steht Ihnen zum Test und Abgleich ihres Modells im zip-Archiv uebung3.zip auf der Homepage der Lehrveranstaltung die Datei GSM_Student_S_m.p zum Download zur Verfügung. Es handelt sich um eine chiffrierte Sfunction der Gleichstrommaschine. Die Einbindung erfolgt analog zur Level 2 M-file S-function und ist im Simulationsmodell Simulation_GSM_out.mdl gezeigt. Das Modell enthält bereits die oben genannten Verläufe der Eingangsgrößen. Lediglich die berechnete Ruhelage x0 aus der Aufgabe 3.4 Punkt 4 ist in der Maske der S-function des vollständigen Modells (3.8) zu ergänzen. Um Namenskonflikte zu vermeiden, darf die von Ihnen erstellte s-function nicht den Namen GSM_Student_S_m.m tragen. Aufgabe 3.7 (Reglerentwurf). Entwerfen Sie mit Hilfe des Frequenzkennlinienverfahrens im q-Bereich einen zeitdiskreten Regler für das linearisierte Modell (3.14) der Gleichstrommaschine mit Propeller mit der Winkelgeschwindigkeit ∆ωP als Ausgang. Als Arbeitspunkt für den Betrieb des Reglers wählen Sie die von Ihnen berechnete Ruhelage aus Aufgabe 3.4 Punkt 4 für uGSM,R = 12V und Mext,R = 0Nm. Das Verhalten des geschlossenen Kreises soll möglichst schnell sein und dabei folgende Spezifikationen für einen Sollsprung ∆r = 20 rad/s erfüllen: bleibende Regelabweichung Überschwingen Stellgrößenbeschränkung e∞ |(rk )=(1k ) = 0 ü ≤ 10%. 0 ≤ uGSM ≤ 24 V Beurteilen Sie die Stabilität des geschlossenen Regelkreises. Begründen Sie Ihre Antwort. Laborübung Regelungstechnik (WS 2011/2012) © Institut für Automatisierungs- und Regelungstechnik, TU Wien 3.2 Gleichstrommaschine mit Propeller Seite 34 Hinweis: Verwenden Sie als Abtastzeit Ta = 10ms. Weiterhin sei erwähnt, dass in Matlab folgende Prozeduren für die Transformationen zwischen s-, z- und q-Bereich zur Verfügung stehen: T G (s) →a G (z) G (z) → G# (q) T G# (q) →a G (z) Matlab-Befehl: Matlab-Befehl: Gz=c2d(Gs,Ta,’zoh’) Gq=d2c(Gz,’tustin’) Matlab-Befehl: Gz=c2d(Gq,Ta,’tustin’) Aufgabe 3.8 (Verifikation). Testen Sie sowohl am linearisierten Modell (3.10) als auch am vollständigen Modell (3.8) aus Aufgabe 3.4 durch Simulation in Simulink, ob der so entworfene Regelkreis die Spezifikationen auch tatsächlich erfüllt. Laborübung Regelungstechnik (WS 2011/2012) © Institut für Automatisierungs- und Regelungstechnik, TU Wien 3.3 Literatur Seite 35 3.3 Literatur [3.1] P. Kokotovic, H. K. Khalil und J. O’Reilly, Singular Pertubation Methods in Control: Analysis and Design. USA, Philadelphia: Society for Industrial Mathematics, 1999. [3.2] A. Kugi, Skriptum zur VU Automatisierung (WS 2011/2012), <http://www.acin.tuwien.ac.at/?id=42>, Institut für Automatisierungs- und Regelungstechnik, TU Wien, 2011. Laborübung Regelungstechnik (WS 2011/2012) © Institut für Automatisierungs- und Regelungstechnik, TU Wien


![Verbrauch [in l/h] 6 Knoten Propeller X 2.20 Propeller Y 2.00](http://s1.studylibde.com/store/data/008663635_2-4ae10991c1500b55171730d1b67b298a-300x300.png)