3. Antriebe mit Gleichstrommaschine
Werbung

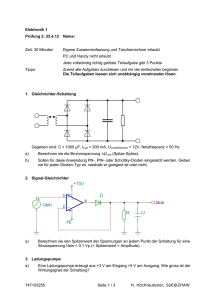
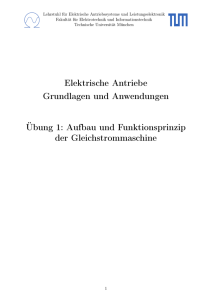
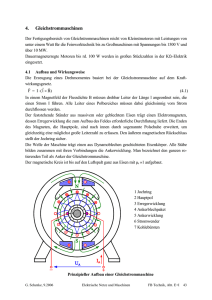
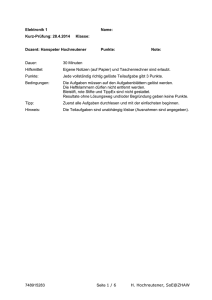
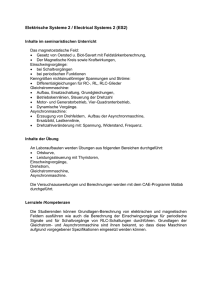
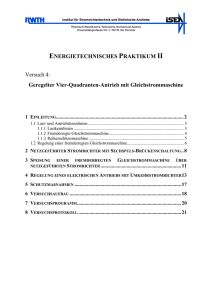
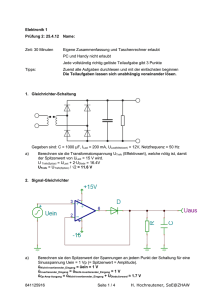
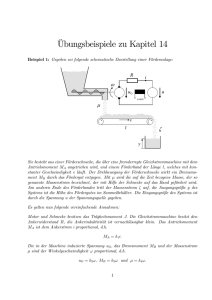
EL4 Grundlagen Antriebstechnik 3. Antriebe mit Gleichstrommaschine Inhalt 3. Antriebe mit Gleichstrommaschine ........................................................................................ 2 3.1 Einleitung............................................................................................................................... 2 3.2 Permanenterregte Gleichstrommaschine ........................................................................... 3 3.2.1 Aufbau .............................................................................................................................. 3 3.2.2 Wirkungsweise Motorbetrieb ........................................................................................... 3 3.2.3 Ersatzschaltung ................................................................................................................ 6 3.2.4 Leistungsfluss................................................................................................................... 6 3.2.5 Betriebskennlinien für Ankerstellbereich ........................................................................ 7 3.2.6 Betriebskennlinien in 4 Quadranten ................................................................................. 8 3.3 Weitere Arten von Gleichstrommaschinen ........................................................................ 9 3.3.1 Innenliegende Permanentmagnete ................................................................................... 9 3.3.2 Erregung mit Feldwicklung ........................................................................................... 10 3.4 Stromrichter ........................................................................................................................ 12 3.4.1 Einführung ..................................................................................................................... 12 3.4.2 Leistungselektronische Schalter ..................................................................................... 13 3.4.3 Schaltvorgang in der Leistungselektronik...................................................................... 15 3.4.4 Ansteuerung von Schalter .............................................................................................. 18 3.5 Gleichstromsteller ............................................................................................................... 19 3.5.1 Tiefsetzsteller als 1 Quadranten-Steller ......................................................................... 19 3.5.2 Steuerverfahren .............................................................................................................. 20 3.5.3 Prinzip und Funktion des 2 Quadranten-Stellers ........................................................... 21 3.5.4 Ausbau auf 4 Quadranten............................................................................................... 22 3.6 Literaturverzeichnis ........................................................................................................... 23 Februar 2017 Alberto Colotti, Werner Sieber ZHAW / SoE Grundlagen Antriebstechnik 3. Antriebe mit Gleichstrommaschine 3.1 Einleitung 3. Antriebe mit Gleichstrommaschine 3.1 Einleitung Gleichstrommaschinen waren die ersten elektromechanischen Energiewandler. Sie wurden im 19. Jh. entwickelt und als Generatoren und Motoren eingesetzt. Ihr Anlaufverhalten und ihre Regelbarkeit sind sehr gut, was zu ihrer raschen Verbreitung führte. Abbildung 3-1 Gleichstrommaschinen, 4-polig, verschiedene Generationen Bei grösseren Leistungen sind sie heute von den Drehstrommaschinen (Synchron- und Asynchronmaschine) verdrängt. Nur bei langlebigen Anlagen (Eisenbahn, Tram) und hochdynamischen Antrieben (Werkzeugmaschinen, Papiermaschinen) trifft man sie noch an. Im Kleinleistungsbereich (< 250 W) sind die Gleichstromantriebe weiterhin verbreitet, weil sie am einfachsten und billigsten sind: Türantriebe, Foto-, Filmkamera (Objektiveinstellung), Auto (Scheibenwischer, Ventilator, Fensterheber), Spielzeuge (Auto, Eisenbahn). 3 4 2 5 Legende: 1 Trafo 2 Stromrichter 3 Gleichstrommotor 4 Winkelgetriebe 5 Zahnrad mit Kette 1 Abbildung 3-2 automatische Schiebetüre (www.tormax.com, www.dorma.com) Früher wurden Drehzahl und Drehmoment mit Widerständen verstellt (schlechter Wirkungsgrad). Heute werden dazu Stromrichter eingesetzt. Das sind elektronische Geräte, die durch schnelles Schalten den elektrischen Leistungsfluss mit hohem Wirkungsgrad steuern oder regeln. In der abgewandelten Form des Universalmotors können Gleichstrommaschinen auch mit Wechselstrom betrieben werden und sind in vielen Haushaltgeräten enthalten: Fön, Staubsauger, Küchenmaschinen, Bohrmaschine. 3-2 ZHAW / SoE Grundlagen Antriebstechnik 3. Antriebe mit Gleichstrommaschine 3.2 Permanenterregte Gleichstrommaschine 3.2 Permanenterregte Gleichstrommaschine 3.2.1 Aufbau Eine Gleichstrommaschine besteht aus Stator (Ständer) und Rotor (Läufer). Der Stator trägt die Permanentmagnete (Dauermagnete). Sie bilden zusammen mit dem Gehäuse (Eisen), den Luftspalten und dem Rotor (Eisen) einen magnetischen Kreis. Abbildung 3-3 Gleichstrommaschine mit Permanentmagnet-Erregung (© maxon motors) Der Rotor trägt die Ankerwicklung. Sie besteht aus einzelnen Windungen, die den Rotor in Längsrichtung umfassen. Anfang und Ende Windung liegen nebeneinander auf dem Kommutator (Stromwender, Kollektor) und sind gegeneinander isoliert. Ankerwicklung in Nuten eingelegt Rotorblechpaket Kollektor mit isolierten Lamellen Abbildung 3-4 Rotor mit Ankerwicklung Das Ende einer Windung ist auch der Anfang der nächsten Windung. So entsteht eine Serieschaltung der Windungen. Die rotierende Ankerwicklung ist über feststehende Kohlebürsten mit den Anschlussklemmen verbunden. 3.2.2 Wirkungsweise Motorbetrieb Die Permanentmagnete erzeugen im magnetischen Kreis einen konstanten magnetischen Fluss Φ. Die Ankerwicklung (Index A) wird eingeschaltet. Zuerst wird eine kleine Ankerspannung UA eingestellt. Es fliesst der Strom IA durch die Ankerwindungen. Auf die einzelnen Leiter wirkt die Lorentzkraft FL. Dadurch entsteht das Drehmoment Mi auf den Rotor. Es beschleunigt den Rotor auf die mechanische WinkelgeschwindigkeitΩ, bzw. die Drehzahl n. 3-3 ZHAW / SoE Grundlagen Antriebstechnik 3. Antriebe mit Gleichstrommaschine 3.2 Permanenterregte Gleichstrommaschine N S Abbildung 3-5 Ströme in der Ankerwicklung, Kraft auf Leiter (zu vervollständigen) Lorentzkraft auf einen Leiter FL =I ⋅ l×B (3-1) Ψ A = kΦ wicklung (3-2) ( ) verketteter Fluss der Anker(Maschinenkonstante) M i = kΦ ⋅ I A inneres Moment Ω= 2π ⋅ f mech= 2π ⋅ n ⋅ min 60 s (3-3) mechanische Winkelge- (3-4) schwindigkeit Das Drehmoment bleibt nur bestehen, wenn die Stromrichtungen in den Leitern an den Polen immer gleich sind. Dafür sorgt der Kommutator (Stromwender, Kollektor) zusammen mit den Kohlebürsten. Dreht eine Windung durch die horizontale Lage, schliessen die Kohlebürsten Anfang und Ende der Windung kurz. Anschliessend fliesst der Strom in die umgekehrte Richtung. N A1 iA (t) A2 t=0 S t=T/4 iLeiter (t) t=T/2 Abbildung 3-6 Stromwendung bei Ankerwicklung mit nur 1 Windung, Darstellung einer halben Umdrehung . A1, A2 Anschlüsse der Ankerwicklung Beim Drehen ändert der von der Ankerwindung umfasste magnetische Fluss Φ(t). Dadurch wird in der Ankerwindung die Spannung ui(t) induziert. ui (t ) = d Φ (t ) dt induzierte Spannung einer Windung 3-4 (3-5) ZHAW / SoE Grundlagen Antriebstechnik ohne Kommutator 3. Antriebe mit Gleichstrommaschine 3.2 Permanenterregte Gleichstrommaschine Φ(t), ui(t) t T/2 mit Kommutator T Φ(t), ui(t) t T/2 Abbildung 3-7 T induzierte Spannung einer Ankerwindung (zu vervollständigen) Die Serieschaltung der Ankerwindungen vergrössert und glättet die induzierte Spannung Ui. Sie kann bei abgeschalteter Ankerwicklung gemessen werden (Auslaufen des Motors). + - Abbildung 3-8 ebene Darstellung Ankerwicklung mit Stromfluss, 4-polig (Fischer, 16. Auflage: 2013) Ui = k ⋅ Φ ⋅ Ω induzierte Spannung in der Ankerwicklung (3-6) Je schneller die Maschine dreht, umso grösser wird die induzierte Spannung Ui. Sie wirkt der Ankerspannung UA entgegen (Lenz’sche Regel). Dadurch verringert sich der Ankerstrom IA, die Beschleunigung nimmt ab und ein stationärer Zustand stellt sich ein. 3-5 ZHAW / SoE Grundlagen Antriebstechnik 3. Antriebe mit Gleichstrommaschine 3.2 Permanenterregte Gleichstrommaschine 3.2.3 Ersatzschaltung U N, PN IA INA ~ M UA = Erregung AnkerStromrichter Abbildung 3-9 Ω Anker Welle Blockschema Gleichstromantrieb mit AC-Speisung Der Stromrichter (bzw. Netzgerät) wird durch die Spannungsquelle UA ersetzt. Die Ankerwicklung wird als reale Spulen behandelt. Wegen dem Gleichstrom entsteht keine selbstinduzierte Spannung an der Induktivität LA. Im Widerstand RA entstehen die elektrischen Verluste. Die fremdinduzierte Spannung in der Ankerwicklung entspricht der Spannungsquelle Ui. Die Reibungsverluste werden mit dem Verlustmoment MV berücksichtigt. IA RA PVmech LA MV Mi PA UA M Pi Pmech Ω Ui Abbildung 3-10 Ersatzschaltung Gleichstrommaschine zusätzliche Gleichungen aus Ersatzschaltung: U A = U i + RA ⋅ I A Ankerspannung (3-7) = M i − MV M Moment (3-8) P= P= UA ⋅ IA el A elektrische Leistung (3-9) PVel = PVA = RA ⋅ I A2 elektrische Verluste (3-10) P= U i ⋅ I A= M i ⋅ Ω i innere Leistung (3-11) PVmech = MV ⋅ Ω mechanische Verluste (3-12) Pmech= M ⋅ Ω mechanische Leistung (3-13) 3.2.4 Leistungsfluss Leistungsgleichungen: 3-6 ZHAW / SoE Grundlagen Antriebstechnik Abbildung 3-11 3. Antriebe mit Gleichstrommaschine 3.2 Permanenterregte Gleichstrommaschine Leistungsflüsse, links: Motorbetrieb; rechts: Generatorbetrieb Im Motorbetrieb wird die Maschine elektrisch gespeist und gibt mechanische Leistung ab. Alle Leistungen sind positiv. Bedingungen für Motorbetrieb: ; U A > Ui M i > MV (3-14) Im Generatorbetrieb wird die Maschine mechanisch angetrieben und gibt elektrische Leistung am Anker ab. Die Gleichungen gelten weiterhin. Die Leistungen Pmech, Pi und PA werden negativ. Bei positivem Fluss Φ ist entweder das Moment Mi negativ, dann wird auch der Ankerstrom IA negativ. Oder die Winkelgeschwindigkeit Ω ist negativ, dann wird auch die induzierte Spannung Ui negativ. Bedingungen für Generatorbetrieb: U ; A < Ui MV < M (3-15) 3.2.5 Betriebskennlinien für Ankerstellbereich Im Betrieb interessiert das Drehzahlverhalten bei Belastung: Ω = f(M) bzw. n = f(M). Die Kombination der Gleichungen (3-3), (3-6), (3-7), (3-8) ergibt folgende Gleichung für die Kennlinie Ω = f(M, kΦ, UA): U RA ⋅ M V UA RA RA A − + = − ⋅ + − M M M ( ) V k Φ ( k Φ )2 k Φ ( k Φ )2 ( k Φ )2 Berücksichtigt man die Gleichung (3-4), erhält man die Drehzahl-Drehmoment-Kennlinie n = f(M, kΦ, UA). Ω= (3-16) U RA ⋅ M V 60 s RA A ⋅ ⋅ + − n = − M (3-17) k Φ ( k Φ )2 2π ⋅ min ( k Φ )2 Bei konstanten Werten für Ankerspannung UA, FlussΦ, Verlustmoment MV, Ankerwiderstand RA entsteht eine Geradengleichung. Die Steigung a ist negativ. Der n-Achsenabschnitt b entspricht der Leerlaufdrehzahl n0. n =a ⋅ M + b (3-18) Wird die Ankerspannung UA bis auf die Nennspannung erhöht, verschiebt sich die Kennlinie parallel zu höheren Drehzahlen. Das maximale Drehmoment Mmax steht ab einer gewissen Ankerspannung zur Verfügung. Dieser Kennlinienbereich heisst Ankerstellbereich. 3-7 ZHAW / SoE Grundlagen Antriebstechnik 3. Antriebe mit Gleichstrommaschine 3.2 Permanenterregte Gleichstrommaschine n / (1/min) nNenn UA Nenn UA1 MNenn Mmax M / Nm UA3 Abbildung 3-12 UA2 Betriebskennlinien n = f(M) mit UA als Parameter; 1. Quadrant 3.2.6 Betriebskennlinien in 4 Quadranten Die Gleichstrommaschine kann in allen 4 Quadranten betrieben werden. Q2 Q1 Legende: Q1 vorwärts antreiben Q2 vorwärts bremsen Q3 rückwärts antreiben Q4 rückwärts bremsen Ankerstellbereich o Nennpunkt Q3 Abbildung 3-13 Q4 Betriebskennlinien n = f(M) mit UA als Parameter; 4 Quadranten Bei anderen Maschinenarten wird die Betriebskennlinie als Funktion der Drehzahl dargestellt, M = f(n). Um die Gleichstrommaschine damit vergleichen zu können, wird auch die Umkehrfunktion zur Kennliniengleichung (3-16) berechnet. 2π ⋅ ( k Φ ) min k Φ ⋅ U A M =− ⋅n⋅ + − MV RA RA 60 s 2 3-8 (3-19) ZHAW / SoE Grundlagen Antriebstechnik 3. Antriebe mit Gleichstrommaschine 3.3 Weitere Arten von Gleichstrommaschinen Q2 Q1 Legende: Q1 vorwärts antreiben Q2 rückwärts bremsen Q3 rückwärts antreiben Q4 vorwärts bremsen Ankerstellbereich o Nennpunkt Q3 Abbildung 3-14 Q4 Betriebskennlinien M = f(n) mit UA als Parameter; 4 Quadranten 3.3 Weitere Arten von Gleichstrommaschinen 3.3.1 Innenliegende Permanentmagnete Um die Maschine zu verkleinern, können die Permanentmagnete auf dem Stator auch innenliegend angebracht werden. Der magnetische Kreis ist auch in diesem Fall über das Gehäuse geschlossen. Der Rotor ist dann hohl. die Ankerwicklung hat die Form einer Glocke, sog. Glockenanker. Abbildung 3-15 Gleichstrommaschine mit innenliegenden Dauermagneten (© maxon motors) 3-9 ZHAW / SoE Grundlagen Antriebstechnik 3. Antriebe mit Gleichstrommaschine 3.3 Weitere Arten von Gleichstrommaschinen 3.3.2 Erregung mit Feldwicklung Abbildung 3-16 Aufbau fremd- und permanenterregte Gleichstrommaschine Anstatt mit einem Permanentmagnet wird die Gleichstrommaschine mit einer Feldwicklung erregt. Die Erregung kann mit einem Feldstromrichter stufenlos eingestellt werden. Die Gleichstrommaschine wird als fremderregt bezeichnet. Wegen den Verlusten in der Feldwicklung sinkt der Wirkungsgrad. UN, PN IA INA ~ = 3 AnkerStromrichter INE MM UA ΩM IE UE = ~ FeldStromrichter 3 Abbildung 3-17 Blockschema fremderregte Gleichstrommaschine mit AC-Speisung Durch Feldschwächung wird ein zusätzlicher Arbeitsbereich gewonnen, der Feldstellbereich: Die Drehzahl steigt und das maximal mögliche Moment verringert sich. 3-10 ZHAW / SoE Grundlagen Antriebstechnik 3. Antriebe mit Gleichstrommaschine 3.3 Weitere Arten von Gleichstrommaschinen Q2 Legende: Q1 vorwärts antreiben Q2 rückwärts bremsen Q3 rückwärts antreiben Q4 vorwärts bremsen Q1 Ankerstellbereich Feldstellbereich o Nennpunkt Q3 Q4 Betriebskennlinien M = f(n) mit UA bzw. Φ als Parameter; 4 Quadranten Abbildung 3-18 konstantes Drehmoment IAN MN, φΝ IA(n) konstante Leistung UAN UiN PN UA(n) Ui(n) P(n) M(n), φ (n) neck IAN ⋅ RA Spannungs- od. Ankerstellbereich Abbildung 3-19 n Feldstellbereich Betriebsgrössen in Funktion der Drehzahl bei Ankernennstrom Übersicht Schaltungsarten mit Feldwicklungen: IA IE I IA IA IE IA IE1 IE2 IE2 a) Abbildung 3-20 b) c) IE1 d) Schaltungsarten mit Feldwicklungen a) fremderregte Gleichstrommaschine: Die Erregung ist steuerbar, unabhängig vom Anker. b) Hauptschluss- bzw. Reihenschlussmaschinen haben eine Serie-Erregung. Die Erregung ist abhängig vom Ankerstrom. Die Erregerwicklung ist niederohmig. c) Nebenschlussmaschinen haben eine Parallel-Erregung. Die Erregung ist abhängig von der Ankerspannung. Die Erregerwicklung ist hochohmig. d) Doppelschlussmaschine haben eine gemischte Erregung (Serie- und Parallel-Erregung oder Fremd- und Serie-Erregung). 3-11 ZHAW / SoE Grundlagen Antriebstechnik 3. Antriebe mit Gleichstrommaschine 3.4 Stromrichter 3.4 Stromrichter 3.4.1 Einführung Stromrichter (SR) können den elektrischen Leistungsfluss zwischen Quelle und Last mit hohem Wirkungsgrad steuern oder regeln. Sie beinhalten einen Leistungsteil (LT) und einen Steuerteil (ST) (siehe Abbildung 3-21). Der Leistungsteil besteht aus Halbleiter-Schaltern und Energiespeichern, die als Filter wirken. Der Steuerteil besteht aus einem Rechner mit Ein- und Ausgabe. Der Rechner berechnet aus den Soll- und Istwerten die Ein- und Ausschaltbefehle und sendet sie an die HalbleiterSchalter. Steuerteil Leistungsteil Leistungselektronik / Stromrichter Energieform 1, (Netz 1) u1, i1, f1, ϕ1 Steuerung, Regelung Abbildung 3-21 Energieform 2, (Netz 2, Antrieb) u2, i2, f2, ϕ2 Ansicht (www.siemens.com) und Blockschema Stromrichter Abbildung 3-22 Umformungspfade der Leistungselektronik (Colotti, et al., 2015) In der Antriebstechnik werden verschiedene Funktionen und Umformungen aus der Leistungselektronik verwendet (Abbildung 3-22). Ein Stromrichter, der eine feste Gleichspannung in eine andere, stufenlos einstellbare Gleichspannung umwandelt, heisst Gleichstromsteller (GSS). Um eine permanenterregte Gleichstrommaschine drehzahlvariabel zu betreiben, wird ein Gleichstromsteller für den Anker benötigt. 3-12 ZHAW / SoE Grundlagen Antriebstechnik UN, PN 3. Antriebe mit Gleichstrommaschine 3.4 Stromrichter IA INA = MM UA = Erregung AnkerStromrichter Abbildung 3-23 ΩM Anker Welle Blockschema Gleichstromantrieb mit DC-Speisung In einem Gleichstromsteller muss Gleichstrom ein und ausgeschaltet werden können. Dazu werden abschaltbare Halbleiterelemente benötigt. 3.4.2 Leistungselektronische Schalter Elektronische Schalter sind die Schlüsselkomponenten von Stromrichtern. Sie basieren heute vorwiegend auf dem Halbleitermaterial Silizium (Si). Eine zunehmende Bedeutung erhalten Halbleiterelemente aus Siliziumkarbid (SiC). Es werden Elemente mit den folgenden drei Grundfunktionen eingesetzt: • Dioden, die in Vorwärtsrichtung leiten und in Rückwärtsrichtung sperren. • Thyristoren, die sich in Vorwärtsrichtung über die Ansteuerung einschalten lassen („zünden“). Sie schalten aus, wenn der Strom Null wird und sperren in Rückwärtsrichtung. • Transistoren, wie MOSFET und IGBT, die sich in Vorwärtsrichtung über die Ansteuerung einund ausschalten lassen und in Rückwärtsrichtung schon bei kleinen Spannungen leiten. Das Leiten in Rückwärtsrichtung wird zum Teil mit zusätzlichen Dioden gewährleistet. Schaltelemente nicht steuerbar steuerbar nur einschalten Thyristor Triac Dioden Abbildung 3-24 Element Triac MOSFET IGBT GTO/ IGCT Thyristor Tabelle 3-1 ein- und ausschalten GTO / IGCT IGBT MOSFET Schaltelemente der Leistungselektronik nach Funktion gegliedert. Leistungs-bereich bis Schalt-frequenz bis 10 kVA …100 Hz 10 kVA …1 MHz 10 MVA …100 kHz 100 MVA …1 kHz Anwendung Bohrmaschine, Waschmaschine, Lichtregler etc. Kleinantriebe, Schaltnetzteile Antriebe, HGÜ-light Antriebe, Netzkupplung 1000 MVA …100 Hz HGÜ, Sanftanlauf Leistungshalbleiter, Grenzdaten und Einsatzbereiche 3-13 ZHAW / SoE Grundlagen Antriebstechnik 3. Antriebe mit Gleichstrommaschine 3.4 Stromrichter Dioden sind vom Aufbau her die einfachsten Leistungshalbleiter. Sie bestehen aus einem pn-Übergang und leiten oder sperren ohne weitere äussere Massnahme je nach der Richtung der angelegten Spannung. Im Sperrbetrieb sind die Verluste meist vernachlässigbar. In Durchlassrichtung treten grössere Verluste auf. iA iA a) iA c) b) iA d) iF,n UF trr ts tf t UF A rd ideale Diode K di/dt -ûAK uAK 0.2IRRM dir /dt Sperren uF,n uAK IRRM Leiten URM uAK ‘real’ Abbildung 3-25 a) Symbol, b) Ersatzschaltbild, c) Kennlinie und d) Schaltvorgang der Diode In der Abbildung 3-25 ist rechts der dynamische Schaltvorgang der Diode dargestellt: • Der Schaltvorgang wird durch eine von aussen verursachte Reduktion des Stromes eingeleitet. Die Steilheit di/dt in dieser Phase wird nicht durch die Diode bestimmt, sondern von der äusseren Schaltung. • Nach dem Nulldurchgang des Stromes verschwindet die Spannung uAK. Der Strom klingt aber weiter ab und wird negativ. • Nach der Zeit tS (Speicherzeit) ist die Raumladungszone ausgeräumt und die Diode beginnt eine negative Spannung aufzubauen. Der Strom erreicht hier sein negatives Maximum IRRM. • Die ausgeräumte Diode kann den Strom nicht länger weiter führen, er reisst mit einer hohen Steilheit dir/dt ab. Diese Stromänderung verursacht in den Induktivitäten des Zweigs hohe Spannungen bis zum Maximalwert URM. Nach tf ist die Sperrfähigkeit wieder hergestellt. • Man spricht von weichen (soft) Dioden, wenn deren Ausschalten relativ langsam erfolgt. Eine weiche Diode verursacht weniger Überspannungen und abrupte Stromveränderungen, dafür benötigt sie eine längere Schaltzeit und verursacht höhere Verluste. Dioden sind sehr wichtige Elemente der Leistungselektronik. Sie werden mit Nennspannungen von wenigen V bis einigen kV gebaut. Die Schottky Dioden sind unipolare Dioden und weisen daher keinen Ausräumeffekt auf. Da die Sperrschichtkapazität zur Aufnahme einer negativen Spannung aber geladen werden muss, fliesst auch hier ein negativer Strom vor dem Sperrzustand. Si Schottky Dioden sind auf etwa 100 V begrenzt. Mit SiC sind Dioden bis 1700 V verfügbar. Transistoren sind vollständig steuerbare Halbleiter, sie haben die grosse Bedeutung der Leistungselektronik in der modernen Technik erst möglich gemacht. Das gemeinsame Merkmal von GTO/IGCT, IGBT und MOSFET liegt in der Steuerung des Leitzustandes durch eine angelegte Spannung. Die Steuerung erfolgt im statischen Zustand leistungslos. Das Umschalten ist mit einem Ladungstransport von oder auf den Steuereingang verbunden und benötigt daher eine Schaltleistung. uDS S MOSFET iC C G uCE E IGBT c) d) iA A uAK G iG iC iC,n K GTO / IGCT IGBT G b) ‘Ein -Aus’ uF,n e iD D Diod a) uF,n ûCE uCE iD,n ‘realer IGBT’ Abbildung 3-26 Selbstgeführte Halbleiter und Kennlinie eines realen IGBT 3-14 ZHAW / SoE Grundlagen Antriebstechnik 3. Antriebe mit Gleichstrommaschine 3.4 Stromrichter Die Funktion eines Transistors wird in den Kennlinien dargestellt. In der Abbildung 3-27 sind drei wichtige Eigenschaften dargestellt: • Im Ausgangskennlinienfeld wird sichtbar, wie sich der Transistor in Funktion der Ausgangsspannung mit der Steuerspannung als Parameter verhält. Im geschalteten Betrieb ist der Transistor nur während dem Übergang in der sogenannten aktiven Zone. Er ist sonst ausgeschaltet oder im linearen Betrieb. Um eine möglichst kleine Spannung zu erreichen ist eine genügend hohe Steuerspannung anzulegen. • In der Transferkennlinie wird das Verhalten am Übergang von der aktiven Zone in die ohmsche Zone gezeigt. Hier wird auch sichtbar, welche minimale Spannung angelegt werden muss, damit der Transistor zu leiten beginnt. Der IGBT und der MOSFET unterscheiden sich in dieser Hinsicht grundlegend. Während der MOSFET eine nahezu linear mit dem Strom ansteigende Kennlinie aufweist, die mit einem Durchlasswiderstand (Rds,on) modelliert werden kann, hat der IGBT eine fast konstante Durchlassspannung. Daher sind MOSFET bei kleinen Strömen und IGBT bei grossen Strömen tendenziell effizienter. • Das Gate-Ladungsdiagramm zeigt, wie der Steuereingang geladen werden muss, um eine bestimmte benötigte Steuerspannung zu erreichen. Typisch ist dabei die Zone mit einer konstanten Spannung, die durchfahren werden muss, um die Gate-Spannung weiter zu erhöhen. Dieses Niveau wird als Miller-Plateau bezeichnet und spielt für die Geschwindigkeit eines Transistors eine entscheidende Rolle. Abbildung 3-27 MOSFET IRFP150N: Ausgangskennlinenfeld, Transferkennlinie und GateLadungsdiagramm. 3.4.3 Schaltvorgang in der Leistungselektronik Ein idealer Schalter weist die Kennlinie gemäss der Abbildung 3-28 auf. Er zeichnet sich aus durch: • eine beliebige Belastbarkeit mit Spannung und Strom • keine Verluste, weder während der Schaltzeit noch wenn leitend und sperrend • keine Schaltverzögerungen und Schaltflanken • keine Leistung für den Schaltvorgang Im Gegensatz dazu haben reale Schalter einige Nichtidealitäten: • Die zulässigen Belastungen von Strom und Spannung sind begrenzt und müssen gemäss den Datenblättern bei der Auswahl beachtet werden. • Im leitenden Zustand treten Verluste auf (beim MOSFET durch den Durchlasswiderstand RDSon, und bei den Dioden und IGBT durch Widerstand und Durchlassspannung verursacht) • Im sperrenden Zustand sind die Halbleiterelemente nahezu ideal, d. h. die Leckströme sind praktisch vernachlässigbar • Die Schaltflanken sind begrenzt, dadurch entstehen auch Schaltverluste 3-15 ZHAW / SoE Grundlagen Antriebstechnik • 3. Antriebe mit Gleichstrommaschine 3.4 Stromrichter In den Schaltern treten Kapazitäten und Induktivitäten auf, die das dynamische Verhalten beeinflussen. iS iS s=1 S s iCS Schalter s Lσ1 CS iS uS uS LσC uS s=0 Diode u1 L D iD uD RL LσD C1 CL u2 ‘idealer Schalter’ Abbildung 3-28 Idealer Schalter mit antiparalleler ebenfalls idealer Diode und Einbettung in einer realen Umgebung Reale Schaltvorgänge hängen auch von der Umgebung ab, in der sie stattfinden. In der Schaltung in Abbildung 3-28 rechts sind parasitäre Induktivitäten Lσ und die Kapazität CS über dem Schalter eingetragen. • An Kapazitäten kann die Spannung nicht sprungartig ändern. Schnelle Spannungsflanken sind mit grossen Strömen verbunden. Schnelle Potentialänderungen am Punkt D erfordern einen hohen Strom gemäss iCS = CS ∙ duC/dt • In Induktivitäten kann der Strom nicht sprungartig ändern. Schnelle Stromänderungen sind mit grossen Spannungen verbunden. Schnelle Stromänderungen führen zu einer hohen Spannung gemäss uL = L ∙ diC/dt Für Zweige in denen schnelle Stromänderungen auftreten, dies ist in der Abbildung 3-28 der Pfad mit dem Schalter, ist daher ein induktivitätsarmer Aufbau nötig. Dies wird mit dem Layout der Leiterbahnen erreicht und, wie gezeigt, mit einem parallelen Kondensator, der sehr nah am Schalter schnell einen hohen Strom zur Verfügung stellen. Dadurch wird die viel grössere Induktivität, die zu einer weiter entfernten Quelle führt überbrückt. Die Auswirkung der parasitären Induktivitäten ist in der Abbildung 3-29 dargestellt. Links wird sichtbar, wie die Spannung über dem Schalter beim Ausschalten des Stromes überschwingt. Dabei wird die Spannung von der Kapazität des Schalters begrenzt. Das Überschwingen ist mit einem Stromfluss verbunden, der im Schalter und in der Diode sichtbar wird. 250 200 150 100 50 Überschwingen beim Abschalten wegen Induktivität in Zuleitung 0 200 100 0 40 30 30 20 20 10 iD / A iS / A Diode 300 u2 / V uS / V 400 Schalter 0 10 0 -10 -10 3 4 5 6 × 1e-5 -20 3 t/s Abbildung 3-29 Reverse Recovery 4 der Diode 5 6 × 1e-5 t/s Reale Schaltvorgänge Eine einfache Abschätzung des Überschwingens ist mit der Berechnung der Umlagerung der Energie in von der Induktivität in die Kapazität möglich. Es gilt in der Induktivität 3-16 ZHAW / SoE Grundlagen Antriebstechnik 3. Antriebe mit Gleichstrommaschine 3.4 Stromrichter 1 2 LiL (3-20) 2 und in der Kapazität 1 WC = CuC2 (3-21) 2 Bei einer kompletten Umlagerung der Energie von einer Induktivität in einen Kondensator gilt daher: WL = L (3-22) iL C Die Schwingungen, wie sie in der Abbildung 3-28 sichtbar sind, werden durch die parasitären LC Schwingkreise in den Schaltungen verursacht. Dabei treten die Induktivitäten als Selbstinduktivitäten der Leitungen oder als Koppelinduktivitäten zwischen parallel verlaufenden Leitungen auf. Die Kapazitäten werden durch die Sperrschichten in den elektronischen Bauelementen gebildet. Die Induktivitäten von Leiterbahnen liegen in der Grössenordnung von 20 bis über 200 nH/m. Die Drain-Source Kapazität eines 100 V MOSFET bei etwa 3 nF. Dies ergibt für eine Leiterlänge von 50 mm Beispielsweise eine Resonanzfrequenz von uC = 1 1 (3-23) = 9030MHz 2π LC Die Problematik von Schwingungseffekten in der Leistungselektronik liegt darin, dass grosse Schwingungen via leitungsgebundene oder feldgebundene Kopplungen zu fehlerhaften Schaltvorgängen und dadurch zu Fehlfunktionen oder zur Zerstörung von Bauelementen führen können. fR = Schaltverluste entstehen an einem Schalter, wenn gleichzeitig eine Spannung und ein Strom anliegen. Dies ist an einem idealen Schalter nicht möglich, da seine Kennlinie gemäss Abbildung 3-28 nie beide Grössen gleichzeitig zulässt. Bei realen Schaltern, die eine begrenzte Anstiegsgeschwindigkeit aufweisen, ist dies aber möglich. Am Beispiel des Schaltens eines Tiefsetzstellers ist dies in der Abbildung 3-30 dargestellt. iS, uS iS uS L uD u1 iD RL CL u2 i D, uD pS, pD Abbildung 3-30 Vereinfachte Spannungs-, Strom- und Leistungsverläufe bei den Schaltvorgängen (zu ergänzen). Wenn beim Einschalten während dem Stromanstieg die ganze Spannung und während dem Ausschalten während dem Spannungsanstieg der ganze Strom noch anliegen, so liegt das sogenannte „harte Schalten“ vor. Da zudem noch erhöhte Spannungs- und Strombeanspruchungen durch die Schaltvorgänge entstehen können, sind die Bauelemente dabei mit hohen Spannungen, Strömen und Verlustleistungen belastet. Mit sogenannten „Snubber“ Schaltungen werden die Belastungen an den Bauelementen reduziert. Eine weitergehende Entlastung wird mit „soft switching“-Verfahren (ZVS: 3-17 ZHAW / SoE Grundlagen Antriebstechnik 3. Antriebe mit Gleichstrommaschine 3.4 Stromrichter „zero voltage switch“, ZCS: „zero current switch“) oder mit Resonanzwandler erreicht. All diesen Schaltungen ist gemeinsam, dass mit externen Beschaltungen das Ein- und/oder Ausschalten bei gleichzeitiger Reduktion der jeweils anderen Grösse erreicht wird. Das besondere an den Resonanzwandlern liegt darin, dass an deren Ausgang Schwingungen erzeugt werden, deren Nulldurchgang für den Schaltvorgang genutzt wird. Die Schaltfrequenz ist dadurch von dem gewählten Resonanzkreis abhängig. realer Einschaltvorgang Überstrom wg. Ausräumstrom der iS Diode Ausschaltentlastung EinschaltRSn,A entlastung CSn,A RSn,E iS uS L uD U1 iD idealisiertes, hartes Schalten I2 realer Ausschaltvorgang Überspannung wg. Induktivitäten RL CL u2 «soft switching» (ZVS, ZCS) uS U1 Abbildung 3-31 „Snubber“ (Entlastungs-) Netzwerke am Tiefsetzsteller und Vergleich der Ortskurven von Strom und Spannung. 3.4.4 Ansteuerung von Schalter Der Steuerteil des Stromrichters erzeugt die Schaltbefehle für die Bauelemente. IGBT und FET werden über die Gate-Spannung gesteuert. Sie benötigen nur während den Schaltvorgängen einen kurzzeitigen Gate-Strom iR, um die in den Elementen vorhandenen parasitären Kapazitäten CGE und CCG in Abbildung 3-32 umzuladen. Der Verlauf der Eingangsspannung ist bei beiden Elementen identisch. Zum Ausschalten genügt es, beim MOSFET die Gate-Spannung auf null zu schalten (Speisespannung U2 = 0), während beim IGBT im ausgeschalteten Zustand bevorzugt eine negative Gate-Spannung (U2 < 0) angelegt wird, um die Spannungsfestigkeit zu erhöhen. Die Ansteuer- und Schutzlogik ist als integrierte Schaltung in vielen verschiedenen Ausführungen erhältlich. Sie enthält typischerweise folgende Funktionen: - Überwachung der Betriebsspannungen U1 und U2 des IC, damit die sichere Funktion der Schaltung gewährleistet ist. - Überwachung der minimalen Ein- und Ausschaltzeiten tEin, Min und tAus, Min. (Da beim Ein- und Ausschalten des Halbleiters Verluste und damit Erwärmung auftreten, sollte verhindert werden, dass die beiden Schaltvorgänge unmittelbar nacheinander auftreten.) - Überwachung des Stromes iC durch den Leistungshalbleiter (typischerweise in Form einer Messung des Spannungsabfalls uCE über dem Element, sog. DESAT Überwachung). - Blockieren von erneutem Einschalten nach einem Fehler für eine vorgegebene Zeitspanne Mit den beiden externen Widerständen RG1 und RG2 im Gate-Pfad kann die Ein- und Ausschaltgeschwindigkeit des Halbleiters einzeln dimensioniert werden. Viele Ansteuer-IC sind aber nur für einen einzigen Gate-Widerstand ausgelegt. 3-18 ZHAW / SoE Grundlagen Antriebstechnik Abbildung 3-32 3. Antriebe mit Gleichstrommaschine 3.5 Gleichstromsteller Ansteuerschaltung für IGBT (und, ohne negative Spannung für einen FET) Da die Leistungshalbleiter und ihre Ansteuerungen meistens auf einem anderen elektrischen Potential liegen als die restliche Elektronik, müssen die Speisung des Ansteuer-IC und das Einschaltsignal galvanisch getrennt auf die Ansteuerung gebracht werden. Dazu werden optische oder magnetische „Isolationen“ (Optokoppler, Lichtleiter, Transformatoren...) oder „level-shifter“ eingesetzt. Einzelne Ansteuer-IC enthalten selber schon eine galvanische Trennung von Steuerung zu Ausgang und generieren selber, z.B. über die „Bootstrap“-Methode eine Speisung die auf das Emitter resp. Source Potential bezogen ist. 3.5 Gleichstromsteller 3.5.1 Tiefsetzsteller als 1 Quadranten-Steller Der Gleichstromsteller besteht nur aus einem Halbleiterschalter T1 und einer Diode D1. Die Induktivität L wirkt als kurzfristiger Energiespeicher und glättet den Ausgangsstrom iL(t) und damit auch die Lastspannung uR(t). Der Gleichstromsteller wandelt die konstante Eingangsspannung U1 in eine variable Ausgangsspannung uR um, die kleiner als U1 ist. Er wird deshalb auch als Tiefsetzsteller bezeichnet. L id T1 iL iD Cd uD iC D1 CL u iR R uD uR U1 u1 uR iL ≈ IL TE DC-Quelle Steller Abbildung 3-33 Filter Last T ∆IL TE t T Prinzipschema Gleichstromsteller 1. Quadrant Es gilt: Tein D = a= T T Duty-cycle, control factor (engl.), Aussteuerungsgrad, Tastverhältnis, Übersetzungsfaktor (dt.) beim Tiefsetzsteller (Index T) 3-19 (3-24) ZHAW / SoE Grundlagen Antriebstechnik 3. Antriebe mit Gleichstrommaschine 3.5 Gleichstromsteller Tein 1 ⋅ u2 (t ) ⋅ dt Ausgangsspannung U2 = T ∫0 Glättungsdrossel L: Aus der Stromgleichung lässt sich der Spannungsmittelwert herleiten. iL (T= ) I 2min 1 T + ⋅ ∫ u L (t ) ⋅ dt = I 2 min L 0 (3-25) (3-26) 1 T ⋅ u L (t ) ⋅ dt = 0 (3-27) T ∫0 Die Glättungsinduktivität schluckt den grössten Teil der Welligkeit der Ausgangsspannung u2(t) und hat im stationären Betrieb den Mittelwert 0. Aus der Maschengleichung folgt dann die Lastspannung: UL = U R =U2 −U L =U2 Lastspannung (3-28) Eingangsstrom: 1 I1 = ⋅ T Tein ∫ i1 (t ) ⋅ dt = D ⋅ I 2 (3-29) 0 Um den Stromrippel ∆I2 des Ausgangsstroms näherungsweise zu berechnen, wird folgende Annahme getroffen: Die Lastspannung uR(t) ist vollkommen geglättet. Dann entspricht die Spulenspannung uL(t) gerade der Welligkeit der Ausgangsspannung u2(t). ∆I ∆I T1 ein : u L (t ) = U1 − U 2 = L 2 ; T1 aus : u L (t ) = −U 2 = −L 2 Tein Taus (3-30) U1 − U 2 U2 (3-31) ⋅ Tein = ⋅ Taus L L Wenn die Welligkeiten der Lastgrössen uR(t), i2(t) und die Verluste der Schaltung vernachlässigt werden, entstehen folgende Leistungsgleichungen: ∆ I 2 = I 2 max − I 2 min = P2 = PR ≈ U 2 ⋅ I 2 P1 = P2 η ≈ P2 ≈ U 2 ⋅ I 2 = D ⋅ U1 ⋅ I1 = U1 ⋅ I1 D Ausgangsleistung (3-32) Eingangsleistung (3-33) 3.5.2 Steuerverfahren Der Gleichstromsteller wird mit dem Aussteuerungsgrad D = Tein / T gesteuert oder mit einem SollIstwert-Vergleich geregelt. Es gibt 3 Steuerverfahren: - Pulsweiten-Steuerung: Tein variabel, T konstant. Die Schaltung arbeitet mit einer festen Schaltfrequenz f = 1/T. Dadurch bleibt die Glättung etwa gleichmässig über den Steuerbereich. Die Schaltfrequenz kann einfach gefiltert werden. Diese Variante wird häufig angewendet. - Pulsfolge-Steuerung: Tein konstant, T variabel. Die Schaltung arbeitet mit einer festen Einschaltdauer Tein. Die Glättung muss auf tiefe Schaltfrequenzen ausgelegt werden. Die Filterung der Schaltfrequenz ist aufwendiger. - 2-Punkt-Regelung: Tein variabel, T variabel. Die Schaltung arbeitet mit einem Toleranzband um den Sollwert. Wird der obere Rand des Toleranzbandes erreicht, wird ausgeschaltet, wird der untere Rand erreicht, wird eingeschaltet. Als Sollwert können UR oder I2 gewählt werden. 3-20 ZHAW / SoE Grundlagen Antriebstechnik 3. Antriebe mit Gleichstrommaschine 3.5 Gleichstromsteller 3.5.3 Prinzip und Funktion des 2 Quadranten-Stellers Der 2 Quadranten Steller besteht aus einem Brückenzweig mit den Transistoren T1 und T2 mit je einer Freilaufdiode. Der 2 Quadrantensteller kann im Gegensatz zum Tiefsetzsteller auch einen negativen Strom führen und daher die Leistungsrichtung von der Last in die Quelle umkehren, wenn die Last auch als Quelle arbeiten kann. Die Spannung u2 ist im Mittel positiv. Somit kann in zwei Quadranten gespeist werden. Anker i1(t) I1 D1 T1 i2(t) I2 = IA U1 uL(t) UL uR(t) UR LA RA u2(t) U2 = UA D2 Abbildung 3-34 Ui T2 Prinzipschema Gleichstromsteller 1. und 2. Quadrant. Stromflussrichtungen bei T2 ein (grün), bei T2 aus (rot) (zu ergänzen). Beim vorwärts Bremsen wird der Ankerstrom IA negativ. Die Bremsleistung muss vom Anker mit tiefer Spannung UA in die Quelle mit hoher Spannung U1 zurückgespeist werden können. Dazu dienen der Schalter T2 und die Diode D2. Dieser Teil der Schaltung entspricht einem Hochsetzsteller. u2(t), U2; i2(t), I2 2 1 0 -1 0 0.5 1 1.5 t/T 2 2.5 3 0 0.5 1 1.5 t/T 2 2.5 3 U1; i1(t), I1 2 1 0 -1 Abbildung 3-35 Bremsbetrieb 2. Quadrant (zu vervollständigen) Die in der Ankerwicklung induzierte Spannung Ui ist nun der Erzeuger. Zuerst muss der Energiespeicher LA geladen werden. Dazu wird der Schalter T2 kurzzeitig eingeschaltet. Der Anker ist nun kurzgeschlossen und es baut sich ein negativer Strom i2(t) auf. Dann wird der Schalter T2 kurzzeitig ausgeschaltet. Der Strom i2(t) fliesst weiter über die Diode D1 in die Quelle U1. Der Energiespeicher LA entlädt sich und speist so die Quelle U1, die nun der Verbraucher ist. Anschliessend beginnt der 3-21 ZHAW / SoE Grundlagen Antriebstechnik 3. Antriebe mit Gleichstrommaschine 3.5 Gleichstromsteller nächste Takt. Mit Hilfe des Energiespeichers LA kann so Energie von der Quelle Ui mit kleinerer Spannung in die Quelle U1 mit grösserer Spannung verschoben werden. a= H 1 U1 T T = = = U 2 Taus T − Tein 1 − D Übersetzungsfaktor beim Hochsetzsteller (3-34) 3.5.4 Ausbau auf 4 Quadranten Um in den Quadranten 3 und 4 zu arbeiten, benötigt die Schaltung noch die Schalter T3, T4 und die Dioden D3, D4. Nun ist es möglich eine negative Spannung an u2 zu erzeugen. Aufgrund ihrer Struktur wird diese Schaltung als H-Brücke bezeichnet. i1(t) I1 T1 D1 T3 i2(t) I2 LA RA D3 Ui U1 T2 Abbildung 3-36 D2 u2(t) U2 T4 D4 Prinzipschema Gleichstromsteller 4 Quadranten (H-Brücke) In der Tabelle 3-2 sind die möglichen Schaltzustände dargestellt. Zwei Zustände sind aktiv mit positiver oder negativer Spannung. Die zwei Zustände mit Spannung Null sind die Freilaufzustände. Die Stromrichtung kann in jedem Zustand positiv oder negativ sein. Schaltzustände T1/T2 Tabelle 3-2 T3/T4 Spannung u2 Stromfluss i2>0 i2<0 0/1 0/1 0 1/0 0/1 U1 0/1 1/0 -U1 1/0 1/0 0 Schaltzustände der H-Brücke und Pfade für positiver und negativer Strom (zu vervollständigen) Die H-Brücke kann im bipolaren oder im unipolaren Betrieb getaktet werden. In der Abbildung 3-37 ist die Schaltfolge und der Stromverlauf in den vier Quadranten für eine unipolare Taktung dargestellt. 3-22 ZHAW / SoE Grundlagen Antriebstechnik 3. Antriebe mit Gleichstrommaschine 3.6 Literaturverzeichnis U2, n T2 D4 D1 D4 T1 T4 D2 T4 I2, M T3 T2 D4 T2 T4 D2 Abbildung 3-37 D3 D2 H-Brücke: u2(t), i2(t) bei Betrieb in 4 Quadranten bei unipolarer Taktung U2 / n T1 T1 T3 i2 U1 i2 Last u2 T3 Last U1 u2 T4 T2 T4 T2 I2 / M T1 T1 T3 T3 i2 U1 i2 Last u2 U1 u2 T4 T4 T2 T2 Abbildung 3-38 Last Strompfade der 4 Quadranten im unipolaren Betrieb (zu vervollständigen) 3.6 Literaturverzeichnis Colotti, Alberto und Jenni, Felix. 2015. Elektrische Antriebe. Zürich : Faktor Verlag, 2015. 978-3905711-32-5. Fischer, Rolf. 15. Auflage: 2011. Elektrische Maschinen. München : Hanser, 15. Auflage: 2011. ISBN 3-446-42554-3. 3-23