The Distance Geometry of Music
Werbung

Rheinische Friedrich-Wilhelms-Universität Bonn
Institut für Informatik I
Alisa Kort
The Distance Geometry
of Music
25. Februar 2010
Seminararbeit im Wintersemester 2009/2010
Zusammenfassung
In dieser Ausarbeitung wollen wir die Beziehung zwischen dem klassischen euklidischen Algorithmus und vielen anderen Forschungsbereichen untersuchen, vor allem im Kontext mit Musik und Distanzgeometrie. Konkret schauen wir uns an, wie die Struktur des euklidischen
Algorithmuses eine Familie von Rhythmen definiert, die über vierzig
Ostinati aus der traditionellen Weltmusik umfasst. Schließlich, wollen
wir uns gründlich mit den mathematischen Eigenschaften von diesen
euklidischen Rhythmen beschäftigen.
Inhaltsverzeichnis
1 Einführung
2
2 Definitionen und Notation
2.1 Gleichmäßige Rhythmen . . . . . . . . . . . . . . . . . . . . . .
2.2 Tiefe Rhythmen . . . . . . . . . . . . . . . . . . . . . . . . . . .
2
4
6
3 Euklid und Gleichmäßigkeit in verschiedenen Disziplinen
7
3.1 Klassischer euklidischer Algorithmus . . . . . . . . . . . . . . .
7
3.2 Gleichmäßigkeit und das Timing-System in Neutronenbeschleuniger . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8
3.3 Euklidische Rhythmen . . . . . . . . . . . . . . . . . . . . . . . .
9
3.4 Digitale Geraden . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
3.5 Schaltjahresberechnung . . . . . . . . . . . . . . . . . . . . . . . 10
4 Einige mathematische Eigenschaften euklidischer Rhythmen
4.1 Definitionen und Notationen . . . . . . . . . . . . . . . . . . . .
4.2 Gleichmäßige Rhythmen . . . . . . . . . . . . . . . . . . . . . .
4.2.1 Algorithmen und deren Eigenschaften . . . . . . . . . .
4.2.2 Eindeutigkeit . . . . . . . . . . . . . . . . . . . . . . . . .
4.2.3 Maximale Gleichmäßigkeit . . . . . . . . . . . . . . . . .
12
12
13
13
17
20
5 Literaturempfehlung
22
1
1
Einführung
Die enge Verwandtschaft von Mathematik und Musik ist in den Zeiten digitaler Klangverarbeitung offenkundig, doch schon vor mehr als 2500 Jahren wusste der bekannte griechische Mathematiker Pythagoras von Samos
ein Lied davon zu singen, als er festgestellt hat, dass musikalische Töne in
mathematischen Verhältnissen ausgedrückt werden können. In dieser Ausarbeitung untersuchen wir verschiedene mathematische Eigenschaften von
musikalischen Rhythmen und Skalen, die auf irgendeiner Weise mit dem Algorithmus eines anderen bekannten griechischen Mathematiker Euklid von
Alexandria verbunden sind. Wir erläutern (im Abschnitt 2) mehrere mathematische Beziehungen zwischen musikalischen Rhythmen und Skalen, Arbeit des Euklids und anderen Forschungsbereichen, wie Kernphysik, Kalenderentwicklung, mathematische Folgen und Reihen und Informatik. Insbesondere definieren wir den Begriff Euklidischer Rhythmus, der von einem
zum klassischen Euklid-Algorithmus ähnlichen Algorithmus generiert wird.
In dem mehr technischen Teil der Ausarbeitung (Abschnitte 3-5) untersuchen wir die wichtigsten Eigenschaften von Rhythmen und Skalen, nämlich
Gleichmäßigkeit (evenness) und Tiefe (deepness), und zeigen wie diese zwei
Begriffe mit der Arbeit von Euklid verwandt sind.
2
Definitionen und Notation
In diesem Abschnitt definieren wir ein paar wichtige Begriffe.
Definition 1 Musikalischer Rhythmus ist eine in beide Richtungen unendliche binäre Sequenz. Jedes Bit repräsentiert eine Zeiteinheit des Taktes
(zum Beispiel die Länge einer Sechzehntelnote). 1 repräsentiert eine gespielte
Note oder Onset (zum Beispiel eine Sechszehntelnote), 0 repräsentiert Stille
(zum Beispiel eine Sechzehntel pause).
Definition 2 Musikalische Skala ist eine in beide Richtungen unendliche binäre Sequenz. Jedes Bit repräsentiert eine Tonhöhe (in einem logFrequenzbereich). 1 oder 0 zeigt, ob die Tonhöhe vorhanden ist oder nicht.
Die Zeitdimension von Rhythmen und die Tonhöhendimension von Skalen haben im Grunde eine zyklische Natur, sie sind zyklisch in jedem Takt
und in jeder Oktave. Wir werden in dieser Ausarbeitung nur solche zyklischen Rhythmen betrachten, die auch Timelines genannt werden. Weiterhin
werden wir unter dem Begriff Rhythmus eine Timeline meinen. Um die Einheitlichkeit der Terminologie zu behalten, spricht der Rest der Ausarbeitung
in erster Linie von Rhythmen, aber die Begriffe und Ergebnisse gelten in
gleicher Weise auch für Skalen.
2
Definition 3 Timeline ist ein zyklischer musikalischer Rhythmus. Die Darstellung als unendliche Bitsequenz ist eine Wiederholung eines n-Bit-Strings
entsprechend der Zeitspanne eines Taktes bzw. einem log-Frequenzbereich
einer Oktave. Um die Zyklizität richtig darzustellen, weisen wir jedes Bit
einem von n auf einem Kreis gleichmäßig verteilten Punkt.
Es gibt mehrere verschiedene grafische Darstellungen eines Rhythmuses. Wir werden vier davon benutzen. Die erste Repräsentation heißt Time
Unit Box System (TUBS). TUBS - oder auch Box-Notation genannt - ist
eine Sequenz von insgesamt n ’x’s und ’.’s, ’x’ steht für Onset und ’.’ symbolisiert eine Pause. Die zweite Repräsentation ist Clockwise Distance Sequence. Dies ist eine Sequenz von Integer-Zahlen, die sich zu n summieren
und die Länge der Intervalle zwischen aufeinander folgenden Onset-Paaren
repräsentiert. Wichtig ist, dass diese Darstellung fordert, dass der Rhythmus mit einem Onset anfängt, deshalb lassen sich nicht allen Rhythmen als
Clockwise Distance Sequence darstellen. Die dritte Repräsentation schreibt
Onsets als eine Teilmenge der Menge aller Takte nummeriert mit 0, 1,...,
n − 1, der Index rechts an der Teilmenge bezeichnet die Zeitspanne. Die
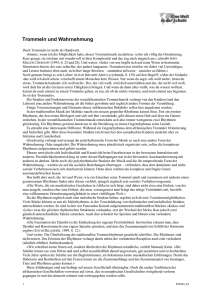
vierte und auch die letzte Repräsentation ist ein grafisches Uhr-Diagramm
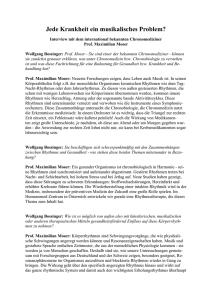
(Clock Diagram), in dem die 0-Markierung den Anfang des Rhythmuses bezeichnet und die Zeit im Uhrzeigersinn läuft. Als Beispiel betrachten wir
folgende Darstellungen der Son-Clave, eines bekannten kubanischen Rhythmuses: 1001001000101000 als binäre Sequenz, [× ⋅ ⋅ × ⋅ ⋅ × ⋅ ⋅ ⋅ × ⋅ × ⋅ ⋅] als
TUBS, (3, 3, 4, 2, 4) als Clockwise Distance Sequence und {0, 3, 6, 10, 12}16
in Teilmengenschreibweise. Abbildung 1 zeigt die Uhrdiagrammdarstellung
von Son-Clave. In den Uhrdiagrammen verbinden wir adjazente Onsets
Abbildung 1: Uhrdiagramm von Son-Clave.
mit Geraden und formen so ein Polygon. Wir sagen, dass zwei Rhythmen
verschieden sind, wenn deren 1-0-Sequenzen (in beliebiger Darstellung) verschieden sind. Wenn ein Rhythmus eine rotierte Version eines anderen ist,
3
sagen wir, dass diese zwei Rhythmen Instanzen derselben Kette (necklace)
sind. Eine Kette ist eine Sequenz von Distanzen zwischen den Onsets (im
Uhrzeigersinn).
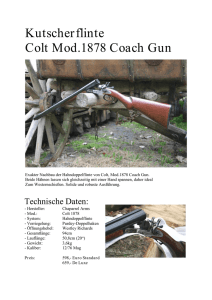
Abbildung 2: Diese zwei Rhythmen sind Instanzen derselben euklidischen
Kette..
2.1
Gleichmäßige Rhythmen
Betrachten wir folgende drei 12/8-Rhythmen in der Box-Notation:
[× ⋅ × ⋅ × ⋅ × ⋅ × ⋅ ×⋅], [× ⋅ × ⋅ × × ⋅ × ⋅ × ⋅×] und [× ⋅ ⋅ ⋅ × × ⋅ ⋅ × × ×⋅]. Der erste Rhythmus enthält Beats, die perfekt verteilt sind (well spaced). Solche Rhythmen
findet man überall auf der Welt, sie werden meistens in Tanzmusik integriert und sind leicht zu erkennen. Allerdings, sind solche einfachen Rhythmen für uns eher langweilig. Intuitiv ist es klar, dass der erste Rhythmus
gleichmäßiger ist, als der zweite, und der zweite ist gleichmäßiger als der dritte. Eigentlich ist der zweite Rhythmus eine bekannte afrikanische Timeline
Bembé. Traditionelle Rhythmen neigen dazu, eine gewisse Gleichmäßigkeit
aufzuweisen. Einerseits sind viele von denen Timelines (auch oft Claven genannt). Oft haben diese Claves eine Call and Response Struktur. Das Prinzip
dieser Struktur basiert auf dem Ruf (Call) eines Vorsängers und der darauf
folgenden Antwort (Response) des Chors. Dieses Prinzip wird auf Instrumentalmusik übertragen: der erste Teil der Clave stellt eine rhythmische
Frage, in der Regel durch das Aufbauen der rhythmischen Spannung, der
zweite Teil beantwortet diese Frage durch das Abbauen der Spannung. Als
Beispiel betrachten wir wieder die Son-Clave [× ⋅ ⋅ × ⋅ ⋅ × ⋅ ⋅ ⋅ × ⋅ × ⋅ ⋅]. Diese
Clave schafft Spannung durch Synkope, welche zwischen dem zweiten und
dem dritten aber auch zwischen dem dritten und dem vierten Onset stattfindet. Letztere ist eine schwächere Synkope, weil der betonte Taktschlag auf
4
der Position 8 zwischen dem dritten und dem vierten Onset liegt. (Betonte
Taktschläge eines 4/4 Metrums (Beats) treten an den Positionen 0, 4, 8 und
12 auf.) Die erste Synkope ist dagegen stark, weil der betonte Taktschlag
auf der Position 4 näher zum zweiten als zum dritten Onset ist. Andererseits
sind Rhythmen wie [× ⋅ × ⋅ × ⋅ × ⋅ × ⋅ ×⋅] bezüglich der Synkope weniger interessant. Tatsächlich sind am meisten interessante Rhythmen mit k Onsets
und der Zeitspanne n, wenn k und n relativ prim sind (haben also keinen
gemeinsamen Teiler größer als 1). Diese Eigenschaft ist natürlich“, weil es
”
einfacher ist rhythmische Kontradiktion zu erhalten, wenn die Onsets mit
den betonten Taktschlägen nicht übereinstimmen. Auch gibt es viele Claven, die ein Onset auf dem letzten betonten Taktschlag haben, wie das die
Son-Clave tut. Dies ist für die Call-and-Response Struktur üblich. Anderer
Fall ist die Bossa-Nova-Clave [× ⋅ ⋅ × ⋅ ⋅ × ⋅ ⋅ ⋅ × ⋅ ⋅ × ⋅⋅]. Diese Clave versucht das
Gefühl des Taktes zu brechen, und obwohl sie sehr gleichmäßig ist, produziert sie einen Zyklus, der wahrnehmend nicht mit dem Begis des Metrums
übereinstimmt. Weite Verbreitung von Gleichmäßigkeit in den Rhythmen
verschiedener Völker hat zu Forschung von mathematischen Messungen der
Gleichmäßigkeit im Bereich der mathematischen Musikethnologie geführt.
Diese Forschung könnte helfen kulturellen Präferenzen von Rhythmen in
der traditionellen Musik zu erkennen oder sogar zu erklären. Der Begriff
der maximal gleichmäßigen Mengen bezüglich Tonleitern und Rhythmen
auf einem Kreis dargestellt wurde von Clough and Douthett eingeführt.
Nach Block und Douthett, gingen Douthett und Entringer noch weiter und
haben bestimme mathematische Messungen der Höhe der Gleichmäßigkeit,
die in einem Rhythmus enthalten ist, konstruiert. Eine Möglichkeit ist die
geodätische Distanz zwischen allen Onset Paaren zu messen. Zum Beispiel
zwei 4-Onset Rhythmen [× ⋅ ⋅ ⋅ × ⋅ ⋅ ⋅ × ⋅ ⋅ ⋅ × ⋅ ⋅⋅] und [× ⋅ × ⋅ × ⋅ ⋅ × ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ ⋅⋅] haben
einen Gleichmäßigkeitswert von 32 und 23, was auch die intuitive Vermutung bestätigt, dass der erste Rhythmus gleichmäßiger als der zweite ist.
Allerdings ist geodätische Distanz als Gleichmäßigkeitsmaß viel zu grob und
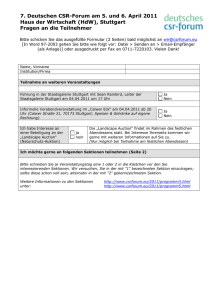
ungenau. Beispielsweise haben alle Rhythmen auf der Abbildung 2 denselben Gleichmäßigkeitswert von 48, aber intuitiv ist es klar, dass Bossa-Nova
mehr Gleichmäßigkeit aufweist, als Soukous oder Rumba. In dieser Ausarbeitung nehmen wir die Summe von allen euklidischen Distanzen zwischen
Punkten auf einem Kreis als Gleichmäßigkeitsmaß. 1956 hat Mathematiker
Fejes-Toth gezeigt, dass so eine Konfiguration von Punkten auf einem Kreis
diese Summe maximiert, wenn die Punkte Knoten eines einfachen Polygons sind. Dieser Gleichmäßigkeitsmaß ist anspruchsvoller als zum Beispiel
die geodätische Distanz. Nach diesem Maß werden die Rhythmen aus der
Abbildung 2 folgendermaßen angeordnet: Bossa-Nova als der gleichmäßigste
Rhythmus, danach folgen Son, Rumba, Shiko, Gahu und Soukous. Im Abschnitt 4 werden wir genau mathematische und rechnerische Aspekten der
Gleichmäßigkeitsmaximierung diskutieren.
5
Abbildung 3: Sechs fundamentale Afrikanische und Lateinamerikanische
Rhythmen. Alle haben dieselbe Summe von geodätischen Distanzen aller
Onset-Paaren..
2.2
Tiefe Rhythmen
Eine weitere wichtige Eigenschaft von Rhythmen ist Tiefe. Wir betrachten
wieder einen Rhythmus mit k Onsets und der Zeitspanne n, dargestellt eine
Menge von k Punkten auf einem Kreis der Kapazität n. Jetzt messen wir
geodätische Distanzen aller Paare von Punkten.
Definition 4 Musikalischer Rhythmus ist Winograd-tief, wenn jede Distanz 1, 2, ..., ⌊ n2 ⌋ nur ein mal vorkommt (Vielfachheit der Distanz). Es müssen
alle Distanzen vorhanden sein.
Der Rhythmus [× × × ⋅ ×⋅] ist Winograd-tief, weil Distanz 1 zwei mal, Distanz
2 drei mal und Distanz 3 ein mal vorkommen. Es gibt auch eine äquivalente
Definition von Winograd-Tiefe. Ein Rhythmus ist Winograd-tief, wenn die
Anzahl von gemeinsamen Onsets mit jedem zyklischen Shift des Rhythmuses
einmalig ist. Abbildung 3 zeigt einen Winograd-tiefen Rhythmus.
Definition 5 Musikalischer Rhythmus ist Erdös-tief, wenn er k Onsets hat
und es für jede Vielfachheit der Distanz 1, 2, ..., k−1 eine positive geodätische
Distanz gibt, definiert durch die Punkte auf einem Kreis mit genau dieser
Vielfachheit.
Wir machen uns den Unterschied zwischen Winograd-tief und Erdös-tief
klar. Um Winograd-tief zu sein, müssen alle Distanzen zwischen 1 und k − 1
6
Abbildung 4: Ein Erdös- und Winograd-tiefer Rhythmus. Die Vielfachheiten
von Distanzen sind der Reihe nach (von 1 bis 6) geordnet..
einmalig vorkommen. Um aber Erdös-tief zu sein, brauchen nur die Vielfachheiten den Distanzen, die vorkommen, einmalig zu sein. Im Abschnitt 5 charakterisieren wir alle Erdös-tiefe Rhythmen. Insbesondere beweisen wir, dass
alle tiefen Rhythmen (mit einer Ausnahme) generiert werden, das bedeutet,
dass der Rhythmus folgende Darstellung besitzt {0, m, 2m, ..., (k − 1)m}n für
eine ganze Zahl m, wo alle Berechnungen modulo n sind.
3
Euklid und Gleichmäßigkeit in verschiedenen Disziplinen
In diesem Abschnitt beschreiben wir den euklidischen Algorithmus zur Berechnung vom größten gemeinsamen Teiler. Danach erläutern wir im unerwarteten Kontext wie ein ähnlicher Algorithmus für die Maximierung der
Gleichmäßigkeit in binären Strings mit gegebener Anzahl von Nullen und
Einsen. Dieser Algorithmus beschreibt eine wichtige Familie von Rhythmen,
sogenannten Euklidischen Rhythmen, welche in der Weltmusik häufig vorkommen.
3.1
Klassischer euklidischer Algorithmus
Der euklidische Algorithmus für die Berechnung von dem größten gemeinsamen Teiler ist einer von den ältesten bekannten Algorithmen (circa 300
B.C.). Die Idee des Algorithmuses ist einfach: man subtrahiert die kleinere
vom der größeren Zahl so lange, bis man ein positives Ergebnis (größer als
7
Null!) bekommt. Das letzte mögliche Ergebnis ist auch der größte gemeinsame Teiler. Wir führen den Algorithmus für die Zahlen 5 und 13 aus: erst
13 − 5 = 8; dann 8 − 5 = 3; 5 − 3 = 2; 3 − 2 = 1; und schließlich 2 − 1 = 1. Also
ist 1 der größte gemeinsame Teiler von 5 und 13, mit anderen Worten sind
diese zwei Zahlen relativ prim.
Algorithmus 3.1 Euclid(k,n)
if a ≠ 0 then
return n
else
return Euclid(n mod k, k)
end if
Für k = 5 und n = 13 erhalten wir Euclid(5,13) = Euclid(3,5) =
Euclid(2,3) = Euclid(1,2) = Euclid(0,1) = 1.
3.2
Gleichmäßigkeit und das Timing-System in Neutronenbeschleuniger
Eine von den Hauptmotivation in der Musik ist das Maximieren der Gleichmäßigkeit.
Bjorklund war einem ähnlichen Problem der Maximierung der Gleichmäßigkeit
begegnet, aber in einem anderen Kontext, nämlich Bedingung von Komponenten wie Hochspannungs-Netzteile in den Spallations-Neutronenquellen,
die in der Kernphysik benutzt werden. In dieser Anlage kontrolliert ein
Timing-System eine bestimmte Anzahl von Toren (Gates). Das TimingSystem schickt Signale, die Tore aktivieren können. Das Ziel von Bjorklund
war, für gegebene n Zeitintervalle eine möglichst gleichmäßige Verteilung
von k < n Signalen zu erreichen. Bjorklund stellt das Problem als eine binäre
Sequenz von k Einsen und n − k Nullen, wo jedes Bit einen Zeitintervall repräsentiert, dabei werden die Zeitintervalle, wo das Signal gesendet wird,
mit 1 markiert. Somit wird das Problem der maximalen Gleichmäßigkeit
auf folgendes reduziert: Konstruktion einer binären Sequenz von n Bits mit
k Einsen so, dass die Einsen unter den n − k Nullen so gleichmäßig verteilt
werden, wie es geht. Ein simpler Fall ist, wenn n durch k ohne Rest teilbar
ist, dann müsste man die Einsen jedes n/k Bit platzieren. Dieser Fall entspricht der Situation, wenn n und k einen gemeinsamen Teiler k haben. Wir
beschreiben den Algorithmus von Bjorklund mit einem Beispiel. Gegeben
sind n = 13 und k = 5. Weil 13 − 5 = 8, starten wir mit einer Sequenz, die aus
5 Einsen gefolgt von 8 Nullen besteht:
[1] [1] [1] [1] [1] [0] [0] [0] [0] [0] [0] [0] [0]
Es gibt mehr als eine Null am Ende der Sequenz, deswegen fangen wir an
die Nullen auf Einsen zu verteilen:
8
[10] [10] [10] [10] [10] [0] [0] [0]
Wir machen mit den restlichen Nullen weiter:
[100] [100] [100] [10] [10]
Jetzt verteilen wir die [10]:
[10010] [10010] [100]
Wir sind an dem Punkt angekommen, wo wir nur drei Teilsequenzen haben.
An dieser Stelle könnten wir [100] auf [10010] [10010] verteilen, allerdings
ist die Sequenz zyklisch und es macht keinen Unterschied, ob [100] nun am
Ende oder in der Mitte steht. Uns bleibt es nur noch die Teilsequenz zusammen zu legen, das Ergebnis lautet:
[1001010010100]
Alternativ könnte man den Algorithmus in anderer Schreibweise ausführen.
Erst:
11111000 00000
Die drei Nullen, die in der ersten Zeile zu viel sind, schreiben wir drunter:
11111 00000 000
Und schließlich verteilen wir zwei letzte Spalten bis wir insgesamt nur drei
Spalten haben:
111 000 000 11 00
Als Ergebnis bekommen wie wieder die Sequenz
1001010010100
Der Algorithmus von Bjorklund hat dieselbe Struktur wie Euclid(k,n).
3.3
Euklidische Rhythmen
Den Algorithmus von Bjorklund kann man eine spezielle Visualisierung von
dem klassischen Euklidischen Algorithmus nennen. Die Sequenzen, die dadurch generiert werden, können wir als als eine Familie von Rhythmen, die
wir Euklidische Rhythmen nennen, auffassen. Wir schreiben so einen euklidischen Rhythmus als E(k, n), wo k die Anzahl von Onsets (also Einsen)
und die Länge der Sequenz ist. Als Beispiel betrachten wir die Sequenz
9
mit 3 Einsen und 5 Nullen [11100000], auf die wir den Bjorklund’s Algorithmus anwenden und folgenden euklidischen Rhythmus erhalten: E(3, 8)
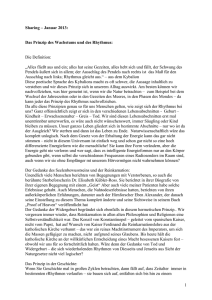
= [10010010]=[× ⋅ ⋅ × ⋅ ⋅ ×⋅]. Die Abbildung 4 zeigt das Uhrdiagramm dieses
Rhythmuses (die Zahlen sind die Abstände zwischen den Onsets entlang des
Kreisbogens). Der Rhythmus, den wir gerade aus Zwei Zahlen generiert haben, ist eigentlich einer von den berühmtesten Rhythmen der Welt. In Cuba
wird er Tresillo genannt, in USA Habanera.
Abbildung 5: (a) Euklidischer Rhythmus E(3, 8) ist kubanischer Tresillo.
(b) Euklidischer Rhythmus E(5, 8) ist kubanischer Cinquillo..
3.4
Digitale Geraden
Im Bereich Computergrafik wird der Euklidische Algorithmus für das Generieren gerader Linien verwendet. Hierbei werden (x, y)-Koordinaten der
Endpunkten, die eine gerade Linie definieren, in eine Sequenz von Pixel
umgewandelt, die eine digitale Annäherung der gegebenen Linie darstellen.
In der Abbildung 5 sehen wir Endpunkte p und q, die ein Liniensegment
definieren. Jetzt betrachten wie Distanzen, die entstehen, wenn man den
oberen bzw. den unteren Rand der Gerade (graue Pixel) von p nach q verfolgt: (33334) bzw. (43333). Wir stellen fest, dass die Sequenz für den oberen
Rand dem uns schon bekannten Rhythmus E(5, 16) (Bossa-Nova) entspricht.
Tatsächlich, haben Harris und Reingold in ihrer Arbeit Line drawing, leap
”
years, und Euclid“ gezeigt, dass der berühmte Bresenham Algorithmus für
das Rastern von Geraden und Kreisen auf dem Euklidischen Algorithmus
basiert.
3.5
Schaltjahresberechnung
Eine weitere sehr interessante Beobachtung ist, dass man mit einer Instanz
einer bestimmten Euklidischen Kette Schaltjahre im jüdischen Kalender be10
Abbildung 6: Digitale Rastergerade, die durch Punkte p und q definiert
wird..
rechnen kann. Um die Dauer einer Jahres zu berechnen, betrachtet man das
Verhältnis zwischen der Umlaufzeit der Erde um die Sonne zu der Dauer
der Drehung um eigene Achse. Dieses Verhältnis (was die Länge des durchschnittlichen Sonnenjahrs definiert) beträgt 365, 242199..., daher kommt es,
dass das Jahr in unserem - julianischen - Kalender aus 365 Tagen besteht.
Um die Differenz zwischen einem planmäßigen Kalenderjahr und dem mittleren Sonnenjahr auszugleichen, gibt es alle vier Jahre ein Schaltjahr, welches aus 366 Tagen besteht. Somit hat das durchschnittliche Kalenderjahr
im julianischen Kalender genau 365, 25 Tage, was allerdings etwas mehr als
365, 242199... ist. Anders wird die Schaltjahresberechnung im gregorianischen Kalender gehandhabt. Hier werden all die Jahre zu einem Schaltjahr,
die durch vier teilbar sind, mit Ausnahme von Jahrhundertjahre 1700, 1800,
1900 etc. Hiervon erhalten nur diejenigen einen Schalttag, deren Jahreszahl durch 400 teilbar ist. Somit hat ein durchschnittliches Tag im gregorianischen Kalender 365, 2425. In dieser Ausarbeitung interessiert uns aber
der jüdische Kalender. In diesem hat das Schaltjahr nicht einen Tag mehr,
sondern einen ganzen Monat(30 Tage) mehr. Der Zyklus besteht aus 19
Jahren, sieben davon sind Schaltjahre. In diesem Kalender wird in allen
Jahren, die bei einer Division durch 19 einen Rest von 0, 3, 6, 8, 11, 14,
oder 17 haben, ein Schaltmonat eingefügt. Jetzt betrachten wir die durch
den Algorithmus von Bjorklund generierte Sequenz für Zahlen 17 und 9:
E(7,19)=[× ⋅ ⋅ × ⋅ × ⋅ ⋅ × ⋅ ⋅ × ⋅ × ⋅ ⋅ × ⋅ ⋅]. Wir lesen diese Sequenz ab der siebten
Position: [⋅ ⋅ × ⋅ ⋅ × ⋅ × ⋅ ⋅ × ⋅ ⋅ ×⋅⋅×⋅×] und schreiben sie in der Clockwise Distance
Darstellung: (3, 6, 8, 11, 14, 17, 19). Diese Sequenz stimmt mit der Schaltjahresverteilung überein. In diesem Sinne ist der jüdische Kalender eine Instanz
einer euklidischen Kette.
11
4
Einige mathematische Eigenschaften euklidischer
Rhythmen
In diesem Kapitel untersuchen wir die Eigenschaften wie Tiefe und Gleichmäßigkeit
aus mathematischer Sicht. Als erstes führen wir wieder ein paar grundlegende Begriffe ein.
4.1
Definitionen und Notationen
Die Menge der ganzen positiven Zahlen bezeichnen wir üblicherweise mit
ZZ+ . Für k, n ∈ ZZ+ ist ggT (k, n) der größte gemeinsame Teiler. Wenn
ggT (k, n) = 1, dann nennen wir k und n relativ prim.
Wir betrachten zwei Punkte x und y, die auf einem ebenen Kreis C
liegen. Für x und y definieren wir folgende Distanzfunktionen:
¯ y) ist die Länge des
Definition 6 Akkord-Distanz (chordal distance) d(x,
Liniensegments xy,
¯ die mit euklidischer Distanz d(x, y) berechnet wird.
Definition 7 Uhrzeigersinn-Distanz (clockwise distance) d↷ (x, y) ist die
Länge des Bogens auf dem Kreis C von x nach y.
Definition 8 Geodätische Distanz (geodesic distance) dÈ (x, y) ist die Länge
des kürzesten Bogens auf dem Kreis C von x nach y. Also dÈ (x, y)=min {d↷ (x, y), d↷ (y, x)}
Einen Rhythmus der Länge n schreiben wir als eine Teilmenge der Menge
{0, 1, ..., n − 1}n . Mit Cn bezeichnen wir einen Kreis, auf dem gleichmäßig n
Punkte verteilt sind. Ein Element aus Cn ist gleichzeitig auch ein Punkt aus
{0, 1, ..., n − 1}n . Mit Cn .
Definition 9 Eine Rotation des Rhythmuses R der Länge n mit einer
ganzen Zahl ∆ ⩾ 0 ist ein Rhythmus {(i + ∆) mod n ∶ i ∈ R}.
Definition 10 Eine Skalierung des Rhythmuses R der Länge n mit einer
ganzen Zahl α ⩾ 1 ist ein Rhythmus {αi ∶ i ∈ R}
Sei R = {r0 , r1 , ..., rk−1 } ein Rhythmus der Länge n mit k Onsets. Wir
schreiben Onset ri und meinen dabei r(i mod k) mod n. Man beachte, dass
dÈ (x, y)=(rj − ri ) mod n.
Eine Multimenge der geödätischen Distanzen eines Rhythmuses R ist eine Multimenge aller disjunkten Paare von Onsets: {dÈ (x, y) ∶ ri , rj ∈ R, ri ≠ rj }.
Diese Multimenge hat die Kardinalität (k2). Die Vielfachheit eines Elements
dieser Multimenge ist die Vielfachheit einer geödätischen Distanz d.
Wie schon im ersten Kapitel definiert, ein Rhythmus ist dann Erdös-tief,
wenn es für jedes i ∈ [1, k − 1] genau eine Distanz mit der Vielfachheit i gibt.
k−1
Man beachte, dass die Summe aller Vielfachheiten ∑i=1
i = (k2) ist, was der
12
Abbildung 7: Rotationen des Rhythmuses Bembe. (a) Bembe, (b) Rotation
um eine Einheit, (c) Rotation um zwei Einheiten..
Kardinalität der Multimenge der geodätischen Distanzen entspricht. Jede
geodätische Distanz liegt zwischen 0 und ⌊ n2 ⌋. Ein Rhythmus ist Winogradtief, wenn alle Distanzvielfachheiten paarweise disjunkt sind.
Eine Schälung (shalling) eines Erdös-tiefen Rhythmuses R ist eine Anordnung s1 , s2 , ..., sk von Onsets aus R so, dass R − {s1 , s2 , ..., sk } wieder ein
Erdös-tiefer Rhythmus für i = 0, 1, ..., k ist. (Jeder Rhythmus mit höchstens
zwei Onsets ist Erdös-tief.)
Die Gleichmäßigkeit eines Rhythmuses R ist die Summe von Akkord¯ y). Die clockwise distance
Distanzen zwischen allen Onsets: ∑0⩽i<j⩽k−1 d(x,
sequence von R ist eine zyklische Sequenz (d0 , d1 , ..., dk−1 ), wo di = dÈ (ri , ri+1 )
für alle i ∈ [0, k − 1]. Man beachte, dass jedes di ∈ ZZ+ und ∑i di = n.
4.2
Gleichmäßige Rhythmen
In diesem Abschnitt werden drei Algorithmen vorgestellt, die gleichmäßige
Rhythmen generieren. Wir charakterisieren Rhythmen mit maximaler Gleichmäßigkeit
und zeigen, dass für eine gegebene Rhythmuslänge und eine Anzahl von Onsets, diese drei Algorithmen einen eindeutigen Rhythmus mit maximaler
Gleichmäßigkeit generieren.
4.2.1
Algorithmen und deren Eigenschaften
Für k Onsets und Rhythmuslänge n, mit k betrachten wir folgende drei
Algorithmen.
Clough-Douthett(k,n)
1. return ⌊ in
k ⌋ ∶ i ∈ [0, k − 1]
Snap(k,n)
13
1. Sei D eine Menge von k gleichmäßig verteilen Punkten auf Cn , so
dass D ∩ Cn = ∅
2. Für jeden Punkt x ∈ D sei x′ der nächste zum x Punkt in Cn im
Uhrzeigersinn
3. return {x′ ∶ x ∈ D}
Euclid(k,n)
1. if n ist durch k restlos teilbar then
return ( nk , nk , ..., nk )
´¹¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¸¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹¶
k
2. else
a ← n mod k
(x1 , x2 , ..., xa ) ← Euclidean(k, a)
return ⌊ nk ⌋, ..., ⌊ nk ⌋, ⌈ nk ⌉; ⌊ nk ⌋, ..., ⌊ nk ⌋, ⌈ nk ⌉; ...; ⌊ nk ⌋, ..., ⌊ nk ⌋, ⌈ nk ⌉;
´¹¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¸¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹¶
´¹¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¸¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹¶
´¹¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¸¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹¶
x1 −1
x2 −1
xa −1
3. end if
Weiter beschäftigen wir uns mit einem der wichtigsten Theoremen dieser
Ausarbeitung.
14
Theorem 11 Seien n ⩽ k ⩽ 2 aus ZZ+ . Folgende Aussagen sind äquivalent
für einen Rhythmus R = {r0 , r1 , ..., rk−1 }n mit k Onsets und der Länge n:
(A) R hat maximale Gleichmäßigkeit (Summe von Akkord-Distanzen aller
Onsets-Paare);
(B) R ist eine Rotation von einem Clough-Douthett(k, n)-Rhythmus;
(C) R ist eine Rotation von einem Snap(k, n)-Rhythmus;
(D) R ist eine Rotation von einem Euclidean(k, n)-Rhythmus;
(⋆) für alle l ∈ [1, k] und i ∈ [0, k − 1] ein geordnetes Paar (ri , ri+l ) ist die
ln
Uhrzeigersinn-Distanz d↷ (ri , ri+l ) ∈ {⌊ ln
k ⌋, ⌊ k ⌋}.
Außerdem, bis auf eine Rotation, gibt es einen einzigen und eindeutigen
Rhythmus, für den diese Aussagen gelten.
Man beachte, dass die Gleichmäßigkeit eines Rhythmuses unverändert
bleibt, wenn der Rhythmus rückwärts abgespielt wird. Daher, wenn ein eindeutiger Rhythmus maximale Gleichmäßigkeit hat, bleibt es derselbe Rhythmus, wenn er rückwärts abgespielt wird.
Wir zeigen zunächst, dass jeder von drei vorgestellten Algorithmen die
Eigenschaft (⋆) besitzt, danach zeigen wir, dass so ein Rhythmus eindeutig
ist, schließlich zeigen wir, dass der eindeutige Rhythmus mit der Eigenschaft
(⋆) seine Gleichmäßigkeit maximiert.
Beweis. (B) ⇒ (⋆) Sei R = {r0 , r1 , ..., rk−1 }n ein Clough-Douthett(k, n)
Rhythmus. Wir betrachten ein geordnetes Paar (ri , ri+l ) von Onsets aus R.
Sei pi = in mod k und pl = ln mod k. Wegen Symmetrie nehmen wir an,
dass ri ⩽ rk−1 mod k . Dann ist die Uhrzeigersinn-Distanz
(i+l)n
pi +pl
pi +pl
in
ln
in
ln
d↷ (ri , ri+l ) = ⌊ k ⌋ − ⌊ in
k ⌋ = ⌊ k ⌋ + ⌊ k ⌋ + ⌊ k ⌋ − ⌊ k ⌋ = ⌊ k ⌋ + ⌊ k ⌋,
pi +pl
ln
dies ist ⌊ ln
◻
k ⌋ oder ⌈ k ⌉, weil ⌊ k ⌋ ∈ {0, 1}.
Ein ähnlicher Beweis zeigt, dass der Rhythmus ⌈ in
k ⌉ ∶ i ∈ [0, k − 1] die Eigenschaft (⋆) erfüllt. Folgende Behauptung ist der Behauptung (⋆) äquivalent:
(⋆⋆) Wenn (d0 , d1 , ..., dk−1 ) Uhrzeiger-Distanz Sequenz von R ist, dann für
alle l ∈ [1, k] die Summe von beliebigen l aufeinanderfolgenden Elementen
ln
entweder ⌊ ln
k ⌋ oder ⌈ k ⌉ ist.
Beweis. (C)⇒ (⋆⋆). Sei (d0 , d1 , ..., dk−1 ) Uhrzeigersinn-Distanz Sequenz
eines Rhythmuses definiert von Snap(k,n). Wir führen den WiderspruchBeweis und nehmen an, dass für ein l ∈ [1, k] die Summe von l auf einander
folgenden Elementen aus (d0 , d1 , ..., dk−1 ) größer als ⌈ ln
k ⌉. Für den Fall, dass
ln
die Summe kleiner als ⌈ k ⌉ ist, ist der Beweis analog. Wir nehmen an, dass
diese l auf einander folgende Elemente (d0 , d1 , ..., dl−1 ) sind. Wir benutzen
die Notation des Algorithmuses, seien x0 , x1 , ..., xl Punkte aus D so, dass
d↔ (x′i , x′i+1 ) = di für alle i ∈ [0, l − 1]. Dann ist d↔ (x′1 , x′l+1 ) ⩽ ⌈ ln
k ⌉ + 1.
nl
ln
↔
′
↔ ′
Jetzt ist d (xl+1 , xl+1 ) < 1. Dann ist d (x1 , xl+1 ) > ⌈ k ⌉ ⩾ k , woraus folgt
15
d↔ (x1 , xl+1 ) > ln
k . Dies widerspricht der Tatsache, dass die Punkte aus D
im ersten Schritt des Algorithmuses gleichmäßig auf dem Kreis Cn verteilt
wurden.
◻
Beweis. (D) ⇒ (⋆⋆). Wir führen Induktion über k durch. Sei R=Euclidean(k, n).
Falls n durch k ohne Rest teilbar ist, dann R = ( nk , nk , ..., nk ), was (D) erfüllt.
Sonst sei a = n mod k und sei (x1 , x2 , ..., xa ) = Euclidean(k, a). Induktiv,
für alle l ∈ [1, a] ist die Summe von l aufeinander folgenden Elementen aus
lk
(x1 , x2 , ..., xa ) gleich ⌊ lk
a ⌋ oder ⌈ a ⌉. Sei S eine Folge von m aufeinanderfolgenden Elementen aus R. Für 1 ⩽ i ⩽ j ⩽ a und 0 ⩽ s ⩽ xi −1 und 0 ⩽ t ⩽ xj −1
haben wir
S = (⌊ nk ⌋, ..., ⌊ nk ⌋, ⌈ nk ⌉, ⌊ nk ⌋, ..., ⌊ nk ⌋, ⌈ nk ⌉, ..., ⌊ nk ⌋, ..., ⌊ nk ⌋, ⌈ nk ⌉, ⌊ nk ⌋, ..., ⌊ nk ⌋.
´¹¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¸¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹¶
´¹¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¸¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹¶
´¹¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¸¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹¶
´¹¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¸¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹ ¹¶
xi+1 −1
s
xj−1
t
mn
mn
Uns bleibt zu zeigen, dass ⌊ mn
k ⌋ ⩽ ∑ S ⩽ ⌈ k ⌉. Erst beweisen wir ∑ S ⩾ ⌊ k ⌋.
Wir betrachten den Worstcase, wenn die Summe ∑ S minimal ist, das ist
der Fall, wenn s = xi − 1 und t = xj − 1. Induktiv folgt,
m + 1 = ∑ xa ja=i ⩽ ⌈
(j−i+1)k
⌉.
a
Daher
am
k
⩽ ka ⌈
(j−i+1)k
⌉ − ka
a
⩽
a
k
(
(j−i−1)k+a−1
) − ka
a
= j − i − 1 − k1 .
Also folgt ⌊ am
k ⌋ ⩽ j − i und
n
∑ S = m⌊ nk ⌋ + j − i ⩾ m⌊ nk ⌋ + ⌊ am
k ⌋ = ⌊m⌊ k ⌋ +
am
k ⌋
(k⌊ nk ⌋ + a)⌋ = ⌊ mn
= ⌊m
k
k ⌋.
Zum Schluss zeigen wir ∑ S ⩽ ⌊ mn
k ⌋. Wir betrachten wieder den Worstcase, wenn ∑ S maximal ist, also wenn s = 0 und t = 0. Wieder induktiv,
m − 1 = ∑ xa ja=i ⩾ ⌊
(j−i+1)k
⌋.
a
Es folgt
am
k
⩾ ka ⌊
(j−i+1)k
⌋ − ka
a
⩽
a
k
(
(j−i−1)k+a−1
) + ka
a
= j − i − 1 + k1 .
Also folgt daraus ⌈ am
k ⌉ ⩾ j − i und
n
∑ S = m⌊ nk ⌋ + j − i ⩽ m⌊ nk ⌋ + ⌈ am
k ⌉ = ⌈m⌊ k ⌋ +
am
k ⌉
(k⌊ nk ⌋ + a)⌉ = ⌈ mn
= ⌈m
k
k ⌉.
◻
16
4.2.2
Eindeutigkeit
In diesem Abschnitt wird die Eindeutigkeit der von den drei Algorithmen
generierten Rhythmen gezeigt. Dafür benötigen wir ein paar Lemmas aus
der Zahlentheorie. Zur Erinnerung: eine ganze Zahl x ist modulo-m-invers
zu einer anderen ganzen Zahl y, wenn xy1( mod m).
Lemma 12 Eine ganze Zahl x hat eine modulo-m-Inverse y genau dann,
wenn x und m relativ prim sind. Außerdem gilt:
y ∈ [1, m − 1].
Der Beweis dieses Lemmas kann im Buch von J. Stillwell Elements of Num”
ber Theory“ nachgeschlagen werden.
Lemma 13 Wenn x und y relativ prim, dann ix ≡/ jx( mod m) für alle
verschiedenen i, j ∈ [1, k − 1].
Beweis. Man nehme an, dass ixjx( mod m) für i, j ∈ [1, m − 1]. Nach
Lemma 12, hat x eine modulo-m-Inverse. Daher gilt i( mod m) und i = j,
weil i, j ∈ [0, m − 1].
◻
Lemma 14 Für relativ prime ganze Zahlen n und k mit 2 ⩽ k ⩽ n, gibt es
eine ganze Zahl l ∈ [1, k − 1] mit
(a) ln ≡ 1( mod k),
(b) iljl( mod k) für alle verschiedenen i, j ∈ [0, k − 1],
ln
(c) l⌊ ln
k ⌋j⌊ k ⌋( mod n) für alle verschiedenen i, j ∈ [0, k − 1].
Beweis. Nach Lemma 12 mit x = n und m = k, hat n eine modulo-k-Inverse,
nämlich l. Das beweist (a). Dadurch sind k und l relativ prim nach Lemma
12 mit x = l und m = k. Daher folgt (b) direkt aus Lemma 13. Seit t = ⌊ ln
k ⌋.
Dann ln = kt + 1. Nach Lemma 13 mit m = n und x = t (und weil k), muss
man nur zeigen, dass t und n relativ prim sind, um (c) zu beweisen. Sei
g = ggt(t, n). Somit ist l ng = k gt + g1 . Weil ng und gt ganze Zahlen sind, ist g1
auch eine ganze Zahl und g = 1. Aussage (c) ist somit bewiesen.
◻
Folgendes Theorem beweist nun die Eindeutigkeit.
Theorem 15 Für alle n, k ∈ ZZ+ mit 2 ⩽ k ⩽ n, gibt es nur einen einzigen
Rhythmus mit k Onsets und der Länge n, der Eigenschaft (⋆) hat.
Beweis. Sei R = r0 , ..., rk−1 n ein Rhythmus, der Eigenschaft (⋆) besitzt. An
dieser Stelle ist es wichtig noch mal zu erwähnen, dass der Index des Onsets
mod k und deren Wert mod n genommen wird. Also bedeutet ri = x somit
ri mod k = x mod n. Sei g = ggt(k, n). Wir betrachten drei Fälle für den
Wert von g.
Fall 1. g = k: Da R für l (⋆) genügt, hat jedes geordnete Paar (ri , ri+1 )
17
clockwise distance nk . Durch eine Rotation von R können wir annehmen,
dass r0 = 0. Dadurch ist ri = in
k für alle i ∈ [1, k − 1]. Daher ist R eindeutig
definiert.
Fall 2. g = 1 (siehe Abbildung): Nach Lemma 14 gibt es eine ganze Zahl
ln
l ∈ [1, k − 1] so, dass ln ≡ 1( mod k). Daher ln = (k − 1)⌊ ln
k ⌋ + ⌈ k ⌉. Also aus
k Onset-Paaren (ri , ri+1 haben k − 1 davon clockwise distance ⌊ ln
k ⌋ und ein
ln
hat clockwise distance von ⌈ k ⌉. Dank der Rotation, können wir annehmen,
ln
dass r0 und rk−l = n − ⌈ ln
k ⌉. Daher ril = i⌊ k ⌋ für alle i ∈ [0, k − 1], r(il) mod k =
(i ∗ ⌊ ln
k ⌋) mod n. Nach Lemma 14 (b) und (c), definiert das k eindeutige
Onsets von R. Daher ist R in diesem Fall eindeutig definiert.
Abbildung 8: Illustration vom Fall 2 mit n = 12 und k = 7 mit l = 3, weil
ln
3 × 12 = 1( mod 7). Wir haben ⌊ ln
k ⌋ = 6 und ⌈ k ⌉ = 5. Durch eine Rotation
können wir annehmen, dass r0 = 0 und rk−l = r4 = 6 (blaue Punkte), dann
folgt die Position von den restlichen Onsets (Pfeile)..
Fall 3. g ∈ [2, k −1] (siehe Abbildung): Sei k ′ = f rackg und n′ = f racng zwei
ln
′
→
′
ganze Zahlen. Da R (⋆) erfüllt und ⌊ ln
k ⌋ = ⌈ k ⌉ = n , haben wir d (ri , ri+k ) =
′
n für alle i ∈ [0, k − 1]. Daher
rik′ +j = in′ + rj (Gleichung 1)
für alle i ∈ [0, g − 1] und j ∈ [0, n′ − 1].
Jetzt ist nun ggt(n′ , k ′ ) = 1. Nach Lemma 14 gibt es eine ganze Zahl
′ ′
′ ′
l′ ∈ [1, k ′ − 1] so, dass l′ n′ ≡ 1( mod k ′ ). Daher l′ n′ = (k ′ − 1)⌊ l kn′ ⌋ + ⌈ l kn′ ⌉,
′ ′
′ ′
daraus folgt l′ n = (k −g)⌊ l kn′ ⌋+g⌊ l kn′ ⌋. Daher haben k −g Onsets-Paaren (aus
′ ′
′ ′
insgesamt k) clockwise distance ⌊ l kn′ ⌋undgP aarehabenDistanz⌈ l kn′ ⌉. Durch
′ ′
eine Rotation von R dürfen wir annehmen, dass r0 = 0 und rl′ = ⌈ l kn′ ⌉. Nach
Gleichung 1 mit j = 0 und j = l′ , haben wir
′ ′
rik′ = in′ und rik′ +l′ = in′ + ⌈ l kn′ ⌉ (Gleichung 2)
′ ′
für alle i ∈ [0, g −1]. Dies gilt für g Onsets-Paare, die clockwise distance ⌈ l kn′ ⌉
′ ′
haben. Die restlichen k − g Paare haben clockwise distance ⌊ l kn′ ⌋.
18
Abbildung 9: Illustration vom Fall 3 mit n = 15, k = 9, g = 3, n′ = 5, und
′ ′
′ ′
k ′ = 3. Wir haben l = 2, weil 2×5 = 1( mod 3). Daher ⌊ l kn′ ⌋ = 4 und ⌈ l kn′ ⌉ = 3.
Wir haben L0 = 0, L1 = 4 und L2 = 7. Eine Rotation fixiert die ersten drei
Onsets (blaue Punkte), die Positionen von den nächsten drei folgen daraus
(grüne Punkte), welche schließlich die Positionen den restlichen drei Onsets
implizieren (gelbe Punkte)..
Wir definieren L0 = 0 und Lj = ⌈ l kn′ ⌉ + (j − 1)⌊ l kn′ ⌋ für alle j ∈ [1, k ′ − 1].
Durch Gleichung 2 folgt, rik′ +jl′ = in′ +Lj für alle i ∈ [0, g−1] und j ∈ [0, k ′ −1],
also rik′ +jl′ mod k = (in′ + Lj ) mod n.
Zu zeigen, dass R eindeutig ist, müssen wir zeigen, dass für i ∈ [0, g − 1]
und j ∈ [0, k ′ − 1] die Zahlen ik ′ + jl′ verschieden mod k und in′ + Lj
verschieden mod n. Als erstes zeigen wir, dass ik ′ + jl′ verschieden sind.
Wir nehmen an, dass
ik ′ + jl′ ≡ pk ′ + jl′ ( mod k)
für ein i, p ∈ [0, g − 1] und j, q ∈ [0, k ′ − 1] (Gleichung 3). Da k = k ′ g, können
wir (ik ′ + jl′ ) mod k als ein Produkt von k ′ plus Rest von mod k ′ . Also,
′
′
′
(ik ′ + jl′ ) mod k = k ′ ((i + ⌊ jl
k′ ⌋ mod g) + (jl mod k ).
Durch die Gleichung 3 folgt daraus
′
pl′
′
′
′
′
′
′
k ((i + ⌊ jl
k′ ⌋) mod g) + (jl mod k ) = k ((p + ⌊ k′ ⌋) mod g) + (ql mod k )
(Gleichung 4).
′ ′
′ ′
Daher gilt jl′ = ql′ ( mod k ′ ) und j = q nach Lemma 14 (c). Durch das
Einsetzen j = q in die Gleichung 4, folgt j ≡ p( mod g). Das impliziert i = p,
weil i, p ∈ [0, g − 1]. Das beweist, dass Zahlen ik ′ + jl′ verschieden mod k
sind.
Nun zeigen wir, dass in′ kLj disjunkt mod n sind.
Man nehme an, dass für irgendwelche i, p ∈ [0, g − 1] und j, q ∈ [0, k ′ − 1]
gilt
in′ + Lj ≡ pn′ + Lq ( mod n) (Gleichung 5).
19
Weil n = n′ g, schreiben wir (in′ + Lj ) mod n als folgendes Produkt:
L
(in′ + Lj ) mod n = n′ ((i + ⌊ nj′ ⌋) mod g) + (Lq´ mod n′ ).
Mit Hilfe der Gleichung 5 folgt daraus
L
L
′
n ((i + ⌊ nj′ ⌋) mod g) + (Lj mod n′ ) = n′ ((p + ⌊ nq′ ⌋) mod g) + (Lq mod n′ ).
(Gleichung 6).
Deshalb ist Lj ≡ Lq ( mod n′ ). Wir verlangen, dass j = q ist. Wenn j = 0
ist, dann Lj = 0, analog für q und Lq . Jetzt nehmen wir an, dass j, q ⩾ 1. In
′ ′
′ ′
diesem Fall ist Lj = j⌊ l kn′ ⌋ + 1 und Lq = q⌊ l kn′ ⌋ + 1. Daher
′ ′
L
j⌊ l kn′ ⌋ ≡ q⌊ nj′ ⌋( mod k ′ ).
Nach Lemma 14 (c) j = q. Durch das einsetzten von j = q in die Gleichung 6,
erhalten wir i ≡ p( mod g). Also ist i = p, weil i, p ∈ [0, g − 1]. Dies beweist,
dass in′ + Lj disjunkt mod n sind.
Somit ist bewiesen, dass der von den drei Algorithmen generierte R eindeutig ist.
◻
4.2.3
Maximale Gleichmäßigkeit
Nun, um das Theorem 11 vollständig zu beweisen, bleibt uns nur noch zu
zeigen, dass R maximale Gleichmäßigkeit besitzt. Wir werden zwei Lemmas
beweise, aus denen wir anschließen die Maximalität der Gleichmäßigkeit
folgern werden.
¯ w)
Seien v, w Punkte mit geödätischer Distanz d auf einem Kreis C. d(v,
¯ w).
ist eine Funktion von d, unabhängig von v und w. Sei f (C, d) = d(v,
Lemma 16 Für alle geodätische Längen x ⩽ d auf einem Kreis C gilt:
f (C, x) + f (C, d − x) ⩽ 2f (C, d2 . Die Gleichheit gilt nur für d = 2x.
Beweis. Wir können annehmen, dass C ein Einheitskreis ist. Wir betrachten
gleichschenkliges Dreieck, der vom Mittelpunkt des Kreises und zwei Punkten, deren Distanz d ist, aufgespannt wird. Nun haben wir 21 f (C, d) = sin d2 ,
f (C, d) = 2 sin d2 . Die ist äquivalent zu sin x + sin(d − x) ⩽ 2 sin d2 für alle
x ⩽ d. In dem Intervall 0 ⩽ x ⩽ d, nimmt sin x zu und sin d − x ab. Daher ist
sin x + sin(d − x) maximal, wenn x = d − x ist. Das ist, wenn d = 2x.
◻
Für einen Rhythmus R = r1 , ..., rk−1 n , für alle l ∈ [1, k], sei S(R, l) =
k−1 ¯
∑i=0 d(ri , ri+l ) Summe aller Akkord-Distanzen in R. Eigenschaft (A) sagt,
dass R maximale ∑kl=1 S(R, l) besitzt. Wir untersuchen jetzt Rhythmen,
die S(R, l) Maxima haben. Sei nun D(R, l) eine Multimenge von clockwise Distanzen d↔ (ri , ri+l ) ∶ i ∈ [0, k − 1]. Dann ist S(R, l) durch D(R, l)
definiert, also S(R, l) = ∑ f (Cn , d) ∶ d ∈ D(R, l), dabei ist f(Cn , d) ∶ d ∈
D(R, l)eineM ultimenge.
Lemma 17 Seien 1 ⩽ l ⩽ k ⩽ n ganze Zahlen. Ein Rhythmus R = r1 , ..., rk−1 n
maximiert S(R, l) genau dann, wenn ∣d→ (ri , ri+l ) − d→ (rj , rj+l )∣ ⩽ 1 für alle
i, j ∈ [0, k − 1].
20
Beweis. Wir nehmen an, dass R = r1 , ..., rk−1 n maximale S(R, l) hat. Sei
di = d↔ (ri , ri+l ) für alle i, j ∈ [0, k − 1]. Wir führen einen Gegenbeweis
und nehmen an, dass für irgendwelche p, q ∈ [0, k − 1]dp ⩾ dp + 2 ist. Wir
können auch annehmen, dass q < p, dp = dq + 2 und di = dq + 1 für alle
i ∈ [q + 1, p − 1]. Definiere r′ = ri + 1 für alle i ∈ [q + 1, p], ri′ = ri für alle restlichen i. Sei R′ = r1′ , ..., rk′ − 1n . Daher D(R, l) D(R′ , l) = dp , dq und
D(R′ , l) D(R, l) = dp − 1, dq + 1. Sei nun dp − 1 = dq + 1 = 12 . Nach Lemma 16,
f (Cn , dp ) + f (Cn , dq ) < 2f (Cn , 12 (dp , dq )). Daraus folgt S(R, l) < S(R′ , l),
was der Annahme widerspricht, dass S(R, l) maximal war. Somit ist die
Hinrichtung bewiesen.
Sei nun R so, dass ∣d→ (ri , ri+l ) − d→ (rj , rj+l )∣ ⩽ 1 für alle i, j ∈ [0, k −
1] gilt. Man nehme an, dass S(R, l) nicht maximal ist. Deswegen existiert
ein von R verschiedener Rhythmus T = t0 , ..., tk−1 , der S(T, l) maximiert.
Daraus folgt, D(T, l) ≠ D(R, l). Da ∑ D(R, l) = ∑ D(T, l)(= ln), haben wir
d→ (ti , ti+l )−d→ (tj , tj+l ) ⩾ 2 für ein i, j ∈ [0, k−1]. Daraus folgt, dass T S(T, l)
nicht maximiert. Der Widerspruch beweist, dass R S(R, l) maximiert.
◻
k−1 ¯
Weil ∑i=0 d(ri , ri+l ) = ln für jeden Rhythmus gilt, können wir das Lemma
17 folgendermaßen aufschreiben.
Korollar 18 Seien 1 ⩽ l ⩽ k ⩽ n ganze Zahlen. Ein Rhythmus R = r1 , ..., rk−1 n
ln
maximiert S(R, l) genau dann, wenn d→ (ri , ri+l ) ∈ ⌈ ln
k ⌉, ⌊ k ⌋ für alle i ∈
[0, k − 1]
Beweis. (⋆) ⇒ (A). Wenn für einen Rhythmus R die Eigenschaft (⋆) erfüllt
ist, maximiert R nach Korollar 18 S(R, l) für alle l. Daher maximiert R auch
◻
∑l S(r, l).
Beweis. (A) ⇒ (⋆). Nach Theorem 11, gibt es einen eindeutigen Rhythmus
R, der Eigenschaft (⋆) besitzt. Wir nehmen an, es gibt noch einen Rhythmus T ≠ R mit der Eigenschaft (A). Dann muss ein Paar (ti , ti+l ) aus T
ln
existieren, mit clockwise distance d→ (ti , ti+l ) ∉ ⌈ ln
k ⌉, ⌊ k ⌋. Nach dem Korollar
18 gilt S(T, l) < S(R, l). Da T Eigenschaft (A) besitzt, ist ∑kl=1 S(T, l) ⩾
∑kl=1 S(R, l). Für ein l′ haben wir S(R, l′ ) < S(T, l′ ). Das führt aber zu einem Widerspruch, weil wegen Korollar 18 S(R, l′ ) ⩾ S(T, l′ ) gelten muss.
◻
Somit haben wir das Theorem 11 komplett bewiesen. Jetzt können wir
weiter gehen und zeigen, dass dieses Theorem generalisiert für jede andere
Metrik, die der Lemma 16 genügt, werden kann. Eine Funktion g ∶ [0, π] →
IR+ ∪ 0 ist halbierend, wenn für alle geodätische Distanzen x ⩽ d ⩽ π auf
einem Einheitskreis folgendes gilt: g(x)+g(d−x) ⩽ 2g(f racd2, mit Gleichheit
nur bei d = 2x. Nun folgt die Generalisierung des Theorems 11.
Theorem 19 Seien n ⩾ k ⩾ 2 ganze Zahlen. Sei g eine halbierende Funktion. Folgende Aussagen sind für einen Rhythmus R = r0 , ..., rk−1 n äquivalent:
k−1
È
(A) R maximiert ∑k−1
i=0 ∑j=i+1 g(d (ri , rj )),
21
(B) R ist definiert durch Clought-Douthett(k, n),
(C) R ist definiert durch Snap(k, n),
(D) R ist definiert durch Euclidean(k, n),
(⋆) für alle l ∈ [1, k] und i ∈ [0, k − 1] hat ein Paar (ri , ri+l ) clockwise diln
stance d(ri , ti+l ∈ ⌈ ln
k ⌉, ⌊ k ⌋
Bis auf eine Rotation, gibt es nur einen einzigen Rhythmus für gegebene
n, k, der all diese Eigenschaften besitzt.
Nun haben wir eine wichtige Eigenschaft euklidischer Rhythmen untersucht, nämlich Gleichmäßigkeit. Natürlich gibt es auch ein paar interessante
Fakten über die Tiefe von euklidischen Rhythmen. Zum Beispiel, dass ein
Rhythmus R, mit k ⩽ ⌊ n2 ⌋ + 1 genau dann Erdös-tief ist, wenn n und k
relativ prim sind. Dies wird in dieser Ausarbeitung aber nicht bewiesen,
da man für manche Hilfslemmas und Theoremen einige Kenntnisse aus der
Graphen-Theorie benötigt, deren Erläuterung den Rahmen dieser Ausarbeitung sprengen würde.
5
Literaturempfehlung
Für all die Leser, die sich mit dem Thema Euklidische Rhythmen“ genauer
”
auseinander setzen möchten, empfehlen wir neben dem Original-Paper The
”
distance geometry of music“ von E. D. Demaine et al, folgende Arbeiten:
Prelude to musical geometry“ von B.J. McCartin, Euclidean algorithms
”
”
and musical theory“ von V. Brun, Maximally even sets“ von J. Clough und
”
J.Douthett.
Literatur
[1] E. D. Demaine, F. Gomes-Martin, H. M. ans David Rappaport, P. Taslakian, G. T. Toussaint, T. Winograd, and D. R. Wood. The distance
geometry of music. Computational Geometry: Theory and Applications,
42:429 – 454, 2009.
22