Fakultät für Informatik Algorithm Engineering (LS 11) 44221
Werbung
 44221")
Effiziente
Enumerationsalgorithmen für
Common Subtree Probleme
Andre Droschinsky
Algorithm Engineering Report
TR14-1-002
Dezember 2014
ISSN 1864-4503
Fakultät für Informatik
Algorithm Engineering (LS 11)
44221 Dortmund / Germany
http://ls11-www.cs.uni-dortmund.de/
Diplomarbeit
Effiziente Enumerationsalgorithmen für
Common Subtree Probleme
Andre Droschinsky
24. Februar 2014
Betreuer:
Prof. Dr. Petra Mutzel
Dipl.-Inform. Nils Kriege
Fakultät für Informatik
Algorithm Engineering (Ls11)
Technische Universität Dortmund
http://ls11-www.cs.tu-dortmund.de
Inhaltsverzeichnis
1 Einleitung
1
2 Das Maximum Common Subtree Problem
3
2.1
Theoretische Grundlagen . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3
2.2
Der Algorithmus von Edmonds . . . . . . . . . . . . . . . . . . . . . . . . .
7
2.2.1
Baumzerlegung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8
2.2.2
Dynamische Programmierung . . . . . . . . . . . . . . . . . . . . . .
9
2.2.3
Zusammenfügen der Teillösungen . . . . . . . . . . . . . . . . . . . . 11
2.2.4
Laufzeit und Speicherplatz . . . . . . . . . . . . . . . . . . . . . . . . 12
2.3
Bestimmung eines MCST oder MCSTI . . . . . . . . . . . . . . . . . . . . . 13
2.4
Maximum Weight Bipartite Matching . . . . . . . . . . . . . . . . . . . . . 14
2.4.1
MaxWBM’ durch Aufzählung aller maximalen Matchings . . . . . . 15
2.4.2
Reduktion auf Maximum Weight Bipartite Perfect Matching . . . . . 17
3 Enumeration von Common Subtrees und CSTI
23
3.1
Grundlagen der Enumeration . . . . . . . . . . . . . . . . . . . . . . . . . . 23
3.2
Verwandte Arbeiten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
3.3
3.4
3.5
3.2.1
Enumeration von maximalen CCISGI . . . . . . . . . . . . . . . . . 27
3.2.2
Enumeration von Maximum Weight Bipartite Matchings . . . . . . . 28
Enumeration von Maximum Common Subtree Isomorphismen . . . . . . . . 32
3.3.1
Enumeration von Maximum CSTI auf gewurzelten Bäumen . . . . . 34
3.3.2
Mehrfache Ausgabe gleicher Isomorphismen vermeiden . . . . . . . . 38
3.3.3
Laufzeit und Speicherverbrauch . . . . . . . . . . . . . . . . . . . . . 41
Enumerationsvarianten und -kriterien . . . . . . . . . . . . . . . . . . . . . . 43
3.4.1
Maximale Common Subtree Isomorphismen . . . . . . . . . . . . . . 43
3.4.2
Maximale CSTI mit Mindestgröße . . . . . . . . . . . . . . . . . . . 45
3.4.3
Enumerationskriterien . . . . . . . . . . . . . . . . . . . . . . . . . . 49
Knoten- und Kantenbezeichner . . . . . . . . . . . . . . . . . . . . . . . . . 49
3.5.1
Enumeration von Common Weighted Subtree Isomorphismen . . . . 51
3.5.2
Enumeration von Common Labeled Subtree Isomorphismen . . . . . 53
i
ii
INHALTSVERZEICHNIS
3.6
3.7
Enumeration von Common Subtrees . . . . . . . . . . . . . . . . . . . . . . 54
3.6.1
Baumkanonisierung . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
3.6.2
Einfügen einer Baumkanonisierung in einen sortierten Binärbaum . . 56
3.6.3
Dynamische Programmierung . . . . . . . . . . . . . . . . . . . . . . 57
3.6.4
Zusammenfügen der Teillösungen . . . . . . . . . . . . . . . . . . . . 57
3.6.5
Maximale CST und maximale CST mit Mindestgröße . . . . . . . . 60
3.6.6
Laufzeit und Speicherverbrauch . . . . . . . . . . . . . . . . . . . . . 62
3.6.7
Enumeration von Teilbäumen, auf denen ein Isomorphismus existiert
3.6.8
Beschleunigungstechniken . . . . . . . . . . . . . . . . . . . . . . . . 65
Parallelisierung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
4 Experimentelle Resultate
4.1
4.2
4.3
62
69
Common Subtree Isomorphismen . . . . . . . . . . . . . . . . . . . . . . . . 69
4.1.1
Ergebnisse der Programms . . . . . . . . . . . . . . . . . . . . . . . . 70
4.1.2
Analyse und Bewertung . . . . . . . . . . . . . . . . . . . . . . . . . 75
Common Subtrees . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
4.2.1
Ergebnisse der Programms . . . . . . . . . . . . . . . . . . . . . . . . 78
4.2.2
Analyse und Bewertung . . . . . . . . . . . . . . . . . . . . . . . . . 80
Teilbaumpaare, auf denen ein Isomorphismus existiert . . . . . . . . . . . . 82
4.3.1
Ergebnisse der Programms . . . . . . . . . . . . . . . . . . . . . . . . 82
4.3.2
Analyse und Bewertung . . . . . . . . . . . . . . . . . . . . . . . . . 83
5 Zusammenfassung und Ausblick
85
A Weitere Informationen
89
A.1 Implementierung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
A.2 Konfigurationsdatei . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
A.3 Bedienungsanleitung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
Abbildungsverzeichnis
94
Algorithmenverzeichnis
95
Tabellenverzeichnis
97
Index
101
Literaturverzeichnis
103
Erklärung
105
Kapitel 1
Einleitung
Diese Diplomarbeit befasst sich mit der Enumeration von Common Subtrees und Common Subtree Isomorphismen. Cuissart und Hébrard schreiben: „Graphs are widely used
to represent objects in various domains such as chemical information, computer imaging
etc.“ [11]. Koch führt weiter aus: „In many applications it is important to find maximal
common subgraphs in two graphs. Because the problem is NP-complete it cannot be solved for arbitrarily large graphs.“ [17]. Die Suche nach gemeinsamen Teilgraphen ist folglich
eine wichtige und schwierige Aufgabe in vielen Anwendungsgebieten. Für dieses Problem
existieren zahlreiche Veröffentlichungen [6, 7, 11, 17, 19, 25], auf die in Kapitel 3 teilweise
eingegangen wird. Die Datenobjekte können in Form von Bäumen, einer Teilmenge der
Graphen, vorliegen. Dies ist beispielsweise bei sogenannten Feature Trees [24] gegeben.
Feature Trees sind auf eine Baumstruktur reduzierte Moleküle. Diese Arbeit befasst sich
mit dem spezialisierten Problem, in dem Bäume als Eingabe dienen. Es wird unter anderem
gezeigt, dass die Enumeration von maximalen Common Subtree Isomorphismen für diese
Problemstellung wesentlich schneller als mit einem Algorithmus für allgemeine Graphen
erfolgen kann, indem die speziellen Eigenschaften von Bäumen ausgenutzt werden. Das
Vergleichsverfahren von Cazals und Karande [7] wird in Kapitel 3 vorgestellt.
Die in dieser Arbeit entwickelten Enumerationsverfahren basieren auf dem Algorithmus von Edmonds und Matula [21] zur Bestimmung der Größe eines Maximum Common
Subtree. Dieses Problem ist in polynomieller Zeit lösbar [21]. In Kapitel 2 wird dieses Verfahren vorgestellt und schrittweise modifiziert, so dass zunächst ein konkreter Maximum
Common Subtree Isomorphismus berechnet wird. Darauf aufbauend erfolgt in Kapitel 3
eine Erweiterung um die Enumeration dieser Isomorphismen. Dazu bedarf es der Hilfe von
Enumerationsalgorithmen für verschiedene Typen von Matchings, die ebenfalls in Kapitel 3
vorgestellt werden. Als Alternative zu Isomorphismen wird die Enumeration von Maximum
Common Subtrees behandelt. Des Weiteren werden zahlreiche Modifikationen der Probleme betrachtet. Dazu gehören Bäume mit Bezeichnern und die Aufzählung von maximalen
anstelle von Maximum Common Subtree Isomorphismen bzw. Maximum Common Sub1
2
KAPITEL 1. EINLEITUNG
trees. Zu den vorgestellten Algorithmen erfolgen theoretische Untersuchungen in Bezug auf
Laufzeit und Speicherplatzverbrauch. Die Enumeration von maximalen Common Subtree
Isomorphismen ermöglicht einen direkten Vergleich mit dem Enumerationsverfahren für
allgemeine Graphen bei Eingabe von Bäumen.
Die vorgestellten Algorithmen wurden mit Hilfe der Programmiersprache C++ in ein
Programm übersetzt, das Teil dieser Diplomarbeit ist. Die Algorithmen werden in experimentellen Untersuchungen in Kapitel 4 auf ihre praktische Effizienz geprüft. Neben
Zufallsbäumen und speziellen worst-case-Beispielen dienen dem Programm auch Feature
Trees als Eingabe.
Kapitel 2
Das Maximum Common Subtree
Problem
Dieses Kapitel beschreibt das Maximum Common Subtree Problem, welches in Abschnitt
2.1 formalisiert wird. In Abschnitt 2.2 wird der Algorithmus von Edmonds und Matula
zur Bestimmung der Größe eines Maximum Common Subtrees vorgestellt. Im Abschnitt
2.3 wird beschrieben, wie sich dieser Algorithmus modifizieren lässt, so dass ein Maximum
Common Subtree Isomorphismus bzw. Maximum Common Subtree bestimmt werden kann.
Abschnitt 2.4 behandelt das Teilproblem, ein Maximum Weight Bipartite Matching zu
bestimmen.
2.1
Theoretische Grundlagen
In diesem Abschnitt wird das Maximum Common Subtree Problem formal definiert. Dazu
müssen zunächst einige Grundbegriffe aus der Graphentheorie eingeführt werden. Die folgenden Definitionen basieren überwiegend auf dem Buch „Graph Theory“ von R. Diestel
[12].
Definition 2.1 (Graph [12]). Ein Graph ist ein Paar G = (V, E) von Mengen mit der
Eigenschaft E ⊆ [V ]2 .
Die Elemente in V werden Knoten genannt. Die Elemente der Menge E, die eine Teilmenge
aller zweielementigen Teilmengen von V ist, werden als Kanten bezeichnet. Eine andere
übliche Notation für die Menge [V ]2 ist [V ]2 := P2 (V ). Für eine Kante e = {u, v} werden
die Knoten u und v als inzident zu e bezeichnet und die Kante häufig abkürzend uv
geschrieben. Für einen Graphen G = (V, E) sei V [G] := V und E[G] := E. Ein Graph
ohne Knoten wird als leerer Graph bezeichnet. Ein Graph mit E = [V ]2 wird vollständiger
Graph genannt. Die Größe |G| = |VG | eines Graphen G ist definiert als die Anzahl der
Knoten des Graphen. Die Notation für die Anzahl der Kanten lautet ||G|| = |EG |. Der
3
4
KAPITEL 2. DAS MAXIMUM COMMON SUBTREE PROBLEM
Grad eines Knotens v ist durch die Anzahl der mit diesem Knoten inzidenten Kanten
definiert [12].
Bemerkung 2.2. Der in Definition 2.1 definierte Graph wird in anderen Literaturquellen
auch als ungerichteter Graph bezeichnet. Wenn im Folgenden der Begriff Graph verwendet
wird, ist dabei immer, sofern nicht anders erwähnt, der ungerichtete Graph nach Definition
2.1 gemeint.
Neben ungerichteten Graphen existieren noch gerichtete Graphen.
Definition 2.3 (Gerichteter Graph [5]). Ein gerichteter Graph ist ein Paar G = (V, E)
von Mengen mit der Eigenschaft E ⊆ {(u, v) ∈ V × V | u 6= v}.
Im Unterschied zum ungerichteten Graphen ist beim gerichteten Graphen eine Kante
ein geordnetes Paar von Knoten. Die Menge der Kanten muss dabei nicht symmetrisch
sein. Für eine Kante (u, v) kann die Kante (v, u) vorhanden sein, muss aber nicht. Nach
der Definition von Diestel sind in einem gerichteten Graphen auch Kanten (u, u) mit u ∈
V erlaubt. Diese werden dort als Schleifen bezeichnet. Außerdem sieht die Definition in
[12] vor, dass die Kantenmenge eine Multimenge ist. Das bedeutet, dass gleiche Elemente
in E mehrmals vorhanden sein können. Diese Kanten werden von Diestel als parallele
Kanten bezeichnet. In dieser Arbeit werden weder Schleifen noch parallele Kanten benötigt.
Definition 2.3 impliziert, dass beides nicht vorkommt.
Eine Teilmenge aller Graphen ist die Menge der Bäume. Um diese definieren zu können,
müssen zunächst weitere Begriffe eingeführt werden.
Definition 2.4 (Teilgraph, induzierter Teilgraph [12]).
Seien G1 = (V1 , E1 ) und G2 = (V2 , E2 ) Graphen. Gilt V1 ⊆ V2 und E1 ⊆ E2 , so wird G1
Teilgraph von G2 genannt. Dieser Zusammenhang wird als G1 ⊆ G2 notiert und informell
mit G2 enthält G1 bezeichnet. Die Notation G1 ⊂ G2 bedeutet, dass G1 in G2 enthalten
ist, und G2 mindestens einen Knoten oder eine Kante mehr als G1 hat.
Gilt weiterhin E1 = {uv ∈ E2 | u, v ∈ V1 }, so wird G1 induzierter Teilgraph von G2
genannt. Die Notation dazu lautet G1 =: G[V1 ].
Für einen induzierten Teilgraphen gilt somit, dass es keinen anderen Teilgraphen mit
derselben Knotenmenge und mehr Kanten gibt. Anders ausgedrückt bedeutet dies, dass in
einem induzierten Teilgraphen genau die Kanten fehlen, die zu fehlenden Knoten inzident
sind.
Definition 2.5 (Pfad, Kreis, azyklisch [12]).
Ein durch die Mengen V = {v0 , v1 , . . . , vk }, k ≥ 0 und E = {v0 v1 , v1 v2 , . . . , vk−1 vk }
definierter Graph G wird als Pfad bezeichnet.
Die Länge eines Pfades ist definiert durch die Anzahl der Kanten des Pfades.
2.1. THEORETISCHE GRUNDLAGEN
5
Gilt v0 = vk und ist k ≥ 3, wird G Kreis genannt.
Ein Graph, der keinen Kreis enthält, wird azyklisch genannt.
Offenbar gilt, dass k der Länge des Pfades entspricht. Insbesondere sind auch Pfade der
Länge 0 erlaubt. Ein Kreis besteht aus mindestens 3 Kanten, wobei der Anfangs- und
Endknoten identisch sind. Der oben definierte Pfad wird in [12] auch mit Pfad von v0 nach
vk bezeichnet.
Definition 2.6 (Zusammenhängender Graph, Zusammenhangskomponente [12]).
Sei G = (V, E) ein Graph. Wenn G für alle Knoten u, v ∈ V einen Pfad von u nach v enthält, wird G als zusammenhängender Graph bezeichnet.
Ein zusammenhängender Teilgraph G0 eines Graphen G wird Zusammenhangskomponente
von G genannt, wenn kein zusammenhängender Teilgraph G00 von G mit G0 ⊂ G00 existiert.
Mit diesen Begriffen lassen sich Bäume definieren.
Definition 2.7 (Baum, Wald [12]). Ein azyklischer Graph wird Wald genannt. Ein
Wald, der zusammenhängt, wird Baum genannt.
Ein induzierter zusammenhängender Teilgraph eines Baumes soll Teilbaum genannt
werden. Dieser ist insbesondere wieder ein Baum. Für einen Baum T = (V, E) gilt, dass
|V | = |E| + 1 ist. Außerdem gilt, dass durch Wegnahme einer beliebigen Kante der Zusammenhang verloren geht. Es gilt sogar, dass ein Baum durch Wegnahme einer Kante in
genau zwei Zusammenhangskomponenten zerfällt. Diese offensichtliche Eigenschaft spielt
in den später vorgestellten Algorithmen eine wichtige Rolle. Anzumerken ist noch, dass für
zwei beliebige Knoten u, v ∈ V eines Baumes T = (V, E) genau ein Pfad von u nach v in
T enthalten ist [12].
Definition 2.8 (Isomorphismus [12]). Zwei Graphen G1 = (V1 , E1 ) und G2 = (V2 , E2 )
werden isomorph genannt, wenn eine bijektive Abbildung ϕ : V1 → V2 existiert mit uv ∈
E1 ⇐⇒ ϕ(u)ϕ(v) ∈ E2 für alle u, v ∈ V1 . Die Notation lautet dann G1 ' G2 und ϕ wird
Isomorphismus genannt.
Die Größe |ϕ| eines Isomorphismus ϕ : V1 → V2 wird als |ϕ| := |V1 | = |V2 | definiert.
Falls G1 zu einem Teilgraphen von G2 isomorph ist, wird dies abkürzend mit G1 ist
in G2 enthalten bezeichnet. Für das in der Klasse NP enthaltene Entscheidungsproblem,
ob zwei Graphen isomorph sind, ist zum Zeitpunkt dieser Arbeit nicht bekannt, ob es in
P enthalten ist. Es ist ebenfalls unbekannt, ob es NP-vollständig ist [14]. Die Komplexitätsklasse P beinhaltet alle Probleme, die in polynomieller Zeit deterministisch entschieden
werden können. In der Klasse NP sind die Probleme enthalten, die in polynomieller Zeit
nichtdeterministisch entschieden werden können. Weiterführende Informationen zu Komplexitätsklassen finden sich beispielsweise in [3]. Ein Maximum Common Subtree lässt sich
wie folgt definieren.
6
KAPITEL 2. DAS MAXIMUM COMMON SUBTREE PROBLEM
r4
r1
r2
s1
s2
r3
s4
t2
s3
(a) Maximum CSTI
t3
t1
(b) Maximum CST
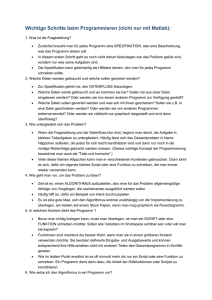
Abbildung 2.1: Zusammenhang zwischen Maximum CSTI und Maximum CST
Definition 2.9 (Common Subtree (CST), Maximum CST [21]). Seien T1 und T2
Bäume. Ein Baum T ist ein Common Subtree von T1 und T2 , wenn T isomorph zu Teilbäumen von T1 und T2 ist.
T wird Maximum Common Subtree genannt, wenn es keinen anderen Common Subtree
von T1 und T2 gibt, der größer als T ist.
Edmonds hat gezeigt, dass sich die Größe eines Maximum Common Subtree zweier Bäume
in Polynomialzeit bestimmen lässt [21]. Dieser Algorithmus wird im folgenden Abschnitt 2.2
vorgestellt und spielt in vielen der in dieser Arbeit vorgestellten Enumerationsalgorithmen
eine wichtige Rolle. In natürlicher Weise lässt sich aus den Begriffen Common Subtree und
Isomorphismus ein Common Subtree Isomorphismus ableiten.
Definition 2.10 (Common Subtree Isomorphismus (CSTI), Maximum CSTI).
0 ) und S 0 = (V 0 , E 0 ) Teilbäume dieser Bäume.
Seien R und S Bäume, und R0 = (VR0 , ER
S
S
Wenn R0 und S 0 isomorph sind, wird ein zugehöriger Isomorphismus ϕ : VR0 → VS0 (vgl.
Def. 2.8) als Common Subtree Isomorphismus (CSTI) bezeichnet.
Falls ϕ größtmöglich ist, wird ϕ Maximum Common Subtree Isomorphismus (MCSTI)
genannt.
Common Subtree und Common Subtree Isomorphimus stehen nah zusammen. Aus
einem CSTI lässt sich ein CST direkt ablesen. Mit den Bezeichnungen aus Definition 2.10
ist es ein zu R0 bzw. S 0 isomorpher Baum. Andererseits lässt sich zu jedem Common Subtree
T = (V, E) mindestens ein CSTI finden. Abbildung 2.1 zeigt diesen Zusammenhang. Zu
dem dort dargestellten Maximum CSTI ϕ zwischen R und S, definiert durch ϕ(r1 ) =
s1 , ϕ(r2 ) = s2 , ϕ(r3 ) = s3 , ist der zugehörige Maximum CST T dargestellt. Zu diesem
Maximum CST gibt es neben ϕ beispielsweise noch den MCSTI ϕ0 (r3 ) = s2 , ϕ0 (r2 ) =
s3 , ϕ0 (r4 ) = s4 . Offensichtlich gilt, dass die Größe eines MCST und MCSTI identisch ist.
Neben Maximum CSTI existieren auch maximale CSTI, die wie folgt definiert sind.
Definition 2.11 (Maximaler CST, Maximaler CSTI [17]). Sei ϕ ein Common Subtree Isomorphismus von Bäumen T1 und T2 . Dieser wird maximaler CSTI genannt, wenn
er nicht zu einem größeren CSTI von T1 und T2 erweiterbar ist.
2.2. DER ALGORITHMUS VON EDMONDS
7
Sei T ein Common Subtree. T wird maximaler CST genannt, wenn es keinen anderen
Common Subtree T 0 von T1 und T2 gibt mit T ⊂ T 0 .
Maximale CST und CSTI können als lokal beste Lösungen aufgefasst werden. Es ist
unmittelbar klar, dass jeder Maximum CST bzw. Maximum CSTI auch ein maximaler
CST bzw. CSTI ist. Umgekehrt gilt dies jedoch nicht.
Graphen können neben ihrer Struktur aus Knoten und Kanten weitere Informationen
enthalten. Ein Beispiel dazu sind Bezeichner, die auch Label genannt werden.
Definition 2.12 (Gelabelter Graph [9]). Ein gelabelter Graph ist ein Graph G = (V, E)
zusammen mit einer Abbildung l : V ∪ E → Σ.
Die Elemente der endlichen Menge Σ werden Label oder Bezeichner genannt. Für einen
Knoten v ∈ V ist l(v) der Bezeichner von v. Für eine Kante e ∈ E ist l(e) der Bezeichner
von e. Die Abbildung l wird im Folgenden Labelfunktion genannt. Der Begriff des gelabelten Graph lässt sich auf Teilklassen von Graphen, beispielsweise Bäume, übertragen. Die
Definitionen werden entsprechend um die Abbildung l erweitert.
Zu erwähnen sind die vielen unterschiedlichen Definition von gelabelten Graphen in der
Literatur. So muss der Graph nach Bunke [6] vollständig sein. In [2] und vielen anderen
Quellen haben nur Knoten Bezeichner. Sollen nur die Knoten oder nur die Kanten unterscheidbar sein, so kann jeweils allen Kanten oder allen Knoten das gleiche Label gegeben
werden. Ein Beispiel für die Menge Σ ist die Menge aller Atome und Bindungstypen zwischen Atomen. Auf diese Art lässt sich ein Molekül dann durch einen gelabelten Graphen
darstellen. Die Begriffe Isomorphismus und Common Subtree Isomorphismus lassen sich
wie folgt auf gelabelten Graphen definieren.
Definition 2.13 (Isomorphismus auf gelabelten Graphen [6]). Seien G1 = (V1 , E1 )
und G2 = (V2 , E2 ) Graphen. Seien weiterhin l1 : V1 ∪ E1 → Σ und l2 : V2 ∪ E2 → Σ
Labelfunktionen. G1 und G2 werden isomorph bezüglich l1 und l2 genannt, wenn eine Isomorphismus ϕ : V1 → V2 existiert mit l1 (v) = l2 (ϕ(v)) für alle Knoten v ∈ V1 und
l1 (uv) = l2 (ϕ(u)ϕ(v)) für alle Kanten uv ∈ E1 .
Bei einem Isomorphismus auf gelabelten Graphen müssen folglich die aufeinander abgebildeten Knoten und Kanten die gleichen Bezeichner haben. Bunke [6] verwendet in Bezug
auf gelabelte Graphen für Knoten und Kanten getrennte Labelfunktionen. Die Definition
des Isomorphismus auf gelabelten Graphen unterscheidet sich somit marginal von der hier
gegebenen Definition.
2.2
Der Algorithmus von Edmonds
In diesem Abschnitt wird der Algorithmus von Edmonds und Matula [21] vorgestellt. Bei
Eingabe zweier Bäume R = (VR , ER ) und S = (VS , ES ) bestimmt dieser Algorithmus die
8
KAPITEL 2. DAS MAXIMUM COMMON SUBTREE PROBLEM
r1
r2
r4
r3
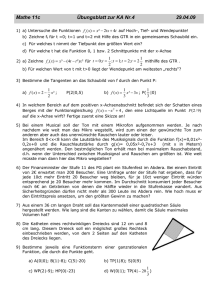
Abbildung 2.2: Gewurzelter Baum mit Wurzel r1
Größe eines MCST bzw. MCSTI der gegebenen Bäume. Matula schreibt „A polynomial
bounded procedure for solving the subtree isomorphism problem was independently discovered by Edmonds1 and Matula [20] in 1968 [...] Edmond’s solution [...] resolved the more
general question of determining the largest subtree of T isomorphic to a subtree of S.“ [21].
Da sich diese Arbeit vorwiegend mit der generelleren Methode von Edmonds beschäftigt,
wird der Algorithmus im Folgenden mit Algorithmus von Edmonds bezeichnet.
Im Algorithmus wird die Baumeigenschaft, dass ein Baum bei Wegnahme einer Kante in
genau zwei Zusammenhangskomponenten zerfällt, ausgenutzt. Mit Hilfe von dynamischer
Programmierung auf diesen Komponenten wird daraus die Größe eines MCST für die
Bäume der Eingabe bestimmt. Die einzelnen Schritte werden im Folgenden vorgestellt.
2.2.1
Baumzerlegung
Sei e = uv eine beliebige Kante eines Baumes T . Wird diese entfernt, entstehen zwei
Zusammenhangskomponenten, wovon eine den Knoten u und die andere den Knoten v
enthält. Diese Komponenten können als gewurzelte Teilbäume mit Knoten u bzw. v als
Wurzel aufgefasst werden.
Definition 2.14 (Gewurzelter Baum [12]). Ein gewurzelter Baum ist ein Baum mit
einem ausgezeichneten Wurzelknoten.
Für zwei benachbarte Knoten u, v in einem gewurzelten Baum herrscht eine Elter-KindBeziehung. Dabei ist u Elter von v, wenn die Länge des Pfades von u zur Wurzel kürzer
ist als die Länge des Pfades von v zur Wurzel, sonst ist u Kind von v. Knoten, die keine
Kinder besitzen, werden als Blatt bezeichnet.
In Abbildung 2.2 ist ein gewurzelter Baum mit Wurzel r1 dargestellt. Der Knoten r2 ist
Kind von r1 und Elter von r3 und r4 . Die Knoten r3 und r4 sind Blätter des gewurzelten
Baumes.
Definition 2.15 (Gewurzelter Teilbaum [21]). Sei T ein Baum und e = uv eine beliebige Kante des Baumes, die aus diesem entfernt wird. Die Zusammenhangskomponenten
werden als gewurzelte Teilbäume Tvu bzw. Tuv bezeichnet. Die Komponente Tvu besitzt den
Knoten v als Wurzel, Tuv den Knoten u.
1
laut Matulas persönlicher Kommunikation mit Edmonds [21]
2.2. DER ALGORITHMUS VON EDMONDS
9
u
v
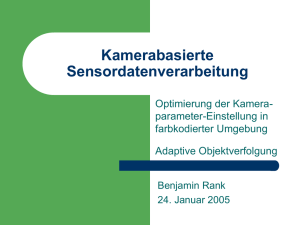
Abbildung 2.3: Der gewurzelte Teilbaum Tvu ist hellgrün dargestellt. Tuv ist dunkelgrün dargestellt.
Die gestrichelte Linie in rot ist die Trennungskante.
In Abbildung 2.3 ist die Zerlegung eines Baumes T in die zwei gewurzelten Teilbäume
Tuv
und Tvu dargestellt. Ein CSTI auf zwei gewurzelten Teilbäumen wird im Folgenden
manchmal abkürzend Isomorphismus genannt. Dabei ist aber stets klar, dass ein maximaler
CSTI bzw. MCSTI gemeint ist.
2.2.2
Dynamische Programmierung
Im zweiten Schritt des Algorithmus von Edmonds wird für alle Paare (Rvu , Sxw ) von gewurzelten Teilbäumen die Größe D(Rvu , Sxw ) des zugehörigen MCSTI bestimmt. Einschränkend
gilt dabei, dass in den Isomorphismen jeweils v auf x abgebildet wird. Es gibt 4 · |ER | · |ES |
solcher Paare. Diese Anzahl ergibt sich aus 2 · |ER | gewurzelten Teilbäumen für R und
2 · |ES | für S. Zur Bestimmung der Werte D(Rvu , Sxw ) kann auf ein Maximum Weight Bipartite Matching zurückgegriffen werden. In Abschnitt 2.4 wird dieses Matching beschrieben
und verschiedene Lösungsmöglichkeiten vorgestellt.
Seien {v1 , v2 , . . . , vk } die Kinder von v und {x1 , x2 , . . . , xl } die Kinder von x. Sei M
ein Maximum Weight Bipartite Matching auf dem vollständigen bipartiten Graphen zwischen den Kindern von v und x mit den Kantengewichten w(vi xj ) = D(Rvvi , Sxxj ) für alle
i ∈ {1, . . . , k} und j ∈ {1, . . . , l} (vgl. Definition 2.19). Falls k = 0 oder l = 0 ist, also mindestens einer der beiden gewurzelten Teilbäume aus nur einem Blatt besteht, gilt
D(Rvu , Sxw ) = 1. Ansonsten gilt D(Rvu , Sxw ) = 1 + W (M ) für das oben genannte Matching.
Jeder gewurzelte Teilbaum Rvvi besitzt mindestens einen Knoten weniger als Rvu und jeder
Teilbaum Sxxj mindestens einen weniger als Sxw . D ist somit wohldefiniert.
In Abbildung 2.4 sind zwei gewurzelte Teilbäume Rvu und Sxw und der zugehörige bipartite Graph dargestellt, auf dem das Maximum Weight Bipartite Matching bestimmt
werden soll. Die Kantengewichte zwischen den Kindern von v und x lauten w(v2 x2 ) = 3,
w(v2 x3 ) = 2, sowie w(vi xj ) = 1 für alle anderen Kanten. Daraus ergibt sich D(Rvu , Sxw ) = 5.
Dies wird durch ϕ(v) = x und beispielsweise ϕ(v1 ) = x1 und ϕ(v2 ) = x2 realisiert.
10
KAPITEL 2. DAS MAXIMUM COMMON SUBTREE PROBLEM
u
w
v
x
v1
x1
v2
x2
x3
x1
v1
3
v2
(a) Rvu und Sxw
x2
2
x3
(b) Zugehöriger gewichteter bipartiter Graph
Abbildung 2.4: Der Wert D(Rvu , Sxw ) wird mit Hilfe eines MaxWBM bestimmt.
Eingabe: Rvu , Sxw
Ausgabe: D(Rvu , Sxw )
1:
2:
3:
4:
5:
if D(Rvu , Sxw ) noch nicht berechnet then
if Rvu oder Sxw ist ein Blatt then
D(Rvu , Sxw ) ← 1
else
for all i ∈ {1, . . . , k}, j ∈ {1, . . . , l} // k, l wie in Abschnitt 2.2.2 do
w(vi xj ) ← GetD(Rvvi , Sxxj )
6:
7:
end for
8:
D(Rvu , Sxw ) ← 1 + W (M ) // W (M ) wie in Abschnitt 2.2.2
9:
end if
10:
end if
11:
return D(Rvu , Sxw )
Algorithmus 2.1: GetD(Rvu , Sxw )
Die Werte von D lassen sich berechnen, indem die Teilbäume der Größe nach sortiert
werden, wie von Matula in [21] beschrieben. Dann sind in jedem Schritt alle Kantengewichte
bekannt. Die Sortierung ist aber nicht nötig, alternativ lassen sich die Werte von D mit
dem vom Verfasser dieser Arbeit entwickelten Algorithmus 2.1 (GetD) berechnen.
Falls der Wert D(Rvu , Sxw ) bereits berechnet wurde, wird dieser von Algorithmus GetD
sofort ausgegeben. Ansonsten wird der Wert auf 1 gesetzt, falls einer der Teilbäume ein
Blatt ist, oder auf 1 + W (M ) für das weiter oben beschriebene Maximum Weight Bipartite
Matching. Die Struktur des Algorithmus GetD stellt sicher, dass trotz Rekursion kein
Matching mehrmals berechnet wird, unabhängig davon, wie oft GetD aufgerufen wird. Da
2.2. DER ALGORITHMUS VON EDMONDS
11
die gewurzelten Bäume, bezogen auf festes S und R, statisch sind, müssen beim Aufruf
von GetD nicht zwei gewurzelte Bäume übergeben werden, sondern lediglich Referenzen
auf diese. Die Funktionsaufrufe selbst kosten folglich jeweils nur O(1) Zeit.
Dass bei dieser Implementierung die Sortierung entfällt, ist nicht der einzige Vorteil.
GetD kann jederzeit für beliebige Teilbäume aufgerufen werden. Bei der Berechnung des
Wertes wird sichergestellt, dass kein Matching berechnet wird, das für die Berechnung des
gesuchten Wertes nicht notwendig ist. Im Algorithmus von Edmonds werden alle Werte
benötigt, es gibt mit dieser Implementierung folglich keine Ersparnis. Allerdings werden
später Algorithmen vorgestellt, die andere Werte nach dem gleichen Schema berechnen.
Dort werden teilweise, abhängig von der Eingabe, nicht alle Werte benötigt. Unnötige
Berechnungen entfallen dabei automatisch.
2.2.3
Zusammenfügen der Teillösungen
Im vorherigen Abschnitt 2.2.2 wird die Größe eines MCSTI für zwei gewurzelte Teilbäume
mit der Einschränkung, dass die Wurzeln aufeinander abgebildet werden, berechnet. Im
letzten Schritt des Algorithmus von Edmonds wird daraus die Größe eines MCSTI für die
gegebenen Bäume R und S der Eingabe bestimmt. Dies wird im Folgenden beschrieben.
Seien Rvu und Sxw zwei gewurzelte Teilbäume. Dann liefert, wie in Abschnitt 2.2.2 beschrieben, GetD(Rvu , Sxw ) die Größe eines MCSTI der beiden Teilbäume Rvu und Sxw mit
der Einschränkung, dass v auf x abgebildet wird. GetD(Ruv , Swx ) ist die Größe eines MCSTI der beiden Teilbäume Ruv und Swx mit der Einschränkung, dass u auf w abgebildet
wird. Zusammengenommen ergibt das die Größe eines MCSTI der Bäume R und S mit
der Einschränkung, dass v auf x und u auf w abgebildet wird.
Abbildung 2.5 zeigt diesen Zusammenhang. Dort gilt D(Rvu , Sxw ) = 2, dargestellt durch
die hellgrünen und hellblauen Knoten. Weiterhin gilt D(Ruv , Swx ) = 2. Das ist durch die
dunkel gefärbten Knoten dargestellt. Ein MCSTI mit ϕ(v) = x und ϕ(u) = w hat folglich
die Größe 4. Zu beachten ist, dass die Größe eines MCSTI ohne Einschränkung an den
Isomorphismus bei den dort dargestellten Bäumen 5 beträgt. Letztgenannte Größe lässt
sich nach Edmonds mit dem folgenden Algorithmus 2.2 berechnen.
In Zeile 1 bis 4 werden die Randfälle, dass einer der beiden Bäume aus einem oder keinem Knoten besteht, behandelt. Anschließend wird das Maximum über alle wie oben beschriebenen eingeschränkten MCSTI gebildet und ausgegeben. Dieses entspricht der Größe
eines MCSTI der Bäume R und S der Eingabe. Wenn in Zeile 7 ein Paar (Rvu , Sxw ) gewählt
wurde, muss natürlich das Paar (Ruv , Swx ) nicht mehr gewählt werden, da der Lösungswert
offensichtlich identisch ist.
12
KAPITEL 2. DAS MAXIMUM COMMON SUBTREE PROBLEM
u
v
w
x
Abbildung 2.5: Ein Maximum CSTI mit der Einschränkung ϕ(u) = w und ϕ(v) = x
Eingabe: Zwei Bäume R und S
Ausgabe: Größe eines MCSTI von R und S
1:
if R oder S ist leer then
return 0
2:
3:
else if R oder S besteht aus nur einem Knoten then
return 1
4:
5:
else
6:
m ← 0 // Bisher gefundenes Maximum
7:
for all Paare (Rvu , Sxw ) von gewurzelten Teilbäumen do
8:
s ← GetD(Rvu , Sxw )+GetD(Ruv , Swx )
9:
if s > m then
m←s
10:
end if
11:
12:
end for
13:
return m
14:
end if
Algorithmus 2.2: SizeMCSTI(R, S)
2.2.4
Laufzeit und Speicherplatz
Die Laufzeit von Algorithmus 2.2 (SizeMCSTI) wird durch die Schleife über die Zeilen 7
bis 12 bestimmt. Diese wird O(|ER | · |ES |) mal durchlaufen. Nach den obigen Überlegungen muss in Algorithmus 2.1 (GetD) O(|ER | · |ES |) mal ein MaxWBM bestimmt werden.
Nach Abschnitt 2.4.2 ist die Berechnungszeit dabei jeweils durch O(max{|ER |, |ES |}3 ) beschränkt. Der Speicherbedarf liegt für die Werte von D bei O(|ER | · |ES |). Ein MaxWBM
kann nach der Berechnung verworfen werden, da nur die Größe relevant ist. Für die Berechnung eines Matchings reicht O(|ER | · |ES |) Speicherplatz aus, wenn die bipartiten Graphen
in einer Adjazenzmatrix gespeichert werden. Daraus ergibt sich folgender Satz.
2.3. BESTIMMUNG EINES MCST ODER MCSTI
r...
r4
r2
s...
s4
rk
r
r3
r1
13
sl
s
s3
s2
s1
Abbildung 2.6: Bild zur Laufzeitabschätzung in Satz 2.16
Satz 2.16. Die Größe eines Maximum Common Subtree Isomorphismus zweier Bäume
R = (VR , ER ) und S = (VS , ES ) lässt sich in Zeit O(|ER | · |ES | · max{|ER |, |ES |}3 ) bei
zusätzlichem Speicherbedarf von O(|ER | · |ES |) bestimmen.
Eine bessere Abschätzung in Satz 2.16 ist nicht möglich, wie Abbildung 2.6 zu entnehs
men ist. Nach Definition 2.24 gilt |V | = |X| = max{k, l} für die den k · l Paaren (Rrri , Ss j ),
i ∈ {1, . . . , k}, j ∈ {1, . . . , l} zugehörigen bipartiten Graphen.
2.3
Bestimmung eines MCST oder MCSTI
In diesem Abschnitt werden Modifikationen des Algorithmus von Edmonds [21] vorgestellt.
Statt der Größe eines Maximum Common Subtrees soll ein Maximum Common Subtree
Isomorphismus oder ein Maximum Common Subtree ausgegeben werden. Im Folgenden
wird dabei nur der nichttriviale Fall behandelt, in dem beide Bäume mindestens zwei
Knoten besitzen. Die genannten Modifikationen stammen vom Verfasser dieser Arbeit.
In Zeile 8 in Algorithmus 2.1 wird das Gewicht eines Maximum Weight Bipartite
Matchings bestimmt. Wie in Abschnitt 2.4 dargestellt, ergibt sich das Gewicht aus einem konkreten Matching. Dieses wird in dem modifizierten Algorithmus für jedes Paar
von gewurzelten Bäumen gespeichert. Der dazu nötige Speicherplatz beträgt O(|R| · |S|·
min{|R|, |S|}). Die ersten beiden Faktoren ergeben sich aus der Anzahl der Paare gewurzelter Teilbäume, der letzte Faktor aus der maximalen Anzahl an Matchingkanten für ein
Paar von gewurzelten Teilbäumen.
Um ein MCSTI auszugeben, wird auf Algorithmus 2.2 zurückgegriffen. Dieser wird insofern erweitert, dass neben dem Maximum m auch die Knoten u, v, w, x gespeichert werden,
die zu diesem Maximum geführt haben. In Zeile 13 wird dann nicht m ausgegeben sondern
zunächst ϕ(u) = w, ϕ(v) = x. Anschließend werden rekursiv entlang beider Paare gewurzelter Bäume (vgl. Zeile 8 von Algorithmus 2.2) die durch die gespeicherten Matchings
definierten Knotenzuordnungen ausgegeben. Es ist offensichtlich, dass auf diese Weise ein
Maximum Common Subtree Isomorphismus ausgegeben werden kann. Die Zeitschranke
entspricht der des ursprünglichen Algorithmus von Edmonds.
Ein Maximum Common Subtree lässt sich sehr ähnlich bestimmen. Im auf Definition
2.10 folgenden Absatz wurde bereits erwähnt, wie sich aus einem MCSTI ein MCST ge-
14
KAPITEL 2. DAS MAXIMUM COMMON SUBTREE PROBLEM
winnen lässt. Es muss also nur die Ausgabe verändert werden, der Rest des modifizierten
Algorithmus bleibt identisch. Dies wird an dieser Stelle deshalb nicht weiter ausgeführt.
Es ist möglich, den zusätzlichen Speicherverbrauch von O(|R|·|S|· min{|R|, |S|}) zu vermeiden. Dazu wird zunächst der unmodifizierte Algorithmus 2.2 aufgerufen, die Matchings
werden also nicht gespeichert. Die Ausgabe des Isomorphismus erfolgt dann rekursiv wie
oben beschrieben. Da die Zuordnungen nicht gespeichert wurden, werden die entsprechenden Matchings ein zweites mal berechnet und die Zuordnungen dann direkt ausgegeben.
Die Gesamtzeit des Algorithmus bleibt damit bezüglich O-Notation identisch. Analog lässt
sich ein Maximum Common Subtree ausgeben.
2.4
Maximum Weight Bipartite Matching
Im folgenden wird das in Abschnitt 2.2.2 erwähnte Maximum Weight Bipartite Matching
behandelt. Dazu werden zunächst die Begriffe bipartiter Graph und Matching definiert.
Definition 2.17 (Bipartiter Graph [12]). Sei G = (V, E) ein Graph. Wenn disjunkte
Mengen V1 und V2 existieren, so dass V = V1 ∪ V2 und alle Kanten e ∈ E nur zwischen
diesen Mengen verlaufen, wird G bipartit genannt.
Ein bipartiter Graph G ist vollständig, wenn gilt E = V1 × V2 .
Häufig wird in einem bipartiten Graphen die Zerlegung von V direkt angegeben. G =
(V1 ∪ V2 , E) bedeutet dann, dass Kanten nur zwischen V1 und V2 verlaufen, ohne dass dies
explizit erwähnt wird.
Definition 2.18 (Matching [12]). Sei G = (V, E) ein Graph. Eine Teilmenge M ⊆ E
der Kanten des Graphen wird Matching genannt, wenn die Kanten in M unabhängig sind,
das heißt für zwei beliebige Kanten uv, wx aus M gilt, dass die Knoten u, v, w, x paarweise
voneinander verschieden sind.
Wenn für ein Matching M von G kein anderes Matching M 0 mit M ⊂ M 0 existiert, wird
M maximal genannt. Zu einem maximalen Matching lässt sich also keine weitere Kante
hinzufügen. Wenn ein Knoten v zu einer Matchingkante aus M inzident ist, sagt man
M matched v, ansonsten M matched v nicht [12]. Eine andere Bezeichnung für letztere
Aussage ist v ist M -exponiert. Der Verweis auf M wird weggelassen, wenn klar ist, welches
Matching gemeint ist.
Definition 2.19 (Maximum Weight Bipartite Matching (MaxWBM) [8]).
Sei G = (V1 ∪ V2 , E) ein bipartiter Graph mit E ⊆ V1 × V2 und w : E → Q eine Gewichtsfunktion, die jeder Kante ein Gewicht zuordnet. Das Gewicht W (M ) eines Matchings
P
M ⊆ E ist definiert als W (M ) =
w(e).
e∈M
Ein Matching M im bipartiten Graphen G wird Maximum Weight Bipartite Matching
genannt, wenn es kein anderes Matching M 0 in G gibt mit W (M 0 ) > W (M ).
2.4. MAXIMUM WEIGHT BIPARTITE MATCHING
15
Da im Rahmen dieser Arbeit nur Matchings auf bipartiten Graphen berechnet werden,
wird ein MaxWBM auch als Maximum Matching bezeichnet.
Satz 2.20. Wenn alle Gewichte in einem gegebenen bipartiten Graphen mit Gewichtsfunktion positiv sind, ist jedes Maximum Weight Bipartite Matching in diesem Graphen
maximal.
Beweis. Beweis durch Widerspruch. Angenommen M sei ein Maximum Weight Bipartite
Matching, das nicht maximal ist. Dann existiert eine Kante e, die zu M hinzugefügt werden
kann, so dass M ∪ {e} ein Matching ist. Dann gilt W (M ∪ {e}) − W (M ) = w(e) > 0. Dies
ist ein Widerspruch dazu, dass M ein MaxWBM ist. Die Annahme, dass M nicht maximal
ist, ist also falsch.
In Zusammenhang mit Algorithmus 2.1 entspricht ein MaxWBM einer Zuordnung der
Kinder, so dass der CSTI für die gewurzelten Teilbäume ein MCSTI ist. Im Folgenden
werden zwei Möglichkeiten vorgestellt, ein MaxWBM zu bestimmen. Das erste Verfahren
nimmt Bezug auf Algorithmus 2.1 und stellt kein Lösungsverfahren für beliebige bipartite
Graphen dar. Dieses auf Algorithmus 2.1 zugeschnittene MaxWBM wird deshalb im Folgenden MaxWBM’ genannt. Der zugehörige bipartite Graph ist insbesondere vollständig.
2.4.1
MaxWBM’ durch Aufzählung aller maximalen Matchings
Der im Folgenden vorgestellt Algorithmus zum systematisches Aufzählen aller maximalen
Matchings, um ein MaxWBM’ zu finden, stammt vom Verfasser dieser Arbeit.
Sei G = (V ∪X, E) ein vollständiger bipartiter Graph mit 1 ≤ |V | ≤ |X|. Die letzte Bedingung ist keine Einschränkung. Sowohl V als auch X sind im Algorithmus von Edmonds
niemals leer, denn dort wird nur dann ein MaxWBM bestimmt, wenn beide gewurzelten
Teilbäume mindestens ein Kind haben. Sollte k > l (vgl. Algorithmus 2.1) sein, können
V und X vertauscht werden. Nach Satz 2.20 müssen nur maximale Matchings aufgezählt
werden, da alle Gewichte positiv sind. Für jedes maximale Matching M ⊆ E gilt, dass alle
Knoten aus V zu einer Kante aus M inzident sind. Dies folgt unmittelbar aus E = V × X
und |V | ≤ |X|. Im Folgenden soll ein Matching M durch eine Folge (zi )1≤i≤k:=|V | von
natürlichen Zahlen zi ∈ {1, 2, . . . , l := |X|} beschrieben werden. Die Folge (zi ) steht für
das Matching {v1 xz1 , v2 xz2 , . . . , vk xzk }. Aufgrund der Matchingeigenschaft gilt zi 6= zj für
i 6= j. Das Problem der Aufzählung aller maximalen Matchings kann somit reduziert werden auf die Aufzählung aller möglicher injektiven Folgen (zi ). Diese soll lexikographisch
erfolgen.
Beispiel 2.21. Sei k = 3 und l = 4. Die Folgen in lexikographischer Ordnung lauten
dann ((1, 2, 3), (1, 2, 4), (1, 3, 2), (1, 3, 4), . . . , (4, 2, 3), (4, 3, 1), (4, 3, 2)). Diese stehen für die
Matchings {v1 x1 , v2 x2 , v3 x3 }, {v1 x1 , v2 x2 , v3 x4 }, . . . , {v1 x4 , v2 x3 , v3 x2 }.
16
KAPITEL 2. DAS MAXIMUM COMMON SUBTREE PROBLEM
Satz 2.22. Das Gewicht eines MaxWBM’ kann durch lexikographische Aufzählung in Zeit
l!
O( (l−k)!
) bei zusätzlichem Speicherbedarf von O(k + l) bestimmt werden.
Beweis. Zur Berechnung des Gewichts ab dem zweiten Matching werden nicht alle Kantengewichte aufsummiert. Stattdessen werden nur die Veränderungen zum vorherigen Matching berücksichtigt. Sei (zi0 ) lexikographisch auf (zi ) folgend. Wenn dann zj durch zj0 für
ein oder mehrere j ersetzt wird, wird zum aktuellen Gewicht w(vj xzj0 ) − w(vj xzj ) für jedes
dieser j addiert. Wie in Beispiel 2.21 zu sehen, ändern sich vom letzten Glied beginnend
eine oder mehrere Zahlen. Beispielsweise ändern sich zwischen den Folgen (4, 2, 3) und
(4, 3, 1) die letzten beiden Folgenglieder. Der Zeitaufwand pro Veränderung beträgt O(1)
bei einmaliger Initialisierungszeit O(k + l) (vgl. letzter Absatz dieses Beweises). Die Laufzeit hängt damit linear von k für die erste Folge, k + l für die Initialisierung, sowie der
Anzahl der Veränderungen zwischen allen Folgen ab. Die Anzahl der Änderungen wird im
Folgenden abgeschätzt.
Die Anzahl verschiedener maximaler Matchings beträgt
l!
(l−k)! .
Dies ergibt sich kom-
binatorisch daraus, dass der Knoten v1 mit l Knoten aus X verbunden werden kann, v2
mit l − 1 Knoten und so weiter. Beim Wechsel von (zi ) zu (zi0 ) verändert sich das letzte Folgenglied immer. Falls k = l ändert sich auch das vorletzte Folgenglied immer. Das
drittletzte Folgenglied wechselt im worst case k = l bei jeder zweiten Folge. Ein Beispiel
sei k = l = 3 und die Folgen {(1, 2, 3), (1, 3, 2), (2, 1, 3), . . .} Im Fall k < l sind es mehr als
zwei Folgen, bis sich das drittletzte Glied ändert, vgl. Beispiel 2.21. Allgemein braucht es
mindestens n! Folgen für das (k − n)-te Folgenglied, bis sich dieses ändert. Dies lässt sich
mit vollständiger Induktion beweisen. Die Gesamtzahl der Änderungen ist damit durch
l!
(l−k)!
· (1 + 1 +
1
2
+
1
6
+
1
24
+ . . .) ≤
l!
(l−k)!
· (2 +
1
2
+
1
4
+
1
8
+ . . .) ≤
l!
(l−k)!
· 3 beschränkt.
Mit der konstanten Zeit O(1) pro Änderung (vgl. den folgenden Absatz) ergibt dies eine
l!
Zeitschranke von O( (l−k)!
). Die Initialisierungszeit und die Zeit für das erste Matching,
O((k + l) + k), ist darin enthalten.
Die Grundidee zur Veränderung der Folgenglieder in O(1) liegt darin, in einem Feld
N [0..l] den jeweils nächsten exponierten Knoten aus X festzuhalten. N [0] steht dabei
für den ersten (kleinster Index) exponierten Knoten. N [m] = n bedeutet dabei, dass der
nächste exponierte Knoten nach xm der Knoten xn ist. Falls N [m] = 0, gibt es keinen
exponierten Knoten xn mit Index n > m. Pro Veränderung eines Folgenglieds müssen zwei
Einträge in N aktualisiert werden. Wenn zj =: m auf n := zj0 > zj gesetzt wird, muss
N [m] = n auf N [n] gesetzt werden. Dies liegt daran, dass der nächste exponierte auf xm
folgende Knoten dann nicht mehr der Knoten xn = xzj0 sondern xN [n] ist. Andererseits ist
durch die Änderung von zj zu zj0 der Knoten xm exponiert. Dieser muss also in N wieder
gefunden werden können. Dazu wird in einem Feld V [1..k] der Index desjenigen Knoten
xr gespeichert, für den N (r) = m galt, bevor xm gematched wurde. Für zj wird dabei der
Wert r in V [j] gespeichert. N [V [j]] wird deshalb auf m gesetzt. Auf diese Weise steht in N
2.4. MAXIMUM WEIGHT BIPARTITE MATCHING
17
immer der korrekte Index des nächsten exponierten Knoten aus X. Wie in diesem Absatz
beschrieben sind dazu jeweils 2 Änderungen an N und eine an V nötig, der Zeitbedarf ist
folglich O(1) pro Veränderung eines Folgenglieds.
Um statt des Gewichts eines MaxWBM’ ein konkretes Matching zu erhalten, kann der
oben beschriebene Algorithmus insofern modifiziert werden, dass während der Aufzählung
immer das Matching mit dem bisher größten gefundenen Gewicht gespeichert wird. Dabei
ist darauf zu achten, dass nicht jedes mal das komplette Matching gespeichert wird, sondern nur die Kanten bzw. Folgenglieder, die sich im Vergleich zum vorherigen gespeicherten Matching unterscheiden. Am Ende des Durchlaufs wird dann das zuletzt gespeicherte
Matching ausgegeben. Dieses ist ein MaxWBM’. Alternativ kann der Algorithmus auch
zweimal durchlaufen werden. Im ersten Durchlauf wird das Gewicht eines MaxWBM’ bestimmt, im zweiten Durchlauf wird das lexikographisch erste Matching mit diesem Gewicht
ausgegeben. In beiden Fällen bleibt die Laufzeitschranke aus Satz 2.22 gültig.
Die Laufzeit in Satz 2.22 ist offenbar nicht durch ein Polynom in k und l beschränkt. Es
existieren allerdings Algorithmen für MaxWBM mit polynomieller Laufzeit, wie Abschnitt
2.4.2 zu entnehmen ist. Es gibt aber zwei Gründe, weshalb dieser Algorithmus dennoch
vorgestellt wurde. Zum einen wird in Kapitel 3 die Aufzählung aller maximalen Common
Subtree Isomorphismen behandelt. Ein Teilproblem in diesem Algorithmus ist die Aufzählung aller maximalen Matchings. Der in diesem Abschnitt vorgestellte Algorithmus kann
so modifiziert werden, dass jedes Matching ausgegeben bzw. in einer geeigneten Datenstruktur gespeichert wird. Die dazu nötige Zeit beträgt im Durchschnitt lediglich O(1) pro
weiterem Matching. Zum anderen sind viele Graphen in der Praxis dünn besetzt. Beispielweise gilt für ein Straßennetz mit den Knoten als Kreuzungen und Kanten als Straßen,
dass der Knotengrad bis auf sehr wenige Ausnahmen kleiner als 5 ist. Ein anderes Beispiel
sind chemischen Struktur-Graphen. Diese sind nach J. Raymond dünn besetzt: „Since 2D
chemical graphs are very sparse (i.e., the constituent vertices are of low degree), the number of edges is approximately equal to the number of vertices (i.e., |E(G)| ≈ O|V (G)|)“
[25]. Ebenso weisen die dieser Arbeit zur Verfügung stehenden Feature Trees häufig einen
niedrigen Knotengrad auf. In all diesen Fällen ist
2.4.2
l!
(l−k)!
sehr häufig „klein“.
MaxWBM durch Reduktion auf Maximum Weight Bipartite Perfect Matching
Zunächst werden die Begriffe Perfektes Matching und Maximum Weight Bipartite Perfect
Matching definiert.
Definition 2.23 (Perfektes Matching [27]). Existieren in einem Graphen G für ein
Matching M keine M -exponierten Knoten, wird dieses perfekt genannt.
18
KAPITEL 2. DAS MAXIMUM COMMON SUBTREE PROBLEM
Definition 2.24 (Maximum Weight Bipartite Perfect Matching [8]).
Sei G = (V ∪X, E) ein bipartiter Graph mit |V | = |X| und einer zugehörigen Gewichtsfunktion. Ein Matching M wird Maximum Weight Bipartite Perfect Matching (MaxWBPM)
genannt, wenn es kein anderes perfektes Matching M 0 mit größerem Gewicht gibt.
Neben der Aufzählung aller maximalen Matchings besteht eine weitere Möglichkeit, ein
MaxWBM zu finden, darin, den bipartiten Graphen in einen anderen bipartiten Graphen
zu transformieren, auf dem dann ein MaxWBPM anstelle eines MaxWBM gesucht wird.
Die Transformation stellt sicher, dass das Gewicht für beide Matchings gleich groß ist. Die
Transformation sowie die Bestimmung eines MaxWBPM wird im Folgenden beschrieben.
Ein perfektes Matching in einem bipartiten Graphen G = (V ∪ X, E) kann nur dann
existieren, wenn |V | = |X|, da Knoten aus V nur mit Knoten aus X verbunden werden
können und umgekehrt. Sei V = {v1 , v2 , . . . , vk } und X = {x1 , x2 , . . . , xl } mit k ≤ l und
E = V × X. Die Voraussetzung k ≤ l ist, wie in Abschnitt 2.4.1 beschrieben, keine Einschränkung. Die gegebene Gewichtsfunktion sei w : E → Q. Der transformierte Graph
G0 = (V 0 ∪ X, E 0 ) sei definiert durch V 0 = V ∪ {vk+1 , . . . , vl } mit E 0 = V 0 × X. Die zugehörige Gewichtsfunktion w0 ist mit w identisch, wobei den neu hinzugefügten Kanten das
Gewicht 0 zugeordnet wird. Das maximale Gewicht eines Matchings in G0 entspricht dann
offensichtlich dem maximalen Gewicht eines Matchings in G. Des Weiteren gilt offensichtlich |V 0 | = |X|. Im Folgenden wird ein Verfahren beschrieben, dass auf G0 ein MaxWBPM
findet.
Ein MaxWBPM lässt sich laut Fukuda [13] mit der ungarischen Methode von Kuhn [18]
bestimmen. Die ungarische Methode bestimmt eine optimale Lösung für ein Zuordnungsproblem [18]. Fukuda schreibt: „The Hungarian method is an efficient algorithm for finding
a minimal cost perfect matching in a weighted bipartite graph. [...] It is well-known that
an optimal solution to assignment problems can be computed efficiently by the Hungarian
method [18].“ Zu beachten ist, dass Fukuda in [13] ein Minimum Weight Bipartite Perfect
Matching (MinWBPM) auf ein Zuordnungsproblem zurückführt. Auch in vielen anderen
Literaturquellen wird ein MinWBPM statt einem MaxWBPM gesucht. Dies stellt aber
kein Problem dar. Zum einen können alle Gewichte negiert werden. Dann entspricht ein
MaxWBPM in dem gegebenen Graphen einem MinWBPM in dem Graphen mit den negativen Gewichten. Zum anderen kann auch die Transformation auf das Zuordnungsproblem
modifiziert werden. Diese zweite Möglichkeit wird im Folgenden beschrieben.
Die Bestimmung eines MaxWBPM lässt sich nach [13] als lineares Programm (P)
formulieren. Die Menge δ(v) ist durch alle zu v inzidenten Kanten definiert. Zu beachten
ist, dass im Folgenden maximiert wird, während in [13] minimiert wird.
2.4. MAXIMUM WEIGHT BIPARTITE MATCHING
19
P
Maximiere
w(e) x(e)
P
x(e) = 1
e∈E
Nebenbedingungen
∀v ∈ V ∪ X
e∈δ(v)
x(e) ∈ {0, 1}
∀e ∈ E
Die letzte Bedingung, x(e) ∈ {0, 1}, kann relaxiert werden zu x(e) ≥ 0 ∀e ∈ E. Auf
einem bipartiten Graphen führt diese Relaxierung zu einem korrekten Ergebnis [8]. Das
dazu duale Programm (D) [13] lautet
P
P
Minimiere
y(v) +
y(x)
v∈V
Nebenbedingung
x∈X
y(v) + y(x) ≥ w(e)
∀e = vx ∈ E
Für eine Lösungsvektor y ∈ RV ∪X des dualen Programms wird die zulässige Kantenmenge definiert durch E(y) := {e = vx ∈ E | y(v) + y(x) = w(e)} und der zulässige
Teilgraph durch G(y) := (V ∪X, E(y)) [13]. Zu beachten ist, dass auf den Kanten von G(y)
keine Gewichtsfunktion definiert ist. Der wohlbekannte Satz des komplementären Schlupfs
impliziert folgende Aussage [13].
Satz 2.25. Sei y ∗ ∈ RV ∪X eine optimale Lösung des dualen Programms (D). Dann hat
ein perfektes Matching M in G maximales Gewicht genau dann, wenn M ⊆ E(y ∗ )
Eine optimale Lösung y ∗ von (D) lässt sich in Zeit O(|V |3 ) finden. Dabei ergibt sich
gleichzeitig ein Matching größten Gewichts sowie der Graph G(y ∗ ) [13]. Auf diesen wird in
Abschnitt 3.2 zurückgegriffen. Die Idee, eine optimale Lösung zu finden, wird im Folgenden
beschrieben [18]. Dabei sei zunächst vorausgesetzt, dass G vollständig ist, was im Zusammenhang mit dem Algorithmus von Edmonds gegeben ist. Das von Kuhn [18] beschriebene
Verfahren lässt sich auch auf nicht vollständigen bipartiten Graphen anwenden. Die dazu
nötigen Änderungen werden am Ende dieses Abschnittes beschrieben. Zunächst folgt das
vom Verfasser dieser Arbeit gegenüber [18] modifizierte Verfahren, das einen vollständigen bipartiten Graphen voraussetzt. Dazu wird der Begriff des M -augmentierenden Pfades
eingeführt.
Definition 2.26 (M -augmentierender Pfad [26]). Sei M ein Matching in einem Graphen G = (V, E) und ein P ein durch V 0 := {v1 , v2 , . . . , vk } und E 0 := {v1 v2 , . . . , vk−1 vk }
definierter Pfad in G mit vi 6= vj für alle i 6= j. Wenn v1 und vk M -exponiert sind, für
gerades i die Kanten vi vi+1 ∈ M sind und für ungerades i die Kanten vi vi+1 ∈
/ M sind,
wird dieser Pfad M -augmentierend genannt.
Wenn die Kanten entlang eines M -augmentierenden Pfades bezüglich des Matchings ausgetauscht werden, entsteht ein neues Matching M 0 mit |M 0 | = |M | + 1. Dieser Austausch wird Augmentierung genannt. In Abbildung 2.7 ist für das Matching M1 der M1 augmentierenden Pfad P = {v5 , v1 , v6 , v3 } dargestellt. Durch die Augmentierung mit P
entsteht das Matching M2 .
20
KAPITEL 2. DAS MAXIMUM COMMON SUBTREE PROBLEM
v1
v2
v3
v1
v4
v2
v3
v4
M1
v5
v6
v7
M2
v5
v8
v6
v7
v8
(a) Matching vor Augmentie-
(b) Matching nach Augmen-
rung
tierung
Abbildung 2.7: Augmentierung eines Matchings durch den Pfad P = {v5 , v1 , v6 , v3 }
r
x1
v
V
x
X
(a) T (blaue Knoten) vor Wahl
r
V
X
(b) T nach Augmentierung
der Kante vx
Abbildung 2.8: Erweiterung von T = ({r}, ∅) um die Kanten rx1 und x1 v sowie anschließende
Augmentierung durch den Pfad von r nach x.
Für den Algorithmus sei y ein beliebiger zulässiger Lösungsvektor. Der Algorithmus
versucht in G(y) ein perfektes Matching M durch Augmentierung zu finden. Falls dies
möglich ist, ist M nach dem Satz des komplementären Schlupfs ein perfektes Matching
maximalen Gewichts in G, denn G(y) enthält die gleichen Knoten wie G, y ist eine zulässige
Lösung für das duale Programm (D) und der Vektor x des linearen Programms (P),
definiert durch x(e) = 1, falls e ∈ M und x(e) = 0, falls e ∈
/ M , stellt eine Lösung für (P)
dar [8, 22]. Ansonsten wird der Lösungsvektor y modifiziert, bis M wieder augmentiert
werden kann. Jede einzelne Modifizierung an y stellt sicher, dass G(y) um mindestens eine
Kante erweitert wird und y zulässig bleibt. Die einzelnen Schritte werden im Folgenden
genauer beschrieben.
Ein initial zulässiger Lösungsvektor in dem bipartiten Graphen G = (V ∪ X, E) lässt
sich beispielsweise durch y(v) = 0 für alle v ∈ V und y(x) = max{w(vx) | vx ∈ E}
für alle x ∈ X definieren. Anschließend führt der Algorithmus genau |V | Augmentierungen
durch. Die Augmentierungen finden dabei entlang eines Baumes T = (VT , ET ), der in G(y)
enthalten ist und schrittweise erweitert wird, statt. Zu Beginn sei T = ({r}, ∅) mit r ∈ V
als exponiertem Knoten. Sei weiterhin B(T ) := VT ∩ V und A(T ) := VT ∩ X. In jedem
Baumerweiterungsschritt wird eine Kante e = vx ∈ E(y) mit v ∈ B(T ) und x ∈
/ A(T )
gesucht.
Falls x exponiert ist, wird der Pfad von r nach x augmentiert. Wenn dann |V | Matchingkanten gefunden wurden, ist der Algorithmus fertig, da dieses Matching, wie oben
beschrieben, ein MaxWBPM in G ist. Ansonsten wird der Baum T wieder durch einen
neuen exponierten Knoten r ∈ V mit T = ({r}, ∅) initialisiert. Falls x nicht exponiert ist,
2.4. MAXIMUM WEIGHT BIPARTITE MATCHING
21
sei z der Knoten, der mit x durch eine Matchingkante verbunden ist. T wird dann um die
Kanten vx und xz erweitert.
An Abbildung 2.8 lassen sich diese Schritte demonstrieren. Der Graph G(y) sei durch
die dort dargestellten verschiedenfarbigen Kanten und Knoten definiert. Sei weiterhin T =
({r}, ∅) und rx1 die erste gewählte Kante und x1 v ∈ M . Da x1 gematched ist, ergibt sich
nach Hinzunahme von rx1 und x1 v zu T die in Abbildung 2.8 (a) dargestellte Situation
mit B(T ) = {r, v} und A(T ) = {x1 }. Die zweite gewählte Kante sei vx mit exponiertem
Knoten x. Das Matching wird augmentiert, ein neuer exponierter Knoten r ∈ V ausgewählt
und T zurückgesetzt, wie in Abbildung 2.8 (b) dargestellt.
Falls keine Kante e mit den oben genannten Eigenschaften existiert, wird y durch
y(v) ← y(v) + ε für alle v ∈ B(T ) und y(x) ← y(x) − ε für alle x ∈ A(T ) modifiziert.
Dabei wird > 0 größtmöglich gewählt, so dass y zulässig bleibt. Dies wird durch ε =
min{y(v) + y(x) − w(vx) | vx ∈ E, v ∈ B(T ) und x ∈
/ A(T )} erreicht und hat zur
Folge, dass sowohl alle Matchingkanten als auch der Baum T in G(y) enthalten bleiben.
Außerdem kommt mindestens eine Kante zu G(y) hinzu. Anschließend kann das Matching
augmentiert und/oder T erweitert werden.
Die Laufzeit hängt im Wesentlichen von den Baumerweiterungsschritten ab. Nach jeweils höchstens |V | Baumerweiterungsschritten wird M augmentiert. Außerdem ist nach
|V | Augmentierungen ein perfektes Matching in G(y) gefunden. Änderungen an y sind in
Zeit O(|V |) möglich. Insgesamt ergibt sich daher eine Zeitschranke von O(|V |3 ).
Für den allgemeinen Fall, dass G nicht vollständig ist, muss das oben beschriebene
Verfahren an zwei Stellen modifiziert werden und entspricht damit dem Verfahren von
Kuhn [18]. Zum einen kann der exponierte Knoten r beliebig aus V ∪ X gewählt werden.
Falls r aus X gewählt wird, werden die Mengen A(T ) und B(T ) vertauscht. Außerdem ist
es in einem nicht vollständigen bipartiten Graphen möglich, dass dieser gar kein perfektes
Matching enthält. Das lässt sich unmittelbar vor der Modifizierung von y feststellen. Wenn
für jede Kante vx ∈ E mit v ∈ B(T ) gilt, dass x ∈ A(T ) ist, dann existiert kein perfektes
Matching in G. An dieser Stelle ist dann auch keine Modifizierung von y durch ein ε > 0
möglich.
22
KAPITEL 2. DAS MAXIMUM COMMON SUBTREE PROBLEM
Kapitel 3
Enumeration von Common Subtrees
und Common Subtree Isomorphismen
Dieses Kapitel behandelt die Enumeration von Common Subtrees und Common Subtree
Isomorphismen. In Abschnitt 3.1 werden Enumeration und Enumerationsalgorithmen zunächst allgemein besprochen. Verwandte Arbeiten zum Thema Enumeration in Hinblick
auf Common Subtree Isomorphismen werden in Abschnitt 3.2 behandelt. Der grundlegende
Algorithmus zur Enumeration von Maximum Common Subtree Isomorphismen wird in Abschnitt 3.3 vorgestellt. Im folgenden Abschnitt 3.4 werden die Enumeration von maximalen
Common Subtree Isomorphismen und weitere Kriterien vorgestellt, nach denen enumeriert
werden kann. Um die in der Einführung erwähnten Feature Trees als Eingabe in Betracht
ziehen zu können, sind Knotenbezeichner erforderlich. Knoten- und Kantenbezeichner werden in Abschnitt 3.5 behandelt. In Abschnitt 3.6 werden Algorithmen zur Enumeration
von Common Subtrees und Teilbäumen, auf denen Isomorphismen existieren, vorgestellt.
Im folgenden Abschnitt 3.7 wird diskutiert, wie durch Parallelisierung die Berechnungszeit
verringert werden kann.
3.1
Grundlagen der Enumeration
Viele Probleme in der Informatik oder auch in anderen Wissenschaften haben eine eindeutige Lösung. Beispielsweise könnte eine Frage für solch ein Problem lauten: „Gibt es für
gegebene Bäume ein Maximum Common Subtree mindestens der Größe 10?“. Die Antwort
darauf ist „ ja“ oder „nein“. Die zweite Stufe ist die Frage nach einer konkreten Größe.
Eine passende Fragestellung ist: „Wie groß ist ein Maximum Common Subtree?“. Darauf
aufbauend wird dann in der dritten Stufe eine konkrete Lösung gesucht: „Berechne einen
Maximum Common Subtree und gebe diesen aus!“. Dies ist die übliche Gliederung in der
theoretischen Informatik [3]. Diese Varianten wurden in Kapitel 2 behandelt.
23
24
KAPITEL 3. ENUMERATION VON COMMON SUBTREES UND CSTI
r...
r4
rk
r
r3
r2
s...
s4
r1
sk
s
s3
s2
s1
Abbildung 3.1: Anzahl Maximum CSTI nicht polynomiell beschränkt.
Je nach Problemstellung möchten die Anwender möglicherweise nicht nur eine Lösung
haben, sondern einige oder alle Lösungen, die den Anforderungen entsprechen. In der Praxis gibt es mehrere Beispiele. Im öffentlichen Nahverkehr existieren häufig verschiedene
Wege, die zum Ziel führen, sich aber in Zeit, Kosten, Transportmittel und so weiter unterscheiden können. Der Anwender definiert dann Kriterien wie Startzeit oder Zielstation
und das Programm liefert dann mehrere Lösungen, die diesen Anforderungen entsprechen.
Ein weiteres Beispiel sind chemische Strukturen, die auf Ähnlichkeit untersucht werden.
Hier können Anwender beispielsweise die Aufgabe stellen, dass aus einer Menge von 50
Strukturen jene 10 Paare gefunden werden sollen, die die größte Übereinstimmung haben. Sollen mehrere gültige Lösungen gefunden werden, wird dies als Enumeration oder
Aufzählung bezeichnet. Die Algorithmen, die diese Aufgabe erfüllen, werden entsprechend
Enumerationsalgorithmen genannt.
Für Algorithmen der ersten drei Stufen kann häufig eine genaue (niedrigste) Laufzeitschranke in Abhängigkeit der Eingabegröße angegeben werden. Bei Enumerationsalgorithmen ist eine Abhängigkeit allein von der Eingabegröße wenig sinnvoll, wie Abbildung 3.1
zu entnehmen ist. Bei den MCSTI gilt ϕ(r) = s, die anderen Knoten werden beliebig aufeinander abgebildet. Die Anzahl der Maximum CSTI beträgt somit k! und ist deshalb nicht
durch ein Polynom in k beschränkt. Selbst, wenn jede einzelne Lösung in O(1) berechnet
werden könnte, wäre die Gesamtzeit dennoch nicht polynomiell. Aus diesem Grund werden Enumerationsalgorithmen anders klassifiziert. Im Folgenden werden einige Klassen,
basierend auf [15], vorgestellt.
(a) Polynomial total time. Die Gesamtzeit der Berechnung ist beschränkt durch ein Polynom in der Größe der Eingabe sowie der tatsächlichen Anzahl der Lösungen. Ein Beispiel
nach [15] ist ein Algorithmus zur Aufzählung aller maximalen unabhängigen Teilmengen
von Paull und Unger mit einer Laufzeit von O(n2 C). Dabei ist n die Größe der Eingabe
und C die Anzahl der Lösungen.
(b) Polynomial delay. Die Zeit zwischen den einzelnen Lösungen, bis zur ersten Ausgabe und zwischen der letzten Ausgabe und dem Programmende ist durch ein Polynom
in der Größe der Eingabe beschränkt. Ein Beispiel dazu ist der Algorithmus von Uno [27]
zur Bestimmung aller perfekten Matchings in einem bipartiten Graphen. Dieser Hilfsalgo-
3.2. VERWANDTE ARBEITEN
25
rithmus wird unter anderem in Abschnitt 3.3 benötigt und in Abschnitt 3.2.2 vorgestellt.
Jeder Algorithmus aus dieser Klasse ist natürlich auch in (a) enthalten.
(c) Specific order. Die Ausgabe erfolgt in einer bestimmten Reihenfolge, beispielsweise
sortiert nach einem bestimmten Kriterium. Der Algorithmus zur Berechnung eines MaxWBM’ aus Abschnitt 2.4.1 kann als Enumerationsalgorithmus aufgefasst werden, wenn
alle während des Algorithmus berechneten maximalen Matchings ausgegeben werden. Die
Ausgabe erfolgt dabei in lexikographischer Ordnung.
(d) Polynomial space. Zur Berechnung der Ausgabe darf nur polynomiell viel Speicherplatz, bezogen auf die Eingabelänge, verwenden werden. Für den MaxWBM’-Algorithmus
in der Enumerationsvariante trifft dies beispielsweise zu. Die Algorithmen aus Abschnitt
3.6 brauchen allerdings mehr als polynomiell viel Platz.
In modernen Publikationen, wie beispielsweise in [10], ist diese Unterteilung teils präziser und formal genau definiert. Für diese Arbeit soll die oben vorgestellte Unterteilung
genügen.
3.2
Verwandte Arbeiten
In diesem Abschnitt werden verschiedene Ansätze zur Enumeration von Common Subgraph
Isomorphismen beschrieben. Zunächst lässt sich festhalten, dass es zahlreiche Varianten
dieses Problems gibt [4, 7, 11, 17, 19]. Die Notationen und Abkürzungen sind in den
genannten Quellen nicht einheitlich. Die im Folgenden angegebene Definitionen orientieren
sich an den Notationen aus Kapitel 2 dieser Arbeit.
Definition 3.1 (Common Subgraph (CSG), CSG Isomorphismus). Seien G1 und
G2 Graphen. Ein Graph G wird Common Subgraph (CSG) von G1 und G2 genannt, wenn
G isomorph zu Teilgraphen G01 und G02 von G1 und G2 ist [19]. Ein Graph G wird Common Induced Subgraph (CISG) von G1 und G2 genannt, wenn G isomorph zu induzierten
Teilgraphen G01 und G02 von G1 und G2 ist [11]. Ein maximaler CSG bzw. CISG ist in
keinem anderen CSG bzw. CISG von G1 und G2 enthalten [17]. Ein Maximum CISG ist
ein CISG mit höchstmöglicher Knotenanzahl [11]. Falls nur Graphen G gesucht werden,
die zusammenhängen, wird dies mit connected bezeichnet und mit einem vorangestellten
C abgekürzt. Beispielsweise ist ein CCISG ein Connected Common Induced Subgraph. Ein
zugehöriger Isomorphismus ϕ : V (G01 ) → V (G02 ) wird durch ein nachgestelltes I gekennzeichnet, analog zu den CSTI.
Auf den gegebenen Graphen kann zusätzlich eine Labelfunktion definiert werden (vgl.
Definition 2.12). In diesem Fall muss dann Isomorphie bezüglich der Label gegeben sein
(vgl. Definition 2.13).
In Zusammenhang mit Enumeration beschränkt sich die Suche gewöhnlich auf maximale CSGI oder CISGI. Um Maximum CISGI zu enumerieren, müsste zunächst die Größe
26
KAPITEL 3. ENUMERATION VON COMMON SUBTREES UND CSTI
bestimmt werden. Das Problem, ob für zwei Graphen und eine natürliche Zahl k ein CISGI
der Mindestgröße k existiert, ist NP-schwer [11]. Entsprechend schwierig ist die Enumeration von Maximum CISGI.
Ein Verfahren, in dem Maximalität nicht vorausgesetzt wird, wird von Levi [19] beschrieben. Dort werden CISGI der Größe k enumeriert, indem Paare von Teilgraphen der
Größe k bestimmt und auf diesen dann Isomorphismen gesucht werden. Dort wird außerdem vorgeschlagen, maximale CISGI mit Hilfe einer Reduzierung auf das Cliquen-Problem
zu finden. Von Koch [17] wird diese Reduzierung für die Enumeration von maximalen
CSGI, CISGI, CCSGI und CCISGI aufgegriffen. Die Transformation findet statt, indem
ein Vertex Product Graph (Definition 3.3) bzw. Edge Product Graph gebildet wird, auf dem
dann maximale Cliquen (Definition 3.2) bzw. maximale c-zusammenhängende Cliquen (Definition 3.4) gesucht werden. Zur Enumeration von Cliquen gibt es viele Algorithmen, der
schnellste und meist genutzte ist der Bron-Kerbosch-Algorithmus [17]. Auf diesem basiert
auch die im Folgenden vorgestellte Enumeration.
Definition 3.2 (Clique [17]). Sei G ein Graph. Ein vollständiger Teilgraph G0 von G
wird Clique genannt. Falls es keinen anderen Clique G00 von G mit G0 ⊂ G00 gibt, wird G
maximale Clique genannt.
In einer Clique sind alle Knoten paarweise miteinander verbunden.
Definition 3.3 (Vertex Product Graph (VPG) [17]). Seien G1 = (V1 , E1 ) und G2 =
(V2 , E2 ) gelabelte Graphen. Der Vertex Product Graph Hv = G1 ◦v G2 = (VH , EH ) ist wie
folgt definiert. In VH sind die Knotenpaare (u, v) aus V1 × V2 enthalten, die das gleiche
Label besitzen. Eine Kante uH vH ∈ EH mit uH = (u1 , u2 ) und vH = (v1 , v2 ) existiert
genau dann, wenn u1 6= v1 und u2 6= v2 und die Kanten u1 v1 und u2 v2 das gleiche Label
haben oder beide nicht vorhanden sind.
Von Levi [19] wurde gezeigt, dass eine maximale Clique, definiert durch die Knoten
(u1 , v1 ), . . . , (uk , vk ) in Hv , einem maximalen CISGI von G1 und G2 entspricht. Der Isomorphismus ist dabei durch ϕ(ui ) = vi für i ∈ {1, . . . , k} gegeben. Die Enumeration aller
maximalen CISGI kann somit auf die Enumeration aller Cliquen auf dem VPG zurückgeführt werden. Von Koch [17] wird außerdem noch der Edge Product Graph definiert, der
bei der Enumeration von maximalen CSGI behilflich ist. Maximale CCSGI und CCISGI
korrespondieren zu maximalen c-zusammenhängenden Cliquen im entsprechenden Produktgraphen [17].
In Abschnitt 3.2.1 wird der Algorithmus zur Enumeration von maximalen CCISGI von
Cazals und Karande [7], basierend auf der Enumeration von maximalen CCISGI von Koch
[17], beschrieben. Für zwei Bäume T1 und T2 entspricht die Enumeration aller maximalen
CCISGI auf dem zugehörigen VPG der Enumeration aller maximalen CSTI, denn Teilbäume sind insbesondere induzierte zusammenhängende Teilgraphen eines Baumes. Der
3.2. VERWANDTE ARBEITEN
27
in [7] beschriebene Algorithmus wurde im Rahmen dieser Arbeit implementiert. In Abschnitt 4.1 erfolgt ein Vergleich der Laufzeiten zwischen dem allgemeineren Algorithmus
zur Enumeration von maximalen CCISGI, mit Bäumen als Eingabe, und einem auf Bäume
spezialisierten Algorithmus zur Enumeration aller maximalen CSTI, der in Abschnitt 3.4.1
vorgestellt wird.
3.2.1
Enumeration von maximalen CCISGI
Sei G = (V, E) ein gelabelter Graph mit Kantenbezeichnern (vgl. Definition 2.12) und
Σ = {c, d}. Der Graph G sei dabei als VPG aus zwei ungelabelten1 Graphen G1 und G2
entstanden. Eine Kante uv ∈ E mit u = (u1 , u2 ) und v = (v1 , v2 ), für die u1 v1 ∈
/ E(G1 )
und u2 v2 ∈
/ E(G2 ) gilt, bekommt den Bezeichner d für disconnected. Ansonsten bekommt
die Kante den Bezeichner c für connected. Im ersten Fall sind jeweils die beiden Knoten
aus V (G1 ) und V (G2 ) nicht miteinander verbunden, im zweiten Fall sind sie verbunden.
Kanten mit Bezeichner c bzw. d werden c-Kanten bzw. d-Kanten genannt.
Definition 3.4 (c-zusammenhängende Clique [7]). Eine über c-Kanten verbundene
Clique ist eine c-zusammenhängende Clique.
Die Idee zur Enumeration der maximalen CCISGI besteht darin, maximale c-zusammenhängende Cliquen zu enumerieren. Maximale Cliquen entsprechen einem maximalen CISGI von G1 und G2 . Die Eigenschaft des c-Zusammenhangs garantiert, dass der maximale
CISGI zusammenhängend ist. Im Folgenden wird der Algorithmus zur Enumeration aller
maximalen c-zusammenhängende Cliquen beschrieben.
Der Algorithmus startet jeweils nacheinander in jedem Knoten ui des Graphen. Dieser
wird in der Menge R gespeichert. In der Menge R sind die Knoten der Clique, die gerade
erweitert wird. In der Menge P sind die Knoten enthalten, durch die R erweitert werden
kann. Für jeden Knoten aus P gilt, dass dieser mit allen Knoten aus R über eine c- oder
eine d-Kante verbunden ist. Dabei muss mindestens eine dieser Verbindungen eine c-Kante
sein. Dies stellt sicher, dass R nach der Hinzunahme eines Knotens aus P weiterhin eine
c-zusammenhängende Clique ist. Zu Beginn sind folglich in P alle Knoten gespeichert, die
mit ui über eine c-Kante verbunden sind. Die Knoten aus P werden dann nacheinander
zur Menge R hinzugefügt. Für jede Hinzunahme beginnt eine neue Rekursion, die die
folgenden Knoten, wieder rekursiv, hinzunimmt. Auf diese Weise werden alle möglichen
Kombinationen von Knoten aus P zu R hinzugenommen. Somit wird keine maximale czusammenhängende Clique vergessen und dementsprechend alle aufgezählt.
In der Menge Q sind Knoten gespeichert, die zu allen Knoten aus R ausschließlich über
d-Kanten verbunden sind. Zu Beginn sind das genau die Knoten, die mit ui über eine dKanten verbunden sind. Wenn R um einen Knoten ui erweitert wird, können alle Knoten
1
Dies hat keinen Einfluss auf den Algorithmus und betrifft nur die Konstruktion des VPG.
28
KAPITEL 3. ENUMERATION VON COMMON SUBTREES UND CSTI
uj ∈ Q, die über eine c-Kante mit ui verbunden sind, in die Menge P verschoben werden.
Die Knoten aus R bilden mit uj eine Clique, die wegen der c-Kante zwischen ui und uj
dann auch eine c-zusammenhängende Clique ist.
Immer dann, wenn R um einen Knoten ui erweitert wird, müssen alle Knoten aus P
und Q gelöscht werden, die nicht mit ui verbunden sind. Denn diese Knoten bilden dann
mit den Knoten aus R keine Clique mehr, so dass R nicht mehr um diese Knoten erweitert
werden kann.
Um Cliquen nicht mehrfach aufzuzählen, beispielsweise, wenn in einer Rekursion (a)
zuerst u2 , dann u3 und in einer anderen Rekursion (b) erst u3 , dann u2 hinzugenommen
wird, gibt es Mengen von verbotenen Knoten. In diesen wird gespeichert, welche Knoten
bereits besucht und abgearbeitet wurden. In dem obigen Beispiel würde vor der Hinzunahme von u3 in der Rekursion (b) der Knoten u2 in die Menge der verbotenen Knoten
verschoben werden werden und steht dann in der Rekursion (b) nicht mehr zur Verfügung.
In [7] ist der Algorithmus in Pseudocode angegeben.
3.2.2
Enumeration von Maximum Weight Bipartite Matchings
In Abschnitt 2.4.1 wurde beschrieben, wie das Gewicht eines MaxWBM’ auf einem vollständigen bipartiten Graphen bestimmt werden kann. Dazu wurden alle maximalen Matchings
enumeriert und dabei jeweils das größte Gewicht gespeichert. Dieser Algorithmus kann so
modifiziert werden, dass er im ersten Durchlauf die Größe eines MaxWBM’ bestimmt und
im zweiten Durchlauf genau die Matchings ausgibt, die dieses Gewicht haben. Somit ist ein
einfacher Enumerationsalgorithmus für alle MaxWBM in einem vollständigen bipartiten
Graphen gegeben. Wenn der relative Anteil der MaxWBM’ bezogen auf alle maximalen
Matchings nicht zu klein ist, der Graph wenig Knoten hat oder der Knotengrad allgemein beschränkt ist, können MaxWBM’ auf diese Weise effizient enumeriert werden. Die
in Abschnitt 2.4.1 angegebene Laufzeit gilt auch für die Enumeration aller MaxWBM’.
Eine Möglichkeit, MaxWBM (in einem nicht notwendig vollständigen bipartiten Graphen) zu enumerieren, wird im Folgenden beschrieben. Dabei werden Ergebnisse von Fukuda und Matsui [13], Kuhn [18] und Uno [27] miteinander kombiniert, um einen polynomialdelay-Algorithmus für die Enumeration aller MaxWBM zu erhalten.
Sei G0 = (V 0 ∪ X 0 , E 0 ) ein vollständiger bipartiter Graph mit Kantengewichten, wie
diese im Algorithmus von Edmonds konstruiert werden. Nach Abschnitt 2.4.2 lässt sich
daraus ein Graph G = (V ∪ X, E) mit |V | = |X| = max{|V 0 |, |X 0 |} konstruieren, indem
Kanten mit Gewicht 0 hinzugenommen werden. In Abschnitt 2.4.2 wurde außerdem der
zulässige Teilgraph G(y) für einen Lösungsvektor y des dualen Programms (D) vorgestellt.
Für eine optimale Lösung y ∗ hat nach Satz 2.25 ein perfektes Matching M in G maximales
Gewicht genau dann, wenn M ⊆ E(y ∗ ). Von Uno [27] wird beschrieben, wie alle perfekten
Matchings in einem bipartiten Graphen ohne Gewichtsfunktion enumeriert werden können.
3.2. VERWANDTE ARBEITEN
29
Anstelle von perfekten Matchings maximalen Gewichts in G können perfekte Matchings
in G(y ∗ ) enumeriert werden [13]. Der Enumerationsalgorithmus von Uno [27] für perfekte
Matchings wird im Folgenden vorgestellt. Anschließend wird noch die nötige Modifikation
beschrieben, um MaxWBM im Graphen G0 , der ein Teilgraph von G ist, zu erhalten.
Definition 3.5 (Alternierender Kreis [27]). Sei M ein Matching in einem bipartiten Graphen G = (V ∪ X, E) und K ein durch VK := {v1 , x1 , . . . , vk , xk } und EK :=
{v1 x1 , x1 v2 , v2 x2 , . . . , xk−1 vk , vk xk , xk v1 } definierter Kreis in G. Wenn die Kanten vi xi ∈ M
für alle i ∈ {1, . . . , k} sind, wird dieser Kreis alternierender Kreis genannt.
Jeder alternierender Kreis K besteht abwechselnd aus zum Matching gehörenden Kanten
und nicht zum Matching gehörenden Kanten. Außerdem sind alle Knoten aus VK paarweise verschieden. Beides folgt daraus, dass M ein Matching ist. Wenn zu einem gegebenen
perfekten Matching die Kanten entlang eines alternierenden Kreises ausgetauscht werden,
entsteht ein anderes perfektes Matching. In einem bipartiten Graphen besteht die symmetrische Differenz zwischen zwei perfekten Matchings aus alternierenden Kreisen. In einem
bipartiten Graphen mit perfektem Matching gibt es also genau dann ein anderes perfektes
Matching, wenn es einen alternierenden Kreis gibt [27]. Genau diese Eigenschaft wird im
rekursiven Algorithmus von Uno genutzt.
Zunächst sucht der Algorithmus von Uno ein perfektes Matching im gegebenen Graphen. Dieser Schritt kann im Rahmen dieser Arbeit entfallen, denn nach Abschnitt 2.4.1
liefert die Konstruktion des zulässigen Teilgraphen G(y) ein perfektes Matching M . Dieses
wird als erstes Matching ausgegeben. Dann wird die Rekursion auf G(y) und M begonnen.
In jedem Rekursionsaufruf wird ein alternierender Kreis gesucht. Dazu wird der Graph
gerichtet, indem die Matchingkanten von V zu X zeigen und die anderen Kanten von X
zu V . Mit Tiefensuche kann dann ein alternierender Kreis gefunden werden, falls dieser
existiert. Falls kein Kreis gefunden wird, gibt es kein weiteres perfektes Matching und die
Rekursion stoppt. Ansonsten werden die Kanten entlang des alternierenden Kreises ausgetauscht und es entsteht ein neues perfektes Matching M 0 . Dieses wird ausgegeben. Anschließend wird eine Kante e = vx gewählt, die zu M und zum alternierenden Kreis gehört.
Diese Kante gehört somit nicht zu M 0 . Daraus werden zwei Teilprobleme zur Enumeration aller perfekten Matchings auf dem gegebenen Graphen generiert. Das eine Teilproblem
umfasst die Matchings, in denen e enthalten ist. Das andere umfasst die Matchings, in
denen e nicht enthalten ist.
Dazu werden zwei neue Graphen generiert, die mit G+ (e) und G− (e) bezeichnet werden.
In G+ (e) werden v und x und alle dazu inzidenten Kanten entfernt. Nach Uno beinhalten
alle perfekten Matchings in G+ (e) die Kante e. In G− (e) wird die Kante e entfernt. Damit
existiert in G− (e) kein Matching, dass e enthält. Es folgen zwei rekursive Aufrufe, einer auf
dem Graphen G+ (e) mit dem Matching M \ e, und einer auf dem Graphen G− (e) mit dem
Matching M 0 . In Abbildung 3.2 ist zum einen ein Graph mit einem Matching M , einem
30
KAPITEL 3. ENUMERATION VON COMMON SUBTREES UND CSTI
v
e
M
K
G+(e)
G (e)
_
v
v
e
M
e
M'
Abbildung 3.2: Teilprobleme im Algorithmus von Uno [27]
alternierenden Kreis (gestrichelte Linien) und der Kante e dargestellt, zum anderen die sich
daraus ergebenden Graphen G+ (e) mit dem Matching M und G− (e) mit dem Matching
M 0 . Die gelöschten Knoten und Kanten sind jeweils mit helleren Farbwerten dargestellt.
Die Angaben in [27] in Bezug auf G+ (e) sind widersprüchlich. Im dort angegebenen
Pseudocode erfolgt der Aufruf auf dem Graphen G+ (e) mit dem Matching M . Die Kante
e soll einerseits in allen perfekten Matchings in G+ (e) enthalten sein. Andererseits ist die
Kante e nicht Teil des Graphen G+ (e). In der dieser Arbeit beiliegenden Implementierung
wird vermerkt, dass die Kante e fest zu allen weiteren Matchings in der Rekursion auf
G+ (e) gehört. Bei der Enumeration der Matchings werden diese vermerkten Kanten dann
hinzugefügt. Auf diese Weise werden alle perfekten Matchings korrekt aufgezählt.
Der nötige Speicherplatzverbrauch liegt nach Uno bei O(m), wobei m der Anzahl der
Kanten des bipartiten Graphen entspricht. Dazu wird bei einem Rekursionsaufruf nicht
der Graph G+ (e) bzw. G− (e) übergeben, sondern die gelöschten Kanten.
Die Geschwindigkeit des Algorithmus wird auf zwei Arten gesteigert. Vor der Bestimmung eines Kreises werden alle Kanten entfernt, die zu keinem Kreis gehören. Diese lassen
sich mit Hilfe einer Zerlegung des gerichteten Graphen in starke Zusammenhangskomponenten finden. Kanten, die zu keiner starken Zusammenhangskomponente gehören, werden
gelöscht, da sie keinem Kreis angehören. Matchingkanten, die auf diese Weise gelöscht
werden, werden entsprechend vermerkt, dass sie Teil aller weiteren Matchings in dieser Rekursion sind. Die andere Art betrifft die Wahl der Kante e. Wenn diese geschickt gewählt
wird, wird eine Gesamtlaufzeit von O(nNm ) bewiesen, wenn das erste Matching gegeben
ist. Dabei ist n durch die Zahl der Knoten und Nm durch die Anzahl der perfekten Matchings definiert. Falls das erste Matching nicht gegeben ist, kann es in polynomieller Zeit
gefunden werden. Damit fällt der Algorithmus in die Klasse der polynomial-total-timeAlgorithmen. Details zur Wahl von e sowie der Pseudocode des Enumerationsalgorithmus
finden sich in [27]. Der folgende Satz wurde vom Verfasser dieser Arbeit bewiesen.
Satz 3.6. Der Algorithmus von Uno zur Enumeration perfekter Matchings ist ein polynomial-delay-Algorithmus.
3.2. VERWANDTE ARBEITEN
31
Beweis. Im Verlauf des Algorithmus werden immer dann perfekte Matchings ausgegeben,
wenn das Problem in zwei Teilprobleme zerlegt wird. Dies ist genau dann der Fall, wenn ein
alternierender Kreis gefunden wird. Zu jeder Zeit liegen nicht mehr als m Rekursionen auf
dem Stack, wobei m der Anzahl der Kanten von G(y ∗ ) entspricht, denn bei den Graphen
der Teilprobleme wird mindestens eine Kante entfernt. Im schlimmsten Fall wird in keiner
dieser Rekursionen ein Kreis gefunden. Dann allerdings beendet sich der Algorithmus, da
es keine weiteren perfekten Matchings gibt. Jede einzelne der maximal m Rekursionen ist
offensichtlich in polynomieller Zeit möglich.
Im Folgenden wird noch die nötige Modifikation beschrieben, um MaxWBM auf dem
aus dem Algorithmus von Edmonds gegebenen Graphen G0 = (V 0 ∪X 0 , E 0 ) zu enumerieren.
Falls |V 0 | = |X 0 | ist, muss nichts weiter beachtet werden, da in dem Fall G0 und der
nach Abschnitt 2.4.2 konstruierte Graph G = (V ∪ X, E) mit |V | = |X| = max{|V 0 |, |X 0 |}
identisch sind. Sei im Folgenden |V 0 | < |X 0 |. Das Verfahren im Fall |X 0 | < |V 0 | wird analog
durchgeführt. Die Idee liegt darin, Matchingkanten, die zu Knoten aus V \ V 0 := V 00
inzident sind, zu verwerfen, denn Knoten aus V 00 stellen nur Hilfsknoten dar und sind
in den Bäumen der Eingabe nicht vorhanden. Ein enumeriertes perfektes Matching M
in G(y ∗ ) ist ein MaxWBM in G. Das Matching M ∩ E 0 ist ein MaxWBM in G0 , da nur
Matchingkanten mit Gewicht 0 entfernt wurden. Auf diese Weise können alle MaxWBM
in G0 aufgezählt werden.
Problematisch ist, dass mit dieser Modifikation einige MaxWBM mehrfach aufgezählt
werden, wie Abbildung 3.3 zu entnehmen ist. Die in blau dargestellten Knoten sind die
Hilfsknoten aus V 00 . Es gilt M \ E 0 = M 0 \ E 0 , dargestellt durch die roten Kanten zwischen
den schwarzen Knoten. Dieses Problem tritt genau dann auf, wenn der Kreis nur entlang
solcher Matchingkanten verläuft, die zu Hilfsknoten inzident sind. Solche Kreise werden
verboten. Wenn in der aktuellen Rekursion nur noch Matchingkanten vx mit v ∈ V 00
existieren, existieren nur noch solche Kreise. In dem Fall kann die Rekursion abgebrochen
werden. Dies lässt sich in Zeit O(1) feststellen, wenn die Anzahl dieser Kanten in einer
Variablen gespeichert wird. Ansonsten gibt es mindestens einen alternierenden Kreis mit
einer Matchingkante, die zu einem Knoten v ∈ V 0 inzident ist, denn alle Kanten des
aktuell gegebenen Graphen gehören zu einem alternierenden Kreis. Wenn die Suche nach
einem alternierenden Kreis K bei einem Knoten v ∈ V 0 beginnt, ist die mit v verbundene
Matchingkante Teil des Kreises. Das Matching M 0 , das nach Austausch der Kanten entlang
des Kreises berechnet wurde, unterscheidet sich damit bezüglich G0 von dem vorherigen
Matching M . Insgesamt ergibt sich daraus, dass kein Matching mehrmals enumeriert wird.
Die Laufzeit im Algorithmus von Uno [27] ergibt sich aus der Summe |E(Gx )|+|V (Gx )|
über alle Rekursionen x. Im Beweis wird gezeigt, dass der Durchschnitt aller |E(Gx )|
durch O(n) beschränkt ist. Dazu wird eine Kostenanalyse durchgeführt und die Kosten
|E(Gx )| auf die nachfolgenden Rekursionsaufrufe verteilt. Wegen der obigen Modifikation
32
KAPITEL 3. ENUMERATION VON COMMON SUBTREES UND CSTI
G (e)
_
e
M
M'
e
K
Abbildung 3.3: Identische Matchings in Bezug auf G0
SZHK
M
M
Abbildung 3.4: Abbruch der Rekursion, Matchingkanten sind nur noch zu Hilfsknoten inzident
und des Abbruchs, wenn nur noch zu Hilfsknoten inzidente Matchingkanten existieren,
können die Kosten somit nicht mehr auf die Rekursionen verteilt werden, die wegen des
Abbruchs nicht mehr stattfinden. In Abbildung 3.4 existieren nach der Entfernung der
Knoten und Kanten, die zu keinem Kreis gehören, nur noch Matchingkanten, die mit
Hilfsknoten verbunden sind. Es gibt folglich keine weitere Rekursion und insgesamt nur ein
perfektes Matching in Bezug auf G0 . Ein allgemeines Beispiel ist ein zulässiger Teilgraph
G(y ∗ ) = (({v} ∪ V 00 ) ∪ ({x} ∪ X), {vx} ∪ V 00 × X) Dort existiert nur ein perfektes Matching
in Bezug auf G0 , die Laufzeit beträgt dennoch O(n2 ), wobei n der Knotenanzahl entspricht.
Satz 3.7. Der auf dem Algorithmus von Uno [27] basierende und in diesem Abschnitt vorgestellte Algorithmus zur Enumeration von MaxWBM ist ein polynomial-delay-Algorithmus.
Die Laufzeit ist bei gegebenem ersten perfekten Matching M durch O(n2 Nm ) beschränkt.
Der zusätzliche Speicherverbrauch ist durch O(m) beschränkt.
3.3
Enumeration von Maximum CSTI
In diesem Abschnitt wird ein im Rahmen dieser Arbeit entwickelter Enumerationsalgorithmus für Maximum Common Subtree Isomorphismen vorgestellt. Als Eingabe dienen
zwei Bäume R = (VR , ER ) und S = (VS , ES ). Wenn mindestens ein Baum höchstens einen
Knoten hat, sind die Lösungen trivial - entweder ist der einzige Maximum CSTI die leere
Abbildung ϕ : ∅ → ∅, wenn einer der Bäume leer ist, oder die Isomorphismen bilden den
Knoten des Baumes, der nur einen Knoten beinhaltet, auf jeweils einen Knoten des anderen Baumes ab. Dies kann durch eine einfache Fallunterscheidungen zu Beginn geprüft
werden. Im Folgenden werden die trivialen Fälle nicht mehr besprochen. Stattdessen wird
vorausgesetzt, dass R und S jeweils aus mindestens zwei Knoten bestehen.
Der Enumerationsalgorithmus für die Maximum Common Subtree Isomorphismen basiert auf dem Algorithmus von Edmonds [21]. Die dort vorgestellten gewurzelten Teilbäume
(siehe Definition 2.15) bilden den Ausgangspunkt für die Enumeration. Die Grundidee ist
3.3. ENUMERATION VON MAXIMUM COMMON SUBTREE ISOMORPHISMEN 33
Eingabe: Zwei Bäume R und S
Ausgabe: Alle Maximum Common Subtree Isomorphismen von R und S
1:
m ← SizeMCSTI(R, S) // Algorithmus 2.2
2:
for all r ∈ RSTR mit I(r) < I(r) do
3:
4:
for all s ∈ RSTS do
if D(r, s) + D(r, s) = m // alle Werte für D wurden in Zeile 1 berechnet then
5:
for all Maximum CSTI ϕ1 von (r, s) // Wurzelknoten aufeinander abbilden do
6:
for all Maximum CSTI ϕ2 von (r, s) // Wurzelknoten aufeinander abb. do
Verbinde die Isomorphismen ϕ1 und ϕ2 der gewurzelten Teilbäume zu einem
7:
Maximum CSTI ϕ von R und S.
Gebe ϕ aus, falls ϕ bisher nicht gefunden wurde.
8:
end for
9:
10:
11:
12:
13:
end for
end if
end for
end for
Algorithmus 3.1: EnumMaximumCSTI(R, S)
es, für alle Paare (uv ∈ ER , xw ∈ ES ) von Kanten den CSTI zunächst durch ϕ(u) = x und
ϕ(v) = w beziehungsweise ϕ(u) = w und ϕ(v) = x zu definieren. Falls sich dieser CSTI zu
einem Maximum CSTI erweitern lässt, werden sukzessive Knoten hinzugenommen, solange
diese nicht die Erweiterung zu einem Maximum CSTI verhindern. Das lässt sich mit Algorithmus 2.1 (GetD) feststellen. Die Enumeration besteht darin, alle Möglichkeiten, Knoten
zu ϕ hinzuzufügen, systematisch so zu durchlaufen, dass alle Maximum CSTI genau einmal
gefunden werden. Die nötigen Formalisierungen werden im Folgenden beschrieben.
0 der gerichteten Kanten definiert durch
Zur Kantenmengen ER wird die Menge ER
0 := {(u, v), (v, u) | uv ∈ E }. Die Kantenmenge E 0 ist analog definiert. Die Menge
ER
R
S
0 } definiert, entder gewurzelten Teilbäume RSTR wird durch RSTR := {Rvu | (u, v) ∈ ER
sprechendes gilt für RSTS . Für einen gewurzelten Teilbaum t = Tvu mit T ∈ {R, S} sei
t := Tuv der durch die andere Zusammenhangskomponente definierte gewurzelte Teilbaum.
Außerdem wird eine bijektive Abbildung I : RSTR → {1, 2, . . . , |RSTR |} definiert, die im
Folgenden mit Ordnungsfunktion bezeichnet wird. Für I gelten gewisse Einschränkungen,
die in Abschnitt 3.3.2 diskutiert werden. Mit Hilfe der Ordnungsfunktion wird sichergestellt, dass derselbe Isomorphismus nicht mehrmals ausgegeben wird.
Im Hauptalgorithmus 3.1 (EnumMaximumCSTI), Zeile 2 bis 4, werden alle Paare (r, s)
von gewurzelten Teilbäumen gesucht, für die ein Maximum CSTI existieren kann, wie dies
in Abschnitt 2.2.3 beschrieben wurde. Das sind genau die Paare, für die in Algorithmus 2.2
(SizeMCSTI, Zeile 8) m = GetD(Rvu , Sxw ) + GetD(Ruv , Swx ) gilt. Die Voraussetzung I(r) <
34
KAPITEL 3. ENUMERATION VON COMMON SUBTREES UND CSTI
I(r) wird in Abschnitt 3.3.2 besprochen. Anschließend werden alle Maximum CSTI von
(r, s) enumeriert und diese nacheinander mit allen Maximum CSTI von (r, s) verbunden
(Zeile 5 bis 7). Verbinden bedeutet dabei, dass in ϕ genau die Zuordnungen aus ϕ1 und
ϕ2 enthalten sind. In diesen Isomorphismen werden die Wurzelknoten jeweils aufeinander
abgebildet, wie in Abschnitt 2.2.3 beschrieben. Der genaue Ablauf in Zeile 5 und 6 wird
in Abschnitt 3.3.1 vorgestellt. Warum Lösungen überhaupt mehrmals gefunden werden
und wie sichergestellt wird, dass diese nur einmal ausgegeben werden (Zeile 8), wird in
Abschnitt 3.3.2 beschrieben.
3.3.1
Enumeration von Maximum CSTI auf gewurzelten Bäumen
In diesem Abschnitt wird ein Verfahren beschrieben, wie in Zeile 5 und 6 von Algorithmus
3.1 die Maximum CSTI aufgezählt werden können. Das Verfahren lässt sich auf beliebigen Paaren von gewurzelten Teilbäumen anwenden, insbesondere auf (r, s) und (r, s) aus
Algorithmus 3.1.
Sei (r, s) = (Rvu , Sxw ) ein beliebiges Paar von gewurzelten Teilbäumen, auf dem alle
Maximum CSTI aufgezählt werden sollen. Aus dem Algorithmus von Edmonds ist bekannt, dass sich die Größe eines Maximum CSTI mit Hilfe von Maximum Weight Bipartite
Matchings berechnen lässt. Konkret wird dort zu zwei gewurzelten Bäumen ein bipartiter
Graph erstellt, auf dem dann das Gewicht eines MaxWBM bestimmt wird. Das Verfahren
wurde in Abschnitt 2.2.2 vorgestellt. Die Matchingkanten entsprechen dabei den Zuordnungen der Kinder von v und w.
Die Idee zur Enumeration der Maximum CSTI auf (r, s) besteht darin, die Menge
M aller Maximum CSTI von r und s mit ϕ(v) = x disjunkt in Mengen M1 , . . . , Mm zu
zerlegen, in denen jeweils weitere Vorgaben für ϕ existieren, und für diese Mengen dann
jeweils alle Maximum CSTI aufzuzählen. Bei den Teilmengen Mi wird das Verfahren dann
rekursiv angewendet. Das genaue Vorgehen wird im Folgenden beschrieben. Dabei meint
der Begriff „Rekursionsebene“ die aktuelle Ebene oder Tiefe der Rekursion, in der sich der
Algorithmus befindet, und steht jeweils für ein Paar von gewurzelten Teilbäumen.
Falls v oder x keine Kinder hat, gibt es nur eine Lösung, und zwar ϕ(v) = x. In diesem
Fall ist keine Rekursion erforderlich. Voraussetzung ist im Folgenden, dass v und x Kinder
haben. Seien V := {v1 , v2 , . . . , vk } und X := {x1 , x2 , . . . , xl } diese Kinder. Außerdem
sei k ≤ l vorausgesetzt. Ansonsten können für die Berechnung die Rollen von V und
X vertauscht werden, wie dies in Abschnitt 2.4 durchgeführt wurde. Auf dem bipartiten
Graphen G = (V ∪ X, V × X) mit Kantengewichten, wie in Abschnitt 2.2.2 beschrieben, sei
M := {M1 , . . . , Mm } die Menge aller MaxWBM. Wie diese Matchings enumeriert werden
(i)
(i)
(i)
können, wurde in Abschnitt 3.2.2 beschrieben. Sei Mi = {v1 x1 , v2 x2 , . . . , vk xk } das i-te
(i)
enumerierte Matching mit xj ∈ X. Für alle i ∈ {1, 2, . . . , m} werden der Menge Mi dann
(i)
alle Isomorphismen mit ϕ(v) = w sowie ϕ(vj ) = xj für j ∈ {1, 2, . . . , k} zugeordnet. Die
3.3. ENUMERATION VON MAXIMUM COMMON SUBTREE ISOMORPHISMEN 35
u
w
v
x
v1
v3
v4
x2
x1
v2
v5
x4
x5
x3
x6
x7
Abbildung 3.5: Beispiel zur Enumeration auf zwei gewurzelten Teilbäumen
Enumeration aller Maximum CSTI auf (r, s) entspricht somit der aufeinanderfolgenden
Enumeration aller Maximum CSTI aus M1 bis Mm . Die Enumeration auf den Mengen Mi
läuft wie folgt ab.
(i)
Sei ϕ(v) = x und ϕ(vj ) = xj := xj für j ∈ {1, . . . , k} die Festlegung von ϕ in Mi . Sei
M0j die Menge aller Maximum CSTI auf dem Paar (Rvvj , Sxxj ) von gewurzelten Teilbäumen.
Q
In Mi sind genau j=1,2,...,k |M0j | verschiedene Maximum CSTI für das Paar (Rvu , Swx ) von
gewurzelten Teilbäumen enthalten. Das sind genau die Isomorphismen, die die Vorgaben
von Mi an ϕ erfüllen. Diese lassen sich enumerieren, indem alle Kombinationen von Isomorphismen aus M01 bis M0k miteinander und mit ϕ verbunden werden. Diese Kombinationen
können durch Enumeration der Maximum CSTI auf den Mengen M0j gebildet werden. An
dieser Stelle erfolgt der rekursive Aufruf, denn dabei handelt es sich um die Enumeration aller Maximum CSTI auf einem Paar von gewurzelten Teilbäumen. Der Aufruf auf
(Rvvj , Sxxj ) erfolgt allerdings nur dann, wenn beide Teilbäume Rvvj und Sxxj Kinder haben.
Ansonsten kann der Isomorphismus über diese Rekursion nicht mehr erweitert werden.
Die Kombinationen der Maximum CSTI aus den Mengen M01 bis M0k , also der Maximum CSTI auf den Paaren (Rvv1 , Sxx1 ) bis (Rvvk , Sxxk ) von gewurzelten Teilbäumen, lassen
sich beispielsweise bilden, indem zunächst aus jeder Menge der erste Maximum CSTI berechnet wird. Anschließend werden alle Isomorphismen in M0k enumeriert. Danach wird der
zweite Isomorphismus in M0k−1 enumeriert, anschließend wieder alle Isomorphismen aus M0k
usw. Die letzte Kombination wurde bestimmt, wenn in den Mengen M01 bis M0k jeweils der
letzte Isomorphismus enumeriert wurde. Aufgrund der Tatsache, dass immer wieder auf
den gleichen Mengen enumeriert wird, bietet es sich an, die MaxWBM nach der ersten Berechnung in einer geeigneten Datenstruktur zu speichern. Zu beachten ist, dass die Anzahl
der MaxWBM für einen bipartiten Graphen im Allgemeinen nicht polynomiell beschränkt
ist. Es sollte also eine Obergrenze für die Anzahl der zu speichernden MaxWBM festgelegt
werden.
Die Enumeration aller Maximum CSTI zweier gewurzelter Teilbäume wird folgend anhand Abbildung 3.5 illustriert. Es sollen alle Maximum CSTI von (r, s) = (Rvu , Sxw ) enumeriert werden. Zunächst ergibt sich ϕ(v) = x, V := {v1 , v2 } und X := {x1 , x2 , x3 }.
Die Enumeration der MaxWBM erzeuge zunächst das Matching M1 = {v1 x1 , v2 x2 }. Der
36
KAPITEL 3. ENUMERATION VON COMMON SUBTREES UND CSTI
Menge M1 werden also die Maximum CSTI zugeordnet, für die zusätzlich ϕ(v1 ) = x1 und
ϕ(v2 ) = x2 gilt. Anschließend werden diese enumeriert. Dabei ergeben sich die Mengen M01
als die Menge aller Maximum CSTI auf (Rvv1 , Sxx1 ) und M02 als die Menge aller Maximum
CSTI auf (Rvv2 , Sxx2 ). Alle Kombinationen von Isomorphismen aus diesen beiden Mengen
werden nun miteinander und mit ϕ verbunden. Zunächst wird jeweils rekursiv der erste
Isomorphismus aus beiden Mengen bestimmt. Für M01 führt dies zunächst zur Zuordnung
ϕ(v3 ) = x4 . Da mindestens einer der Knoten v3 und x4 keine Kinder hat (in diesem Beispiel
beide), ergibt sich somit insgesamt eine erste Lösung für M01 . Um den ersten Isomorphismus
aus M02 zu erhalten, werden die MaxWBM auf den Kindern von v2 und x2 enumeriert. Das
sei zunächst das Matching {v4 x5 , v5 x6 }, das zur Festlegung von ϕ(v4 ) = x5 und ϕ(v5 ) = x6
führt. Da es keine weiteren Kinder gibt, ist der erste Isomorphismus für M02 vollständig berechnet. Durch Verbindung der Isomorphismen ergibt sich der erste MCSTI ϕ(v) = x,
ϕ(v1 ) = x1 , ϕ(v3 ) = x4 , ϕ(v2 ) = x2 , ϕ(v4 ) = x5 und ϕ(v5 ) = x6 von (r, s). Die nächste Kombination, die gebildet wird, belässt den Isomorphismus aus M01 und enumeriert
den nächsten aus M02 und verbindet diese dann mit ϕ. Dabei ergibt sich ϕ(v4 ) = x6 und
ϕ(v5 ) = x5 , die anderen Zuordnungen von ϕ stimmen mit dem ersten MCSTI überein. Ein
weiterer Isomorphismus auf M02 existiert nicht, weshalb der nächste Isomorphismus aus M01
mit allen Isomorphismen von M02 verbunden werden soll. Aber auch für M01 gibt es keine
Lösung mehr, weshalb alle MCSTI für das MaxWBM M1 aufgezählt worden sind. Das
nächste MaxWBM M2 = {v1 x3 , v2 x2 } der Kinder von v und w führt auf die gleiche Art
zu zwei weiteren Isomorphismen. Da es nur zwei MaxWBM zu den Kindern von v und w
gibt, sind damit alle Maximum CSTI von (r, s) aufgezählt.
Die technische Umsetzung im Programm wurde so realisiert, dass jeder Isomorphismus
ϕ1 bzw. ϕ2 ausgehend von dem Paar (r, s) = (Rvu , Sxw ) bzw. (r, s), das in Zeile 2 und 3
von Algorithmus 3.1 (EnumMaximumCSTI) gewählt wurde, gesucht wird. In Zeile 5 wird
dazu ϕ(v) = x gesetzt und GetMaximumCSTI(r, s, ϕ1 ) (Algorithmus 3.2) aufgerufen. In
Zeile 6 wird entsprechend ϕ(u) = w gesetzt und GetMaximumCSTI(r, s, ϕ2 ) aufgerufen.
Mit Hilfe einer lokalen booleschen Variablen f (f steht für first isomorphism), die zu
Beginn „true“ ist, wird dann der erste bzw. nächste MCSTI auf dem übergebenen Paar von
gewurzelten Teilbäumen bestimmt. Der Rückgabewert ist 1, wenn ein nächster MCSTI
enumeriert werden konnte, und 0, wenn es keinen weiteren mehr gibt. Zu beachten ist,
dass auch in Algorithmus 3.2 alle Parameter als Referenzen übergeben werden.
Im Folgenden sind die einzelnen Schritte von Algorithmus 3.2 zusammengefasst. Falls
bereits ein MCSTI berechnet wurde, wird zunächst versucht, rekursiv die nächste Kombination von MCSTI auf den Kindern zu bestimmen, wie in diesem Abschnitt beschrieben
wurde (Zeile 2). Falls dies erfolgreich war, wurde ein weiterer MCSTI auf (Rvu , Sxw ) enumeriert, und der Wert 1 wird zurückgegeben (Zeile 3 bis 5). In Zeile 7 können zwei verschiedene
Situationen vorliegen. Falls noch kein MCSTI bestimmt wurde, dann muss das erste MaxWBM bestimmt werden (Zeile 9). Dabei wird ϕ entsprechend festgelegt. Ansonsten wurde
3.3. ENUMERATION VON MAXIMUM COMMON SUBTREE ISOMORPHISMEN 37
Eingabe: Referenzen auf Rvu , Sxw und ϕ
Ausgabe: 1, falls ein weiterer Isomorphismus aufgezählt werden konnte; 0, sonst
1:
if f = false // Es wird nicht der erste MCSTI auf Rvu , Sxw berechnet then
2:
Berechne die nächste Kombination von MCSTI auf M01 bis M0k
3:
if es gibt eine weitere Kombination then
return 1
4:
5:
end if
6:
end if
7:
if f = true // Bisher noch kein MCSTI auf Rvu , Sxw bestimmt then
8:
f ← false
9:
Berechne erstes MaxWBM und erweitere ϕ um die durch das Matching bestimmte
Zuordnung der Kinder
10:
11:
else
// Alle Kombinationen auf letztem Matching wurden aufgezählt
Berechne nächstes MaxWBM, verändere ϕ entsprechend
12:
if es gab kein nächstes MaxWBM, da bereits alle enumeriert wurden then
13:
f ← true // Es gibt keinen weiteren MCSTI auf Rvu , Sxw
14:
return 0
15:
end if
16:
end if
17:
Berechne die erste Kombination von MCSTI auf M01 bis M0k
18:
return 1
Algorithmus 3.2: GetMaximumCSTI(Rvu , Sxw , ϕ)
in Zeile 2 keine weitere Kombination gefunden. Das bedeutet, auf dem Paar (Rvv1 , Sxx1 )
konnte kein weiterer Isomorphismus generiert werden. Einer von zwei möglichen Gründen
ist, dass v1 oder x1 ein Blatt ist. Der andere mögliche Grund ist, dass der rekursive Aufruf von GetMaximumCSTI(Rvv1 , Sxx1 , ϕ), der in Zeile 2 erfolgt, aber im Algorithmus nicht
explizit dargestellt ist, in diesem Abschnitt allerdings beschrieben wurde, den Wert 0 zurückliefert hat. In diesem Fall muss dann das nächste MaxWBM bestimmt werden, und
ϕ entsprechend verändert werden (Zeile 11). Falls es kein weiteres Matching mehr gab,
können auch keine weiteren MCSTI aufgezählt werden. In diesem Fall wird f auf „true“
gesetzt (Zeile 12-15), damit beim nächsten Aufruf wieder mit der Enumeration des ersten
MCSTI begonnen wird. In Zeile 17, die erreicht wird, wenn das erste oder ein weiteres
Matching bestimmt wurde, wird die erste Kombination von Maximum Common Subtree
Isomorphismen auf M01 bis M0k berechnet. Hier erfolgen rekursive Aufrufe von GetMaximumCSTI auf den bis zu k Kind-Paaren (Rvvi , Sxxi ), in denen vi und xi keine Blätter sind,
und die den Mengen M01 bis M0k entsprechen.
38
KAPITEL 3. ENUMERATION VON COMMON SUBTREES UND CSTI
r5
s2
4
5 r
4
3
r3
8
6
1
7 r
2
5
r1 9
r2
10
s1
s3
s4
s5
Abbildung 3.6: Festlegung der Ordnungsfunktion I in Algorithmus 3.1
3.3.2
Mehrfache Ausgabe gleicher Isomorphismen vermeiden
Wenn in Zeile 2 und 3 von Algorithmus 3.1 die gewurzelten Teilbäume r und s ausgewählt
werden, werden in Zeile 6 die Maximum CSTI von (r, s) enumeriert und mit den Maximum
CSTI von (r, s) (Zeile 5) verbunden. Ohne die Einschränkung I(r) < I(r) in Zeile 2 würde
die Auswahl von r und s in Zeile 2 und 3 dazu führen, dass in Zeile 6 die Maximum CSTI
von (r, s) = (r, s) aufgezählt würden, so dass in dem Fall genau die gleichen Isomorphismen
bestimmt werden, mit vertauschten Rollen von ϕ1 und ϕ2 .
Die Einschränkung in Zeile 2 ist allein noch unzureichend, bei der Aufzählung identische
Isomorphismen zu vermeiden. Zu den in Abbildung 3.6 dargestellten Bäumen beträgt die
Größe eines MCSTI 5. Der Wert der gerichteten Kante (ri , rj ) in der Abbildung steht
für den Wert I(Rrrji ). Die Festlegung der Ordnungsfunktion I wird im nächsten Abschnitt
behandelt. Wird im Algorithmus (r, s) = (Rrr34 , Sss34 ) gewählt, führt dies zu den (einzigen)
Lösungen ϕ1 (r3 ) = s3 , ϕ1 (r2 ) = s2 , ϕ1 (r1 ) = s1 und ϕ2 (r4 ) = s4 , ϕ2 (r5 ) = s5 . Insgesamt
ergibt sich somit ϕ(ri ) = si für alle i ∈ {1, . . . , 5}. Die Wahl von (r, s) = (Rrr21 , Sss21 ) führt
zu genau dem gleichen Isomorphismus. Gleiches gilt für (r, s) = (Rrr23 , Sss23 ) und (r, s) =
(Rrr45 , Sss45 ). Allgemein gilt, dass ein Maximum CSTI der Größe n mit dem Test in Zeile 2
über n − 1 verschiedene Paare (r, s) von gewurzelten Bäumen gefunden werden kann. Im
Folgenden werden zwei Möglichkeiten vorgestellt, diese identischen Isomorphismen dennoch
nur einmal auszugeben.
(a) Vermeidung identischer Isomorphismen mit Hilfe der Ordnungsfunktion
Die Idee, diese identischen Isomorphismen zu vermeiden, besteht darin, einen dieser Isomorphismen als denjenigen auszuwählen, der ausgegeben werden soll, und die anderen
entsprechend nicht auszugeben.
Sei n + 1 die Größe eines MCSTI ϕ und R := {ri1 , . . . , rin } die Menge der gewurzelten
Teilbäume, durch die ϕ in Algorithmus 3.1, zusammen mit jeweils einem gewurzelten Baum
aus S, enumeriert wird. Da die Ordnungsfunktion I bijektiv ist, gibt es genau ein r ∈ R mit
I(r) = min{I(r0 ) | r0 ∈ R}. Ein berechneter Isomorphismus wird genau dann ausgegeben,
wenn in Zeile 2 genau dieses r gewählt wurde.
Realisieren lässt sich das, indem die Enumeration der Maximum CSTI auf den gewurzelten Bäumen aus Abschnitt 3.3.1 um eine entsprechende Prüfung erweitert wird. Sei dazu
3.3. ENUMERATION VON MAXIMUM COMMON SUBTREE ISOMORPHISMEN 39
M das zuletzt ausgewählte Matching in irgendeiner Rekursionsebene und V 0 := {v 0 ∈ V | v 0
0
ist durch M gematched}. Falls I(r) > I(r0 ) für ein r0 ∈ {Rvv0 , Rvv | v 0 ∈ V 0 } ist, gehört der
bisher berechnete Teil des Maximum CSTI zu einem Isomorphismus, der nicht ausgegeben
wird. In dem Fall findet keine Rekursion statt und das nächste Matching wird gebildet,
das dann auch entsprechend geprüft wird. Falls V und X getauscht wurden, muss dies für
die Tests berücksichtigt werden.
Es gibt Möglichkeiten, die Anzahl dieser Überprüfungen zu verringern. Sollte vor einer
eventuellen Vertauschung von V und X gelten, dass |V | ≤ |X| ist, so werden wegen Satz
2.20 in jedem Fall alle Knoten von V gematched. Wenn nach der Enumeration des ersten
MaxWBM festgestellt wird, dass der derzeit berechnete Isomorphismus nicht ausgegeben
wird, kann auf die weitere Enumeration der Matchings verzichtet werden, denn die Menge
V 0 aus dem vorherigen Absatz ist wegen |V | ≤ |X| für alle weiteren MaxWBM identisch.
Die Rekursion kann auf dieser Ebene folglich abgebrochen werden.
Durch geschickte Festlegung von I kann die Zahl der Vergleiche weiter reduziert werden.
r
Wenn für I zusätzlich gilt, dass I(Rrrji ) = I(Rrij ) ± 1 für benachbarte Knoten ri , rj ist, wie
dies in Abbildung 3.6 dargestellt ist, ist es ausreichend, I(r) < I(r0 ) für r0 ∈ {Rvv0 | v 0 ∈ V 0 }
sicherzustellen. Die Anzahl der Vergleiche kann somit halbiert werden. Die Maximum CSTI
von R und S, die in Abbildung 3.6 entlang der farbigen Knoten enumeriert werden, werden
von der Ordnungsfunktion verworfen, bis auf jener, der vom gewurzelten Teilbaum r = Rrr23
beginnend enumeriert wird. Falls r 6= Rrr23 ist, gibt es jeweils einen gewurzelten Teilbaum
r0 mit I(r0 ) < I(r), der während der Erweiterung des Isomorphismus ausgewählt wird. Die
entsprechenden Rekursionen werden dann abgebrochen.
Bezogen auf Algorithmus 3.2 (GetMaximumCSTI) findet diese Prüfung immer dann
statt, nachdem in Zeilen 9 und 11 ein Matching bestimmt wurde. Falls dann ein r0 mit
I(r0 ) < I(r) existiert, werden sofort weitere MaxWBM enumeriert, bis I(r0 ) > I(r) für
alle r0 ist oder kein weiteres Matchings existiert. Es ist möglich, dass in Zeile 17 für eine
oder mehrere der Mengen M01 bis M0k kein einziger MCSTI existiert, der die Bedingung an
I erfüllt. In diesem Fall wird dann nicht 1 zurückgegeben, sondern der Programmablauf in
Zeile 11 mit der Bestimmung eines nächsten MaxWBM fortgesetzt.
(b) Vermeidung identischer Isomorphismen durch Kantenlöschung
Sei m die Größe eines Maximum CSTI von R und S und r = Rvu der zuletzt gewählte gewurzelte Teilbaum in Zeile 2 von Algorithmus 3.1. Dort wird genau dann ein neuer
gewurzelter Teilbaum gewählt, wenn die Enumeration auf (r, s) für alle gewurzelten Teilbäume s von S abgeschlossen wurde. Insbesondere bedeutet das, dass alle Maximum CSTI
von R und S, in denen gleichzeitig u und v durch ϕ abgebildet werden, enumeriert wurden. Folglich kann die Kante uv aus R gelöscht werden. Der so modifizierte Graph wird
im folgenden mit R0 bezeichnet. Die Löschung der Kante erfolgt zwischen Zeile 12 und
40
KAPITEL 3. ENUMERATION VON COMMON SUBTREES UND CSTI
13 in Algorithmus 3.1. Anschließend werden die in D gespeicherten Werte verworfen, alle gespeicherten MaxWBM gelöscht und m0 ← SizeMCSTI(R0 , S) bestimmt. Das hat zur
Folge, dass der Algorithmus von Edmonds die neuen Größenwerte der Maximum CSTI für
alle Paare von gewurzelten Bäumen sowie für R0 und S neu berechnet. Wenn m0 < m ist,
kann die Enumeration an dieser Stelle beendet werden. Ansonsten werden im Verlauf des
Algorithmus weitere Kanten gelöscht, bis m0 < m erfüllt ist. Alle Maximum CSTI von
R und S, die nach der Kantenlöschung berechnet werden, bilden nicht mehr gleichzeitig
die Knoten u und v durch ϕ ab. Demzufolge unterscheiden sich diese Isomorphismen von
allen zuvor gefundenen Isomorphismen. Die Ordnungsfunktion I wird folglich nicht mehr
benötigt.
Der Baum R mutiert durch die Kantenlöschung zu einem Wald. Für den Algorithmus
von Edmonds stellt das aber kein Problem dar. Voraussetzung für diesen Algorithmus
ist, dass der Graph azyklisch ist. Dies folgt aus der Berechnung von D(r, s), die von den
Blättern aus beginnt. Die Berechnung auf einem Wald ist dagegen identisch mit der aufeinanderfolgenden Berechnung auf den einzelnen Zusammenhangskomponenten.
Nach Satz 2.2.4 liegt die Laufzeit des Algorithmus von Edmonds in der Größenordnung
O(|ER |5 ) für |ER | ≈ |ES |. Die Gesamtrechenzeit der Aufrufe des Algorithmus von Edmonds
wird minimiert, wenn die gewurzelten Bäume r in einer Reihenfolge gewählt werden, die
zu möglichst wenigen Aufrufen des Algorithmus von Edmonds führen. Sei Z im Folgenden
irgendeine größte Zusammenhangskomponente aus R0 . Es ist klar, dass die Größe eines
Maximum CSTI von R0 und S nicht größer als |Z| sein kann. Es bietet sich somit an, r aus
Z zu wählen. Weiterhin ist es hilfreich, r so zu wählen, dass Z nach der Kantenlöschung in
zwei Zusammenhangskomponenten zerfällt, die möglichst gleich groß sind. Dieses Vorgehen
ist natürlich nur eine Heuristik. Beispielsweise sind in dem Baum R aus Abbildung 3.1 alle
Kanten gleichwertig, eine gezielte Auswahl bringt keinen Vorteil gegenüber einer zufälligen
Auswahl. In Abbildung 3.7 ist ein Beispiel dargestellt, wo diese Heuristik sogar nachteilig
wirkt. Die farbig dargestellten Knoten gehören zu jedem Maximum CSTI. Die vorgestellte
Heuristik würde zuerst einen gewurzelten Baum r entlang einer der in rot dargestellten
Kanten wählen. Mit dieser Auswahl werden allerdings nur die Hälfte aller Maximum CSTI
enumeriert und der Algorithmus von Edmonds insgesamt drei mal aufgerufen. Wenn die
Enumeration entlang einer Kante zwischen zwei grünen Knoten startet, führt dies nur zu
einem weiteren Aufruf des Algorithmus von Edmonds. Eine zufällige Auswahl ist in diesem
Beispiel in
1
3
aller Fälle besser.
Sei e = xy die Kante, die gelöscht wird. Eine weitere Verbesserung des Laufzeit lässt
sich erzielen, wenn nur diejenigen Werte D(Rvu , s) verworfen werden, für die x oder y in
V [Rvu ] enthalten ist. Denn wenn weder x noch y darin enthalten sind, kann sich auch der
Wert D(Rvu , s) nicht ändern. Der Zusammenhangskomponente Z sind 2|E(Z)| gewurzelte
Bäume zugeordnet, auf der Hälfe davon wird der in D gespeicherte Wert verworfen. Für
die gelöschte Kante erfolgt natürlich auch keine Berechnung mehr. Die Anzahl der nötigen
3.3. ENUMERATION VON MAXIMUM COMMON SUBTREE ISOMORPHISMEN 41
R
S
Abbildung 3.7: Wahl des gewurzelten Teilbaums r in Algorithmus 3.1 in der Variante „Kanten
löschen“
Neuberechnungen ist somit durch |E(Z)| − 1 beschränkt. Falls MaxWBM gespeichert wurden, wie in Abschnitt 3.3.1 beschrieben, müssen entsprechend nur jene gelöscht werden,
die in Verbindung zu den bipartiten Graphen stehen, für die der Wert in D verworfen wurde. Falls der gewurzelte Teilbaum r zu keinen Maximum CSTI führt, kann die Löschung
der Kante übersprungen werden, da diese dann kein Teil irgendeines Maximum CSTI ist.
Somit muss in diesem Fall D auch nicht aktualisiert werden.
Vergleich der Verfahren
Der Vorteil des Vergleichs mit Hilfe der Ordnungsfunktion I ist, dass dieses Verfahren
zu den in Abschnitt 3.4 vorgestellten Enumerationsvarianten und -kriterien, sowie den
Bezeichnern für Knoten und Kanten aus Abschnitt 3.5 kompatibel ist.
Das Verfahren mit Kantenlöschungen ist zu den Varianten und den Bezeichnern nur
bedingt kompatibel. Die dabei auftretenden Probleme werden in den entsprechenden Abschnitten besprochen. Ein wesentlicher Vorteil ist allerdings, dass der Enumerationsalgorithmus 3.1 mit diesem Verfahren in die Klasse der polynomial-delay-Algorithmen fällt.
In Abschnitt 4.1 erfolgen Laufzeitvergleiche zwischen den beiden Verfahren. Dabei wird
auch die Reihenfolge der Kantenauswahl variiert.
3.3.3
Laufzeit und Speicherverbrauch
Im Folgenden wird die Laufzeit von Algorithmus 3.1 abgeschätzt. Die Größe eines MaxWBM im Algorithmus von Edmonds wird mit dem Verfahren aus Abschnitt 2.4.2 berechnet. Dies liefert den zulässigen Teilgraphen und ein erstes perfektes Matching für die
Enumeration der MaxWBM mit dem Verfahren aus Abschnitt 3.2.2. Mehrfache Lösungen
sollen durch Kantenlöschung vermieden werden. Seien die Bäume R und S gegeben, m die
Größe der MCSTI und Nm die Anzahl der MCSTI.
Die Laufzeit des Algorithmus von Edmonds beträgt O(|ER | · |ES | · max{|ER |, |ES |}3 ),
wie in Satz 2.16 bewiesen wurde. Der Algorithmus kann bis zu |VR | + 1 − m mal wegen
Neuberechnungen von D aufgerufen werden. Ein Beispiel dafür ist ein Graph R wie in
42
KAPITEL 3. ENUMERATION VON COMMON SUBTREES UND CSTI
Abbildung 3.1 gegeben und ein Graph S = ({u, v}, {uv}). Obwohl beim Kantenlöschen
nicht alle D-Werte neu berechnet werden müssen, bleibt der Zeitaufwand in diesem Beispiel
bezüglich O-Notation gleich.
Die MCSTI werden über die Matchings erweitert. Im Folgenden wird abgeschätzt,
wie oft Matchings bestimmt werden müssen und wie viel Zeit dies jeweils benötigt. Die
Anzahl der MaxWBM in jedem Rekursionsschritt hängt von den gegebenen Bäumen R
und S ab. Im worst case ist das jeweils nur ein MaxWBM. Außerdem kann die Struktur
von R und S bedingen, dass jede enumerierte Matchingkante nur zu höchstens einem
MCSTI gehört. Eine Speicherung der MaxWBM bringt dann keinen Vorteil. Ein Beispiel
dazu sind Bäume R und S, wobei R ein Pfad ist und in S nur genau ein Pfad dieser
Länge enthalten ist. Die Zeit zur Bestimmung eines Matchings hängt im Wesentlichen
vom zugehörigen zulässigen Teilgraphen ab. Für einen einzelnen MCSTI sind die Knoten
all dieser zulässigen Teilgraphen, auf denen während der Bestimmung des MCSTI ein
perfektes Matching enumeriert wird, paarweise disjunkt. Sei mi := max{ri , si } die Anzahl
der Kanten des i-ten Matchings, das während der Bestimmung eines MCSTI enumeriert
wird, wobei ri der Anzahl der Knoten aus VR und si der Anzahl der Knoten aus VS
P
entspricht, die in dem zulässigen Teilgraphen enthalten sind. Es gilt
i ri < |VR | und
P
i si < |VS |, wegen der paarweisen Disjunktheit der Knoten in den zulässigen Teilgraphen
und weil zwei Knotenzuordnungen bereits durch die Wahl der gewurzelten Teilbäume (r, s)
festgelegt werden. Nach Abschnitt 3.2.2 beträgt die amortisierte Zeit zur Bestimmung des
P
P
P
oben erwähnten i-ten Matchings O(m2i ). Es gilt i m2i = i max{ri , si }2 = {i|ri >si } ri2 +
P
2
2
2
2
{i|ri ≤si } si < |VR | + |VS | . Die amortisierte Zeit pro MCSTI ist damit durch O(|VR | +
|VS |2 ) beschränkt.
Weil der modifizierte Algorithmus von Uno nach Satz 3.7 ein polynomial-delay-Algorithmus ist, kann jeder MCSTI in polynomieller Zeit bestimmt werden. Der Algorithmus von Edmonds benötigt ebenfalls nur polynomiell viel Zeit und wird nicht häufiger
als |VR | + 2 − m mal aufgerufen. Daraus ergibt sich, dass der vorgestellte Algorithmus
zur Enumeration aller MCSTI ein polynomial-delay-Algorithmus ist. Wenn die zulässigen Teilgraphen über den Lösungsvektor y ∗ gespeichert werden, wird dazu pro Teilgraph
O(|VR | + |VS |) Speicherplatz benötigt. In die selbe Schranke fällt ein initiales perfektes
Matching. Für alle Teilgraphen und initialen Matchings ergibt sich eine Schranke von
O((|VR | + |VS |) · |VR | · |VS |). Der Speicherplatzverbrauch des modifizierten Algorithmus
von Uno ist durch O(|VR | · |VS |) beschränkt. Für ein MCSTI der Größe m ist der Bedarf
durch O(m · |VR | · |VS |) beschränkt. Der Platzbedarf für den Algorithmus von Edmonds ist
nach Satz 2.16 durch O(|VR | · |VS |) beschränkt. Mit m ∈ O(|VR | + |VS |) lässt sich folgendes
Ergebnis ableiten.
Theorem 3.8. Der in Abschnitt 3.3 beschriebene Algorithmus zur Enumeration aller Nm
MCSTI mit Größe m auf zwei Bäumen R und S ist ein polynomial-delay- und polynomial-
3.4. ENUMERATIONSVARIANTEN UND -KRITERIEN
43
space-Algorithmus. Die Gesamtzeit ist durch O(|ER | · |ES | · max{|ER |, |ES |}3 · (|VR | + 2 −
m) + (|VR |2 + |VS |2 ) · Nm ) beschränkt. Der benötigte Speicherbedarf ist durch O((|VR | +
|VS |) · |VR | · |VS |) beschränkt.
3.4
Enumerationsvarianten und -kriterien
Die Enumeration in Abschnitt 3.3 kann aufgefasst werden als Enumeration von Common
Subtree Isomorphismen in der Variante „Maximum“. Ein andere Variante ist die Enumeration aller maximalen CSTI (vgl. Definition 2.11).
Im folgenden Abschnitt 3.4.1 wird beschrieben, wie maximale CSTI enumeriert werden
können. Im darauffolgenden Abschnitt 3.4.2 wird beschrieben, wie alle maximalen CSTI
mit einer vom Benutzer vorgegebene Mindestgröße aufgezählt werden können. Die dort
vorgestellten Algorithmen wurden vom Verfasser dieser Arbeit entwickelt. In Abschnitt
3.4.3 werden ergänzende Kriterien zu den vorgestellten Varianten besprochen.
3.4.1
Maximale Common Subtree Isomorphismen
Die Enumeration von maximalen CSTI (Algorithmus 3.3) ähnelt der Enumeration von Maximum CSTI. Der wesentliche Unterschied liegt darin, dass anstelle von Maximum Weight
Bipartite Matchings alle maximalen Matchings aufgezählt werden. Solch eine Aufzählung
wurde in Abschnitt 3.2.2 beschrieben. Die Aufzählung von maximalen Matchings stellt sicher, dass die sich daraus ergebenden Isomorphismen auch maximal sind. Das ist unmittelbar klar, denn die Erweiterung der Isomorphismen erfolgt über die berechneten Matchings.
Wenn nur maximale, das heißt nicht erweiterbare, Matchings gebildet werden, ist auch der
zugehörige Isomorphismus nicht erweiterbar, also maximal. Dementsprechend entfällt der
Größentest aus Algorithmus 3.1, Zeile 4. Der Aufruf in Zeile 3 und 4 von Algorithmus 3.3
ruft die entsprechende Variante des Algorithmus aus Abschnitt 3.3.1 auf, wobei in diesem
Fall maximale statt Maximum Matchings enumeriert werden. Mit Hilfe der Ordnungsfunktion I wird dabei sichergestellt, dass keine Isomorphismen mehrfach ausgegeben wird, wie
dies in Abschnitt 3.3.2 beschrieben wurde.
Das Verfahren der Kantenlöschung lässt sich nicht übernehmen. Isomorphismen, die
zuvor über eine gelöschte Kante erweitert werden konnten, würden fälschlicherweise als
maximal erkannt werden, wie dies in Abbildung 3.8 zu sehen ist. Die Enumeration über
das Paar (Rrr23 , Sss23 ) führt nach Löschung der Kante e zu dem Isomorphismus ϕ(r2 ) = s2 ,
ϕ(r3 ) = s3 . Dieser Isomorphismus ist, bezogen auf die Bäume der Eingabe, nicht maximal,
denn er lässt sich mit ϕ(r1 ) = s1 erweitern. Im Algorithmus zur Enumeration der Maximum
CSTI stellte dies wegen des Vergleichs mit der Größe eines Maximum CSTI der Bäume
der Eingabe, in denen keine Kanten gelöscht sind, kein Problem dar.
44
KAPITEL 3. ENUMERATION VON COMMON SUBTREES UND CSTI
Eingabe: Zwei Bäume R und S
Ausgabe: Alle maximalen Common Subtree Isomorphismen von R und S
1:
2:
3:
4:
for all r ∈ RSTR mit I(r) < I(r) do
for all s ∈ RSTS do
while GetMaximalCSTI(r, s, ϕ1 ) = 1 // Alg. 3.2 mit maximalen Matchings do
while GetMaximalCSTI(r, s, ϕ2 ) = 1 do
Verbinde die Isomorphismen ϕ1 und ϕ2 der gewurzelten Teilbäume zu einem
5:
maximalen CSTI ϕ von R und S.
Gebe ϕ aus.
6:
7:
8:
9:
10:
end while
end while
end for
end for
Algorithmus 3.3: EnumMaximalCSTI(R, S)
e
r1
r2
s2
r3
s1
s2
s3
s1
r2
s3
r1
r3
Abbildung 3.8: Kantenlöschung in R führt zu nicht maximalen Isomorphismen
Laufzeit und Speicherverbrauch
Die Laufzeit von Algorithmus 3.3 lässt sich wie folgt abschätzen. Seien die Bäume R und
S gegeben, m die Größe eines MCSTI und Nm die Anzahl der CSTI. Mehrfache Lösungen werden mit der Ordnungsfunktion I erkannt. Da maximale CSTI enumeriert werden
sollen, muss der Algorithmus von Edmonds nicht aufgerufen werden. Analog zu Abschnitt
3.3.3 muss im worst case für jede Erweiterung eines CSTI ein neues maximales Matching
enumeriert werden. Die amortisierte Zeit dazu beträgt nach Abschnitt 2.4.1 pro Matching
O(1). Ein CSTI ϕ der Größe k + 1 kann nach Abschnitt 3.3.2 (a) ausgehend von k Paaren
(r, s) gewurzelter Teilbäume gefunden werden. Auch wenn k − 1 davon über die Ordnungsfunktion verworfen werden, muss für diese k −1 CSTI die Zeit mit jeweils O(k) abgeschätzt
werden. Ein Beispiel dazu sind zwei Pfade R und S, in denen die Ordnungsfunktion entlang
des Pfades in eine Richtung aufsteigend definiert ist und die Erweiterung von ϕ1 in diese
Richtung durchgeführt wird. Mit k ≤ m lässt sich die amortisierte Zeit pro CSTI durch
O(m2 ) beschränken.
Je nach Definition der Ordnungsfunktion und der gegebenen Bäume ist es möglich,
dass mehr als polynomiell viele aufeinander folgende maximale CSTI verworfen werden.
Das passiert beispielsweise dann, wenn bei der Enumeration der maximalen Matchings in
einem bipartiten Graphen mit |V | = |X| für die gewurzelten Teilbäume r0 der zugeordneten
3.4. ENUMERATIONSVARIANTEN UND -KRITERIEN
45
Kinder I(r0 ) > I(r) gilt, aber für jede Erweiterung entlang der Kinder der Kinder ein
gewurzelter Teilbaum r00 mit I(r00 ) < I(r) existiert. Deshalb handelt es sich um keinen
polynomial-delay-Algorithmus. Der Speicherverbrauch zur Enumeration der MaxWBM’
auf einem vollständigen bipartiten Graphen beträgt nach Satz 2.22 O(|VR | + |VS |). Die
gleiche Schranke gilt auch für alle bipartiten Graphen zusammen, auf denen entlang eines
CSTI enumeriert wird, denn alle Knoten in diesen bipartiten Graphen sind paarweise
disjunkt. Die Bestimmung der Kombination in Algorithmus 3.2 (GetMaximumCSTI, hier
mit maximalen Matchings) wird über die booleschen Variablen f realisiert. Diese können
jeweils in der aufrufenden Rekursion gespeichert und übergeben werden, so dass nicht mehr
als O(m) dieser Variablen gleichzeitig gespeichert werden müssen. Mit m ∈ O(|VR | + |VS |)
ergibt sich folgendes Resultat.
Satz 3.9. Der in Abschnitt 3.4.1 beschriebene Algorithmus zur Enumeration aller Nm
maximalen CSTI auf zwei Bäumen R und S, mit m als Größe eines MCSTI, ist ein
polynomial-space- und polynomial-total-time-Algorithmus mit Zeitschranke O(m2 Nm ) und
Platzschranke O(|VR | + |VS |).
3.4.2
Maximale CSTI mit Mindestgröße
Im Folgenden wird ein Algorithmus angegeben, der alle maximalen CSTI mit einer vom
Benutzer festgelegten Mindestgröße enumeriert. Der Algorithmus greift Techniken aus den
beiden Algorithmen 3.1 und 3.3 auf. Sei dazu m die vom Benutzer geforderte Mindestgröße des CSTI. Die Idee zur Enumeration liegt darin, für einen Isomorphismus, der gerade
berechnet wird, festzuhalten, welche Größe dieser durch Erweiterung höchstens noch erreichen kann. Die Erweiterungen erfolgen dann nur entlang solcher Kanten, die die vom
Benutzer festgelegte Grenze m nicht unterschreiten.
Der grundlegende Ablauf von Algorithmus 3.4 zur Enumeration von maximalen CSTI
der Mindestgröße m gestaltet sich wie folgt. Zunächst wird geprüft, ob es überhaupt einen
CSTI der Mindestgröße m gibt. Falls nicht, kann das Programm beendet werden (Zeile 1
bis 3). Anschließend werden, wie in den beiden vorherigen Algorithmen, alle Paare (r, s)
von gewurzelten Teilbäumen nacheinander aufgezählt (Zeile 4 und 5). In Zeile 6 wird sichergestellt, dass die Suche nach maximalen CSTI nur dann beginnt, wenn die Mindestgröße
m erreicht werden kann. Dies lässt sich, wie bekannt, mit Hilfe der aus dem Algorithmus
von Edmonds gewonnenen Informationen feststellen. In Zeile 7 wird sichergestellt, dass ϕ1
so groß ist, dass es mindestens einen Isomorphismus ϕ2 auf den Teilbäumen (r, s) gibt, so
dass |ϕ1 | + |ϕ2 | ≥ m ist. In Zeile 8 werden dann alle Isomorphismen ϕ2 aufgezählt, die
diese Bedingung erfüllen. Anschließend wird der verbundene Isomorphismus ausgegeben,
wenn er bisher nicht gefunden wurde. Die Prüfung erfolgt mit der Ordnungsfunktion I, wie
dies in Abschnitt 3.3.2 beschrieben wurde. Die Aufzählung von maximalen Isomorphismen
46
KAPITEL 3. ENUMERATION VON COMMON SUBTREES UND CSTI
Eingabe: Zwei Bäume R und S, Mindestgröße m
Ausgabe: Alle maximalen CSTI von R und S mit einer Mindestgröße von m.
1:
2:
if SizeMCSTI(R, S) < m // Algorithmus 2.2 then
return Es gibt keinen CSTI mit einer Mindestgröße von m.
3:
end if
4:
for all r ∈ RSTR mit I(r) < I(r) do
5:
6:
7:
for all s ∈ RSTS do
if D(r, s) + D(r, s) ≥ m then
for all Maximalen CSTI ϕ1 von (r, s) mit |ϕ1 | ≥ m − D(r, s) do
for all Maximalen CSTI ϕ2 von (r, s) mit |ϕ2 | ≥ m − |ϕ1 | do
8:
Verbinde die Isomorphismen ϕ1 und ϕ2 der gewurzelten Teilbäume zu einem
9:
maximalen CSTI ϕ von R und S.
Gebe ϕ aus, falls ϕ bisher nicht gefunden wurde.
10:
end for
11:
12:
13:
14:
15:
end for
end if
end for
end for
Algorithmus 3.4: EnumMinSizeMaximalCSTI(R, S, m)
mit festgelegter Mindestgröße auf einem Paar von gewurzelten Teilbäumen (Zeile 7 und 8)
wird im Folgenden beschrieben.
Enumeration von maximalen CSTI auf gewurzelten Teilbäumen mit vorgegebener Mindestgröße
Dieser Abschnitt orientiert sich an Abschnitt 3.3.1. Hier werden im Wesentlichen nur die
Änderungen gegenüber des dort vorgestellten Verfahrens angegeben. Sei der Aufruf mit den
gewurzelten Teilbäumen (r0 , s0 ) und der Mindestgröße m als Parameter erfolgt. Die Idee,
nur CSTI von (r0 , s0 ) der Mindestgröße m zu enumerieren, besteht darin, in einer globalen
Variablen2 p festzuhalten, wie groß der aktuell generierte Isomorphismus höchstmöglich
werden kann. Zu Beginn, direkt nach dem Aufruf aus Algorithmus 3.4, sei daher p durch
p := D(r, s) definiert. Die weiteren Zuordnungen der Knoten erfolgen dann so, dass stets
p ≥ m gilt.
Die Erweiterung von ϕ erfolgt, wie in Abschnitt 3.3.1 beschrieben, über Matchings. Falls
p = m gilt, läuft die weitere Rekursion, genau wie in Abschnitt 3.3.1, über die Maximum
Weight Bipartite Matchings. Ansonsten wird versucht, den Isomorphismus über maximale
Matchings zu erweitern.
2
Es gibt je eine globale Variable für ϕ1 und ϕ2 .
3.4. ENUMERATIONSVARIANTEN UND -KRITERIEN
47
Sei (r, s) = (Rvu , Sxw ) das Paar von gewurzelten Teilbäumen, über die der Isomorphismus
auf der aktuellen Rekursionsebene erweitert werden soll. Daraus folgt, dass in jedem Fall
ϕ(v) = x zum Isomorphismus hinzugefügt wird. Sei weiterhin p0 definiert durch den Wert p
zu Beginn der Rekursion auf dieser Ebene. Vor der Aufzählung des ersten Matchings wird p
um D(r, s) − 1 verringert. Sei M = {v1 x1 , v2 x2 , . . . , vk xk } das letzte enumerierte Matching
und M 0 das vorherige Matching. Falls M das erste Matching ist, gelte M 0 = ∅. Zu p wird
P
der Wert p(M ) := vj xj ∈M D(Rvvj , Sxxj ) addiert, anschließend wird p um p(M 0 ) verringert.
Diese Änderungen an p haben zur Folge, dass p dann der höchstmöglichen Größe entspricht,
die der Isomorphismus mit den weiteren Zuordnungen ϕ(vj ) = xj erreichen kann. Sollte
das maximale Matching M auch ein Maximum Matching sein, gilt p = p0 . Ansonsten gilt
p < p0 . Die Aussagen in diesem Absatz ergeben sich aus der Definition von D in Abschnitt
2.2.2.
Gilt weiterhin p < m, kann das enumerierte maximale Matching M auf keinen Fall zu
einem Isomorphismus der Mindestgröße m führen. In diesem Fall werden weitere Matchings
enumeriert, bis p ≥ m gilt. Laut Abschnitt 3.3.1 müssen nach der Bestimmung eines
Matchings alle Kombinationen von Isomorphismen auf den Teilbäumen (Rvvj , Sxxj ) mit j ∈
{1, . . . , k} gebildet werden. Zunächst wird, wie dort beschrieben, auf all diesen Teilbäumen
der jeweils erste Isomorphismus berechnet. Zu beachten ist, dass, nachdem rekursiv ein
Isomorphismus auf (Rvvj , Sxxj ) für ein j berechnet wurde, sich der Wert in der globalen
Variablen p verringert haben kann. Dabei gilt aber stets m ≤ p ≤ p0 . Nachdem überall eine
erste Lösung bestimmt wurde, steht in p die exakte Größe des Isomorphismus ϕ1 bzw. ϕ2
bezogen auf Zeile 7 bzw. 8 in Algorithmus 3.4. Die Aufzählung aller Kombinationen von
Isomorphismen auf den gewurzelten Teilbäumen (Rvvj , Sxxj ) erfolgt wie in Abschnitt 3.3.1
beschrieben. Der Wert p entspricht dabei während der gesamtem Enumeration der Größe
des Isomorphismus ϕ1 bzw. ϕ2 , falls dieser vollständig berechnet wurde, also maximal
ist, bzw. der höchstmöglichen Größe, die dieser noch erreichen kann, falls er noch nicht
maximal ist, wie aus der weiteren Beschreibung hervorgeht.
Nachdem alle Kombinationen gebildet wurden, werden für den nächsten Isomorphismus
ϕ1 bzw. ϕ2 zunächst die Zuordnungen der letzten Kombination entfernt, die entsprechenden
Rekursion auf deren Kindern also beendet (vgl. nächster Absatz). Die Aufzählung auf dem
Matching M ist dann abgeschlossen. An dieser Stelle wird dann, wie oben beschrieben, das
nächste Matching gesucht, das zu einem Isomorphismus der Mindestgröße m führen kann.
Damit der Wert in p korrekt bleibt, muss, direkt bevor die Rekursion auf der aktuellen
Ebene beendet wird, p zunächst um p(M ) für das letzte Matching verringert und um
D(r, s) − 1 erhöht werden, genau andersherum wie ganz zu Beginn. Damit gilt dann wieder
p = p0 .
Die Aktualisierung von p wird anhand Abbildung 3.9 illustriert. Mit (r, s) = (Rvu , Sxw )
gilt dort D(Rvu , Sxw ) = 6. Beim Aufruf aus Algorithmus 3.4 wird somit p auf 6 gesetzt. Sei
außerdem m = 5 die geforderte Mindestgröße. Vor der Aufzählung der Matchings wird p
48
KAPITEL 3. ENUMERATION VON COMMON SUBTREES UND CSTI
u
w
v
x
v1
v3
v4
x2
x1
v2
v5
x4
x5
x3
x6
Abbildung 3.9: Beispiel zur Aktualisierung von p
nach der obigen Beschreibung um D(Rvu , Sxw ) − 1 verringert, so dass p = 1 gilt. Sei M1 =
{v1 x1 , v2 x2 } das erste enumerierte Matching. Für dieses wird p um p(M1 ) = D(Rvv1 , Sxx1 ) +
D(Rvv2 , Sxx2 ) = 2 + 3 erhöht. Damit gilt wieder p = 6. Da M1 ein Maximum Matching
auf dem zugehörigen bipartiten Graphen ist, ist das genau der Wert, der in p stehen muss.
Sobald die Rekursion auf den gewurzelten Teilbäumen (Rvv1 , Sxx1 ) und (Rvv2 , Sxx2 ) abgeschlossen ist, wird das nächste maximale Matching gewählt. Sei dieses M2 = {v1 x1 , v2 x3 }. Dann
wird p um p(M1 ) = 5 verringert und um p(M2 ) = D(Rvv1 , Sxx1 ) + D(Rvv2 , Sxx3 ) = 2 + 1 = 3
erhöht, so dass anschließend p = 4 gilt. Das entspricht genau der höchstmöglichen Größe,
auf die der Isomorphismus ϕ mit ϕ(v) = x, ϕ(v1 ) = x1 und ϕ(v2 ) = x3 erweitert werden
kann. Dieses Matching wird übersprungen, da 4 = p < m = 5 gilt. Nachdem alle Matchings und in allen Matchings, die zu der geforderten Mindestgröße führen können, auf den
zugehörigen Paaren von gewurzelten Teilbäumen alle Kombinationen von Isomorphismen
enumeriert wurden, muss der Wert in p wieder zurückgesetzt werden. Für dieses Beispiel
werden die anderen maximalen Matchings ausgelassen und angenommen, dass M2 das letzte Matching sei. Dann wird p um p(M2 ) = 3 auf 1 verringt und um D(Rvu , Sxw ) − 1 = 5
erhöht, so dass in p wieder der Wert 6 steht. Zu jeder Zeit war in p offenbar der korrekte
Wert gespeichert. Das gilt auch für alle tiefere Rekursionsebenen.
Laufzeit und Speicherverbrauch
Dieser Algorithmus ist kein polynomial-total-time Algorithmus. Sei m die geforderte Mindestgröße. Das Problem stellt die Enumeration der maximalen Matchings in einem bipartiten Graphen mit Mindestgewicht dar. Diese erfolgt immer dann, wenn die zu erreichende
Größe des aktuellen CSTI größer als m ist. Es ist leicht, bipartite Graphen mit Gewichten
anzugeben, in denen das Verhältnis der Anzahl aller maximalen Matchings zu maximalen
Matchings mit einem bestimmten Mindestgewicht nicht polynomiell beschränkt ist. Wenn
diese bipartiten Graphen maßgeblich für die Gesamtmenge aller maximalen CSTI mit Mindestgröße m verantwortlich sind, ist das Verhältnis verworfener Matchings zur Gesamtzahl
der maximalen CSTI mit Mindestgröße nicht durch ein Polynom beschränkt. Ein Beispiel
sind die Sterngraphen aus Abbildung 3.1, wobei jeweils die Hälfte der „Strahlen“ aus zwei
3.5. KNOTEN- UND KANTENBEZEICHNER
49
statt einer Kante besteht. Wenn dann m um eins geringer als die Größe eines MCSTI
gewählt wird, führt das zu der hier beschriebenen Situation. Die Größe m wird nur dann
erreicht, wenn, bis auf höchstens eine Ausnahme, jeweils Strahlen gleicher Länge einander
zugeordnet werden.
Der Platzbedarf ist durch O((|VR | + |VS |) · |VR | · |VS |) beschränkt und entspricht der
Schranke zur Enumeration der Maximum CSTI. Dies schließt die Enumeration von maximalen Matchings ein.
3.4.3
Enumerationskriterien
In diesem Abschnitt werden einige Kriterien vorgestellt, die sich mit den vorgestellten
Varianten verbinden lassen.
Einzelne feste Knoten oder Kanten
Die Bäume der Eingabe repräsentieren häufig Strukturen aus der echten Welt. Deshalb
können einige Knoten oder Kanten als besonders wichtig gelten, die auf jeden Fall im
Common Subtree Isomorphismus vorhanden sein müssen. Für eine einzelne Kante oder
einen einzelnen Knoten lässt sich das Problem sehr einfach lösen. Im Fall einer Kante
beginnt die Enumeration ausgehend von dieser und nur dieser Kante. Bei einem Knoten
beginnt die Enumeration dann von allen Kanten, zu denen der Knoten inzident ist.
Knotengrad
Der Benutzer könnte eine Anforderung stellen, dass Knoten nur dann aufeinander abgebildet werden, wenn der Knotengrad übereinstimmt oder einem bestimmten Wert oder
Wertebereich entspricht. Entsprechend werden dann nur diese Matchings berücksichtigt.
Die anderen werden verworfen, ähnlich dem Vorgehen bei den Isomorphismen mit Mindestgröße.
Zusätzlich nicht-maximale CSTI
Bisher wurden nur maximale CSTI aufgezählt, also solche, die in keinem anderen enthalten
sind. Nicht-maximale CSTI lassen sich aufzählen, wenn bei der Bestimmung der Matchings
alle möglichen Matchings enumeriert werden und nicht nur solche, die maximal sind oder
gar ein Maximum darstellen. Hier handelt es sich um ein nicht schwieriges kombinatorisches
Problem, weshalb dazu kein konkreter Algorithmus angegeben wird.
3.5
Knoten- und Kantenbezeichner
In Abschnitt 3.4.3 wurde beschrieben, dass Knoten oder Kanten auch gewisse Bedeutungen
haben können. Beispielsweise gilt das für die in der Einleitung erwähnten Feature Trees
50
KAPITEL 3. ENUMERATION VON COMMON SUBTREES UND CSTI
a
c
b
c
a
a
b
a
c
b
a
c
b
c
w(σ1 , σ2 )
a
b
c
a
2
0
-1
b
0
3
-1
c
-1
-1
4
(b) Gewichtsfunktion w
(a) Zwei gelabelte Bäume
Abbildung 3.10: Common Weighted Subtree Isomorphismus mit Gewicht W (ϕ) = 10
[24]. In Abschnitt 2.1 wurden gelabelte Graphen und ein Isomorphismus auf gelabelten
Graphen beschrieben. Darauf aufbauend kann ein CSTI auf gelabelten Bäumen definiert
werden.
Definition 3.10 (Common Labeled Subtree Isomorphismus, MCLSTI).
0 ) und S 0 = (V 0 , E 0 )
Seien R = (VR , ER ) und S = (SR , ES ) Bäume, und R0 = (VR0 , ER
S
S
Teilbäume dieser Bäume. Seien weiterhin l1 : VR ∪ ER → Σ und l2 : VR ∪ ER → Σ Labelfunktionen.
Wenn R0 und S 0 isomorph bezüglich l1 und l2 sind, wird der zugehörige Isomorphismus
ϕ : VR0 → VS0 als Common Labeled Subtree Isomorphismus (CLSTI) bezeichnet.
Falls ϕ größtmöglich ist, wird ϕ Maximum Common Labeled Subtree Isomorphismus (MCLSTI) genannt.
In Anlehnung an die gewichteten Matchings lässt sich auch ein gewichteter CSTI definieren.
Definition 3.11 (Common Weighted Subtree Isomorphismus, MCWSTI).
0 ) und S 0 = (V 0 , E 0 )
Seien R = (VR , ER ) und S = (SR , ES ) Bäume, und R0 = (VR0 , ER
S
S
Teilbäume dieser Bäume. Seien weiterhin l1 : VR ∪ ER → Σ und l2 : VR ∪ ER → Σ
Labelfunktionen und w : Σ × Σ → Q eine symmetrische Gewichtsfunktion.
Wenn R0 und S 0 isomorph sind3 , wird der zugehörige Isomorphismus ϕ : VR0 → VS0 als
Common Weighted Subtree Isomorphismus (CWSTI) mit Gewicht W (ϕ), definiert durch
P
P
W (ϕ) := v∈V 0 w(l1 (v), l2 (ϕ(v))) + uv∈E 0 w(l1 (uv), l2 (ϕ(uv))), bezeichnet.
R
R
Falls W (ϕ) größtmöglich ist, wird ϕ Maximum Common Weighted Subtree Isomorphismus
(MCWSTI) genannt.
In Abbildung 3.10 ist ein CWSTI dargestellt. Die Buchstaben in den Knoten und an den
Kanten stellen die Bezeichner dar. Die aufeinander abgebildeten Knoten geben zusammen
ein Gewicht von 2 + 3 − 1 = 4, die Kanten ergeben 4 + 2 = 6, insgesamt also W (ϕ) = 10.
Der CWSTI ist allerdings kein CLSTI, denn dort wird ein Knoten mit Bezeichner b auf
einen Knoten mit Bezeichner c abgebildet.
3
Es wird keine Isomorphie bezüglich l1 und l2 gefordert.
3.5. KNOTEN- UND KANTENBEZEICHNER
51
CLSTI und CWSTI unterscheiden sich insofern, dass im ersten Fall die Bezeichner in
jedem Fall übereinstimmen müssen. Im zweiten Fall dürfen sie verschieden sein. Wie gut sie
„zueinander passen“, hängt von der Gewichtsfunktion w ab. Beispielsweise könnten „wichtige Knoten“ ein bestimmtes Label erhalten und w so definiert werden, dass dieses Label
zusammen mit anderen Labeln einen besonders hohen Wert unter w hat. Die Ähnlichkeit von Feature Trees wird im Rahmen dieser Arbeit mit Hilfe von MCWSTI bestimmt.
Die Knoten in Feature Trees repräsentieren ein Fragment eines Molekül. Die in [24] beschriebene Vergleichsfunktion (comparison function) c ist definiert durch c(0, 0) = 1 und
c(a, b) =
2min(a,b)
a+b
für a + b > 0, wobei a und b der Anzahl der Nicht-Wasserstoff-Atome
des entsprechendes Fragments entsprechen. Übertragen auf CWSTI stehen die Label für
die Anzahl dieser Atome, mit Σ ⊂ N. Die Gewichtsfunktion w wird definiert durch w := c.
Dieser Arbeit steht eine Datenbank mit 51415 Feature Trees zur Verfügung. Ähnlichkeitsanalysen auf den Feature Trees, mit Hilfe von MCWSTI, erfolgen in Abschnitt 4.1. In den
folgenden beiden Abschnitten 3.5.1 und 3.5.2 wird beschrieben, wie sich CWSTI und CLSTI finden lassen. Dabei werden die Varianten „Maximum“, „maximal“ und „Mindestgröße“
bzw. „Mindestgewicht“ betrachtet.
3.5.1
Enumeration von Common Weighted Subtree Isomorphismen
Die Enumeration von CWSTI wurde im Rahmen dieser Arbeit durch Modifikationen am
Algorithmus von Edmonds, sowie den Enumerationsalgorithmen aus Abschnitt 3.3 und 3.4
realisiert. Diese Modifikationen werden im Folgenden, getrennt nach Bezeichnern für Knoten und Kanten, beschrieben. Beide Modifikationen können einzeln oder auch zusammen
hinzugenommen werden.
Knotenbezeichner
Seien R und S zwei Bäume, sowie ϕ ein CWSTI mit den Bezeichnungen aus Definition 3.11.
Seien v und x Knoten mit ϕ(v) = x. Dann wird das Gewicht W (ϕ) für den Knoten v um
w(l1 (v), l2 (x)) erhöht. Dieses Gewicht lässt sich durch zwei Änderungen an Algorithmus
2.1 (GetD) berücksichtigen. In Zeile 3 und 8 wird die „1“ durch w(l1 (v), l2 (x)) ersetzt. Mit
diesen Änderungen steht dann in D(r, s) das Gewicht eines MCWSTI auf dem Paar von
gewurzelten Teilbäumen (r, s). So lang die symmetrische Gewichtsfunktion w positiv ist,
also w(a, b) > 0 für alle a, b ∈ Σ, muss nichts weiter beachtet werden. Die Algorithmen 3.1
bis 3.4 können dann unverändert übernommen werden.
Falls a, b ∈ Σ mit w(a, b) ≤ 0 existieren, muss ein MCWSTI nicht mehr zwingend maximal sein, wie Abbildung 3.11 zu entnehmen ist. Die dort dargestellen Zahlen repräsentieren den Wert w(l1 (ri ), l2 (si )). So ist der Isomorphismus ϕ1 , definiert durch ϕ1 (r2 ) = s2 ,
ein nicht-maximaler MCWSTI. Das gleiche gilt für ϕ2 , definiert durch ϕ2 (r1 ) = s1 und
ϕ2 (r2 ) = s2 , sowie für ϕ3 (ri ) = si für i ∈ {2, 3, 4}. Problematisch ist in diesem Fall
52
KAPITEL 3. ENUMERATION VON COMMON SUBTREES UND CSTI
r 1 0 s1
1
r2
s2
-3
r3
r4
3
s3
s4
Abbildung 3.11: Der Isomorphismus ϕ(r2 ) = s2 ist ein nicht-maximaler Maximum CWSTI.
zum einen, dass MCWSTI ϕ mit |ϕ| = 1 existieren können. Diese werden dann generell nicht gefunden, wenn die Suche stets von einem Kantenpaar ausgehend startet. Der
Enumerationsalgorithmus müsste damit um die Suche nach Isomorphismen ϕ mit |ϕ| = 1
erweitert werden. Zum anderen führen nicht-maximale MCWSTI in Verbindung mit Kantenlöschungen (vgl. Abschnitt 3.3.2) dazu, dass diese mehrfach gefunden werden können.
Beispielsweise wird ϕ3 gefunden, wenn keine Kante entfernt wurde, aber auch dann, wenn
die Kante r1 r2 gelöscht wurde. Diese Probleme lassen sich vermeiden, wenn zum einen
Maximalität für alle CWSTI vorausgesetzt wird und zum anderen die Ordnungsfunktion
I genutzt wird, um mehrfach gleiche Isomorphismen zu erkennen. In dem dieser Arbeit
zugehörigen Programm wurde das genau so umgesetzt und lässt sich für Algorithmus 3.1
und 3.4 gleichermaßen verwenden. Maximale CSTI (Algorithmus 3.3) und CWSTI unterscheiden sich nicht, da die Größe bzw. das Gewicht für diese nicht relevant ist.
Die Ausgabe kann in allen drei Enumerationsvarianten um W (ϕ) erweitert werden.
Dieser Wert lässt sich einerseits aus ϕ in O(|ϕ|) Zeit berechnen. Andererseits steht er
in der globalen Variablen p zur Verfügung, die in Abschnitt 3.4.2 zur Aufzählung aller
maximalen CSTI mit Mindestgewicht beschrieben wurde. In der dieser Arbeit beiliegenden
Implementierung wird p in allen drei Varianten stets aktuell gehalten. So kann die Größe
im Fall von CSTI bzw. das Gewicht im Fall von CWSTI in O(1) ausgegeben werden.
Kantenbezeichner
Kantenbezeichner werden auf eine recht ähnliche Art berücksichtigt. Seien (r, s) = (Rvu , Sxw )
zwei gewurzelte Teilbäume, für die das Gewicht eines MCWSTI bestimmt werden soll. Im
Programm wurde die Entscheidung getroffen, das Gewicht w(l1 (uv), l2 (wx)) zu D(r, s)
hinzuzufügen. Die folgende Beschreibung richtet sich nach dieser Entscheidung. Analog zu
den Knotenbezeichnern wird in Algorithmus 2.1 die Berechnung in Zeile 3 und 8 verändert.
Dort wird jeweils das Gewicht w(l1 (uv), l2 (wx)) hinzuaddiert. Wenn dann in Zeile 6 die
Gewichte der Matchingkanten festgelegt werden, ist durch obige Entscheidung das Gewicht
w(l1 (vvi ), l2 (xxj ) in D(Rvvi , Sxxj ) enthalten, so dass an dieser Stelle dann nichts addiert
werden muss.
3.5. KNOTEN- UND KANTENBEZEICHNER
53
Zu beachten ist, dass in der Summe D(r, s)+D(r, s) das Gewicht w(l1 (uv), l2 (wx)) zwei
mal addiert wurde. In den Enumerationsalgorithmen für die MCWSTI und die maximalen
CWSTI mit Mindestgewicht muss dies entsprechend berücksichtigt werden. Gleiches gilt für
Zeile 8 in Algorithmus 2.2 (SizeMCSTI). Das doppelt gezählte Gewicht muss entsprechend
einmal abgezogen werden, um das korrekte Gewicht des verbundenen Isomorphismus zu
erhalten.
Die Aussagen in Bezug auf mehrfach gleiche Isomorphismen und Kantenlöschungen
lassen sich aus dem vorherigen Abschnitt übernehmen. In der Implementierung wird das
Gewicht durch die Kantenbezeichner in der globalen Variablen p berücksichtigt, so dass
die Ausgabe des Gewichts mit Kantenbezeichnern in O(1) erfolgen kann.
Laufzeit und Speicherverbrauch
Die Laufzeit und der Speicherverbrauch zur Enumeration von maximalen CWSTI, maximalen CWSTI mit Mindestgewicht und Maximum CWSTI stimmen mit den Laufzeiten
und dem Speicherverbrauch zur Enumeration der entsprechenden Verfahren ohne Bezeichner überein, da Bezeichner im Wesentlichen nur Einfluss auf die Bestimmung der Werte D
haben. Die Zeit- und Platzschranken bleiben dabei unverändert.
3.5.2
Enumeration von Common Labeled Subtree Isomorphismen
In Verbindung mit Common Labeled Subtree Isomorphismen muss das Label von aufeinander abgebildeten Knoten und Kanten übereinstimmen. Es macht deshalb Sinn, im
Algorithmus von Edmonds bei der in Abschnitt 2.2.2 beschriebenen dynamischen Programmierung anzusetzen.
Sei dazu (r, s) = (Rvu , Sxw ) das Paar von gewurzelten Bäumen, für das die Größe eines
MCLSTI ermittelt werden soll. Algorithmus 2.1 (GetD) wird dazu folgendermaßen modifiziert. Zwischen Zeile 1 und 2 wird ein Test eingefügt. Falls l1 (u) 6= l2 (w) ∨ l1 (v) 6=
l2 (x) ∨ l1 (uv) 6= l2 (wx), wird D(Rvu , Sxw ) auf −1 gesetzt. Dieser Wert signalisiert, dass
ein CLSTI ϕ mit ϕ(u) = w und ϕ(v) = x nicht möglich ist. In Abschnitt 2.2.2 wurde der
(r, s) zugehörige bipartite Graph beschrieben, auf dem das Gewicht eines Maximum Weight
Bipartite Matching bestimmt werden soll. In Zusammenhang mit CLSTI wird die Kante
vi xj aus dem bipartiten Graphen entfernt, falls D(Rvvi , Sxxj ) = −1 ist, denn es gilt dann
l1 (vi ) 6= l2 (xj ) oder l1 (vvi ) 6= l2 (xxj ). Zeile 8 in Algorithmus 2.1 wird dementsprechend
modifiziert. In Abschnitt 2.4.2 wurde beschrieben, wie das Gewicht eines MaxWBM auf
einem bipartiten Graphen bestimmt werden kann. Als Eingabe für das dort vorgestellte
Verfahren sind insbesondere auch nicht vollständige bipartite Graphen erlaubt.
Die Enumerationsalgorithmen 3.1 bis 3.4 greifen auf die Enumeration von Maximum
bzw. maximalen Matchings zurück. Die Enumeration von MaxWBM wurde in Abschnitt
3.2.2 beschrieben. Ein Verfahren zur Enumeration von maximalen Matchings auf nicht voll-
54
KAPITEL 3. ENUMERATION VON COMMON SUBTREES UND CSTI
ständigen bipartiten Graphen wird von Uno in [27] beschrieben. Dabei handelt es sich um
ein rekursives Verfahren, dass dem Verfahren aus Abschnitt 3.2.2 nicht unähnlich ist. Auch
dort erfolgt eine Zerlegung in jeweils zwei Teilprobleme. Damit sind alle Voraussetzungen
gegeben, um MCLSTI und maximale CLSTI, nach Wunsch mit Mindestgröße, aufzuzählen.
Laufzeit und Speicherverbrauch
Die Laufzeitschranke zur Enumeration von Maximum CLSTI stimmt mit der Laufzeit zur
Enumeration von Maximum CSTI überein. Der zulässige Teilgraph G(y ∗ ) lässt sich auch
aus einem nicht vollständigen bipartiten Graphen mit Gewichtsfunktion konstruieren. Die
nötigen Änderungen zur Bestimmung von D verändern die Zeitschranke nicht. Somit bleibt
die Zeitschranke insgesamt identisch. Für die Platzschranke gilt die gleiche Aussage.
Maximale Matchings auf einem nicht notwendig vollständigen bipartiten Graphen lassen sich mit Platzbedarf O(k) in amortisierter Zeit O(n) pro maximalem Matching berechnen, wobei n der Knoten- und k der Kantenzahl entspricht [27]. Mit den Bezeichnungen aus
P
P
Abschnitt 3.3.3 ergibt sich i mi < i ri + si < |VR | + |VS |. Unter Zuhilfenahme der Ordnungsfunktion zur Erkennung identischer maximaler CLSTI ergibt dies eine Zeitschranke
von O((|VR | + |VS |)2 · Nm ) zur Enumeration von maximalen CLSTI. Da die Knoten in
allen bipartiten Graphen entlang des CLSTI paarweise disjunkt sind, ist der Speicherbedarf für die Enumeration der maximalen Matchings durch O(|VR | · |VS |) beschränkt. Das
ist auch gleichzeitig die Platzschranke für die Enumeration der maximalen CLSTI, da der
Platzbedarf für die Enumeration von maximalen CSTI darin enthalten ist.
Die Aussagen zu maximalen CSTI mit Mindestgröße lassen sich auf maximale CLSTI
mit Mindestgröße übertragen.
3.6
Enumeration von Common Subtrees
In diesem Abschnitt wird ein im Rahmen dieser Arbeit entwickelter Algorithmus zur Enumeration von Common Subtrees (vgl. Definition 2.9) vorgestellt. Anhand Abbildung 2.1
wurde gezeigt, wie aus einem CSTI ein CST gewonnen werden kann. Die naheliegende Idee,
maximale bzw. Maximum CSTI aufzuzählen und die zugehörigen maximalen bzw. Maximum CST auszugeben, ist nicht besonders zielführend. Denn zu einem CST kann es, wie
aus Abschnitt 2.1 bekannt, mehrere CSTI geben. Dies würde dazu führen, dass gleiche CST
mehrfach ausgegeben werden. Analog zur Unterdrückung der Ausgabe identischer CSTI
aus Abschnitt 3.3.2 könnte möglicherweise eine Ordnung auf den generierten CST definiert
werden, so dass dann jeder CST nur genau einmal ausgegeben wird. Problematisch ist,
dass zu einem CST mehr als polynomiell viele CSTI existieren können, wie Abbildung 3.1
zu entnehmen ist. Wegen der zu erwartenden hohen Laufzeit wurde diese Idee verworfen.
Stattdessen wurde ein Idee verfolgt, die unter Einsatz von zusätzlichem Speicherplatz
mit Hilfe von dynamischer Programmierung zunächst maximale bzw. Maximum CST auf
3.6. ENUMERATION VON COMMON SUBTREES
55
r (6,3,1,1,2,1)
(2,1)
(1)
(3,1,1)
(1)
(1)
Abbildung 3.12: Baumkanonisierung
Paaren von gewurzelten Teilbäumen enumeriert. Anschließend werden die CST miteinander verbunden. Falls ein CST zum ersten Mal auf diese Art berechnet wurde, wird er
ausgegeben und gespeichert. Die Speicherung erfolgt, um zu erkennen, ob ein CST bereits einmal berechnet wurde. In Abschnitt 3.6.1 wird eine Kanonisierung von gewurzelten
Bäumen beschrieben. Diese erlaubt eine effiziente Speicherung und einen schnellen Isomorphietest, wie in Abschnitt 3.6.2 beschrieben wird. Im folgenden Abschnitt 3.6.3 wird das
genaue Vorgehen, Maximum CST auf Paaren von gewurzelten Teilbäumen zu enumerieren,
beschrieben. Wie daraus Maximum CST für die Bäume der Eingabe berechnet werden und
identische Maximum CST nur einmal ausgegeben werden, wird in Abschnitt 3.6.4 beschrieben. Darauf folgt in Abschnitt 3.6.5 die Enumeration von maximalen CST und maximalen
CST mit Mindestgröße. Laufzeit- und Speicherplatzanalysen erfolgen in Abschnitt 3.6.6.
Abschnitt 3.6.7 beschäftigt sich mit einer Variante, in der statt Common Subtrees Tupel
von Teilbäumen der gegebenen Bäume enumeriert werden, auf denen ein Isomorphismus
existiert. Abschließend werden in Abschnitt 3.6.8 einige Beschleunigungstechniken für die
Enumeration von maximalen CST und den Tupeln von Teilbäumen aus Abschnitt 3.6.7
vorgestellt.
3.6.1
Baumkanonisierung
Um gewurzelte Bäume speichern zu können, bietet sich der von Valiente definierte isomorphism code an. Dieser code wird im Folgenden Baumkanonisierung genannt und unterscheidet sich bezüglich der Sortierung.
Definition 3.12 (Baumkanonisierung [28]). Sei T = (V, E) ein gewurzelter Baum mit
Wurzel r und Kindern r1 , . . . , rk von r. Die Baumkanonisierung K(T ) := K(r) ist eine
Folge von natürlichen Zahlen und definiert durch K(r) := (|V |); K(r1 ); . . . ; K(rk ). Die
Kinder von r seien dabei in nicht aufsteigender4 lexikographischer Ordnung bezogen auf
ihre Baumkanonisierung sortiert.
Zu einer Kanonisierung K sei T (K) := T ein gewurzelter Baum T mit K(T ) = K. In
Abbildung 3.12 ist ein gewurzelter Baum und die jeweilige Kanonisierung für alle Knoten
angegeben. Die kanonische Darstellung erlaubt einen schnellen und einfachen Isomorphietest für gewurzelte Bäume. Die folgende Aussage ist [28] entnommen.
4
Valiente definiert die Ordnung als nicht absteigend [28].
56
KAPITEL 3. ENUMERATION VON COMMON SUBTREES UND CSTI
Satz 3.13. Seien R und S zwei Bäume mit Wurzeln r und s. Dann existiert ein Isomorphismus ϕ : V (R) → V (S) mit ϕ(r) = s genau dann, wenn K(R) = K(S) ist.
Zu beachten ist, dass der Beweis zu Satz 3.13 für eine nicht absteigende Ordnung angegeben ist [28]. Der Beweis für eine nicht aufsteigende Ordnung verläuft analog. Dass
im Rahmen dieser Arbeit eine nicht aufsteigende Ordnung gewählt wurde, hat technische Implementierungsgründe. So fügt sich die erste Zahl, die der Baumgröße entspricht,
lexikographisch in die nicht aufsteigende Ordnung ein und erlaubt somit eine einfachere
Sortierung. Zum Zeit- und Platzbedarf der Bestimmung von K(T ) für einen gewurzelten
Baum T gilt nach [28] Folgendes.
Satz 3.14. K(T ) lässt sich mit Zeitschranke O(|T |2 ) und Platzschranke O(|T |) bestimmen.
Der Satz 3.14 zugrunde liegende Algorithmus [28] berechnet rekursiv die Kanonisierungen
für die Kinder, und sortiert diese dann mit dem wohlbekannten Sortieralgorithmus Radixsort. Die Zahlenfolgen werden anschließend aneinander gehängt, so dass daraus K(T )
entsteht.
3.6.2
Einfügen einer Baumkanonisierung in einen sortierten Binärbaum
Die berechneten Maximum bzw. maximalen CST werden für jedes Paar (r, s) von gewurzelten Teilbäumen in Form ihrer Baumkanonisierung in einem Binärbaum B(r, s) gespeichert.
Die Sortierung erfolgt dabei lexikographisch bezogen auf die einzelnen Zahlen der Folge, von
vorn beginnend. Sei |B(r, s)| definiert als die Anzahl der Zahlenfolgen in dem Binärbaum.
Die Zeit zum Einfügen von K(T ) in B(r, s) ist durch O(|T | log(|B(r, s)|)) beschränkt. Der
Faktor |T | ist die Zeitschranke zum Vergleich von K(T ) mit einer anderen Folge. Der zweite Faktor log(|B(r, s)|) ergibt sich als Zeitschranke für die binäre Suche, wenn der Baum
ausgeglichen gehalten wird, wie dies beispielsweise bei AVL- oder Rot-Schwarz-Bäumen
der Fall ist. Die Folge K(T ) wird nur dann in B(r, s) eingefügt, wenn sie dort noch nicht
vorhanden ist.
Beim Verbinden der CST von (r, s) und (r, s) erfolgt die Speicherung auf die selbe Art
und Weise. Die dazu nötige Wahl der Wurzel wird in Abschnitt 3.6.4 beschrieben. Die
Bestimmung der Kanonisierung K(T ) von T und die Einfügung in einen Binärbaum B
lässt sich als Satz formulieren.
Satz 3.15. Sei B ein Binärbaum mit Zahlenfolgen als Elementen, m := |B| die Anzahl
der gespeicherten Zahlenfolgen und T ein gewurzelter Baum mit n Knoten. Die Zeit zum
Einfügen von K(T ) in B ist durch O(n2 + n log m) beschränkt.
Bemerkung 3.16. Es gibt mehrere Algorithmen, die für zwei Bäume der Größe n in O(n)
Zeit entscheiden können, ob diese isomorph sind. Ein solcher Algorithmus wird beispielsweise von Aho und Hopcroft angegeben [1]. Die Kanonisierung nach Valiente ermöglicht
3.6. ENUMERATION VON COMMON SUBTREES
57
allerdings einen sehr schnellen Isomorphietest gegen eine Menge von Bäumen, wie gezeigt
wurde. Des Weiteren wird die Kanonisierung K(T ) für alle CST auf einem Paar (r, s) von
gewurzelten Teilbäumen schrittweise berechnet und Zwischenergebnisse wiederverwendet.
Es ist daher nicht unmittelbar klar, ob ein Isomorphietest in O(n), der dann möglicherweise gegen alle gespeicherten Bäume durchgeführt werden muss und möglicherweise keine
Zwischenergebnisse wiederverwenden kann, schneller ist. Ein anderer Vorteil der Kanonisierung nach Valiente ist die Tatsache, dass aus der Zahlenfolge der zugehörige Baum in
O(n) Zeit erstellt werden kann.
3.6.3
Dynamische Programmierung
In diesem Abschnitt wird beschrieben, wie für ein Paar (r, s) von gewurzelten Teilbäumen alle Maximum CST bestimmt werden können. Falls r oder s ein Blatt ist, gibt es
nur einen Maximum CST T . Dieser besteht aus genau einem Knoten. Wegen K(T ) = (1)
gilt somit B(r, s) = {(1)}. Ansonsten können die CST mit Hilfe von MaxWBM bestimmt
werden, ähnlich dem Vorgehen aus Abschnitt 3.3.1 zur Enumeration von Maximum CSTI
auf gewurzelten Teilbäumen. Wie dort beschrieben, lässt sich die Menge aller Maximum
CSTI disjunkt zerlegen, wobei jedem Matching dann eine Teilmenge der Maximum CSTI
zugeordnet ist. Um alle Maximum CST von r und s zu bestimmen, werden, genau wie in
Abschnitt 3.3.1, die Maximum Matchings enumeriert und auf diesen jeweils alle Maximum
CST bestimmt. Das geschieht analog zu Abschnitt 3.3.1, indem alle Kombinationen der
Maximum CST auf den einander zugeordneten Kindern unter einer neuen Wurzel verbunden und in B(r, s) eingefügt werden, falls sie dort noch nicht vorhanden sind. Die Maximum
CST der Kinder werden allerdings nicht rekursiv immer wieder enumeriert, sondern nur
genau einmal berechnet, und stehen dann, in einem Binärbaum gespeichert, zur Verfügung.
Der wesentliche Vorteil gegenüber der zu Beginn von Abschnitt 3.5 beschriebenen Idee,
alle Maximum CSTI zu berechnen und daraus die Maximum CST zu bestimmen, liegt
darin, dass hier in jeder Stufe der dynamischen Programmierung identische CST verworfen
werden und nicht erst dann, wenn ein Maximum CST für die Bäume der Eingabe bestimmt
ist. Die Laufzeitvergleiche in Abschnitt 4.2 belegen, dass die Enumeration von Maximum
CST mit diesem Verfahren deutlich schneller ist, als die Maximum CST aus den Maximum
CSTI zu generieren. In Algorithmus 3.5 (GetB) ist das in diesem Abschnitt beschriebene
Verfahren festgehalten. In Zeile 7 und 8 wird die Kanonisierung des verbundenen Maximum
CST berechnet. GetD(Rvu , Sxw ) entspricht der Anzahl der Knoten dieses Maximum CST.
Die Binärbäume B(r, s) seien zu Beginn alle leer.
3.6.4
Zusammenfügen der Teillösungen
Die Hauptalgorithmus zur Bestimmung aller Maximum CST von zwei Bäumen R und S
orientiert sich an Algorithmus 3.1 zur Enumeration aller Maximum CSTI. Der wesentliche
58
KAPITEL 3. ENUMERATION VON COMMON SUBTREES UND CSTI
Eingabe: Rvu , Sxw
Ausgabe: Verweis auf B(Rvu , Sxw )
1:
2:
3:
4:
5:
if B(Rvu , Sxw ) = ∅ // B(Rvu , Sxw ) noch nicht berechnet then
if Rvu oder Sxw ist ein Blatt then
B(Rvu , Sxw ) ← {(1)}
else
for all MaxWBM M = {v1 x1 , . . . , vk xk } auf dem durch die Kinder von v und x
definierten bipartiten Graphen, vgl. Abschnitt 2.2.2 und 3.3.1 do
for all (K1 , . . . , Kk ) ∈ GetB(Rvv1 , Sxx1 ) × . . . × GetB(Rvvk , Sxxk ) do
6:
Sortiere die Kanonisierungen K1 bis Kk lexikographisch nicht aufsteigend.
7:
Die sortierte Reihenfolge sei K10 bis Kk0 .
8:
K ← (GetD(Rvu , Sxw )); K10 ; . . . ; Kk0
9:
Füge K in B(Rvu , Sxw ) ein, falls noch nicht vorhanden.
end for
10:
11:
12:
end for
end if
13:
end if
14:
return Verweis auf B(Rvu , Sxw )
Algorithmus 3.5: GetB(Rvu , Sxw )
r1 (3,2,1)
r2 (2,1)
r2 (1)
r2 (3,1,1)
r3 (1) r1 (1)
Abbildung 3.13: Die Baumkanonisierung hängt von der Wahl der Wurzel ab.
Unterschied ist, dass nicht Maximum CSTI von (r, s) bzw. (r, s) miteinander verbunden
werden, sondern die in B(r, s) bzw. B(r, s) gespeicherten Kanonisierungen der Maximum
CST. Diese werden in einen Binärbaum B eingefügt, in dem alle bisher berechneten Kanonisierungen der Maximum CST von R und S gespeichert sind. Falls eine Kanonisierung
noch nicht vorhanden war, wird sie gespeichert und ausgegeben. Ansonsten wird sie verworfen und die nächste Kanonisierung berechnet.
Beim Verbinden der Maximum CST aus B(r, s) und B(r, s) ist darauf zu achten, dass
die Kanonisierung eines Baumes von der Wahl der Wurzel abhängt, wie Abbildung 3.13 zu
entnehmen ist. Die zugehörigen Kanonisierungen nach Valiente [28] sind neben den Knoten
angegeben. Nach Jovanović und Danilović [16] hat ein Baum ein Zentrum, dass aus genau
einem oder zwei Knoten besteht.
3.6. ENUMERATION VON COMMON SUBTREES
59
Eingabe: Zwei Bäume R und S
Ausgabe: Alle Maximum Common Subtrees von R und S
1:
B←∅
2:
m ← SizeMCSTI(R, S) // Algorithmus 2.2
3:
for all r ∈ RSTR mit I(r) < I(r) do
4:
5:
for all s ∈ RSTS do
if D(r, s) + D(r, s) = m then
for all Kanonisierungen K1 aus GetB(r, s) do
6:
for all Kanonisierungen K2 aus GetB(r, s) do
7:
8:
K ← K1 ; K2
9:
Erhöhe die erste Zahl der Zahlenfolge K um |K2 |.
Berechne T 0 := T (K) und bestimme den Wurzelknoten w, wie in Abschnitt
10:
3.6.4 beschrieben.
11:
Berechne K(T 0 ).
12:
if K(T 0 ) ist noch nicht in B vorhanden then
Gebe K(T 0 ) aus, und füge K(T 0 ) in den Binärbaum B ein.
13:
end if
14:
end for
15:
end for
16:
17:
18:
19:
end if
end for
end for
Algorithmus 3.6: EnumMaximumCST(R, S)
Definition 3.17 (Exzentrizität, Zentrum eines Baumes [16]). Sei T = (V, E) ein
Baum. Die Exzentrizität eines Knotens u ist definiert als das Maximum über die Länge der
Pfade von u zu allen Knoten v ∈ V .
Das Zentrum eines Baumes sind diejenigen Knoten aus V , die eine minimale Exzentrizität
aufweisen.
Das Zentrum eines Baumes T kann in Zeit O(|T |) gefunden werden. Beispielsweise
lässt sich mit dem wohlbekannten Algorithmus Tiefensuche die Exzentrizität bestimmen.
Daraus kann dann recht einfach das Zentrum bestimmt werden. Falls das Zentrum aus
genau einem Knoten besteht, wird dieser als Wurzel definiert. Von dieser Wurzel ausgehend
wird dann die Kanonisierung berechnet. Falls es zwei zentrale Knoten gibt, werden die
Kanonisierungen für diese beiden Knoten als Wurzel berechnet. Als Wurzel wird dann
derjenige Knoten behalten, der zu einer lexikographisch kleineren Kanonisierung führt.
Bezogen auf Abbildung 3.13 ist r2 Zentrum des dort dargestellten Baumes.
60
KAPITEL 3. ENUMERATION VON COMMON SUBTREES UND CSTI
Der gesamte Ablauf ist in Algorithmus 3.6 festgehalten. In Zeile 6 und 7 werden die Ka-
nonisierungen enumeriert. Zu beachten ist, dass nur die Kanonisierungen berechnet werden,
die tatsächlich gebraucht werden, da GetB nur auf den Paaren von gewurzelten Teilbäumen aufgerufen wird, die zu einem Maximum CST führen können. In Zeile 8 und 9 werden
zwei Kanonisierungen verbunden. In den gewurzelten Baum T (K1 ) wird T (K2 ) unter der
Wurzel eingehangen. Die Anzahl der Knoten erhöht sich dadurch um |K2 |, weshalb die
erste Zahl der Zahlenfolge K um diesen Wert erhöht wird. In Zeile 10 wird ein K zugehöriger Baum T (K) berechnet. Dies ist in Linearzeit bezogen auf |K| möglich. Dazu werden
rekursiv die Kind-Teilbäume von K erstellt und diese dann unter der Wurzel verbunden.
Die anderen Schritte wurden in diesem Abschnitt hinreichend beschrieben.
3.6.5
Maximale CST und maximale CST mit Mindestgröße
Im Folgenden wird beschrieben, wie anstelle von Maximum CST maximale CST mit Mindestgröße m enumeriert werden. Das Vorgehen ähnelt der Enumeration von maximalen
CSTI mit Mindestgröße. Dazu wird Algorithmus 3.5 (GetB) so modifiziert, dass in Zeile 5
maximale Matchings, und nicht Maximum Matchings, aufgezählt werden, falls m kleiner
der Größe eines MCST ist. Falls alle maximalen CST aufgezählt werden sollen, ohne eine
Mindestgröße festzulegen, können sämtliche im Folgenden beschriebenen Prüfungen auf die
Größe entfallen. Das betrifft die dynamische Programmierung und das Zusammenfügen der
Teillösungen.
Ein wesentlicher Unterschied betrifft Zeile 9 und das Einfügen von K in B(Rvu , Sxw ). Dadurch, dass maximale Matchings enumeriert werden, können in B(Rvu , Sxw ) Kanonisierungen unterschiedlicher Länge gespeichert werden. Da nur maximale CST enumeriert werden
sollen, dürfen Kanonisierungen K nur dann eingefügt werden, wenn es keine Kanonisierung
K 0 in B(Rvu , Sxw ) gibt, so dass T (K) isomorph zu einem Teilbaum von T (K 0 ) ist. Dies wäre
ein Widerspruch zur Maximalität des CST T (K). Sollte K nicht in B(Rvu , Sxw ) vorhanden
sein und kein solches K 0 existieren, kann K in B(Rvu , Sxw ) eingefügt werden. Allerdings
sind in dem Fall alle Kanonisierungen K 0 aus dem Binärbaum zu löschen, für die der CST
T (K 0 ) isomorph zu einem Teilbaum von T (K) ist. Insgesamt wird so sichergestellt, dass
die durch die Kanonisierungen repräsentierten Bäume nicht ineinander enthalten sind.
Ein weiterer Unterschied liegt in der Auswahl der Kanonisierungen K1 bis Kk in Zeile 6.
Nur dann, wenn die Größe der Kanonisierung K mindestens m − D(Ruv , Swx ) beträgt, wird
diese in den Binärbaum eingefügt. Denn nur in diesem Fall ist es möglich, zusammen mit
einer Kanonisierung aus B(Ruv , Swx ), die Mindestgröße m zu erreichen. Weil die Kanonisierungen in den Binärbäumen sortiert vorliegen, können die Tupel (K1 , . . . , Kk ), die zu einer
Kanonisierung K mit Mindestgröße m führen, effizient aufgezählt werden. Das Verfahren
ist ähnlich der Aufzählung der Kombination von Isomorphismen auf gewurzelten Teilbäumen aus Abschnitt 3.3.1 und 3.4.2. Die erste Auswahl der Kanonisierungen K1 bis Kk ist
3.6. ENUMERATION VON COMMON SUBTREES
R
r (6,3,1,1,2,1)
(2,1)
(1)
(3,1,1)
(1)
S
61
s (4,2,1,1)
(1)
(2,1)
(1)
(1)
Abbildung 3.14: Der Baum S ist in R enthalten.
jeweils die lexikographisch Größte aus den entsprechenden Binärbäumen. Wenn für ein i
und eine lexikographisch kleinste Kanonisierung Ki alle Kombinationen gebildet wurden,
wird für Ki bis Kk die lexikographisch größte und für Ki−1 die lexikographisch nächstkleinere Kanonisierung gewählt. Das Vorgehen ist analog zu den genannten Abschnitten. Wenn
für ein i die lexikographisch nächstkleinere Kanonisierung Ki bestimmt wird, und diese zusammen mit den anderen bestimmten Kanonisierungen nicht zur Mindestgröße m führen
kann, können alle lexikographisch kleineren Kanonisierungen aus B(Rvvi , Sxxi ) übersprungen
werden, da diese höchsten genau so groß wie Ki sind. Für Ki wird dann die lexikographisch
größtmögliche Kanonisierung und für Ki−1 die lexikographisch nächstkleinere gewählt.
Die Überprüfung, ob für zwei Kanonisierungen mit |K1 | < |K2 | der CST T (K1 ) isomorph zu einem Teilbaum von T (K2 ) ist, lässt sich nicht über einen einfachen Vergleich
der Zahlenfolgen herausfinden, wie Abbildung 3.14 zu entnehmen ist. Der Baum S ist isomorph zu einem Teilbaum von R, die Folge K(s) ist aber keine Teilfolge von K(r). Abhilfe
schaffen Algorithmen, die das Subtree Isomorphie Problem lösen.
Definition 3.18 (Subtree Isomorphismus [21]). Seien R und S Bäume, und R0 =
0 ) ein Teilbaum von R. Wenn R0 und S isomorph sind, wird ein zugehöriger Iso(VR0 , ER
morphismus ϕ : R0 → S als Subtree Isomorphismus (STI) bezeichnet.
Das Subtree Isomorphismus Problem stellt die Frage, ob ein Teilbaum von R in S
enthalten ist [21]. Dieses Problem wurde 1968 unabhängig von Edmonds und Matula in
Polynomialzeit gelöst [21]. Seitdem gab es einige Verbesserungen in Bezug auf die Laufzeit.
Ein Algorithmus mit Laufzeit O((|S|1,5 / log |S|)|R|), der dieses Problem löst, wurde von
Shamir und Tsur vorgestellt [26].
Die zusätzlichen Prüfungen auf Subtree Isomorphie lassen sich in einem Algorithmus
festhalten. Zur Enumeration von maximalen CST wird Zeile 9 in Algorithmus 3.5 (GetB)
durch den Aufruf „InsertKintoB(K, B(Rvu , Sxw ))“ (Algorithmus 3.7) ersetzt. Algorithmus
3.8 zur Aufzählung aller maximalen CST von R und S mit Mindestgröße m orientiert
sich an Algorithmus 3.4 (EnumMinSizeMaximalCSTI). Zu beachten ist, dass in dem dieser
Arbeit beiliegenden Programm die Subtree Isomorphie Prüfung wegen des Umfangs dieser
Arbeit über die Berechnung der Größe eines MCSTI von R und S erfolgt. Falls diese Größe
dem Minimum von |R| und |S| entspricht, ist ein Teilbaum des einen Baumes isomorph
62
KAPITEL 3. ENUMERATION VON COMMON SUBTREES UND CSTI
Eingabe: Baumkanonisierung K, Verweis auf Binärbaum B
1:
if K ist in B enthalten then
return
2:
3:
end if
4:
for all Kanonisierungen K 0 aus B mit |K 0 | > |K| do
if T (K) ist isomorph zu einem Teilbaum von T (K 0 ) // STI Prüfung then
5:
return
6:
end if
7:
8:
end for
9:
Füge K in B ein.
10:
for all Kanonisierungen K 0 aus B mit |K 0 | < |K| do
if T (K 0 ) ist isomorph zu einem Teilbaum von T (K) then
11:
Entferne K 0 aus B.
12:
end if
13:
14:
end for
15:
return
Algorithmus 3.7: InsertKintoB(K, B)
zu dem anderen Baum. Die Ausgabe der maximalen CST mit Mindestgröße kann, im
Gegensatz zu den Maximum CST, erst ganz am Ende erfolgen, da aus dem Binärbaum B
Kanonisierungen gelöscht werden können.
3.6.6
Laufzeit und Speicherverbrauch
In Zeile 5 von Algorithmus 3.5 werden alle MaxWBM bzw. maximalen Matchings aufgezählt. Mit den Bäumen aus Abbildung 3.1 ist diese Anzahl nicht durch ein Polynom
beschränkt. Andererseits existiert für isomorphe Bäume R und S nur ein maximaler CST.
Deshalb sind die hier vorgestellten Algorithmus zur Aufzählung von maximalen und Maximum CST keine polynomial-total-time-Algorithmen.
Der nötige Speicherverbrauch ist ebenfalls nicht durch ein Polynom beschränkt. Wenn
in Algorithmus 3.5, Zeile 6, die in den Binärbäumen GetB(Rvv1 , Sxx1 ) bis GetB(Rvvk , Sxxk )
gespeicherten Kanonisierungen jeweils alle verschieden sind, gibt es mehr als polynomiell
viele verschiedene Kanonisierungen K, die in den Binärbaum B(Rvu , Sxw ) eingefügt werden.
3.6.7
Enumeration von Teilbäumen, auf denen ein Isomorphismus existiert
In diesem Abschnitt wird beschrieben, wie zu zwei Bäumen R und S alle Paare (R0 , S 0 )
von Teilbäumen von R und S aufgezählt werden, auf denen mindestens ein Isomorphismus
ϕ : V (R0 ) → V (S 0 ) existiert. Außerdem soll für alle Isomorphismen ϕ0 : V (R0 ) → V (S 0 )
3.6. ENUMERATION VON COMMON SUBTREES
63
Eingabe: Zwei Bäume R und S, Mindestgröße m
Ausgabe: Alle maximalen CST von R und S mit einer Mindestgröße von m.
1:
B←∅
2:
if SizeMCSTI(R, S) < m then
3:
return Es gibt keinen CST mit einer Mindestgröße von m.
4:
end if
5:
for all r ∈ RSTR mit I(r) < I(r) do
6:
7:
for all s ∈ RSTS do
if D(r, s) + D(r, s) ≥ m then
8:
for all Kanonisierungen K1 aus GetB(r, s) mit |K1 | ≥ m − D(r, s) do
9:
for all Kanonisierungen K2 aus GetB(r, s) mit |K2 | ≥ m − |K1 | do
10:
K ← K1 ; K2
11:
Erhöhe die erste Zahl der Zahlenfolge K um |K2 |.
12:
Berechne T 0 := T (K) und bestimme den Wurzelknoten w, wie in Abschnitt
3.6.4 beschrieben.
13:
Berechne K 0 := K(T 0 ).
14:
InsertKintoB(K 0 , B) // Einfügen mit Subtree Isomorphie Prüfung
end for
15:
16:
17:
18:
end for
end if
end for
19:
end for
20:
Gebe alle Baumkanonisierungen in B aus.
Algorithmus 3.8: EnumMinSizeMaximalCST(R, S, m)
gelten, dass diese maximal bezüglich R und S, also nicht erweiterbar, sind. Dabei gelte
(R10 , S10 ) 6= (R20 , S20 ) genau dann, wenn V (R10 ) 6= V (R20 ) ∨ V (S10 ) 6= V (S20 ). Die in Abbildung 3.15 dargestellten Teilbaumpaare (R1 , S) und (R2 , S) erfüllen diese Bedingung. Der
im Folgenden beschriebene Algorithmus enumeriert diese Paare (R0 , S 0 ) von Teilbäumen
anhand der Knotenmengen (V (R0 ), V (S 0 )). Des Weiteren kann die Mindestgröße m von R0
bzw. S 0 als Parameter angegeben werden.
Der Algorithmus zur Enumeration ist mit Algorithmus 3.8 (EnumMinSizeMaximalCST) weitgehend identisch. Statt Kanonisierungen wird ein Tupel von Knotenmengen gespeichert. Jedem Knoten wird dabei eine natürliche Zahl zugeordnet, die alle voneinander
verschieden sind. Die Knotenmengen der beiden Bäume werden dabei jeweils, bezüglich
der Knotennummer sortiert, gespeichert. Wenn ein neues Tupel (VR , VS ) eingefügt werden
soll, kann in Zeit O(|VR | log |VR |) überprüft werden, ob ein identisches Tupel im Binärbaum
vorhanden ist. Falls es nicht vorhanden ist, muss dennoch die Maximalität aller Isomor-
64
KAPITEL 3. ENUMERATION VON COMMON SUBTREES UND CSTI
r1
r2
r3
R1
s1
S
R2
s2
r4
Abbildung 3.15: Enumeration von Teilbäumen, auf denen ein Isomorphismus existiert
phismen für das Tupel (VR , VS ) sichergestellt werden. Dies kann mit einem Teilmengentest
überprüft werden. Wenn bereits ein anderes Tupel (VR0 , VS0 ) mit VR ( VR0 und VS ( VS0
existiert, so wird (VR , VS ) nicht eingefügt, da (VR , VS ) nicht maximal ist. Wenn im Laufe
der Enumeration ein anderes Tupel (VR0 , VS0 ) mit VR ( VR0 und VS ( VS0 gefunden wird, ist
das Tupel (VR , VS ) nicht gültig und muss nachträglich gelöscht werden. Weil die Knoten
nach ihren Nummern sortiert gespeichert sind, gelingt der Teilmengentest in Linearzeit.
Einen entsprechenden Algorithmus anzugeben ist nicht schwierig. Diese Teilmengentests
erfolgen nur zwischen Tupeln unterschiedlicher Größe.
Der Unterschied zu Algorithmus 3.8 (EnumMinSizeMaximalCST) besteht also im Wesentlichen darin, Knotenmengen sortiert zu speichern und zu vergleichen. Der Unterschied
zu Algorithmus 3.5 (GetB) ist ähnlich. Auch dieser wird entsprechend so modifiziert, dass
Tupel von Knotenmengen gespeichert werden. Die Speicherung erfolgt wie zuvor in einem
sortierten Binärbaum. Die Sortierung erfolgt dabei lexikographisch in Bezug auf die aneinandergereihten Knotennummern. Falls der Parameter m der Größe eines MCST von R
und S entspricht, sind keine Teilmengentest nötig.
Auf eine formale Angabe von Algorithmen kann wegen der großen Ähnlichkeit zu Algorithmen 3.5 und 3.8 verzichtet werden.
Laufzeit und Speicherplatzverbrauch
Bezüglich Laufzeit gilt die gleiche Aussage wie zur Enumeration von CST. Die Laufzeit
zur Enumeration aller MaxWBM bzw. maximalen Matchings ist bei einem entsprechenden bipartiten Graphen nicht polynomiell beschränkt. Dennoch ist die einzige Lösung für
isomorphe Bäume R und S das Teilbaumpaar (R, S).
Zur Speicherplatzabschätzung seien Bäume R und S wie in Abbildung 3.1 gegeben,
wobei R insgesamt k + 1 Knoten und S insgesamt 2k + 1 Knoten habe. Dann entspricht
die Anzahl der Teilbaumpaare, die gleichzeitig im Binärbaum B gespeichert werden müssen, der Anzahl der k-elementigen Mengen einer 2k-elementigen Menge. Diese Anzahl ist
kombinatorisch durch 2k
k bestimmt und somit nicht durch ein Polynom beschränkt.
3.6. ENUMERATION VON COMMON SUBTREES
65
Es handelt sich demnach weder um einen polynomial-total-time-Algorithmus, noch um
einen polynomial-space-Algorithmus.
3.6.8
Beschleunigungstechniken
Im Folgenden werden einige Möglichkeiten dargestellt, die Berechnung der in Abschnitt 3.6
vorgestellten Algorithmen situativ zu beschleunigen. Bis auf letztgenannte wurden diese in
dem dieser Arbeit beiliegenden Programm umgesetzt.
Wenn R in S enthalten ist, ist der einzige maximale CST ein zu R isomorpher Baum.
Wegen des zuvor aufgerufenen Algorithmus von Edmonds lässt sich das in konstanter Zeit
feststellen. Die Ausgabe in kanonischer Form gelingt dann in Zeit O(|VR |2 ). Falls S in R
enthalten ist, gilt die Aussage analog.
Falls R und S isomorph sind, existiert nur eine Lösung für das in Abschnitt 3.6.7 vorgestellte Problem. Diese besteht aus den Bäumen R und S, denn zwischen allen anderen
Teilbäumen R0 ⊂ R und S 0 ⊂ S, auf denen ein Isomorphismus existiert, existiert mindestens auch ein nicht maximaler Isomorphismus. Die Knotenmenge der Bäume kann in
Linearzeit O(|R| + |S|) ausgegeben werden.
Die obigen Prüfungen erfolgen nicht nur auf den Bäumen R und S, sondern auch in
Algorithmus 3.5 (GetB) während der dynamisches Programmierung, zwischen Zeile 1 und
2. Falls die genannten Fälle auf ein Paar (r, s) von gewurzelten Teilbäumen zutreffen,
wird das einzige Element im Binärbaum B(r, s) entsprechend festgelegt. Im Fall von CST
wird die Kanonisierung für den gewurzelten Teilbaum, der in dem anderen enthalten ist,
berechnet und im Binärbaum B(r, s) gespeichert. Die Kanonisierungen für die Kinder,
deren Kinder usw. werden dabei in den zugehörigen Binärbäumen gespeichert und stehen
damit für andere Berechnungen zur Verfügung. Im Fall von Teilbäumen nach Abschnitt
3.6.7 werden analog die Knotenmengen sortiert gespeichert. Dies gilt auch für die Kinder,
deren Kinder usw. Zeilen 2 bis 13 in Algorithmus 3.5 werden in den genannten Fällen nicht
mehr ausgeführt.
Die Berechnungszeit zur Enumeration von MCST kann durch weitere Änderungen am
modifizierten Algorithmus von Uno aus Abschnitt 3.2.2 verringert werden. Seien für Knoten
x0 und x00 die gewurzelten Bäume Sxx0 und Sxx00 isomorph. Wenn ein Knoten v 0 im aktuellen
Matching M über eine Matchingkante mit x0 verbunden ist, führt ein alternierender Kreis
über die Kanten e = v 0 x0 und v 0 x00 in den Teilproblemen G+ (e) und G− (e) zu identischen
Kanonisierungen, da in B(Rvv0 , Sxx0 ) und B(Rvv0 , Sxx00 ) genau die gleichen Kanonisierungen
gespeichert sind, und alle Knoten v 00 , die mit x00 verbunden werden können, auch mit
x0 verbunden werden können. Solche Kreise werden verboten. Für isomorphe gewurzelte
Teilbäume Rvv0 und Rvv00 gilt analoges. Desto mehr der gewurzelten Teilbäume isomorph
sind, desto weniger Matchings werden enumeriert. Die Enumeration von maximalen CST
lässt sich ähnlich beschleunigen, indem die Aufzählung der maximalen Matchings entspre-
66
KAPITEL 3. ENUMERATION VON COMMON SUBTREES UND CSTI
chend modifiziert wird, so dass dort Zuordnungen der Kanten übersprungen werden, die
zu gleichen CST führen.
Bezüglich der Laufzeit- und Speicherplatzanalysen aus Abschnitt 3.6.6 und 3.6.7 ändern
diese Beschleunigungstechniken nichts. Es lassen sich jeweils Bäume R und S angeben, in
denen diese Techniken nur selten oder gar nicht genutzt werden können und somit nur
einen geringen oder gar keinen Einfluss auf Laufzeit und Speicherverbrauch haben.
3.7
Parallelisierung
In diesem Abschnitt wird beschrieben, wie Algorithmus 3.3 (EnumMaximalCSTI) parallelisiert werden kann. Dabei stehen die praktischen Laufzeiten auf handelsüblichen DesktopPCs im Vordergrund. Die Enumeration maximaler CSTI mit Mindestwert und Maximum
CSTI lässt sich analog parallelisieren. Dabei muss dann zusätzlich die Mindestgröße der
CSTI sichergestellt werden bzw. es müssen Maximum anstelle von maximalen Matchings
enumeriert werden.
Erste Testläufe des Programms ergaben, dass die Gesamtzeit zur Enumeration vor allem von der Anzahl der Isomorphismen abhängt und nur zu einem geringen Anteil von der
Vorabberechnung des Algorithmus von Edmonds. In Tabelle 4.2 sind diese Zeiten für Bäume verschiedener Größen angegeben. Falls nur maximale CSTI enumeriert werden sollen,
wird der Algorithmus von Edmonds gar nicht benötigt, vgl. Algorithmus 3.3.
Die Idee zur Parallelisierung besteht darin, die Schleifen in Zeile 1 und 2 aus Algorithmus 3.3 aufzulösen und stattdessen eine Queue zu generieren, in der alle Paare (r, s)
von gewurzelten Teilbäumen enthalten sind. Dann werden vom Hauptprogramm k nebenläufige Prozesse gestartet. Diese greifen unter Verwendung eines Mutex auf diese Queue
zu und nehmen jeweils das vorderste Paar (r, s) aus der Queue. Auf diesem Paar finden
dann die Berechnungen aus Algorithmus 3.3, Zeile 3 bis 8, statt. Wenn die Queue leer ist,
beendet sich der entsprechende nebenläufige Prozess. Sobald alle k nebenläufigen Prozesse
beendet wurden, sind alle CSTI bestimmt worden. Zu beachten ist, dass beim Aufruf des
Algorithmus zur Bestimmung aller maximalen CSTI ϕ1 von (r, s) bzw. ϕ2 von (r, s) lokale
Variablen verwendet werden, wie in Abschnitt 3.3.1 beschrieben wurde. Es ist deshalb nötig,
für jeden Prozess eine eigene Kopie dieser Variablen bereitzustellen. Algorithmus 3.9 stellt
den Hauptalgorithmus dar, der die nebenläufigen Prozesse, dargestellt in Algorithmus 3.10
aufruft. Bei der Ausgabe der Isomorphismen ist darauf zu achten, dass die verschiedenen
Prozesse einen Mutex verwenden oder die Isomorphismen in getrennten Speicherbereichen
oder Dateien abgelegt werden.
Es hat sich herausgestellt, dass nicht nur von Variablen, auf die schreibend zugegriffen
wird, Kopien erstellt werden sollten, sondern auch von den Daten, auf die ausschließlich
lesend zugegriffen wird. Dies betrifft insbesondere die Bäume der Eingabe. Dies führte zu
einer weiteren Verringerung der Berechnungszeit. Die Verwendung von Mutexen konnte
3.7. PARALLELISIERUNG
67
Eingabe: Zwei Bäume R und S, Anzahl an nebenläufigen Prozessen k
Ausgabe: Alle maximalen Common Subtree Isomorphismen von R und S
1:
Erstelle eine Queue Q und füge alle Paare (r, s) von gewurzelten Teilbäumen mit I(r) <
I(r) in die Queue ein.
2:
3:
for i=1 to k do
Führe ConcurrentEnumMaximalCSTI(R,S,Q,i) als nebenläufigen Prozess aus.
4:
end for
5:
Warte auf die Beendigung aller nebenläufigen Prozesse.
Algorithmus 3.9: EnumAllMaximalCSTI(R, S, k)
Eingabe: Zwei Bäume R und S, Prozessnummer i, Queue Q
Ausgabe: Ein Teil der maximalen Common Subtree Isomorphismen von R und S
1:
if Q nicht leer then
2:
Nimm das nächste Element (r, s) mit Hilfe eines Mutex aus der Queue Q.
3:
while GetMaximalCSTI(r, s, ϕ1 ) = 1// vgl. Abschnitt 3.3.1 do
4:
(i)
(i)
while GetMaximalCSTI(r, s, ϕ2 ) = 1 do
(i)
(i)
Verbinde die Isomorphismen ϕ1 und ϕ2 der gewurzelten Teilbäume zu einem
5:
maximalen CSTI ϕ(i) von R und S.
Gebe ϕ(i) unter Beachtung der Nebenläufigkeit aus.
6:
7:
8:
9:
end while
end while
end if
Algorithmus 3.10: ConcurrentEnumMaximalCSTI(R, S, Q, i)
als unproblematisch nachgewiesen werden. Diese haben keinen messbare Auswirkung auf
die Laufzeit. Sehr problematisch ist der Unterschied zwischen Release- und Debugmodus.
Während im Debugmodus relativ gesehen sehr gute Resultate erzielt werden, ist die Berechnungsgeschwindigkeit im Releasemodus nur teilweise linear mit der Anzahl der Prozesse
skalierend. Die genaue Ursache dafür konnte während der Arbeit nicht ermittelt werden.
Aus diesem Grund wurde die Parallelisierung der Algorithmen nicht weiter verfolgt. In
Abschnitt 4.1.1 erfolgen Laufzeitvergleiche unter Nebenläufigkeit.
68
KAPITEL 3. ENUMERATION VON COMMON SUBTREES UND CSTI
Kapitel 4
Experimentelle Resultate
In diesem Kapitel werden die experimentellen Resultate des Programms für verschiedene
Eingaben und die verschiedenen in Kapitel 3 vorgestellten Verfahren analysiert. Sämtliche Berechnungen in diesem Kapitel wurden auf einer Intel Core I5 3570K 4-Kern CPU
durchgeführt. Als Eingabe für das Programm dient die Standardkonfigurationsdatei, die im
Anhang A.2 beschrieben ist. In dieser ist die Speicherung von bis zu zehntausend MaxWBM
pro Paar von gewurzelten Teilbäumen aktiviert. Die Kanten aus R werden möglichst mittig
gewählt. Das Standardverfahren zur Vermeidung gleicher CSTI ist die Erkennung über die
Ordnungsfunktion. Der Algorithmus von Uno, sowie Knoten- und Kantenbezeichner sind
deaktiviert. Davon abweichende Werte, soweit nicht offensichtlich, sind an entsprechender Stelle angegeben. Falls in den Tabellen unter Baumkanten nur eine Zahl steht, haben
beide Bäume diese Anzahl an Kanten. Bei den Bäumen handelt es sich um zufällig mit
OGDF [23] erzeugte Bäume, wenn nichts anderes angegeben ist. Die Erzeugung beginnt
mit einem Baum, der aus genau einem Knoten besteht. Dann erfolgt eine zufällige Auswahl
eines Knotens. Dieser wird mit einem neu erzeugten Knoten durch eine Kante verbunden.
Das Vorgehen wird so oft wiederholt, bis die gewünschte Größe erreicht ist. Bei Größenangaben ist T die Abkürzung für Tausend und M für Millionen. Die angegebenen Werte
sind gerundet. In Abschnitt 4.1 wird die Enumeration von Common Subtree Isomorphismen untersucht. Abschnitte 4.2 und 4.3 evaluieren die Enumeration von Common Subtrees
und den Teilbaumpaaren aus Abschnitt 3.6.7. In allen Abschnitten werden zunächst die
verschiedenen Ergebnisse vorgestellt und im Anschluss daran erfolgt eine Analyse und
Bewertung. Dabei wird Bezug auf die theoretischen Überlegungen genommen.
4.1
Common Subtree Isomorphismen
In diesem Abschnitt werden die verschiedenen Varianten von Common Subtree Isomorphismen aus Abschnitt 3.3 und 3.4 untersucht. Die in Abschnitt 4.1.1 vorgestellten Ergebnisse
werden in Abschnitt 4.1.2 bewertet.
69
70
KAPITEL 4. EXPERIMENTELLE RESULTATE
Kanten
Zeit
CSTI
CSTI pro s
verworfen
25
0,19 s
2,51 M
13,3 M/s
4,1 %
30
1,36 s
17,00 M
12,6 M/s
2,2 %
35
8,06 s
90,00 M
11,2 M/s
3,5 %
40
71,50 s
831,00 M
11,6 M/s
2,8 %
45
544,00 s
6344,00 M
11,7 M/s
1,1 %
Tabelle 4.1: Maximale CSTI - Jeweils 10 Durchläufe
4.1.1
Ergebnisse der Programms
Maximale Common Subtree Isomorphismen
In Tabelle 4.1 ist das starke Wachstum der Anzahl der Lösungen zu beobachten. Nach Satz
3.9 ist die worst case Laufzeit quadratisch von der Größe eines MCSTI abhängig. Die praktische Laufzeit pro Isomorphismus sinkt jedoch nur langsam mit steigender Kantenzahl.
Außerdem ist noch das Verhältnis der von der Ordnungsfunktion I verworfenen Matchings
zur Gesamtzahl der berechneten Matchings angegeben (verworfen).
Maximum Common Subtree Isomorphismen
In Tabelle 4.2 sind die Laufzeiten zur Berechnung von Maximum CSTI dargestellt. Zur
Enumeration der MaxWBM wurde der modifizierte Algorithmus von Uno genutzt. Die
Tabelle ist um die Laufzeit des Algorithmus von Edmonds ergänzt. Dies schließt die Neuberechnungen bei den Kantenlöschungen mit ein. Der Anteil an der Gesamtlaufzeit ist nur
bei kleinen Eingabegrößen signifikant. Insbesondere die nah beieinander liegenden Zeiten
bei der Berechnung mit Hilfe der Ordnungsfunktion und durch Kantenlöschung sind zu
beachten. Außerdem ist in der Spalte |MCSTI| die durchschnittliche Größe eines MCSTI
angegeben.
Maximale Common Subtree Isomorphismen mit Mindestwert
In Abbildung 4.1 sind für zwei zufällige Bäume mit 50 Kanten die Anzahl der maximalen
CSTI der Mindestgröße 2, das entspricht allen maximalen CSTI, bis 34, das entspricht den
Maximum CSTI, die benötigte Laufzeit und die berechneten Isomorphismen pro Sekunde
angegeben.
Vergleich Maximale CSTI - Baumalgorithmus gegen Reduktion auf VPG und
Auffinden von c-zusammenhängenden Cliquen
In Tabelle 4.3 wird die Laufzeit von Algorithmus 3.3 (EnumMaximalCSTI) mit der Laufzeit
der Reduktion auf den VPG und das Finden von c-zusammenhängenden Cliquen vergli-
4.1. COMMON SUBTREE ISOMORPHISMEN
Kanten
Zeit
MCSTI
MCSTI pro s
71
Edmonds
verworfen
|MCSTI|
Vermeidung gleicher Isomorphismen mit Ordnungsfunktion
40
0,23 s
1M
3,55 M/s
121 ms
2,28 %
27,9
50
13,83 s
118 M
8,52 M/s
180 ms
0,01 %
34,1
60
13,55 s
68 M
5,00 M/s
271 ms
0,01 %
40,1
70
494,12 s
4412 M
8,93 M/s
372 ms
<0,001 %
45,7
Vermeidung gleicher Isomorphismen durch Kantenlöschung
40
0,28 s
1M
2,97 M/s
182 ms
-
27,9
50
14,10 s
118 M
8,37 M/s
289 ms
-
34,1
60
13,56 s
68 M
5,00 M/s
422 ms
-
40,1
70
468,09 s
4412 M
9,43 M/s
594 ms
-
45,7
Tabelle 4.2: Maximum CSTI - Jeweils 10 Durchläufe
Kanten
Isomorphismen
Zeit CSTI
Zeit CCISGI
Zeit CCISGI/CSTI
15
45 T
8 ms
0,28 s
35
18
118 T
16 ms
1,19 s
74
20
290 T
29 ms
4,35 s
150
22
556 T
49 ms
12,83 s
262
25
2506 T
189 ms
86,09 s
456
Tabelle 4.3: Maximale CSTI bzw. CCISGI - Jeweils 10 Durchläufe
chen, um daraus die maximalen CCISGI zu erhalten. Insbesondere die letzte Spalte, die
den Zeitfaktor zwischen dem Reduktions-Algorithmus und dem Baumalgorithmus angibt,
ist zu beachten.
MCSTI mit verschiedener Wahl der Kantenreihenfolge in R
In Tabelle 4.4 sind die benötigte Zeit und die benötigten Rekursionen zum Auffinden aller
MCSTI in Bäumen mit 50 bzw. 55 Kanten angegeben. Dabei erfolgte die Auswahl der
Kanten in R in der Reihenfolge, wie die Kanten im Baum der Eingabe eingelesen werden (Eingabe), in einer Reihenfolge, die eine Kante möglichst in der Mitte wählt (Mitte),
und einer zufälligen Reihenfolge (Zufall). Identische Isomorphismen wurden durch Kantenlöschung vermieden. Die Auswahl der Reihenfolge hat einen nicht zu vernachlässigenden
Einfluss auf die Zahl der Rekursionen und auf die Laufzeit.
Vergleich MaxWBM und MaxWBM’
In Abbildung 4.2 wird die Enumeration von MCSTI und MCWSTI mit Hilfe von MaxWBM’ (Aufzählung aller maximalen Matchings, nur Maximum Matchings behalten) und
72
KAPITEL 4. EXPERIMENTELLE RESULTATE
Isomorphismenl(Millionen)
Zeitl(s),lIsomorphismenlinlM/s
30
300
25
250
20
200
15
150
10
100
5
50
0
0
2
6
10
14
18
22
26
30
34
MindestgrößelderlmaximalenlCSTI
Zeitl(s)
Isomorphismenl(M)
IsomorphismenlinlM/s
Abbildung 4.1: Anzahl der maximalen CSTI mit Mindestgröße (x-Achse) - Bäume mit 50 Kanten
Kanten
Kantenwahl
Zeit
Rekursionen
Rekursionen pro s
Edmonds
50
Eingabe
12,1 s
547 M
45,2 M/s
285 ms
50
Mitte
14,0 s
675 M
48,2 M/s
273 ms
50
Zufall
15,0 s
705 M
47,0 M/s
404 ms
55
Eingabe
17,6 s
982 M
55,8 M/s
330 ms
55
Mitte
23,3 s
1243 M
53,3 M/s
340 ms
55
Zufall
24,1 s
1280 M
51,3 M/s
507 ms
Tabelle 4.4: MCSTI mit verschiedener Kantenauswahl - Jeweils 10 Durchläufe
MaxWBM (Modifizierter Algorithmus von Uno [27]) verglichen. Bei den MCWSTI sind
4 verschiedene Knoten- und Kantenbezeichner mit insgesamt 10 verschiedenen Gewichten
vorhanden. Die Zeiten stellen die Enumerationszeit ohne den Algorithmus von Edmonds
dar. Bei der Enumeration wurde die Speicherung von Matchings deaktiviert. Zusammen
mit Bezeichnern und erhöhter Kantenzahl ist die Enumeration mit dem modifizierten Algorithmus von Uno besser, ansonsten die Enumeration mit den MaxWBM’. Die zufälligen
Bäume mit 60 Kanten hatten weniger MCSTI als die Bäume mit 50 und 55 Kanten. Damit
lässt sich der lokale Tiefpunkt der dunkelroten Kurve begründen.
4.1. COMMON SUBTREE ISOMORPHISMEN
73
Zeit'(s)
Zeit'(s)
7
280
6
240
5
200
4
160
3
120
2
80
1
40
0
30
60
100
140
180
220
40
45
50
55
60
65
0
Anzahl'Kanten
MCWSTI'mit'MaxWBM'
MCSTI'mit'Uno
MCWSTI'mit'Uno
MCSTI'mit'MaxWBM'
Abbildung 4.2: Enumerationszeiten für MCSTI und MCWSTI, jeweils 10 Durchläufe
Feature Trees
Die Bäume in der FTree-Datenbank besitzen 3 bis etwa 15 Knoten. Das Einlesen und ein
paarweiser Vergleich der ersten 1000 Feature Trees benötigte 5 Minuten und 37 Sekunden.
Dabei wurden die 50 Paare gespeichert, die die größte Ähnlichkeit haben. Die Ähnlichkeit
von 2 Feature Trees F = (VF , EF ), G = (VG , EG ) wurde in dieser Arbeit als Quotient
Q(F, G) :=
SizeMCSTI(F,G)
max{|VF |,|EF |}
c(0, 0) = 1 und c(a, b) =
definiert. In Abschnitt 3.5 wurde die Vergleichsfunktion c durch
2min(a,b)
a+b
für a + b > 0 definiert. Es gilt folglich c(a, b) ∈ [0, 1].
Das ist genau der Wert, der 2 Knoten, die im MCWSTI einander zugeordnet werden, zum
Gewicht beitragen. Es gilt folglich Q(F, G) ∈ [0, 1] und Q(F, F ) = 1. Für die Feature
Trees „54695776“ und „54678160“ beträgt dieser Quotient 1. Die Feature Trees sind in
Abbildung 4.3 dargestellt. Die Zahl gibt die Anzahl der Nicht-Wasserstoff-Atome an, die
durch den Knoten repräsentiert werden. Der Quotient überrascht nicht, wie ein Vergleich
der chemischen Struktur zeigt.
• O=C1N(.)C(.)==C(.)C(.)=C1(.)_C(.)=2CCCCC2(.)_N=1C(.)=C(.)C=CC1_O(.)
_N(.)(.)_C(.)(.)_C(.)(.)_O=C(.)(.)_C(.)_C(.)_ (54695776)
• O=C1N(.)C(.)==C(.)C(.)=C1(.)_C(.)=2CCCCC2(.)_N=1C(.)=C(.)C=CC1_O(.)
_O(.)_N(.)(.)_C(.)(.)_C(.)(.)_O=C(.)(.)_C(.)_ (54678160)
Nur anhand der Knotenverbindungen und der Anzahl der Atome lassen sich diese Moleküle
nicht unterscheiden. Die Datensätze in der FTree-Datenbank enthalten noch weitere Informationen, die bei diesen Strukturen weitgehend übereinstimmen. Allerdings berücksichtigt
74
KAPITEL 4. EXPERIMENTELLE RESULTATE
1
54695776
54678160
6
6
1
2
1
1
1
5
1
2
1
1
1
6
1
6
1
5
1
Abbildung 4.3: Feature Trees „54695776“ und „54678160“
|R| < |S|
|S| < |R|
Kanten
Enumeration
Edmonds
Enumeration
Edmonds
10, 100
71 ms
93 ms
77 ms
201 ms
10, 150
212 ms
147 ms
224 ms
359 ms
10, 250
672 ms
248 ms
733 ms
729 ms
10, 500
2725 ms
521 ms
2947 ms
1895 ms
Tabelle 4.5: Maximum CSTI mit Bäumen verschiedener Größen - Jeweils 10 Durchläufe
das dieser Arbeit beiliegende Programm nicht alle der gegebenen Informationen. Dazu wären weitergehende Modifikationen, nicht nur an der Berechnung der D-Werte, nötig. Die
genauen Berechnungen sind in [24] beschrieben. Der dazu nötige Aufwand wurde im Rahmen dieser Arbeit als zu groß eingeschätzt. Prinzipiell sollte es aber möglich sein, die in
dieser Arbeit vorgestellten Algorithmen so zu erweitern, dass bessere Vergleiche zwischen
den Feature Trees möglich sind.
MCSTI - Bäume R und S mit verschiedener Kantenanzahl
In diesem Abschnitt wird die Berechnungszeit für Bäume R und S mit verschiedenen
Größen untersucht. Dabei wurde das Verfahren der Kantenlöschung eingesetzt. Die Startwerte für den Zufallszahlengenerator wurden im Fall |S| < |R| vertauscht, so dass jeweils
auf genau den gleichen Bäumen enumeriert wurde. Nicht unerwartet ist der Algorithmus
schneller, wenn R kleiner als S ist. In diesem wird der Algorithmus von Edmonds nicht so
häufig aufgerufen wie im umgekehrten Fall. Ergebnisse finden sich in Tabelle 4.5
4.1. COMMON SUBTREE ISOMORPHISMEN
75
Verfahren
Kantenanzahl
Zeit
verworfen
Ordnungsfunktion
11,10
11,49 s
90,000 %
Kantenentfernung
11,10
1,41 s
-
Ordnungsfunktion
10,11
1,36 s
<0,001 %
Kantenentfernung
10,11
1,36 s
-
Tabelle 4.6: MCSTI - Ordnungsfunktion gegen Kantenlöschung mit Sterngraphen
Modus und
Kantenanzahl
Anzahl Prozesse
1
2
3
4
Debug, 49
157,3 s (100 %)
78,5 s (49,9 %)
52,6 s (33,4 %)
40,3 s (25,6 %)
Release, 49
20,8 s (100 %)
10,5 s (50,3 %)
14,4 s (69,0 %)
10,4 s (50,0 %)
Debug, 51
379,0 s (100 %)
190,3 s (50,2 %)
127,5 s (33,7 %)
97,9 s (25,8 %)
Release, 51
50,7 s (100 %)
25,2 s (49,7 %)
17,0 s (33,5 %)
22,8 s (45,0 %)
Release, 53
56,0 s (100 %)
27,8 s (49,7 %)
30,6 s (54,7 %)
39,5 s (70,6 %)
Release, 55
114,2 s (100 %)
57,3 s (50,2 %)
48,4 s (42,4 %)
72,4 s (63,4 %)
Tabelle 4.7: Maximale CSTI unter Nebenläufigkeit - Jeweils ein Durchlauf
Ordnungsfunktion gegen Kantenlöschung
In Abschnitt 3.4.1 wurde ein zusätzlicher Zeitfaktor von O(m) für die Ordnungsfunktion
angegeben, wenn m die Größe eines CSTI ist. Dieser soll praktisch nachgewiesen werden.
R und S wurden wie in Abbildung 3.1 mit mit |R| = |S| + 1 gewählt. Das Speichern von
Matchings wurde deaktiviert. Die Ergebnisse sind in Tabelle 4.6 dargestellt.
Parallelisierung der Enumeration von maximalen CSTI
In Tabelle 4.7 ist die benötigte Laufzeit für Bäume verschiedener Größen, jeweils im Debugund Releasemodus, aufgeführt. Die Anzahl der nebenläufigen Prozesse wurde dabei von 1
bis 4 variiert. Die Zahl in Klammern stellt die relative Zeit bezogen auf die nicht parallelisierte Berechnung mit einem Prozess dar. Auffällig ist die hohe relative Effizienz von
mehreren Prozessen im Debugmodus. Im Releasemodus schwanken die Ergebnisse, abhängig von der Anzahl der Kanten und nebenläufigen Prozesse. Für eine feste Einstellung sind,
auf dem selben Rechner, recht ähnliche Ergebnisse reproduzierbar.
4.1.2
Analyse und Bewertung
Aus den Tabellen und Diagrammen aus Abschnitt 4.1 lassen sich mehrere interessante
Ergebnisse ableiten. Ein sehr wichtiges Ergebnis ist die hohe Effizienz der Ordnungsfunktion I auf Zufallsbäumen. Bei den maximalen CSTI in Tabelle 4.1 werden im Schnitt
76
KAPITEL 4. EXPERIMENTELLE RESULTATE
2,7 % der Matchings von der Ordnungsfunktion verworfen, bei den Maximum CSTI im
Schnitt sogar unter 1 %. Für speziell konstruierte Beispiele erhöht sich mit der Ordnungsfunktion die Laufzeit um einen Faktor O(m) gegenüber der Kantenlöschung, wenn m die
Größe eines MCSTI ist. In Tabelle 4.6 ist dazu ein Beispiel angegeben. Dieser Verhalten
wurde in Abschnitt 3.4.1 vorhergesagt. Dass Algorithmus 3.3 (EnumMaximalCSTI) kein
polynomial-delay-Algorithmus ist, hat wegen der geringen Zahl der verworfenen Matchings
auf Zufallsbäumen fast keinerlei Auswirkung.
Nach Tabelle 4.4 ist in Bezug auf die Wahl der Kantenreihenfolge, bei gleichen Eingaben, ein linearer Zusammenhang zwischen der Anzahl der Rekursionen und der benötigten
Enumerationszeit zu erkennen. Zunächst überrascht es, dass der Start von einer mittleren
Kante aus eher unterdurchschnittliche Ergebnisse liefert. Die Argumentation für einen Start
in der Mitte war der Algorithmus von Edmonds. Dieser sollte möglichst selten ausgeführt
werden. Der Tabelle ist zu entnehmen, dass das auch gelungen ist. Bei einer Reihenfolge
der Eingabe entsprechend, und von der mittleren Kante beginnend, ist die Zeit für den
Algorithmus von Edmonds, bis auf vernachlässigbare Unterschiede, identisch. Mit der Zufallsauswahl werden schlechtere Ergebnisse erzielt. Da die Zeit des Algorithmus, außer bei
sehr kleinen Bäumen, nur einen geringen Anteil an der Gesamtzeit ausmacht, ist vor allem
die Enumerationszeit entscheidend.
Für die unterschiedliche Anzahl an Rekursionen gibt es eine Begründung. Dazu wird
Algorithmus 3.1 (EnumMaximumCSTI), Zeile 5 und 6, genauer untersucht. Sei dazu k die
Anzahl der MCSTI auf dem Paar gewurzelter Teilbäume (r, s) und l die Anzahl der MCSTI
auf dem Paar (r, s). Jeder MCSTI ϕ2 von (r, s) wird k mal berechnet. Die Gesamtzahl Z1
der Rekursionen für diese Wahl von r und s ergibt sich somit aus der Summe der Rekursionen auf (r, s) plus k mal den Rekursionen auf (r, s). Für eine andere Ordnungsfunktion
I2 gilt möglicherweise I2 (r) > I2 (r). Dann liegt die Gesamtzahl Z2 der Rekursionen bei
l mal den Rekursionen auf (r, s) plus den Rekursionen auf (r, s). Diese beiden Anzahlen
sind im Allgemeinen nicht identisch. I2 kann auch eine ganz andere Reihenfolge festlegen,
so dass dann die Anzahl ebenso abweichen kann. Als Ergebnis lässt sich festhalten, dass
die Reihenfolge der Kantenauswahl insbesondere von einer möglichst günstigen Wahl für
Z1 und Z2 abhängig sein sollte.
Ein weiteres interessantes Ergebnis ist die hohe Effizienz der Enumeration von maximalen CSTI mit Mindestgröße. Nach Abbildung 4.1 (grüne Linie) erfolgt die Aufzählung
von maximalen CSTI ohne Mindestgröße am schnellsten. Obwohl nachgewiesen werden
konnte, dass der Algorithmus zur Berechnung von maximalen CSTI mit Mindestgröße
kein polynomial-total-time-Algorithmus ist, ist er bei Zufallsbäumen sehr effizient. Die Geschwindigkeit der Enumeration sinkt nur langsam und recht gleichmäßig ab. Dass sich
maximale CSTI in diesem Beispiel und auch im Allgemeinen schneller als Maximum CSTI
enumerieren lassen, geht aus den Sätzen zur Laufzeit der beiden Probleme hervor.
4.1. COMMON SUBTREE ISOMORPHISMEN
77
Im direkten Vergleich der Enumeration von maximalen Isomorphismen mit dem auf
Bäume spezialisierten Algorithmus 3.3 (EnumMaximalCSTI) und dem Algorithmus für
allgemeine Graphen über der Reduktion auf das Cliquen-Problem zeigt sich, dass mit
zunehmender Anzahl der Kanten der spezialisierte Algorithmus im Verhältnis immer besser
wird. Auch die absoluten Zeiten zeigen sehr deutlich die Vorteile von Algorithmus 3.3 auf.
Dieser sollte deshalb unbedingt dem allgemeinen Algorithmus vorgezogen werden, wenn es
sich bei der Eingabe um zwei Bäume handelt.
Der modifizierte Algorithmus von Uno benötigt im worst case, bezogen auf die Anzahl
der Knoten, quadratische Zeit. Abhängig von der Anzahl der Hilfsknoten und dem zulässigen Teilgraphen kann die durchschnittliche Zeit deutlich darunter liegen. Das Verhältnis
von maximalen zu Maximum Matchings sei als Q :=
a
b
definiert, wobei a der Anzahl der
maximalen und b der Anzahl der Maximum Matchings entspricht. Die durchschnittliche
Zeit, ein Maximum Matching durch Aufzählung aller maximalen Matchings zu finden, beträgt Θ(Q), wie sich aus Abschnitt 3.2.2 folgern lässt. Anhand Abbildung 4.2 lässt sich
ablesen, dass bei größeren Bäumen und insbesondere Bezeichnern der modifizierte Algorithmus von Uno besser ist. Dieses Ergebnis ist nicht unerwartet. Ein hoher Knotengrad
lässt Q tendenziell schneller wachsen als die durchschnittliche Laufzeit im modifizierten
Algorithmus von Uno. Bezeichner führen tendenziell zu einem höheren Wert Q und weniger Kanten im zulässigen Teilgraphen. Dies begünstigt den modifizierten Algorithmus von
Uno. An dieser Stelle ist eine Heuristik denkbar, die je nach Knotenzahl und dem Vorhandensein von Bezeichnern die eine oder die andere Methode zur Enumeration der Maximum
Matchings auswählt. Die Speicherung der Maximum Matchings sollte dennoch ausgewählt
werden. Für die untersuchten Bäume mit 60 Kanten beträgt die Berechnungszeit mit Speicherung der Matchings 13,5 Sekunden, wie Tabelle 4.2 zu entnehmen ist. Nach Abbildung
4.2 beträgt die Zeit ohne Speicherung 28,3 Sekunden (Aufzählung) bzw. 52,3 Sekunden
(Uno) und liegt damit deutlich darüber.
Die Evaluierung mit Feature Trees als Eingabe führte zu einem Fund von zwei Molekülen mit sehr ähnlichen Strukturen. Die benötigte Zeit von knapp 6 Minuten für 499500 Aufrufe des Algorithmus von Edmonds lässt vermuten, dass dieser Algorithmus ein probates
Mittel ist, ähnliche chemische Strukturen aufzufinden. Dazu sind aber weitere Modifizierungen am Quellcode nötig. So müssten beispielsweise die D-Werte nicht über Matchings
berechnet werden, sondern über eine combine function genannte Funktion [24]. Außerdem
sind Moleküle im Allgemeinen keine Baumstrukturen [24], so dass eine Analyse mit den in
dieser Arbeit entwickelten Enumerationsalgorithmen nur über einen Umweg, beispielsweise
der Darstellung durch Feature Trees, erfolgen kann.
Nach Tabelle 4.5 ergibt sich, dass bei Bäumen mit verschiedenen Größen der Baum
R der kleinere Baum sein sollte, wenn Maximum CSTI mit Hilfe von Kantenlöschungen
enumeriert werden sollen. Die Laufzeit des Algorithmus von Edmonds ist unabhängig von
der Reihenfolge der Bäume. Wenn R kleiner ist, gibt es weniger Kanten, die gelöscht
78
KAPITEL 4. EXPERIMENTELLE RESULTATE
werden können. Die in Theorem 3.8 angegebene Schranke von |VR | + 2 − m Aufrufen für
den Algorithmus von Edmonds spiegelt sich in den praktischen Laufzeitergebnissen wieder.
Für die in der Tabelle angegebenen Zufallsbäume beträgt die Größe eines MCSTI jeweils
11. Mit R als kleinerem Baum gilt |VR | + 2 − m = 11 + 2 − 11 = 2. Falls R der größere
Baum ist, ist dieser Wert deutlich größer. Die praktischen Resultate orientieren sich an
den theoretisch vorhergesagten Ergebnissen.
In Bezug auf Nebenläufigkeit entsprechen die erzielten Ergebnisse nur teilweise den
Erwartungen. Im Debugmodus verhält sich die Laufzeit antiproportional in Bezug zur Anzahl der nebenläufigen Prozesse. Das Ergebnis kann somit als sehr gut bewerten werden.
Im Releasemodus sind die relativen Ergebnisse zumindest für zwei nebenläufige Prozesse
genau so gut wie im Debugmodus. Mit drei und vier nebenläufigen Prozessen im Releasemodus sind die Ergebnisse zuweilen schlechter als mit zwei Prozessen. Die Ursache dieses
Verhaltens blieb während der Bearbeitung dieser Arbeit unbekannt. Das Ergebnis zeigt,
dass theoretische Überlegungen in Bezug auf Parallelisierung nicht ohne Weiteres in die
Praxis übertragbar sind und die konkrete Prozessorarchitektur vermutlich einen nicht zu
vernachlässigenden Einfluss hat.
4.2
Common Subtrees
In diesem Abschnitt werden die verschiedenen Varianten von Common Subtrees aus Abschnitt 3.6 untersucht. Die in Abschnitt 4.2.1 vorgestellten Ergebnisse werden in Abschnitt
4.2.2 bewertet.
4.2.1
Ergebnisse der Programms
Maximum Common Subtrees
Tabelle 4.8 zeigt die Zeiten zur Enumeration aller MCST auf Bäumen verschiedener Größe
an. Zu beachten ist die geringe Anzahl von MCST für ein gegebenes Paar von Zufallsbäumen. Der Algorithmus von Edmonds nimmt für alle Baumgrößen einen signifikanten Anteil
an der Gesamtzeit ein.
Maximale Common Subtrees
In Tabelle 4.9 ist die Zeit zur Berechnung von maximalen CST angegeben. Da zur Prüfung
auf Subtree Isomorphie der Algorithmus von Edmonds benutzt wird, steigen die Laufzeiten
bereits für Bäume mit nur wenigen Kanten rasch an. Die Anzahl dieser Prüfungen ist in
der Tabelle angegeben. Auffällig ist, dass die durchschnittliche Zahl an maximalen CST
nicht viel größer als die der Maximum CST ist.
4.2. COMMON SUBTREES
79
Kanten
Zeit
MCST
MCST pro s
Edmonds
|MCST|
20
0,4 s
157
402,0
0,3 s
15,6
50*
0,2 s
19
79,8
0,2 s
34,1
50
2,7 s
221
82,4
1,8 s
33,6
100
16,6 s
337
20,3
7,7 s
61,17
200
141,1 s
486
3,4
32,3 s
112,29
500*
725,0 s
177
0,2
20,7 s
256,80
750*
2235,7 s
1728
0,8
47,2 s
370,9
Tabelle 4.8: Maximum CST - Jeweils 100 Durchläufe (*: 10 Durchläufe)
Kanten
Zeit
CST
CST pro s
STI Prüfungen
15
4,3 s
26
6,1
20 T
17
6,7 s
36
5,4
27 T
20
19,1 s
59
3,1
60 T
20*
1225,0 s
478
0,4
2213 T
22
31,1 s
73
2,4
76 T
24
61,0 s
74
1,2
132 T
25
76,2 s
80
1,0
144 T
Tabelle 4.9: Maximale CST - Jeweils 10 Durchläufe (*: 100 Durchläufe)
Maximale Common Subtrees mit Mindestwert
Abbildung 4.4 zeigt für zwei zufällige Bäume mit 35 Kanten die Anzahl der maximalen
CST der Mindestgröße 0, das entspricht allen maximalen CST, bis 25, das entspricht den
Maximum CST, die benötigte Laufzeit, die Anzahl der Prüfungen auf Subtree Isomorphie
und die berechneten Common Subtrees pro Sekunde. Für die berechneten CST pro Sekunde
ist die Skala logarithmisch dargestellt.
MCST - Bäume R und S mit verschiedener Kantenanzahl
Tabelle 4.10 gibt einen Überblick über die Anzahl an Maximum CST bei Bäumen mit
verschiedenen Größen. Ein größerer relativer Unterschied führt zu einer geringeren Anzahl
an Maximum CST. Dieses Ergebnis überrascht nicht. Wenn ein Baum in einem anderen
enthalten ist, gibt es nur einen Maximum CST. Dieser ist isomorph zu dem Baum, der
enthalten ist.
80
KAPITEL 4. EXPERIMENTELLE RESULTATE
Zeitm(s),mmaximalemCST,mSTI-Prüfungenm(inmT)
maximalemCSTm/ms
30
100
25
20
10
15
1
10
5
0
0
5
10
15
20
25
0,1
MindestgrößemdermmaximalenmCST
Zeitm(s)
CST
STI-Prüfungen
CSTm/ms
Abbildung 4.4: Anzahl der maximalen CST mit Mindestgröße (x-Achse) - Bäume mit 35 Kanten
Kanten
Zeit
MCST
MCS pro s
Edmonds
|MCST|
25, 5
0,1 s
100
1333
0,1 s
6,00
25, 10
0,2 s
113
565
0,2 s
10,71
25, 25
0,6 s
183
288
0,4 s
18,59
25, 100
2,3 s
153
66
1,8 s
25,35
25, 200
4,0 s
107
27
3,7 s
25,97
25, 400
8,1 s
100
3
7,6 s
26,00
25, 100*
12,8 s
100
7,8
12,6 s
26,00
Tabelle 4.10: Maximum CST - Jeweils 100 Durchläufe (*: Sterngraphen)
4.2.2
Analyse und Bewertung
Zunächst lässt sich festhalten, dass die Anzahl der MCST und auch der maximalen CST
wesentlich geringer als die Anzahl der MCSTI bzw. maximalen CSTI ist. Die durchschnittliche Zeit zur Bestimmung eines MCST ist allerdings höher als zur Bestimmung eines
MCSTI. Die Gesamtzeit zur Enumeration auf 10 zufälligen Baumpaaren mit 50 Kanten
betrug 0,2 s für alle MCST. Auf den selben Bäumen dauerte es 14 Sekunden alle MCSTI zu
enumerieren. Diese Ergebnisse lassen sich den Tabellen 4.2 und 4.8 entnehmen. Das Ziel,
einen Algorithmus anzugeben, der zur Enumeration aller MCST weniger Zeit benötigt als
ein Algorithmus, der die MCST aus den MCSTI konstruiert, wurde klar erreicht. Solch ein
4.2. COMMON SUBTREES
81
Algorithmus benötigte die Zeit zur Enumeration der MCSTI und zusätzlich noch die Zeit,
daraus die MCST, inklusive Isomorphieprüfung, zu berechnen.
Wegen der geringen Anzahl von MCST für kleine Bäume erscheint die Wahl für die
Baumkanonisierung nach Valiente [28], deren Bestimmung nach Satz 3.14 für n Knoten
O(n2 ) Zeit benötigt, nicht mehr so gut. Dass die Anzahl so gering ausfällt, war zu Beginn
der Arbeit nicht abzusehen. Bei kleinen Bäumen ist vermutlich ein Linearzeitalgorithmus
zur Isomorphieprüfung von Bäumen die bessere Wahl, auch dann, wenn sich aus dem
Algorithmus keine Zwischenergebnisse, wie eine eindeutige Kanonisierung, wiederverwerten
lassen.
Dass die nötige Zeit zur Berechnung aller maximalen CST so hoch ist, ist vor allem der
Subtree Isomorphie Prüfung über den Algorithmus von Edmonds geschuldet. Abbildung
4.4 zeigt einen zu Abbildung 4.1 umgekehrten Verlauf der grünen Kurve. Die benötigte Zeit
(blaue Kurve) sinkt schneller als die Anzahl der Common Subtrees (rote Kurve). Daraus
ergibt sich der steigende Verlauf der grüne Kurve (CST pro Sekunde). Der Kurvenverlauf
lässt sich mit der Anzahl der nötigen STI-Prüfungen begründen (dunkelrote Kurve). So
höher die Mindestgröße ist, desto weniger solcher Prüfungen erfolgen, entsprechend geringer
ist die Berechnungszeit.
Das Verhältnis von MCST zu maximalen CST bei den untersuchten Zufallsbäumen
mit 20 Kanten liegt nach Tabellen 4.8 und 4.9 bei ungefähr 1 zu 3. Somit ist jeder dritte
maximale CST ein MCST. Im Gegensatz dazu ist das Verhältnis MCSTI zu maximalen
CSTI viel größer. Bei den untersuchten Bäumen mit 40 Kanten beträgt es ungefähr 1 zu
1000, wie Tabellen 4.1 und 4.2 zu entnehmen ist.
Der Speicherverbrauch zur Berechnung der MCST ist bei großen Zufallsbäumen etwa
zur Hälfte durch die Speicherung der MCST bedingt. Die andere Hälfte wird im Wesentlichen für die Enumeration von Matchings und den Algorithmus von Edmonds benötigt. Bei
10 Baumpaaren mit jeweils 750 Kanten betrug der initiale Speicherverbrauch etwa 1 GB
und wuchs auf 1,5 bis 2 GB an, bevor dann die Berechnungen für das nächste Baumpaar
begannen. Obwohl Algorithmus 3.6 zur Enumeration von MCST kein polynomial-totalspace-Algorithmus ist, lässt er sich auch für Zufallsbäume mit vielen hundert und auch
über tausend Knoten nutzen.
In Tabelle 4.10 ist die Wirkung der Beschleunigungstechniken aus Abschnitt 3.6.8 gut
zu erkennen. Wenn ein Baum in einem anderen enthalten ist, ist die Laufzeit fast ausschließlich vom Algorithmus von Edmonds bestimmt. Das trifft insbesondere auch für die
Sterngraphen aus Abbildung 3.1 zu. In der Tabelle ist weiterhin zu erkennen, dass die
Laufzeit des Algorithmus von Edmonds nicht nur von der Kantenzahl, sondern auch der
Struktur der Bäume abhängt. Die Sterngraphen führen zu bipartiten Graphen mit vielen
Knoten, so dass die Berechnung der zulässigen Teilgraphen entsprechend länger dauert.
In der Tabelle ist der Zeitunterschied mit 1,8 s bzw. 12,6 s bei Bäumen mit 25 und 100
82
KAPITEL 4. EXPERIMENTELLE RESULTATE
Kanten
Zeit
Teilbaumpaare
Teilbaumpaare pro s
Edmonds
20
0,12 s
816
6857
0,02 s
25
0,46 s
2910
6312
0,04 s
30
0,86 s
3774
4383
0,05 s
35
3,43 s
12794
3726
0,08 s
40
18,10 s
48568
2688
0,11 s
45
105,00 s
241826
2293
0,13 s
50
Abbruch wegen Speichermangel (Verbrauch >8GB)
Tabelle 4.11: Teilbaumpaare mit ausschließlich größtmöglichen Isomorphismen - 10 Durchläufe
Kanten mehr als Faktor 10. Solch ein wort case wurde in Zusammenhang mit der Laufzeitabschätzung in Satz 2.16 beschrieben.
4.3
Teilbaumpaare, auf denen ein Isomorphismus existiert
In diesem Abschnitt werden die verschiedenen Varianten zur Enumeration von Teilbaumbaaren nach Abschnitt 3.6.7 untersucht. Wie zuvor werden die in Abschnitt 4.3.1 vorgestellten Ergebnisse in Abschnitt 4.3.2 bewertet.
4.3.1
Ergebnisse der Programms
Ausschließlich größtmögliche Isomorphismen
In Tabelle 4.11 ist die Anzahl der Teilbaumpaare angegeben, auf denen ausschließlich
größtmögliche maximale Isomorphismen bezüglich der gegebenen Bäume existieren. Nach
Abschnitt 3.6.7 ist der Algorithmus zur Berechnung kein polynomial-space-Algorithmus.
Die experimentellen Ergebnisse in der Tabelle sind dazu konform.
Ausschließlich maximale Isomorphismen
Mit steigender Kantenzahl nimmt die Anzahl der Lösungen und besonders die benötigte
Enumerationszeit zu, wie in Tabelle 4.12 zu sehen ist. Dies liegt an der hohen Zahl an
nötigen Tests auf echte Teilmengen, um die Maximalität der Isomorphismen sicherzustellen.
Bei höherer Kantenanzahl ist, wie zuvor, mit Speicherplatzproblemen zu rechnen.
Ausschließlich maximale Isomorphismen mit Mindestgröße
Abbildung 4.5 zeigt für zwei zufällige Bäume mit 23 Kanten, und 21 als Größe eines
MCSTI, die Anzahl der Teilbaumpaare mit Mindestgröße 1 bis 21, auf denen ausschließlich
maximale Isomorphismen bezüglich der gegebenen Bäume existieren. Alle Teilbäume aus
den enumerierten Teilbaumpaaren haben Mindestgröße 8.
4.3. TEILBAUMPAARE, AUF DENEN EIN ISOMORPHISMUS EXISTIERT
Kanten
Zeit
Teilbaumpaare
Teilbaumpaare pro s
Teilmengen-Tests
15
0,7 s
5853
7898
8M
18
3,6 s
18124
5009
64 M
20
13,0 s
35032
2694
278 M
22
45,9 s
65143
1419
1137 M
25
969,2 s
261691
269
23309 M
83
Tabelle 4.12: Teilbaumpaare mit ausschließlich maximalen Isomorphismen - Jeweils 10 Durchläufe
5000
4000
3000
2000
1000
0
1
6
11
16
21
Mindestgröße der Teilbaumpaare
Zeit (ms)
Teilbaumpaare
Teilbaumpaare / s
Abbildung 4.5: Teilbäume mit ausschließlich maximalen Isomorphismen - 23 Kanten pro Baum
Größtmögliche Isomorphismen auf Bäumen verschiedener Größe
In Tabelle 4.13 erfolgt die Berechnung der Teilbaumpaare auf Bäumen unterschiedlicher
Größe. Zu beachten ist, dass die durchschnittliche Geschwindigkeit nahezu konstant ist.
4.3.2
Analyse und Bewertung
Es hat sich herausgestellt, dass die Anzahl der Lösungen sehr groß werden kann und bei
entsprechender Eingabegröße mehr Speicherplatz benötigt wird, als auf dem Testrechner
zur Verfügung stand. Da es mit der gegenwärtigen Implementierung nötig ist, alle bereits
berechneten Lösungen zu speichern, ist es nicht praktikabel, dieses Verfahren auf größeren
Bäumen anzuwenden. Das Verhältnis der Teilbaumpaare mit ausschließlich größtmöglichen
Isomorphismen zu Teilbaumpaaren mit ausschließlich maximalen Isomorphismen beträgt
für die Zufallsbäume mit 20 Knoten etwa 1 zu 45 und für Zufallsbäume mit 25 Knoten
84
KAPITEL 4. EXPERIMENTELLE RESULTATE
Kanten
Zeit
Teilbaumpaare
Teilbaumpaare pro s
Edmonds
10, 25
0,1 s
1T
11398
0,01 s
10, 50
2,2 s
20 T
8957
0,03 s
10, 75
8,3 s
70 T
8479
0,04 s
10, 100
21,2 s
197 T
9300
0,06 s
10, 125
43,3 s
403 T
9318
0,08 s
10, 150
62,4 s
580 T
9285
0,09 s
10, 175
96,3 s
883 T
9166
0,11 s
10, 200
128,4 s
1222 T
9517
0,12 s
Tabelle 4.13: Größtmögliche Isomorphismen, verschiedene Baumgrößen - Jeweils 10 Durchläufe
etwa 1 zu 90, und liegt damit zwischen dem Verhältnis von MCST zu maximalen CST
und MCSTI zu maximalen CSTI. Während es deutlich mehr maximale bzw. Maximum
CSTI als Teilbaumpaare mit den genannten Eigenschaften gibt, gibt es deutlich weniger
maximale CST bzw. Maximum CST.
Die hohe Zahl an nötigen Tests auf echte Teilmengen, falls keine Mindestgröße gefordert
ist, bedingen bereits bei kleinen Baumgrößen hohe Laufzeiten. So größer eine geforderte
Mindestgröße für die Teilbaumpaare ausfällt, desto weniger Tests auf echte Teilmengen
erfolgen. Das Maximum bei Mindestgröße 18 in Abbildung 4.5 für die berechneten Teilbaumpaare pro Sekunde lässt sich auf diesen Umstand zurückführen. Wegen der konstanten
Zeit des Algorithmus von Edmonds für alle Mindestgrößen und der geringen Zahl an Teilbaumpaaren über Größe 18 fällt die Zahl der berechneten Teilbaumpaare pro Sekunde ab
Mindestgröße 18.
Kapitel 5
Zusammenfassung und Ausblick
Basierend auf dem Algorithmus von Edmonds [21] wurde ein polynomial-delay-Algorithmus
zur Enumeration von Maximum Common Subtree Isomorphismen entwickelt. Mit Hilfe der
Erweiterung um Bezeichner können damit Feature Trees effizient verglichen werden. Für
den Vergleich werden nicht alle zu einem Feature Tree gespeicherten Daten verarbeitet. Für
eine zukünftige Erweiterung bietet sich an, auch die restlichen Daten zu berücksichtigen.
Des Weiteren wurde ein polynomial-total-time Algorithmus zur Enumeration aller maximalen Common Subtree Isomorphismen entwickelt. Die Auswertung in Kapitel 4.1 ergab,
dass dieser bereits bei einer Anzahl von 25 Kanten pro Baum über 400 mal so schnell wie
der Vergleichsalgorithmus [7] zur Enumeration von zusammenhängenden induzierten Teilgraphen bei Eingabe von zwei Bäumen ist. Das in der Einleitung genannte Ziel wurde
somit erreicht.
Das Teilproblem der Enumeration von Matchings auf einem bipartiten Graphen mit
Gewichten wurde auf zwei Arten gelöst. Eine Transformationen auf einen anderen bipartiten Graphen ohne Gewichte, auf dem dann perfekte Matchings enumeriert werden, hat sich
besonders bei Graphen mit höherem Knotengrad und in Zusammenhang mit Bezeichnern
als vorteilhaft erwiesen. Bei niedrigem Knotengrad und ohne Bezeichner hat das entwickelte Verfahren zur Enumeration aller maximalen Matchings in einem vollständigen bipartiten
Graphen die besseren Ergebnisse erzielt. Bei beiden Methoden führt eine Speicherung berechneter Maximum Weight Bipartite Matchings, die dann in Linearzeit abgerufen werden
können, zu einer niedrigeren Berechnungszeit für die Enumeration von Maximum Common
Subtree Isomorphismen.
Maximum Common Subtrees können mit einem entwickelten Verfahren, dass direkt
bei der dynamischen Programmierung im Algorithmus von Edmonds ansetzt, enumeriert
werden. Der dazu nötige Zeitaufwand ist deutlich geringer, als die MCST aus den MCSTI
zu berechnen, wie in Abschnitt 4.2.2 gezeigt wurde. Auch maximale Common Subtrees
können auf diese Weise berechnet werden. Dazu ist jedoch eine Subtree Isomorphie Prüfung
nötig. Diese erfolgt im Rahmen dieser Arbeit mit Hilfe des Algorithmus von Edmonds
85
86
KAPITEL 5. ZUSAMMENFASSUNG UND AUSBLICK
anstelle eines auf Subtree Isomorphie spezialisierten Algorithmus, beispielsweise aus [26].
Das wirkt sich negativ auf die Laufzeit zur Enumeration aller maximalen CST aus. Für eine
künftige Programmversion stellt eine effiziente Subtree Isomorphie Prüfung eine wesentliche
Verbesserung für dieses Problem dar.
Ein Algorithmus, der Paare von Teilbäumen aufzählt, auf denen mindestens ein Isomorphismus existiert und alle darauf existierenden Isomorphismen maximal oder sogar
größtmöglich sind, zeigt einen hohen Speicherverbrauch auf. Für Graphen mit mehr als
etwa 50 Kanten ist der Algorithmus somit nur eingeschränkt nutzbar. Ein Ansatz, die Lösungen aufzuzählen, ohne vorherige Lösungen speichern zu müssen, ähnlich dem Verfahren
zur Enumeration von c-zusammenhängenden Cliquen, das in Abschnitt 3.2.1 vorgestellt
wurde, könnte Abhilfe schaffen. Mit den Bezeichnungen aus diesem Abschnitt werden in
der Menge R zwei Teilmengen VR0 und VS0 der Knotenmengen der gegebenen Bäumen gespeichert, auf denen mindestens ein Isomorphismus existiert. Dies lässt sich nach Aho und
Hopcroft [1] in Linearzeit überprüfen. In der Menge P sind entsprechend die Knotenpaare,
bestehend aus je einem Knoten aus V (R) und V (S), enthalten, um die irgendein Isomorphismus ϕ : VR0 → VS0 erweitert werden kann. Wenn eine Erweiterung nicht möglich ist,
dann sind alle Isomorphismen von VR0 nach VS0 maximal bezüglich der Bäume der Eingabe. Die mehrfache Aufzählung gleicher Teilbaumpaare wird analog zur Enumeration von
Cliquen durch Mengen von verbotenen Knoten verhindert. Der nötige Speicherbedarf ist
mit diesem Verfahren linear von der Anzahl der Knotenpaare abhängig.
Für alle Verfahren ist es möglich, eine Mindestgröße der Lösungen anzugeben. Die
praktischen Resultate zeigen, dass auch mit dieser Bedingung eine effiziente Enumeration
möglich ist, auch wenn sich worst case-Beispiele konstruieren lassen, die beweisen, dass es
sich jeweils um keine polynomial-total-time-Enumeration handelt.
Der Speicherverbrauch zur Berechnung von maximalen und Maximum Common Subtrees lässt sich verringern. Falls zwei gewurzelte Teilbäume r1 und r2 isomorph sind, sind
für alle gewurzelten Teilbäume s von S die in den Binärbäumen B(r1 , s) und B(r2 , s) gespeicherten Kanonisierungen identisch. Es reicht daher, diese nur einmal zu speichern und
die Zeiger in den entsprechenden Datenstrukturen auf die selben Binärbäume zeigen zu
lassen. Für isomorphe gewurzelte Teilbäume von S gilt die Aussage analog.
Eine weitere interessante Option ist die Bestimmung der Anzahl der Maximum Common Subtree Isomorphismen, ohne diese zu enumerieren. Das gelingt, indem im Algorithmus von Edmonds diese Anzahl für alle Paare von gewurzelten Teilbäumen berechnet wird
und daraus dann die gesamte Anzahl. Hinweise zur Berechnung dieser Anzahl finden sich
in Abschnitt 3.3.1. So lässt sich vorab einschätzen, wie groß der Aufwand ist, alle Lösungen
zu enumerieren.
Eine Ausweitung der Enumeration auf andere Graphklassen, wie Serien-Parallele Graphen, scheint nicht ausgeschlossen. Graphklassen, auf denen die Berechnung eines Maximum Common Subgraph Isomorphismus über eine Transformation in eine Baumstruktur
87
erfolgen kann, lassen möglicherweise eine Enumeration aller Maximum Common Subgraphs mit dem in dieser Arbeit entwickelten Algorithmus zu. Dies zu überprüfen ist eine
spannende Aufgabe für zukünftige Untersuchungen.
Um die Benutzerfreundlichkeit des der Arbeit beiliegenden Programm zu erhöhen, bietet es sich an, eine grafische Schnittstelle mit erweiterten Möglichkeiten zur Ein- und Ausgabe zu entwickeln. Das schließt weitere Möglichkeiten zur Erstellung der Bäume oder der
Festlegung der Bezeichner ein. Die Bäume und Maximum Common Subtrees könnten mit
Hilfe der Algorithmen aus dem Open Graph Drawing Framework [23] dargestellt werden.
88
KAPITEL 5. ZUSAMMENFASSUNG UND AUSBLICK
Anhang A
Weitere Informationen
In Anhang A.1 wird die Struktur der dieser Arbeit beiliegende Implementierung grob
beschrieben. Darauf folgen in Anhang A.2 Hinweise zur Konfigurationsdatei. In Anhang
A.3 folgt eine kurze Bedienungsanleitung des Programms.
A.1
Implementierung
Das Programm wurde mit Visual Studio 2012 in der Programmiersprache C++ auf einem 64-bit Windows 7 System als Konsolenanwendung erstellt. Dazu wurde das Open
Graph Drawing Framework (OGDF) [23] eingebunden. Das Programm besteht aus folgenden Klassen-/Quelldateien.
• tree.cpp, tree.h
In der Klasse Tree wird ein Baum verwaltet. Es kann ein Zufallsbaum oder ein
Sterngraph erstellt werden, ein Datensatz aus der FTree-Datenbank eingelesen und
daraus der entsprechende Baum generiert werden, sowie die kanonische Darstellung
des Baumes berechnet werden. Diese Klasse enthält außerdem für jede Kante des
Baumes zwei Objekte vom Typ RootedSubTree
• RootedSubTree.cpp, RootedSubTree.h
Die Klasse RootedSubTree verwaltet die gewurzelten Teilbäume, vgl. Definition 2.15.
Diese Klasse bietet vorwiegend Zugriffsmöglichkeiten, beispielsweise auf die über Zeiger verlinkten Kindteilbäume oder die kanonische Darstellung des gewurzelten Teilbaums.
• RstPair.cpp, mcs.h
Mit Hilfe der Klasse RstPair werden Paare von gewurzelten Teilbäumen verwaltet.
In dieser Klasse wurden alle Berechnungen implementiert, die auf einem Paar von
gewurzelten Teilbäumen basieren. Das schließt die Erstellung des zulässigen Teilgraphen, die Bestimmung der D-Werte, die Rekursionen für die Bestimmung der CSTI
89
90
ANHANG A. WEITERE INFORMATIONEN
und CST auf dem Paar von gewurzelten Teilbäumen und die Enumeration von Matchings ein.
• mcs.cpp, mcs.h
In der Klasse Mcs sind die Hauptalgorithmen, wie die Enumeration aller Maximum
CSTI, implementiert. Das schließt die Erstellung der Objekte vom Typ RstPair und
den Algorithmus von Edmonds mit ein. In den Algorithmen werden die entsprechenden Funktionen auf den RstPair-Objekten aufgerufen. Diese Klasse wird mit zwei
Objekten vom Typ Tree initialisiert.
• Solution.cpp, mcs.h
Die Klasse Solution speichert den aktuell generierten Isomorphismus. Dort wird
gleichzeitig die aktuelle Größe bzw. das Gewicht, im Fall von CWSTI, gespeichert.
Außerdem wird festgehalten, wie groß der Isomorphismus höchstmöglich werden
kann. Diese Klasse wird auch als Hilfsklasse zur Bestimmung der Matchings genutzt,
da im Rahmen dieser Arbeit Matchingkanten und die Zuordnungen von Knoten in
einem Isomorphismus zueinander korrelieren.
• clique.cpp, mcs.h
In der Klasse Clique ist das in Abschnitt 3.2.1 vorgestellte Verfahren zur Enumeration von maximalen CCISGI implementiert.
• Hauptprogramm.cpp
Hier findet sich die Funktion main(). Dort wird unter anderem die Konfigurationsdatei eingelesen und die verschiedenen Algorithmen aufgerufen. Von hier findet auch,
mit Hilfe der Klasse mcs, ein Vergleich der in der FTree-Datenbank gespeicherten
Feature Trees statt.
A.2
Konfigurationsdatei
Alle Einstellungen, wie die Wahl der Algorithmen, können über die Konfigurationsdatei mcs.cfg vorgenommen werden. Eine Standardkonfigurationsdatei wird automatisch
erstellt, falls keine vorhanden sind. Leerzeilen und Zeilen, die mit // beginnen, werden
überlesen. Die einzelnen Einträge sind in der Datei mit Kommentaren beschrieben.
Die Einträge TREESIZE1, TREESIZE2 und MINSIZE sind optional. Bei Programmstart
wird die Größe der Bäume und die Mindestgröße der maximalen CSTI und CST abgefragt. Diese können alternativ über die Konfigurationsdatei festgelegt werden, so dass das
Programm ohne Benutzereingabe die Algorithmen ausführt.
Der Eintrag BATCHRUN legt fest, wie oft die vorgegebenen Algorithmen wiederholt werden sollen. Dabei werden jeweils andere Zufallsbäume erzeugt. Dies ermöglicht die Berechnung von durchschnittlichen bzw. summierten Werten über verschiedene Eingaben hinweg.
A.3. BEDIENUNGSANLEITUNG
91
Der Zufallszahlengenerator kann über RNGSTART und RNGSTART2 initialisiert werden.
Auf diese Weise sind die Ergebnisse reproduzierbar. Falls die Werte übereinstimmen, sind
die generierten Bäume identisch. Eine Ausnahme ist, wenn beide Werte auf 0 gesetzt sind.
Dann werden beide Bäume unabhängig zufällig erzeugt.
Mit den Optionen NODELABELS und EDGELABELS werden Knoten- bzw. Kantenbezeichner
hinzugefügt. Die Bewertungsfunktion und die Label sind in der gegebenen Programmversion nicht konfigurierbar.
Für Laufzeitvergleiche sollte die Option ONLY_TOTAL auf 1 gesetzt werden, denn Textausgaben während der Berechnung erhöhen die Gesamtzeit und verfälschen das Ergebnis.
Ungültige Eingaben werden beim Programmstart überprüft. Dabei erfolgt ein Hinweis,
wie diese Werte zu korrigieren sind. Eine Garantie, dass alle möglichen Falscheingaben
abgefangen werden, wird nicht gegeben.
A.3
Bedienungsanleitung
Bei Programmstart müssen bis zu drei Zahlen eingegeben werden, die Kantenanzahl der
beiden Bäume und gegebenenfalls die Mindestgröße der maximalen CSTI bzw. CST. Die
Eingabe entfällt, falls diese Zahlen über die Konfigurationsdatei voreingestellt wurden.
Eine positive Zahl für die Baumgröße bestimmt die Anzahl der Kanten des Baumes.
Eine negative Zahl n liest den |n|-ten Eintrag aus der beiliegenden FTree-Datenbank
1252427226359312397.fdf und generiert daraus einen Baum. Falls die erste eingegebene Zahl 0 und die zweite Zahl p positiv ist, werden die ersten p Bäume aus der FTreeDatenbank paarweise miteinander verglichen und nach Ähnlichkeit sortiert angezeigt.
Die Auswahl der Algorithmen erfolgt ausschließlich über die Konfigurationsdatei. Je
nach Einstellungen der Konfigurationsdatei werden Zwischenergebnisse angezeigt oder nur
eine Zusammenfassung ausgegeben. Dort werden unter anderem die Anzahl der berechneten Lösungen, verworfenen (bad) Matchings und so weiter angezeigt. Das Programm
beendet sich nach den Berechnungen automatisch. Es ist deshalb sinnvoll, es aus einem
Konsolenfenster heraus zu starten und/oder die Ausgabe in eine Datei umzulenken.
92
ANHANG A. WEITERE INFORMATIONEN
Abbildungsverzeichnis
2.1
Common Subtree und Common Subtree Isomorphismus . . . . . . . . . . .
6
2.2
Gewurzelter Baum . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8
2.3
Gewurzelter Teilbaum . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9
2.4
Algorithmus von Edmonds - Dynamische Programmierung . . . . . . . . . . 10
2.5
Algorithmus von Edmonds - Zusammenfügen der Teillösungen . . . . . . . . 12
2.6
Matchings im Algorithmus von Edmonds . . . . . . . . . . . . . . . . . . . . 13
2.7
Augmentierung eines Matchings . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.8
Erweiterung und Augmentierung in MaxWBPM . . . . . . . . . . . . . . . . 20
3.1
Anzahl Maximum CSTI nicht polynomiell beschränkt . . . . . . . . . . . . . 24
3.2
Teilprobleme im Algorithmus von Uno . . . . . . . . . . . . . . . . . . . . . 30
3.3
Identische Matchings im partiell modifizierten Algorithmus von Uno . . . . 32
3.4
Rekursionsabbruch im modifizierten Algorithmus von Uno . . . . . . . . . . 32
3.5
Enumeration auf zwei gewurzelten Teilbäumen . . . . . . . . . . . . . . . . 35
3.6
Festlegung der Ordnungsfunktion I in Algorithmus 3.1 . . . . . . . . . . . . 38
3.7
Wahl des gewurzelten Teilbaums r in Algorithmus 3.1 . . . . . . . . . . . . 41
3.8
Kantenlöschung bei maximalen Common Subtree Isomorphismen . . . . . . 44
3.9
Beispiel zur Aktualisierung von p in Abschnitt 3.4.2 . . . . . . . . . . . . . . 48
3.10 Common Weighted Subtree Isomorphismus . . . . . . . . . . . . . . . . . . 50
3.11 Nicht-maximaler MCWSTI . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
3.12 Baumkanonisierung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
3.13 Baumkanonisierung, verschiedene Wurzeln . . . . . . . . . . . . . . . . . . . 58
3.14 Baumkanonisierung, ineinander enthaltene Bäume
. . . . . . . . . . . . . . 61
3.15 Enumeration von Teilbäumen, auf denen ein Isomorphismus existiert . . . . 64
4.1
Auswertung - Maximale CSTI mit Mindestgröße . . . . . . . . . . . . . . . 72
4.2
Auswertung - Vergleich MaxWBM und MaxWBM’ . . . . . . . . . . . . . . 73
4.3
Auswertung - Feature Trees . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
4.4
Auswertung - Maximale CST mit Mindestgröße . . . . . . . . . . . . . . . . 80
93
94
ABBILDUNGSVERZEICHNIS
4.5
Auswertung - Teilbaumpaare mit ausschließlich maximalen Isomorphismen
mit Mindestgröße . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
Algorithmenverzeichnis
2.1
Berechnung von D(Rvu , Sxw ) für ein Paar von gewurzelten Bäumen . . . . . . 10
2.2
Berechnung der Größe eines Maximum Common Subtree Isomorphismus . . 12
3.1
Enumeration aller Maximum Common Subtree Isomorphismen . . . . . . . 33
3.2
Aufzählung des nächsten Maximum CSTI auf einem Paar von gewurzelten
Bäumen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
3.3
Enumeration aller maximalen Common Subtree Isomorphismen . . . . . . . 44
3.4
Enumeration aller maximalen CSTI mit einer Mindestgröße m . . . . . . . . 46
3.5
Berechnung von B(Rvu , Sxw ) für ein Paar von gewurzelten Bäumen . . . . . . 58
3.6
Enumeration aller Maximum Common Subtrees . . . . . . . . . . . . . . . . 59
3.7
Einfügen einer Kanonisierung in einen Binärbaum mit Subtree Isomorphie
Prüfung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
3.8
Enumeration aller maximalen CST mit einer Mindestgröße m . . . . . . . . 63
3.9
Nebenläufige Enumeration aller maximalen Common Subtree Isomorphismen 67
3.10 Nebenläufige Enumeration von maximalen CSTI - Hilfsalgorithmus . . . . . 67
95
96
ALGORITHMENVERZEICHNIS
Tabellenverzeichnis
4.1
Auswertung - Maximale CSTI . . . . . . . . . . . . . . . . . . . . . . . . . . 70
4.2
Auswertung - Maximum CSTI . . . . . . . . . . . . . . . . . . . . . . . . . . 71
4.3
Auswertung - Vergleich CSTI und CCISGI . . . . . . . . . . . . . . . . . . . 71
4.4
Auswertung - Wahl der Kantenreihenfolge . . . . . . . . . . . . . . . . . . . 72
4.5
Auswertung - Maximum CSTI mit Bäumen verschiedener Größe . . . . . . . 74
4.6
Auswertung - MSTI Ordnungsfunktion gegen Kantenlöschung . . . . . . . . 75
4.7
Auswertung - Nebenläufigkeit . . . . . . . . . . . . . . . . . . . . . . . . . . 75
4.8
Auswertung - Maximum CST . . . . . . . . . . . . . . . . . . . . . . . . . . 79
4.9
Auswertung - Maximale CST . . . . . . . . . . . . . . . . . . . . . . . . . . 79
4.10 Auswertung - Maximum CST mit Bäumen verschiedener Größe . . . . . . . 80
4.11 Auswertung - Teilbaumpaare mit ausschließlich größtmöglichen Isomorphismen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
4.12 Auswertung - Teilbaumpaare mit ausschließlich maximalen Isomorphismen . 83
4.13 Auswertung - Teilbaumpaare mit ausschließlich größtmöglichen Isomorphismen, verschiedene Baumgrößen . . . . . . . . . . . . . . . . . . . . . . . . . 84
97
98
TABELLENVERZEICHNIS
Index
B(Rvu , Sxw ), siehe Binärbaum
D(Rvu , Sxw ),
Rvu , 8
Sxw , 8
CSTI, siehe Common Subtree Isomorphismus
9
maximal, 6
CWSTI, siehe Common Weighted Subtree
Isomorphismus
c-Kante, 27
Enumeration, 24
Algorithmus von Edmonds, 7
Enumerationsalgorithmus, 24
Algorithmus von Uno, 29
Exzentrizität, 58
Baum, 5
G(y), siehe Zulässiger Teilgraph
gewurzelt, 8
Graph, 3
Kanonisierung, 55
azyklisch, 4
Teil-, 5
bipartit, 14
gewurzelt, 8
gelabelt, 7
Zentrum eines, 58
gerichtet, 4
Binärbaum, 56
zusammenhängend, 5
CCISG, siehe Connected Common Induced Isomorphismus, 5
Subgraph
auf gelabelten Graphen, 7
Clique, 26
Kante, siehe Graph
c-zusammenhängend, 27
CLSTI, siehe Common Labeled Subtree Iso-
Knoten, siehe Graph
M -exponiert, siehe Matching
morphismus
Common Labeled Subtree Isomorphismus, 50
Common Subgraph, 25
M -gematched, siehe Matching
Kreis, 4
Alternierender, 29
Common Subgraph Isomorphismus, 25
Common Subtree, 6
Matching, 14
Common Subtree Isomorphismus, 6
Maximum Weight Bipartite, 14
Common Weighted Subtree Isomorphismus,
Maximum Weight Bipartite Perfect, 17
50
Perfekt, 17
Connected Common Induced Subgraph, 25
MaxWBM, 14
CST, siehe Common Subtree
MaxWBM’, 15
maximal, 6
MaxWBPM, 17
99
100
INDEX
MCLSTI, siehe Common Labeled Subtree
Isomorphismus
MCST, siehe Common Subtree
MCSTI, siehe Common Subtree Isomorphismus
MCWSTI, siehe Common Weighted Subtree
Isomorphismus
Ordnungsfunktion, 38
Pfad, 4
M -augmentierend, 19
Polynomial delay, 24
Polynomial space, 25
Polynomial total time, 24
STI, siehe Subtree Isomorphismus
Subtree Isomorphismus, 61
Teilgraph, 4
Teilgraph, induziert, 4
Vertex Product Graph, 26
VPG, siehe Vertex Product Graph
Wald, 5
Zulässiger Teilgraph, 19
Zusammenhangskomponente, 5
Literaturverzeichnis
[1] Aho, Alfred V. und John E. Hopcroft: The Design and Analysis of Computer
Algorithms. Addison-Wesley Longman Publishing Co., Inc., Boston, MA, USA, 1st
Auflage, 1974.
[2] Aoki, Kiyoko F., Atsuko Yamaguchi, Yasushi Okuno, Tatsuya Akutsu,
Nobuhisa Ueda, Minoru Kanehisa und Hiroshi Mamitsuka: Efficient TreeMatching Methods for Accurate Carbohydrate Database Queries. Genome Informatics,
14:134–143, 2003.
[3] Arora, Sanjeev und Boaz Barak: Computational Complexity: A Modern Approach. Cambridge University Press, New York, NY, USA, 1st Auflage, 2009.
[4] Bahiense, Laura, Gordana Manić, Breno Piva und Cid C. de Souza: The
maximum common edge subgraph problem: A polyhedral investigation. Discrete Applied Mathematics, 160(18):2523 – 2541, 2012. V Latin American Algorithms, Graphs,
and Optimization Symposium — Gramado, Brazil, 2009.
[5] Bang-Jensen, Jørgen und Gregory Z. Gutin: Digraphs: Theory, Algorithms and
Applications. Springer Publishing Company, Incorporated, 2nd Auflage, 2008.
[6] Bunke, H.: On a Relation Between Graph Edit Distance and Maximum Common
Subgraph. Pattern Recogn. Lett., 18(9):689–694, August 1997.
[7] Cazals, F. und C. Karande: An Algorithm for Reporting Maximal C-cliques. Theor.
Comput. Sci., 349(3):484–490, Dezember 2005.
[8] Cook, William J., William H. Cunningham, William R. Pulleyblank und
Alexander Schrijver: Combinatorial Optimization. John Wiley & Sons, Inc., New
York, NY, USA, 1998.
[9] Cormen, Thomas H., Charles E. Leiserson, Ronald L. Rivest und Clifford
Stein: Introduction to Algorithms, Third Edition. The MIT Press, 3rd Auflage, 2009.
[10] Creignou, Nadia, Arne Meier, Julian-Steffen Müller, Johannes Schmidt
und Heribert Vollmer: Paradigms for Parameterized Enumeration. In: Chat101
102
LITERATURVERZEICHNIS
terjee, Krishnendu und Jirí Sgall (Herausgeber): Mathematical Foundations of
Computer Science 2013, Band 8087 der Reihe Lecture Notes in Computer Science,
Seiten 290–301. Springer Berlin Heidelberg, 2013.
[11] Cuissart, Bertrand und Jean-Jacques Hébrard: A Direct Algorithm to Find
a Largest Common Connected Induced Subgraph of Two Graphs. In: Brun, Luc
und Mario Vento (Herausgeber): GbRPR, Band 3434 der Reihe Lecture Notes in
Computer Science, Seiten 162–171. Springer, 2005.
[12] Diestel, Reinhard: Graph Theory. Springer Verlag, 2010.
[13] Fukuda, Komei und Tomomi Matsui: Finding All Minimum Cost Perfect Matchings in Bipartite Graphs, 1991.
[14] Garey, Michael R. und David S. Johnson: Computers and Intractability; A Guide
to the Theory of NP-Completeness. W. H. Freeman & Co., New York, NY, USA, 1990.
[15] Johnson, David S., Mihalis Yannakakis und Christos H. Papadimitriou: On
generating all maximal independent sets. Information Processing Letters, 27(3):119 –
123, 1988.
[16] Jovanović, A. und D. Danilović: A new algorithm for solving the tree isomorphism
problem. Computing, 32(3):187–198, 1984.
[17] Koch, Ina: Enumerating all connected maximal common subgraphs in two graphs.
Theoretical Computer Science, 250(1–2):1 – 30, 2001.
[18] Kuhn, Harold W.: The Hungarian Method for the assignment problem. Naval Research Logistics Quarterly, 2:83–97, 1955.
[19] Levi, G.: A note on the derivation of maximal common subgraphs of two directed or
undirected graphs. CALCOLO, 9(4):341–352, 1973.
[20] Matula, David W.: An algorithm for subtree identification. SIAM Rev., 10:273–274,
1968.
5
[21] Matula, David W.: Subtree Isomorphism in O(n 2 ). In: B. Alspach, P. Hell und
D.J. Miller (Herausgeber): Algorithmic Aspects of Combinatorics, Band 2 der Reihe
Annals of Discrete Mathematics, Seiten 91 – 106. Elsevier, 1978.
[22] Mutzel, Petra: Vorlesung Graphenalgorithmen, Kapitel 1.4, TU Dortmund, WiSe
2011/2012.
[23] Open Graph Drawing Framework (OGDF). http://www.ogdf.net/, 2013.
LITERATURVERZEICHNIS
103
[24] Rarey, Matthias und J.Scott Dixon: Feature trees: A new molecular similarity measure based on tree matching. Journal of Computer-Aided Molecular Design,
12(5):471–490, 1998.
[25] Raymond, John W. und Peter Willett: Maximum common subgraph isomorphism algorithms for the matching of chemical structures. Journal of Computer-Aided
Molecular Design, 16:2002, 2002.
[26] Shamir, R. und D. Tsur: Faster Subtree Isomorphism. In: Proceedings of the Fifth
Israel Symposium on the Theory of Computing Systems (ISTCS ’97), ISTCS ’97,
Seiten 126–, Washington, DC, USA, 1997. IEEE Computer Society.
[27] Uno, Takeaki: Algorithms for Enumerating All Perfect, Maximum and Maximal
Matchings in Bipartite Graphs. In: Leong, Hon Wai, Hiroshi Imai und Sanjay
Jain (Herausgeber): ISAAC, Band 1350 der Reihe Lecture Notes in Computer Science,
Seiten 92–101. Springer, 1997.
[28] Valiente, Gabriel: Algorithms on Trees and Graphs. Springer-Verlag, Berlin, 2002.
104
LITERATURVERZEICHNIS
ERKLÄRUNG
105
Hiermit versichere ich, dass ich die vorliegende Arbeit selbstständig verfasst habe und
keine anderen als die angegebenen Quellen und Hilfsmittel verwendet sowie Zitate kenntlich gemacht habe.
Dortmund, den 24. Februar 2014
Andre Droschinsky
106