DBU-Abschlussbericht-AZ-19823
Werbung

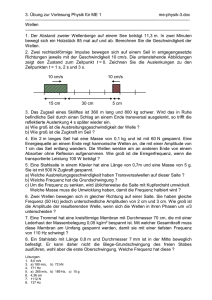
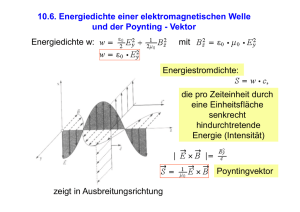
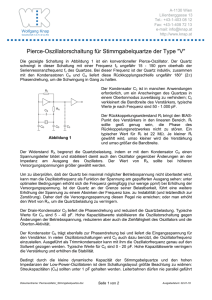
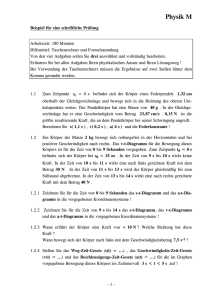
TU Dresden Elektrotechnisches Institut Professur Leistungselektronik Protronic Innovative Steuerungselektronik GmbH Drehzahlvariabler Vakuum­ Pumpenantrieb gefördert durch die Deutsche Bundesstiftung Umwelt Abschlußbericht AZ 19823 Verfasser: Dr.-lng. Klaus Lehnert; TU Dresden, ETI, Leistungselektronik DipI.-lng. Holger Müller; TU Dresden, ETI, Leistungselektronik DipI.-Ing. Dietmar Czekay; TU Dresden, ETI, Leistungselektronik DipI.-Ing. Thomas Wegner; Protronic Innovative Steuerungselektronik GmbH DipI.-Ing. Thilo Herrmann; Protronic Innovative Steuerungselektronik GmbH Bennewitz, den 28.10.2003 11/95 Projektkennblatt UMWELT der STI~ Deutschen Bundesstiftung Umwelt 19823 Az I Referat 21/0 I Fördersumme Antragstitel Drehzahlvariabler Vakuumpumpenantrieb Stichworte Produkt; Energie; Lärm r~ J:, 25.000,00 € Laufzeit Projektbeginn Projektende Projektphase(n) 12 Monate 20.08.2002 19.08.2003 keine Zwischenberichte: alle 6 Monate Kurzbericht Bewilligungsempfänger PROTRONIC Innovative Steuerungselektronik GmbH Eschenring 1 04828 Bennewitz Tel 03425/813591 Fax 03425/813592 Projektleitung Herr Wegner Bearbeiter Herr Wegner, Herr Dr. Lehnert Kooperationspartner TU Dresden, Fakultät für Elektrotechnik und Informationstechnik, Professur Leistungselektronik Zielsetzung und Anlass des Vorhabens Die • • • • • • technischen und umweltrelevanten Ziele lassen sich wie folgt zusammenfassen: Energieeinparungen bis zu 50% durch Arbeitspunktanpassung, Beseitigung bzw. Minimierung der Schwebungsgeräusche, Einsatz preiswerter Standard-Asynchronmaschinen (ASM) ohne Anlauf- und Betriebskondensatoren und damit Wegfall der aufwendigen "Blechabstimmung", Sicherung des spontanen Leistungsangebotes, starke Reduzierung von Pumpen- und Motorentemperatur und damit Erhöhung der Lebensdauer und Verbesserung des Endtotaldrucks der Pumpen durch eine niedrigere Öltemperatur. Darstellung der Arbeitsschritte und der angewandten Methoden 1. 2. 3. 4. 5. 6. 7. 8. 9. Voruntersuchungen zu Einsparungspotenzialen bei Wechselstrommotoren mit variabler sinusförmiger Spannung (Stelltransformator) Voruntersuchungen zu Einsparungspotenzialen bei Drehstromasynchronmaschinen mit variabler sinusförmiger Spannung (Stelltransformator) elektrische Messungen bei Vakuum akustische Messungen bei Vakuum Frequenzumrichter mit Drehstrom-Asynchronmaschine Konzeption des Leistungsteils des Frequenzumrichters Signalverarbeitung Funktionsaufbau und Messungen Vergleich mit den Voruntersuchungen Deutsche Bundesstiftung Umwelt 0 An der Bornau 2 0 490900snabrück 0 Tel 0541/9633-0 0 Fax 0541/9633-190 Ergebnisse und Diskussion Ein Drehstrom-Asynchronmotor hat gegenüber einem Wechselstrommotor wesentliche Vorteile beim Einsatz als Antrieb für Vakuumpumpen. Neben den erreichten Ergebnissen der Voruntersuchung mittels vor allem auch darum, eine 230/400V-Drehstrom­ 3-Phasen-Stelltransformator ging es Asynchronmaschine am 1-Phasen Netz zu betreiben und die dafür notwendigen Mehrkosten zu minimieren. Dies ist nur durch die Anwendung eines SPM-Frequenzumrichters möglich. Durch die Verringerung der Amplitude und der Frequenz der am Motor anliegenden Spannung war es möglich, eine wesentliche Reduzierung der Wirkleistung im Quasi-Leerlauf (bei aufgebautem Vakuum) zu erreichen. In dem für diese Pumpen-Motor-Kombination ermitteIlten optimalen Punkt bei f=30Hz, konnte eine Reduzierung der Wirkleistung um 45% gegenüber den Messungen bei f N =50Hz realisiert werden. Dies entspricht zwar nicht ganz dem Ziel von 50%, betrachtet man jedoch die gemessene Wirkleistung des Wechselstrom motors bei der Nennspannung UN =230V als Grundlage, so sinkt der Wirkleistungsanteil sogar um 67%. Obwohl die gemessenen Schalldruckpegel bei Nennspannung und Nennfrequenz beim Einsatz der Drehstrom-Asynchronmaschine mit Frequenzumrichter durchschnittlich 3,3dB höher lagen als beim Einsatz des Wechselstrommotors, waren im sie optimalen Punkt bei f=30Hz durchschnittlich 2,2dB niedriger als die Minimalwerte und sogar durchschnittlich 4,5dB niedriger als die Messwerte im angegebenen optimalen Bereich von U= 160V... 180V beim Einsatz des Wechselstrommotors. Wesentlich ungünstiger waren die Oberschwingungen im Motorstrom bei der Übermodulation im Frequenzbereich von ca. 42,5Hz bis 50Hz. Dieses Problem lässt sich jedoch durch die zusätzliche Verwendung einer PFC-Schaltung (power-factor-correction-Schaltung) wirkungsvoll reduzieren. Probleme bereitet der Schweranlauf der Pumpe bei geringen Temperaturen und der damit verbundene starke Anstieg des Stromes. Durch das Anlaufsverfahren mit niedriger Frequenz und niedriger Spannung kann der Anlassstrom wesentlich verringert werden. Für den extremen Fall, dass über längeren Zeitraum ein großer Drehmomentbedarf besteht, kann es sein, dass die Ströme an die vorgegebenen Grenzen des SPM stoßen. Durch eine entsprechende Dimensionierung des SPM, d.h. durch Überdimensionierung bezüglich des Nennarbeitspunktes könnte dieses Problem umgangen werden. Dabei ist festzustellen, dass die Preisunterschiede zwischen dem verwendeten SPM und dem nächst größeren Modell relativ gering sind. Auf Grund der störenden Nebengeräusche unterhalb der Frequenz von 30Hz wird der optimale Arbeitspunkt bei f=30Hz für die untersuchte Anwendung vorgeschlagen. Öffentlichkeitsarbeit und Präsentation Die Ergebnisse münden in die Produktion eines durch Frequenzumrichter gesteuerten Vakuumpumpenantriebes. Fazit Die Versuche haben gezeigt, dass vor allem eine sehr deutliche Verminderung der Geräuschemission durch den Einsatz eines Frequenzumrichters mit der untersuchten Motor-Vakuumpumpen-Kombination möglich ist. Weiterhin ist es gelungen, den Energiebedarf im Leerlauf zu reduzieren. Deutsche Bundesstiftung Umwelt 0 An der Bornau 2 0 490900snabrück 0 Tel 0541/9633-0 0 Fax 0541/9633-190 Inhaltsverzeichnis 1 Einleitung und Zielsetzung 3 2 Möglichkeiten zur Verbesserung derzeitiger Vakuumpumpenantriebe hinsichtlich Energieeinsparung und Geräuschreduzierung 4 2.1 Voruntersuchungen zu Einsparungspotenzialen bei Wechselstrornmotoren mit variabler sinusförmiger Spannung (Stelltransformator) 4 2.1.1 Messungen 4 2.1.2 Ergebnisse der elektrischen Messung bei Vakuum 5 2.1.3 Ergebnisse der akustischen Messung bei Vakuum 7 2.1.4 Zusammenfassung 7 2.2 Voruntersuchungen zu Einsparungspotenzialen bei Drehstromasynchronmaschinen mit variabler sinusförmiger Spannung (Stelltransformator) 7 2.2.1 Messungen 8 2.2.2 Ergebnisse der elektrischen Messungen bei Vakuum 8 2.2.3 Ergebnisse der akustischen Messungen bei Vakuum 9 10 2.2.4 Zusammenfassung 2.3 Frequenzumrichter mit Drehstrom-Asynchronmaschine 10 2.3.1 Leistungsteil 11 2.3.2 Signalverarbeitung 12 2.3.3 Messungen 17 2.3.3.1 Anlaufkennline 18 2.3.3.2 Ergebnisse der elektrischen Messung bei Vakuum 19 2.3.3.3 Ergebnisse der akustischen Messung bei Vakuum 20 21 2.3.4 Zusammenfassung 3 Bewertung der Ergebnisse 21 4 Ausblick 22 5. Anhang 24 6. Literatur .. , 26 2 1 Einleitung und Zielsetzung Bei den hier zur Diskussion stehenden Pumpenantrieben werden heute sowohl Wechsel­ als auch Drehstrommaschinen verwendet, die in den meisten Fällen ungeregelt betrieben werden d.h. direkt an das Netz angeschlossen sind und demzufolge mit konstanter Drehzahl arbeiten. Ist Druck oder Vakuum aufgebaut und wird nicht abgefordert, werden diese Pumpen im Quasi-Leerlauf betrieben, was mit einer starken Verringerung des Wirkungsgrades und somit einem Anstieg der Verluste einhergeht. Weiterhin entstehen bei diesem Betriebsfall unangenehme Nebengeräusche, die als "Schwebungen" bezeichnet werden und mit höherer Temperatur noch zunehmen. Da bei diesem Quasi-Leerlauf nur die elektrischen und mechanischen Verluste gedeckt werden müssen, würde eine Drehzahlabsenkung zu einer enormen Energieeinsparung führen. Dadurch wäre auch eine geringere Geräuschemission erreichbar. Bei Verwendung eines drehzahlvariablen Antriebes (Frequenzumrichter) könnte dann eine U/f­ Kennliniensteuerung der elektrische Maschine lastabhängig immer für den energetisch optimalen Arbeitspunkt sorgen. Werden an Stelle der Einphasenwechselstrommotoren Drehstrom-Asynchronmaschinen eingesetzt, so können bei vergleichbarer Leistung kleinere Motoren eingesetzt werden oder bei gleicher Baugröße Motoren, die ca. 30% mehr Leistung abgeben. Hinzu kommt ein größeres Anlaufmoment, so dass die Motoren von vom herein kleiner dimensioniert werden können, was sich letztendlich in einer Senkung der Kosten und einer Einsparung von Ressourcen niederschlägt. Weiterhin entfallen durch einen Austausch der Motoren Anlauf- oder Betriebskondensatoren. Ein derartiges Konzept kann jedoch nur mit der Entwicklung eines angepassten Frequenzumrichters einhergehen, wodurch -wie oben bereits erwähnt- über die U/f-Kennliniensteuerung (bzw. -regelung) immer der energetisch optimale Arbeitspunkt eingestellt werden kann. Die technischen und umweltrelevanten Ziele lassen sich wie folgt zusammenfassen: • Energieeinparungen bis zu 50% durch Arbeitspunktanpassung, • Beseitigung bzw. Minimierung der Schwebungsgeräusche, • Einsatz preiswerter Standard-Asynchronmaschinen (ASM) ohne Anlauf- und Betriebskondensatoren und damit Wegfall der aufwendigen "Blechabstimmung", • Sicherung des spontanen Leistungsangebotes, • starke Reduzierung von Pumpen- und Motorentemperatur und damit Erhöhung der Lebensdauer und • Verbesserung des Endtotaldrucks der Pumpen durch eine niedrigere Öltemperatur. Ziel der Untersuchung und Entwicklung ist es, einen an unterschiedliche Einphasenspannungsebenen anschließbaren Frequenzumrichter ftir Standard-ASM bis 600W zu entwickeln, der speziell auf die Belange eines Vakuumpumpenantriebes abgestimmt ist. Als exemplarisches Untersuchungsobjekt diente eine Vakuumpumpe D25B (25m 3/h) der Firma Leybold. 3 2 Möglichkeiten zur Verbesserung derzeitiger Vakuumpumpenantriebe hinsichtlich Energieeinsparung und Geräuschreduzierung 2.1 Voruntersuchungen zu Einsparungspotenzialen bei Wechselstrommotoren mit variabler sinusförmiger Spannung (Stelltransformator) Eine herkömmliche Möglichkeit des Antriebs von Val<Uumpumpen besteht in der Verwendung eines Einphasenwechselstrommotors. Mit der hier vorliegenden Voruntersuchung soll das maximale Einsparungspotenzial in Bezug auf die Leistungen sowie die Möglichkeiten der Verbesserung des Leistungsfaktors cos(tp) und der Verringerung der Geräuschemissionen festgestellt werden. Bei diesem Versuch kann über einen Stelltransformator die Spannung so eingestellt werden, dass diese dem aktuell notwendigen Leistungsbedarf der Vakuumpumpe angepasst ist. Dabei handelt es sich um eine reine Spannungsabsenkung. In der hier vorliegenden Voruntersuchung wurde der 230V Wechselstrommotor AMEB90SY4H2 der Firma AEG verwendet. Der Motor hat eine Nennleistung von 0,75kW bei einer Spammng U=230V und einem Nennstrom I=6,3A. Bei 1350min,1 besitzt dieser einen Leistungsfaktor von cos( tp)=0,90. Es sei betont, dass eine Realisierung der Drehzahlabsenkung über Stelltransformatoren nicht das Ziel dieser Untersuchung ist, da eine derartige Umsetzung nicht praxisrelevant ist. Es soll hier, wie schon erwähnt, lediglich das Potenzial der Einsparung untersucht werden. 2.1.1 Messungen Um die Vakuumpumpe mit Antriebsmotor nicht in einer speziellen Anwendung, sondern unter reproduzierbaren Bedingungen zu untersuchen, wurde sie frei im Raum aufgestellt und die Schallpegelmesssonden gemäß Abbildung 2-1 angeordnet. MP· Ein-/Auslassseite Im Öl filter Motor Pumpe D258 MP· Ein-/Auslassseite Im Im MP- Längsseite Abbildung 2-1 Geometrische Anordnung des Messaujbaus Am Luftaustritt der Pumpe war ein Ölfilter montiert, um die Abluft zu reimgen. Das Vakuum und damit der Quasi-Leerlauf konnte durch das Verschließen des Ansaugstutzens erreicht werden. Die akustischen Messpunkte (MP) liegen in einer Ebene mit der halben Maschinenhöhe. Die Messungen wurden bei thermischen Gleichgewicht der Anordnung 4 durchgeftihrt. Mittels eines Stelltransfonnators wurde die Eingangsspannung des Motors variiert. Der Schalldruckpegel wurde mit dem Schallpegelmessgerät Brüel & Kjaer, Typ 2231 und die elektrische Leistung mit dem Leistungsmessgerät PZ4000 der Finna Yokogawa durchgeftihrt . Das Schallpegelmessgerät ennöglicht die Bestimmung des Schalldruckpegels LAF Der Index A steht rur eine Bewertungskurve A gemäß DIN 45634. Dabei wird das Höhrempfinden des menschlichen Ohres nachempfunden. F verdeutlicht die Bewertung des zeitlichen Verlaufes des Pegels. Der Schalldruckpegel L AF wird in einem logarithmischen Verhältnis angegeben. Man bezieht den vorhandenen Schalldruck auf einen Bezugsschalldruck, nämlich die Hörschwelle des menschlichen Ohrs. Dabei ergibt sich der Schalldruckpegel aus L AF =20'lgp/po dB, wobei p der Effektivwert des Schalldruckes und po die Hörschwelle des menschlichen Ohres ist, die mit po=20pPa=20pN/m 2 festgelegt ist. Abbildung 2-2 Versuchsstand mit Vakuumpumpe D25B 2.1.2 Ergebnisse der elektrischen Messung bei Vakuum Diagramm 2-1 zeigt die Stromaufnahme des Motors und den entsprechenden Leistungsfaktor als Funktion der speisenden Spannung bei Qusi-Leerlauf des Motors (aufgebautes Vakuum). 5 •• =- 0,8 0,7 ~ 0,6 o iJ -- -r 0,4 C1l -I ....t- - -' H-l~j 1i! 0,3 I I-- t 0,1 .. - . I r li f--f f- - IL. I - 1--1- f-- l- I - ..,. J~ j,.. '" f-- L..J ... ro.... ~ 7 - 6 • 5 ~p es: s::: 4 E ~ 3VJ -c-l-- - --- t~If--1-- 0,2 ., .. c-- I-- rI--f-.- -1- , - -I-- 1--1- IL -I--I-- I------- o ~ 0,5 I ~.d.. '1il Cl I: :::l .~ . --fF\~--- H 8 I ~ I J - .c ur -- L r+ , 0,9 C- - , \--+- r:- 2 ~-- i-I- f --~. --t- r TII i I °100 110 120 130 140 150 160 170 180 190 200 210 220 230 240 250 o UIV COS(Phi) -+-I/A [ I Diagramm 2-1 Stromaufnahme und Leistungsfaktor als Funktion der Spannung Es ist zu erkennen, dass der optimale Arbeitspunkt des Motors im Bereich von 160V... 180V liegt. Dies hätte eine Verringerung der Strornaufuahme auf etwa 60% gegenüber der 230V -Einspeisung zur Folge. In Diagramm 2-2 sind die Wirk-, Blind- und Scheinleistung ebenfalls als Funktion der Spannung dargestellt. Die Wirkleistung reduziert sich von 800W auf SOOW bei der oben genannten Spannungsreduzierung. Der Leistungsfaktor liegt unter 140V bei 0,99, wodurch der Blindleistungsbedarf vernachlässigt werden kann. 2000 r-- +_=-r­ -4-; _~ r- 1800 : ­ ~ L ._ I I f =-~ I - ­ -- 1600 - '~ t I-J­ _. 1400' -­ 'TI -­ ~, r-t -1------... 1--,- -1 :' ~ ~ .. I­ 1000 800 1-­ l' · 600 400 200 - t· 11. . . ~ + 1- '-! t­ j - I - - c­ -- : I f- _ 120 I '-I-­ '+-+---c!-l-I-+-+-i--i--+-+-.IJ"I-+-+"-1 J~ / -+--+--+-+-+-1 -+--+-+--+--f---t--f-+-h,-q=J""-+--u/ . ~".If~ ~ 130 140 :1- f-- j 150 Iliao" I ""*"'-l-.,.... _L-~""" F­ -I--i-+-I--I-- 160 170 I/r;~r- , 1-+--+--1 +-t-r-I,~ ",../L.-t-+-+-+-+-+--t---i 1 ~~ J.- -It ;-f-- 1---. o ~r'----=-.--=_- - - ­ 110 t-· -=~I--= -=-­ .. -- ] r...... 100 _ _I . - !­ - 1--1--.. I 1--'- ­ -I-~I-- ~- - I-I~II --+--t- -I-­ -­ 1jii 1---I-i-+-+-1--t--l--+--+--I--I--lJL.-j -I-- r- -r--- 1200 I ­ 1-+--+-_+ -+-t--1i--t--+-+--1--t--+--I t 180 190 I ".-1-.....-+-11--1--1--+-+--1--1 --+--1 200 210 220 230 240 250 U/V Diagramm 2-2 Leistungen als Funktion der Spannung 6 2.1.3 Ergebnisse der akustischen Messung bei Vakuum Die Ergebnisse der akustischen Messung zeigt Diagramm 2-3. Der Schalldruckpegel verringert sich an der Ein-/Auslassseite um ca. 2dB und um ca. 1dB an der Längs- und Stirnseite bei der seIben Absenkung der Eingangsspannung wie bei den elektrischen Messungen. Der Nachweis von Schwebungsgeräuschen dieser Vakuumpumpe gelang nur bei wesentlich höherer Temperatur und einer Eingangsspannung von rund 260V. Allerdings treten diese Geräusche verstärkt bei Pumpen kleinerer Leistung auf. In diesem Zusammenhang sei vermerkt, dass die von Leybold zur Verfügung gestellte Pumpe geräuschmäßig eine der Besten ihrer Klasse ist. 62 61 d- ~ j 60 r-7- - 1 "- - --,. ,~ : I---i ,t Il:l 59 S _ ... 56 57 I· I I-~ I ~ 55 1- , I. .... ~ ~ l .. ..... 1 - ~ • -t -- , ::: t ~J I - ~I--l---l I-c- -I­ ~- I j' 1-_ -+--+-+--+- 1-1--1---+-+- +--+--1-11- + • I--+---+--+--+--~~I--l---l--i---+-+-! --+-+-+--t---I--l---l---+--+-t--+-+-i l--t--11-1 . - ' - -lo--~ :_ W~t-t_:J~~!oo..=+=t~~...*~$~4io""'";j;-1 -~ ~ ~ ". ......-.:tO'~~r:~~-=i;-1-~-+ ...... _-l---+_~ ~1­ .-c­ f". ~ _; ~ I -1--t.~'+-+--+--I--+--I---+--1--1--L-+-+.... -i ~l/"+---+-+-----+--1-+--1-+-1 -+---+--t-,-,~"-j ~ -' i'- -'­ j ~ : . _ _ ~ I ~; ~ --- X' ,.~,' .-; ,.: ......:. 11'<-I ~'". J~ ~ +-.... -- I 1 r ~ - Ii I I-~ ;;t''1L.o'~ II ~ 56 t ~j'~~!+T ~r-';+ ~ -t- 1- -I­ _f'-----l-f--'-1---4--~---l.--+--'-, _-~r-l------l.-i-+-------,-l i__'--..j.-+---'--~~=--+:=--L.:=-+:==-j=+.L1-_++--_+-L, -+. J.-_+-1-l---+-_ 100 110 120 130 140 150 160 170 160 190 200 210 220 230 -+-1--+------' 240 250 UIV [-l1lngsseHe -Ei"" Auslassseile - Stirnseite I Diagramm 2-3 Schalldruckpegel als Funktion der Spannung 2.1.4 Zusammenfassung Mit einer reinen Absenkung der speisenden Spannung bei Leerlauf, das heißt bei aufgebautem Vakuum, konnte an der zur Verfügung stehenden Vakuumpumpe mit 230V/SOHz AC-Motor die Verringerung des Energiebedarfs, die Erhöhung des Leistungsfaktors und geringere Geräuschemissionen überzeugend nachgewiesen werden. 2.2 Voruntersuchungen zu Einsparungspotenzialen bei Drehstromasynchronmaschinen mit variabler sinusförmiger Spannung (Stelltransformator) Wie bereits in der Einleitung elwähnt, bringt der Einsatz einer Drehstrom­ Asynchronmaschine (ASM) wesentliche Vorteile mit sich. Im Folgenden soll nun analog zum vorangegangenen Punkt untersucht werden, welches Einsparungspotenzial sich beim Einsatz einer derartigen ASM zum Antrieb einer Vakuumpumpe ergibt. 7 Bei diesem Versuch wurde über einen 3-Phasen-Stelltransformator die Spannung so eingestellt, dass diese dem aktuell notwendigen Leistungsbedarf der Vakuumpumpe angepasst ist. Dabei handelt es sich um eine reine Spannungsabsenkung. Als exemplarische Antriebsmaschine rur die Vakuumpumpe diente der Drehstrornmotor AM80NY4 der Firma AEG. Dieser hat eine Nennleistung von O,75kW bei einer Nennspannung von U=230V und einem Nennstrom von I=3,55A. Bei einer Drehzahl von 1400min'I besitzt der Motor einen Leistungsfaktor von cos(l/»)=O,75. Es sei hier betont, dass eine Realisierung der Drehzahlabsenkung über Stelltransformatoren wieder nicht das Ziel ist, da diese ebenfalls nicht praxisrelevant ist. Es soll hier lediglich das Potenzial der möglichen Einsparungen untersucht werden. 2.2.1 Messungen Um die Vakuumpumpe mit Antriebsmotor nicht in einer speziellen Anwendung, sondern unter reproduzierbaren Bedingungen zu untersuchen, wurde sie analog zum Punkt 2.1.1 frei im Raum aufgestellt und die Schallpegelmesssonden gemäß Abbildung 2-1 angeordnet. Am Luftaustritt der Pumpe war ebenfalls ein Ölfilter montiert, um die Abluft zu reinigen. Ein Vakuum und damit der Zustand des Quasi-Leerlaufes konnte durch das Verschließen des Ansaugstutzens erreicht werden. Die akustischen Messpunkte (MP) liegen in einer Ebene mit der halben Maschinenhähe. Die Messungen wurden an der warmgelaufenen Pumpe (thermisches Gleichgewicht) durchgeführt. Dies entspricht den Messbedingungen aus Punkt 2.1.1. 2.2.2 Ergebnisse der elektrischen Messungen bei Vakuum Diagramm 2-4 zeigt die Stromaufnahme und den Leistungsfaktor als Funktion der Spannung für den Fall, das bereits ein Vakuum aufgebaut ist. Es ist zu erkennen, dass der - ..-.-------.--..--,.-----,---,- 3,00 1,000 0,900 == .c --­ ~ -t---+- ­ 0 800 ­ 1 ~ ~ 0,700 o ._. 2,50 « ~ 0,600 c: o ~ 0,500 ~ Cl 0,400 c: :::J 1iS 0,300 C1l ...J 0 U) - - 1,50 +-----'---I----+--'---I----+-----'--+---'---1~~-+--'---+ 1,00 - 0,200 - 0,100 0, 000 -. 2,00 E .... I 60 - --+------+---­. j­ 70 1­ - 1_ -~ + 80 100 90 110 120 130 UIV I-COS(Phi) -+-I/A I Diagramm 2-4 Stromaufnahme und Leistungsfaktor als Funktion der Spannung optimale Arbeitspunkt im Bereich von U=90V liegt. Das entspricht einer verketteten 8 Spannung von 156V an der Maschine. Dabei verringert sich die Stromaufnahme von 2,5A auf ca. 1,9A. Diagramm 2-5 zeigt die Wirk-, Blind- und Scheinleistung als Funktion der Spannung. Es ist zu erkennen, das das Minimum der Wirkleistung ebenfalls bei U=90V liegt. Hierbei sinkt diese auf ca. 82% ihres Spitzenwertes. Die Scheinleistung sinkt dabei auf 51 % des Spitzenwertes bei U=130V und die Blindleistung auf41,2%. Der Leistungsfaktor steigt mit sinkender Spannung nahezu linear an und hat bei der Spannung U=90V einen Wert von ca. 0,7. 1000,0 '.' , 800,0 I 700,0 " VI • ...'u" I t 900,0 ~ I LJ1--~ I f, 500,0 400,0 - .­ - -- I ./ I - • .-I .....-"- ! t--=t~r/ 300,0 I' 200,0 60 - f-- I I - - IVV VV ) I 600,0 /i_ I - • V - ~ ... V / ./ ,. /'''' v:/ ....... ~ -I---- - I 70 80 90 100 110 120 130 U/V Diagramm 2-5 Leistungen als Funktion der Spannung 2.2.3 Ergebnisse der akustischen Messungen bei Vakuum Die Ergebnisse der akustischen Messung zeigt Diagramm 2-6. Es ist zu erkennen, dass die Schalldruckpegel sich an den verschiedenen Seiten unterschiedlich verhalten. Während der Pegel bei einer Spannungsabsenkung von 130V auf 90V an der Längsseite um 0,8dB steigt, sinkt der Schalldruckpegel an der Ein-, Auslassseite um 1,3dB. Der Pegel an der Stirnseite bleibt in diesem Bereich der Spannungsabsenkung nahezu konstant. Wie bei der Spannungsabsenkung am Wechselstrommotor gibt es bei einer Spannungsabsenkung von 90V auf 80V einen Anstieg des Schalldruckpegels um 4,6dB, der sich auch bei wiederholten Messungen bestätigt hat. 9 67,0 -­ , 65,0 63,0 III 'V .. j;: < 61,0 - I - -~~ +­ " -~-Pf1~~-t-._--+--~=::---,-,,_~--+I'''''''''''--+-------j-'-'-I 59,0 55,0 -­ -11 : - - ­ _ _'---~_'-'-_-i-_'-------l-_--'-_-+-_.L------+_--L_--< ~---J---- 60 70 80 100 90 120 110 130 U/V l-lllngSSeile - E i n - , Auslassseite --Stirnseite I Diagramm 2-6 Schalldruckpegel als Funktion der Spannung 2.2.4 Zusammenfassung Beim Einsatz der Drehstrom-ASM mit 3-Phasen-Transformator (reine Spannungsabsenkung) ist die Reduktion der Leistungen und des Schalldruckpegels bezogen auf die Werte bei U=230V nicht so überzeugend, wie beim Einsatz des Wechselstrommotors mit Stelltransformator. Bezieht man die Wirkleistungswerte jedoch auf die des Wechselstrommotors, so ist eine deutliche Verminderung festzustellen. Es zeigt sich auch hier erwartungsgemäß ebenfalls ein großes Einsparungspotential. Der Leistungsfaktor konnte bei Spannungsabsenkung deutlich erhöht und der Energiebedarf abgesenkt werden. 2.3 Frequenzumrichter mit Drehstrom-Asynchronmaschine Eine effektive Lösung für eine Anpassung der einzuspeisenden Spannung in Abhängigkeit von der Last kann nur mit leistungselektronischen Mitteln erfolgen. Prinzipiell bestehen dazu die Möglichkeiten des Einsatzes eines WechselspannungssteIlers für den Einsatz eines Einphasen-Wechselstrommotors sowie die Möglichkeit des Einsatzes eines Frequenzumrichters zur Ansteuerung einer Drehstrom-Asynchronrnaschine. Die wesentlich kostengünstigere Möglichkeit ist der Einsatz eines Wechselspannungsstellers. Allerdings ist dieser Einsatz problematisch, da durch den Wechselstrommotor mit Anlauf- oder Betriebskondensator eine kapazitive Last vorliegt, die nur schwer beherrschbar ist. Außerdem werden im Netzstrom Oberschwingungen erzeugt, die einen stark erhöhten Filtereinsatz erfordern und damit wiederum höhere Kosten verursachen. Die zwei fels frei eleganteste Lösung ist ein dreiphasiger Wechselrichter mit Eingangsgleichrichter und Spannungszwischenkreis zum Betrieb einer ASM. Allerdings ist diese Lösung kostenintensiver. Wie jedoch eingangs bereits beschrieben, bringt der Einsatz 10 von Standard-Asynchronmaschinen wesentliche Vorteile mit sich, so dass hier deren Anwendung untersucht werden soll. Als exemplarische Antriebsmaschine für die Vakuumpumpe wurde der Drehstrommotor AM80NY4 der Firma AEG mit einer Nennleistung von O,75kW bei einer Spannung von U=220V und einem Nennstrom von 3,55A verwendet. Bei einer Drehzahl von 1400min- 1 hat dieser Motor laut Typenschild einen Leistungsfaktor von cos(</J)=O,75. 2.3.1 Leistungsteil Neue 3-Phasen IGBT Module (Smart Power Moduls) eröffnen die Möglichkeit zur Entwicklung eines kompakten, kostengünstigen und zuverlässigen Frequenzurnrichters für den Motorantrieb niedriger Leistung. Im hier vorliegenden Fall wird ein Smart Power Modul (SPM) benötigt, das für eine Leistung von O,75kW ausgelegt ist, Spannungen von 600V schalten kann, eine ausreichend große Schaltfrequenz besitzt und letztendlich ­ zumindest im Minutenbereich - einen hohen Maximalstrom zuläßt. In der hier vorliegenden Untersuchung wurde exemplarisch das Test Board mit dem Smart Power Modul FSAMl5SH60 (siehe Abbildung 2-3) der Firma Fairchild verwendet, dessen typische Schaltfrequenz 15kHz beträgt. Abbildung 2-3 Ansicht des SPM FSAM15SH60 Das verwendete Modul FSAM15SH60 ist laut Datenblatt für eine Leistung bis O,8kW bei einer Spannung von IOOV bis 253V Wechselspannung ausgelegt. Der dauerhaft zulässige Laststrom beträgt S,OA (Ilms) und der maximal zulässige Laststrom ftir einer Minute ist mit 7,5A (Ilms) angegeben, was 211 % des Motomennstroms von 3,55A entspricht. Das ist wegen des Schwerlastanlaufes der Pumpe von großer Bedeutung. Sollte ein höherer Anlassstrom des Motors, zum Beispiel auf Gnmd der Anlaufproblematik nötig werden, so kann evtl. das nächst größere SPM FSAM20SH60 ausgewählt werden. Dieses ist für eine Leistung von 1,5kW ausgelegt und der dauerhaft zulässige Laststrom beträgt hier 8A. Für die Dauer einer Minute kann ein Strom von 12A fließen. Damit wäre der Frequenzumrichter, zumindest für den normalen Betrieb, stark überdimensioniert. Damit könnten allerdings die Probleme beim Anlauf besser beherrscht werden. Der Preis für dieses Modul unterscheidet sich nur unwesentlich vom Preis des verwendeten FSAMI5SH60. In Abbildung 2-4 ist das Prinzip der verwendeten Schaltung zu erkennen. Das Relais und der darüber liegende Widerstand bilden die Anfangsladeschaltung. Würde die Gesamtschaltung ohne diese Anfangsladeschaltung angeschaltet werden, so würde im ersten Augenblick ein sehr hoher Strom fließen. Um diesen zu begrenzen und damit eine 11 Zerstörung von Bauelementen zu verhindern, fließt der Strom zuerst durch den Widerstand. Dies geschieht dadurch, dass das Relais geöffnet ist und der Widerstand damit in Reihe zur nachfolgenden Schaltung liegt. Nachdem die Kapazitäten aufgeladen sind, wird das Relais geschlossen und damit der Widerstand kurzgeschlossen. Relais T1 AC 220V 'V C1 C2 C4 C6 C5 Cl ca C3 T2 Abbildung 2-4 Prinzipskizze des Frequenzumrichters Um elektromagnetische Störungen nach außen hin zu verhindern bzw. um entstehende Störungen abzuschotten, muss eine Filter-Schaltung vorgesehen werden. Dies übernehmen die Kondensatoren Cl bis C7 sowie die stromkompensierenden Drosseln. Die Schaltung zur Einhaltung der elektromagnetischen Verträglichkeit ist hier besonders wichtig, da gerade von Schaltungen, bei denen schnelle Änderungen von Strömen und Spannungen realisiert werden, große elektromagnetische Abstrahlungen hervorgerufen werden. Da derartige Änderungen durch das schnelle Ein- und Ausschalten der IGBTs zum Prinzip des Frequenzumrichters gehören, ist eine derartige EMV-Schaltung unerlässlich. Mit Hilfe der Diodenbrücke wird aus der Wechselspannung mittels Zweipulsgleichrichtung eine Gleichspannung erzeugt. Diese Gleichspannung wird dann dem Zwischenkreis, der hier durch den Kondensator CS realisiert wird, zugeführt. Die Zwischenkreisspannung wird mittels der IGBTs Tl bis T6, welche im Smart Power Modul integriert sind, in eine Dreiphasenwechselspannung umgeformt. Das SPM wird dabei durch den Mikrocontroller angesteuert. 2.3.2 Signalverarbeitung Um einen konstanten Luftspaltfluss im Grunddrehzahlbereich zu erhalten, wird U ---------­ •••••• ---­ ---_ "-"---/,-­ ma der Motor durch das U/f-Kennlinien­ Verfahren gesteuert. Die realisierte U/f­ Kennlinie ist in Diagramm 2-7 zu sehen. Da der Spannungsfall über den Motorwindungen im Bereich niedriger Frequenz nicht vernachlässigt werden kann, wird die Klemmenspannung zur Kompensierung dieses größeren Spannungsabfalls entsprechend erhöht. "/ / Im Feldschwächebereich wird die / / Spannung auf Nennspannung konstant gehalten. Dabei wird nur noch die '0 IN Frequenz erhöht. Diagramm 2-7 Realisierte U/fKennlinie Die Nennfrequenz beträgt im hier gezeigten Fall 50Hz bei einer Spannung von etwa 21SV, welche am Motor anliegt. u 12 OJ OJ cu-soll -soll - - 1/ \ t OJ ~ ~ V VAmp rp = Jeu. dt rp~ ~ ~ U,,_all.<;I=Ul\lllp· COS ? OJ UAmp (<!» Ub_",,,,=U,,,,,,,cos<ci>-Z/3 1t) UC_:lI\,I"I=-U"1Ilj)"cos(tj>+2/3 n:) ~ PW a PW b PW c -----. SPM Abbildung 2-5 Prinzipschaltbild der U/fSteuerung des Motors Abbildung 2-5 zeigt das Prinzipschaltbild "der U/f-Steuerung des Motors. Wird eine neue Frequenz w vorgegeben, so karul sich diese nicht sprunghaft ändern. Intern kann eine Beschleunigungsrate festgelegt werden. Diese kann zum Beispiel IHz/s bis 5Hz/s betragen. Entsprechend dieses Wertes werden die einzelnen Frequenzwerte berechnet, daraus gemäß Diagramm 2-1 der Amplitudenfaktor der Spannung bestimmt und der Phasenwinkel berechnet. Aus diesen Werten werden dann die 3-phasigen Ansteuersignale berechnet und an das SPM weitergeleitet. Mit dem Unterschwingungsverfahren ohne Übennodulation können dabei jedoch nur Ausgangsspannungen erzeugt werden, deren Effektivwerte unterhalb der Nennspannung des Motors liegen. Beträgt die Zwischenkreissparumng U z=300V, so beträgt die maximal mögliche Amplitude der sinusfönnigen Wechselspannung 300V/2=150V. Der Effektivwert dieser Wechselspannung beträgt dann 150V/J2 =106V und damit beträgt der Effektivwert der verketteten Spannung an der Maschine 183,7V. Dieser Wert ist jedoch niedriger als die Nennspannung. Um dieses Problem beheben zu können, könnte die Zwischenkreisspannung mittels Hochsetzsteller (boost converter) angehoben werden, um so auf die erforderliche Ausgangsspannung zu gelangen. Im hier dargestellten Versuch wird stattdessen das Prinzip der Übermodulation angewendet. Damit kann auch oberhalb einer Frequenz von f = 45Hz die Spannung weiter erhöht werden. Allerdings wird damit gleichzeitig die Fonn der Ausgangsspannung verändert, so dass diese mehr von der gewünschten Sinusfonn 13 abweicht. Damit verbunden sind nichtsinusförmige Motorströme, die zu zusätzlichen Wärmeverlusten im Motor fUhren. Zur Ansteuerung wurde exemplarisch der Mikrocontroller MC9S 12DP256B der Firma Motorola ausgewählt. Dabei handelt es sich um eine 16-Bit CPU mit 256kByte Flash EEPROM, 4kByte EEPROM und 12kByte RAM. Weiterhin besitzt der Controller unter Anderem zwei 8-Kanal ND-Wandler sowie 8 PWM-Kanäle. Der Controller kann direkt über Serienwiderstände an das Test Board mit dem SPM angeschlossen werden. Die Signalverarbeitung wurde hauptsächlich mit Hilfe des Mikrocontrollers durchgeführt und ist schematisch in Abbildung 2-6 zu sehen. Mittels der Daten, die am AnaloglDigital­ Wandler (ND) des Mikroprozessors anliegen, können die Temperatur, die Zwischenkreisspannung sowie die einzelnen Ströme ausgewertet werden. Bei einer Überschreitung der Temperatur am SPM wird der Frequenzumrichter durch den Mikrocontroller abgeschaltet. Ausgänge für Ansleuerung der IGBTs Im SPM +SV Ansleuerung für Anfangs­ ladeschaltung 4012 +SV +SV 1/0 Mikrocontroller MC9S12DP256B 1/0 r<---e:::::J--~ Flip·Flop zur Auswertung der Informationen zum _ _ Hardwereschutz +SV ,-----=--c~---, } 4044 ND - DIP-Schalter zur Einslellung der Soll-Frequenz DIP·Schalter zum Ein·' Ausschalten +SV TemperalurOberwachung SPM-Fehler Überwachung der Zwischenkreisspannung 1 U, Komparaloren zur Realisierung des Hardwareschulzes +SV --.---~-+-.----1--1 Überwachung der Ausgangsströme imSPM Einstellung der Referenzspannungen für Komparaloren Abbildung 2-6 Signa/verarbeitung Einer der acht Eingänge des (in der Abbildung 2-6 rechts) dient zum Starten bzw. zum Ausschalten des Frequenzumrichters. Die anderen sieben Eingänge dienen zur stufenweisen Vorgabe der Frequenz. Diese Vorgabe erfolgt am Versuchsobjekt in einer 14 Abstufung von 5Hz. Die Eingabe kann in der Versuchsanordnung mittels DIP-Schaltern realisiert werden. Der eigentliche Hardwareschutz bezüglich der Ströme und der Zwischenkreisspannung wird über die Komparatoren und das Flip-Flop gewährleistet. Die erfassten SpaIUmngen werden mit einem einstellbaren Referenzwert verglichen und mit dem Flip-Flop (4044) ausgewertet. Überschreitet ein Stromwert oder die Zwischenkreisspannung den voreingestellten Wert oder kommt ein Fehlersignal vom SPM, so wird am "emergency PWM-shutdown"-Eingang (PWM 7) das Signal zum Abschalten des Frequenzumrichters gegeben. Über den Reset-Taster kann diese Fehlermeldung wieder zurückgesetzt werden. Die Ausgänge PWM 0 bis PWM 5 steuern direkt die lGBTs im SPM an. Mit dem Ausgang am Mikrocontroller wird das Relais der Anfangsladeschaltung angesteuert. Die nachfolgenden Abbildungen zeigen die Schemata des Mikrocontroller-Programms. Das Hauptschema ist in Abbildung 2-7 zu sehen. Beim Start erfolgt zuerst eine Initialisierung der einzelnen Mikrocontrollergruppen (PWM-Einheit, Modus Counter, AJD- Wandler und llO Port), dann werden der notwendigen Interrupts freigeschalten. Initialisierung PWM, ADC, MC und I/O Port Freigabe der notwendigen Interrupts nein PWM-Ansteuersignale sperren PWM-Ansteuersignale ermöglichen Vorgabe der Frequenz d der Beschleunigungszeit ja nem Frequenzumrichter ausschalten Abbildung 2-7 Blockschema des Hauptprogramms 15 Anschließend wird abgefragt, ob der Frequenzumrichter eingeschaltet werden kann. Ist dies der Fall, so können die Ansteuersignale für das SPM generiert werden. Weiterhin werden die Vorgabe fur die Frequenz und die Temperatur des SPM abgefragt. Wird letztere überschritten, so wird der Frequenzumrichter abgeschalten. I Start ~ I Nächsten Interrupt ermöglichen ~ A/D-Wandlung starten [ Start ~ 1 Neuen Start der PWM ermöglichen ~ ~ Amplitudenfaktor der Ansteuerungssignale errechnen ~ Frequenz und Amplitude auf Null setzen Phasenwinkel der Ansteuerul1gssignale bestimmen ~ ~ Rückkehr des Interrupts BereitsteHung der 3-phasigen Pulsbreiten Abbildung 2-8 Blockschema der P WM-Emergence-Shutdown­ lnterrupt-Service-Routine ~ Übemalune der Ergebnisse der ND­ WandlUl1g ~ Rückkehr des Interrupts Abbildung 2-9 Blockschema der Modus-Counter-Interrupt­ Service-Routine In den Abbildungen 2-8 und 2-9 werden die Schemata für die PWM-Emergence­ Shutdown-Interrupt-Service-Routine und die der Modus-Counter-Interrupt-Service­ Routine dargestellt. Die Modus-Counter-Interrupt-Service-Routine wird durch den Interrupt-Request des gesetzten Modus-Counters regelmäßig abgerufen. In der Modus­ Counter-Interrupt-Service-Routine werden 3-phasigen Pulsbreiten für die nächste Pulsperiode bereitgestellt und an die Duty-Register der PWM-Kanäle übertragen. Die PWM-Emergence-Shutdown-Interrupt-Service-Routine dient zur Ennöglichung des neuen Starts nach einem Emergence Shutdown. 16 2.3.3 Messungen Abbildung 2-10 zeigt den verwendeten Versuchsaufbau des Frequenzumrichters. Deutlich zu erkennen ist das Evaluation Board mit dem Mikroprozessor. Dieser steuert über Serienwiderstände direkt das SPM an. -- Evaluation Board mit Mikrocontroller ~ Abbildung 2-10 Versuchsaujbau des Frequenzumrichters Vakuumpumpe mit Drehstromasynchronmotor Abbildung 2-11 Versuchsstand mit Vakuumpumpe D25B 17 Das SPM sitzt auf dem Kühlkörper, welcher in diesem Fall zusätzlich über einen Lüfter gekühlt werden muss. Gut zu erkennen sind ebenfalls der Zwischenkreisspeicher e8, die Spannungsversorgung für den Frequenzumrichter sowie die EMV-Platine. Der gesamte Aufbau des Versuches incl. Vakuumpumpe mit Antrieb ist in Abbildung 2-11 zu sehen. Um die Vakuumpumpe mit Antriebsmotor nicht in einer speziellen Anwendung, sondern unter reproduzierbaren Bedingungen zu untersuchen, wurde sie analog zum Punkt 2.1.1 frei im Raum aufgestellt und die Schallpegelmesssonden gemäß Abbildung 2-1 angeordnet. Am Luftaustritt der Pumpe war ein Ölfilter montiert, um die Abluft zu reinigen. Ein Vakuum und damit der Zustand des Leerlaufes konnte durch das Verschließen des Ansaugstutzens erreicht werden. Die akustischen Messpunkte (MP) liegen in einer Ebene mit der halben Maschinenhöhe. Die Messungen wurden an der warmgelaufenen Pumpe (thermisches Gleichgewicht) durchgefiihrt. Dies entspricht den Messbedingungen aus Punkt 2.1.1. Mittels des Frequenzumrichters wurden die Frequenz und die Eingangsspannung des Motors variiert. Der Schalldruckpegel wurde wieder mit dem Schallpegelmessgerät Brüel & Kjaer, Typ 2231 und die elektrische Leistung mit dem Leistungsmessgerät PZ4000 der Firma Yokogawa durchgeführt. 2.3.3.1 Anlaufkennline Um den Anlassstrom im zulässigen Strombereich zu begrenzen, werden die Frequenz und die Spannung des Frequenzumrichterausgangs gemäß der O.g. Vif-Kennlinie mit der geeigneter Frequenz-Beschleunigungsrate bis zum gewünschten Arbeitspunkt erhöht. Diagramm 2-8 zeigt einen Ausschnitt aus dem Verhalten eines Strangstromes beim Anlauf der Pumpe. 10.00 8,00 6,00 4,00 ~ 2,00­ GI ... .lIl: :1'0 iii 0, 00 E o ~ -2,00­ -4,00 ­ -6,00 -8,00 -10,00 +--,--.-----,-----,----,---,--.,.....--,---,,-----,---,--,--,---r--,---,---,---r-..,....--! O,Oe+OO 1,Oe+00 2,Oe+00 3,Oe+00 4,Oe+00 5.0e+00 6.0e+00 7.0e+00 8.0e+00 9.0e+00 Zeit t/s Diagramm 2-8 Stromverlauf beim Anlmt! in Abhängigkeit von der Zeit 18 Gut zu erkennen ist dabei, dass bei verschlossenem Ansaugstutzen der höchste Strom im Anlaufsvorgang nicht zum Einschaltzeitpunkt des Frequenzumrichters auftritt. Auf Grund der Funktionsweise der Pumpe steigt der Strom im Sekundenbereich erst zu einem etwas späteren Zeitpunkt an. Das Verhalten tritt bei jeder Temperatur auf, ist allerdings bei niedrigeren Temperaturen ausgeprägter zu beobachten. Aus Stabilitätsgründen sollte die vorgegebene Frequenz größer als ca. 20Hz sein, damit das ausreichende elektromagnetische Drehmoment gewährleistet werden kann. 2.3.3.2 Ergebnisse der elektrischen Messung bei Vakuum Diagramm 2-9 zeigt die Stromaufnahme des Motors und den entsprechenden Leistungsfaktor als Funktion der Frequenz der speisenden Spannung bei Leerlauf des Motors (aufgebautes Vakuum). Es ist zu erkennen, dass der Strom über den gesamten Regelbereich nahezu konstant bleibt. Die niedrigste Stromaufuahrne erfolgt bei einer Frequenz von f=30Hz. Bei diesem Wert wird gegenüber dem Betrieb bei der Nennfrequenz fN=50Hz eine Reduzierung von 7,7% der Stromaufuahme erreicht. 1.0 - 0,9 ~-1 ......- :=- 0,8 I- j I- I .s::. Q. ur o u... o 0,7 0,6 ~ 05 nI 'lil ' g' 0,4 ::J ~ 0,3 • I 2,40 "'" ""- '-I---~ 1 1."" "- 3~ 0,2 ~j . H' - I- 0,0 20 25 i I- I------ - f--- - ___ J I -f----.JI- --- - .i: ~r: r- I--- • ~ ~r ~II 2,10 180 <c:: , .""<---- r- ++ 1-[ I f- 1,50 E o 1,20 ~ ~ 0,90 - 0,60 0,30 - I 1 2,70 -l-~ . i - 1-+ 1 f----- I 0,1 __ --r- -'.r-I t-L_ - -1 Q) ~ c- - +1" ;=1 3,00 - i 30 - 0,00 35 40 45 50 55 60 Frequenz in Hz !_COS(Phi) ...... I/A I Diagramm 2-9 Stromaufnahme und Leistungsfaktor als Funktion der Frequenz 19 --+ '::::~: I ~ ~- J__ -: 800,0 - 1 600,0 . 400,0 300,0 100,0 0,0 t - . I -. - • :-/.-e­ I -'" ........ I I......... - I -- t-4 -'4 -, ............. I -­ ,~ -+---+_+---+-_ I--=-!'ooo"""""!,..,--l­ -~~ ....-4p""" ~ :!I _""'-""""'" .... ~c+_-+--I____---j--i /­ J' -­ -.. L - 7'L1---+----I·-+--+-----l--+---I 1/ -=-----t. -~I --+~••""""l---+---t­ /" ~ •• -- -I ~ r t -t ­ I _I'=--~" - 200,0 I ~ t ..q ~. 700,0 500,0 . ~ '[ ..... - -+-----1 -----'-_j_ .­ _-L-_I-­ .----_+_­ ;1.-+--+-+---t--~ ­ - -- ­ r­ + - --+-­ I-.=--f - +----'---+----I-~--'----i---_----'--~-"--_----'--_+_-'--_4_-~__l 20 25 30 35 40 45 50 55 60 Frequenz In Hz Diagramm 2-10 Leistungen als Funktion der Frequenz Im Diagramm 2-10 sind die Wirk-, Blind- und Scheinleistung ebenfalls als Funktion der Frequenz der Spannung dargestellt. Hier ist zu erkennen, das der optimale Arbeitspunkt des Motors im Bereich von f=30Hz liegt. Es ist eine Reduzierung der Wirkleistung um 45% gegenüber der Wirkleistung bei fN =50Hz möglich. Bei einer derartigen Absenkung reduziert sich der Blindleistungsbedarf um 48,7%. 2.3.3.3 Ergebnisse der akustischen Messung bei Vakuum Diagramm 2-11 zeigt den Schal1druckpegel L AF in dB in Abhängigkeit von der Frequenz. Dabei sei an dieser Stel1e nochmals festgestel1t, dass hier nicht nur die Frequenz, sondern gleichzeitig die Spannung verändert wird. An der Längsseite reduziert sich der Pegel bei Absenkung der Frequenz auf 30Hz, um 9,4dB und an der Ein-, Auslassseite sogar um 1O,7dB. An der Stirnseite beträgt die Verringerung des Schalldruckpegels 6,6dB. Wird die Frequenz weiter auf 20Hz reduziert, so kann auch der Schalldruckpegel weiter abgesenkt werden. Im konlaeten Fall sinkt dann der Pegel an der Längsseite um 12,4dB, an der Ein- Auslassseite um 14,7dB und an der Stirnseite um 9,7dB. Allerdings waren bei den niedrigeren Frequenzen auch störende klopfende Geräusche zu hören. Da bei f=30Hz die Motor-Pumpen-Kombination als am ruhigsten laufend empfunden wurde, ich auch hier der optimale Punkt bei oben genannter Frequenz festzulegen. 20 69 i ,-f­ 67 - t 65 - il:l 63 - I 'll .i!I "­ 61 < ­ ... ". : A. ... ...';;... t--=+±. - - 1- I, j - I 30 35 - -J- - '-- _......1;_-- 1 _ 1 -+---1--1---+---1- i ",... /' -' -' - - 59 ... :! '" - 57 I ' - -­ 55 -. .. 53 51 ­ - _._-­ 49 20 25 40 45 55 50 60 Freq uenz I n Hz I-UlngSSeile -80-, Auslassseile -Stirnseite I Diagramm 2-11 Schalldruckpegel als Funktion der Frequenz 2.3.4 Zusammenfassung Die Versuche haben gezeigt, dass vor allem eine sehr deutliche Verminderung der Geräuschemission durch den Einsatz eines Frequenzumrichters mit der untersuchten Motor-Vakuumpumpen-Kombination möglich ist. Weiterhin ist es gelungen, den Energiebedarf im Leerlauf zu reduzieren. Auf Grund der störenden Nebengeräusche unterhalb der Frequenz von 30Hz wird der optimale Arbeitspunkt bei f=30Hz fur die untersuchte Anwendung vorgeschlagen. 3 Bewertung der Ergebnisse Bereits die Vonmtersuchungen mit dem Wechselstrommotor und einem Stelltransformator bzw. mit der Drehstrom-Asynchronmaschine und einem 3-Phasen-Stelltransformator haben das Einsparungspotential von elektrischer Energie sowie die Reduzierung der Geräuschemission deutlich gezeigt. Ziel der Entwicklung und Anpassung des Frequenzumrichters war es, diese Ergebnisse, die bei reiner Spannungsabsenkung erzielt wurden, mit Hilfe leistungselektronischer Mittel noch zu verbessern. Dabei sei an dieser Stelle noch einmal betont, dass die Anwendung eines Stelltransfonnators aus praktischen Erwägungen keine Rolle spielt und hier lediglich Anhaltspunkte für die Verbesserung des Antriebs geben sollte. Wie bereits mehrfach erwähnt wurde, hat ein Drehstrom-Asynchronmotor gegenüber einem Wechselstrommotor wesentliche Vorteile beim Einsatz als Antrieb für Vakuumpumpen. Neben den erreichten Ergebnissen der Voruntersuchung mittels 3­ Phasen-Stelltransformator ging es vor allem auch darum, eine 230/400V-Drehstrom­ Asynchronmaschine am I-Phasen Netz zu betreiben und die dafür notwendigen Mehrkosten zu minimieren. Dies ist nur durch die Anwendung eines SPM­ Frequenzumrichters möglich. 21 Durch die Verringerung der Amplitude und der Frequenz der am Motor anliegenden Spannung war es möglich, eine wesentliche Reduzierung der Wirkleistung im Quasi­ Leerlauf (bei aufgebautem Vakuum) zu erreichen. In dem fur diese Pumpen-Motor­ Kombination ennittellten optimalen Punkt bei f=30Hz, konnte eine Reduzierung der Wirkleistung um 45% gegenüber den Messungen bei fN=50Hz realisiert werden. Dies entspricht zwar nicht ganz dem Ziel von 50%, betrachtet man jedoch die gemessene Wirkleistung des Wechselstrommotors bei der Nennspannung UN=230V als Grundlage, so sinkt der Wirkleistungsanteil sogar um 67%. Obwohl die gemessenen Schalldruckpegel bei Nennspannung und Nennfrequenz beim Einsatz der Drehstrom-Asynchronmaschine mit Frequenzumrichter durchschnittlich 3,3dB höher lagen als beim Einsatz des Wechselstrommotors, waren im sie optimalen Punkt bei f=30Hz durchschnittlich 2,2dB niedriger als die Minimalwerte und sogar durchschnittlich 4,5dB niedriger als die Messwerte im angegebenen optimalen Bereich von U=160V ... 180V beim Einsatz des Wechselstrommotors. Wesentlich ungünstiger waren die Oberschwingungen im Motorstrom bei der Übermodulation im Frequenzbereich von ca. 42,5Hz bis 50Hz. Dieses Problem lässt sich jedoch durch die zusätzliche Verwendung einer PFC-Schaltung (power-factor-correction­ Schaltung) wirkungsvoll reduzieren. Probleme bereitete der Schweranlauf der Pumpe bei geringen Temperaturen und der damit verbundene starke Anstieg des Stromes. Durch das Anlaufsverfahren mit niedriger Frequenz und niedriger Spannung karm der Anlassstrom wesentlich verringert werden. Für den extremen Fall, dass über längeren Zeitraum ein großer Drehmomentbedarf besteht, karm es sein, dass die Ströme an die vorgegebenen Grenzen des SPM stoßen. Durch eine entsprechende Dimensionierung des SPM, d.h. durch Überdimensionierung bezüglich des Nermbarbeitspunktes körmte dieses Problem umgangen werden. Dabei ist festzustellen, dass die Preisunterschiede zwischen dem verwendeten SPM und dem nächst größeren Modell relativ gering sind. 4 Ausblick Bei weiterftihrenden Arbeiten müssten folgende Punkte untersucht werden: • Ist eine leistungselektronische Anpassung der Zwischenkreisspannung (z.B. Boost­ Konverter) an unterschiedliche Ebenen der speisenden Wechselspannung in Verbindung mit Standard-ASM ökonomisch vertretbar? Damit könnte die Schaltung flexibler eingesetzt und in größeren Stückzahlen produziert werden, was letztendlich einen positiven Einfluss auf die Kosten ausübt. • Ist - alternativ zum ersten Punkt - eine spannungsmäßige Anpassung der ASM an unterschiedliche Ebenen des speisenden Wechselspannung günstiger? • Sollte bei einer leistungselektronischen Sparmungsanpassung eine PFC-Funktion integriert werden, um einen Leistungsfaktor cos( CI» des Gesamtsystems von etwa 1 zu erreichen? Allerdings ist zu beachten, dass die Oberschwingungsnorm EN 61 000-3-2 beim Betrieb des Frequenzumrichters in jedem Fall einzuhalten ist. Der Einsatz von rein passiven Filter-Schaltungen wie Netzdrosseln ist nur im unteren Leistungsbereich bis ca. 200W sirmvoll möglich, da bei größeren Leistungen die Netzdrosseln zu übermäßigen Spannungsverlusten fuhren und die Effektivität des Stromrichters beeinträchtigen. Günstiger erscheint fur diese Anwendung der Einsatz einer aktiven PFC-Schaltung. Grundprinzip ist die Regelung der 22 Stromaufnahme aus dem Netz so, dass der Stromverlauf sinusförrnig und in Phase zur Netzspannung ist. Da die aktive PCF-Schaltung einen Hochsetzsteller beinhaltet, könnte die Zwischenkreisspannung immer auf den erforderlichen Spannungswert gebracht werden, unabhängig davon, ob der Frequenzumrichter an 230V oder an andere Spannungsebenen angeschlossen wird. Gleichzeitig wäre es möglich auf die_bereits beschriebene Übermodulation zu verzichten und auch so am Ausgang des Frequenzumrichters die Nennspannung des Motors zu erreichen. Ein weiterer Vorteil ergibt sich daraus, dass durch die PFC-Schaltung eine konstante Zwischenlaeisspannung realisiert werden kann. Momentan ist diese von der Last abhängig. Nicht endgültig geklärt werden konnte, inwieweit der bei den Untersuchungen verwendete Anlauf den Erfordernissen der Praxis entspricht. Hier wurde dieser gemäß Diagramm 2-7 realisiert. Dabei kommt es auf Grund der Funktionsweise der Vakuumpumpe zu unregelmäßigen Drehbewegungen, bis die Pumpe sicher angelaufen ist. Muss ein anderes Anlaufkonzept angewendete umgesetzt werden, ist zwangsläufig der Frequenzumrichter größer zu dimensioniert. Weiterhin ist zu betonen, dass die hier gemessenen Werte, insbesondere die der Geräuschrnessung, exemplarisch fUr die verwendete Pumpe und die verwendeten Motoren aufgenommen worden. Es ist zwar sicherlich nicht zu bezweifeln, dass eine Absenkung der Drehzahl im Leerlauffall prinzipiell zu einem Absinken der Verlustleistungen und Geräuschemissionen fUhrt, jedoch ist denkbar, dass die optimalen Betriebswerte fl.ir jede Pumpenart oder sogar fUr jede Kombination von Motor und Pumpe unterschiedlich sind. Überlegenswert erscheint die Übertragung der Ergebnisse der Anwendung eines Frequenzumrichters flir die Vakuumpumpe auf den Antrieb von Hydraulikpumpen. Hier werden vor allem in mobilen Arbeitsmaschinen momentan hydraulische Antriebe genutzt, die überwiegend eine vorn Dieselmotor direkt angetriebene Pumpe als zentrale Druckversorgung besitzen. Die Ansteuerung der einzelnen Verbraucher erfolgt mit einem Load-Sensing-System. Dabei arbeitet die Pumpe ständig mit der Drehzahl des Dieselmotors, auch im Leerlauf oder im stand-by Betrieb. Dies fUhrt zu unerwünschten Energieverlusten. Der Energienutzungsgrad würde sich auch hier durch drehzahlgeregelte Pumpenantriebe (elektrisch-hydrostatischer Antrieb) wesentlich erhöhen lassen. Für den mobilen Einsatz sind kostengünstige, integrierte, drehzahlveränderliche Antriebssysteme im Leistungsbereich bis über 20kW erforderlich, augenblicklich jedoch nicht verfUgbar. Zur Abdeckung dieses Leistungsbereiches bieten sich Hydraulikpumpen mit konstantem Volumenstrom (z.B. Innenzahnradpumpen) an, die von einem drehzahlgeregelten Elektromotor getrieben werden. 23 5. Anhang Tabelle 5-1 elektrische Messwerte Wechselstrommotor mit Stelltransformator UN 100 120 140 160 180 200 210 220 230 240 253 IIA 3,5 3,11 2,9 2,9 2,94 3,13 3,4 3,84 4,6 5,4 7 cos«(/J) 0,999 0,99 0,99 0,988 0,98 0,94 0,88 0,82 0,73 0,67 0,59 PIW 351 376 418 465 521 588 632 690 782 868 1059 SNA 353 376 420 469 527 622 711 848 1060 1295 1786 Q/var 15,2 30,7 56,4 70,6 92,5 205 328 490 720 958 1426 t/J 2,41 4,76 7,76 8,6 9,96 19 27,4 35,5 43,11 48,05 53,7 Tabelle 5-2 Schalldruckpegel für Wechselstrommotor mit Stel/transformator LAF/dB UN 100 120 140 160 180 200 210 220 230 240 253 Längsseite 56,0 57,2 58,9 57,9 58,6 59,0 58,7 58,9 59,1 59,2 60,0 Ein-,Auslassseite 57,6 58,8 59,4 59,8 59,5 61,0 61,4 60,9 60,9 61,0 61,7 Stirnseite 55,2 56,8 57,9 58,1 58,1 58,8 58,6 59,1 58,9 58,7 59,1 Tabelle 5-3 elektrische Messwerte Drehstrom-ASM mit 3-Phasen-Stelltransformator UN 60 70 80 90 100 110 120 130 IIA 2,31 1,99 1,91 1,87 1,93 2,04 2,22 2,50 cos( (/J) 0,845 0,809 0,762 0,686 0,614 0,546 0,487 0,430 PIW 355,4 344,5 349,8 346,5 357,7 370,9 393,6 424,5 SNA 420,5 425,7 458,9 505,2 582,4 (,79,3 807,6 987,9 Q/var 224,8 250,1 297,0 367,5 459,1 569,0 705,0 891,9 (/J 32,3 36,0 40,3 46,7 52,1 56,9 60,8 64,6 24 Tabelle 5-4 Schalldruckpegel für Drehstrom-ASM mit 3-Phasen-Stelltransformator UN 60 70 80 90 100 110 120 130 LAF/dB Längsseite 63,2 64,1 66,5 61,9 60,9 60,6 61,0 61,1 Ein-,Auslassseite 58,8 59,2 60,3 60,6 60,6 61,5 62,2 61,9 Stirnseite 56,4 57,1 57,8 58,3 57,7 57,3 57,4 58,2 Tabelle 5-5 elektrische Messwerte Drehstrom-Asynchronmaschine mit Frequenzumrichter flHz 20 25 30 35 40 45 50 55 60 T/A 2,61 2,52 2,15 2,33 2,32 2,43 2,33 2,30 2,22 UN 43,57 56,11 70,48 84,81 98,48 111,42 120,18 120,99 119,66 cos(l/J) 0,849 0,781 0,577 0,569 0,541 0,533 0,549 0,634 0,692 PIW 291,6 331,2 261,8 334,3 372,7 431,4 475,3 522,9 548,5 SNA 343,6 424,3 453,9 587,2 689,2 809,0 865,3 825,4 793,1 Q/var 181,4 265,2 370,8 482,7 579,8 688,8 722,4 638,5 572,7 f/J 31,9 38,6 54,8 55,3 57,2 57,8 56,7 50,7 46,2 Tabelle 5-6 Schalldruckpegel für Drehstrom-Asynchronmaschine mit Frequenzumrichter LAF/dB flHz 20 25 30 35 40 45 50 55 60 ILängsseite 51,3 52,5 54,3 1 58 ,5 Gl,4 :12,1 G3,7 162,1 (j4,2 Ein-,Auslassseite 50,7 53,4 54,7 58,3 60,8 64,2 65,4 67,4 68,1 Stirnseite 50,1 51,1 53,2 55,9 57,9 59,2 59,8 61,5 63,1 25 6. Literatur FAIRCHILD Semiconductor Corporation; Datenblatt FSAM15SH60; FSANIl5SH60.pdf, 2002; http://www.fairchild.com FAIRCHILD Semiconductor Corporation; Datenblatt FSAM20SH60; FSAM20SH60.pdf, 2002; http://www.fairchild.com HENKE, Thomas; "Frequenzumrichter mit PFC erfüllte Stromoberschwingungsnorm" in etz, Heft 10/2003; S.34-37 HITACHI; Datenblatt ECN3067; 3067sp.pdf; http://www.hitachi.co.jp/pse 26